Область техники
Настоящее изобретение относится к устройствам для распознавания пользователя методом 3D сканирования и может быть использовано для обеспечения пропуска пользователя в область доступа или выхода из области доступа.
Предшествующий уровень техники
Системы регистрации трехмерных объектов могут быть построены на различных принципах, одним из которых является стереоскопический принцип. Стереоскопическая система состоит из двух камер, регистрирующих объект с разных, но не слишком сильно отличающихся ракурсов. На полученных изображениях определяются соответствующие точки (стереоотождествление). Затем, зная внутренние параметры камер стереопары, а также их взаимное расположение, можно определить трехмерные координаты точек объекта методом триангуляции. Несмотря на успехи последних лет, в решении данной задачи остается ряд вопросов, связанных с принципиальными ограничениями данного метода, в частности со стереоотождествлением точек объектов, не обладающих ярко выраженной текстурой или имеющих большие однородные области.
Чтобы преодолеть эти недостатки стереоскопического метода, было предложено заменить одну из камер стереопары проектором и было получено устройство регистрации трехмерных объектов, основанное на активном параллаксном принципе. Система, построенная на данном принципе, работает следующим образом: на объект проецируется некоторая картина (структурированная подсветка), ее искажения, вызванные формой объекта, регистрируются камерой.
В настоящее время разработано множество различных вариантов картин для использования в системах структурированной подсветки, представляющих собой как серии изменяющихся картин (картины с временным мультиплексированием), так и неизменные картины с использованием различных вариантов цветовой кодировки. Временная кодировка использует последовательность черно-белых картин. Суть этого метода состоит в том, чтобы кодировать положение пикселя на матрице проектора набором интенсивностей в последовательности проецируемых картин. Набор картин использует «битовое» кодирование: набор двухцветных (черно-белых) картин представляет собой двоичный код, определяющий «номер» пикселя в строке. Такой способ нечувствителен к цвету поверхности, позволяет кодировать каждый пиксель на матрице проектора, однако требует статичности положения объекта из-за большого количества используемых картин.
Цветовая кодировка использует только одну картину. Положение каждого пикселя однозначно кодируется значением цвета данного пикселя и нескольких его «соседей». При создании картины с цветовой кодировкой обычно стремятся получить минимальный размер окрестности пикселя, требуемый для однозначного восстановления, и минимальное количество различных цветов (для повышения надежности определения каждого цвета). Преимуществом такого метода является возможность восстановления формы объекта всего лишь по одной картине и, как следствие, возможность регистрирования движущихся объектов. К недостаткам следует отнести чувствительность метода декодирования цветной картины к структуре регистрируемой поверхности и ее цвету.
Известно устройство для бесконтактного измерения геометрических параметров поверхности лица человека (см., например, полезная модель RU 112992 U1, опубликована 22.06.2011). Устройство содержит лазерный источник структурированной подсветки, источники ввода изображений, блок обработки информации, а также два источника ввода информации в виде HD-вебкамер. Лазерный источник структурированной подсветки проецирует на объект под углом линию, перемещающуюся по поверхности лица человека, одновременно происходит запись изображения с двух HD-вебкамер, в результате записи получаются две видеопоследовательности, по которым определяются координаты точек, принадлежащие поверхности лица человека. Заявленное устройство находит применение в системах контроля и управления доступом на основе биометрических технологий.
К недостаткам указанного устройства можно отнести низкую точность и длительное время контроля, связанные с наличием в способе операции сканирования.
Известно устройство для бесконтактного контроля линейных размеров трехмерных объектов (см, например, 2184933 С1, опубликовано 10.07.2002), которое используется для визуализации профилей трехмерных объектов. Устройство реализует метод структурированной подсветки. Устройство содержит источник оптического излучения и последовательно установленные по ходу луча транспарант, выполненный в виде пространственного модулятора интенсивности оптического излучения, объектив, проецирующий изображение картины линейчатой структуры, возникающей на поверхности контролируемого объекта, фоторегистратор, преобразующий спроецированное объективом изображение в цифровое, и цифровой электронный блок, пересчитывающий фиксируемые фоторегистратором цифровые изображения в величины координат контролируемой поверхности. Цифровой электронный блок выполнен с дополнительным выходом для управления пространственными модуляторами интенсивности оптического излучения, соединенным с входом управления модулятором интенсивности оптического излучения и возможностью управлять пространственной модуляцией интенсивности оптического излучения. Структурированная подсветка объекта формируется в виде апериодической системы полос, поэтому каждая полоса, искаженная рельефом поверхности контролируемого объекта, однозначно идентифицируется.
Устройство снабжено вторым объективом для проецирования изображения транспаранта на контролируемую поверхность, установленным за транспарантом на расстоянии, равном проекционному, выполненным в виде афокальной оптической системы, вторым электронным блоком сложения цифровых изображений, соединенным своим входом с выходом фоторегистратора, а выходом - с входом первого электронного цифрового блока, транспарант выполнен в виде управляемого пространственного модулятора интенсивности оптического излучения с возможностью формировать структурированную подсветку в виде апериодической системы полос, первый электронный цифровой блок снабжен дополнительным выходом, соединенным с входом управления модулятором интенсивности оптического излучения, и выполнен с возможностью управлять пространственной модуляцией интенсивности оптического излучения.
Недостатками указанного устройства является сложность конструкции и ограниченные функциональные возможности. Ограниченные функциональные возможности обусловлены необходимостью строго ориентировать контролируемый объект относительно источника излучения и устанавливать на определенном расстоянии от источника излучения.
В качестве ближайшего технического решения рассматриваются система и способ трехмерного измерения формы материальных объектов (см, например, патент RU 2521725 С2, опубликован 10.10.2011). Система содержит световой проектор для проецирования на поверхность объекта картины структурированного света, устройство съемки изображения упомянутой картины и вычислительное устройство для определения формы объекта. Проектор содержит источник света, слайд с картиной слайда и объектив, характеризующийся вершиной объектива. Форму объекта определяют с использованием триангуляционного алгоритма, основанного на соответствии между точками на картине слайда и упомянутом изображении. Картина слайда содержит множество кодированных элементов, характеризующихся параметром, определяющим форму, длину или толщину кодированного элемента. Кодированные элементы распределены в первую или вторую группу. На поверхности слайда определены первая и вторая воображаемые линии слайда. Первая воображаемая линия определена пересечением между поверхностью слайда и первой плоскостью, проходящей через вершины объективов. Вторая воображаемая линия определена пересечением между поверхностью слайда и второй плоскостью, проходящей через вершины объективов. Кодированные элементы первой и второй групп расположены вдоль первой и второй воображаемых линий.
Указанная система имеет ряд недостатков, которые устранены в заявленном изобретении. Для получения качественного 3D изображения оптическая система перед использованием подвергается юстировке и калибровке, после чего изменять положение оптических элементов нежелательно. В системе, рассматриваемой в качестве ближайшего технического решения, не обеспечивается жесткое крепление проекционной системы и камеры относительно друг друга, выставленные углы изменяются, что не позволяет обеспечить высокую точность идентификации пользователя по чертам лица. Система имеет низкую пропускную способность из-за отсутствия создаваемой оптической системой рабочей зоны, необходимой для ускорения анализа данных в процессе работы. Кроме того, система не обеспечивает возможность идентификации пользователя в условиях плохой освещенности и в полной темноте.
