Изобретение относится в целом к управляющему устройству для управления фазовым положением первого кулачкового распределительного вала двигателя внутреннего сгорания, к транспортному средству с таким управляющим устройством и к способу управления фазовым положением первого кулачкового распределительного вала двигателя внутреннего сгорания.
Характеристики реакции двигателя внутреннего сгорания на требование изменения мощности двигателя или крутящего момента могут быть улучшены с помощью динамического управления фазовым положением кулачкового распределительного вала. В то время как спортивно ориентированные пользователи транспортного средства ценят возможно высокую динамику срабатывания приводного агрегата их транспортного средства, могут иметься также важные причины не всегда полностью исчерпывать максимально возможные характеристики срабатывания приводного агрегата. Для сознательного дросселирования максимально возможной динамики срабатывания приводного агрегата транспортного средства могут иметься, среди прочего, следующие причины. Например, для определенных пользователей транспортного средства или для определенных пользователей транспортного средства при определенных погодных условиях желателен осторожный тип вождения. Также дросселирование динамики срабатывания приводного агрегата может способствовать экономии ресурсов вследствие уменьшенного расхода топлива на пройденный километр, меньшего выброса вредных веществ и меньшего износа частей транспортного средства. Кроме того, возможно, что на основании предписаний закона или на основании концепции политики сбыта транспортного средства особенно высокая динамика срабатывания приводного агрегата должна предназначаться для определенных пользователей транспортного средства и/или для определенных конфигураций транспортного средства. Следовательно, существует потребность в техническом решении, с помощью которого обеспечивается надежная возможность конфигурирования и установки динамики срабатывания двигателя внутреннего сгорания.
В DE 10 2011 088 403 В3 приведено описание определения значения хода клапана отдельного цилиндра двигателя внутреннего сгорания с несколькими цилиндрами.
В DE 10 2004 039 216 А1 приведено описание способа управления двигателем внутреннего сгорания с кулачковым распределительным валом, который оказывает воздействие на клапаны газораспределения. Для управления исполнительным элементом устройства регулирования фазы определяется значение коррекции для фазы между распределительным валом и коленчатым валом с помощью итеративного цифрового способа оптимизации с использованием наборов измерительных данных. В каждом наборе данных предусмотрено, среди прочего, также поле значений для скорости вращения и давления во впускном газопроводе. Способ оптимизации связан с большим объемом вычислений и сложен в выполнении, так что регулирование динамики срабатывания двигателя внутреннего сгорания затруднено.
Поэтому задачей данного изобретения является создание управляющего устройства, транспортного средства и/или способа управления фазовым положением кулачкового распределительного вала, с помощью которых по меньшей мере частично преодолеваются указанные выше недостатки.
Эта задача решена с помощью управляющего устройства, согласно пункту 1 формулы изобретения, транспортного средства, согласно пункту 11 формулы изобретения, и способа управления фазовым положением кулачкового распределительного вала, согласно пункту 12 формулы изобретения.
Другие предпочтительные варианты выполнения изобретения следуют из зависимых пунктов формулы изобретения и приведенного ниже описания предпочтительных вариантов выполнения данного изобретения.
Управляющее устройство, согласно изобретению, для управления фазовым положением кулачкового распределительного вала двигателя внутреннего сгорания имеет первый датчик параметрической поверхности для определения динамического заданного фазового положения первого кулачкового распределительного вала и второй датчик параметрической поверхности для определения статического заданного фазового положения первого кулачкового распределительного вала. Кроме того, управляющее устройство имеет первый интерполятор для определения исправленного заданного фазового положения первого кулачкового распределительного вала на основании определяемого первым датчиком параметрической поверхности динамического заданного фазового положения первого кулачкового распределительного вала и определяемого вторым датчиком параметрической поверхности статического заданного фазового положения первого кулачкового распределительного вала.
Первый кулачковый распределительный вал может быть впускным кулачковым распределительным валом для приведения в действие впускных клапанов или выпускным кулачковым распределительным валом для приведения в действие выпускных клапанов или общим кулачковым распределительным валом для одновременного приведения в действие впускных и выпускных клапанов двигателя внутреннего сгорания. Обычно двигатель внутреннего сгорания является приводным агрегатом транспортного средства. Транспортное средство может быть наземным транспортным средством, водным транспортным средством или воздушным транспортным средством. Наземное транспортное средство может быть, например, легковым автомобилем, грузовым автомобилем или автобусом. Двигатель внутреннего сгорания может быть бензиновым двигателем или дизельным двигателем. Он может иметь турбонаддув, любое количество цилиндров, например, три, четыре, пять, шесть, восемь или 12 и т.д. Фазовое положение кулачкового распределительного вала является регулируемым, как известно, с целью изменения фазы газораспределения двигателя внутреннего сгорания, что также известно из уровня техники.
Двигатель внутреннего сгорания имеет соответственно изменяемое управление клапанами, которые управляются через фазовое положение кулачкового распределительного вала.
