УРОВЕНЬ ТЕХНИКИ
Область техники, к которой относится изобретение
Описываемое изобретение относится к трехмерному измерению материальных объектов.
Уровень техники
Известны устройства и способы для выполнения бесконтактных измерений трехмерной формы поверхности материальных объектов, такие как триангуляционный способ с использованием структурированного света. Триангуляционный способ измерения формы поверхности материальных объектов использует проекцию на поверхность объекта света, который обычно является амплитудно-модулированным, частотно-модулированным и/или модулированным по длине волны («структурированный свет»). Изображение структурированного света, спроецированное на поверхность объекта (далее по тексту называемое «изображение»), фиксируется камерой в направлении, отличном от того направления, в котором проецируется структурированный свет. После этого изображение анализируется и вычисляется форма поверхности объекта. На результаты анализа влияет множество параметров, таких как параметры конкретной системы, которая формирует структурированный свет и сканирует изображение, форма поверхности, расстояние между поверхностью объекта и компонентами системы, ориентация объекта по отношению к компонентам системы. Поскольку обычно большинство перечисленных параметров либо заранее известны, либо легко определяются, за исключением формы объекта, расстояния между поверхностью объекта и компонентами системы и ориентации объекта по отношению к компонентам системы, можно определить форму поверхности объекта, используя триангуляционный способ для анализа этого изображения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с одним или с большим количеством вариантов выполнения предложены система и способ для трехмерного измерения формы материальных объектов с использованием бесконтактной триангуляции на основе структурированного света. Система включает в себя световой проектор для проецирования картины структурированного света на поверхность любого объекта и камеру для съемки изображения картины освещающего поверхность объекта структурированного света. Система дополнительно включает в себя вычислительное устройство для определения трехмерных измерений формы поверхности освещенного объекта с использованием триангуляционного алгоритма, основанного на вычисленном соответствии между спроецированным структурированным светом и снятым изображением. Структурированный свет содержит кодированные элементы, которые лежат в плоскостях, проходящих через вершины центральных проекционных зон и проектора, и камеры, и которые проходят также через пространство измеряемого объекта. Такое расположение позволяет быстро идентифицировать соответствие между кодированными элементами в структурированном свете и в снятом изображении ограничением количества возможных направлений, в которых может происходить искажение структурированного света, до одного известного направления, тем самым обеспечивая систему и способ быстрого и точного получения трехмерных измерений поверхностной формы объектов с использованием методологии бесконтактной триангуляции на основе структурированного света.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанные признаки и задачи настоящего изобретения будут более очевидны со ссылками на нижеследующее описание, сопровождаемое чертежами, на которых одноименные ссылочные позиции обозначают одни и те же элементы и на которых:
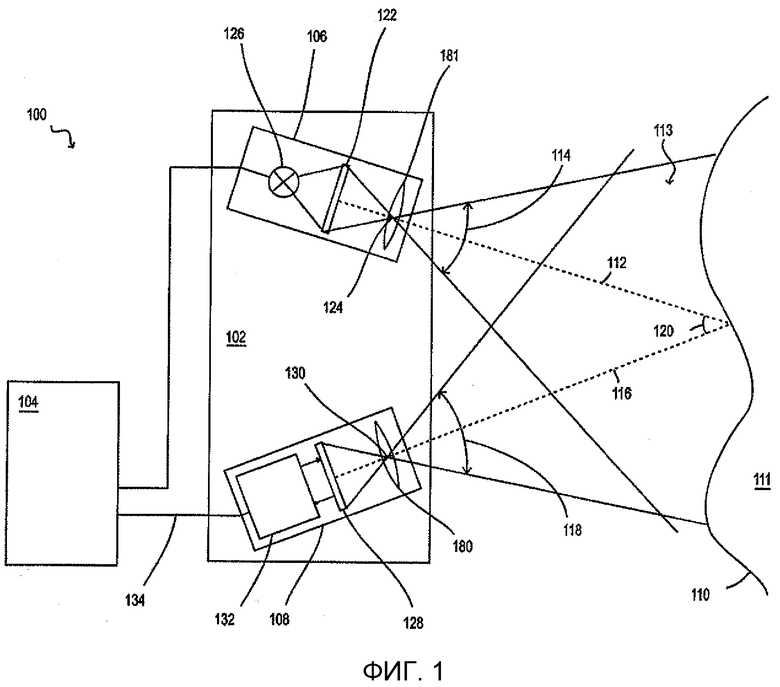
Фиг. 1 представляет собой схему, представляющую систему для трехмерных измерений формы материальных объектов в соответствии с одним или большим количеством вариантов выполнения настоящего изобретения.
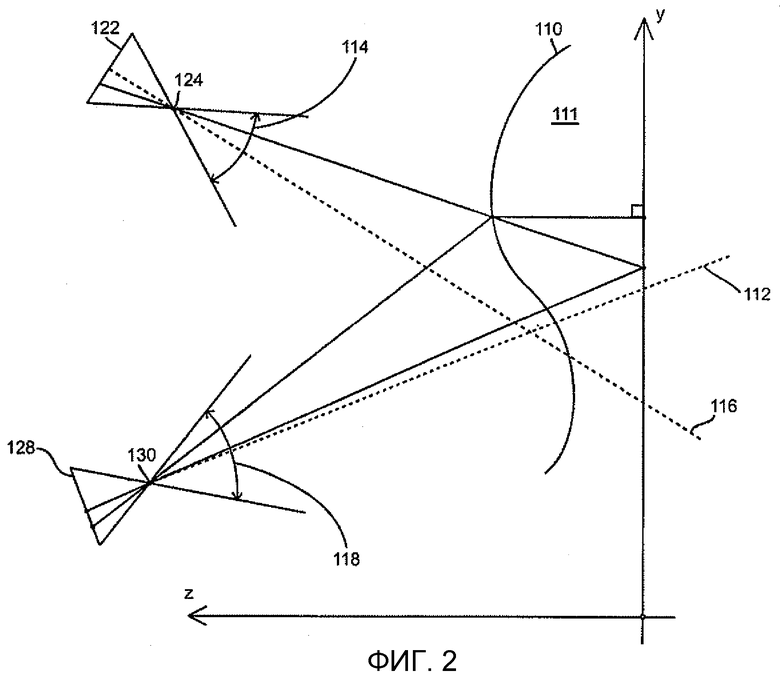
Фиг. 2 представляет собой геометрическую схему установки с позиционными соотношениями между проектором, камерой и объектом, измеряемым с использованием триангуляции.
