ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Изобретение в целом относится к аппарату для захвата изделий в форме кассеты, в частности, для захвата, удерживания и обеспечения движения реагента или кассеты образца как части автоматического диагностического анализатора.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Диагностические клинические анализаторы становятся все более сложными, особенно с точки зрения удерживания и перемещения образцов и соответствующих реагентов с множеством положений. Множество сложных переносчиков для захвата и установки превратилось в роботизированные системы, способные к двумерным, и, в некоторых случаях, к трехмерным перемещениям контейнеров с образцами. Несмотря на это, эволюция аппаратов для физического захвата и удерживания таких контейнеров не продвинулась, в особенности, если эти контейнеры являются не простыми пробирками, а такими устройствами, как, например, герметичные мембранные кассеты для реакций агглютинации, приведенные в патенте США № 5780248, включенном в настоящий документ в полном объеме в виде ссылки. Более того, такой захват контейнеров с образцами возможен для небольшого количества основных механизмов. Станки с кулачковым приводом обладают такими свойствами, как плавность движений и управление ускорением и замедлением. Они могут запускаться с высокой частотой циклов, однако они большие, тяжелые и не пригодны для применения в пространстве с недостатком места. Машины с пневматическим/гидравлическим приводом более компактны и легки в использовании, но поскольку они обычно используют гидравлическое/пневматическое давление для перемещения компонентов, в них происходят толчки (что особенно важно при удерживании кассет, содержащих компоненты цельной крови), что превращает их в шумные машины с низкой частотой циклов. Машины с серводвигателем/шаговым двигателем обычно более медленные, могут быть более дорогими, но они гибки в эксплуатации. Патент США № 5681530 относится к системам транспортировки инструментов для анализа жидкостей, которые включают захват для кассеты и конвейер, и включен в настоящий документ во всей своей полноте в виде ссылки.
С точки зрения захвата образцов существующие механизмы являются механическими комплексами с множеством частей. В дополнение к тому, что они обладают ограниченной возможностью захвата и удержания смещенных контейнеров с образцами, в связи с ограниченной двигательной функцией эти устройства дороги для производства и часто недостаточно надежны. Более того, большинство механизмов передают значительную инерционную силу контейнерам для образцов, что очень нежелательно и потенциально может привести к изменениям физических свойств образца. Известны следующие номера систем: Патент США № 4002247, озаглавленный как “Machine for picking up, transferring, turning and placing parts,” патент США № 4411576, озаглавленный как “Pick and place mechanism,” патент США № 4975018, озаглавленный как ““Linear unit for transferring objects,” патент США № 5249663, озаглавленный как “Apparatus to load workpieces,” патент США № 5333720, озаглавленный как “Apparatus to manipulate workpieces,” патент США № 5467864, озаглавленный как “Dual purpose apparatus to manipulate workpieces,” патент США № 5564888, озаглавленный как “Pick and place machine,” патент США № 6264419, озаглавленный как “Robot arm,” патент США № 6293750, озаглавленный как “Robotics for transporting containers and objects within an automated analytical instrument and service tool for servicing robotics,” патент США № 6374982, озаглавленный как “Robotics for transporting containers and objects within an automated analytical instrument and service tool for servicing robotics,” патент США № 6843357, озаглавленный как “Two-axis robot for specimen transfer,” патент США № 6889119, озаглавленный как “Robotic device for loading laboratory instruments,” патент США № 7131361, озаглавленный как “Workpiece-transfer device,” патент США № 7448294, озаглавленный как “Robotic devices,” патент США № 7563067, озаглавленный как “Robot,” международная публикация договора о патентной кооперации № WO2008067847, озаглавленная как “Container transfer apparatus with automatic positioning compensation,” и публикация США № 2010/0150688, озаглавленная как “Workpiece transfer system.”
Ни в одной из приведенных выше ссылок не описывается аппарат, способный действовать в ограниченном пространстве, имеющий минимальное количество частей, способный к захвату кассет с образцами со значительным смещением, и придающий движения аппарата, в частности, способствующее захвату и удерживанию контейнеров с образцами, которые не имеют форму пробирки.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Целью изобретения является устранение или, по меньшей мере, смягчение упомянутых выше недостатков настоящего уровня техники.
Одним из аспектов настоящего изобретения является аппарат для захвата изделий в форме кассеты. Аппарат включает в себя: корпус опоры; линейный исполнительный механизм, перемещающийся вдоль оси x относительно опоры; набор зажимов для захвата изделия в форме кассеты, каждый зажим имеет проксимальный и дистальный конец, и дистальный конец приспособлен для захвата изделия в форме кассеты; подвижный узел, расположенный на проксимальном конце каждого зажима, соединяющий каждый зажим с линейным исполнительным механизмом; фиксированный узел относительно опоры, расположенный между проксимальным и дистальным концом каждого зажима для соединения каждого зажима с опорой, где фиксированный узел опосредованно расположен на зажимах и соединен с ним при помощи соединения и подвижного узла на зажимах; и где движение линейного исполнительного механизма обеспечивает движение подвижного узла по оси x и y, тем самым поворачивая зажимы вокруг фиксированного узла, что приводит к раскрытию и закрытию зажимов.
Другим аспектом настоящего изобретения является аппарат для захвата изделий в форме кассеты. Аппарат включает в себя: корпус опоры; линейный исполнительный механизм, подвижный вдоль оси x относительно опоры; набор зажимов для захвата изделия в форме кассеты, каждый зажим имеет проксимальный и дистальный конец, и дистальный конец приспособлен для захвата изделия в форме кассеты; подвижный узел, расположенный на проксимальном конце каждого зажима, соединяющий каждый зажим с линейным исполнительным механизмом; фиксированный узел относительно опоры, расположенный между проксимальным и дистальным концом каждого зажима для соединения каждого зажима с опорой, где фиксированный узел расположен непосредственно на зажимах; привод сцепления, соединенный с линейным исполнительным механизмом в его центре, где привод сцепления имеет удлиненные пазы на каждой стороне центра, при этом подвижные узлы с возможностью скольжения входят в зацепление в эти пазы, после чего движение линейного исполнительного механизма приводит к движению привода сцепления, который вызывает линейное движение подвижного узла в направлении, перпендикулярном направлению скольжения, тем самым вращая зажимы вокруг фиксированного узла и приводя к раскрытию и закрытию зажимов; набор фиксирующих штырей, присоединенных к низу корпуса возле дистального конца каждого зажима, которые располагают таким образом, чтобы они могли примыкать к изделию в форме кассеты после того, как это изделие в форме кассеты было захвачено, у верхнего конца корпуса располагается податливый блок; и пружина, расположенная под податливым блоком, которая позволяет корпусу слегка отклоняться, поскольку захват кассеты направляется при помощи фиксирующих штырей, и движение изделия в форме кассеты направляется податливым блоком и пружиной, обеспечивающей возможное отклонение аппарата относительно изделия в форме кассеты.
Тем не менее, другим аспектом настоящего изобретения является способ захвата изделия в форме кассеты. Способ включает в себя в себя: обеспечение корпуса опоры; обеспечение линейного исполнительного механизма, подвижного вдоль оси x относительно опоры; обеспечение набора зажимов для захвата изделия в форме кассеты, где каждый зажим имеет проксимальный и дистальный конец, и дистальный конец приспособлен для захвата изделия в форме кассеты; обеспечение подвижного узла, расположенного на проксимальном конце каждого зажима, соединяющего каждый зажим с линейным исполнительным механизмом; обеспечение наличия фиксированного узла относительно опоры, расположенного между проксимальным и дистальным концом каждого зажима для соединения каждого зажима с опорой, где фиксированный узел опосредованно расположен на зажимах и соединен с ними при помощи соединения и подвижного узла, который расположен на зажимах; позиционирование корпуса таким образом, чтобы он располагался над захватываемым изделием в форме кассеты; движение линейного исполнительного механизма, который обеспечивает движение подвижного узла по оси x и y, тем самым поворачивая зажим относительно фиксированного узла, что приводит к закрытию зажимов и захвату изделия в форме кассеты.
Еще одним аспектом настоящего изобретения является способ захвата изделия в форме кассеты. Способ включает в себя: обеспечение корпуса опоры; обеспечение линейного исполнительного механизма, подвижного вдоль оси x относительно опоры; обеспечение набора зажимов для захвата изделия в форме кассеты, где каждый зажим имеет проксимальный и дистальный конец, и дистальный конец приспособлен для захвата изделия в форме кассеты; обеспечение подвижного узла, расположенного на проксимальном конце каждого зажима, соединяющего каждый зажим с линейным исполнительным механизмом; обеспечение фиксированного узла относительно опоры, расположенного между проксимальным и дистальным концом каждого зажима для соединения каждого зажима с опорой, где фиксированный узел расположен непосредственно на зажимах; обеспечение привода сцепления, соединенного с линейным исполнительным механизмом в его центре, причем привод сцепления имеет удлиненные пазы на каждой стороне центра, при этом подвижные узлы с возможностью скольжения входят в зацепление в эти пазы; обеспечение набора фиксирующих штырей, присоединенных к низу корпуса возле дистального конца каждого зажима, который располагается таким образом, чтобы он мог примыкать к изделию в форме кассеты после захвата этого изделия; обеспечение податливого блока у верхнего конца корпуса и пружины под податливым блоком, который позволяет корпусу отклоняться; позиционирование корпуса таким образом, чтобы он располагался над захватываемым изделием в форме кассеты; движение линейного исполнительного механизма, что приводит к движению привода сцепления, который вызывает линейное движение подвижного узла в направлении, перпендикулярном направлению скольжения, тем самым вращая зажимы вокруг фиксированного узла и приводя к закрытию зажимов и захвату изделия в форме кассеты; где захват кассет направляется при помощи фиксирующих штырей, и движение изделия в форме кассеты направляется при помощи податливого блока и пружины, допускающей возможное отклонение аппарата относительно изделия в форме кассеты.