Краткое изложение сущности изобретения
В основу настоящего изобретения поставлена задача создания бесконтактного биометрического устройства идентификации пользователя по чертам лица, которое обеспечивает высокую точность идентификации благодаря точному взаимному расположению проекционной и оптической систем устройства и высокую пропускную способность благодаря формированию специальной рабочей зоны, в пределах которой осуществляется работа заявленного устройства по сравнению с известными устройствами идентификации, а также обеспечивает работу в условиях плохой освещенности и даже в полной темноте, что позволяет расширить возможности аутентификации в системах контроля и управления доступом.
Поставленная задача решена путем создания бесконтактного биометрического устройства идентификации пользователя по чертам лица, которое содержит:
корпус, предназначенный для установки перед входом/выходом области доступа на высоте 1300-1500 мм от уровня пола;
кронштейн, жестко закрепленный в корпусе так, что в рабочем положении продольная ось кронштейна находится в вертикальной плоскости,
камеру для 3D сканирования лица пользователя, установленную в корпусе на кронштейне так, что оптическая ось камеры образует с перпендикуляром к вертикальной плоскости угол α в пределах от 0 до 40 град. в направлении вверх или вниз от горизонтали, при этом угол β зрения камеры ограничен и составляет от 45 до 75 град.;
базу данных изображений лиц пользователей, имеющих право входа в область доступа; и установленные в корпусе:
блок формирования изображения, электрически связанный с камерой для 3D сканирования;
проекционную систему, работающую по методу структурной подсветки, установленную на кронштейне в непосредственной близости с камерой так, что оптическая ось проектора проекционной системы перпендикулярна вертикальной плоскости;
дисплей для отображения лица пользователя, размещенный на передней панели корпуса и связанный с блоком формирования изображения;
блок регистрации отсканированного изображения, связанный с камерой,
блок сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, связанный с базой данных изображений лиц пользователей;
средство управления механизмом открывания запорного устройства, установленного на входе/выходе области доступа, причем средство управления связано с выходом блока сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, для обеспечения доступа пользователя в область доступа.
Целесообразно, чтобы бесконтактное биометрическое устройство дополнительно содержало по меньшей мере одну дополнительную камеру для 3D сканирования лица пользователя, установленную в корпусе на указанном кронштейне в непосредственной близости от первой камеры на одной горизонтальной оси так, что оптическая ось каждой из камер образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град. вверх или вниз от горизонтали, при этом угол поля зрения по меньшей мере одной дополнительной камеры составляет от 45 до 75 град., а оптические оси камер находятся под углом от 0 до 30 град. относительно друг друга.
Целесообразно, чтобы проектор был размещен на кронштейне над или под камерой для 3D сканирования лица пользователя.
Целесообразно, чтобы кронштейн содержал на одном конце клиновидный элемент, определяющий угол установки камеры для 3D сканирования, причем угол клиновидного элемента направлен в строну от проекционной системы и составляет от 0 до 40 град.
Целесообразно, чтобы кронштейн содержал на одном конце дополнительный клиновидный элемент, определяющий угол установки дополнительной камеры для 3D сканирования, причем угол дополнительного клиновидного элемента направлен в сторону от проекционной системы и составляет от 0 до 40 град.
Целесообразно, чтобы клиновидный элемент был выполнен в виде отдельной детали и жестко прикреплен к кронштейну.
Целесообразно, чтобы клиновидный элемент был выполнен за одно целое с кронштейном.
Целесообразно, чтобы в качестве средства управления был использован контроллер на интерфейсе Виганда.
Целесообразно, чтобы бесконтактное биометрическое устройство дополнительно содержало блок хранения изображений лиц пользователей, регистрируемых блоком регистрации, подключенный к блоку регистрации отсканированного изображения.
Целесообразно, чтобы база данных изображений лиц пользователей была размещена в корпусе устройства.
Целесообразно, чтобы база данных изображений лиц пользователей была размещена в удаленном доступе.
Целесообразно, чтобы связь блока сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, с базой данных изображений лиц пользователей была осуществлена посредством проводной/беспроводной связи.
Целесообразно, чтобы угол β поля зрения камеры был ограничен посредством ограничителя.
Целесообразно, чтобы запорное устройство было установлено на средстве, препятствующем доступу, выбранном из группы, состоящей из двери, турникета, шлагбаума, шлюза, установленного на входе/выходе области доступа.
Целесообразно, чтобы проекционная система содержала нитрид-галиевый полупроводниковый светодиод в качестве источника света, при этом камера содержала бы фотоматрицу и объектив, согласованные с источником света.
Целесообразно, чтобы бесконтактное биометрическое устройство дополнительно содержало микрофон и динамик, установленные в корпусе, для интерактивного взаимодействия с пользователем по сигналу оператора/или по сигналу из средства управления.
Целесообразно, чтобы бесконтактное биометрическое устройство дополнительно содержало считыватель информации, размещенный на передней панели корпуса для взаимодействия с пользователем или идентификатором пользователя и подключенный к контроллеру.
Целесообразно, чтобы в качестве идентификатора пользователя использовалось одно из фотографии пользователя, отпечатка пальца пользователя, фотографии зрачка глаза пользователя.
Целесообразно, чтобы бесконтактное биометрическое устройство дополнительно содержало интерфейс для подключения к существующим системам контроля доступа, основанным на контактных способах идентификации.
Поставленная задача решена также путем создания способа работы бесконтактного биометрического устройства идентификации пользователя по чертам лица, содержащего этапы, на которых:
закрепляют камеру для 3D сканирования лица пользователя в корпусе на кронштейне так, что оптическая ось камеры образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град. в направлении вверх или вниз от горизонтали, при этом угол зрения камеры составляет от 45 до 75 град.;
задают место нахождения пользователя на плоскости перед камерой при сканировании в пределах от 60 до 80 см от вертикальной плоскости, на которой закреплена камера,
используют предварительно сформированную базу данных изображений лиц пользователей, имеющих право входа в область доступа, которая размещена в удаленном доступе;
осуществляют активирование камеры для 3D сканирования лица пользователя;
направляют ось взгляда камеры на область, где должно находиться лицо пользователя при идентификации;
регистрируют 3D изображение лица пользователя; и
передают полученное изображение в блок сравнения 3D изображений лиц пользователей;
вычисляют объем фигуры, образованной 3D изображением лица пользователя;
сравнивают значения данных объема 3D изображения лица пользователя с предварительно сформированным значением данных объема изображения лица этого пользователя, полученным из базы данных;
принимают решение о допуске пользователя к области доступа, если разность сравниваемых значений находится в заранее заданном диапазоне;
подают сигнал тревоги, если разность сравниваемых значений находится вне заранее заданного диапазона, после неуспешной попытки пользователя пройти регистрацию 3D изображения лица.
Целесообразно, чтобы способ дополнительно содержал этапы, на которых
предлагают пользователю пройти повторную регистрацию 3D изображения лица, если разность сравниваемых значений находится вне заранее заданного диапазона;
подают сигнал тревоги после неуспешной попытки пользователя пройти повторную регистрацию 3D изображения лица.
Целесообразно, чтобы использовалась по меньшей мере одна дополнительная камера для 3D сканирования лица пользователя, которая закреплена в корпусе на кронштейне так, чтобы оптическая ось камеры образовала с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град., при этом угол поля зрения камеры составляет от 45 до 75 град., причем оптические оси основной и дополнительной камер находятся под углом от 0 до 30 град. относительно друг друга.
Целесообразно, чтобы осуществляли дополнительную идентификацию, для чего прикладывали идентификатор пользователя из группы, состоящей из фотографии пользователя, пальца, фотографии зрачка глаза пользователя, к считывателю информации, откуда передавали бы данные пользователя к контроллеру.