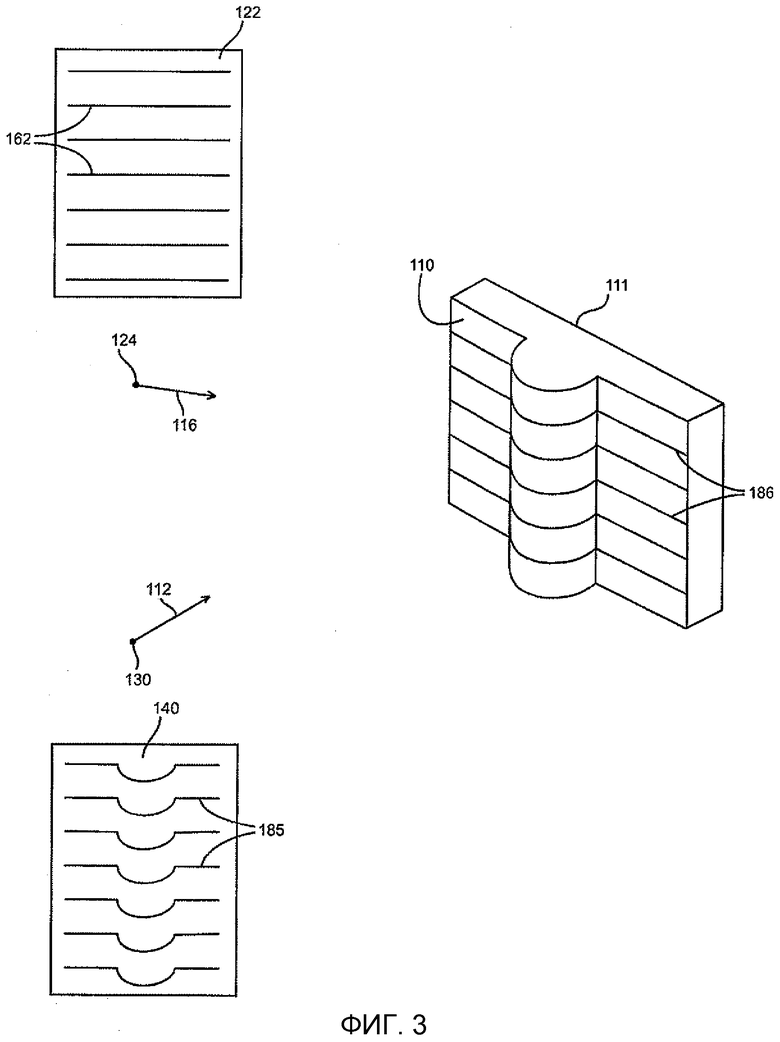
Фиг. 3 представляет собой пример слайда и соответствующего изображения в триангуляционной системе с использованием структурированного света.
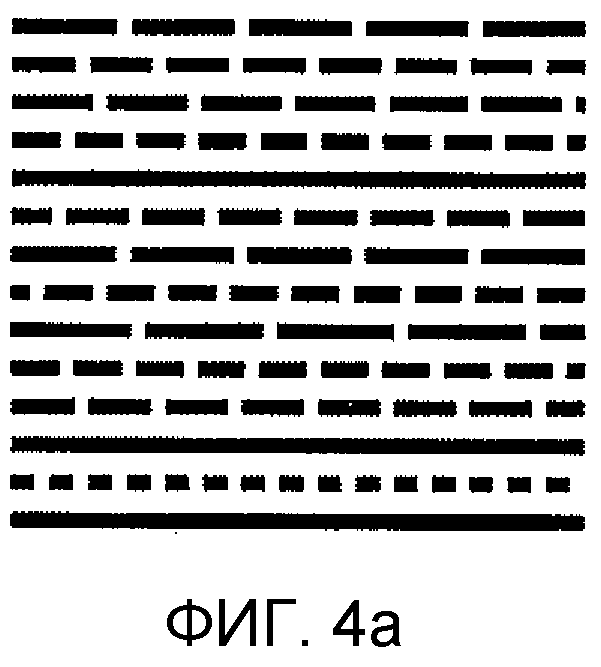
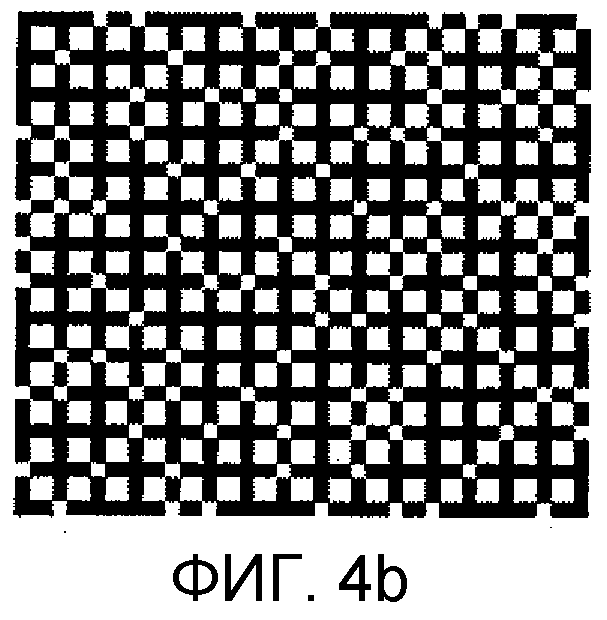
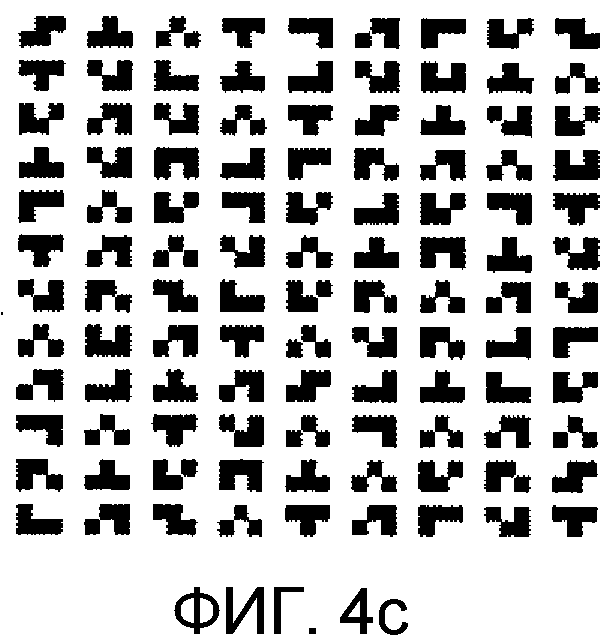
Фиг. 4А-4С представляют собой наглядные примеры картин структурированного света, используемых в триангуляционной системе с использованием структурированного света.
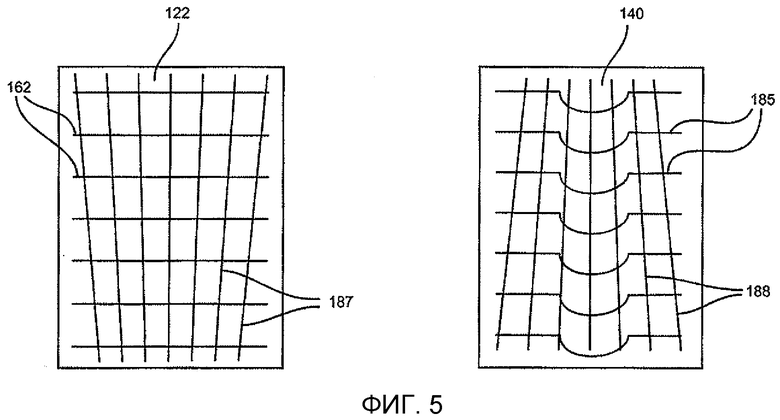
Фиг. 5 представляет собой иллюстрации меридианов проектора и камеры в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