Датчиком параметрической поверхности называется здесь электронная (гидравлическая, пневматическая или механическая) схема, которая предназначена для приема по меньшей мере двух входных величин (например, информации о крутящем моменте и информации о давлении во впускном газопроводе) и выдачи для фактически введенной комбинации входных величин (т.е. для векторов по меньшей мере с двумя входными величинами) соответствующего выходного значения в соответствии с параметрической поверхностью датчика параметрической поверхности. Для ввода входных величин и выдачи выходных величин датчик параметрической поверхности может иметь соответствующие цифровые (и/или аналоговые) входные и выходные интерфейсы.
Управляющее устройство может иметь одни или несколько процессоров или т.п., которые выполняют указанные здесь функции.
Концепцию изобретения можно усматривать в том, что осуществляется интерполяция между динамическим заданным фазовым положением первого кулачкового распределительного вала и статическим заданным фазовым положением первого кулачкового распределительного вала.
Динамическое заданное фазовое положение первого кулачкового распределительного вала определяется через первую параметрическую поверхность, которая оптимизирована относительно характеристики срабатывания двигателя внутреннего сгорания, т.е. относительно отдачи максимального крутящего момента, из-за чего также здесь применяется понятие «динамическое». Таким образом, при динамическом заданном фазовом положении первого кулачкового распределительного вала управление впускными и/или выпускными клапанами двигателя внутреннего сгорания осуществляется так, что двигатель внутреннего сгорания обеспечивает максимальный крутящий момент.
Статическое заданное фазовое положение первого кулачкового распределительного вала определяется из второй параметрической поверхности, которая оптимизирована относительно оптимального коэффициента полезного действия двигателя внутреннего сгорания. Таким образом, при статическом заданном фазовом положении первого кулачкового распределительного вала управление впускными и/или выпускными клапанами двигателя внутреннего сгорания осуществляется так, что двигатель внутреннего сгорания работает с высоким, в частности максимальным, коэффициентом полезного действия.
Под максимальным крутящим моментом следует понимать здесь не исключительно теоретически возможный максимальный крутящий момент, а крутящий момент, который достигается с помощью первой (динамической, оптимизированной относительно крутящего момента) параметрической поверхности и который обычно выше крутящего момента, который обеспечивает двигатель внутреннего сгорания, который работает со второй (статической, оптимизированной относительно расхода топлива) параметрической поверхностью.
За счет интерполяции между динамическим и статическим заданным фазовым положением можно сдвигать фазовое положение кулачкового распределительного вала от статического заданного фазового положения в направлении динамического заданного фазового положения, когда, например, распознается, что транспортное средство должно ускоряться, и поэтому двигатель внутреннего сгорания должен обеспечивать соответствующий крутящий момент.
Определение исправленного заданного фазового положения, которое учитывает, например, желаемое ускорение и связанный с этим требуемый крутящий момент, осуществляется посредством интерполяции между статическим и динамическим заданным фазовым положением первого кулачкового распределительного вала.
В некоторых вариантах выполнения интерполяция может происходить посредством определения среднего значения между статическим и динамическим заданным фазовым положением первого кулачкового распределительного вала, что осуществляется очень просто.
Однако интерполяция может выполняться также на основе интерполяционного фактора. В соответствии с этим, в некоторых примерах выполнения первый интерполятор предназначен для определения исправленного заданного фазового положения первого кулачкового распределительного вала на основании интерполяционного фактора, при этом интерполяционный фактор не должен быть неизменным, а может изменяться и лежать, например, между 0 и 1. С помощью изменяемого интерполяционного фактора может достигаться динамика срабатывания приводного агрегата, который имеет двигатель внутреннего сгорания с первым кулачковым распределительным валом, в зависимости от определенных рабочих параметров, например, в зависимости от отклонения заполнения цилиндра двигателя внутреннего сгорания и/или скорости вращения двигателя внутреннего сгорания (называемой в последующем также скоростью вращения двигателя).
В некоторых вариантах выполнения интерполяционный фактор определяется также на основе желаемого заданного крутящего момента двигателя внутреннего сгорания. Для этого определяется фактический крутящий момент двигателя внутреннего сгорания и определяется интерполяционный фактор так, что за счет изменения управления первым кулачковым распределительным валом достигается заданный крутящий момент. При этом интерполяционный фактор может лежать между 0 и 1, при этом 1 указывает наибольшую разницу между фактическим крутящим моментом и заданным крутящим моментом. Как только достигается заданный крутящий момент, то фазовое положение первого кулачкового распределительного вала может снова управляться на основе стационарной параметрической поверхности.
В некоторых вариантах выполнения управляющее устройство имеет третий датчик параметрической поверхности для определения интерполяционного фактора с учетом скорости вращения двигателя и отклонения заполнения цилиндра, при этом датчик параметрической поверхности определяет интерполяционный фактор из третьей параметрической поверхности. За счет этого можно устанавливать или оказывать влияние на характеристики ускорения или изменения скорости вращения двигателя внутреннего сгорания. Отклонение заполнения может принимать как положительные, так и отрицательные значения.
