Область техники, к которой относится изобретение
Изобретение, в общем, имеет отношение к системам досмотра, основанным на дистанционной регистрации проникающего излучения, рассеиваемого досматриваемым объектом.
Уровень техники
Рассеяние рентгеновских лучей может быть применено для досмотра персонала, транспортных средств, груза и других интересующих объектов. Термин "объект" используется здесь исключительно, чтобы охватить любой из вышеупомянутых. В системах, применяющих рассеяние рентгеновских лучей, рентгеновские лучи формируются в луч, который направлен к интересующему объекту. Когда луч попадает на объект, рентгеновские лучи рассеяния улавливаются детекторами рентгеновских лучей, и различные характеристики объекта рассеивания могут быть определены или в целом, или относительно пиксилизированного изображения объекта.
Разрешение информации, получаемой об объекте или персоне запроса, зависит от множества факторов, включая расстояние между системой досмотра и объектом, и величину и энергию спектра потока рентгеновских лучей. В существующих системах, когда расстояние между рентгеновской системой и объектом увеличивается, или когда поток уменьшается, разрешение изображения и качество (которое проявляется в соотношении сигнал-шум, например) снижается. Снижение качества, по существу, вызывается уменьшением потока обратного рассеяния, улавливаемого детекторами. В существующих системах рентгеновского изображения обратного рассеяния детекторы располагаются вблизи источника рентгеновских лучей, обеспечивая комбинированные системы источника и детекторов, находящиеся так близко, как это возможно, к досматриваемому объекту. Близость системы к объекту создает высококачественное изображение без необходимости в интенсивном потоке рентгеновских лучей. Однако существует множество применений, в особенности применений в безопасности и разведке наблюдением, где большее расстояние между системой изображения и объектом, который должен досматриваться, было бы желательным. Одним таким применением является то, где персонал, который должен досматриваться, может переносить взрывные устройства, переносимые под одеждой или скрытые в рюкзаках или сумках, и присутствует риск взрыва с самоубийством. Бомбометание с самоубийством часто влекло за собой большое количество металлической шрапнели, уложенной вокруг взрывчатого вещества, для увеличения летальности устройства, обычно гаек, гвоздей или шарикоподшипников.
Существующие системы рентгеновского досмотра часто не подходят для таких применений и редко используются в применениях, требующих расстояния больше, чем пять футов. Существующие системы могут препятствовать снижению качества изображения увеличением размера детекторов или использованием источников интенсивного потока рентгеновских лучей. Однако если расстояние слишком велико, потребуются невозможно большие детекторы. Дополнительно, когда поток увеличивается, объекты будут подвергаться воздействию излучения, что представляет проблему, когда объекты являются или могут содержать личность.
Один возможный вариант досмотра обратного рассеяния для подвижного досмотра транспортного средства раскрыт в Патенте США №7,099,434, Адаме и др., опубликованном 29 августа 2006 и включенном здесь посредством ссылки. Варианты осуществления этого изобретения могут быть высокоэффективны при обнаружении большого количества взрывчатых веществ или других органических веществ в транспортных средствах или других емкостях. Единственным соображением, однако, является то, что металлические объекты (такие, какартиллерийские снаряды) в металлических емкостях (таких, как транспортное средство) могут хорошо не обнаруживаться, пока подходяще не вырисуются на ярком рассеивающем фоне органического вещества.
Другие проблемы технологии обратного рассеяния таковы, что может иногда быть трудным получить изображение органических веществ, когда они расположены в или за значительными количествами вещества с большим атомным номером, такого как сталь. Примером этого может быть малое количество взрывчатого вещества, скрытое в багажнике транспортного средства. Поскольку рентгеновские лучи обратного рассеяния обычно регистрируются в обратном направлении (углы рассеяния обычно находятся в диапазоне 140°<Θ<180°), среднее значение энергии рентгеновских лучей рассеяния довольно низкое (приблизительно 68 кэВ для первичного рентгеновского луча от 225 кВ источника рентгеновских лучей). Эти рентгеновские лучи низкой энергии затем сильно ослабляются стальным корпусом транспортного средства, что приводит к сильно уменьшенному числу рентгеновских лучей рассеяния, регистрируемых в детекторах обратного рассеяния. Эта проблема часто усиливается, поскольку рассеянные рентгеновские лучи достигают детекторов обратного рассеяния, пройдя через мешающую стальную поверхность под острым углом, что приводит к тому, что эффективная толщина стали больше, чем действительный размер стали.
Раскрытие изобретения
Представленные варианты осуществления настоящего изобретения включают систему и способ досмотра объекта. Объект освещается сведенным в параллельный пучок лучом проникающего излучения. Регистрируется излучение обратного рассеяния от луча.
Показатели излучения обратного рассеяния сравниваются с предполагаемыми опорными значениями. На основе сравнения определяется описательная категория, которая характеризует объект.
В дополнительных вариантах осуществления проникающее излучение может быть рентгеновским излучением. Описательная категория может, например, показывать ненормально высокое металлическое содержимое, когда показатели ниже, чем предполагаемые опорные значения, или ненормально высокое органическое содержимое, когда показатели выше, чем предполагаемые опорные значения. Описательная категория может показывать потенциальную или подтвержденную угрозу безопасности в соответствии с предварительно установленным критерием угрозы безопасности.
В некоторых вариантах осуществления способ может дополнительно включать выбор объекта для освещения. Он может быть основан, например, на оптической или неоптической разведке наблюдением интересующей зоны. Способ может также включать определение предполагаемых опорных значений, основанное на освещении местного ориентира проникающим излучением.
Варианты осуществления настоящего изобретения также включают системы и устройства, адаптированные к применению любых вышеупомянутых способов.
В соответствии с другим аспектом настоящего изобретения предусмотрены система и способ досмотра объекта досмотра проникающим излучением. Луч проникающего излучения создается скрытым источником и сканирует поперек объекта при изменяющемся во времени направлении луча. Проникающее излучение, рассеиваемое объектом, регистрируется скрытым детектором пропускания, и создается сигнал прямого пропускания. Определяется специфическая характеристика содержимого объекта, основанная, частично, на сигнале прямого пропускания.
В дополнительном варианте осуществления детектор пропускания включает одну или более линейную секцию, например L-образный детектор имеет вертикальную секцию и горизонтальную секцию. И детектор пропускания может быть включен в конструкцию лежачего полицейского.
Другой представленный вариант осуществления настоящего изобретения включает систему и способ для досмотра объекта досмотра проникающим излучением, вновь сформированным в луч, который сканирует поперек объекта при изменяющемся во времени направлении луча. Проникающее излучение, рассеиваемое объектом, регистрируется детектором прямого рассеяния, и создается сигнал прямого рассеяния. Определяется специфическая характеристика содержимого объекта, основанная, частично, на сигнале прямого рассеяния.
Дополнительные варианты осуществления включают комбинацию детектора прямого пропускания и детектора прямого рассеяния в одной системе. При таком выполнении сигнал прямого пропускания и сигнал прямого рассеяния комбинируются для создания улучшенного изображения рассеяния и/или улучшенного изображения пропускания. Любое из созданных изображений может быть отображено оператору. Любой или все детекторы могут быть включены в конструкцию лежачего полицейского.
Варианты осуществления также включают улучшенную систему досмотра типа использования ограждения, в котором скрыты источник проникающего излучения, имеющий луч, который имеет возможность сканирования, по меньшей мере, вдоль первой плоскости, и детектор, который реагирует на энергию обратного рассеяния луча от объекта, являющегося досматриваемым. Улучшение включает модуль детектора пропускания для регистрации энергии излучения, которое было пропущено через объект, являющийся досматриваемым, такой модуль является физически отделенным от ограждения и размещаемым на дороге.
Дополнительные варианты осуществления включают улучшенную систему досмотра типа использования ограждения, в котором скрыты источник проникающего излучения, имеющий луч, который имеет возможность сканирования, по меньшей мере, вдоль одной плоскости, и детектор, который реагирует на энергию обратного рассеяния луча от объекта, являющегося досматриваемым. Улучшение включает модуль детектора прямого рассеяния для регистрации энергии излучения, которое было рассеяно в прямом направлении объектом, являющимся досматриваемым, такой модуль является физически отделенным от ограждения и применяемым на дороге.
Варианты осуществления также включают улучшенную систему досмотра типа использования ограждения, в котором скрыты источник проникающего излучения, имеющий луч, который имеет возможность сканирования, по меньшей мере, вдоль первой плоскости, и детектор, который реагирует на энергию обратного рассеяния луча от объекта, являющегося досматриваемым. Улучшение включает наклонный модуль, помещающий горизонтальную часть модуля детектора пропускания для регистрации энергии излучения, которое было пропущено через объект, являющийся досматриваемым, и, по меньшей мере, один детектор прямого рассеяния для регистрации энергии излучения, которое было рассеяно в прямом направлении объектом, являющимся досматриваемым, такой модуль является физически отделенным от ограждения и применяемым на дороге.
В любом из вышеупомянутого ограждение может образовывать внешнюю часть транспортного средства, имеющего возможность передвижения по дороге. Или ограждение может быть морским контейнером повышенной прочности.
В соответствии с другими предпочтительными вариантами осуществления настоящего изобретения предусмотрена система досмотра для досмотра объекта, система досмотра имеет источник проникающего излучения, размещенный и спроектированный так, чтобы досматриваемое поле наблюдения было меньше, чем 0,1 стерадиан (ср). Пространственный модулятор формирует проникающее излучение в луч для облучения объекта, являющегося досматриваемым. Предусмотрен детектор, отделенный от источника проникающего излучения, размещенный относительно объекта так, чтобы стянуть больше, чем 0,5 ср, в поле наблюдения объекта.
В различных вариантах осуществления источник проникающего излучения может быть рентгеновской трубкой. Альтернативно, источник излучения может быть гамма-рентгеновским лучом. Пространственный модулятор может включать один или более вращающийся отсекатель в виде диска с отверстиями.
В соответствии с одним вариантом осуществления настоящего изобретения источник проникающего излучения может быть расположен в центре комнаты, и ряд переносных детекторов расположен возле стен комнаты. Альтернативно, источник проникающего излучения может быть расположен в смежной комнате, а детекторы включены в стены комнаты или расположены в смежных комнатах.
В соответствии с дополнительными вариантами осуществления настоящего изобретения источник проникающего излучения, детектор, или оба, могут быть расположены на одном или более транспортном средстве, включая роботизированные дистанционно управляемые самодвижущиеся транспортные средства, имеющие возможность передвижения по дороге. Источник проникающего излучения может быть закреплен на шарнирном креплении для обеспечения луча, который должен быть направлен на объекты в различном расположении. Система досмотра может дополнительно включать систему стабилизации для минимизации дрожания, когда транспортное средство пересекает неровную почву.
В еще дополнительных вариантах осуществления настоящего изобретения детекторы могут быть расположены в земле или потолке галереи и могут быть замаскированы. Детекторы, расположенные в земле, могут дополнительно включать конструктивные опоры для предотвращения повреждения детектора, когда объект проходит над ним, и датчики давления для регистрации присутствия объекта.