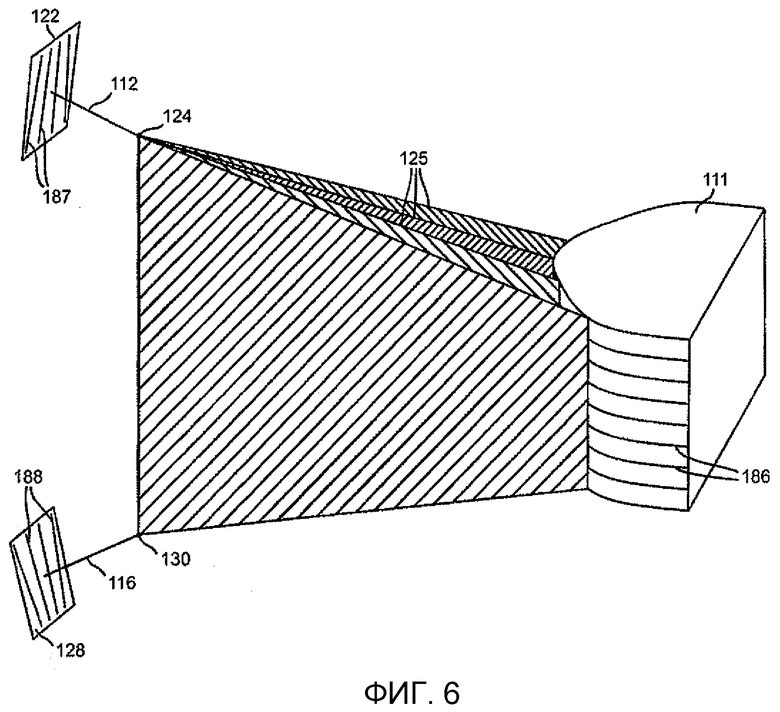
Фиг. 6 представляет собой частичную перспективную иллюстрацию геометрического правила позиционирования меридиана в системе для трехмерных измерений формы материальных объектов в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
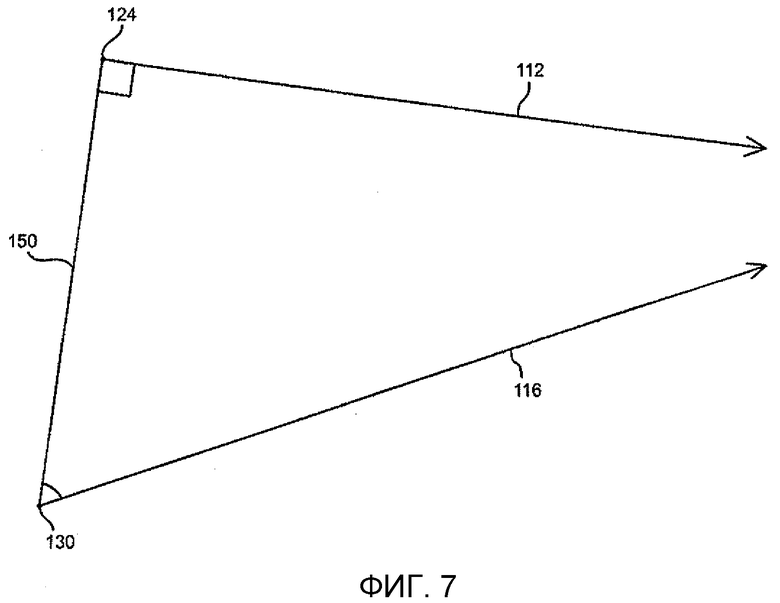
Фиг. 7 представляет собой наглядный пример относительного геометрического позиционирования проектора относительно камеры в системе для трехмерных измерений формы материальных объектов в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
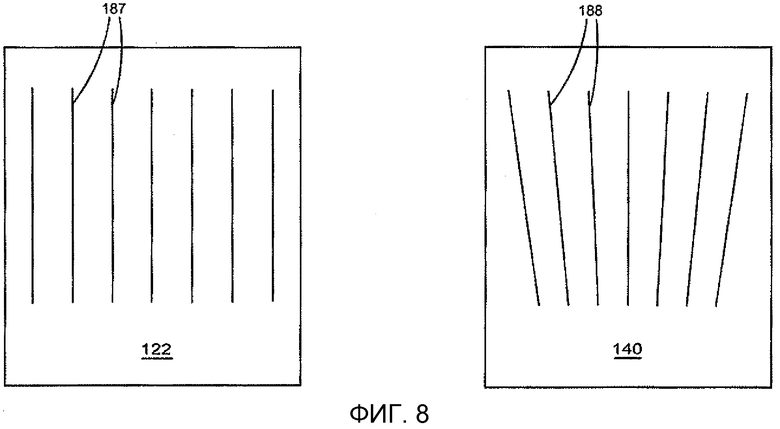