В некоторых вариантах выполнения управляющее устройство имеет дополнительно следующие компоненты: четвертый датчик параметрической поверхности для определения динамического заданного фазового положения второго кулачкового распределительного вала (например, выпускного кулачкового распределительного вала, когда первый кулачковый распределительный вал является впускным кулачковым распределительным валом) двигателя внутреннего сгорания, и второй интерполятор для определения исправленного заданного фазового положения второго кулачкового распределительного вала с учетом определяемого с помощью четвертого датчика параметрической поверхности динамического заданного фазового положения второго кулачкового распределительного вала и определяемого с помощью пятого датчика параметрической поверхности статического заданного фазового положения второго кулачкового распределительного вала.
За счет этого можно также для второго кулачкового распределительного вала определять зависимое от рабочего состояния двигателя внутреннего сгорания оптимальное заданное фазовое положение второго кулачкового распределительного вала. Когда первый кулачковый распределительный вал является впускным кулачковым распределительным валом для приведения в действие впускных клапанов, то второй кулачковый распределительный вал может быть, например, выпускным кулачковым распределительным валом для приведения в действие выпускных клапанов двигателя внутреннего сгорания или общим кулачковым распределительным валом для одновременного приведения в действие впускных и выпускных клапанов. Когда первый кулачковый распределительный вал является выпускным кулачковым распределительным валом для приведения в действие выпускных клапанов, то второй кулачковый распределительный вал может быть, например, впускным кулачковым распределительным валом для приведения в действие впускных клапанов двигателя внутреннего сгорания или общим кулачковым распределительным валом для одновременного приведения в действие впускных и выпускных клапанов двигателя внутреннего сгорания.
В некоторых вариантах выполнения управляющее устройство имеет дополнительно следующие компоненты: шестой датчик параметрической поверхности для определения динамического заданного угла зажигания двигателя внутреннего сгорания и третий интерполятор для определения исправленного заданного угла зажигания с учетом определяемого с помощью шестого датчика параметрической поверхности динамического заданного угла зажигания и определяемого с помощью седьмого датчика параметрической поверхности статического заданного угла зажигания двигателя внутреннего сгорания. За счет этого можно также определять зависимый от рабочего состояния двигателя внутреннего сгорания оптимальный динамический заданный угол зажигания.
В некоторых вариантах выполнения второй интерполятор предназначен для учета интерполяционного фактора при определении исправленного заданного фазового положения второго кулачкового распределительного вала. Независимо от этого может быть целесообразным, когда третий интерполятор предназначен для учета интерполяционного фактора при определении исправленного заданного угла зажигания. Каждая из обеих указанных выше мер пригодна для регулирования или для оказания влияния на динамику срабатывания двигателя внутреннего сгорания, например, также в зависимости от требуемого крутящего момента.
В некоторых вариантах выполнения первый, и/или второй, и/или четвертый, и/или пятый, и/или шестой, и/или седьмой датчик параметрической поверхности предназначен для определения обеспечиваемого им выдаваемого значения с учетом скорости вращения двигателя и давления впускного газопровода. Пары значений скорости вращения двигателя и давления впускного газопровода пригодны для различения друг от друга рабочих состояний двигателя внутреннего сгорания и зависящих от этого различия оптимальных статических и динамических заданных фазовых положений кулачковых распределительных валов и зависящего от этого отличия оптимального статического и динамического заданного угла зажигания.
В некоторых вариантах выполнения управляющее устройство предназначено для выбора интерполяционного фактора и/или первой параметрической поверхности первого датчика параметрической поверхности, и/или второй параметрической поверхности второго датчика параметрической поверхности, и/или третьей параметрической поверхности третьего датчика параметрической поверхности, и/или четвертой параметрической поверхности четвертого датчика параметрической поверхности, и/или пятой параметрической поверхности пятого датчика параметрической поверхности, и/или шестой параметрической поверхности шестого датчика параметрической поверхности, и/или седьмой параметрической поверхности седьмого датчика параметрической поверхности в зависимости от зависящих от типа двигателя или от типа транспортного средства параметров. За счет этого управление можно осуществлять так, что оно пригодно для применения для различных типов двигателей внутреннего сгорания и в различных типах транспортных средств или конфигурациях транспортных средств. Зависящий от типа двигателя параметр может быть, например, характерным для одного типа двигателя внутреннего сгорания, который задается, например, с помощью рабочего объема, вида или количества впускных, соответственно, выпускных клапанов, наличия турбонаддува и т.д. Аналогичное справедливо для зависящего от типа транспортного средства параметра, который является характерным для соответствующих технических данных, которые являются релевантными для управления двигателем внутреннего сгорания.
Способ, согласно изобретению, управления фазовым положением первого кулачкового распределительного вала двигателя внутреннего сгорания содержит следующие стадии: определения динамического заданного фазового положения первого кулачкового распределительного вала, например, с помощью первого датчика параметрической поверхности, определения статического заданного фазового положения первого кулачкового распределительного вала, например, с помощью второго датчика параметрической поверхности, и определения исправленного заданного фазового положения первого кулачкового распределительного вала с помощью интерполяции между определяемым динамическим заданным фазовым положением первого кулачкового распределительного вала и определяемым статическим заданным фазовым положением первого кулачкового распределительного вала.
В некоторых вариантах выполнения способ также содержит другие стадии, чем указанные выше.