В предпочтительном варианте осуществления настоящего изобретения аппарат способен аккуратно захватывать и безопасно удерживать диагностические кассеты даже при наличии умеренного отклонения.
Однако в другом предпочтительном варианте осуществления настоящего изобретения захватывающие зажимы аппарата одновременно движутся в двух направлениях таким образом, что расстояние между зажимами уменьшается в то же время, что они движутся вверх в вертикальном направлении, благодаря чему требуется минимальное количество пространства.
Тем не менее, в другом предпочтительном варианте осуществления настоящего изобретения представлен аппарат, обладающий высокой надежностью и имеющий минимальное количество частей, и поэтому являющийся недорогим для производства.
В другом предпочтительном варианте осуществления настоящего изобретения аппарат конструируется из комбинации зацеплений, зубчатых реек и механических сцеплений, которые обеспечивают более плавное движение, чем в устройствах с кулачковым, пневматическим или гидравлическим приводом, и который, в частности, способен не изменять физические характеристики чувствительных образцов.
В предпочтительном варианте осуществления настоящего изобретения изобретение включает в себя такие пружинящие движения вертикального привода, чтобы аппарат мог допускать значительную степень отклонения и/или отклонения при захвате во время маневра для захвата кассеты. Движение механических частей, захватывающих кассету, происходит таким образом, чтобы физическое состояние образца не было нарушено, и чтобы механический процесс захвата кассеты мог происходить при минимуме пространства.
В другом предпочтительном варианте осуществления настоящего изобретения изобретение включает в себя механизм Хойкена.
В еще одном предпочтительном варианте осуществления настоящего изобретения изобретение фиксирует контейнер с образами напротив фиксирующих штырей, имеющих оптический сенсор или другое устройство обратной связи, которое указывает, что контейнер с образцами был успешно захвачен. Дополнительные цели, признаки и преимущества настоящего изобретения будут очевидными для специалистов в данной области техники после подробного рассмотрения представленных далее вариантов осуществления изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
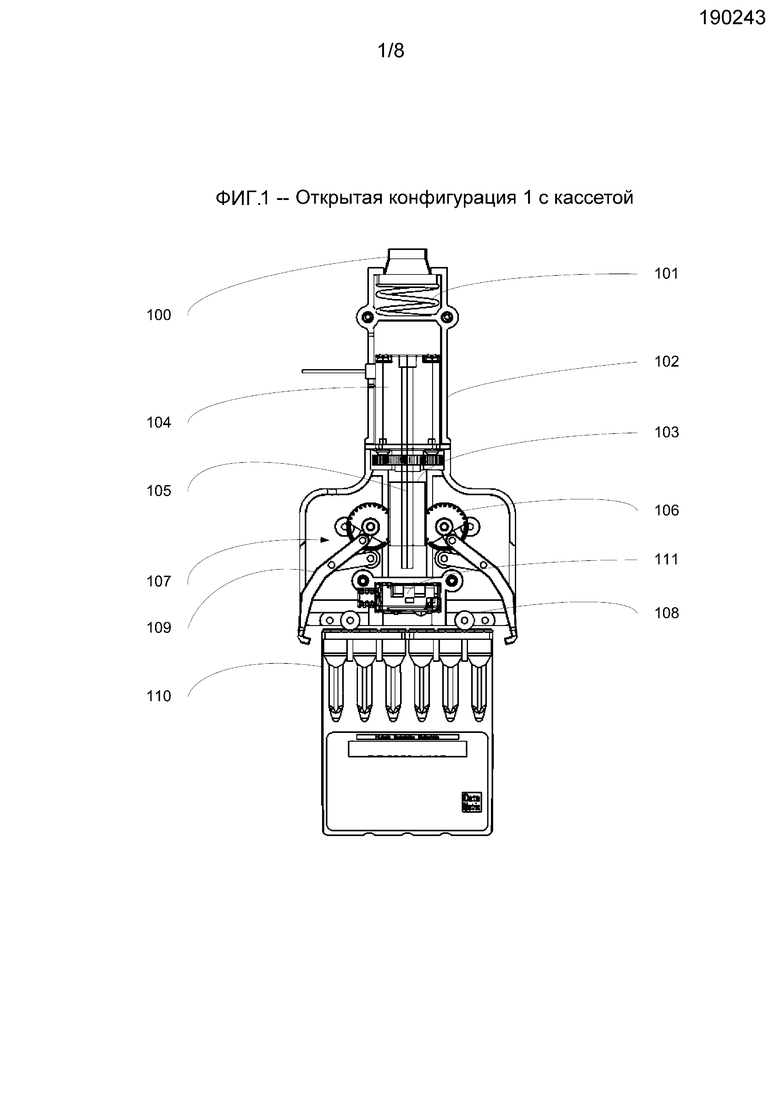
Фиг. 1 является схематическим видом спереди аппарата для захвата и удерживания кассет в открытом положении в соответствии с конфигурацией 1 предпочтительного варианта осуществления настоящего изобретения. Аппарат, также известный как устройство для захвата кассет, находится внутри корпуса 102, который содержит линейное исполнительное устройство, например, электрический серводвигатель 104, соединенный или сконфигурированный как ходовой винт 105. Серводвигатель 104 имеет ствол, сконфигурированный как ходовой винт 105, который имеет резьбу для зубчатой гайки 103 или, в другом случае, подсоединяющийся к ходовому винту при помощи вращающейся муфты. Секторный привод сцепления 106 прикрепляется с возможностью вращения к корпусу 102 и конфигурируется как механизм Хойкена 107, имеющий набор зажимов 109. Конец набора зажимов 109, подсоединяющийся к секторному приводу сцепления 106, обозначается как проксимальный конец, и конец набора зажимов 109, который захватывает диагностическую кассету 110, обозначается как дистальный конец. Движение кассеты вверх 110 ограничивается при помощи набора фиксирующих штырей 108. Податливый блок 100, такой как упругий блок, и пружина 101 позволяет устройству для захвата кассет захватывать и устанавливать отклоненные кассеты. Присутствующая или отсутствующая кассета 110 безопасным образом прижимается к фиксирующим штырям 108, которые способны ее опознавать при помощи оптического сенсора 111.
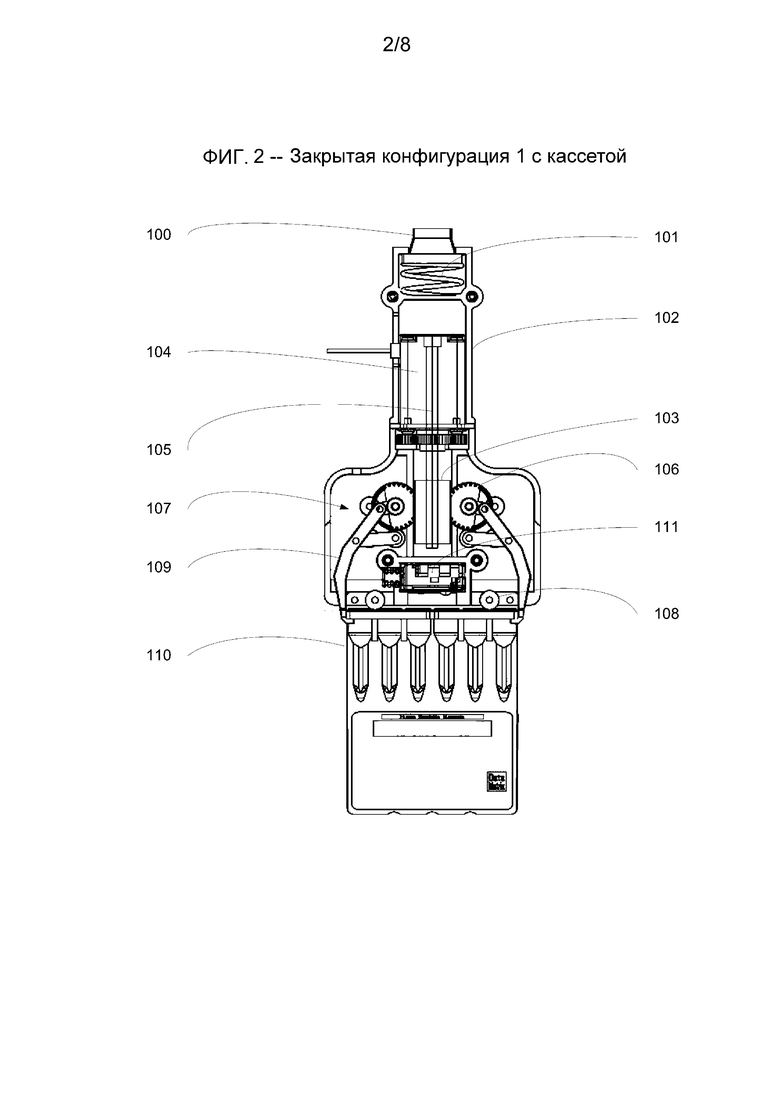
Фиг. 2 является схематическим видом спереди аппарата для захвата и удерживания кассет в соответствии с конфигурацией 1 предпочтительного варианта осуществления настоящего изобретения. Аппарат находится внутри корпуса 102, который содержит линейное исполнительное устройство, например, электрический серводвигатель 104, соединенный или сконфигурированный как ходовой винт 105. Серводвигатель 104 имеет ось, сконфигурированную как ходовой винт 105, который имеет резьбу для зубчатой гайки 103 или, в другом случае, подсоединяющийся к ходовому винту при помощи вращающейся муфты. Секторный привод сцепления 106 прикрепляется с возможностью вращения к корпусу 102 и конфигурируется как механизм Хойкена 107, имеющий набор зажимов 109. Движение кассеты вверх 110 ограничивается при помощи набора фиксирующих штырей 108. Податливый блок 100 и пружина 101 позволяет устройству для захвата кассет захватывать и устанавливать отклоненные кассеты. Присутствующая или отсутствующая кассета 110 безопасным образом прижимается к фиксирующим штырям 108, которые способны ее опознавать при помощи оптического сенсора 111.