Краткое описание чертежей
Вышеупомянутые признаки изобретения будет легче понять посредством отсылки к следующему подробному описанию, данному со ссылкой на сопровождающие чертежи, приведенные здесь.
Фиг.1 показывает различные функциональные элементы в соответствии со специфическим вариантом осуществления настоящего изобретения.
Фиг.2 и 3 показывают аспекты различных схем калибровки сигнала, которые используются в специфических вариантах осуществления.
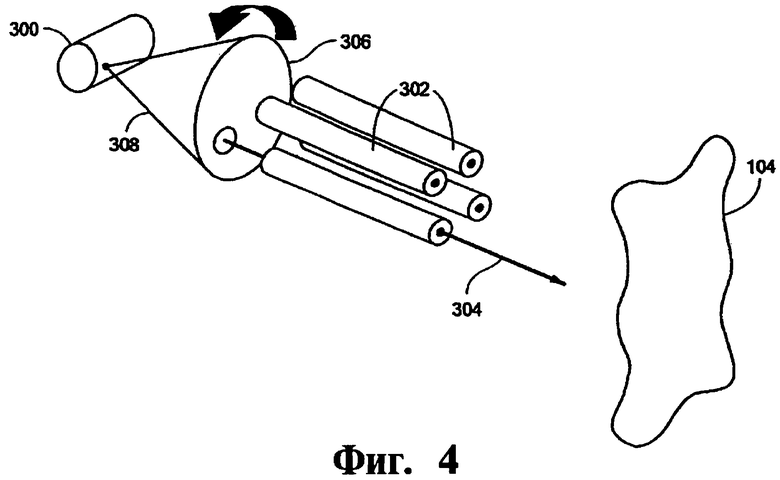
Фиг.4 показывает подробности варианта осуществления, в котором несколько точек запроса быстро установлено.
Фиг.5 показывает детектор пропускания, расположенный на удаленной стороне транспортного средства, являющегося изображаемым в соответствии с одним вариантом осуществления настоящего изобретения.
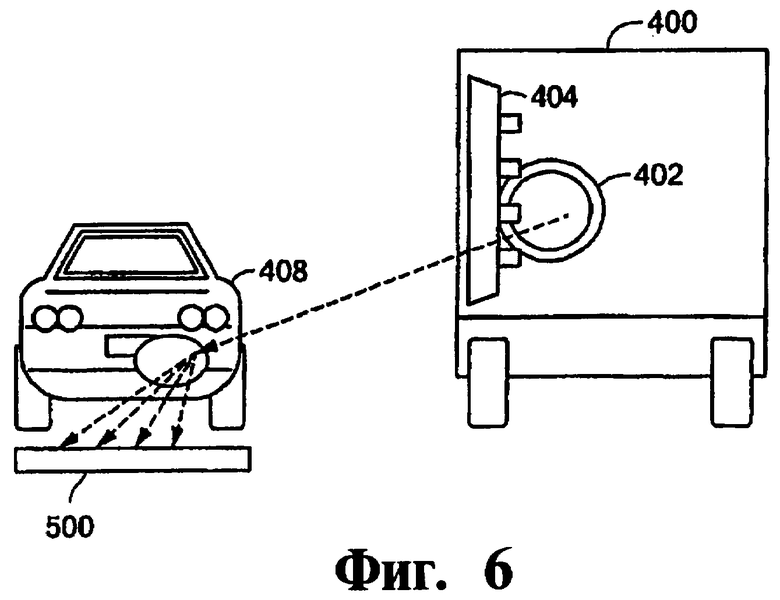
Фиг.6 показывает детектор прямого рассеяния, расположенный внизу транспортного средства для получения изображения в соответствии с одним вариантом осуществления настоящего изобретения.
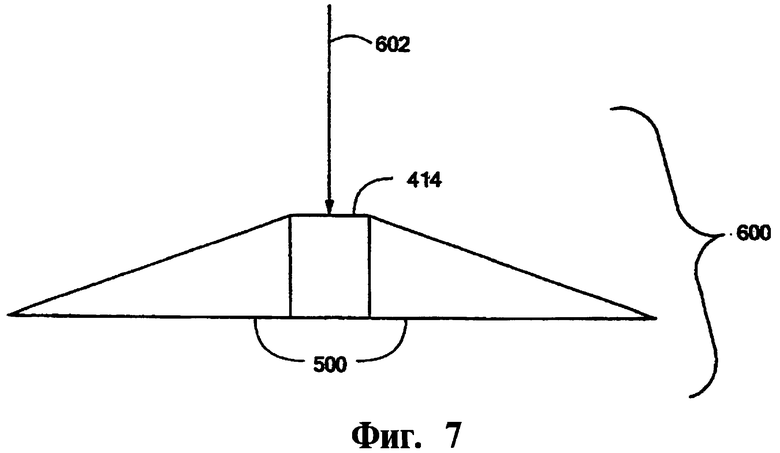
Фиг.7 показывает включение горизонтальной секции детектора пропускания и детекторов прямого рассеяния в быстро размещаемого "лежачего полицейского" в соответствии с одним вариантом осуществления настоящего изобретения.
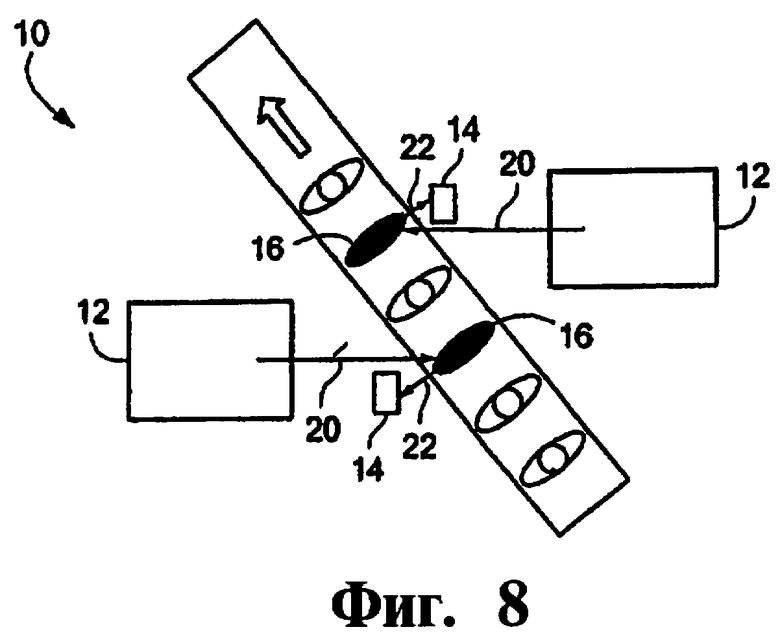
Фиг.8 показывает систему досмотра, предназначенную для досмотра персонала.
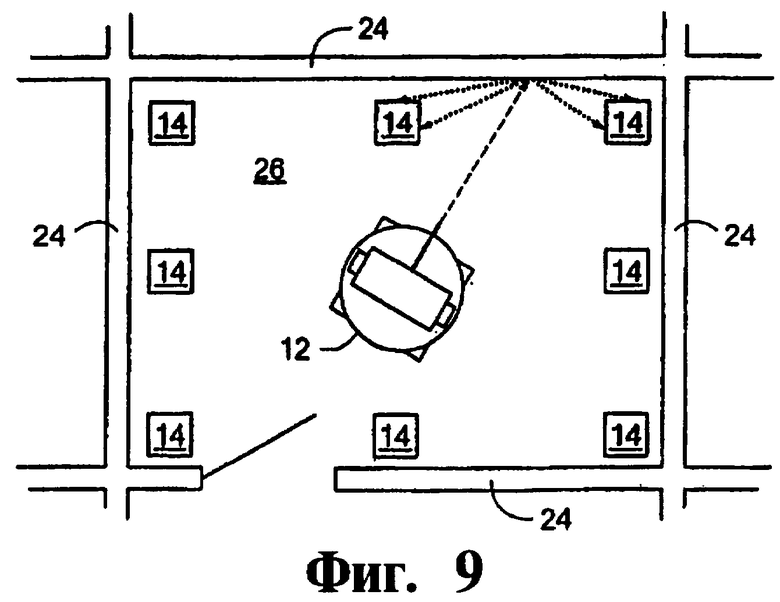
Фиг.9 показывает систему досмотра, предназначенную для досмотра стен зданий для иностранных объектов.
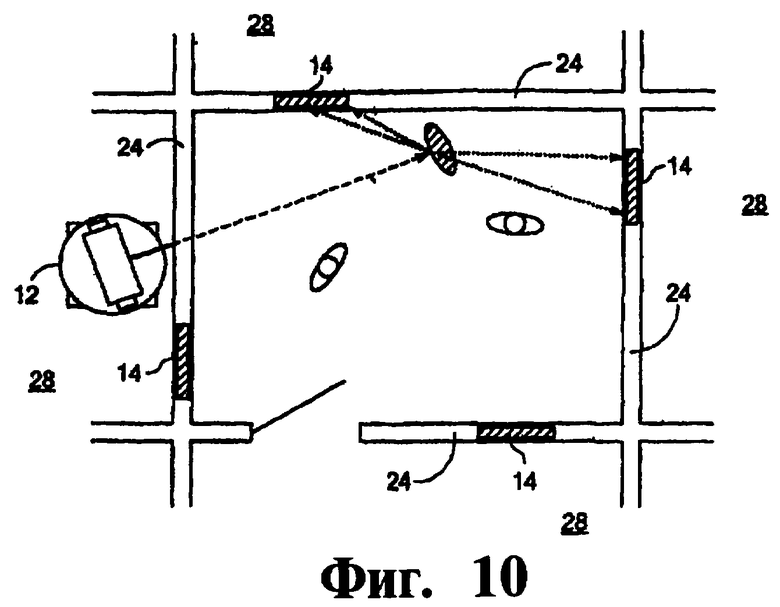
Фиг.10 показывает систему досмотра, предназначенную для определения местоположения людей в смежной комнате с детекторами, включенными в стены комнаты.
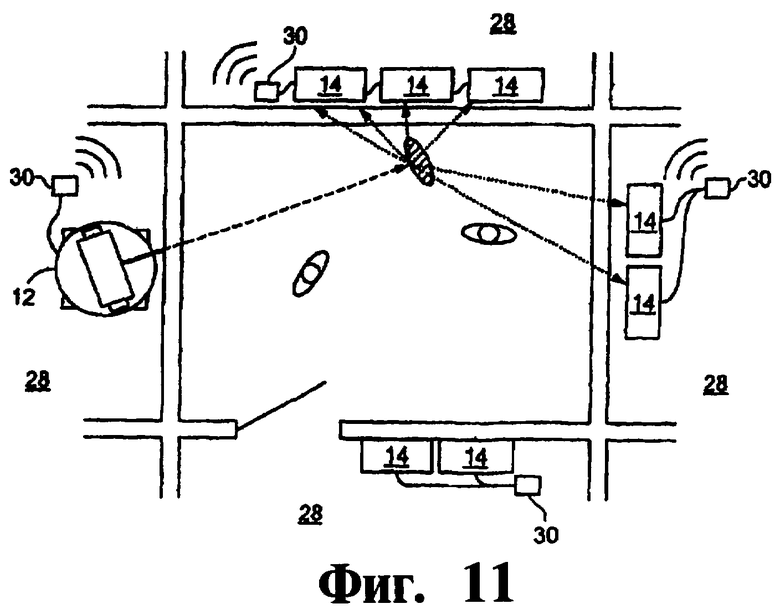
Фиг.11 показывает систему досмотра, предназначенную для определения местоположения людей в смежной комнате с детекторами, расположенными в комнатах, смежных с интересующей комнатой.
