Область техники
Настоящее изобретение относится к области обнаружения излучения и, более конкретно, к способу и системе рентгеновского сканирования.
Уровень техники
Технология рентгеновского сканирования и отображения широко используется в различных отраслях, таких как осуществляемый службой безопасности контроль, техническая рентгенография, медицинское обследование и т.п. В частности, применяемое службой безопасности оборудование рентгеновского контроля широко используется в различных местах, таких как автостанции, порты, аэропорты, конференц-центры и т.п. В большинстве систем рентгеновского сканирования процесс сканирования осуществляют таким образом, что плоскость испускаемых пучков рентгеновских лучей остается неподвижной, и система доставки перемещает проверяемый объект через плоскость испускаемых пучков рентгеновских лучей. Однако в некоторых случаях перемещение проверяемого объекта может быть невозможно. Например, проверяемый объект может представлять собой неподвижно установленное промышленное устройство; или, когда осуществляют проверку человеческого тела, подвергаемый проверке человек может столкнуться с трудностями сохранения равновесия во время перемещения. В этом случае для осуществления процесса сканирования система сканирования должна осуществить перемещение плоскости испускаемых пучков рентгеновских лучей. Таким образом, существует потребность в создании системы отображения, в которой при неподвижном проверяемом объекте устройство рентгеновского сканирования может перемещать плоскость испускаемых пучков рентгеновских лучей таким образом, чтобы мог быть осуществлен процесс сканирования.
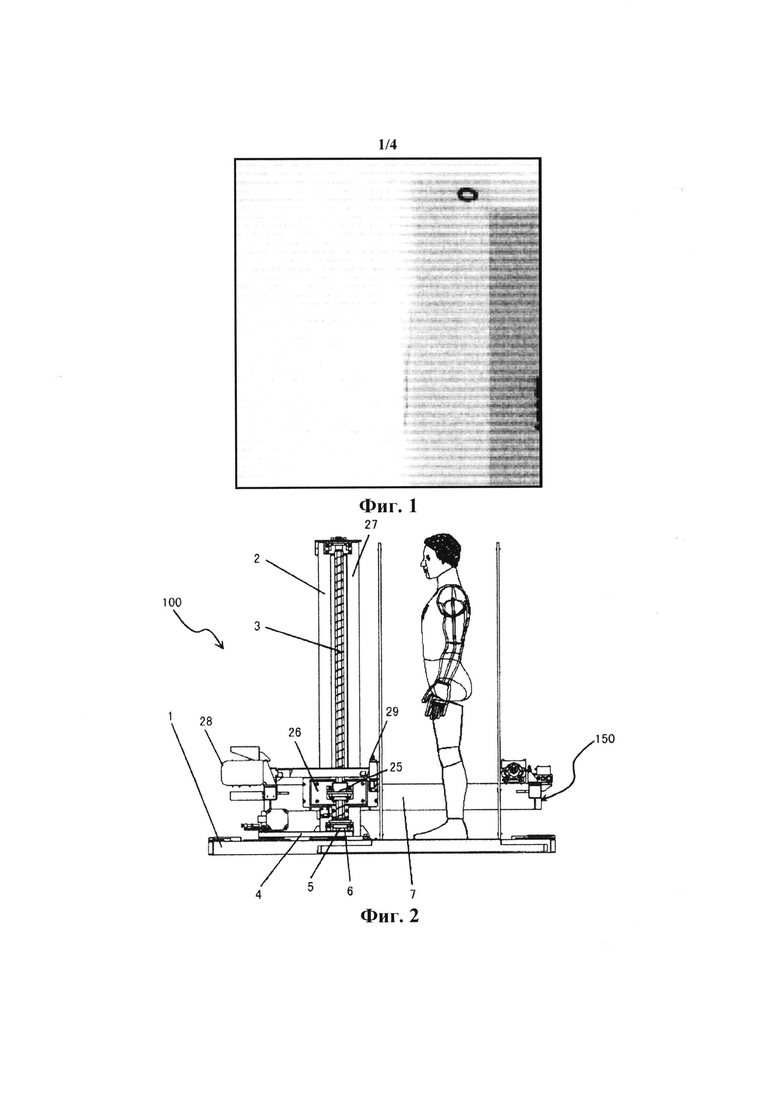
Когда проверяемый объект остается неподвижным, и происходит перемещение плоскости испускаемых пучков рентгеновских лучей, из-за неизбежной вибрации, возникающей при движении некоторых компонентов, генератор рентгеновского излучения не может оставаться неподвижным относительно детектора во время процесса сканирования. Это может привести к нестабильной интенсивности рентгеновских лучей, принимаемых детектором. В этом случае, если для обработки полученного изображения применяют традиционные способы коррекции (такие как, например, простая передача данных, а также анализ и обработку для снижения шумов), на изображении будут неизбежно возникать полосовые шумы, как показано на фиг. 1.
Сущность изобретения
Настоящее изобретение предоставляет способ и систему рентгеновского сканирования для решения известной из уровня техники проблемы шума, который вызван механической вибрацией, возникающей в ходе существующего процесса рентгеновского сканирования статического объекта.
Для решения указанных выше проблем настоящее изобретение предоставляет способ рентгеновского сканирования, включающий:
сбор данных фона без испускания рентгеновских лучей;
сбор данных воздушной среды при испускании рентгеновских лучей и без сканируемого объекта в исследуемом канале;
сканирование объекта для сбора исходных данных сканирования; и
предварительную обработку исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Предпочтительно, стадия сбора данных фона может дополнительно включать:
усреднение данных фона для получения усредненных данных фона.