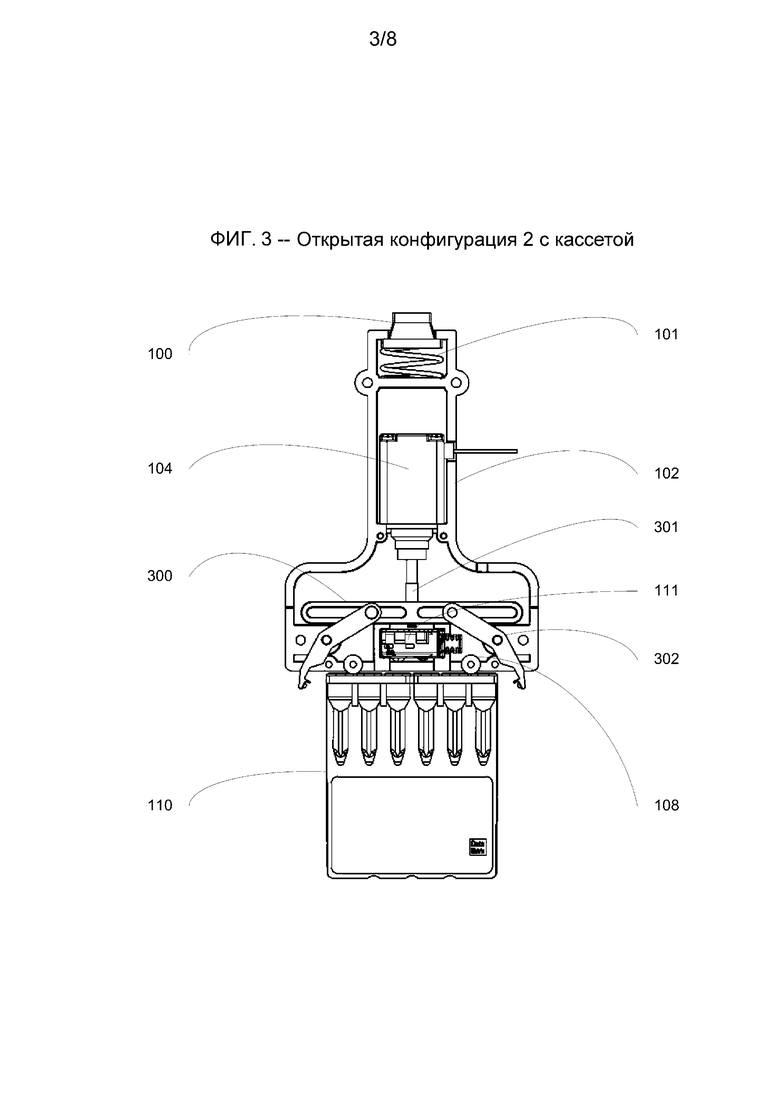
Фиг. 3 является схематическим видом спереди аппарата для захвата и удерживания кассет, также известного как устройство для захвата кассет, в открытом положении в соответствии с конфигурацией 2 предпочтительного варианта осуществления настоящего изобретения. Аппарат находится внутри корпуса 102, который содержит линейное исполнительное устройство, например, электрический серводвигатель 104, соединенный или сконфигурированный как ходовой винт. Серводвигатель 104 имеет ось 301, сконфигурированную как ходовой винт, который имеет резьбу для приводного звена 300, или, в другом случае, подсоединяющийся к ходовому винту при помощи вращающейся муфты. Набор зажимов 302 установлен таким образом, что верхний конец набора зажимов 302, который присоединяется к приводному звену 300, обозначается как проксимальный конец, и нижний конец набора зажимов 302, который захватывает диагностическую кассету, обозначается как дистальный конец. Набор зажимов 302 присоединяется к приводному звену 300 так, что проксимальный конец зажима 302 может скользить в горизонтальном направлении в пределах приводного звена 300. Движение кассеты вверх 110 ограничивается при помощи набора фиксирующих штырей 108. Податливый блок 100 и пружина 101 позволяет устройству для захвата кассет захватывать и устанавливать отклоненные кассеты. Присутствующая или отсутствующая кассета 110 безопасным образом прижимается к фиксирующим штырям 108, которые способны ее опознавать при помощи оптического сенсора 111.
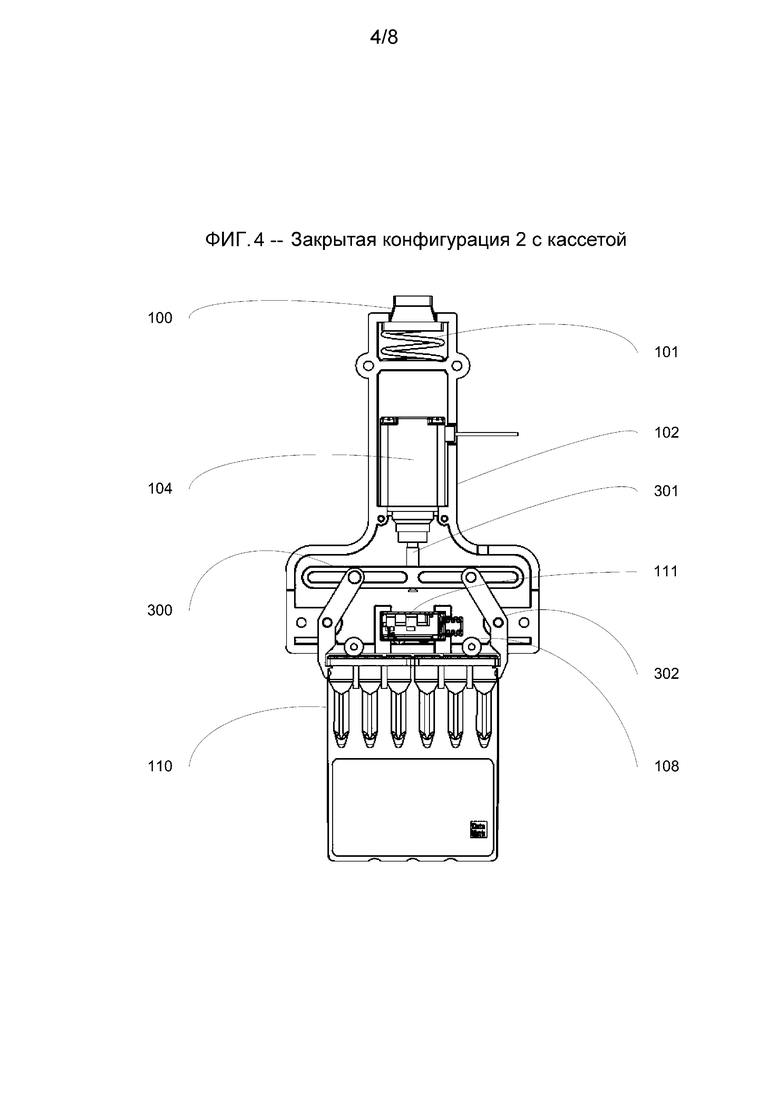
Фиг. 4 является схематическим видом спереди аппарата для захвата и удерживания кассет, также известного как устройство для захвата кассет, в закрытом положении в соответствии с конфигурацией 2 предпочтительного варианта осуществления настоящего изобретения. Аппарат находится внутри корпуса 102, который содержит линейное исполнительное устройство, например, электрический серводвигатель 104, соединенный или сконфигурированный как ходовой винт. Серводвигатель 104 имеет ось 301, сконфигурированную как ходовой винт, который имеет резьбу для приводного звена 300, или, в другом случае, подсоединяющийся к ходовому винту при помощи вращающейся муфты. Набор зажимов 302 присоединяется к приводному звену 300 так, что проксимальный конец зажимов 302 может скользить в пределах приводного звена 300. Движение кассеты вверх 110 ограничивается при помощи набора фиксирующих штырей 108. Податливый блок 100 и пружина 101 позволяет устройству для захвата кассет захватывать и устанавливать отклоненные кассеты. Присутствующая или отсутствующая кассета 110 безопасным образом прижимается к фиксирующим штырям 108, которые способны ее опознавать при помощи оптического сенсора 111.