В некоторых вариантах выполнения способ может осуществляться с помощью управляющего устройства, указанного выше.
Ниже приводится описание примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг.1 - пример выполнения управляющего устройства для управления фазовым положением первого кулачкового распределительного вала и фазовым положением второго кулачкового распределительного вала и угла зажигания двигателя внутреннего сгорания;
фиг.2 - выполнение способа управления кулачковым распределительным валом двигателя внутреннего сгорания.
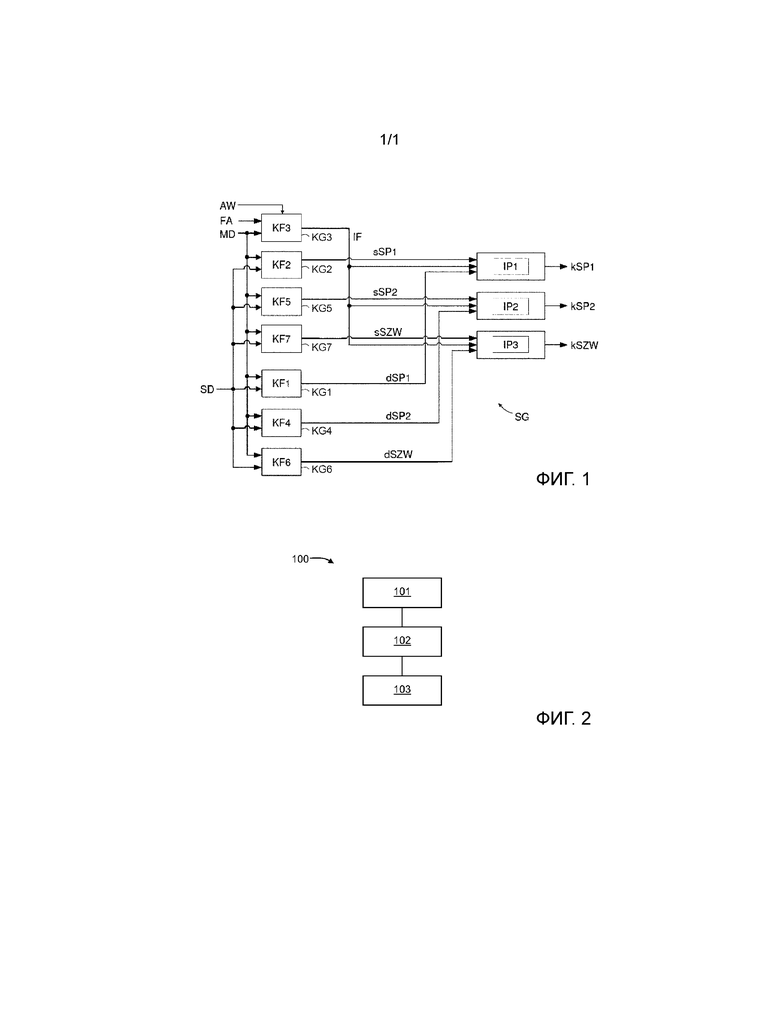
Показанное на фиг.1 управляющее устройство SG для управления фазовым положением первого кулачкового распределительного вала, который является здесь впускным кулачковым распределительным валом, и фазовым положением второго кулачкового распределительного вала, который является здесь выпускным кулачковым распределительным валом, и угла зажигания двигателя внутреннего сгорания содержит первый датчик KG1 параметрической поверхности для определения динамического заданного фазового положения dSP1 первого кулачкового распределительного вала. Первый датчик KG1 параметрической поверхности имеет входной интерфейс для приема фактического значения MD скорости вращения двигателя и для приема фактического значения SD давления впускного газопровода двигателя внутреннего сгорания. Первый датчик KG1 параметрической поверхности предназначен для определения из этих значений MD, SD динамического заданного фазового положения dSP1 впускного кулачкового распределительного вала.
Кроме того, управляющее устройство SG содержит второй датчик KG2 параметрической поверхности, третий датчик KG3 параметрической поверхности, четвертый датчик KG4 параметрической поверхности, пятый датчик KG5 параметрической поверхности, шестой датчик KG6 параметрической поверхности и седьмой датчик KG7 параметрической поверхности. Каждый из датчиков KG1, KG2 и KG4-KG7 параметрической поверхности имеет соответствующую ему собственную параметрическую поверхность KF1, KF2, K4, …, KF7. Второй датчик KG2, четвертый датчик KG4, пятый датчик KG5, шестой датчик KG6 и седьмой датчик KG7 имеет соответствующий входной интерфейс для приема фактического значения MD скорости вращения двигателя и для приема фактического значения SD давления во впускном газопроводе двигателя внутреннего сгорания.
Второй датчик KG2 параметрической поверхности предназначен для определения из этих значений MD, SD статического заданного фазового положения sSP1 впускного кулачкового распределительного вала. Четвертый датчик KG4 параметрической поверхности предназначен для определения из этих значений MD, SD динамического заданного фазового положения dSP2 выпускного кулачкового распределительного вала. Второй датчик KG2 параметрической поверхности предназначен для определения из этих значений MD, SD статического заданного фазового положения dSP1 впускного кулачкового распределительного вала. Пятый датчик KG5 параметрической поверхности предназначен для определения из этих значений MD, SD статического заданного фазового положения dSP2 выпускного кулачкового распределительного вала. Шестой датчик KG6 параметрической поверхности предназначен для определения из этих значений MD, SD динамического заданного угла dSZW зажигания. Седьмой датчик KG7 параметрической поверхности предназначен для определения из этих значений MD, SD статического заданного угла sSZW зажигания.