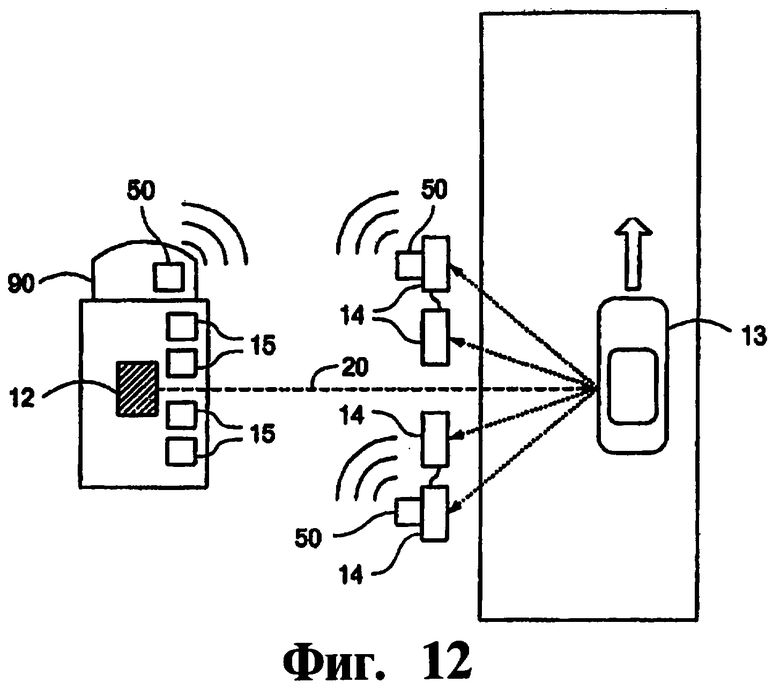
Фиг.12 показывает систему досмотра, предназначенную для увеличения дальности действия существующих систем досмотра посредством повторного размещения детекторов ближе к объекту, являющемуся досматриваемым.
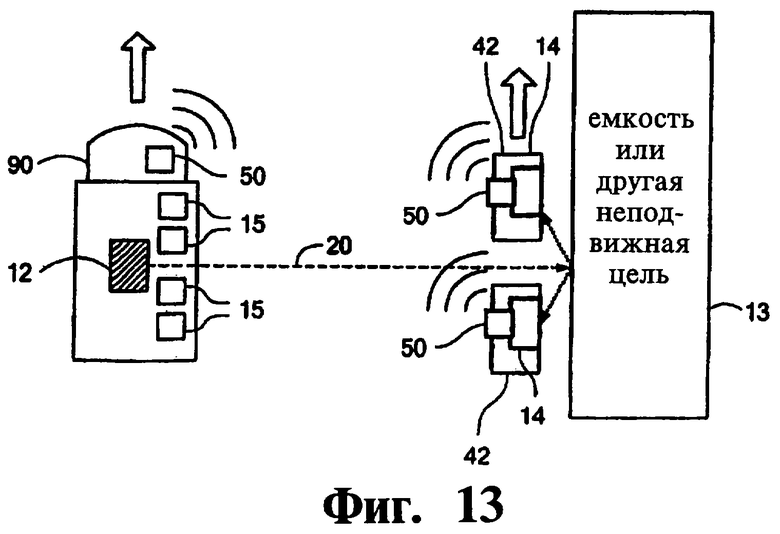
Фиг.13 показывает систему досмотра с источником проникающего излучения и детекторами, расположенными на транспортном средстве, имеющем возможность передвижения по дороге.
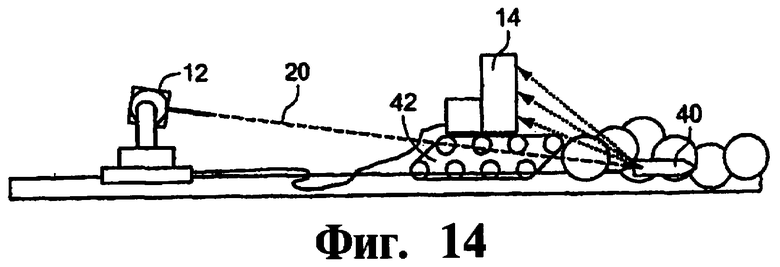
Фиг.14 показывает систему досмотра, предназначенную для досмотра возможных СВУ с детектором, расположенным на роботе прямого применения.
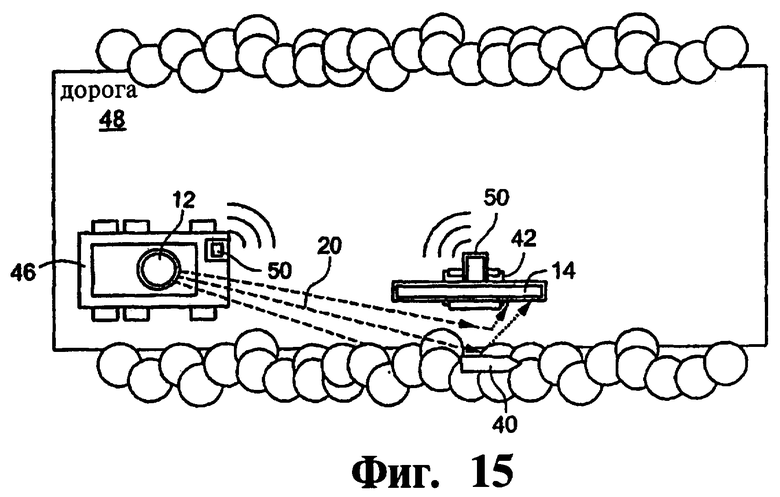
Фиг.15 показывает вид сверху системы досмотра с источником проникающего излучения, закрепленным на шарнирном креплении на транспортном средстве, имеющем возможность передвижения по дороге, и детектором, закрепленным на роботизированном дистанционно управляемом самодвижущемся транспортном средстве.
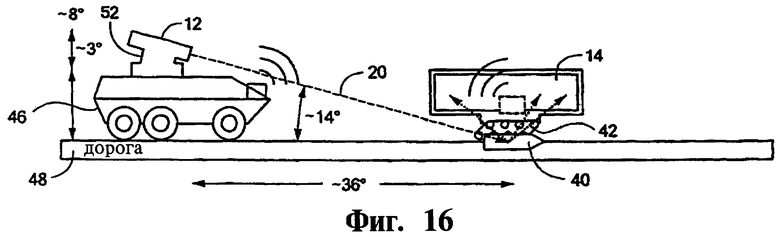
Фиг.16 показывает вид сбоку системы досмотра с источником проникающего излучения, закрепленным на шарнирном креплении на транспортном средстве, имеющем возможность передвижения по дороге, и детектором, закрепленным на роботизированном дистанционно управляемом самодвижущемся транспортном средстве.
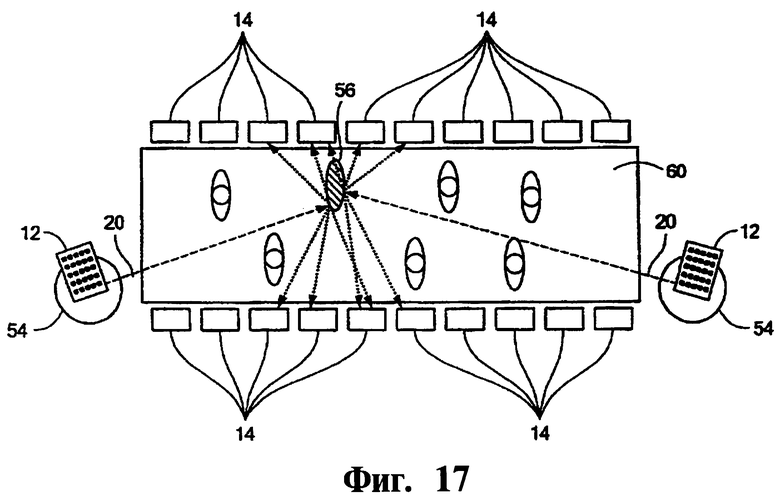
Фиг.17 показывает систему досмотра подозрительных путешественников с источником рентгеновских лучей, закрепленном в потолке.
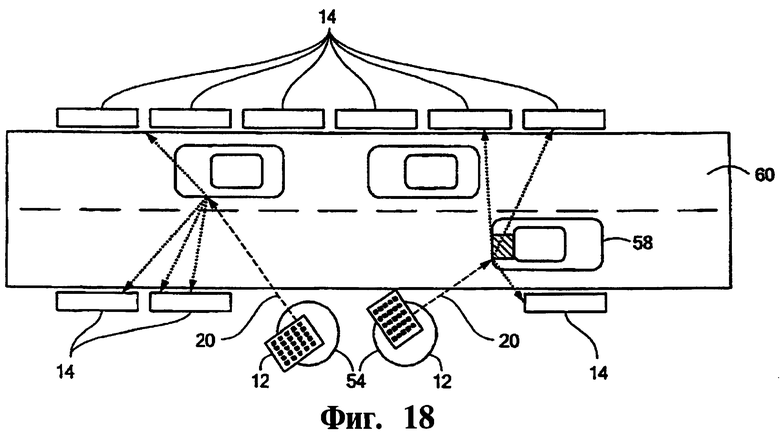
Фиг.18 показывает систему досмотра проходящих машин с детекторами, расположенными вдоль дороги, и источником рентгеновских лучей, закрепленным над дорогой.
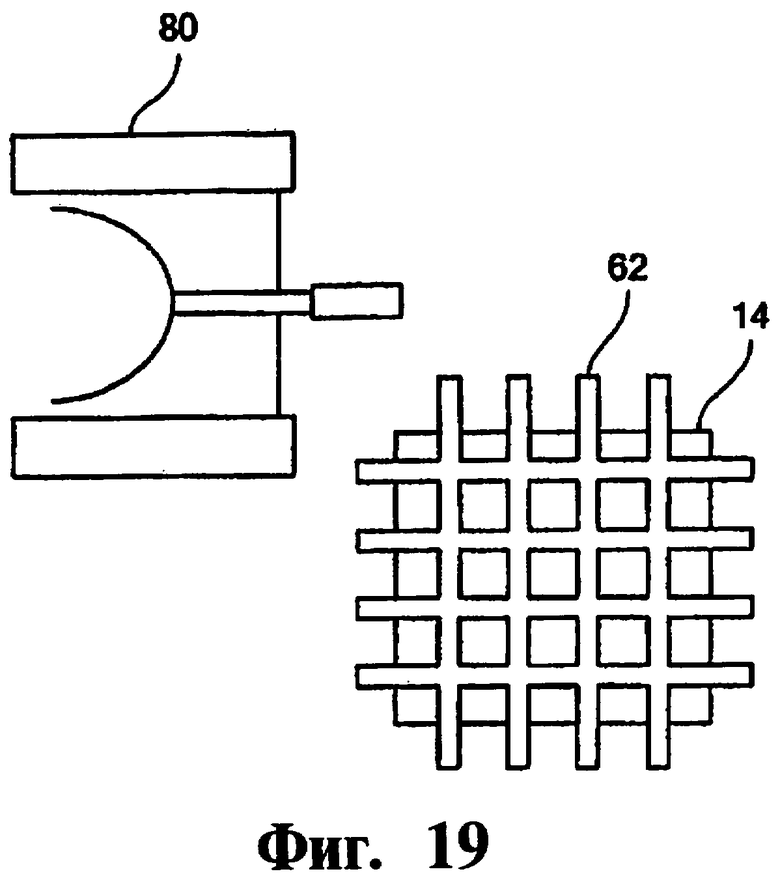
Фиг.19 показывает вид сверху детектора, расположенного в земле с конструктивной опорой.