Фиг. 8 представляет собой иллюстрацию положений проектора и камеры для относительного геометрического позиционирования проектора и камеры по фиг. 7.
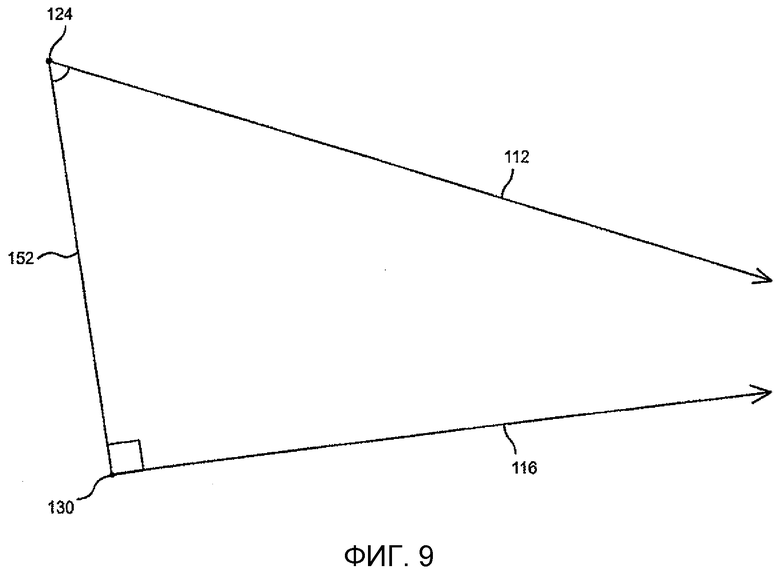
Фиг. 9 представляет собой наглядный пример относительного геометрического позиционирования проектора относительно камеры в системе для трехмерных измерений формы материальных объектов в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
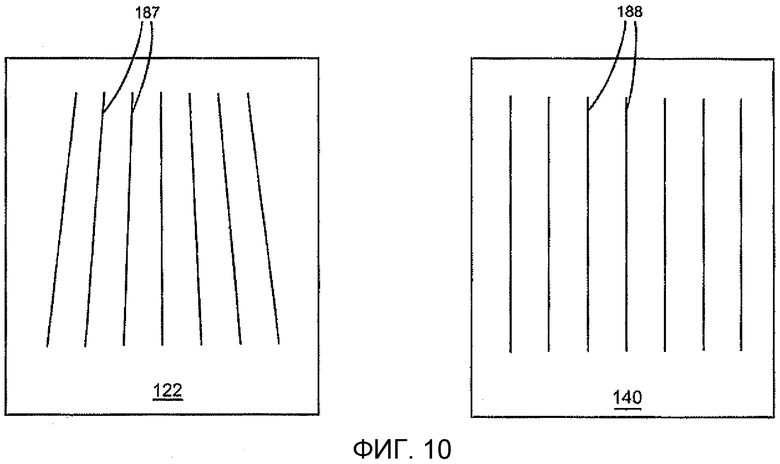
Фиг. 10 представляет собой иллюстрацию положений проектора и камеры для относительного геометрического позиционирования проектора и камеры по фиг. 9.