Предпочтительно, стадия сбора данных воздушной среды может дополнительно включать:
усреднение данных воздушной среды для получения усредненных данных воздушной среды.
Предпочтительно, стадия предварительной обработки исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, может дополнительно включать:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Предпочтительно, стадия сегментирования области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования может включать: сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта посредством использования заранее заданного порога.
Предпочтительно, стадия сегментирования области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования может также включать: сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта посредством использования способа разделения по порогу, способа обнаружения краев или способа наращивания областей.
Предпочтительно, стадия предварительной обработки исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, может дополнительно включать:
определение некоторой подобласти из области сканирования, в которой не включается наличие объекта, в качестве занимаемой воздушной средой области, и определение остальной части области сканирования в качестве занимаемой объектом области; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Согласно другому аспекту настоящее изобретение также предоставляет систему рентгеновского сканирования, содержащую:
генератор рентгеновского излучения, адаптированный для испускания рентгеновских лучей;
детектор, который остается неподвижным относительно генератора рентгеновского излучения и адаптирован для сбора детекторных сигналов рентгеновских лучей; и
процессор, связанный с детектором и адаптированный для обработки детекторных сигналов рентгеновских лучей, собранных детектором, при этом указанная обработка включает:
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения не испускает рентгеновских лучей, в качестве данных фона;
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения испускает рентгеновские лучи и сканируемый объект отсутствует в исследуемом канале, в качестве данных воздушной среды;
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения испускает рентгеновские лучи для сканирования объекта, в качестве исходных данных сканирования; и
предварительную обработку исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Предпочтительно, процессор дополнительно адаптирован для следующего:
усреднение данных фона для получения усредненных данных фона; и/или
усреднение данных воздушной среды для получения усредненных данных воздушной среды.
Предпочтительно, система может также содержать:
коллиматор, который закреплен на оптическом пути между генератором рентгеновского излучения и детектором, при этом коллиматор остается неподвижным относительно генератора рентгеновского излучения и детектора и адаптирован для придания параллельности рентгеновским лучам, испускаемым генератором рентгеновского излучения.
Предпочтительно, процессор дополнительно адаптирован для следующего:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Предпочтительно, процессор дополнительно адаптирован для следующего:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта при помощи заранее заданного порога.