Предложенное устройство обеспечивает повышение точности и скорости идентификации пользователей благодаря предложенной конструкции оптической схемы устройства, обеспечивающей высокоточное/откалиброванное взаимное расположение и направление проекционной системы и основной камеры и, при необходимости, дополнительной камеры для 3D сканирования и формирующей специальную рабочую зону устройства, при этом идентификация пользователей происходит с одновременным и согласованным по программе стартом работы всех элементов устройства.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
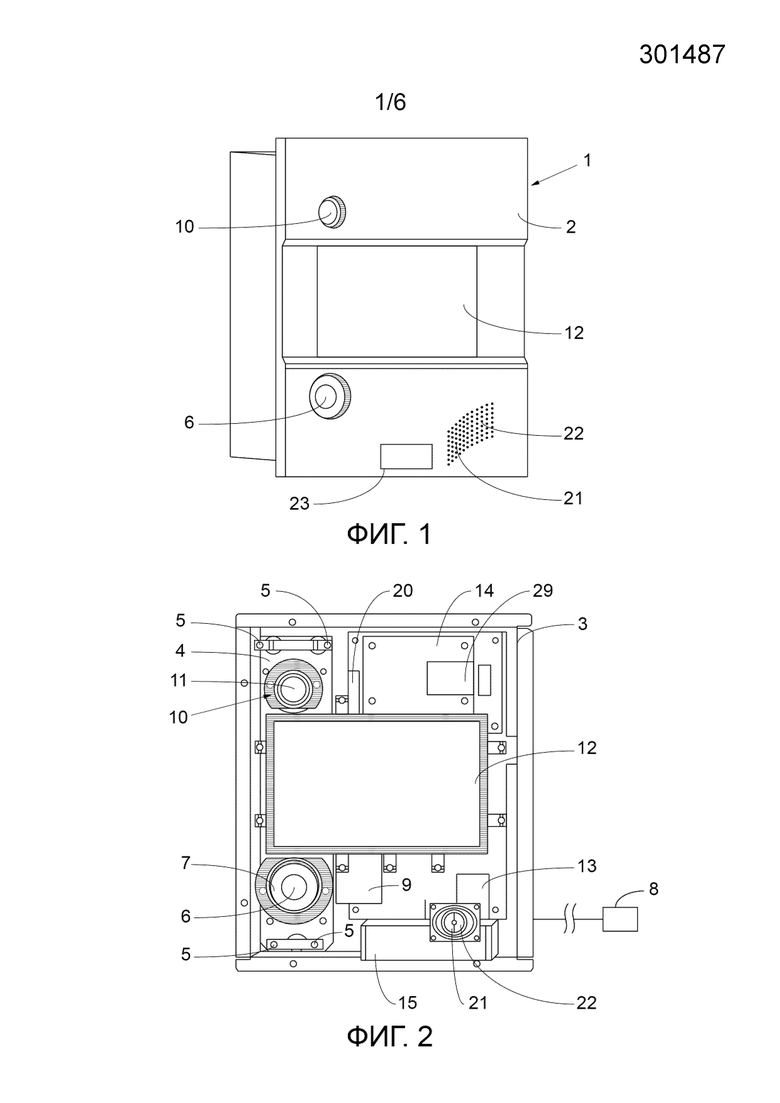
Фиг. 1 изображает общий вид заявленного устройства согласно изобретению;
Фиг. 2 изображает вид спереди заявленного устройства со снятой крышкой согласно изобретению;
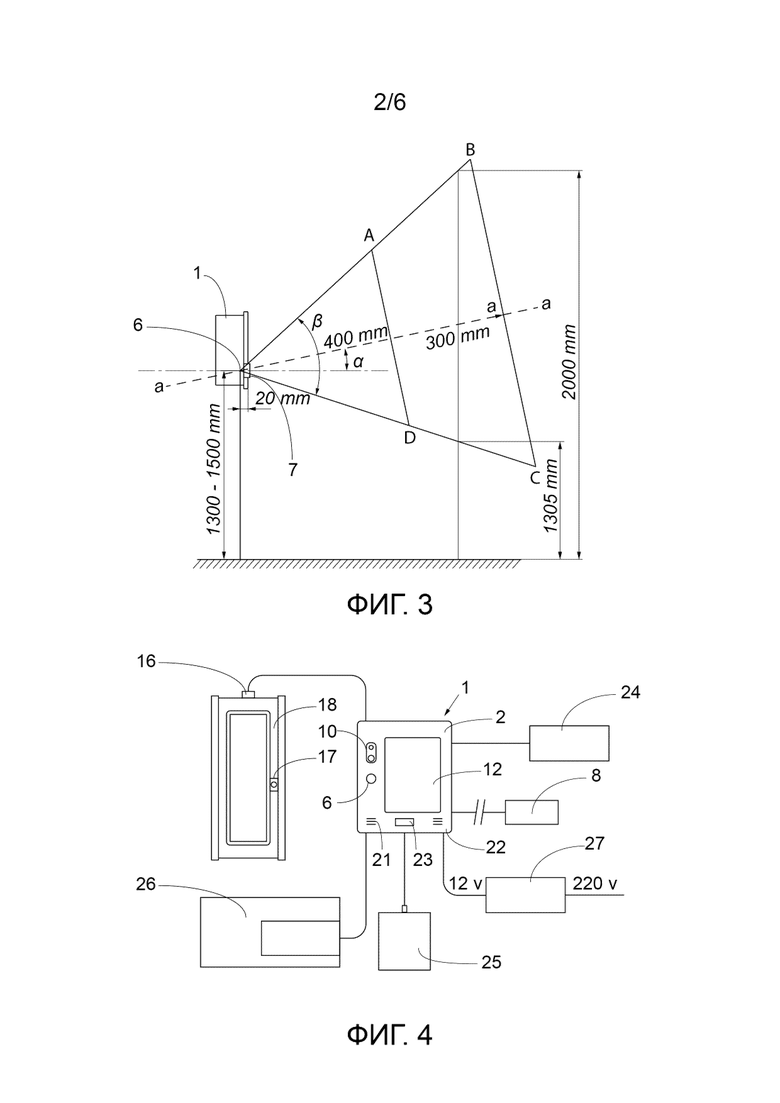
Фиг. 3 изображает угол расположения камеры для 3D сканирования относительно перпендикуляра к вертикальной оси и угол поля зрения камеры согласно изобретению;
Фиг. 4 изображает блок-схему бесконтактного биометрического устройства идентификации пользователя по чертам лица согласно изобретению;
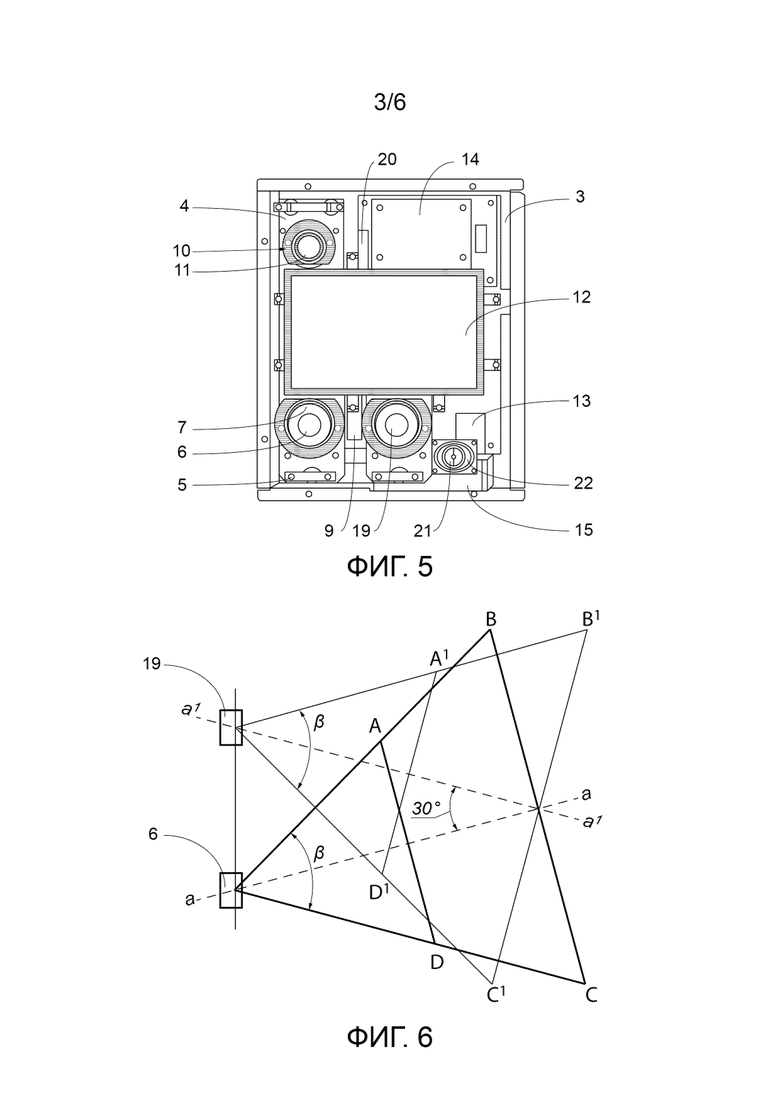
Фиг. 5 изображает вид спереди заявленного устройства со снятой крышкой, второй вариант выполнения, содержащий вторую камеру для 3D сканирования, согласно изобретению;
Фиг. 6 изображает на виде сверху углы полей зрения основной и дополнительной камер согласно изобретению;
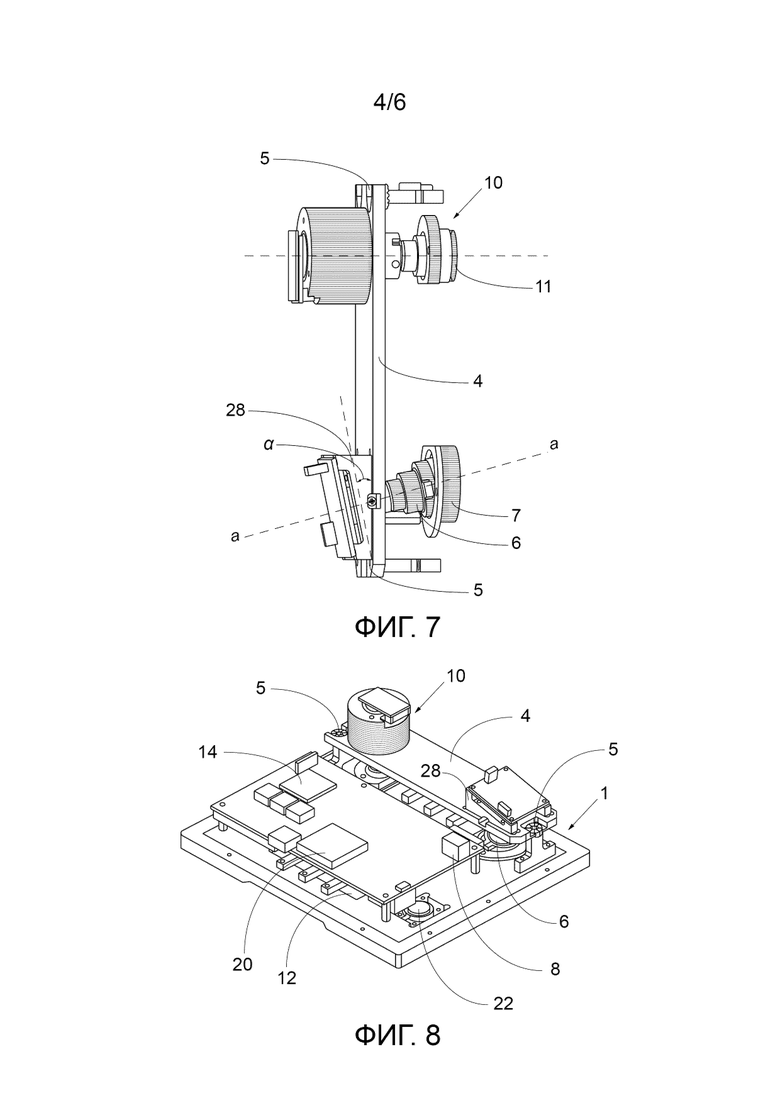
Фиг. 7 изображает общий вид сбоку кронштейна с установленными на нем камерой для 3D сканирования и проекционной системой согласно изобретению;
Фиг. 8 изображает общий вид устройства сзади со снятой крышкой согласно изобретению;
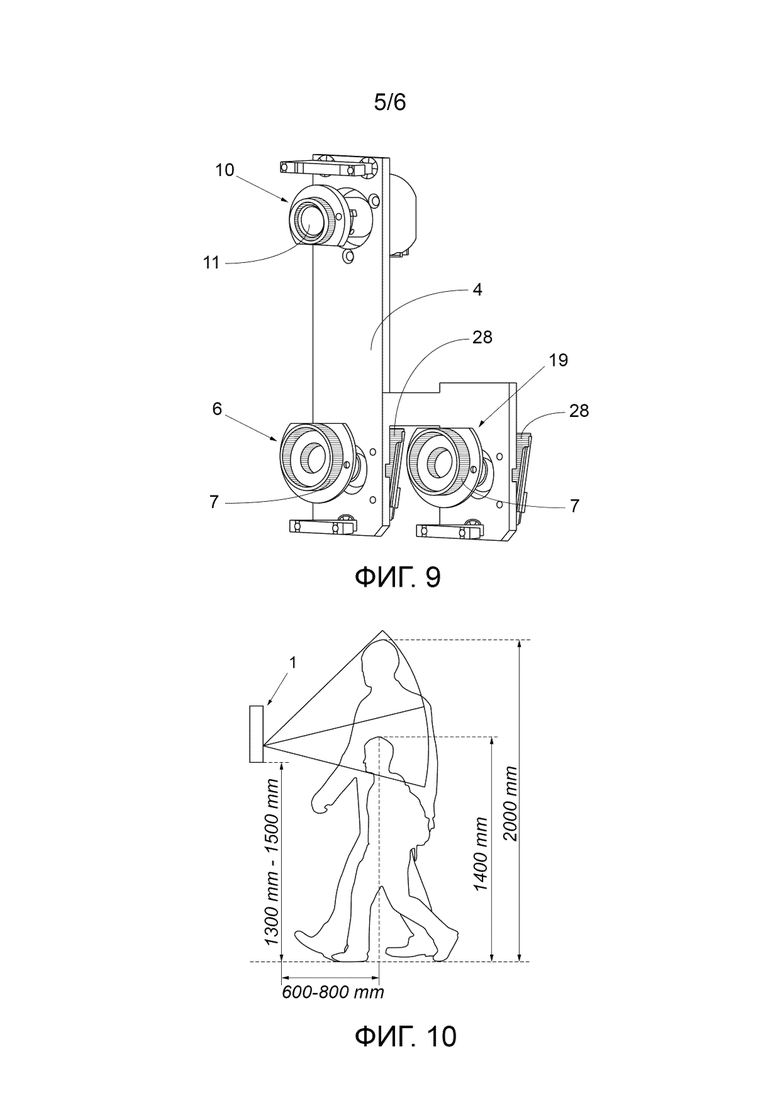
Фиг. 9 изображает общий вид кронштейна с установленными на нем двумя камерами для 3D сканирования и проекционной системой согласно изобретению;
Фиг. 10 изображает схему ориентации пользователя перед устройством согласно изобретению;
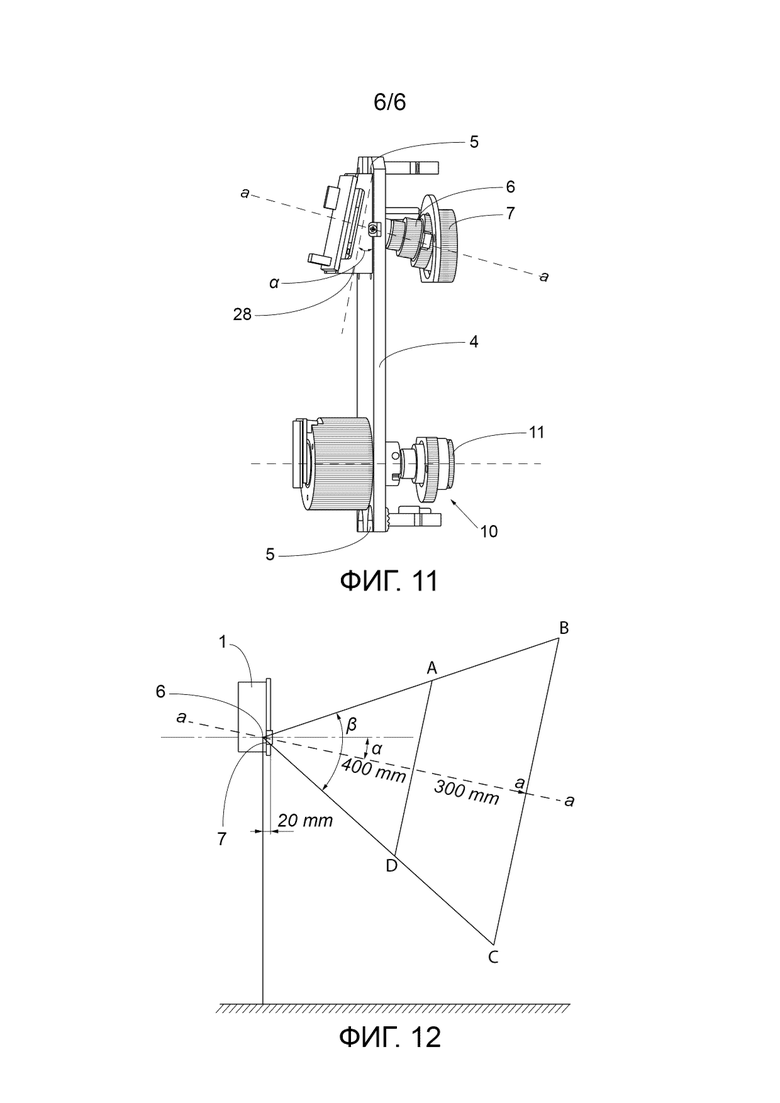
Фиг. 11 изображает общий вид сбоку кронштейна с установленными на нем камерой для 3D сканирования и проекционной системой, расположенной на кронштейне под камерой, согласно изобретению;