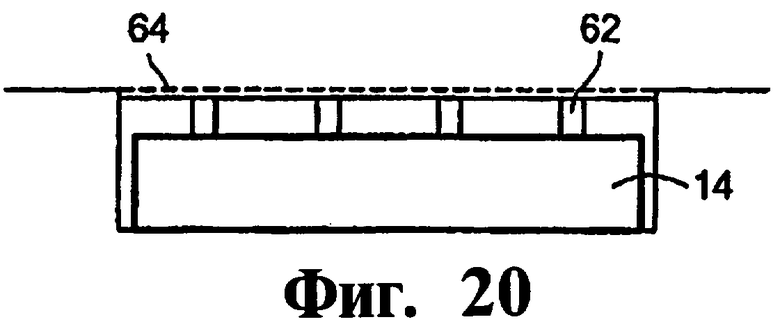
Фиг.20 показывает вид сбоку детектора, расположенного в земле с конструктивной опорой и слоем камуфляжа.
Фиг.21 показывает вид сбоку системы досмотра с группой детекторов, расположенных в земле, окружающих источник рентгеновских лучей.
Фиг.22 показывает вид сверху системы досмотра с группой детекторов, расположенных в земле, окружающих источник рентгеновских лучей.
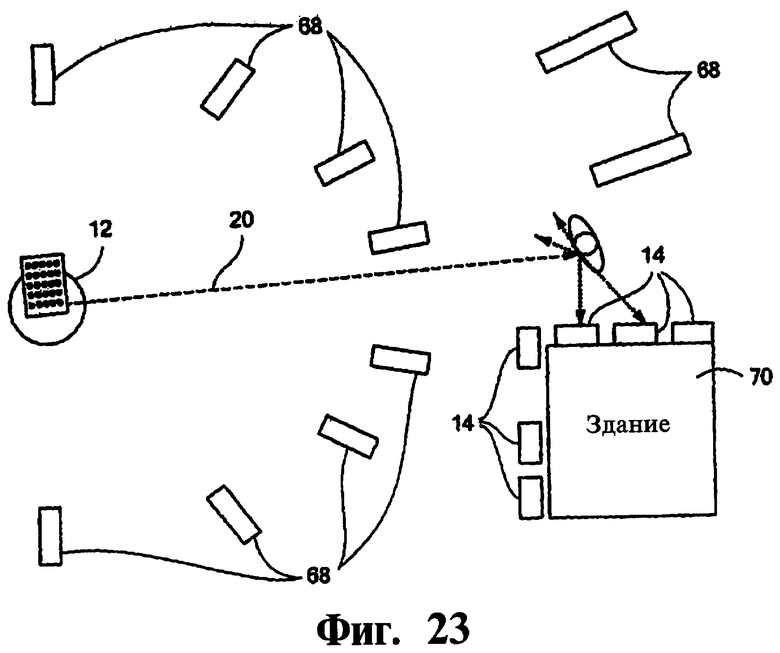
Фиг.23 показывает вид сверху системы досмотра, где детекторы находятся в свободном монолитном расположении.
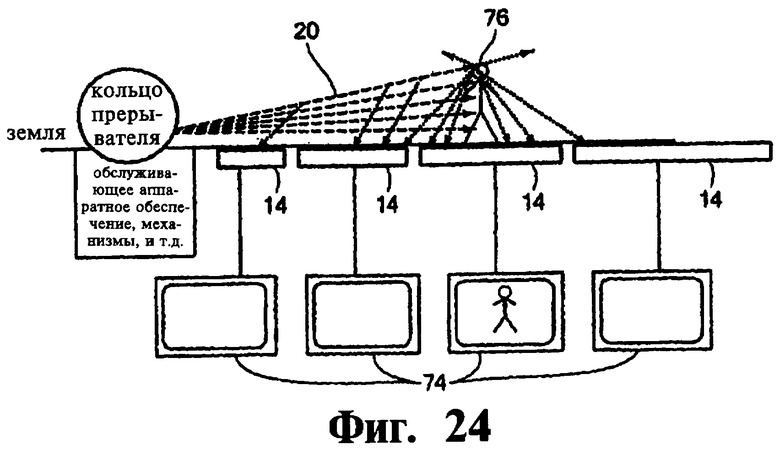
Фиг.24 показывает систему досмотра, в которой сигналы от детекторов на разных расстояниях разделяются.
Осуществление изобретения
Дистанционная регистрация обратного рассеяния
Варианты осуществления настоящего изобретения (которые могут быть названы "Z-Radar"™) раскрыты со ссылкой на фиг.1. В системе досмотра обратного рассеяния, изображенной, в общем, под цифрой 100, используется сведенный в параллельный пучок луч 102 проникающего излучения, такого как рентгеновские лучи, для освещения объекта 104 (который, как показано выше, может включать личность) на относительно больших расстояниях, для определения, например, металлического содержимого на или в объекте. Объект, который будет упомянут, должен быть расположен на "большом расстоянии", если объект досмотра, или релевантная часть его, стягивает угол меньше, чем 5°, в любом направлении, которое рассмотрено от источника освещения. Проникающее излучение может также включать, например, волны в других частях электромагнитного спектра, такие как гамма-лучи, но будет здесь иметь отношение к рентгеновским лучам, без намерения потери универсальности. Когда проникающее излучение включает рентгеновские лучи, рентгеновские лучи могут быть созданы источником рентгеновских лучей, таким как рентгеновская трубка.
Проникающее излучение 106, рассеиваемое объектом досмотра, регистрируется в детекторах рентгеновских лучей большой зоны 108, и сигнал, создаваемый детекторами 108, сравнивается, посредством контроллера 112, с предполагаемым сигналом от органических объектов, освещаемых рентгеновскими лучами на одном расстоянии. Объекты, содержащие металлы, абсорбируют рентгеновские лучи, что вызывает сигнал обратного рассеяния, который ниже, чем предполагаемый сигнал от чисто органического объекта.
Объекты досмотра могут включать, без ограничения, людей или любые объекты, которые состоят главным образом из органического вещества, на или в которых желательно определение металлического содержимого. Например, может быть обнаружена металлическая шрапнель, используемая бомбометателями-самоубийцами для максимизации летальности от взрыва, являющаяся переносимой, или может быть обнаружено присутствие металлических боеприпасов, таких как ружья и ножи.
В некоторых вариантах осуществления сначала система, использующая одну или более видеокамер, определяет местоположение и отслеживает объект, который должен быть досмотрен, хотя любые другие оптические или неоптические средства могут также быть применены в рамках изобретения. Фиг.1 показывает различные функциональные элементы в соответствии со специфическим вариантом осуществления настоящего изобретения. Видеокамеры 114 системы оптической разведки наблюдением контролируют интересующую зону. Регулируемый источник рентгеновских лучей 110 закреплен на основании 116, которое поворачивается и преобразовывает положение проникающего рентгеновского луча, создаваемого рентгеновской трубкой 110. Детекторы обратного рассеяния 108 регистрируют рентгеновские лучи обратного рассеяния 106 от объекта-цели 104, являющегося освещенным. Система видеослежения может быть использована для наведения рентгеновского луча на интересующий объект. Прерыватель (не показан) может затем открываться, чтобы позволить рентгеновским лучам освещать объект-цель в течение короткого заданного периода времени (известного как время запроса). Система сбора данных записывает интенсивность сигнала, принимаемого от детекторов обратного рассеяния.
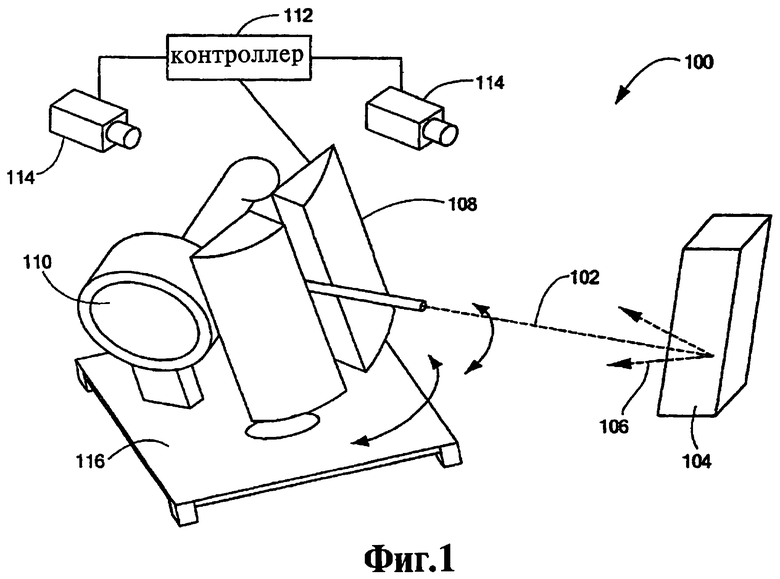
Если ссылаться на фиг.2, для точной калибровки интенсивности сигнала обратного рассеяния может быть выбрано несколько точек освещения (или точек "запроса") 202, 204 на цели 200 или на аналогичных целях на одинаковом расстоянии. Если возникает сигнал от одной или более точки запроса, значительно более низкий, чем от других точек запроса, это может быть использовано для того, чтобы показать присутствие металлических веществ. На этом основании, в соответствии с вариантами осуществления настоящего изобретения, определяется описательная категория, такая как повышенная угроза безопасности, в соответствии с предварительно установленным критерием угрозы безопасности, и подходящие действия могут затем быть выбраны соответственно.
Варианты осуществления могут также быть подходящими для определения присутствия органических веществ на или в объектах, которые в основном состоят из металлических веществ. Примером этого может быть поиск взрывчатых веществ, скрытых в дверце транспортного средства. Для этого применения точки запроса с сигналом выше, чем предполагаемый, показывают присутствие скрытого органического вещества.
Для объектов, которые относительно близки к источнику рентгеновских лучей, сигнал обратного рассеяния может также быть используемым для обнаружения присутствия плотного органического вещества (такого, как взрывчатое вещество), скрытого на органическом объекте-цели с низкой плотностью. Такие вещества склонны к обратному рассеянию рентгеновских лучей до некоторой степени больше, чем плотные органические вещества, такие как человеческое тело.