Предпочтительно, процессор дополнительно адаптирован для следующего: сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта при помощи способа разделения по порогу, способа обнаружения краев или способа наращивания областей.
Предпочтительно, процессор дополнительно адаптирован для следующего:
определение некоторой подобласти из области сканирования, в которой не включается наличие объекта, в качестве занимаемой воздушной средой, области, и определение остальной части области сканирования в качестве занимаемой объектом области; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Таким образом, при осуществлении рентгеновского сканирования неподвижного объекта, способ рентгеновского сканирования и система сканирования в соответствии с вариантами осуществления настоящего изобретения осуществляют измерение данных фона и данных воздушной среды и обработку данных сканирования, решая проблему шума, вызванного механической вибрацией, и улучшая точность измерения.
Краткое описание чертежей
С целью более ясной иллюстрации технических решений, раскрытых в вариантах осуществления настоящего изобретения или уровне техники, ниже приведено краткое описание прилагаемых фигур, необходимых для описания вариантов осуществления настоящего изобретения или уровня техники. Очевидно, что описанные ниже прилагаемые фигуры иллюстрируют лишь некоторые варианты осуществления настоящего изобретения, и специалисты в данной области техники могут легко получить другие фигуры после ознакомления с этими фигурами.
На фиг. 1 изображено иллюстративное графическое представление полосового шума, генерируемого в известных системах;
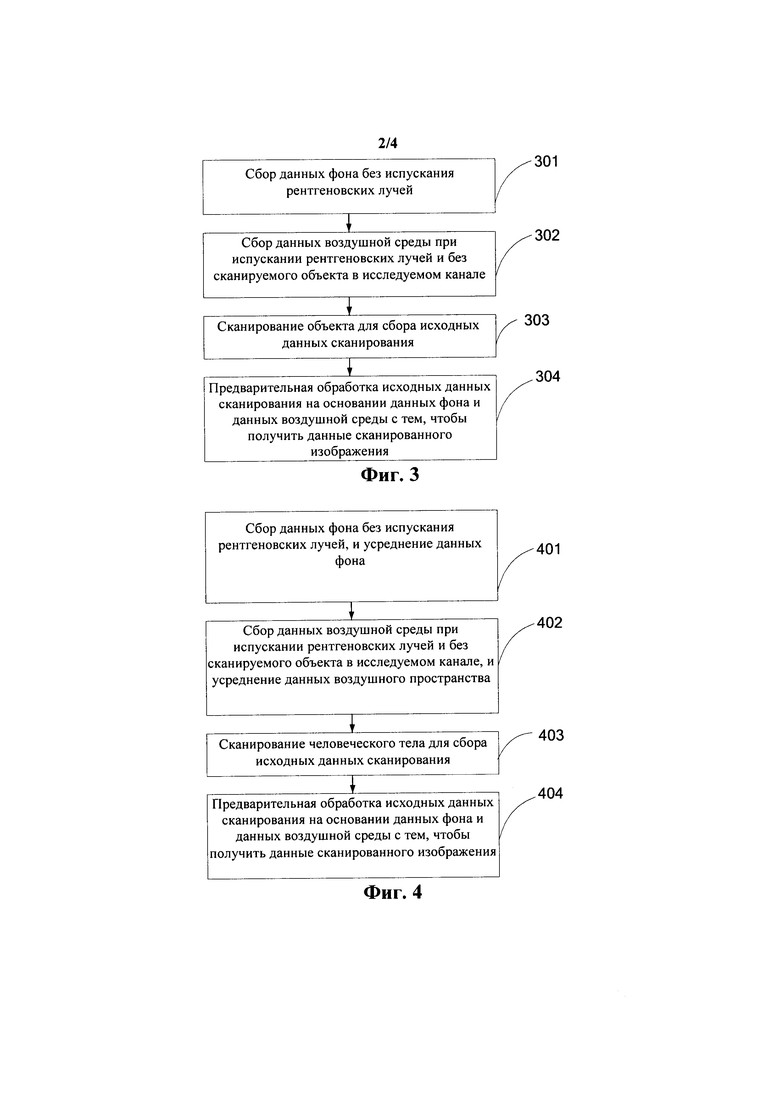
На фиг. 2 изображена структурная схема, иллюстрирующая охранную систему контроля человеческого тела;
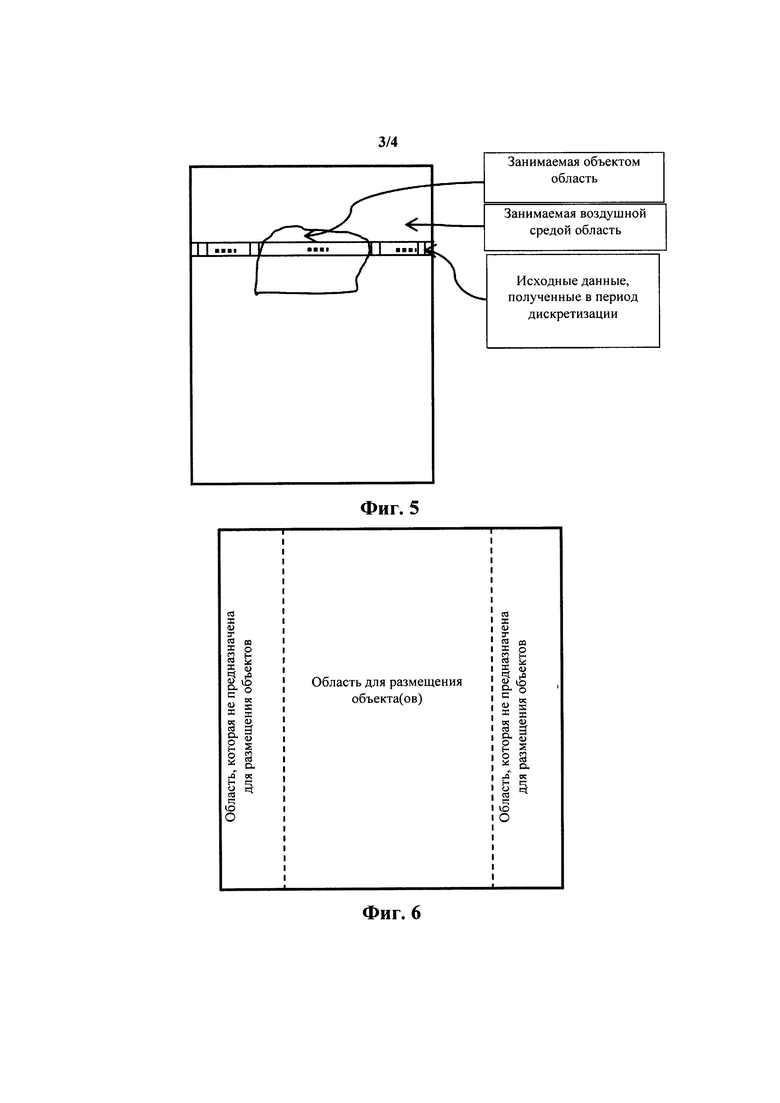
На фиг. 3 изображена основная схема последовательности операций, иллюстрирующая способ рентгеновского сканирования в соответствии с вариантами осуществления настоящего изобретения;
На фиг. 4 изображена схема последовательности операций, иллюстрирующая способ рентгеновского сканирования человеческого тела в соответствии с примером 1 настоящего изобретения;
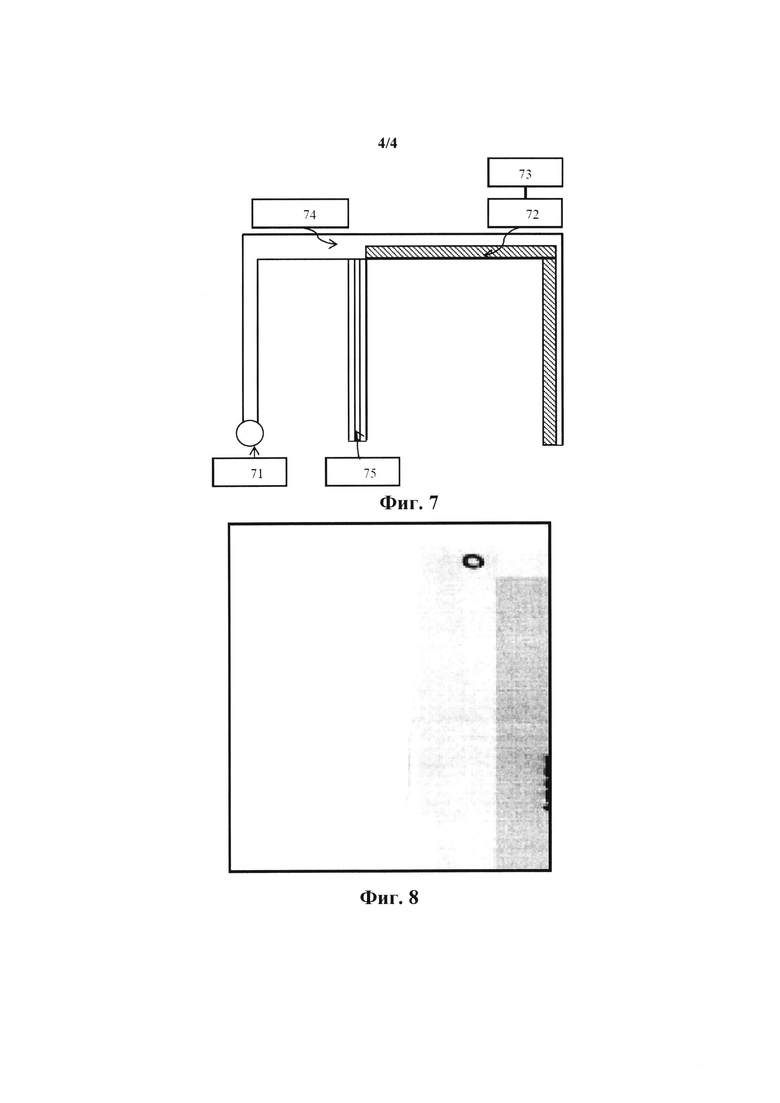
На фиг. 5 изображено графическое представление, иллюстрирующее сегментирование занимаемой объектом области и занимаемой воздушной средой области в соответствии с примером 1 настоящего изобретения;
На фиг. 6 изображено графическое представление, иллюстрирующее способ ограничения области сканирования в соответствии с примером 1 настоящего изобретения;
На фиг. 7 изображена структурная схема системы рентгеновского сканирования в соответствии с примером 2 настоящего изобретения; и
на фиг. 8 изображено иллюстративное графическое представление сканированного изображения в соответствии с вариантами осуществления настоящего изобретения.
Подробное описание изобретения
Для того чтобы сделать объекты, технические решения и преимущества вариантов осуществления настоящего изобретения более очевидными, технические решения вариантов осуществления настоящего изобретения будут описаны ясно и максимально доступно со ссылками на фигуры, связанные с вариантами осуществления настоящего изобретения. Очевидно, что описанные варианты осуществления являются лишь частью, но не всеми вариантами осуществления настоящего изобретения. Исходя из описанных в настоящем документе вариантов осуществления, специалисты в данной области техники, не осуществляя изобретательской деятельности, могут получить другие варианты осуществления, которые будут находиться в пределах объема настоящего изобретения.