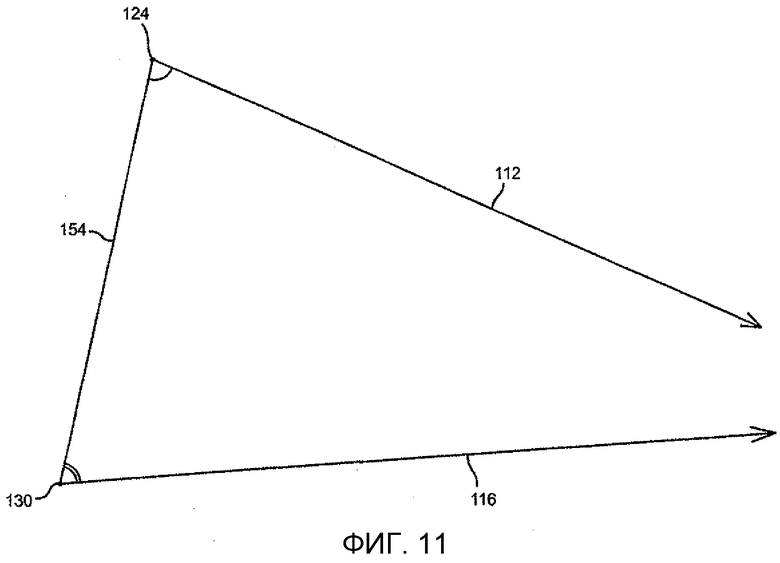
Фиг. 11 представляет собой наглядный пример относительного геометрического позиционирования проектора относительно камеры в системе для трехмерных измерений формы материальных объектов в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
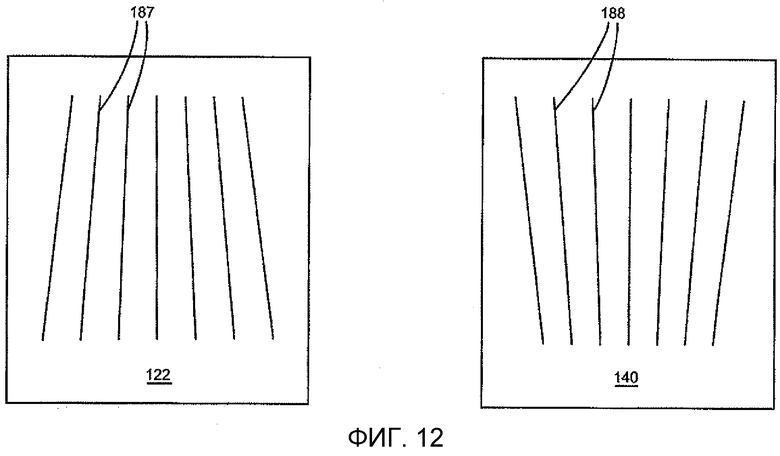
Фиг. 12 представляет собой иллюстрацию положений проектора и камеры для относительного геометрического позиционирования проектора и камеры по фиг. 11.
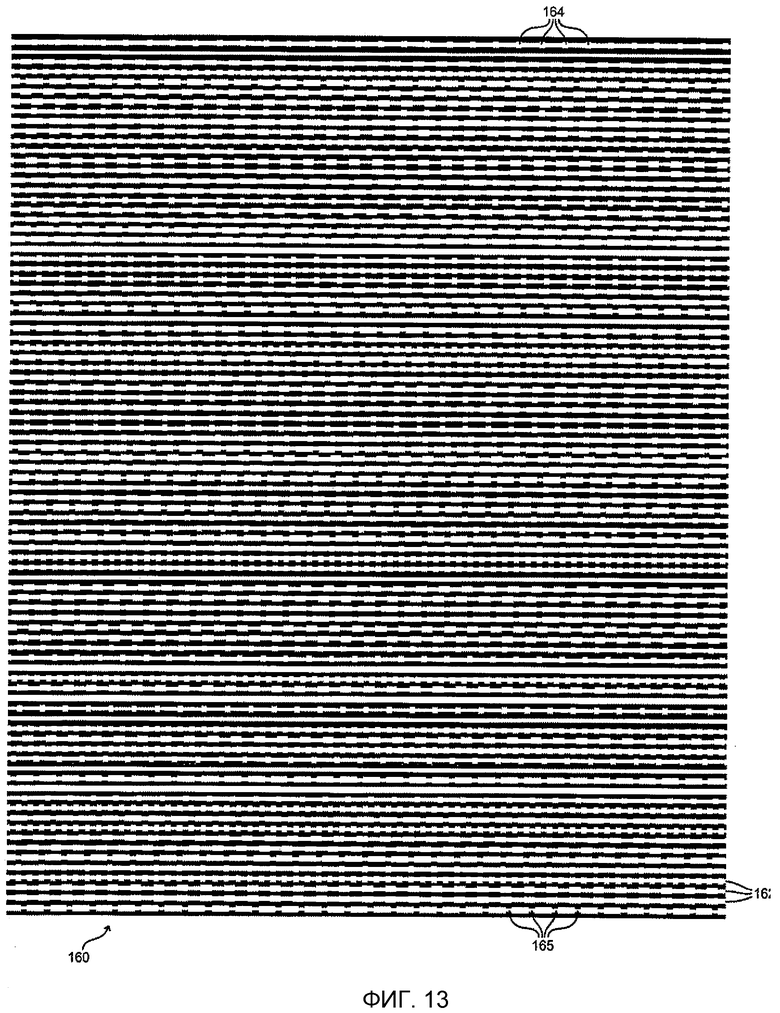
Фиг. 13 представляет собой иллюстрацию структуры света, излучаемого в системе для трехмерных измерений формы материальных объектов в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
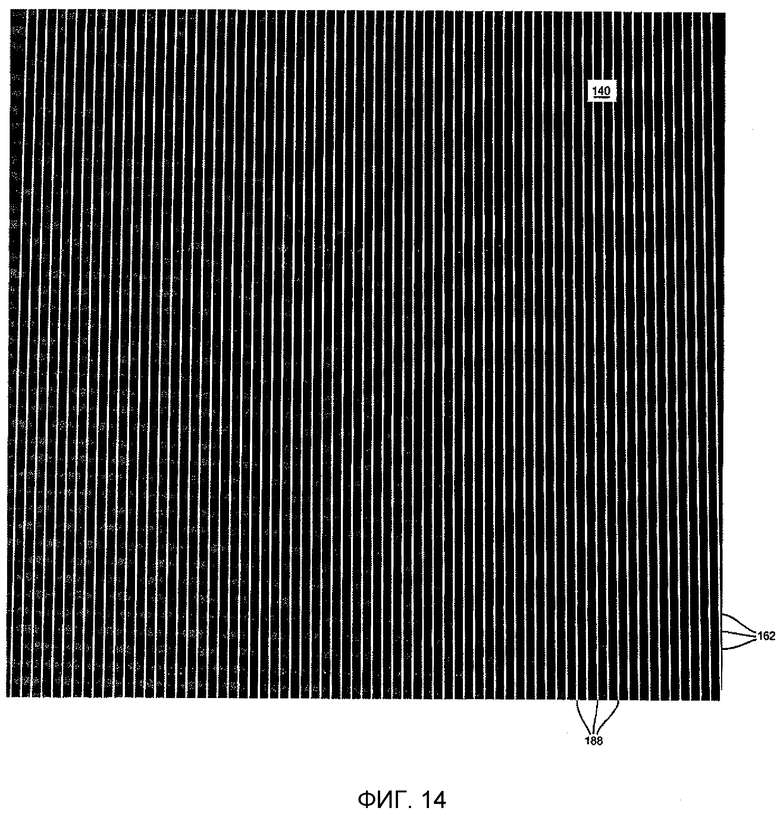
Фиг. 14 представляет собой иллюстрацию снятого репрезентативного изображения, полученного от планарного объекта в соответствии со структурой света по фиг. 13 при относительном позиционировании проектора и камеры по фиг. 7 в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
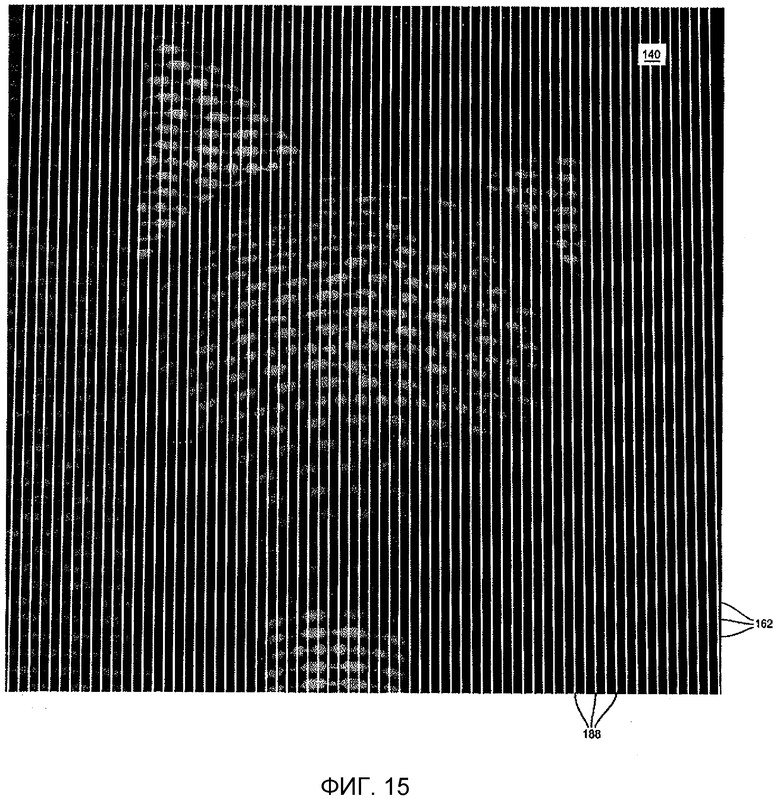
Фиг. 15 представляет собой иллюстрацию снятого репрезентативного изображения, полученного от непланарного объекта в соответствии со структурой света по фиг. 13 при относительном позиционировании проектора и камеры по фиг. 7 в соответствии с одним или большим количеством вариантов выполнения настоящего описания.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее описание включает в общем систему и способ трехмерного измерения формы материальных объектов. Некоторые варианты выполнения, раскрытые в настоящем описании, будут теперь обсуждены со ссылками на вышеупомянутые чертежи, на которых одноименные ссылочные позиции обозначают одни и те же элементы.
Обратимся теперь к фиг. 1, на которой показана общая схема системы 100 для трехмерного измерения формы материальных объектов в соответствии с одним или большим количеством вариантов выполнения настоящего изобретения. Система 100 включает в себя оптический блок 102 и вычислительное устройство 104. Оптический блок 102 излучает структурированный свет одним или несколькими проекторами 106. В одном варианте выполнения проектор 106 представляет собой проектор слайдов, включающий в себя источник света 126 и устройство 122 модуляции света, которое модулирует свет, исходящий из источника света 126. Устройство 122 модуляции света может быть устройством слайдового типа, включающим в себя слайд, жидкокристаллический (ЖК) дисплей, включающий в себя жидкокристаллический экран, или иное устройство для создания структурированного света, которое далее по тексту называется слайдом 122. Проектор дополнительно включает в себя объектив 181, имеющий вершину 124, для проецирования изображения слайда как структурированного света 113 внутри светового конуса 114 на поверхность 110 измеряемого объекта 111. В соответствии с этим и другими вариантами выполнения структурированный свет может создаваться, используя другие способы, такие как интерференционный, муаровый и дифракционный способ генерации света.