Фиг. 12 изображает угол расположения камеры для 3D сканирования относительно перпендикуляра к вертикальной оси и угол поля зрения камеры для случая, когда камера расположена на кронштейне над проекционной системой, согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
Бесконтактное биометрическое устройство 1 (Фиг. 1) идентификации пользователя по чертам лица согласно изобретению содержит корпус 2, предназначенный для установки перед входом/выходом области доступа на высоте 1300-1500 мм от уровня пола на расстоянии от 0 до 70 мм от опоры.
На задней стенке 3 корпуса 2 (Фиг. 2) жестко закреплен кронштейн 4 посредством болтов 5, предназначенный для крепления камеры 6 для 3D сканирования, причем в рабочем положении продольная ось кронштейна 4 находится в вертикальной плоскости. Камера 6 для 3D сканирования лица пользователя установлена в корпусе 1 на кронштейне 4 так, что оптическая ось а-а (Фиг. 3) камеры для 3D сканирования образует с перпендикуляром к вертикальной плоскости угол α в пределах от 0 до 40 град. в направлении вверх или вниз (раскрыто далее) от горизонтали (показана штрихпунктирной линией), при этом угол β зрения камеры для 3D сканирования составляет от 45 до 75 град. благодаря цилиндрическому ограничителю 7. На фиг. 3 угол α составляет 12 град. и угол β составляет 60 град. На Фиг. 3 показана рабочая зона распознавания ABDС, представляющая собой в объеме усеченный конус и имеющая предпочтительные размеры: 300-400 мм - высота конуса, АС - меньший диаметр и BD - больший диаметр конуса, которые будут варьироваться в зависимости от угла β зрения камеры. Таким образом, глубина 300 мм рабочей зоны распознавания всего устройства обеспечивает наиболее качественное распознавание 3D поверхности лица.
Устройство 1 содержит базу 8 данных изображений лиц пользователей, имеющих право входа в область доступа. Предпочтительно база 8 данных размещена в удаленном доступе, однако возможен вариант, когда база 8 данных размещена рядом с устройством 1 или в корпусе 2 устройства.