На фиг. 2 изображена охранная система контроля человеческого тела, в которой предусмотрена возможность перемещения плоскости испускаемых пучков рентгеновских лучей, при этом проверяемый объект остается неподвижным. Указанная система содержит: основание 1, стойку 2, установленную на основании 1, поверхность 3 для установки коллиматора, зубчатый ремень 4, зубчатые шкивы 5, подшипниковый узел 6, цельное плечо 7, гайку 25, ползун 26, направляющую штангу 27, электродвигатель 28, устройство 29 для регулировки коллиматора и устройство 150 сканирования и отображения, которое выполнено с возможностью перемещения и присоединено к стойке 2. Охранная система контроля человеческого тела может содержать приводное устройство 100 для перемещения устройства 150 сканирования и отображения вдоль заданного направления (такого как вертикальное направление, как изображено на фиг. 2) таким образом, чтобы осуществлять процесс сканирования. На фиг. 2 источник рентгеновского излучения, коллиматор и детектор устройства 150 сканирования и отображения неподвижно соединены друг с другом при помощи цельного плеча 7 с образованием цельной конструкции.
Рассмотрим фиг. 3, на которой представлен способ рентгеновского сканирования в соответствии с вариантами осуществления настоящего изобретения, который включает следующие стадии:
стадия 301: сбор данных фона без испускания рентгеновских лучей;
стадия 302: сбор данных воздушной среды при испускании рентгеновских лучей и без сканируемого объекта в исследуемом канале;
стадия 303: сканирование объекта для сбора исходных данных сканирования; и
стадия 304: предварительная обработка исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Кроме того, на стадии сбора данных воздушной среды, когда осуществляют испускание рентгеновских лучей и сканируемый объект отсутствует в исследуемом канале, генератор рентгеновского излучения, детектор и плоскость пучка рентгеновских лучей, испускаемых из генератора рентгеновского излучения, перемещают во время процесса сканирования.
Для того чтобы получить более точные измерения, собранные данные фона и/или данные воздушной среды могут быть усреднены. Предпочтительно, способ может включать: усреднение данных фона для получения усредненных данных фона или усреднение данных воздушной среды для получения усредненных данных воздушной среды.
Предпочтительно, стадия предварительной обработки исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, может дополнительно включать:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Предпочтительно, стадия сегментирования области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования может включать: сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта посредством использования заранее заданного порога.
Предпочтительно, стадия сегментирования области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования может также включать: сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта посредством использования способа разделения по порогу, способа обнаружения краев или способа наращивания областей.