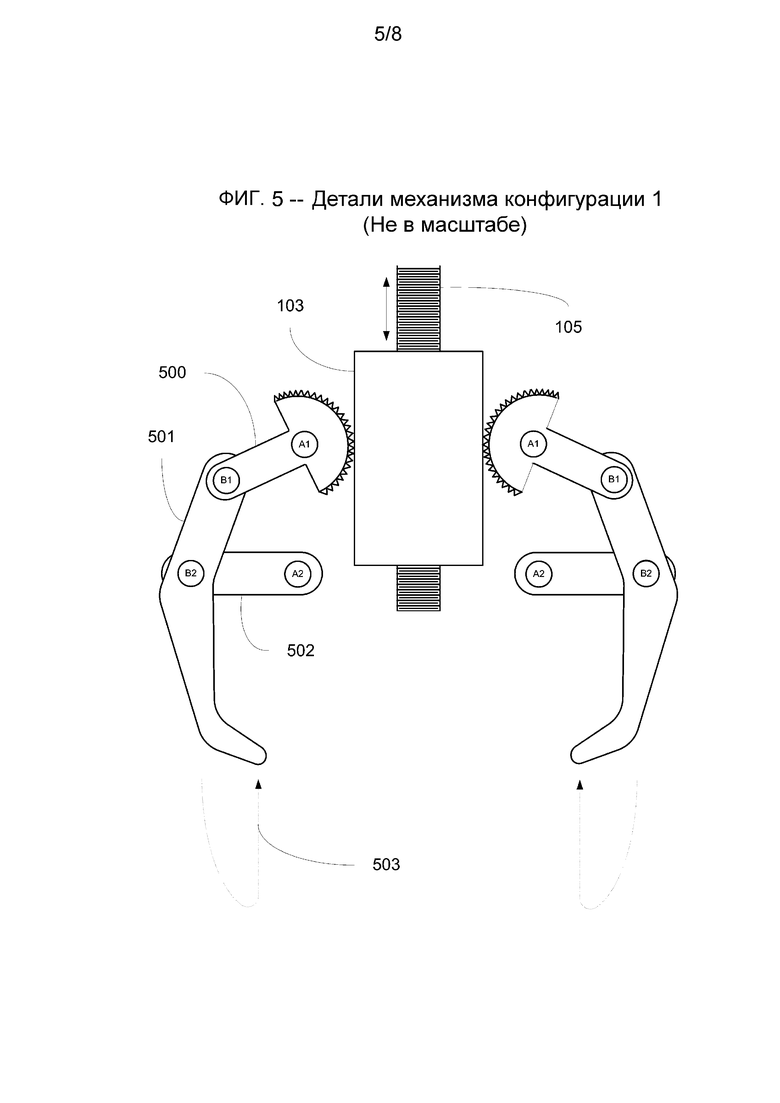
Фиг. 5 является схематическим изображением деталей звеньев конфигурации 1. Ось двигателя конфигурируется как ходовой винт 105, который имеет резьбу для зубчатой гайки 103. Звено секторного привода 500, вращающееся вокруг шарнира, обозначенного узлом A1, соединено с зубчатой гайкой 103 так, чтобы набор зажимов 501 двигался в ответ на вращение ходового винта 105 за счет первичных шарниров у узлов B1 и B2, и вторичных шарниров у узла A2, связанного со звеном руки 502. Движение дистального конца набора зажимов 501 указывается стрелками 503. Шарниры, обозначенные при помощи узлов A1 и A2, вращательно связывают звено с корпусом, и шарниры, обозначенные при помощи узлов B1 и B2, связывают звено со звеном.
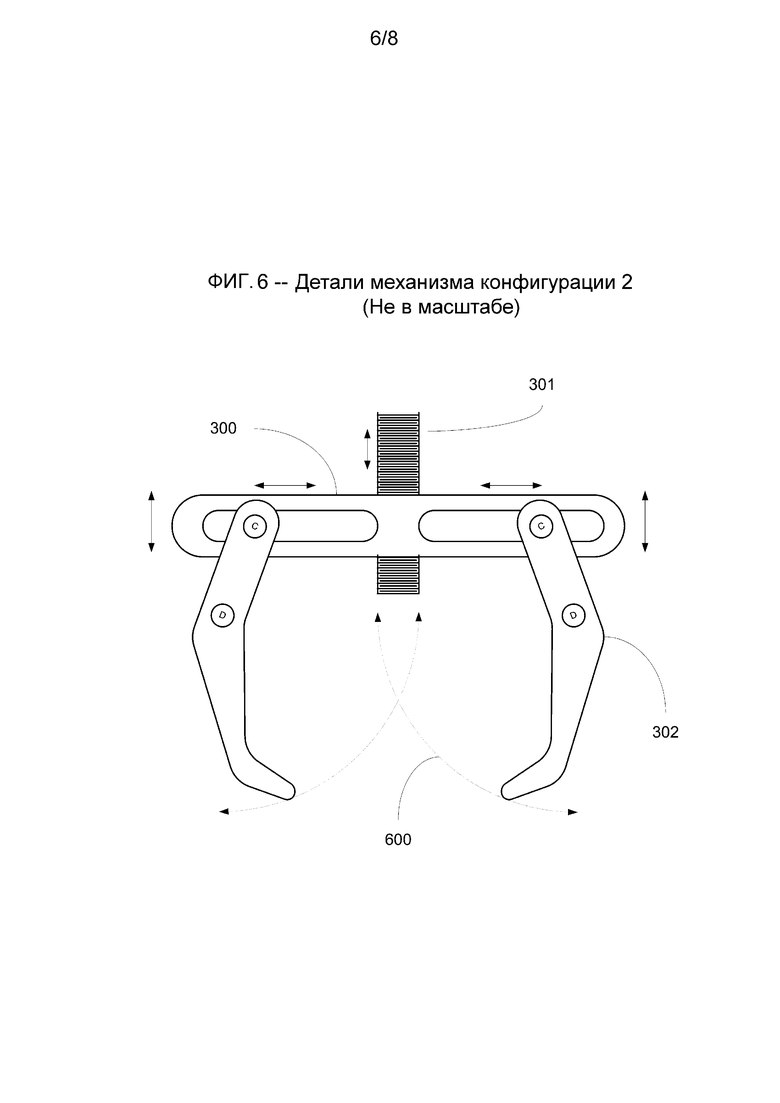
Фиг. 6 является схематическим изображением деталей звеньев конфигурации 2. Ось двигателя конфигурируется как ходовой винт 301, который имеет резьбу для скользящей поперечной перекладины привода 300. Верхний конец набора зажимов 302 вставлен в скользящую поперечную перекладину привода 300 таким образом, чтобы проксимальный конец набора зажимов 302 скользил в горизонтальном направлении влево или вправо по скользящей перекладине 300 в ответ на вращение ходового винта 301. Движение дистального конца набора зажимов 302 является круговым и указывается стрелками 600. Шарниры, обозначенные узлом D, вращательно связывают звено с корпусом, и шарниры, обозначенные узлом C, связывают звено со скользящей поперечной перекладиной (таким образом, чтобы были возможны горизонтальные движения вправо или влево).
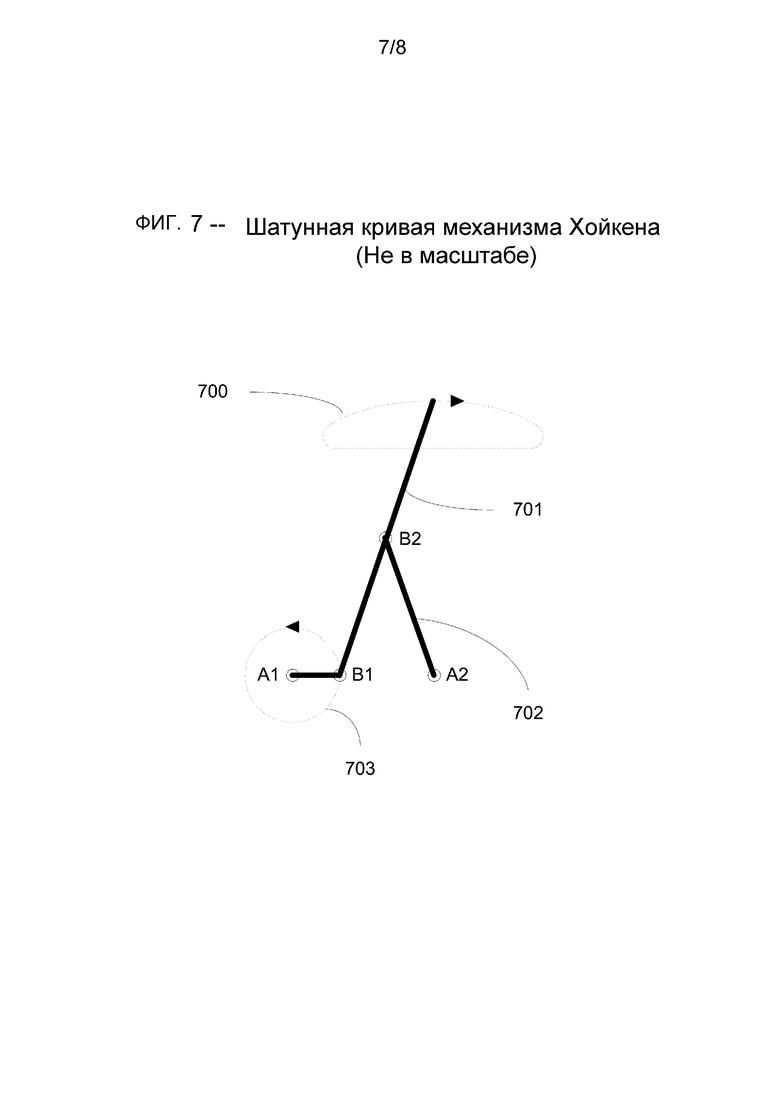
Фиг. 7 является изображением шатунной кривой механизма Хойкена. Движение дистального конца звена руки 701 указывается при помощи пунктирной кривой 700. Проксимальный конец звена руки 701 соединен со звеном секторного привода 703 шарниром, обозначенным узлом B1. Звено секторного привода 703 поворотно присоединено к корпусу 102 шарниром, обозначенным узлом A1. Соединительное звено 702 присоединено к звену руки 701 шарниром, обозначенным узлом B2, и поворотно присоединено к корпусу шарниром, обозначенным узлом A2, который является третьим компонентом механизма Хойкена. Вращение звена секторного привода 703 вызывает движение дистального конца звена руки 701. Шарниры, обозначенные узлами A1 и A2, вращательно связывают звено с корпусом, и шарниры, обозначенные при помощи узлов B1 и B2, связывают звено со звеном.