В корпусе 2 установлены: блок 9 (Фиг. 2) формирования изображения, электрически связанный с камерой 6 для 3D сканирования, и проекционная система 10, работающая по методу структурной подсветки. Проекционная система 10 установлена на кронштейне 4 в непосредственной близости с камерой 6 так, что оптическая ось проектора 11 проекционной системы 10 перпендикулярна плоскости кронштейна 4. Камера 6 для 3D сканирования и проекционная система 10 расположены вдоль продольной оси кронштейна 4. В варианте воплощения на фиг. 2 проекционная система 10 расположена на кронштейне 4 над камерой 6, т.е. камера 6 расположена ближе к земле.
На передней панели корпуса размещен дисплей 12 для отображения лица пользователя, связанный с блоком 8 формирования изображения.
В корпусе 1 размещен также блок 13 регистрации отсканированного изображения, связанный с камерой 6, и блок 14 сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе 8 данных, связанный проводной или беспроводной связью с базой 8 данных изображений лиц пользователей.
Устройство содержит также средство 15 управления механизмом 16 (Фиг. 4) открывания запорного устройства 17, установленного на входе/выходе области доступа, например на дверях 18 лаборатории. Средство 15 управления связано с выходом блока 14 сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе 8 данных, для обеспечения доступа пользователя в область доступа.
Возможен вариант выполнения, когда бесконтактное биометрическое устройство 1 дополнительно содержит по меньшей мере одну дополнительную камеру 19 (Фиг. 5) для 3D сканирования лица пользователя, установленную в корпусе 1 на указанном кронштейне 4 в непосредственной близости от первой камеры 6 так, что оптическая ось каждой из камер 6, 19 образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град., при этом угол поля зрения дополнительной камеры 19 составляет от 45 до 75 град. Оптические оси а-а и а'-a' (Фиг. 6) камер 6 и 19 находятся под углом от 0 до 30 град. относительно друг друга. Зона распознавания не меняется, т.е. вторая камера 19 работает в зоне А'В'С'D', совмещенной с зоной распознавания ABCD первой камеры 6, что обеспечивает улучшение качества и повышение скорости распознавания за счет считывания поверхности лица с двух камер 6, 19 одновременно.