Кроме того, способ разделения по порогу может быть использован для проведения различия между порогами уровней серого цели (т.е. занимаемой объектом области) и фона (т.е. занимаемой воздушной средой области). Если изображение содержит только цель и фон, то способ может выбрать единый порог, что также известно в качестве сегментирования на основе единого порога. Сегментирование при помощи заранее заданного порога является одним из видов сегментирования на основе единого порога. Способ обнаружения краев является наиболее популярным способом обнаружения нарушения непрерывности уровня серого. Этот способ основан на исходных данных сканирования и использует производную первого порядка и/или производную второго порядка для обнаружения нарушения непрерывности уровня серого на изображении, в результате чего могут быть сегментированы занимаемая объектом область и занимаемая воздушной средой область изображения. Основной принцип способа наращивания областей заключается в сборе пикселей с подобными свойствами для формирования некоторой области. Указанный способ начинают с выбора исходной точки (т.е. исходного пикселя), после чего осуществляют объединение подобных пикселей вокруг исходного пикселя с образованием области, содержащей исходный пиксель. В результате этого могут быть получены занимаемая объектом область и занимаемая воздушной средой область исходных данных сканирования.
Предпочтительно, стадия предварительной обработки исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, может дополнительно включать:
определение некоторой подобласти из области сканирования, в которой не включается наличие объекта, в качестве занимаемой воздушной средой области, и определение остальной части области сканирования в качестве занимаемой объектом области; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Пример 1
В примере 1 настоящего изобретения представлен способ рентгеновского сканирования, который адаптирован для осуществления сканирования человеческого тела. Если плоскость испускаемых пучков рентгеновских лучей является фиксированной, а проверяемый человек проходит через плоскость испускаемых пучков рентгеновских лучей, стоя на транспортерной ленте, движения тела будут отрицательно влиять на результат проверки, так как человеку нелегко сохранять равновесие при перемещении. Следовательно, в процессе сканирования согласно примеру 1 проверяемый человек стоит в заданном фиксированном положении, и процесс сканирования осуществляют посредством перемещения генератора рентгеновского излучения и детектора (при этом их относительное положение зафиксировано) в вертикальном направлении относительно плоскости испускания пучков рентгеновских лучей. Во время этого процесса сканирования единственное требование к проверяемому человеку заключается в том, чтобы он стоял неподвижно.
Рассмотрим, в частности, фиг. 4, для того чтобы осуществить коррекцию полосового шума (который обусловлен механической вибрацией, возникающей во время процесса сканирования) на изображениях, способ сканирования согласно примеру 1 настоящего изобретения может включать наличие следующих стадий:
Стадия 401: сбор данных фона без испускания рентгеновских лучей, и усреднение данных фона.
На этой стадии данные фона собирают без испускания рентгеновских лучей. Поскольку во время сбора данных фона испускание рентгеновских лучей будет отсутствовать, отсутствует проблема, заключающаяся в том, что полученные детектором рентгеновские лучи имеют нестабильную интенсивность из-за механической вибрации, возникающей во время процесса сканирования.
Сбор данных фона может происходить в течение некоторого периода времени, и затем осуществляют их усреднение. Усредненные данные фона обозначают через Z(j), где j=1, …, n и j представляет собой порядковый номер канала детектора.
Стадия 402: сбор данных воздушной среды при испускании рентгеновских лучей и без сканируемого объекта в исследуемом канале, и усреднение данных воздушной среды.
На этой стадии данные воздушной среды собирают при испускании рентгеновских лучей и без сканируемого объекта в исследуемом канале. Данные воздушной среды, полученные путем сканирования, будут использованы при коррекции усиления для детектора. Поскольку во время процесса сканирования возникает механическая вибрация, данные воздушной среды будут иметь большие отклонения. Во время этого сбора генератор рентгеновского излучения и детектор перемещают в вертикальном направлении относительно плоскости испускаемых пучков рентгеновских лучей для осуществления сканирования без объекта, т.е. без объекта в канале сканирования. Вследствие этого будет получен набор данных воздушной среды F(i, j), где i=1, …, m, и j=1, …, n. Кроме того, «i» представляет собой порядковый номер периода дискретизации, при этом имеется т рядов данных, полученных во время процесса сканирования; и «j» представляет собой порядковый номер канала детектора, при этом всего имеется n каналов детектора. Более того, m и n могут также представлять собой соответственно высоту и ширину сканированного изображения.
После этого полученные данные воздушной среды F(i, j) могут быть усреднены по всем рядам, в результате чего получают усредненные данные воздушной среды  .
.
Стадия 403: сканирование человеческого тела для сбора исходных данных сканирования.
На этой стадии исходные данные сканирования собирают посредством перемещения генератора рентгеновского излучения и детектора с тем, чтобы осуществить нормальное сканирование человеческого тела, которое остается неподвижным. Исходные данные, полученные во время процесса сканирования человеческого тела, обозначают через R(i, j), где i=1, …, m, и j=1, …, n.
Стадия 404: предварительная обработка исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Коррекция с учетом фона и коррекция усиления (т.е. предварительная обработка данных) будут осуществлены над полученными исходными данными сканирования на основании усредненных данных фона и усредненных данных воздушной среды. Предварительно обработанное изображение обозначают через N(i, j). Расчет N(i, j) будет подробно пояснен ниже.