В таблице показаны результаты компьютерного моделирования для системы запроса рентгеновских лучей обратного рассеяния, работающей на трех источниках напряжения 160 кВ, 450 кВ и 1,2 MB. Модели включают поиск при сигнале обратного рассеяния от личности на различных расстояниях и сравнение сигнала с сигналом от личности, переносящей стальной лист, или личности, переносящей взрывчатое вещество пентаэритриттетранитрат, содержащее шарикоподшипники в качестве шрапнели. Отношение сигнал/шум (ОСШ, aw.SNR, Signal-to-Noise Ratio) определяется:
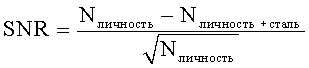
где Nличность представляет собой число зарегистрированных рентгеновских лучей от личности, не переносящей сталь, и Nличность+сталь представляет собой число зарегистрированных рентгеновских лучей от личности, переносящей сталь. Может быть видно, что действие 225 кВ и 450 кВ систем, по существу, одинаковое, но намного лучшее, чем действие 1,2 MB системы. Так как 160 кВ система будет более дешевой и более компактной, чем 450 кВ система, предпочтительным источником напряжения является 160 кВ. Следующая таблица показывает результаты компьютерного моделирования, показывающие отношение сигнал/шум для обнаружения металла на личности (в виде стального листа или матрицы 0,25 дюймовых шарикоподшипников) с системой запроса рентгеновских лучей обратного рассеяния, работающей на трех различных источниках напряжения и безопасных различных расстояниях.
Калибровка сигнала обратного рассеяния
Как раскрыто выше, в некоторых вариантах осуществления применяется оборудование для калибровки силы регистрируемого сигнала обратного рассеяния относительно опорного сигнала для определения, достаточно ли сигнал от точки запроса низкий для обозначения присутствия металла. Это может быть сделано в ряде случаев:
1. Определение расстояния до объекта-цели, являющегося запрашиваемым (например, посредством использования информации от видеосистем или использования лазерного устройства для измерения расстояний), и использование справочных таблиц для определения максимального сигнала обратного рассеяния для металлического вещества. Один из недостатков этого похода состоит в том, что аппаратное обеспечение системы должно быть относительно постоянным.
2. Сравнение силы сигнала от ряда точек запроса от объектов, всех приблизительно на одинаковом расстоянии.
3. Сравнение силы сигнала от ряда точек запроса 202, 204 от разных местоположений на одном объекте. Этот подход показан схематически на фиг.2.
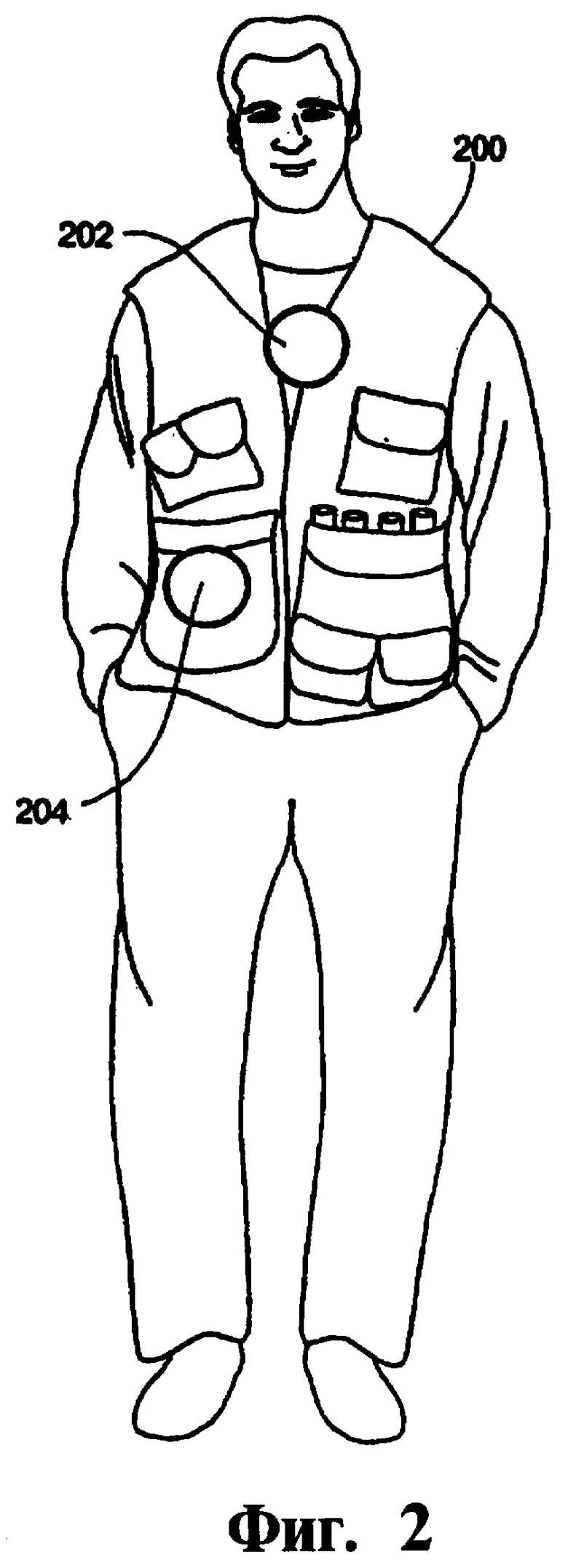
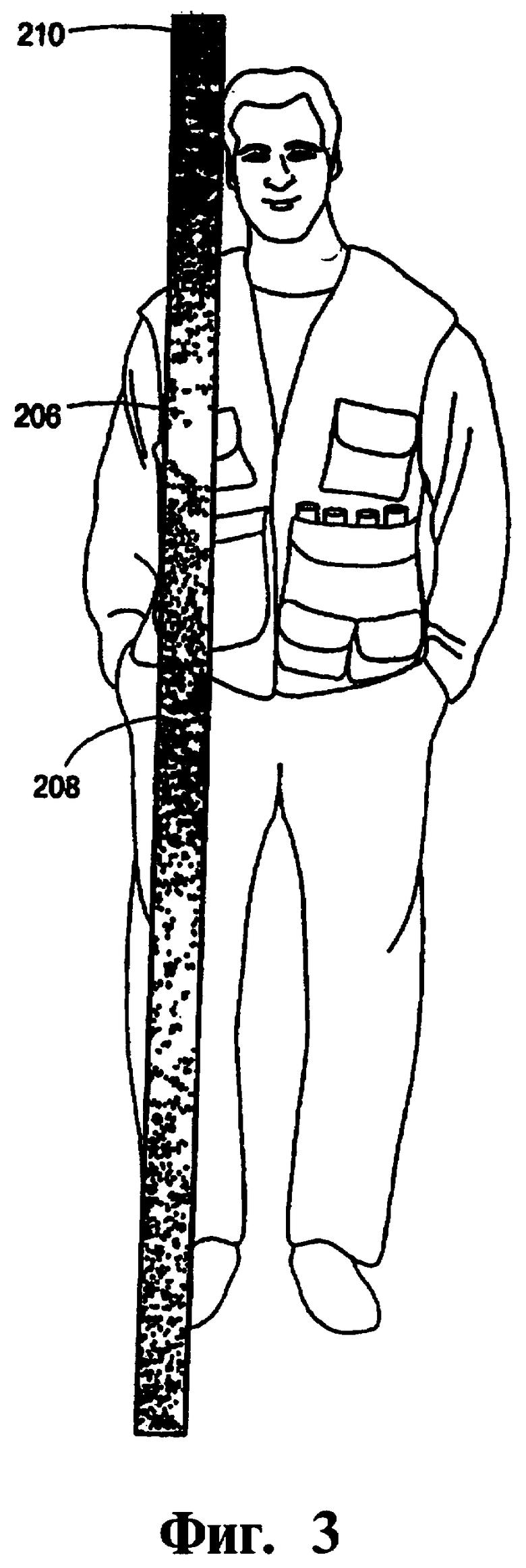
4. Сбор данных линии сканирования (показанной на фиг.3), состоящей из множества точек запроса поперек объекта, и поиск областей 208 на объекте, где яркость обратного рассеяния значительно ниже, чем для остального объекта 206. Этот подход показан схематически на фиг.3.
Один способ для одновременного сбора данных запроса и получения опорного сигнала показан на фиг.4. В этом варианте осуществления схема коллимации, такая как множество коллиматоров 302, позволяет нескольким высококоллимированным рентгеновским лучам 304 быть созданными одновременно. Вращающийся прерыватель, расположенный в конусе рентгеновского луча 308, созданного источником рентгеновских лучей 300, затем используется для гарантирования того, что в любой момент только один из лучей действительно освещает объект-цель 104. В примере, показанном на фиг.4, это означает, что могут собираться данные с четырех точек запроса в то время, когда прерыватель вращается в течение одного оборота. Одно из преимуществ этого варианта изобретения состоит в том, что скорость работы системы может быть улучшена, когда физически не требуется, чтобы коллиматоры лучей были повторно направлены между точками запроса. Может только потребоваться, чтобы система была один раз нацелена на центральную область подозрительного объекта. Число лучей и их ориентация относительно друг друга может быть оптимизированы для предпочтительных объектов-целей, являющихся досматриваемыми.
Пример одного из частных вариантов осуществления настоящего изобретения в следующей последовательности:
1. Оператор идентифицирует подозрительную цель, которую он желает запросить системой. Это может быть сделано, например, посредством щелчка мышки по подозрительному объекту на видеоизображении. Оператор может желать идентифицировать, например, личность, одетую в объемную одежду или несущую рюкзак.
2. Система запроса затем отправляет импульс рентгеновских лучей в
высококоллимированный луч, направленный на объект-цель. Сравнивая возвращающийся сигнал обратного рассеяния с опорным сигналом (используя один из способов калибровки, обсуждаемых выше), система автоматически определяет уровень угрозы от объекта.
3. Система затем предупреждает об опасности оператора, который может затем определять, какие действия необходимо выбрать. Если угроза полагается сомнительной, система может продолжать отслеживать подозрительную цель, используя систему видеослежения, и может выполнять дополнительный подтверждающий запрос (если необходимо) на более близком расстоянии.
4. Для подтвержденных угроз (цели с существенным металлическим содержимым) система может затем инициировать дополнительный досмотр, используя дополнительные системы, в которых применяются другие приемы досмотра или регистрации, такие как получение изображения рентгеновских лучей обратного рассеяния, получение изображения миллиметровых волн или спектроскопия в диапазоне тера герц. Они могут быть использованы для подтверждения присутствия боеприпасов или взрывчатых веществ на или в объекте-цели.