В бесконтактном биометрическом устройстве 1 в качестве средства 15 управления использован контроллер на интерфейсе Виганда.
Бесконтактное биометрическое устройство 1 дополнительно содержит блок 20 (Фиг. 2) хранения изображений лиц пользователей, регистрируемых блоком регистрации, подключенный к блоку 13 регистрации отсканированного изображения.
Запорное устройство 17 может быть установлено на средстве, препятствующем доступу, например на двери, турникете, шлагбауме, шлюзе (не показаны), установленном на входе/выходе области доступа.
В описываемом варианте выполнения бесконтактного биометрического устройства 1 проекционная система 10 содержит нитрид-галиевый полупроводниковый светодиод в качестве источника света, при этом камера 6 содержит фотоматрицу и объектив, согласованные с источником света.
Бесконтактное биометрическое устройство 1 дополнительно содержит микрофон 21 и динамик 22, установленные в корпусе 2, для интерактивного взаимодействия с пользователем по сигналу оператора/или по сигналу из средства 13 управления.
Устройство дополнительно содержит сенсорный экран 23 (Фиг. 4), размещенный на передней панели корпуса 2, для взаимодействия с пользователем или идентификатором пользователя и подключенный к средству 24 управления, например контроллеру.
В качестве идентификатора пользователя используется одно из фотографии пользователя, отпечатка пальца пользователя, фотографии зрачка глаза пользователя.
Бесконтактное биометрическое устройство может быть выполнено с возможностью подключения к существующим системам 26 контроля доступа, основанным на контактных способах идентификации, например, оно может быть связано с устройством 25 считывания карты идентификации пользователя.
Устройство содержит автономный блок 27 питания на случай отключения сетевой электроэнергии.
На фиг. 7 показан общий вид сбоку кронштейна 4 с закрепленными на нем камерой 6 для 3D сканирования лица пользователя и проекционной системой 10. Как показано, кронштейн 4 содержит на одном конце клиновидный элемент 28. Угол α клиновидного элемента 28 направлен в строну от проекционной системы 9 и составляет от 0 до 40 град.
Кронштейн 4 представляет собой заранее просчитанную для данной оптической схемы и изготовленную с высокой точностью металлическую деталь, имеющую необходимые конструкционные отверстия для жесткого крепления к корпусу, а также крепления других элементов устройства. Кронштейн 4 имеет необходимые зоны для размещения и механической защиты электронных и оптических элементов устройства. Клиновидный элемент 28 кронштейна 4 отвечает за формирование необходимого угла α в оптический схеме, т.е. определяет угол установки камеры для 3D сканирования. Перпендикулярно клиновидному элементу 28 расположена оптическая ось а-а камеры 6, так что оптическая ось а-а расположена под углом от 0 до 40 град. в направлении вверх от горизонтали.
Возможны разные варианты реализации клиновидного элемента 28 кронштейна 4 и его функции по формированию углов. На Фиг. 7 показан вариант, когда клиновидный элемент 28 выполнен в виде отдельной детали и жестко прикреплен к кронштейну. Возможен вариант, когда клиновидный элемент 27 выполнен за одно целое с кронштейном 4 (не показано). Кронштейн 4 обеспечивает очень точное взаимное расположение элементов.
На Фиг. 8 показан общий вид сзади передней панели устройства 1 с установленным на ней кронштейном 6, на котором закреплены камера 6 для 3D сканирования лица пользователя и проекционная система 10.
На Фиг. 9 показан общий вид двух камер 6 и 19, закрепленных на кронштейне 4. В этом случае кронштейн 4 имеет сложную углообразную форму, по меньшей мере одна дополнительная камера 19 для 3D сканирования лица пользователя установлена в корпусе на кронштейне 4 в непосредственной близости от первой камеры 6.
На Фиг. 10 показана схема ориентации пользователя перед бесконтактным биометрическим устройством 1 идентификации.
На Фиг. 11 показан вид сбоку кронштейна 4 с установленными на нем камерой 6 для 3D сканирования и проекционной системой 10, которые расположены вдоль продольной оси кронштейна. В указанном варианте воплощения на фиг. 11 проекционная система 10 расположена на кронштейне 4 под камерой 6, т.е. ближе к земле.
При этом камера 6 для 3D сканирования расположена под углом α (фиг. 12) относительно перпендикуляра к вертикальной плоскости в направлении вниз от горизонтали (показана штрихпунктирной линией).
Работа бесконтактного биометрического устройства 1 идентификации пользователя по чертам лица осуществляется следующим образом.
Закрепляют камеру 6 для 3D сканирования лица пользователя в корпусе 2 на кронштейне 4 так, что оптическая ось камеры 6 образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град. в направлении вверх или вниз от горизонтали, при этом угол поля зрения камеры составляет от 45 до 75 град.
Осуществляют юстировку и калибровку оптических устройств. Задают место нахождения пользователя на плоскости перед камерой при сканировании в пределах от 60 до 80 см от вертикальной плоскости (Фиг. 10), на которой закреплена камера. Используют предварительно сформированную базу 8 данных изображений лиц пользователей, имеющих право входа в область доступа, причем база 8 данных размещена в удаленном доступе.
Осуществляют активирование камеры 6 для 3D сканирования лица пользователя, причем ось взгляда камеры направлена на область, где должно находиться лицо пользователя при идентификации. Регистрируют 3D изображение лица пользователя и передают полученное изображение в блок 14 сравнения 3D изображений лиц пользователей.
Вычисляют в блоке 29 вычислений объем фигуры, образованной 3D изображением лица пользователя, для чего после регистрации 3D изображения лица пользователя строится геометрическая фигура в виде полусферы со слепком лица пользователя на вершине и затем вычисляется объем такой фигуры для более быстрого сравнения. Сравнивают в блоке 14 сравнения значения данных объема 3D изображения лица пользователя, полученных из блока 29 вычислений, с предварительно сформированным значением данных объема изображения лица этого пользователя, полученным из базы 8 данных.
Если разность сравниваемых значений находится в заранее заданном диапазоне, принимают решение о допуске пользователя к области доступа, если разность сравниваемых значений находится вне заранее заданного диапазона, подают сигнал тревоги после неуспешной попытки пользователя пройти регистрацию 3D изображения лица.
Во втором случае предлагают пользователю пройти повторную регистрацию 3D изображения лица, т.е. если разность сравниваемых значений находится вне заранее заданного диапазона, и подают сигнал тревоги после неуспешной попытки пользователя пройти повторную регистрацию 3D изображения лица.
В некоторых случаях бывает предпочтительно использовать по меньшей мере одну дополнительную камеру 19 для 3D сканирования лица пользователя, которую закрепляют в корпусе 2 на кронштейне 4 так, что оптическая ось камеры образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град., при этом угол поля зрения камеры составляет от 45 до 75 град., причем оптические оси камер находятся под углом от 0 до 30 град. друг к другу.
Бесконтактное биометрическое устройство в некоторых случаях целесообразно подключить через интерфейс к существующим системам 26 контроля доступа, основанным на контактных способах идентификации.
Устройство 1 информирует пользователей посредством звуковых сигналов/видеоизображений о режимах работы и о процессе распознавания с помощью дисплея 12.