Вначале исходные данные сканирования предварительно обрабатывают на основании усредненных данных фона и усредненных данных воздушной среды. В частности, для каждого периода дискретизации i, T(i, j) будет рассчитано в соответствии со следующим уравнением:
 ;
;
где GMAX является максимальным уровнем серого, который может быть представлен на сканированном изображении, a и b представляют собой конфигурируемые константы, которые зависят от фактических случаев сканирования. Фактически, это является стандартным способом предварительной обработки исходных данных, при этом на получаемом сканированном изображении T(i, j) могут явно просматриваться поперечные полосы.
На основании T(i, j) для исходных данных сканирования, полученных в каждый период дискретизации, полученное сканированное изображение может быть сегментировано на занимаемую объектом область, в которой находится человеческое тело, и занимаемую воздушной средой область без человеческого тела (см. фиг. 5).
Во время сегментирования на области может быть использован заранее заданный порог t. В частности, области, которым присуще значение более t, относят к занимаемой воздушной средой области, а области, которым присуще значение менее t, относят к занимаемой объектом области. Альтернативно, могут быть использованы любые другие способы сегментирования изображения, такие как способ разделения по порогу, способ обнаружения краев, способ наращивания областей и т.п. Для каждого ряда i набор координат столбцов соответствующей занимаемой воздушной средой области может быть обозначен через Ai. То есть, во время сканирования i-го ряда исходных данных сканирования, в этих столбцах в наборе Ai не будет объекта, поглощающего рентгеновские лучи. Таким образом, соответствующие данные сканирования для этих столбцов должны рассматриваться в качестве данных воздушной среды, полученных в результате сканирования воздушной среды. Для этих столбцов в наборе Ai ряд ki, который является ближайшим к значению исходных данных сканирования, отыскивают из данных воздушной среды F(i, j):
 .
.
В случае набора Ai столбцов данных воздушной среды, значение i-го ряда исходных данных сканирования является ближайшим к значению ki-го ряда данных воздушной среды. Согласно настоящим вариантам осуществления расстояние между векторами измеряют с использованием евклидового расстояния. Альтернативно, в зависимости от конкретных ситуаций, расстояние между векторами может быть измерено другими способами, такими как расстояние городских кварталов, расстояние Чебышева и т.п. Здесь можно допустить, что, несмотря на механическую вибрацию и колебания данных, состояние всей системы при сканировании i-го ряда исходных данных сканирования является наиболее близким к состоянию при сканировании ki-го ряда данных воздушной среды. Таким образом, ki-го ряд данных воздушной среды может быть использован при коррекции i-го ряда исходных данных сканирования следующим образом:
 .
.
Описанный выше способ коррекции является более приемлемым, чем способ коррекции с использованием усредненных данных воздушной среды F(j), и способен удалить полосовые шумы, возникающие в результате применения последнего.
Следует отметить, что размер набора Ai является фактором, который влияет на эффект коррекции. Для того чтобы убедиться в том, что Ai содержит достаточное количество столбцов, ширина обнаруживаемого диапазона детектора может быть надлежащим образом увеличена или область сканирования может быть задана для обеспечения достаточного размера занимаемой воздушной средой области. Например, определенные области могут быть помечены либо на одной из сторон, либо на обеих сторонах туннелей сканирования. Эти области также находятся в пределах сканируемого и отображаемого объема, при этом в этих областях не предполагается наличие сканируемого объекта или других объектов (как показано на фиг. 6). Таким образом, сегментирование изображения может быть опущено, и часть изображения, соответствующая этим областям, в которых не включается наличие объекта, может непосредственно рассматриваться в качестве занимаемой воздушной средой области.
Пример 2
Рассмотрим фиг. 7, на которой изображен пример 2 настоящего изобретения, представляющий систему рентгеновского сканирования, которая содержит:
генератор 71 рентгеновского излучения, адаптированный для испускания рентгеновских лучей;
детектор 72, который остается неподвижным относительно генератора рентгеновского излучения и адаптирован для сбора детекторных сигналов рентгеновских лучей; и
процессор 73, связанный с детектором 72 и адаптированный для обработки детекторных сигналов рентгеновских лучей, собранных детектором 72, при этом указанная обработка включает:
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения не испускает рентгеновских лучей, в качестве данных фона;
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения испускает рентгеновские лучи и сканируемый объект отсутствует в исследуемом канале, в качестве данных воздушной среды;
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения испускает рентгеновские лучи для сканирования объекта, в качестве исходных данных сканирования; и
предварительную обработку исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Кроме того, для того чтобы отсканировать проверяемый объект, остающийся относительно стационарным, как генератор 71 рентгеновского излучения, так и детектор 72 могут быть установлены на фиксированной опоре 74 и перемещены при помощи приводного устройства. Следовательно, в процессе сканирования генератор 71 рентгеновского излучения и детектор 72 могут быть перемещены вдоль вертикального направления относительно плоскости испускаемых пучков, при этом генератор 71 рентгеновского излучения остается неподвижным относительно детектора 72.
Предпочтительно, процессор 73 дополнительно адаптирован для следующего:
усреднение данных фона для получения усредненных данных фона; и/или
усреднение данных воздушной среды для получения усредненных данных воздушной среды.
Предпочтительно, указанная система может также содержать коллиматор 75, который закреплен на оптическом пути между генератором 71 рентгеновского излучения и детектором 72, при этом коллиматор 75 остается неподвижным относительно генератора 71 рентгеновского излучения и детектора 72 и адаптирован для придания параллельности рентгеновским лучам, испускаемым генератором 71 рентгеновского излучения.