Кроме того, управляющее устройство SG содержит третий датчик KG3 параметрической поверхности для определения интерполяционного фактора IF. Третий датчик KG3 параметрической поверхности имеет входной интерфейс для приема фактического значения MD скорости вращения двигателя и для приема фактического отклонения FA заполнения двигателя внутреннего сгорания. Третий датчик KG3 параметрической поверхности предназначен для определения из этих значений интерполяционного фактора IF на основании находящейся в его памяти параметрической поверхности KF3.
Каждый из датчиков KG1-KG7 может иметь соответствующую (не изображенную на фигурах) аналоговую и/или цифровую электронную схему. Цифровая схема соответствующего датчика параметрической поверхности может содержать, например, микропроцессор и отдельно соответствующую ему таблицу параметрических поверхностей KF1-KF7. Соответствующая таблица параметрической поверхности может находиться с возможностью вызова в банке данных. В таблицах параметрических поверхностей KF1, KF2 и KF4-KF7 (или в соответствующем банке данных) могут быть представлены ключевые значения возможных значений скорости вращения двигателя и давления впускного газопровода, с помощью которых можно осуществлять быстрый поиск подходящего набора данных (например, с помощью бинарного поиска). Для третьей параметрической поверхности KF3 это справедливо, соответственно, относительно значений MD скорости вращения двигателя и отклонений FA заполнения.
Кроме того, управляющее устройство SG имеет первый интерполятор IP1. Первый интерполятор IP1 содержит входной интерфейс для приема следующих значений: интерполяционного фактора IF, статического заданного фазового положения sSP1 для впускного кулачкового распределительного вала, динамического заданного фазового положения dSP1 впускного кулачкового распределительного вала. Динамическое заданное фазовое положение dSP1 впускного кулачкового распределительного вала поставляется первым датчиком KG1 параметрической поверхности. Статическое заданное фазовое положение sSP1 впускного кулачкового распределительного вала поставляется вторым датчиком KG2 параметрической поверхности. Первый интерполятор IP1 предназначен для определения из этих значений исправленного заданного фазового положения kSP1 впускного кулачкового распределительного вала.
Кроме того, управляющее устройство SG имеет второй интерполятор IP2. Второй интерполятор IP2 содержит входной интерфейс для приема следующих значений: интерполяционного фактора IF, статического заданного фазового положения sSP2 для выпускного кулачкового распределительного вала, динамического заданного фазового положения dSP2 выпускного кулачкового распределительного вала. Динамическое заданное фазовое положение dSP2 выпускного кулачкового распределительного вала поставляется четвертым датчиком KG4 параметрической поверхности. Статическое заданное фазовое положение sSP2 выпускного кулачкового распределительного вала поставляется пятым датчиком KG5 параметрической поверхности. Второй интерполятор IP2 предназначен для определения из этих значений исправленного заданного фазового положения kSP2 выпускного кулачкового распределительного вала.
Кроме того, управляющее устройство SG содержит третий интерполятор IP3. Третий интерполятор IP3 имеет входной интерфейс для приема следующих значений: интерполяционного фактора IF, статического заданного угла sSZW зажигания, динамического заданного угла dSZW зажигания. Динамический заданный угол dSZW зажигания поставляется шестым датчиком KG6 параметрической поверхности. Статический заданный угол sSZW зажигания поставляется седьмым датчиком KG7 параметрической поверхности. Третий интерполятор IP3 предназначен для определения из этих значений исправленного угла kSZW зажигания двигателя внутреннего сгорания.
Предпочтительно, третий датчик KG3 параметрической поверхности имеет вход AW сигнала выбора. Вход AW сигнала выбора служит для выбора интерполяционного фактора IF и/или первой параметрической поверхности KF1 первого датчика KG1 параметрической поверхности, и/или второй параметрической поверхности KF2 второго датчика KG2 параметрической поверхности, и/или третьей параметрической поверхности KF3 третьего датчика KG3 параметрической поверхности и/или первой параметрической поверхности KF1 первого датчика KG1 параметрической поверхности, и/или четвертой параметрической поверхности KF4 четвертого датчика KG4 параметрической поверхности, и/или пятой параметрической поверхности KF5 пятого датчика KG5 параметрической поверхности, и/или шестой параметрической поверхности KF6 шестого датчика KG6 параметрической поверхности, и/или седьмой параметрической поверхности KF7 седьмого датчика KG7 параметрической поверхности в зависимости от зависящих от типа двигателя или типа транспортного средства параметров или в зависимости от других параметров.