Для формирования базы 8 данных в режиме регистрации пользователей осуществляют активирование 3D камеры, многократную регистрацию эталонного 3D изображения лица пользователя, передачу полученных изображений на анализ в блок 14 сравнения 3D изображений лиц пользователей и запись данных в базу 8 данных блока хранения.
В режиме распознавания устройство ожидает появление пользователя в рабочей зоне устройства, производит регистрацию 3D изображения лица пользователя, передает полученное изображение в блок 14 сравнения 3D изображений лиц пользователей, сравнивает характеристики 3D изображения лица пользователя со всеми изображениями лиц, зарегистрированных в базе данных, и в случае совпадения принимает решение о допуске пользователя в область доступа. В случае отсутствия в блоке хранения данных пользователя последнему предлагается пройти повторную регистрацию 3D изображения лица, а также подается сигнал тревоги после нескольких неуспешных попыток пользователя пройти регистрацию 3D изображения лица.
Устройство имеет возможность считывания дополнительного идентификатора пользователя (hid- или proximity-карты) для обеспечения двухфакторной идентификации пользователя и установки повышенного уровня защиты.
Сенсорный экран 23 (Фиг. 4), размещенный на передней панели корпуса 2, предназначен для взаимодействия с пользователем или идентификатором пользователя и подключен к средству 24 управления, например к контроллеру. Пользователь прикладывает идентификатор, например свою фотографию, либо палец, либо фотографию зрачка глаза к считывателю 23 информации, откуда данные пользователя передаются к контроллеру.
Бесконтактное биометрическое устройство 1 может быть подключено к существующим системам 26 контроля доступа, основанным на контактных способах идентификации, например, оно может быть связано с устройством 25 считывания карты идентификации пользователя.
Промышленная применимость
Изобретение может быть использовано для идентификации пользователя по отсканированным чертам лица.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, ТЕРМИНАЛ И СИСТЕМА ДЛЯ БИОМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ | 2023 |
|
RU2815689C1 |
| СПОСОБ, ТЕРМИНАЛ И СИСТЕМА ДЛЯ БИОМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ | 2022 |
|
RU2798179C1 |
| СИСТЕМА И СПОСОБ РЕГИСТРАЦИИ ДВУХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2365995C2 |
| Биометрическая система формирования 3D изображения поверхности объекта или его частей | 2017 |
|
RU2667373C1 |
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБРАЗОВ | 2005 |
|
RU2315352C2 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ЧТЕНИЯ ДОКУМЕНТОВ | 2022 |
|
RU2781211C1 |
| ТУРНИКЕТ ОТРАСЛЕВОЙ РАСПАШНОЙ ШЛЮЗОВОГО ТИПА (ВАРИАНТЫ) | 2023 |
|
RU2836661C1 |
| СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2024 |
|
RU2835760C1 |
| СИСТЕМА ДЛЯ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЯ | 2024 |
|
RU2839244C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ПАПИЛЛЯРНОГО УЗОРА | 2008 |
|
RU2375958C1 |
Заявленное изобретение относится к устройствам для распознавания пользователя методом 3D сканирования и может быть использовано для обеспечения пропуска пользователя в область доступа или выхода из области доступа. Заявленное бесконтактное биометрическое устройство идентификации пользователя по чертам лица содержит корпус, устанавливаемый перед входом/выходом из области доступа на высоте среднего роста пользователя от уровня пола; кронштейн, жестко закрепленный в корпусе и предназначенный для крепления камеры для 3D сканирования; и камеру для 3D сканирования лица пользователя, установленную в корпусе на кронштейне так, что оптическая ось камеры образует с перпендикуляром к вертикальной плоскости угол α в пределах от 0 до 40 град. в направлении вверх или вниз от горизонтали. При этом угол β зрения камеры ограничен и составляет от 45 до 75 град. Также устройство содержит базу данных изображений лиц пользователей, имеющих право входа в область доступа; и установленные в корпусе: блок формирования изображения, электрически связанный с камерой для 3D сканирования; проекционную систему, работающую по методу структурной подсветки, установленную на кронштейне в непосредственной близости с камерой так, что оптическая ось проектора перпендикулярна плоскости кронштейна; дисплей для отображения лица пользователя, размещенный на передней панели корпуса и связанный с блоком формирования изображения; блок регистрации отсканированного изображения, связанный с камерой и с блоком вычислений; блок сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, связанный с базой данных изображений лиц пользователей; средство управления механизмом открывания запорного устройства, установленного на входе/выходе области доступа. Причем средство управления связано с выходом блока сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, для обеспечения доступа пользователя в область доступа. 2 н. и 21 з.п. ф-лы, 12 ил.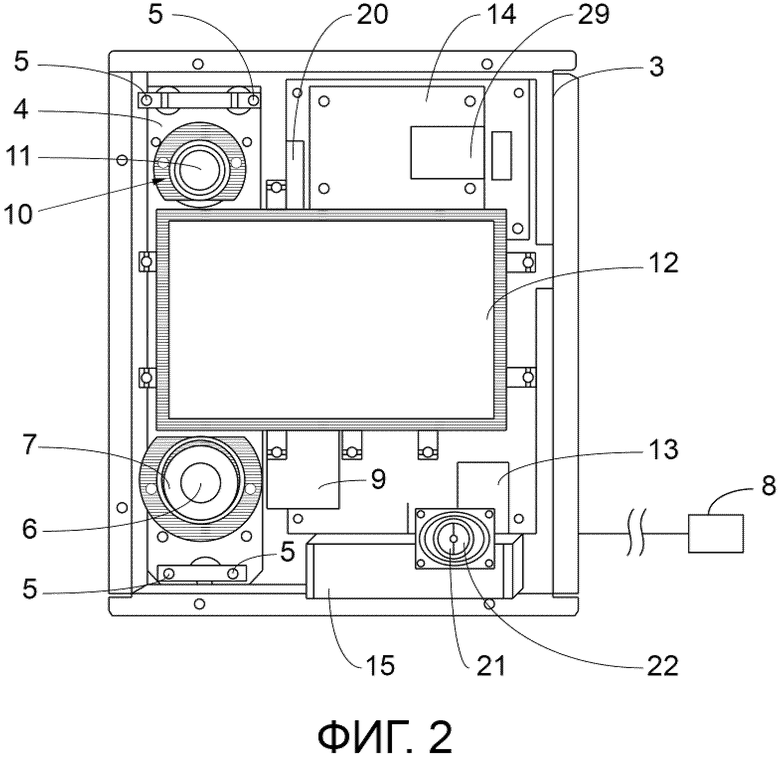
1. Бесконтактное биометрическое устройство идентификации пользователя по чертам лица, содержащее
корпус, предназначенный для установки перед входом/выходом области доступа на высоте среднего роста пользователя от уровня пола;
кронштейн, жестко закрепленный в корпусе так, что в рабочем положении продольная ось кронштейна находится в вертикальной плоскости,
камеру для 3D сканирования лица пользователя, установленную в корпусе на кронштейне так, что оптическая ось камеры образует с перпендикуляром к вертикальной плоскости угол α в пределах от 0 до 40 град. в направлении вверх или вниз от горизонтали, при этом угол β зрения камеры составляет от 45 до 75 град.;
базу данных изображений лиц пользователей, имеющих право входа в область доступа; и
установленные в корпусе:
блок формирования изображения, электрически связанный с камерой для 3D сканирования;
проекционную систему, работающую по методу структурной подсветки, установленную на кронштейне в непосредственной близости с камерой для 3D сканирования так, что оптическая ось проектора проекционной системы перпендикулярна вертикальной плоскости;
дисплей для отображения лица пользователя, размещенный на передней панели корпуса и связанный с блоком формирования изображения;
блок регистрации отсканированного изображения, связанный с камерой и с блоком вычисления,
блок сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, связанный с базой данных изображений лиц пользователей;
средство управления механизмом открывания запорного устройства, установленного на входе/выходе области доступа, причем средство управления связано с выходом блока сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, для обеспечения доступа пользователя в область доступа.