Регистрация прямого рассеяния в вариантах досмотра обратного рассеяния
Регистрация может быть улучшена относительно обнаружения металлических объектов, таких, которые могут быть скрыты, например, в металлической емкости, посредством использования освещения проникающим излучением или от подвижной платформы, такой как Mobile Inspection Van, раскрытой в патенте США 7,099,434, или от фиксированной платформы, такой как Ruggedized Detection Imaging ModuleTM (RDIM). Варианты осуществления настоящего изобретения предлагают улучшенное обнаружение металлических объектов в металлической емкости дополнительным неподвижным детектором пропускания с другой стороны объекта, являющегося сканируемым, с остронаправленным пучком, где источник остронаправленного пучка и детекторы или обратного рассеяния, или прямого рассеяния, или пропускания скрыты из виду для преимущества перед досматриваемым объектом.
Размещенные плотные металлические вещества могут быть четко увидены на изображении пропускания, получаемом, как показано на фиг.5, где ослабленное или блокированное пропускание обуславливает сильное ослабление рентгеновских лучей в этих веществах. Как используется здесь, термин "металлический" является заменяющим для материалов с большим "Z", где Z представляет собой атомную числовую характеристику вещества. Например, артиллерийские снаряды будут проявляться как очень темные объекты на изображении пропускания, при малом или не рентгеновском проникании через них. Отмечено, что это может быть сделано, когда Mobile Inspection Van 400 работает или во входном режиме движения, или в неподвижном входном режиме. Фиг.5 изображает источник 402 и модуль детектора обратного рассеяния 404, размещенные в Mobile Inspection Van 400, и рентгеновский луч 406, сканирующий объект 408. В модуль детектора пропускания 410 здесь включены прямой вертикальный сегмент 412 и горизонтальный сегмент 414.
Одним из путей способствования снижению проблемы получения изображений органических веществ в или за значительными количествами веществ с большим атомным номером (таких, как металл) является добавление нескольких детекторов прямого рассеяния 500, как показано на фиг.6. Поскольку рентгеновские лучи прямого рассеяния 510, регистрируемые в этих детекторах, были рассеяны только под малыми углами (обычно в диапазоне углов рассеяния 5°<Θ<30°), средняя энергия рентгеновских лучей прямого рассеяния значительно выше, чем энергии рентгеновских лучей обратного рассеяния (которые обычно не выше, чем 90 кэВ для первичного рентгеновского луча от 225 кВ источника рентгеновских лучей). Это обуславливает сохранение движущей силы в процессе рассеяния Комптона. Высокая энергия рентгеновских лучей прямого рассеяния позволяет им легче проникать в стали в корпусе транспортного средства и регистрироваться. Сигнал от детекторов прямого рассеяния может или быть скомбинирован с сигналом обратного рассеяния, или быть отображен оператору отдельно.
Способ объединения горизонтальной секции детектора пропускания 414 и детекторов обратного рассеяния 500 в быстро размещаемом модуле показан на фиг.7. Детекторы были объединены с "лежачим полицейским" 600, имеющим возможность повторного расположения, который может быть пригоден для хранения внутри задней части Mobile Inspection Van и который располагается на дороге перед началом сканирования транспортных средств. Если необходимо, лежачий полицейский может быть пригоден для разделения на три небольших модуля для хранения и легкости обращения. Вертикальное основание детектора пропускания будет отдельным блоком, помещенным на удаленной стороне транспортного средства, являющегося сканируемым. Ось рентгеновского луча 602 показана.
Следует отметить, что все притязания, составляющие это раскрытие, применимы не только для Mobile Inspection Van, как в ранее упомянутой патентной заявке, но также для любых применений технологии обратного рассеяния излучения, таких как морской контейнер повышенной прочности, который содержит подсистемы, аналогичные Mobile Inspection Van.
Получение изображений бистатического рассеяния Комптона
Здесь представлены оборудование и способы для увеличения эффективной дальности действия систем получения изображения рассеяния Комптона посредством отделения месторасположения детекторов рентгеновских лучей от источника рентгеновских лучей. В каждом применении детекторы находятся ближе к субъекту, чем остальная система получения изображения, обеспечивая более рассеянный поток, который должен быть получен, чем если бы детекторы были совмещены с источником рентгеновских лучей и другим оборудованием. Расположение источника, цели и детектора аналогично многочисленным применениям бистатического радиолокатора.
Из-за ряда факторов, имеющих ощутимое влияние на способность к образованию изображений на расстоянии, увеличение эффективной дальности действия систем получения изображения рассеяния может обеспечивать одно или более следующее преимущество: лучшее качество изображения для данного расстояния, большее поле наблюдение для данного качества изображения на данном расстоянии, меньшее время сканирования для создания данного качества изображения на данном расстоянии и уменьшение дозы к цели для данного качества изображения на данном расстоянии. Системы получения изображения большой дальности действия имеют различные применения в безопасности. Снижение дозы систем получения изображения, в основном, важно для досмотра людей.
Системы досмотра в соответствии с предпочтительными вариантами осуществления настоящего изобретения раскрыты со ссылкой на фиг.8. Источник 12 проникающего излучения направляет луч 20 проникающего излучения на объект 16. Источник 12 проникающего излучения расположен относительно объекта 16 так, что досматриваемое поле наблюдения меньше, чем 0,1 стерадиан (ср). Объект 16 рассеивает поток 22, который регистрируется детектором 14. Детектор 14 расположен относительно объекта так, чтобы стянуть больше чем 0,5 стерадиан в поле наблюдения объекта.
Применение для досмотра стен с инородными объектами
В одном варианте осуществления настоящего изобретения, раскрытом со ссылкой на фиг.9, система досмотра сконфигурирована для быстрого досмотра стен с нежелательными объектами или осуществления различных применений неразрушающего контроля, таких как поиск трещин, скрытых в панелях автомобилей.
Фиг.9 показывает конфигурацию, где источник 12 перемещается к центру комнаты 26, из которого источник 12 может быстро сканировать стены 24 комнаты 26 проникающим излучением. В этой конфигурации система может получать изображение всех секций стен 24, которые не охватываются детекторами 14. Положения детекторов 14 могут затем быть изменены, чтобы позволить системе досмотра сканировать отдаленные зоны. Если источник 12 не меняет положение, когда детекторы перемещаются, то оба изображения могут быть сшиты вместе в программном обеспечении для обеспечения непритязательного качества изображения комнаты 26. Области, которые найдены интересными, могут быть просканированы более близко, посредством использования способов, в соответствие с которыми, оба, источник 12 и детектор 14 располагаются так близко, как это возможно, к зоне досмотра.
Применение для определения местоположения людей в комнатах из смежных комнат
В другом варианте осуществления настоящего изобретения, показанном на фиг.10, источник 12 расположен в смежной комнате 28, а детекторы 14 могут быть или встроенными в стены 24, как показано на фиг.10, или расположенными в смежных комнатах 28, как показано на фиг.11. Сокрытие детекторов может быть выгодным в предпочтительных применениях. Беспроводные передатчики 30 могут быть использованы для соединения детекторов 14 с устройством обработки данных 32, совмещенным с источником рентгеновских лучей 12.
При такой конфигурации операторы имеют возможность сначала осуществлять сканирование низкой дозы/низкого качества, которое может обеспечивать достаточную информацию для отделения преступников от жертв. Затем, если необходимо, могут быть созданы изображения преступников высокого качества высокой дозы. В этом случае высота дозы может быть ограничена для взявшего заложника, пока минимизирована доза для невинных заложников.
Применение для увеличения эффективной дальности действия существующих систем досмотра
Как показано на фиг.12, AS&E в настоящий момент создан продукт для получения изображений обратного рассеяния, известный как Z-Backscatter Van™ (ZBV™), раскрытый, например, в патенте США №7,099,434. ZBV, изображенный, в общем, под цифрой 90, оптимален для расстояния до цели 2-5 футов. ZBV 90 часто применяется во "входном режиме", означающем, что ZBV с источником рентгеновских лучей 12 и детекторами 15 неподвижен, в то время как цель 13 (обычно, транспортные средства) едет через сканирующий рентгеновский луч 20.
При работе во входном режиме дальность действия ZBV 90 увеличивается за счет применения дополнительных детекторов 14 около цели 13, как показано на фиг.12. Такая конфигурация может иметь следующие преимущества по сравнению с надежностью группы детекторов обратного рассеяния ZBV 15:
- В случае взрыва цели только вспомогательные детекторы 14 будут разрушены.
- Произвольное число детекторов 14 может быть применено, с учетом области производственных издержек пользователей, для дополнительного качества изображения, когда и где необходимо.
- Положения детекторов 14 могут быть изменены пользователем для изменения затенения; для выделения данных из побочного рассеяния или прямого рассеяния; или даже для создания изображений пропускания рентгеновских лучей.
Детекторы 14 могут передавать данные в ZBV 90 электронным образом посредством использования беспроводных передатчиков 50. Единственным питанием, необходимым детекторам 14, является постоянный ток, обеспечиваемый источниками питания для трубок фотоэлектронного умножителя, которые могут питаться от аккумуляторных батарей, и питание для беспроводных передатчиков 50. Альтернативно, кабели питания и сигнала могут быть использованы для соединения ZBV 90 с детекторами 14.
Детекторы 14 являются одним из легких элементов полной системы рентгеновских лучей. Небольшое число вспомогательных детекторов может быть приспособлено к туристическому автобусу ZBV 90. Большая поставка детекторов может быть буксирована в небольшом трейлере (не показан) за ZBV 90 или транспортирована в других вспомогательных транспортных средствах (не показаны). Как показано на фиг.13, для работы ZBV 90 в режиме езды (где ZBV 90 едет в сторону цели 13 для сканирования рентгеновским лучом 20 поверх цели 13), вспомогательные детекторы 14 закреплены на роботизированном дистанционно управляемом самодвижущемся транспортном средстве 42. В этом варианте используется беспроводная связь для передачи инструкций в роботизированное дистанционно управляемое самодвижущееся транспортное средство 42 и для приема данных от детекторов 14.
Применение с использованием подвижных детекторов прямого применения для досмотра возможных СВУ или забытых рюкзаков
Система досмотра для обнаружения возможных самодельных взрывных устройств (СВУ) в соответствии с настоящим изобретением раскрыта со ссылкой на фиг.14. Детектор 14 закреплен на небольшом роботизированном дистанционно управляемом самодвижущемся транспортном средстве 42. Небольшое роботизированное дистанционно управляемое самодвижущееся транспортное средство 42 доставляет детектор 14 поближе к СВУ 40, в то время как источник рентгеновских лучей 12 удален на безопасное расстоянии с оператором (не показан). Хотя роботизированное дистанционно управляемое самодвижущееся транспортное средство 42 является относительно дорогостоящим элементом, по сравнению с системой рентгеновских лучей обратного рассеяния, небольшое роботизированное дистанционно управляемое самодвижущееся транспортное средство 42, предназначенное для применений военного назначения, часто переживает взрывы, и роботизированное дистанционно управляемое самодвижущееся транспортное средство 42 может быть дополнительно защищено броней от взрывной волны.