Предпочтительно, процессор 73 дополнительно адаптирован для следующего:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
Предпочтительно, процессор 73 дополнительно адаптирован для следующего:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта при помощи заранее заданного порога.
Предпочтительно, процессор 73 дополнительно адаптирован для следующего: сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта при помощи способа разделения по порогу, способа обнаружения краев или способа наращивания областей.
Предпочтительно, процессор 73 дополнительно адаптирован для следующего: определение некоторой подобласти из области сканирования, в которой не включается наличие объекта, в качестве занимаемой воздушной средой области, и определение остальной части области сканирования в качестве занимаемой объектом области; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
На фиг. 8 изображено сканированное изображения, полученное после рентгеновского сканирования и обработки данных для статического объекта с использованием способа рентгеновского сканирования и системы сканирования в соответствии с вариантами осуществления настоящего изобретения. При сравнении изображений, представленных на фиг. 8 и фиг. 1, очевидно, что полосовой шум, появляющийся в пустой области с левой стороны, а также в занимаемой сканированным объектом области с правой стороны изображения на фиг. 1, был эффективно ослаблен и устранен из изображения на фиг. 8.
Таким образом, при осуществлении рентгеновского сканирования неподвижного объекта, способ рентгеновского сканирования и система сканирования в соответствии с вариантами осуществления настоящего изобретения осуществляют измерение данных фона и данных воздушной среды, а также обработку данных сканирования, решая проблему шума, вызванного механической вибрацией, и улучшая точность измерения.
Следует отметить, что приведенные выше варианты осуществления представлены исключительно для иллюстрации технических решений согласно настоящему изобретению, и они не предназначены для ограничения объема настоящего изобретения. Специалисту в данной области техники будет понятно, что, хотя настоящее изобретение было подробно описано со ссылками на приведенные выше варианты осуществления, модификации технических решений, описанных в приведенных выше вариантах осуществления, или эквивалентные изменения некоторых технических признаков в указанных решениях могут быть выполнены без отступления от сути и объема технических решений согласно настоящему изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕРЕОСКОПИЧЕСКАЯ КОМПЬЮТЕРНАЯ ТОМОГРАФИЯ | 2007 |
|
RU2429467C2 |
| СКАНИРОВАНИЕ В СКВОЗНОМ РЕЖИМЕ | 2007 |
|
RU2452384C2 |
| РАДИОГРАФИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2312327C2 |
| УСТРОЙСТВО И СПОСОБ ДОСМОТРА ОБЪЕКТОВ | 2005 |
|
RU2444723C2 |
| СОКРАТИТЕЛЬ РЕНТГЕНОВСКОГО ПОТОКА ДЛЯ ДЕТЕКТОРА ПОДСЧЕТА ФОТОНОВ | 2015 |
|
RU2699280C2 |
| ДЕТЕКТОР ДЛЯ ПОДСЧЕТА ФОТОНОВ | 2012 |
|
RU2594602C2 |
| СПЕКТРАЛЬНАЯ КОМПЬЮТЕРНАЯ ТОМОГРАФИЯ | 2009 |
|
RU2505268C2 |
| СИСТЕМА КОНТРОЛЯ АВИАЦИОННЫХ ГРУЗОВ ИЛИ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2291415C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ ВИЗУАЛИЗАЦИИ МЕТОДОМ НИЗКОДОЗОВОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2011 |
|
RU2571564C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛЕВОГО ОБЪЕКТА | 2018 |
|
RU2781347C2 |
Группа изобретений относится к медицинской технике, а именно к средствам рентгеновского сканирования. Способ, включающий сбор данных фона без испускания рентгеновских лучей, сбор данных воздушной среды при испускании рентгеновских лучей и без сканируемого объекта в исследуемом канале, сканирование объекта для сбора исходных данных сканирования, и предварительную обработку исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, где стадия предварительной обработки исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, дополнительно включает сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования, и поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения. Система содержит генератор рентгеновского излучения, адаптированный для испускания рентгеновских лучей, детектор, который остается неподвижным относительно генератора рентгеновского излучения и адаптирован для сбора детекторных сигналов рентгеновских лучей, и процессор, связанный с детектором и адаптированный для обработки детекторных сигналов рентгеновских лучей, собранных детектором, при этом указанная обработка включает применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения не испускает рентгеновских лучей, в качестве данных фона, применение детекторных сигналов, когда генератор рентгеновского излучения испускает рентгеновские лучи и сканируемый объект отсутствует в исследуемом канале, в качестве данных воздушной среды, применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения испускает рентгеновские лучи для сканирования объекта, в качестве исходных данных сканирования, и предварительную обработку исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения. Использование изобретений позволяет снизить влияние шума, вызванного механической вибрацией на получение изображения. 2 н. и 10 з.п. ф-лы, 8 ил.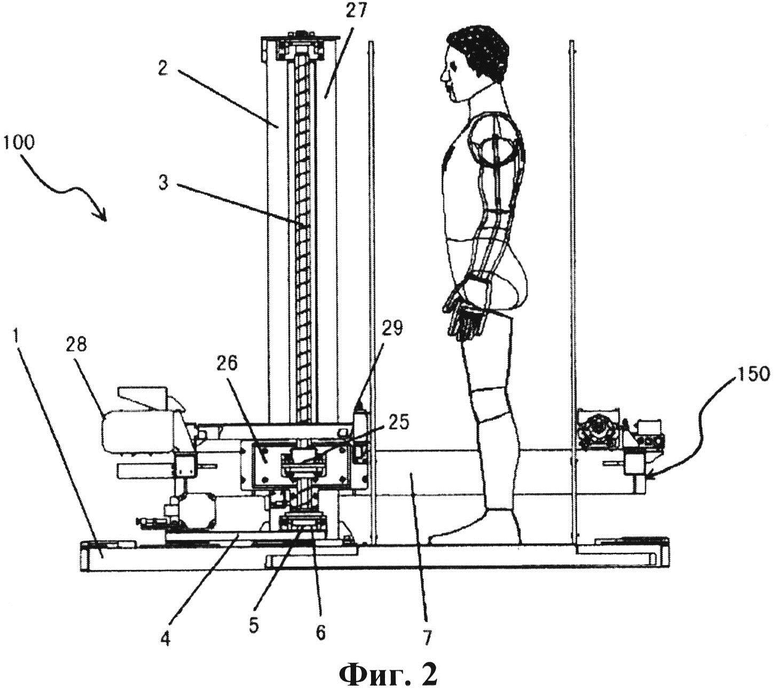
1. Способ рентгеновского сканирования, включающий:
сбор данных фона без испускания рентгеновских лучей;
сбор данных воздушной среды при испускании рентгеновских лучей и без сканируемого объекта в исследуемом канале;
сканирование объекта для сбора исходных данных сканирования; и
предварительную обработку исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, где
стадия предварительной обработки исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, дополнительно включает:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
2. Способ рентгеновского сканирования по п. 1, где стадия сбора данных фона дополнительно включает:
усреднение данных фона для получения усредненных данных фона.