С помощью входа AW выбора сигнала можно устанавливать вручную или с помощью сенсорного управления динамику срабатывания приводного агрегата, который имеет двигатель внутреннего сгорания, в зависимости, например, от грузоподъемности частей двигателя или транспортного средства, в зависимости от фактической загрузки транспортного средства, в зависимости от загрузки прицепа, в зависимости от желания водителя и/или водителя-напарника, и/или в зависимости от назначения транспортного средства. Регулирование с помощью сенсорного управления динамики срабатывания может осуществляться, например, с учетом выходного сигнала датчика загрузки, выходного сигнала датчика загрузки прицепа, выходного сигнала датчика полезной нагрузки, выходного сигнала датчика распознавания типа транспортного средства и/или выходного сигнала функции персональных данных водителя или водителя-напарника транспортного средства. Для учета интересов отдельных водителей-напарников может быть целесообразным, когда из желаемых динамик срабатывания всех водителей-напарников (включая водителя) выбирается и устанавливается наименьшая (т.е. наиболее безопасная) динамика срабатывания. Соответствующая концепция определения динамики срабатывания может применяться с использованием общего количества или любого (истинного) частичного количества указанных выше выходных сигналов.
Показанный на фиг. 2 способ 100 управления фазовым положением кулачкового распределительного вала двигателя внутреннего сгорания содержит следующие стадии. На первой стадии 101 определяется динамическое заданное фазовое положение dSP1 первого кулачкового распределительного вала с помощью первого датчика KG1 параметрической поверхности, как пояснено выше применительно к фиг. 1.
На второй стадии 102 с помощью второго датчика KG2 параметрической поверхности определяется статическое заданное фазовое положение sSP1 первого кулачкового распределительного вала, как также пояснено выше применительно к фиг. 1.
На третьей стадии 103 определяется исправленное заданное фазовое положение kSP1 первого кулачкового распределительного вала с помощью интерполяции между определяемым первым датчиком KG1 динамическим заданным фазовым положением dSP1 первого кулачкового распределительного вала и определяемым вторым датчиком KG2 статическим заданным фазовым положением sSP1 первого кулачкового распределительного вала. Динамическое заданное фазовое положение dSP1 первого кулачкового распределительного вала может определяться, например, с учетом скорости MD вращения двигателя и давления SD впускного газопровода, т.е. как указывалось выше. То же относится к определению статического заданного фазового положения sSP1.
Предпочтительно, при определении исправленного заданного фазового положения kSP1 первого кулачкового распределительного вала учитывается интерполяционный фактор IF. Интерполяционный фактор IF может определяться, например, с помощью третьего датчика KG3 параметрической поверхности с учетом скорости MD вращения двигателя и отклонения FA заполнения, как указывалось выше. Интерполяционный фактор IF и/или первая параметрическая поверхность KF1 первого датчика KG1 параметрической поверхности, и/или вторая параметрическая поверхность KF2 второго датчика KG2 параметрической поверхности, и/или третья параметрическая поверхность KF3 третьего датчика KG3 параметрической поверхности, и/или четвертая параметрическая поверхность KF4 четвертого датчика KG4 параметрической поверхности, и/или пятая параметрическая поверхность KF5 пятого датчика KG5 параметрической поверхности, и/или шестая параметрическая поверхность KF6 шестого датчика KG6 параметрической поверхности, и/или седьмая параметрическая поверхность KF7 седьмого датчика KG7 параметрической поверхности может определяться, например, в зависимости от зависящего от типа двигателя параметра или с помощью входной величины входа AW выбора сигнала, как указывалось выше.
Для ввода информации о скорости вращения двигателя, информации о давлении впускного газопровода и выдачи информации о динамическом заданном фазовом положении, электронная схема может иметь соответствующие цифровые (или аналоговые) входные и выходные интерфейсы, как указывалось выше.