Расположение детектора 14 относительно СВУ 40 вызывает различные теневые эффекты в итоговом изображении. Если детектор 14 расположен только с одной стороны первичного рентгеновского луча 44, изображение будет иметь тени, аналогичные тем, что будут видны на фотографии, в случае камеры в положении источника рентгеновских лучей 12 и источника света в положении детектора рентгеновских лучей 14. Эти тени часто оказываются полезными в интерпретации изображений, так как они дают изображения трехмерного внешнего вида и делают некоторые границы более различимыми. Больше границ может быть улучшено перемещением детектора 14 в новое положение или использованием детекторов одновременно с данными от каждого детектора 14, обработанными отдельно. Эксперименты с AS&E показали, что этот эффект может быть даже более полезным, чем когда изображения от нескольких детекторов под двумя или более углами смешиваются в различных отношениях.
Два или более детектора 14 на двух или более роботах 42 вполне могут быть использованы для применения этого детектора смешанной концепции. Альтернативно, после того как создано одно изображение посредством использования одного детектора 14, детектор 14 может быть перемещен в новое положение, в то время как источник рентгеновских лучей 12 неподвижен, и затем создано второе изображение. Эти последовательные изображения могут быть скомбинированы (для увеличения эффективного потока) и смешаны в различных отношениях для применения возможных различных теневых конфигураций.
Применение с использованием подвижных детекторов прямого применения для сканирования обочины с СВУ
Полностью подвижный вариант предыдущего варианта осуществления допускает "развертку" для СВУ на обочине, как показано на фиг.15. Источник рентгеновских лучей 12 закреплен на транспортном средстве 46. Транспортное средство 46 может быть или может не быть защищено броней. Отсекатель луча в виде диска с отверстиями (не показан) сканирует лучом 20 в направлении, перпендикулярном дороге 48, в то время как транспортное средство 46 медленно едет по дороге 48, для создания двухмерного изображения. Детектор 14 будет ехать впереди транспортного средства 46 на небольшом роботизированном дистанционно управляемом самодвижущемся транспортном средстве 42. Если кабельное управление между транспортным средством 46 и роботизированным дистанционно управляемым самодвижущимся транспортным средством 42 представляет проблему, то каблирование может быть заменено беспроводной системой связи 50 для направления роботизированного дистанционно управляемого самодвижущегося транспортного средства 42 и принятия сигналов от детектора 14.
Как изображено на фиг.16, источник рентгеновских лучей 12 может быть присоединен к шарнирному креплению 52 так, чтобы можно было получить изображение одной из сторон дороги, или можно было досмотреть объект 40, лежащий на дороге.
Изменения в скорости транспортного средства 46 могут вызывать искажения в изображении. Эти изменения обычно не замедляют интерпретацию изображений обратного рассеяния, однако искажения могут быть более проблематичными в применениях с большой дальностью действия. Может быть применен сканирующий привод для регулирования скорости обоих, транспортного средства 46, перемещающего источник рентгеновских лучей 12, и роботизированного дистанционно управляемого самодвижущегося транспортного средства 42, перемещающего детектор 14. Большую проблему представляют неровность поверхности дороги и бугры на дороге. Они вызывают дрожание источника рентгеновских лучей вверх и вниз, создавая соответствующие искажения в изображении. Хотя эти искажения обычно не являются проблемой для сканирования на расстоянии несколько футов, этот эффект будет расти пропорционально расстоянию. Изменение в положении транспортного средства на один градус, например, переместит луч 20 только на один дюйм при расстоянии 5 футов. Однако луч 20 изменит положение на 6 дюймов при расстоянии 30 футов. Данное искажение будет даже более заметным (относительно существующих систем), поскольку системы большой дальности действия, такие как настоящее изобретение, будут обычно работать с намного меньшими полями наблюдения, чем те, что были использованы в системах малой дальности действия.
В соответствии с различными вариантами осуществления изобретения источник рентгеновских лучей 12 стабилизируется посредством использования некоторых технологий, которые используются для стабилизации орудия на современном танке. Так как отсекатель в виде диска с отверстиями (не показан) сам по себе является большим гироскопом, отсекатель в виде диска с отверстиями может быть закреплен на подвесном устройстве кардана и амортизаторах удара для минимизации изменений в положении рентгеновского луча 20, в то время как транспортное средство 46 движется по неровной почве.
Изображение намного менее чувствительно к изменениям в положении детектора 14. Изменения в положении или поднятие детектора 14 во время сканирования будет вызывать только небольшие изменения в затенении изображения, которые не будут препятствовать интерпретации изображения, и, вероятно, даже не будут замечены.
Применение для разведки наблюдением выбранных транспортных средств или личностей, пересекающих обозначенный проход
В другом варианте осуществления концепции бистатического обратного рассеяния личности или транспортные средства, подвергаемые досмотру, могут направляться для пересечения в хорошо обозначенную область. Эта область может быть крытым переходом в аэропорту, или на дороге, или в туннеле, через который проходят транспортные средства.
Существующие концепции для досмотра каждой личности в такой ситуации требуют пространства для комплектации источника обратного рассеяния и детектора вблизи сквозного пути. Более того, личности должны проходить через луч с определенной скоростью, личности досматриваются только сбоку, и каждый субъект, проходящий через досматриваемую зону, должен быть облучен.
Ситуации, где любое одно из вышеупомянутых ограничений недопустимо, могут быть разрешены за счет конфигурации такой, как показанная на фиг.17 и 18. Источники рентгеновских лучей 12 присоединены к поворотному креплению 54, предназначенному для выбора любого произвольного подмножества большой области для сканирования рентгеновским лучом 20.
В каждой из таких систем операторы выбирают личность 56 (на фиг.17) или транспортное средство 58 (на фиг.18) и окрашивают только эту цель рентгеновскими лучами. Личность 56 или транспортное средство 58 могут быть изучены, пока они находятся в проходе 60, который выстроен детекторами 14.
Если проход 60 представляет собой узкий проход (или, если дорога проходит через туннель), то детекторы 14 могут легко быть скрыты в стенах и/или потолке или быть замаскированы как часть стен или потолка. При некоторых обстоятельствах возможно также встроить детекторы 14 в поверхность прохода 60. В конфигурации, где детекторы 14 размещены в стенах, полу или потолке туннеля, возможно добиться зоны действия около 4 π ср, тем самым применяя возможную наибольшую фракцию рассеянных фотонов. Такие системы добиваются более высокой эффективности собирания рассеянных фотонов, чем существующие системы получения изображений рассеяния Комптона ближнего действия.
Как показано на фиг.17, источники рентгеновских лучей 12 могут быть расположены в потолке, таким образом, операторы имеют возможность лучше регулировать их относительно интересующих людей. На фиг.19 источники рентгеновских лучей 12 изображены со стороны прохода 60. Однако в туннеле источники рентгеновских лучей 12 могут также быть подвешены на потолке.
Использование источников множества рентгеновских лучей 12 или даже одного источника рентгеновских лучей, который может быть направлен из середины в оба конца прохода 60, позволяет операторам получать изображения личности 56 или транспортного средства 58 под множеством углов. Если источники множества рентгеновских лучей 12 направлены на один объект или объекты, которые находятся один около другого, то источники рентгеновских лучей 12 нуждаются в электронной синхронизации так, чтобы в любой момент только один стрелял.
Устройства кодирования на источниках направленного принципа действия могут быть использованы для идентификации местоположения(ий) цели и только для обеспечения сигнала от ближайших детекторов, который должен быть обработан, для ограничения электронного шума и рассеяния в воздухе.
За счет получения изображения личности 56 или транспортного средства 58 на расстоянии скорость становится менее критичным фактором, чем в системах получения изображении ближнего поля действия, поскольку угловая скорость намного меньше, когда наблюдение ведется на расстоянии. Получение изображения цели под углом, который находится около линии направления движения цели, дополнительно снижает видимое угловое движение и дополнительно облегчает получение изображений движущегося объекта.
Детекторы 14, встроенные в пол или покрытие дороги, как показано на фиг.19 и 20, должны иметь возможность выдерживать вес любого объекта 80 (людей, животных или транспортных средств), которые могут двигаться над ними. Очень твердые опоры, такие как стальные пластины, обычно не используются перед детекторами рассеяния Комптона, поскольку энергия рентгеновских лучей рассеяния Комптона обычно слишком низкая, чтобы проникать через такие конструкции. Однако конструктивная опорная сетка 62, выполненная из конструктивного материала (такого, как сталь), может быть расположена над детектором 14, как показано на фиг.19 и 20.
Эффективность регистрации детектора 14 будет только снижена за счет того, что часть зоны регистрации будет блокироваться твердыми частями конструктивной опорной сетки 62. Конструктивная опорная сетка 62 не будет создавать артефакты какого-либо вида в изображениях рассеяния Комптона, поскольку рентгеновские изображения рассеяния Комптона пространственно модулируются скорее перемещением первичного рентгеновского луча, чем пиксилизацией детекторов 14, как в случае главным образом рентгеновских лучей пропускания и системах получения оптических изображений.
Детектор 14 может быть скрыт, посредством камуфляжа 64 или иным способом, в некоторых случаях, при дополнительных затратах на ослабление рентгеновского сигнала. Во внешних применениях может быть использован тонкий слой грязи или листьев. В переходе в аэропорту тонкий лист пластика с декоративным рисунком может завуалировать любые идентификационные признаки детектора 14.
Применение для разведки наблюдением широкой зоны
В другом варианте осуществления, показанном на фиг.21 и 22, группа детекторов 14 расположена в интересующих областях, и вся область может быть "окрашена" одним источником рентгеновских лучей 12.
Детекторы 14 сгруппированы в или на земле в области разведки наблюдением. Источник рентгеновских лучей находится в центральном месторасположении, имеет возможность "стрелять" во все области, где расположены детекторы 14. Этот путь потока рентгеновских лучей, используемый для получения изображения каждого пикселя данной цели, практически не зависит от расстояния, поскольку не имеет значения, где в области объект 82 стоит, объект 82 заставляют остановиться практически на одинаковом расстоянии от ближайших детекторов 14. Источник рентгеновских лучей может сканировать азимутально на протяжении до 360 градусов, в некотором смысле, аналогично системам радиолокации.
В этом режиме непрерывной развертки, в то время как сканируемая зона обозревается, сигнал обратного рассеяния в любой точке не должен изменяться до тех пор, пока не будет представлен новый объект. Следовательно, компьютер может контролировать изображение или только объединенный сигнал из любой данной области изображения и предупреждать об опасности людей-операторов в случае изменения. Внезапное увеличение плотности изображения может показывать присутствие живого незваного гостя (личности или животного). Более тонкие изменения могут показывать движение объектов (например, транспортных средств, проникающих в область, или движение закамуфлированных людей/транспортных средств, которые были спрятаны в области до того, как началось сканирование). Альтернативно, системы оптического или инфракрасного получения изображений могут быть использованы аналогичным образом для автоматического обнаружения потенциальных угроз. В то время как потенциальная угроза снижается, система может автоматически начинать более подробное сканирование рентгеновскими лучами Комптона для создания изображения, которое должно быть проанализировано человеком-оператором.
Датчики давления (не показаны) могут быть объединены с детекторами 14 в земле. В этом случае датчики давления будут первой системой досмотра. Затем компьютер может автоматически наводить рентгеновский луч 20 на область запроса и создавать изображение.
Режим непрерывной развертки может также быть использован для сканирования толпы с потенциальными бомбометателями-самоубийцами.