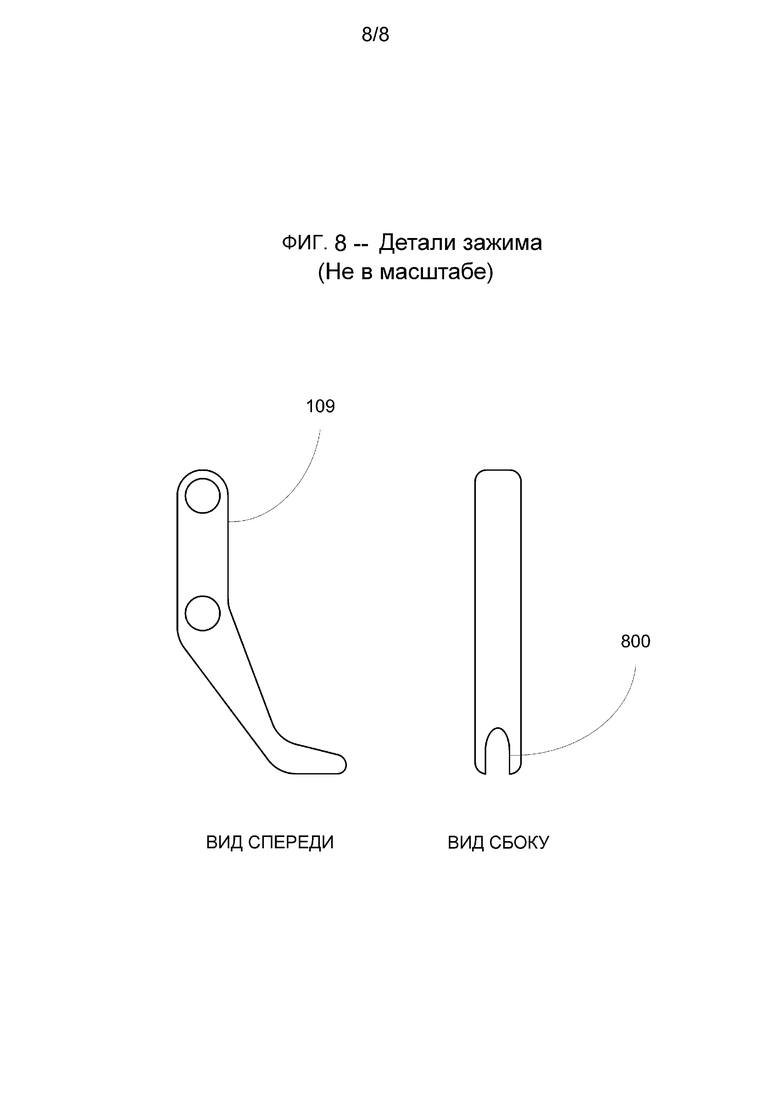
Фиг. 8 является схематическим изображением деталей левого элемента набора зажимов 109, показанных на Фиг. 5 и 6. В виде спереди показаны контуры элемента, а на виде сбоку этого элемента видно сужающуюся выемку 800 на дистальной части набора зажимов 109.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Хотя настоящее изобретение описывается в связи с предыдущими вариантами осуществления описанного ниже и изображенного на фигурах изобретения, настоящее изобретение ограничивается пределами и границами следующей формулы изобретения.
Аппарат и способы, описываемые в настоящем документе, улучшают скорость и безопасность захвата диагностических кассет в диагностических клинических анализаторах для их последующего передвижения или удаления из анализатора. Примеры известных диагностических анализаторов включают такие иммунодиагностические анализаторы, как иммунодиагностический анализатор Vitros® ECi или иммунодиагностический анализатор Vitros® 3600, или клинические химические анализаторы, такие как Vitros® 5,1 FS или Vitros® 5600, поставляемые компанией Ortho-Clinical Diagnostics, Inc. Представительные системы описываются, например, в опубликованной заявке на патент США № 2003/0026733 и заявке на патент США № 11/091283, заполненной 28 марта 2005 года, которые включены в настоящий документ в полном объеме в виде ссылки. Другие примеры включают иммуногематологические анализаторы, используемые для определения группы крови, описанные в патентах США № 5681530 и 5594808, и аппарат для скрининга донорской крови, выпускаемый на рынок под названием Ortho Summit System™ компанией Ortho-Clinical Diagnostics, Inc. В настоящем документе все такие анализаторы имеют общее название “диагностические анализаторы".
Преимущества аппарата могут включать способность к захвату диагностической кассеты при ее небольшом смещении или отклонении от установленного положения, способность к захвату кассеты с приложением минимальной силы к образцам, способность захватывать кассету в условиях минимального пространства, возможность изготовления захватывающего механизма из минимального количества частей с сохранением его высокой надежности, и способность к определению захвата кассеты и подаче сигнала при захвате при помощи необязательных сенсоров обратной связи.
Для более полного понимания предлагаемой технологии описание представлено со ссылками на прилагаемые чертежи. На фигурах для обозначения идентичных элементов используются одинаковые позиции. Для описания предложенной технологии использованы следующие термины.
Термин “корпус” в настоящем документе относится к поддерживающей структуре, каркасу, кожуху, камере или подложке, к которой присоединены различные другие структурных элементы и которая обеспечивает такую степень жесткости, что аппарат для захвата кассет может быть использован и перемещен в виде единого целого.
Термин “звено” в настоящем документе относится к твердому телу, которое содержит по меньшей мере два узла, которые являются точками прикрепления к другим звеньям или к опоре. “Двойное звено” имеет два узла; "тройное звено” имеет три узла, и т.д.
“Узел” в настоящем документе относится к месту на звене, к которому могут быть присоединены другие звенья с образованием шарниров.
В настоящем документе “шарнир” относится к месту соединения между двумя или более звеньями (в их узлах), которое совершает некоторые, или возможные, движения между соединенными звеньями. Шарниры среди других могут иметь вид “поворотного пальца шарнира”, который обеспечивает одну степень свободы при движении, или вид “сдвигающего скользящего шарнира”, который также обеспечивает одну степень свободы при движении (см. книгу Robert L. Norton, Design of Machinery, 3rd edition, McGraw-Hill Book Company, 2003, которая включена в настоящий документ в виде ссылки).
Термин “ходовой винт” в настоящем документе относится к механизму, разработанному для перевода вращательного движения в прямолинейное. Это осуществляется путем вращения резьбовой шпильки, которая была вставлена в гайку таким образом, что резьбовая шпилька поворачивает гайку на определенное линейное расстояние (зависящее от шага резьбы на шпильке).
Термин “зубчатая гайка” в настоящем документе относится к гайке ходового винта с внутренней резьбой, надеваемой на ходовой винт, и которая находится в фиксированном положении, при котором вращение ходового винта приводит к прямолинейному движению зубчатой гайки. Более того, по меньшей мере одна сторона зубчатой гайки имеет зубчатую структуру, которая включает круговую зубчатку или зубчатую передачу, благодаря чему прямолинейное движение зубчатой гайки вызывает поворот этой зубчатки или зубчатой передачи.
Одним из аспектов изобретения является аппарат для захвата изделия в форме кассеты, такой как аппарат для захвата и удержания диагностической кассеты 110 при работе в условиях очень ограниченного пространства. Фиг. 1 и 2 изображают конфигурацию 1 устройства для захвата кассет. Это устройство может быть присоединено к такой системе, как диагностический анализатор, при помощи руки (не показана), присоединенной к податливому блоку 100. Подъем и опускание руки обеспечивает движение устройства для захвата кассет вдоль оси z. Рука также обеспечивает движения в направлении осей x и y для надлежащей установки кассеты 110. Также могут использоваться другие пригодные механизмы, обеспечивающие безопасное соединение устройства с анализатором и его подвижность. При опускании устройство для захвата кассет неидеально совпадает с верхней частью захватываемой кассеты, и податливый блок 100 с пружиной 101 позволяют устройству для захвата кассет отклоняться при небольшом наклоне или немного смещаться при помощи шарнира таким образом, чтобы верх кассеты находился в слабом контакте с обоими фиксирующими штырями 108. Следовательно, механизм может приспосабливаться к смещению, возникающему между кассетой 110 и низом устройства для захвата кассет. Как обозначалось в конфигурации 1, устройство для захвата кассет включает набор зажимов 109, при закрытии которых во время вертикального движения уменьшается зазор между зажимами. Полный профиль движения зависит от механической конфигурации механизма Хойкена 107, который более полно описывается ниже в связи с Фиг. 7. Набор зажимов 109, который работает вышеупомянутым способом, движется вниз и внутрь к захватываемой кассете 110, и обеспечивает при захвате подъем в вертикальном направлении 503. В конечном счете вертикальное движение приводит к безопасному продвижению верхней части диагностической кассеты 110 к фиксирующим штырям 108. Эти фиксирующие штыри 108 могут состоять из податливых материалов, таких как резина или мягкий, гибкий полимер, который деформируется при контакте с диагностической кассетой 110. Деформация фиксирующих штырей 108 приводит к напряжению между диагностической кассетой 110 и зажимом 109, тем самым обеспечивая прочное и надежное сцепление с кассетой 110. Кроме того, коническая выемка 800 вводится в руку набора зажимов 109 для помещения центра кассеты в набор зажимов 109, используемых при дополнительном отклонении. Наличие кассеты 110 в правильном положении обнаруживается при помощи оптического сенсора 111, благодаря чему посылается сигнал захвата для прекращения приложения электродвижущей силы. Кроме того, деформация фиксирующих штырей может вызывать давление, которое может быть приложено к микровыключателю или датчику, подобному тензометрическому датчику, которые позволяют посылать сигнал о том, что диагностическая кассета 110 была захвачена и помещена в правильное положение. Замечено, что использование механизма Хойкена 107 позволяет двигаться набору зажимов 109 в условиях очень малого пространства, но это происходит за счет некоторой механической сложности устройства.