Перечень позиций
AW Вход выбора сигнала
dSP1 Динамическое заданное фазовое положение первого кулачкового распределительного вала (впускного кулачкового
распределительного вала)
dSP2 Динамическое заданное фазовое положение второго кулачкового распределительного вала (выпускного кулачкового
распределительного вала)
dSZW Динамический заданный угол зажигания
FA Отклонение заполнения
IF Интерполяционный фактор
kSP1 Исправленное заданное фазовое положение первого кулачкового распределительного вала (впускного кулачкового
распределительного вала)
kSP2 Исправленное заданное фазовое положение второго кулачкового распределительного вала (выпускного кулачкового
распределительного вала)
kSZW Исправленный заданный угол зажигания
KF1 Первая параметрическая поверхность
KF2 Вторая параметрическая поверхность
KF3 Третья параметрическая поверхность
KF4 Четвертая параметрическая поверхность
KF5 Пятая параметрическая поверхность
KF6 Шестая параметрическая поверхность
KF7 Седьмая параметрическая поверхность
KG1 Первый датчик параметрической поверхности
KG2 Второй датчик параметрической поверхности
KG3 Третий датчик параметрической поверхности
KG4 Четвертый датчик параметрической поверхности
KG5 Пятый датчик параметрической поверхности
KG6 Шестой датчик параметрической поверхности
KG7 Седьмой датчик параметрической поверхности
MD Скорость вращения двигателя
SD Давление впускного газопровода
SG Управляющее устройство
sSP1 Статическое заданное фазовое положение первого кулачкового распределительного вала (впускного кулачкового
распределительного вала)
sSP2 Статическое заданное фазовое положение второго кулачкового распределительного вала (выпускного кулачкового
распределительного вала)
sSZW Статический заданный угол зажигания
100 Способ управления первым кулачковым распределительным валом двигателя внутреннего сгорания
101 Определение динамического заданного фазового положения первого кулачкового распределительного вала
102 Определение статического заданного фазового положения первого кулачкового распределительного вала
103 Определение исправленного заданного фазового положения первого кулачкового распределительного вала
Изобретение относится к двигателю внутреннего сгорания, в частности к управляющему устройству для управления фазовым положением кулачкового распределительного вала. Технический результат заключается в повышении эффективности управления фазовым положением кулачкового распределительного вала. Предложено управляющее устройство (SG) для управления фазовым положением первого кулачкового распределительного вала двигателя внутреннего сгорания, содержащее: первый датчик (KG1) параметрической поверхности для определения динамического заданного фазового положения (dSP1) первого кулачкового распределительного вала; второй датчик (KG2) параметрической поверхности для определения статического заданного фазового положения (sSP1) первого кулачкового распределительного вала; и первый интерполятор (IP1) для определения исправленного заданного фазового положения (kSP1) первого кулачкового распределительного вала на основании определяемого первым датчиком (KG1) параметрической поверхности динамического заданного фазового положения (dSP1) первого кулачкового распределительного вала и определяемого вторым датчиком (KG2) параметрической поверхности статического заданного фазового положения (sSP1) первого кулачкового распределительного вала. 3 н. и 9 з.п. ф-лы, 2 ил.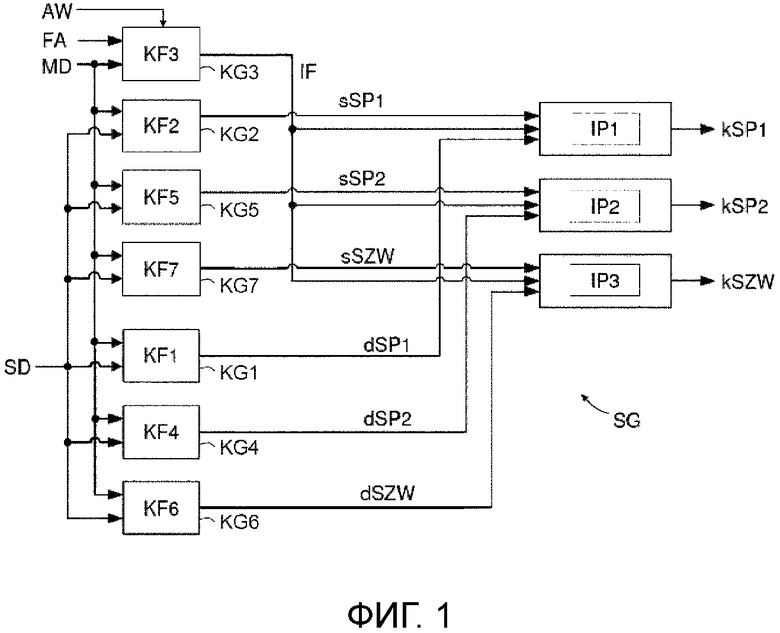
1. Управляющее устройство (SG) для управления фазовым положением первого кулачкового распределительного вала двигателя внутреннего сгорания, содержащее:
- первый датчик (KG1) параметрической поверхности для определения динамического заданного фазового положения (dSP1) первого кулачкового распределительного вала через первую параметрическую поверхность, которая оптимизирована относительно отдачи максимального крутящего момента, причем первый датчик (KG1) параметрической поверхности предусмотрен для определения обеспечиваемого им выдаваемого значения на основании скорости (MD) вращения двигателя внутреннего сгорания и давления (SD) впускного газопровода двигателя внутреннего сгорания;
- второй датчик (KG2) параметрической поверхности для определения статического заданного фазового положения (sSP1) первого кулачкового распределительного вала через вторую параметрическую поверхность, которая оптимизирована относительно оптимального коэффициента полезного действия двигателя внутреннего сгорания; и
- первый интерполятор (IP1) для определения исправленного заданного фазового положения (kSP1) первого кулачкового распределительного вала на основании определяемого первым датчиком (KG1) параметрической поверхности динамического заданного фазового положения (dSP1) первого кулачкового распределительного вала и определяемого вторым датчиком (KG2) параметрической поверхности статического заданного фазового положения (sSP1) первого кулачкового распределительного вала.
2. Управляющее устройство (SG) по п.1, в котором исправленное заданное фазовое положение (kSP1) первого кулачкового распределительного вала определяется на основании требуемого крутящего момента.
3. Управляющее устройство (SG) по п.1 или 2, в котором первый интерполятор (IP1) предназначен для определения исправленного заданного фазового положения (kSP1) первого кулачкового распределительного вала на основании интерполяционного фактора (IF).
4. Управляющее устройство (SG) по п.3, содержащее дополнительно третий датчик (KG3) параметрической поверхности для определения интерполяционного фактора (IF) на основании скорости (MD) вращения двигателя внутреннего сгорания и/или отклонения (FA) заполнения цилиндра двигателя внутреннего сгорания.