В одном или в большем количестве вариантов выполнения проектор 106 проецирует структурированный свет на длине волны, выбранной из волн оптического, видимого или инфракрасного диапазона. В одном или в большем количестве вариантов выполнения проектор 106 является источником непрерывного света.
Оптический блок 102 включает в себя камеру 108 или иное устройство регистрации изображения для съемки изображения структурированного света 113, падающего на поверхность 110 объекта 111. В одном или в большем количестве вариантов выполнения камера 108 включает в себя объектив 180, имеющий вершину 130, матричный приемник излучения 128, а также привод 132 камеры. Объектив 180 формирует изображение на поверхности матричного приемника излучения 128. Привод 132 камеры функционирует как блок управления электронными сигналами и обработки, который управляет работой матричного приемника излучения 128 и может преобразовывать изображение, сформированное приемником 128, в другой формат (например, VGA, bmp, jpeg и т.д.), в какой желательно или необходимо, прежде чем это изображение будет передано на выход 134 камеры. Камера 108 имеет поле зрения 118, которое охватывает часть поверхности 110 объекта 111. Проектор 106 имеет центральную оптическую ось 112 проектора, камера имеет центральную оптическую ось 116 камеры, так что при этом в том месте, где оптическая ось 112 проектора пересекается с оптической осью 116 камеры, образуется угол 120 триангуляции.
Вычислительное устройство 104 анализирует снятое изображение, полученное на выходе 134 камеры, и выполняет необходимые, но ими не ограниченные, вычисления, такие как вычисление трехмерной формы поверхности 110 объекта 111, расстояния до объекта 111 и ориентации снимаемой поверхности 110. Вычислительное устройство 104, кроме того, может управлять проектором 106 и камерой 108, а также включенными в них их различными компонентами.
Теперь применительно к одному или к большему количеству вариантов выполнения будет описано функционирование оптического блока 102 более подробно, со ссылками на показанную на фиг. 2 геометрическую схему. Центр 124 входного и выходного зрачков проекционного объектива 181 проектора 106 в одном или в большем количестве вариантов выполнения вершиной конуса расхождения проецируемого структурированного света 113, в то время как центр 130 входного и выходного зрачков проекционного объектива 180 камеры 108 в одном или в большем количестве вариантов выполнения является вершиной поля зрения 118 камеры.
При использовании способа триангуляции множество точек слайд 122 проецируются на поверхность 110 объекта 111, а затем одна за другой отображаются в соответствующие точки на снятом изображении, которое снято камерой 108. Положение каждой точки на снятом изображении зависит от множества факторов, таких как расстояние до поверхности 110 объекта 111, форма и ориентация поверхности 110 относительно оптического блока 102. Для того чтобы реконструировать форму и положение измеряемой поверхности 110, каждая точка снятого изображения связывается с соответствующей точкой на слайде 122, а затем из координат точек - с использованием техники триангуляции, известной специалистам в данной области, - извлекается форма, положение и/или ориентация поверхности 110. Фиг. 2 иллюстрирует один возможный способ вычисления формы поверхности 110 в некоей точке, основанный на соответствии точек на слайде 122 точкам на снятом приемником излучения 128 изображении.
Обратимся теперь к фиг. 3, которая представляет наглядный пример, показывающий в перспективном виде принцип использования спроецированного изображения и снятого изображения для определения формы поверхности 110 объекта 111. Слайд 122, имеющий картину линий 162, производит амплитудную модуляцию света, спроецированного из источника 126 света, который проецирует эту картину структурированным светом 113 из проектора 106 на поверхность 110 объекта 111. На поверхности 110 появляется картина линий 186. Фотоаппарат 108 записывает соответствующее полученное в результате снятое изображение 140 картины структурированного света 113, падающего на поверхность 110. В этом примере сложность вычислений формы поверхности 110 определяется сложностью идентификации соответствия между линиями 185 в картине в снятом изображении 140 и линиями 162 в картине слайда 122. Иногда может быть трудно определить правильное соответствие между линиями в изображении 140 и на слайде 122 потому, что все линии имеют похожий вид, и трудно сказать, какая из линий 162 на слайде 122 создала данную линию 185 на снятом изображении 140. Кроме того, по мере того, как форма объекта 111 становится более сложной, линии могут ломаться все чаще, и задача нахождения соответствия между линиями на слайде 122 и в снятом изображении 140 становится все более сложной.
Для того, чтобы упростить задачу поиска соответствия между линиями в снятом изображении 140 и на слайде 122, проецируемый свет может быть структурирован с возможностью представления совокупности отличительных элементов, которые могут быть идентифицированы в снятом изображении 140. Введение такой разнородности в снятое изображение 140 называется «кодированием». Фиг. 4А-4С представляют собой несколько наглядных примеров картин кодированного структурированного света 113, используемых в триангуляционной системе с использованием структурированного света, которые могут быть спроецированы на поверхность 110 объекта 111.