Фиг. 1 является схематическим видом спереди предпочтительного варианта осуществления аппарата для захвата кассет, также известного как устройство для захвата кассет, обозначенного как конфигурация 1. Различные компоненты конфигурации 1 находятся внутри корпуса 102, дополнительно оснащенного податливым блоком 100 и пружиной 101 для устранения небольшого отклонения при позиционировании между фиксирующими штырями 108 и верхним краем кассеты 110 во время опускания устройства для захвата кассет. Серводвигатель 104 имеет ось, сконфигурированную как ходовой винт 105, и присоединен к верхней части корпуса 102. В другом случае ось серводвигателя 104 может быть соединена с отдельным ходовым винтом при помощи некоторых общеизвестных механизмов, включающих вращающуюся муфту. Ходовой винт 105 соединяется с зубчатой гайкой 103, имеющей зубцы на левой и правой стороне. Звенья секторного привода 106 соединены с зубчатой гайкой 103 в конфигурации зубец к зубцу и являются незаменимым компонентом механизма Хойкена 107. При работе приложение электродвижущей силы к серводвигателю 104 вызывает вращение вперед оси, в свою очередь вращающей ходовой винт 105, вызывая прямолинейное движение зубчатой гайки 103 в нисходящем направлении. Это движение зубчатой гайки 103 в нисходящем направлении вызывает вращение звеньев секторного привода 106 против часовой стрелки, что приводит к одновременному движению механизма Хойкена 107 вниз и внутрь последующим движением вверх 503 дистального конца набора зажимов 109. Дистальный конец набора зажимов 109 контактирует с диагностической кассетой 110, центром кассеты в области конической выемки 800, и несколько перемещает ее вверх так, чтобы верхняя часть кассеты прилегала к фиксирующим штырям 108. Наличие кассеты 110 в правильном положении обнаруживается при помощи оптического сенсора 111, благодаря чему посылается сигнал захвата для прекращения приложения электродвижущей силы. В противном случае давление на фиксирующие штыри вызывает выключение микровыключателя или датчика, подобному тензометрическому датчику, или, в еще одном случае, нагрузка превышает определенный порог, достигнутый серводвигателем, и в любом случае посылается сигнал захвата для прекращения приложения электродвижущей силы. В этот момент кассета 110 захватывается и надежно удерживается для последующего перемещения в диагностический клинический анализатор.
ФИГ. 2 изображает конфигурацию 1 в закрытом состоянии с диагностической кассетой 110 в полностью захваченном и удерживаемом положении.
Другим аспектом изобретения является захватывающий аппарат, имеющий минимальное количество частей и поэтому являющийся более дешевым для производства, обладающий высокой надежностью и точностью движений. В соответствии с Фиг. 3 и 4, устройство для захвата кассет, обозначенное при помощи конфигурации 2, включает набор зажимов 302, при закрытии которых уменьшается дистальный зазор между зажимами и в то же время совершается вертикальное движение. Однако, в отличие от механизма Хойкена конфигурации 1, каждая сторона набора зажимов 302 поворотно соединена при помощи шарнира с корпусом 102 в одной точке возле ее средней части. Это обеспечивается только для дистального конца набора зажимов 302, позволяющего зажиму закрываться вовнутрь во время циркулярного движения. Дистальный конец набора зажимов 302, который работает вышеупомянутым способом, движется внутрь к захватываемой кассете 110, центрам кассеты 110 в области конической выемки 800, и обеспечивает подъем в вертикальном направлении. Ограниченное количество частей, составляющих звенья (три), образуют механизм, который имеет большую точность, чем конфигурация 1, в которой ошибки при производстве и установке повышается частота ошибок за счет количества элементов механизма (см. Robert L. Norton, Design of Machinery, 3rd edition, McGraw-Hill Book Company, 2003, которая включается в данный документ в виде ссылки). В конечном итоге силы, приложенные безопасным образом фиксирующими штырями 108, вызывают вертикальные движения вершины диагностической кассеты 110. Аналогичным образом, сходным с таковым для конфигурации 1, находящаяся в правильном положении кассета обнаруживается при помощи оптического сенсора 111, благодаря чему посылается сигнал захвата для прекращения приложения электродвижущей силы. В противном случае давление на фиксирующие штыри вызывает выключение микровыключателя или датчика, подобному тензометрическому датчику, или, в еще одном случае, нагрузка превышает определенный порог, достигнутый серводвигателем, и в любом случае посылается сигнал захвата для прекращения приложения электродвижущей силы. В это время кассета 110 должна захватываться и безопасным образом удерживаться для последующих перемещений при помощи диагностического клинического анализатора.
ФИГ. 3 является схематическим видом спереди предпочтительного варианта осуществления аппарата для захвата кассет, известного как устройство для захвата кассет, обозначенного как конфигурация 2. Различные компоненты конфигурации 2 находятся внутри корпуса 102, дополнительно оснащенного податливым блоком 100 и пружиной 101 для устранения небольшого отклонения при позиционировании между фиксирующими штырями 108 и верхним краем кассеты 110 во время начального движения устройства вниз для захвата кассеты, аналогично таковому для конфигурации 1. Серводвигатель 104 имеет ось, сконфигурированную как ходовой винт 301, и присоединен к верхней части корпуса 102. В другом случае ось серводвигателя 104 может быть соединена с ходовым винтом при помощи нескольких общеизвестных механизмов, включающих вращающуюся муфту, ходовой винт 301 соединяется с приводным звеном 300, которое является проксимальной частью набора зажимов 302, которые за счет шарниров имели конфигурацию, известную как сдвигающий скользящий шарнир, который способен скользить в горизонтальном направлении. Набор зажимов 302 был поворотно присоединен при помощи шарнира к корпусу 102 в области своей средней длины и был способен только к совершению круговых движений. При работе приложение электродвижущей силы к серводвигателю 104 вызывает вращение вперед оси, в свою очередь вращающей ходовой винт 301, вызывая прямолинейное движение приводного звена 103 в восходящем направлении. Благодаря этому проксимальный конец набора зажимов 302 перемещается наружу при помощи сдвигающего скользящего шарнира. Затем дистальный конец набора зажимов 302 может совершать круговые движения наружу. Дистальные концы набора зажимов 302 контактируют с диагностической кассетой 110 и немного перемещают ее вверх так, чтобы верхняя часть кассеты прилегала к фиксирующим штырям 108. Аналогичным образом, сходным с таковым для конфигурации 1, находящаяся в правильном положении кассета 110 обнаруживается при помощи оптического сенсора 111, благодаря чему посылается сигнал захвата для прекращения приложения электродвижущей силы. В противном случае давление на фиксирующие штыри вызывает выключение микровыключателя или датчика, подобному тензометрическому датчику, или, в еще одном случае, нагрузка превышает определенный порог, достигнутый серводвигателем, и в любом случае посылается сигнал захвата для прекращения приложения электродвижущей силы. В это время кассета 110 должна захватываться и безопасным образом удерживаться для последующих перемещений при помощи диагностического клинического анализатора. Необходимо отметить, что использование приводного звена 300, соединенного с набором зажимов 302 и способного только к круговым движениям, требует большего пространства, чем при работе с конфигурацией 1, но приводит к получению более простого механизма, который обладает меньшей стоимостью и большей надежностью.
ФИГ. 4 изображает конфигурацию 2 в закрытом состоянии с диагностической кассетой 110 в полностью захваченном и удерживаемом состоянии.
ФИГ. 5 более подробно изображает конфигурацию 1. Здесь ось сконфигурирована как ходовой винт 105, соединенный с зубчатой гайкой 103 и звеном секторального привода 500, который поворотно соединен с шарниром, образованным узлом A1 и корпусом 102, и зубцами (не показаны) зубчатой гайки 103. Как было отмечено ранее, ось серводвигателя 104 может быть просто соединена с ходовым винтом. В частности, компоненты механизма Хойкена 107 более подробно включают: (1) звено сегментарного привода 500, поворотно соединенного с шарниром, образованным узлом A1 и корпусом 102, (2) руку звена (или половина набора зажимов) 501, имеющую два шарнира, первый из которых образован узлом B1, который соединяет звено сегментарного привода 500 и руку звена 501, и второй шарнир, образованный узлом B2, соединяющим соединительное звено 502 и руку звена 501, и (3) соединительное звено 502, которое имеет два шарнира, первый из которых образован узлом B2, соединяющим руку звена 501 и соединительное звено 502, и второй шарнир, образованный узлом A2, который поворотно соединяет соединительное звено 502 с корпусом 102. Важно отметить, что шарниры компонентов механизма Хойкена 107 бывают двух видов: (1) вид, обозначаемый как A1 или A2, является соединением, где звено поворотно присоединено к корпусу 102 при помощи шарнира, и (2) вид, обозначаемый как B1 или B2, является соединением, где одно звено поворотно присоединено с другим звеном при помощи шарнира. Таким образом, звено секторального привода 500 и соединительное звено 502, которые были поворотно присоединены к корпусу 102 при помощи шарнира, могут вращаться только совершая круговые движения вокруг точки, к которой они были присоединены. Несмотря на это, рука звена 501 может свободно двигаться так, что дистальный конец руки звена 501 (или, в другом случае, дистальный конец одного компонента набора зажимов 501) совершает движения по кривой Хойкена 503.