2. Бесконтактное биометрическое устройство по п. 1, дополнительно содержащее
по меньшей мере одну дополнительную камеру для 3D сканирования лица пользователя, установленную в корпусе на кронштейне в непосредственной близости от первой камеры на одной горизонтальной оси так, что оптическая ось каждой из камер образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град. вверх или вниз от горизонтали, при этом угол поля зрения по меньшей мере одной дополнительной камеры составляет от 45 до 75 град., а оптические оси камер находятся под углом от 0 до 30 град. относительно друг друга.
3. Бесконтактное биометрическое устройство по п. 1, в котором проектор размещен на кронштейне над или под камерой для 3D сканирования лица пользователя.
4. Бесконтактное биометрическое устройство по п. 1, в котором кронштейн содержит на одном конце клиновидный элемент, определяющий угол установки камеры для 3D сканирования, причем угол клиновидного элемента направлен в сторону от проекционной системы и составляет от 0 до 40 град.
5. Бесконтактное биометрическое устройство по п. 4, в котором кронштейн содержит на одном конце дополнительный клиновидный элемент, определяющий угол установки дополнительной камеры для 3D сканирования, причем угол дополнительного клиновидного элемента направлен в сторону от проекционной системы и составляет от 0 до 40 град.
6. Бесконтактное биометрическое устройство по п. 4 или 5, в котором клиновидный элемент выполнен в виде отдельной детали и жестко прикреплен к кронштейну.
7. Бесконтактное биометрическое устройство по п. 4 или 5, в котором клиновидный элемент выполнен за одно целое с кронштейном.
8. Бесконтактное биометрическое устройство по п. 1 или 2, в котором в качестве средства управления использован контроллер на интерфейсе Виганда.
9. Бесконтактное биометрическое устройство по п. 1 или 2, которое дополнительно содержит блок хранения изображений лиц пользователей, регистрируемых блоком регистрации, подключенный к блоку регистрации отсканированного изображения.
10. Бесконтактное биометрическое устройство по п. 1 или 2, в котором база данных изображений лиц пользователей размещена в корпусе устройства.
11. Бесконтактное биометрическое устройство по п. 1 или 2, в котором база данных изображений лиц пользователей размещена в удаленном доступе.
12. Бесконтактное биометрическое устройство по п. 1 или 2, в котором связь блока сравнения 3D изображений лиц пользователей с изображениями, сохраненными в базе данных, с базой данных изображений лиц пользователей осуществлена посредством проводной/беспроводной связи.
13. Бесконтактное биометрическое устройство по п. 1 или 2, в котором угол β зрения камеры ограничен посредством ограничителя.
14. Бесконтактное биометрическое устройство по п. 1 или 2, в котором запорное устройство установлено на средстве, препятствующем доступу, выбранном из группы, состоящей из двери, турникета, шлагбаума, шлюза, установленного на входе/выходе области доступа.
15. Бесконтактное биометрическое устройство по п. 1 или 2, в котором проекционная система содержит нитрид-галиевый полупроводниковый светодиод в качестве источника света, при этом камера содержит фотоматрицу и объектив, согласованные с источником света.
16. Бесконтактное биометрическое устройство по п. 1 или 2, которое дополнительно содержит микрофон и динамик, установленные в корпусе, для интерактивного взаимодействия с пользователем по сигналу оператора/или по сигналу из средства управления.
17. Бесконтактное биометрическое устройство по п. 1 или 2, которое дополнительно содержит считыватель информации, размещенный на передней панели корпуса для взаимодействия с пользователем или идентификатором пользователя и подключенный к контроллеру.
18. Бесконтактное биометрическое устройство по п. 1 или 2, в котором в качестве идентификатора пользователя используется одно из фотографии пользователя, отпечатка пальца пользователя, фотографии зрачка глаза пользователя.
19. Бесконтактное биометрическое устройство по п. 1 или 2, которое дополнительно содержит интерфейс для подключения к существующим системам контроля доступа, основанным на контактных способах идентификации.
20. Способ работы бесконтактного биометрического устройства идентификации пользователя по чертам лица по п. 1, содержащий этапы, на которых:
закрепляют камеру для 3D сканирования лица пользователя в корпусе на кронштейне так, что оптическая ось камеры образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град. в направлении вверх или вниз от горизонтали, при этом угол поля зрения камеры составляет от 45 до 75 град.;
задают место нахождения пользователя на плоскости перед камерой при сканировании в пределах от 60 до 80 см от вертикальной плоскости, на которой закреплена камера;
используют предварительно сформированную базу данных изображений лиц пользователей, имеющих право входа в область доступа, которая размещена в удаленном доступе;
осуществляют активирование камеры для 3D сканирования лица пользователя;
направляют ось взгляда камеры на область, где должно находиться лицо пользователя при идентификации;
регистрируют 3D изображение лица пользователя, и
передают полученное изображение в блок сравнения 3D изображений лиц пользователей;
вычисляют объем фигуры, образованной 3D изображением лица пользователя;
сравнивают значения данных объема 3D изображения лица пользователя с предварительно сформированным значением данных объема изображения лица этого пользователя, полученным из базы данных;
принимают решение о допуске пользователя к области доступа, если разность сравниваемых значений находится в заранее заданном диапазоне;
подают сигнал тревоги, если разность сравниваемых значений находится вне заранее заданного диапазона, после неуспешной попытки пользователя пройти регистрацию 3D изображения лица.
21. Способ по п. 20, в котором дополнительно
предлагают пользователю пройти повторную регистрацию 3D изображения лица, если разность сравниваемых значений находится вне заранее заданного диапазона;
подают сигнал тревоги после неуспешной попытки пользователя пройти повторную регистрацию 3D изображения лица.
22. Способ по п. 20, в котором дополнительно используют по меньшей мере одну дополнительную камеру для 3D сканирования лица пользователя, которую закрепляют в корпусе на кронштейне так, что оптическая ось камеры образует с перпендикуляром к вертикальной плоскости угол в пределах от 0 до 40 град., при этом угол поля зрения камеры составляет от 45 до 75 град., причем оптические оси камер находятся под углом от 0 до 30 град. относительно друг друга.
23. Способ по п. 20, в котором дополнительно прикладывают идентификатор из группы, состоящей из фотографии пользователя, пальца, фотографии зрачка глаза пользователя, к считывателю информации, откуда передают данные пользователя к контроллеру.
| СИСТЕМА И СПОСОБ ТРЕХМЕРНОГО ИЗМЕРЕНИЯ ФОРМЫ МАТЕРИАЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2521725C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОСТУПОМ | 2004 |
|
RU2251155C1 |
| RU 2004126108 A, 27.08.2004 | |||
| СПОСОБ ВИДЕОКОНТРОЛЯ И УПРАВЛЕНИЯ ДОСТУПОМ | 2007 |
|
RU2321068C1 |
| CN 104765998 A, 08.07.2015; | |||
| WO 2001023908 A1, 05.04.2000. | |||