3. Способ рентгеновского сканирования по п. 1, где стадия сбора данных воздушной среды дополнительно включает:
усреднение данных воздушной среды для получения усредненных данных воздушной среды.
4. Способ рентгеновского сканирования по п. 1, где стадия сегментирования области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования включает:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта посредством использования заранее заданного порога.
5. Способ рентгеновского сканирования по п. 1, где стадия сегментирования области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования включает:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта посредством использования способа разделения по порогу, способа обнаружения краев или способа наращивания областей.
6. Способ рентгеновского сканирования по любому из пп. 1-3, где стадия предварительной обработки исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, дополнительно включает:
определение подобласти из области сканирования, в которой не допускается размещение объекта, в качестве занимаемой воздушной средой области, и определение остальной части области сканирования в качестве занимаемой объектом области; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
7. Система рентгеновского сканирования, содержащая:
генератор рентгеновского излучения, адаптированный для испускания рентгеновских лучей;
детектор, который остается неподвижным относительно генератора рентгеновского излучения и адаптирован для сбора детекторных сигналов рентгеновских лучей; и
процессор, связанный с детектором и адаптированный для обработки детекторных сигналов рентгеновских лучей, собранных детектором, при этом указанная обработка включает:
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения не испускает рентгеновских лучей, в качестве данных фона;
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения испускает рентгеновские лучи и сканируемый объект отсутствует в исследуемом канале, в качестве данных воздушной среды;
применение детекторных сигналов, собранных детектором, когда генератор рентгеновского излучения испускает рентгеновские лучи для сканирования объекта, в качестве исходных данных сканирования; и
предварительную обработку исходных данных сканирования на основании данных фона и данных воздушной среды с тем, чтобы получить данные сканированного изображения, где
процессор дополнительно адаптирован для следующего:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта на основании исходных данных сканирования; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
8. Система рентгеновского сканирования по п. 7, где процессор дополнительно адаптирован для следующего:
усреднение данных фона для получения усредненных данных фона; и/или
усреднение данных воздушной среды для получения усредненных данных воздушной среды.
9. Система рентгеновского сканирования по п. 7, дополнительно содержащая:
коллиматор, который закреплен на оптическом пути между генератором рентгеновского излучения и детектором, при этом коллиматор остается неподвижным относительно генератора рентгеновского излучения и детектора и адаптирован для придания параллельности рентгеновским лучам, испускаемым генератором рентгеновского излучения.
10. Система рентгеновского сканирования по п. 7, где процессор дополнительно адаптирован для следующего:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта при помощи заранее заданного порога.
11. Система рентгеновского сканирования по п. 7, где процессор дополнительно адаптирован для следующего:
сегментирование области сканирования на занимаемую объектом область, внутри которой находится объект, и занимаемую воздушной средой область без объекта при помощи способа разделения по порогу, способа обнаружения краев или способа наращивания областей.
12. Система рентгеновского сканирования по любому из пп. 7-9, где процессор дополнительно адаптирован для следующего:
определение подобласти из области сканирования, в которой не допускается размещение объекта, в качестве занимаемой воздушной средой области, и определение остальной части области сканирования в качестве занимаемой объектом области; и
поиск данных воздушной среды для конкретных данных воздушной среды, ближайших к значению исходных данных сканирования для занимаемой воздушной средой области, и осуществление коррекции усиления для исходных данных сканирования на основании данных фона и ближайших данных воздушной среды с тем, чтобы получить данные сканированного изображения.
| CN 102567960 A, 11.07.2012 | |||
| WO 9202892 A1, 20.02.1992 | |||
| US 5949842 A, 07.09.1999 | |||
| СПОСОБ РЕНТГЕНОВСКОГО КОНТРОЛЯ ТЕЛА (ВАРИАНТЫ) И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2261465C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДОСМОТРА ОБЪЕКТА | 2006 |
|
RU2418291C2 |