Датчики давления, объединенные с детекторами 14 и расположенные в земле вокруг детекторов 14, могут быть использованы для считывания, когда объект 82 движется параллельно пути луча. Эта информация может быть использована автоматической системой безопасности для ограничения дозы к объекту 82 прерыванием луча 20 или изменением пути развертки. Лучшего пространственного угла охвата добиваются, когда мозаичный рисунок детекторов 14 "устлан" землей.
В некоторых вариантах осуществления изобретения детекторы 14 могут быть закамуфлированы тонким слоем грязи или иным способом скрыты, хотя некоторые виды камуфляжа могут приводить к снижению сигнала. Альтернативно, или дополнительно, детекторы могут быть также спрятаны в наземных объектах, таких как искусственные скалы или деревья, хотя большой пространственный угол охвата будет маловероятен в этом случае.
Детекторы 14 могут быть применены как находящиеся в свободном монолитном расположении 68, хотя большой пространственный угол потребует заполнения большей площади монолитами, которые могут преграждать линии видимости поля зрения от источника рентгеновских лучей 12 до потенциальных интересующих целей. Здания 70 и другие уязвимые конструкции могут иметь детекторы 14, закрепленные на стенах зданий.
Электронный шум может быть ограничен только обработкой сигналов от этих детекторов 14, которые находятся около цели рентгеновского луча 20. Если луч 20 возбужден в направлении детектора 14, этот сигнал обрабатывается отдельно, когда будет иметь преимущество скорее сигнал изображения пропускания, чем сигнал рассеяния Комптона. Устройства кодирования на устройстве позиционирования источника могут показывать положение пятна рентгеновского луча для того, чтобы показать системе управления, когда детекторы 14 находятся в направлении пути луча 20. Электроника и программное обеспечение предназначено, чтобы позволить пользователю размещать и конфигурировать любое число детекторов 14 в любой выбранной конфигурации. Различные почвы и различные применения будут требовать различные конфигурации и число детекторов 14.
Рассеяние в воздухе становится более важным соображением, когда сканирование ведется на расстоянии. Детекторы 14 около первичного луча 20 принимают сигнал рассеяния в воздухе, который будет "затуманивать" изображение. Шум, возникающий из-за этого эффекта, может быть уменьшен чтением сигналов от детекторов 14 на различных расстояниях в отдельных каналах 74, как показано на фиг.24, так, чтобы личность 76 получала изображение только в одном детекторе, и это изображение содержит только обратное рассеяние в воздухе от этого детектора (или набора детекторов в этой области). Детекторы 14, расположенные вдоль пути первичного луча 20, которые не находятся около цели, принимают более низкий сигнал от цели и, следовательно, имеют более высокое отношение шума к сигналу. Полное отношение сигнал-шум будет улучшено игнорированием полного сигнала от этих детекторов.
Хотя были раскрыты различные типовые варианты осуществления изобретения, специалисту в области техники будет очевидно, что могут быть сделаны различные изменения и модификации, которые будут добиваться некоторых преимуществ изобретения без отклонения от истинного предмета изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ УЛУЧШЕНИЯ НАПРАВЛЕННОГО ДОСМОТРА ЛЮДЕЙ | 2008 |
|
RU2475851C2 |
| УСТРОЙСТВО И СПОСОБ ДОСМОТРА ОБЪЕКТОВ | 2005 |
|
RU2444723C2 |
| Система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, способ автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования и способ формирования теневого изображения инспектируемого объекта | 2018 |
|
RU2716039C1 |
| Способ определения пространственного профиля инспектируемого объекта | 2022 |
|
RU2790794C1 |
| УСТАНАВЛИВАЕМАЯ НА ТРАНСПОРТНОЕ СРЕДСТВО СИСТЕМА ДОСМОТРА НА ОСНОВЕ ОБРАТНОГО РАССЕЯНИЯ | 2018 |
|
RU2719492C1 |
| Устанавливаемая на транспортное средство система досмотра на основе обратного рассеяния | 2018 |
|
RU2710518C1 |
| РЕНТГЕНОВСКИЙ ОСМОТР С ПОМОЩЬЮ ОДНОВРЕМЕННОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ПРОПУСКАНИЯ И ОБРАТНОГО РАССЕИВАНИЯ СВЕТА | 2007 |
|
RU2499251C2 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |
| МНОГОЭНЕРГЕТИЧЕСКИЕ МНОГОДОЗОВЫЕ УСКОРИТЕЛИ, СИСТЕМЫ БЫСТРОГО КОНТРОЛЯ И СПОСОБЫ БЫСТРОГО КОНТРОЛЯ | 2014 |
|
RU2608341C1 |
| МИШЕНЬ, ПРЕОБРАЗУЮЩАЯ ИЗЛУЧЕНИЕ В ФОТОНЕЙТРОНЫ | 2008 |
|
RU2406171C1 |


Использование: для досмотра объекта посредством проникающего излучения. Сущность: заключается в том, что выбирают объект-цель, освещают выбранный объект-цель сведенным в параллельный пучок лучом проникающего излучения, который подают от источника, регистрируют излучение обратного рассеяния от выбранного объекта-цели с использованием детектора обратного рассеяния при его расположении относительно объекта-цели с охватом поля наблюдения, видимого из выбранного объекта-цели, по меньшей мере, в 5 раз больше, чем поле наблюдения, видимое из выбранного объекта-цели, которое получают от источника, получают предполагаемые опорные значения на основании связи с частями выбранного объекта-цели, производят сравнение показателей излучения обратного рассеяния с предполагаемыми опорными значениями и на основании сравнения определяют описательную категорию, которая характеризует выбранный объект-цель. Технический результат: обеспечение лучшего качества изображения, большего поля наблюдения для данного качества изображения, меньшего времени сканирования для создания данного качества изображения и уменьшение дозы, получаемой целью, для данного качества изображения. 3 н. и 15 з.п. ф-лы, 24 ил., 1 табл.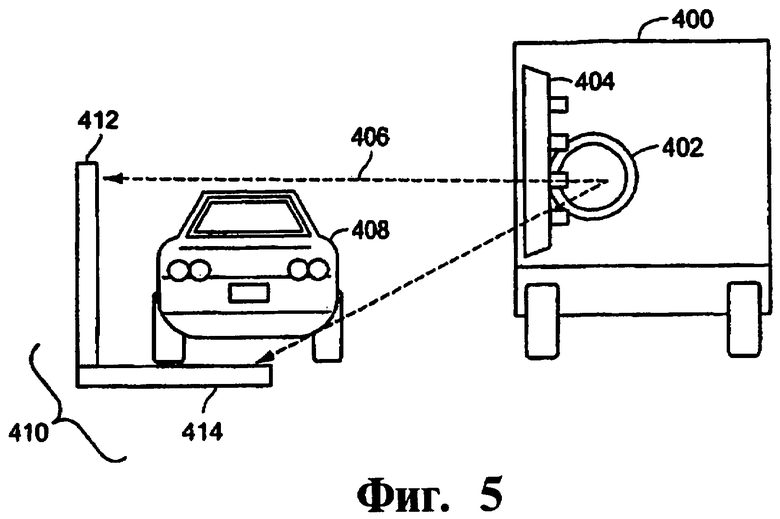
1. Способ досмотра объекта, в котором выбирают объект-цель, освещают выбранный объект-цель сведенным в параллельный пучок лучом проникающего излучения, который подают от источника, регистрируют излучение обратного рассеяния от выбранного объекта-цели с использованием детектора обратного рассеяния при его расположении относительно объекта-цели с охватом поля наблюдения, видимого из выбранного объекта-цели, по меньшей мере, в 5 раз больше, чем поле наблюдения, видимое из выбранного объекта-цели, которое получают от источника, получают предполагаемые опорные значения на основании связи с частями выбранного объекта-цели, производят сравнение показателей излучения обратного рассеяния с предполагаемыми опорными значениями и на основании сравнения определяют описательную категорию, которая характеризует выбранный объект-цель.
2. Способ по п.1, в котором проникающее излучение является рентгеновским излучением.
3. Способ по п.1, в котором описательная категория показывает ненормально высокое металлическое содержимое при показателях ниже, чем предполагаемые опорные значения, и в котором описательная категория показывает ненормально высокое органическое содержимое при показателях выше, чем предполагаемые опорные значения.
4. Способ по п.1, в котором описательная категория показывает потенциальную угрозу безопасности в соответствии с предварительно установленным критерием угрозы безопасности.
5. Способ по п.1, в котором описательная категория показывает подтвержденную угрозу безопасности в соответствии с предварительно установленным критерием угрозы безопасности.
6. Способ по п.1, в котором выбор основан на оптической разведке наблюдением интересующей зоны.
7. Способ по п.1, в котором выбор основан на неоптической разведке наблюдением интересующей зоны.
8. Способ по п.1, в котором дополнительно определяют предполагаемые опорные значения на основании освещения местного ориентира проникающим излучением.
9. Способ досмотра объекта проникающим излучением, в котором детектор пропускания встраивают в пол или в поверхность дороги, создают луч проникающего излучения средствами скрытого источника излучения, сканируют проникающую радиацию поперек объекта, регистрируют проникающее излучение, пропускаемое через объект в скрытом детекторе пропускания, создают сигнал прямого пропускания и определяют специфическую характеристику содержимого объекта, частично, на основании сигнала прямого пропускания.
10. Способ по п.9, в котором детектор пропускания включает, по меньшей мере, одну линейную секцию.
11. Способ по п.9, в котором в состав детектора пропускания включают L-образный детектор с вертикальной секцией и горизонтальной секцией.
12. Способ по п.9, в котором детектор пропускания включают в состав конструкции лежачего полицейского.
13. Способ по п.9, в котором дополнительно регистрируют проникающее излучение, рассеянное объектом, в детекторе прямого рассеяния, создают сигнал прямого рассеяния и определяют специфическую характеристику содержимого объекта, частично, на основании сигнала рассеяния.
14. Способ по п.13, в котором сигнал прямого пропускания и сигнал прямого рассеяния комбинируют для создания улучшенного изображения рассеяния.
15. Способ по п.13, в котором сигнал прямого пропускания и сигнал прямого рассеяния комбинируют для создания улучшенного изображения пропускания.
16. Способ по п.14 или 15, в котором дополнительно отображают изображение оператору.
17. Способ по п.13, в котором детектор прямого рассеяния включают в состав конструкции лежачего полицейского.
18. Система, в которой применяется способ по любому из пп.8-17.
| WO 2004043740 A2, 27.05.2004 | |||
| US 5600700 A, 04.02.1997 | |||
| JP 2004251669 А, 09.09.2004 | |||
| Приспособление к машине для проклейки углов сопряжения картонных щек со шпулей | 1931 |
|
SU33060A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА В РАССЕЯННОМ И/ИЛИ ПРОШЕДШЕМ ИЗЛУЧЕНИИ | 2004 |
|
RU2256169C1 |
| СПОСОБ МАЛОУГЛОВОЙ ИНТРОСКОПИИ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2137114C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НЕРАЗРЕШЕННЫХ ПРЕДМЕТОВ | 2000 |
|
RU2253861C2 |
| US 5068883 A, 26.11.1991. | |||