5. Управляющее устройство (SG) по п.1, дополнительно содержащее:
- четвертый датчик (KG4) параметрической поверхности для определения динамического заданного фазового положения (dSP2) второго кулачкового распределительного вала двигателя внутреннего сгорания;
- пятый датчик (KG5) параметрической поверхности для определения статического заданного фазового положения (sSP2) второго кулачкового распределительного вала; и
- второй интерполятор (IP2) для определения исправленного заданного фазового положения (kSP2) второго кулачкового распределительного вала на основании определяемого с помощью четвертого датчика (KG4) параметрической поверхности динамического заданного фазового положения (dSP2) второго кулачкового распределительного вала и определяемого с помощью пятого датчика (KG5) параметрической поверхности статического заданного фазового положения (sSP2) второго кулачкового распределительного вала.
6. Управляющее устройство (SG) по п.1, дополнительно содержащее:
- шестой датчик (KG6) параметрической поверхности для определения динамического заданного угла (dSZW) зажигания двигателя внутреннего сгорания;
- седьмой датчик (KG7) параметрической поверхности для определения статического заданного фазового положения угла (dSZW) зажигания двигателя внутреннего сгорания; и
- третий интерполятор (IP3) для определения исправленного заданного угла (kSZW) зажигания на основании определяемого с помощью шестого датчика (KG6) параметрической поверхности динамического заданного угла (dSZW) зажигания и определяемого с помощью седьмого датчика (KG7) параметрической поверхности статического заданного угла (sSZW) зажигания двигателя внутреннего сгорания.
7. Управляющее устройство (SG) по п.5, в котором второй интерполятор (IP2) предназначен для определения исправленного заданного фазового положения (kSP2) второго кулачкового распределительного вала на основании интерполяционного фактора (IF).
8. Управляющее устройство (SG) по п.6, в котором третий интерполятор (IP3) предназначен для определения исправленного заданного угла (kSZW) зажигания на основании интерполяционного фактора (IF).
9. Управляющее устройство (SG) по п.1, в котором второй (KG2), четвертый (KG4), пятый (KG5), шестой (KG6) и/или седьмой датчик (KG7) параметрической поверхности предназначен для определения обеспечиваемого им выдаваемого значения на основании скорости (MD) вращения двигателя внутреннего сгорания и/или давления (SD) впускного газопровода двигателя внутреннего сгорания.
10. Управляющее устройство (SG) по п.1, в котором управляющее устройство (SG) предназначено для выбора интерполяционного фактора (IF) первой параметрической поверхности (KF1) первого датчика (KG1) параметрической поверхности, второй параметрической поверхности (KF2) второго датчика (KG2) параметрической поверхности, третьей параметрической поверхности (KF3) третьего датчика (KG3) параметрической поверхности, четвертой параметрической поверхности (KF4) четвертого датчика (KG4) параметрической поверхности, пятой параметрической поверхности (KF5) пятого датчика (KG5) параметрической поверхности, шестой параметрической поверхности (KF6) шестого датчика (KG6) параметрической поверхности и/или седьмой параметрической поверхности (KF7) седьмого датчика (KG7) параметрической поверхности в зависимости от зависящих от типа двигателя и/или от типа транспортного средства параметров.
11. Транспортное средство, которое содержит управляющее устройство (SG) по любому из пп.1-10.
12. Способ (100) управления фазовым положением первого кулачкового распределительного вала двигателя внутреннего сгорания, при этом способ (100) содержит стадии:
- определения (101) динамического заданного фазового положения (dSP1) первого кулачкового распределительного вала на основании первой параметрической поверхности (KF1), которая оптимизирована относительно отдачи максимального крутящего момента, причем обеспечиваемое выдаваемое значение определяют на основании скорости (MD) вращения двигателя внутреннего сгорания и давления (SD) впускного газопровода двигателя внутреннего сгорания;
- определения (102) статического заданного фазового положения (sSP1) первого кулачкового распределительного вала на основании второй параметрической поверхности (KF2), которая оптимизирована относительно оптимального коэффициента полезного действия двигателя внутреннего сгорания; и
- определения (103) исправленного заданного фазового положения (kSP1) первого кулачкового распределительного вала на основании интерполяции между определяемым динамическим заданным фазовым положением (dSP1) первого кулачкового распределительного вала и определяемым статическим заданным фазовым положением (sSP1) первого кулачкового распределительного вала.
| US 5609126 A, 1997-03-11 | |||
| DE 102005035239 A1, 2007-02-01 | |||
| US 6371066 B1, 2002-04-16 | |||
| Воднополимерная краска для декоративно-оформительских работ | 1984 |
|
SU1229215A1 |
| US 2013247853 A1, 2013-09-26 | |||
| МОДУЛЬ УПРАВЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ (ВАРИАНТЫ) ДЛЯ МЕХАНИЗМА РЕГУЛИРУЕМЫХ ФАЗ ГАЗОРАСПРЕДЕЛЕНИЯ | 2008 |
|
RU2432479C2 |