ФИГ. 6 более подробно изображает конфигурацию 2. Здесь серводвигатель сконфигурирован как ходовой винт 301, соединенный с приводным звеном 300. Как было отмечено ранее, ось серводвигателя 104 может быть просто соединена с ходовым винтом. В частности, необходимо отметить, что механизм состоит только из трех механических частей. Проксимальный конец руки звена 302 (или половина набора зажимов) соединяется с приводным звеном 300 при помощи смещающего скользящего шарнира, образованного узлом С, и рукой звена 302, которая поворотно соединяется с корпусом 102 при помощи шарнира, образованного узлом D. Более того, важно отметить, что вышеупомянутые шарниры бывают двух видов: вид (1), обозначенный как D, который имеет звено, поворотно соединенное с корпусом 102 при помощи шарнира, и вид (2), обозначенный как C, который имеет одно звено, поворотно соединенное с другим звеном так, что это соединение может свободно скользить в одном направлении. Таким образом, рука звена 302 может вращаться только вокруг шарнира, образованного узлом D, в ответ на движение приводного звена 300 вверх или вниз, в то время как смещаемый скользящий шарнир, образованный узлом C и рукой звена 302, позволяет совершать скользящие одномерные движения в горизонтальном направлении.
ФИГ. 7 схематически изображает шатунную кривую механизма Хойкена. Кривая Хойкена 700 проводится от дистального конца руки звена 701 (или, в другом варианте настоящего изобретения, от дистального конца одного из компонентов зажима) вращением звена секторного привода 703, соединенного с рукой звена 701 и соединительным звеном 702. Соединения между звеньями могут быть двух видов; вид A1 или A2 является соединением, где звеньевой компонент поворотно присоединен к корпусу 102 при помощи шарнира, вид B1 или B2 является соединением, где одно звено соединено с другим звеном. Необходимо заметить, что в настоящем изобретении используется только наиболее левая часть кривой Хойкена.
ФИГ. 8 подробно изображает один компонент набора зажимов 109. Необходимо отметить, что на виде сбоку выемка 800 располагается на дистальном конце зажима. Эта выемка 800 аккуратно сужается так, что при закрытии набора зажимов 109 выемка 800, которая больше толщины стенки кассеты 110, при удерживании имеет тенденцию к смещению в центральное положение кассеты.
В особенно предпочтительном варианте осуществления настоящего изобретения аппарат, соответствующий настоящему изобретению, особенно подходит для систем, качественно и количественно определяющих агглютинаты, возникающие в ответ на иммунологическую реакцию агглютинации, т.е. для иммуногематологических анализаторов. В таких системах в маленькой колонке, относящейся к микроколонкам, содержатся микрочастицы геля или стеклянных бус. Реагент, такой как анти-IgG, распределяется в разбавителе в микроколонке, и исследуемый образец красной крови помещается в реакционную камеру над колонкой. Колонка, которая обычно является одной из множества колонок, образующих прозрачную кассету, затем центрифугируется. В соответствии с настоящим изобретением кассета удерживается при помощи устройства для захвата кассет. Такие системы описаны в патентах США № 5681530, 5905808 и 5911000, каждый из которых включен в настоящий документ во всей своей полноте в виде ссылки. Обычная кассета, используемая в методе колоночной агглютинации (МКА), приведенная в патенте 5780248, была описана выше.
В таких системах кассета 110, хранившаяся в устройстве для хранения, помещается в условия для заполнения ниже отверстия устройства. Устройство для захвата кассет, соединенное с подвижной рукой, движется в направлении устройства для хранения до тех пор, пока оно не зафиксируется на кассете 110, которая должна быть забрана из устройства для хранения. После этого устройство для захвата кассет контактирует с кассетой описанным выше способом, в котором кассета затем захватывается зажимами 109 устройства для захвата кассет. После этого кассета 110 поднимается наружу из устройства для хранения и может быть пропущена через смежное устройство для считывания штрихового кода, который позволяет получить информацию о правильной ориентации кассеты, о том, что желаемая кассета была убрана из устройства для хранения, что у кассеты не истек срок годности, и различную информацию, такую как порядковый номер кассеты и номер серии кассет, и вся эта информация может быть перенесена в память компьютера и там сохранена.
Устройство для захвата кассет переносит кассету 110 в инкубатор. В это время пробойник пробивает одно или более отверстие в мембране, которая покрывает кассету. Затем кровь и реагенты могут быть распределены в кассете 110, которая может быть инкубирована.
Затем устройство для захвата кассет перемещает кассету в центрифугу, которая вращается; например, первоначально в течение 2 минут при 55g и в течение 3 минут при 199g, тем самым обеспечивая пригодное смешивание образца крови и реагента в каждой из соответствующих лунок. После завершения процесса центрифугирования устройство для захвата забирает центрифугированную кассету и переносит ее к считывающему устройству. После завершения считывания кассета удаляется.
Вышесказанное адаптировано для компьютерных программ, контролируемых при помощи компьютера, которые хорошо известны специалистам в данной области техники.
Для специалистов в данной области техники очевидно, что в способы и процессы по настоящему изобретению могут быть внесены различные изменения и дополнения. Таким образом, настоящее изобретение охватывает указанные изменения и дополнения при условии, что они находятся в пределах объема прилагаемой формулы изобретения и ее эквивалентов.
Содержание всех документов, указанных выше, полностью включено в настоящее описание посредством ссылки в такой же степени, в которой эти документы были бы включены в настоящее описание при индивидуальной ссылке на каждый документ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ ФИКСИРУЮЩИЙ И ОТРЕЗНОЙ АППАРАТ С ОДНИМ ТРОСОВЫМ ПРИВОДОМ | 2007 |
|
RU2445930C2 |
| ОДНОРАЗОВЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2492818C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ПРИВОД И ПУСКОВОЙ ПРИВОД, РАБОТАЮЩИЕ ОТ ОДНОГО ПОВОРАЧИВАЕМОГО ВЫХОДА | 2014 |
|
RU2650585C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| РАБОЧИЕ ОРГАНЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2497464C2 |
| СОЕДИНИТЕЛЬНЫЕ УСТРОЙСТВА РАБОЧЕГО ОРГАНА ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СШИВАЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2489975C2 |
| КОМПОНОВКА ДАТЧИКА ДЛЯ СИСТЕМЫ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2684021C2 |
| УЗЛЫ ПОВОРОТНЫХ ПРИВОДНЫХ СТЕРЖНЕЙ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ШАРНИРНО ПОВОРАЧИВАЕМЫМИ КОНЦЕВЫМИ ЭФФЕКТОРАМИ | 2013 |
|
RU2639998C2 |
| КОНФИГУРАЦИИ БЛОКИРОВКИ ПУСКОВОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2645408C2 |
| ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПИТАНИЕМ | 2014 |
|
RU2677531C2 |
Изобретение в целом относится к аппарату для захвата изделий в форме кассеты, в частности для захвата, удерживания и обеспечения движения реагента или кассеты образца как части автоматического диагностического анализатора. Заявленная группа содержит аппараты для захвата изделий в форме кассеты и способы захвата изделий в форме кассеты. При этом аппарат для захвата изделий в форме кассеты содержит корпус опоры, линейный исполнительный механизм, подвижный вдоль оси x относительно опоры, набор зажимов для захвата изделий в форме кассеты, причем каждый зажим имеет проксимальный и дистальный концы и дистальный конец приспособлен для захвата изделий в форме кассеты, подвижный узел, расположенный на проксимальном конце каждого зажима для его соединения с линейным исполнительным механизмом, фиксированный узел относительно опоры, расположенный между проксимальным и дистальным концами каждого зажима для соединения каждого зажима с опорой, где фиксированный узел опосредованно расположен на зажимах и соединен с ними при помощи сцепления и подвижного узла на зажимах и где движение линейного исполнительного механизма обеспечивает движение подвижного узла по осям x и y, тем самым поворачивая зажимы вокруг фиксированного узла, что приводит к раскрытию и закрытию зажимов. Технический результат заключается в создании аппарата, способного действовать в ограниченном пространстве, имеющего минимальное количество частей, способного к захвату кассет с образцами со значительным смещением и придающего движение аппарату, в частности способствующего захвату и удерживанию контейнеров с образцами, которые не имеют форму пробирки. 5 н. и 6 з.п. ф-лы, 8 ил.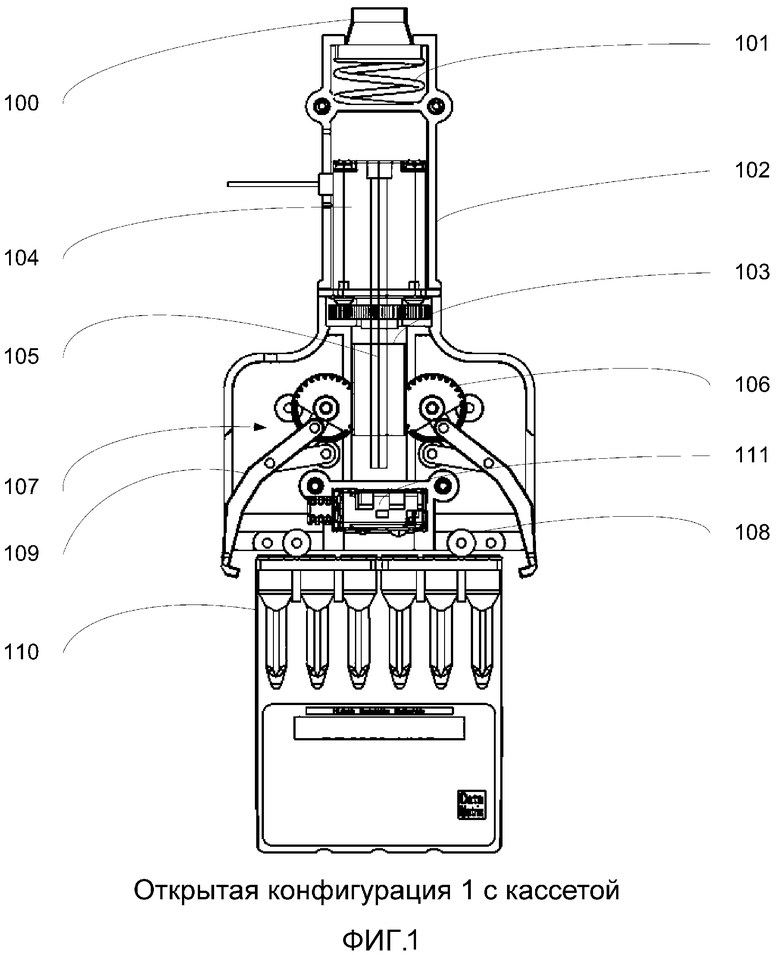
1. Аппарат для захвата изделий в форме кассеты, содержащий:
корпус опоры;
линейный исполнительный механизм, подвижный вдоль оси x относительно опоры;
набор зажимов для захвата изделий в форме кассеты, причем каждый зажим имеет проксимальный и дистальный конец, и дистальный конец приспособлен для захвата изделий в форме кассеты;
подвижный узел, расположенный на проксимальном конце каждого зажима для его соединения с линейным исполнительным механизмом;
фиксированный узел относительно опоры, расположенный между проксимальным и дистальным концами каждого зажима для соединения каждого зажима с опорой, где фиксированный узел опосредованно расположен на зажимах и соединен с ними при помощи сцепления и подвижного узла на зажимах; и где движение линейного исполнительного механизма обеспечивает движение подвижного узла по осям x и y, тем самым поворачивая зажимы вокруг фиксированного узла, что приводит к раскрытию и закрытию зажимов.
2. Аппарат по п. 1, дополнительно содержащий: секторный привод сцепления, имеющий сторону с зубцами, и сцепление, выходящее за пределы стороны с зубцами, причем конец сцепления, противоположный секторному приводу сцепления, соединен с подвижным узлом; и зубчатую рейку на линейном исполнительном механизме, где зубцы секторного привода сцепления и зубцы зубчатой рейки зацепляются, и движение зубчатой рейки вращает секторный привод сцепления, тем самым вызывая движение сцепления, которое вызывает движение зажимов через подвижный узел.
3. Аппарат по п. 1, где линейный исполнительный механизм содержит двигатель и вращающийся ходовой винт, приводимый в движение указанным двигателем.
4. Аппарат по п. 1, дополнительно содержащий:
набор фиксирующих штырей,
податливый блок и
пружину,
где захват кассеты направляется при помощи фиксирующих штырей, и движение изделия в форме кассеты направляется податливым блоком и пружиной, которые допускают возможное смещение аппарата относительно изделия в форме кассеты.
5. Аппарат по п. 4, где набор фиксирующих штырей присоединен к низу корпуса возле дистального конца каждого зажима, которые расположены таким образом, чтобы они могли примыкать к изделию в форме кассеты после того, как изделие в форме кассеты было захвачено, где податливый блок расположен у верхнего конца корпуса, а пружина находится под податливым блоком, позволяя корпусу отклоняться.
6. Аппарат для захвата изделий в форме кассеты, содержащий:
корпус опоры;
линейный исполнительный механизм, подвижный вдоль оси x относительно опоры;
набор зажимов для захвата изделия в форме кассеты, где каждый зажим имеет проксимальный и дистальный концы и дистальный конец приспособлен для захвата изделия в форме кассеты;
подвижный узел, расположенный на проксимальном конце каждого зажима, соединяющий каждый зажим с линейным исполнительным механизмом;
фиксированный узел относительно опоры, расположенный между проксимальным и дистальным концами каждого зажима для соединения каждого зажима с опорой, где фиксированный узел расположен непосредственно на зажиме;
привод сцепления, соединенный с линейным исполнительным механизмом в его центре, причем привод сцепления имеет удлиненные пазы на каждой стороне центра, при этом подвижные узлы с возможностью скольжения входят в зацепление в эти пазы, после чего движение линейного исполнительного механизма перемещает привод сцепления, что вызывает линейное движение подвижного узла в направлении, перпендикулярном направлению скольжения, тем самым вращая зажимы вокруг фиксированного узла и приводя к раскрытию и закрытию зажимов;
набор фиксирующих штырей, присоединенных к низу корпуса возле дистального конца каждого зажима, которые расположены таким образом, чтобы они могли примыкать к изделию в форме кассеты после того, как это изделие в форме кассеты было захвачено,
податливый блок, расположенный у верхнего конца корпуса; и
пружину, расположенную под податливым блоком, которая позволяет корпусу слегка наклоняться, причем захват кассеты направляется при помощи фиксирующих штырей и движение изделия в форме кассеты направляется податливым блоком и пружиной, допуская возможное смещение аппарата относительно изделия в форме кассеты.
7. Аппарат для захвата изделий в форме кассеты, содержащий:
корпус,
серводвигатель,
вращающийся ходовой винт, приводимый в движение упомянутым двигателем,
зубчатую гайку,
секторный привод сцепления и
набор зажимов,
где электродвижущая сила, приложенная к серводвигателю, вызывает вращение ходового винта в первом направлении, которое вызывает линейное движение зубчатой гайки в первом направлении, приводящее к вращению секторного привода сцепления в противоположном направлении, что приводит к внутреннему вращению набора зажимов до заданной точки, что обеспечивает захват диагностической кассеты зажимами,
при этом после захвата кассеты набор зажимов втягивается вверх в корпус.
8. Способ захвата изделий в форме кассеты, включающий:
обеспечение корпуса опоры;
обеспечение линейного исполнительного механизма, подвижного вдоль оси x относительно опоры;
обеспечение набора зажимов для захвата изделия в форме кассеты, где каждый зажим имеет проксимальный и дистальный концы и дистальный конец приспособлен для захвата изделия в форме кассеты;
обеспечение подвижного узла, расположенного на проксимальном конце каждого зажима, соединяющего каждый зажим с линейным исполнительным механизмом;
обеспечение фиксированного узла относительно опоры, расположенного между проксимальным и дистальным концами каждого зажима для соединения каждого зажима с опорой, где фиксированный узел опосредованно расположен на зажимах и соединен с ними при помощи сцепления и подвижного узла на зажимах;
позиционирование корпуса таким образом, чтобы он располагался над захватываемым изделием в форме кассеты;
перемещение линейного исполнительного механизма, который обеспечивает движение подвижного узла по осям x и y, тем самым поворачивая зажимы относительно фиксированного узла, что приводит к закрытию зажимов и захвату изделия в форме кассеты.
9. Способ по п. 8, дополнительно содержащий: секторный привод сцепления, имеющий сторону с зубцами, и сцепление, выходящее за пределы стороны с зубцами, причем конец сцепления, противоположный секторному приводу сцепления, соединен с подвижным узлом; и зубчатую рейку на линейном исполнительном механизме, где зубцы секторного привода сцепления и зубцы зубчатой рейки зацепляются и движение зубчатой рейки вращает секторный привод сцепления, тем самым вызывая движение сцепления, которое вызывает движение зажимов через подвижный узел.
10. Способ по п. 9, дополнительно включающий:
обеспечение набора фиксирующих штырей, присоединенных к низу корпуса возле дистального конца каждого зажима, которые располагают таким образом, чтобы они могли примыкать к изделию в форме кассеты после того, как это изделие в форме кассеты было захвачено,
обеспечение податливого блока, расположенного у верхнего конца корпуса, и пружины, находящейся под податливым блоком, что позволяет корпусу немного отклоняться,
где захват кассеты направляется при помощи фиксирующих штырей и движение изделия в форме кассеты направляется податливым блоком и пружиной, которые допускают возможное смещение аппарата относительно изделия в форме кассеты.
11. Способ захвата изделий в форме кассеты, включающий:
обеспечение корпуса опоры;
обеспечение линейного исполнительного механизма, подвижного вдоль оси x относительно опоры;
обеспечение набора зажимов для захвата изделия в форме кассеты, где каждый зажим имеет проксимальный и дистальный концы и дистальный конец приспособлен для захвата изделия в форме кассеты;
обеспечение подвижного узла, расположенного на проксимальном конце каждого зажима, соединяющего каждый зажим с линейным исполнительным механизмом;
обеспечение фиксированного узла относительно опоры, расположенного между проксимальным и дистальным концами каждого зажима для его соединения с опорой, где фиксированный узел расположен непосредственно на зажиме;
обеспечение привода сцепления, соединенного с линейным исполнительным механизмом в его центре, где привод сцепления имеет удлиненные пазы на каждой стороне центра, при этом подвижные узлы с возможностью скольжения входят в зацепление в эти пазы,
обеспечение набора фиксирующих штырей, присоединенных к низу корпуса возле дистального конца каждого зажима, которые располагают таким образом, чтобы они могли примыкать к изделию в форме кассеты после захвата этого изделия,
обеспечение податливого блока у верхнего конца корпуса и пружины под податливым блоком, который позволяет корпусу отклоняться,
позиционирование корпуса таким образом, чтобы он располагался над захватываемым изделием в форме кассеты;
движение линейного исполнительного механизма, которое приводит к движению привода сцепления, что вызывает линейное движение подвижного узла в направлении, перпендикулярном направлению скольжения, тем самым вращая зажимы вокруг фиксированного узла и приводя к закрытию зажима и захвату изделия в форме кассеты; где захват кассеты направляется при помощи фиксирующих штырей и движение изделия в форме кассеты направляется при помощи податливого блока и пружины, которые допускают возможное смещение аппарата относительно изделия в форме кассеты.
| US 3202449 A, 24.08.1965 | |||
| US 4002247 A, 11.01.1977 | |||
| US 4411576 A, 25.10.1983 | |||
| Кассетная форма | 1984 |
|
SU1172725A1 |