Несмотря на наличие кодирования задача идентификации элементов структурированного света в изображении, снятом камерой 108, все еще остается сложной, особенно из-за присутствия перспективного искажения, определенного конечностью расстояний между поверхностью 110 объекта, проектором 106 и камерой 108. Перспективное искажение искривляет снятое изображение 140 структурированного света 113 в двух направлениях и зависит от формы поверхности 110 в каждой точке снятого изображения 140. В результате каждый элемент спроецированного структурированного света 113 в снятом изображении 140 может непредсказуемо сдвинуться, повернуться или скрутиться таким образом, что его идентификация потребует двухмерного анализа этого снятого изображения 140 с учетом всех его возможных деформаций (разворотов, деформаций формы). Сложность, связанная с таким анализом, часто приводит к многочисленным ошибкам регистрации элементов структурированного света в снятом изображении 140, которые приводят к ошибкам измерения формы поверхности 110 объекта. Задача анализа часто требует ресурсоемких алгоритмов поиска, что увеличивает время записи или требует более мощного, а значит, большего по объему и более дорогого вычислительного устройства 104 или вычислительной системы.
В одном или в большем количестве вариантов выполнения система 100 упрощает задачу регистрации элементов структурированного света 113 в изображении 140, снятом камерой 108, ограничением количества направлений, по которым может искажаться структурированный свет, к одному известному направлению, организацией кодовой последовательности структурированного света 113 в этом направлении и использованием специальных способов кодирования структурированного света, достигая тем самым более эффективного и достоверного построения трехмерного изображения.
На основании аффинной эпиполярной геометрии, - если две камеры направлены на один объект или на одну композицию, то через каждую точку на изображении одной камеры можно провести прямую линию, при этом все точки объекта или композиции, соответствующие этой линии, будут лежать на прямой линии на изображении другой камеры независимо от формы этого объекта или композиции. Этот принцип может быть применен к сканированию формы поверхности с использованием триангуляции на основе структурированного света для определения трехмерной формы материальных объектов.
В одном или в большем количестве вариантов выполнения система 100 и связанный с ней способ трехмерного измерения формы материальных объектов использует предположение, что независимо от положения проектора 106 и камеры 108 относительно друг друга, через каждую точку слайда 122 можно провести прямую линию 187, такую, что когда проецируемая картина структурированного света 113 спроецирована на поверхность 110 объекта 111, в изображении 140, снятом камерой 108 независимо от формы снимаемой поверхности 110, существует соответствующая ей прямая линия 188. Любая пара таких линий 187 и 188 образует взаимно-однозначное соответствие, и такие линии далее по тексту будут называться «меридианами» и, в частности, «меридианами 188 камеры» - для изображения, снятого камерой 108, и «меридианами 187 проектора» - для спроецированной от проектора 106 картины структурированного света 113, как это показано в виде примера на фиг. 5. В одном варианте выполнения меридианы 187 проектора и меридианы 188 камеры представляют собой репрезентативные линии, которые могут быть воспроизведены на поверхностях слайда 122 и матричного приемника излучения 128, но на самом деле они не являются частью рисунка, который спроецирован на объект и снят камерой 108.
Как показано на фиг. 6, в одном или в большем количестве вариантов выполнения положение меридианов 187 определяется проецированием структурированного света 113 от объектива 181 проектора на поверхность 110 объекта 111, где каждый из меридианов проектора будет лежать в плоскости 128, которая продолжается от вершины 124 структурированного света 113, спроецированного из проектора 106 на поверхность 110. Каждый из меридианов 188 камеры в матричном приемнике 128 излучения также будет лежать в одной из соответствующих плоскостей 125, которая также продолжается от вершины 130 поля зрения 118 камеры 108 в пространстве объекта 111. Меридианы 187 и 188 проектора и камеры, лежащие в одной и той же плоскости 125 в пространстве объекта 111, образуют соответствующую пару.
Как таковое, есть прямое соотношение между меридианами 187 и 188 проектора и камеры и плоскостями 125, которые продолжаются от вершин 124 и 130. Плоскости 125 можно было бы рассматривать как элементы, подобные световому следу меридианов 187 и 188 проектора и камеры в пространстве объекта 111. Другими словами, меридианы 187 и 188 проектора и камеры могут рассматриваться как изображения плоскостей 125 на слайде 122 и на матричном приемнике излучения 128, сформированные объективами 180 и 181 проектора и камеры.
Притом, что возможно любое количество взаимных положений ориентации между проектором 106, камерой 108 и объектом 111, теперь будет рассмотрено лишь несколько примеров их взаимного расположения для иллюстрации соотношения между меридианами 187 и 188 проектора и камеры в зависимости от позиционирования проектора 106 и камеры 108.
Обращаясь к фиг. 7, в одном или в большем количестве вариантов выполнения линия 150, соединяющая вершину 124 структурированного света 113, спроецированного из проектора 106, с вершиной 130 поля зрения 118 камеры 108, является перпендикулярной к оптической оси 112 проектора. В данном варианте выполнения меридианы 187 проектора являются строго параллельными, при этом иллюстрация меридианов 187 и 188 проектора и камеры, соответствующих данному варианту выполнения, приведена на фиг. 8.
Обращаясь к фиг. 9, в одном или в большем количестве вариантов выполнения линия 152, соединяющая вершину 124 структурированного света 113, спроецированного из проектора 106, с вершиной 130 поля зрения 118 камеры 108, является перпендикулярной к оптической оси 116 камеры. В данном варианте выполнения меридианы 187 проектора являются строго параллельными, при этом иллюстрация меридианов 187 и 188 проектора и камеры, соответствующих данному варианту выполнения, приведена на фиг. 10.
Обращаясь к фиг. 11, в одном или в большем количестве вариантов выполнения линия 154, соединяющая вершину 124 центральной проекции 113 проектора 106, с вершиной 130 центральной проекции 118 камеры 108, не является перпендикулярной ни к оптической оси 112 проектора, ни к оптической оси 116 камеры. В данном варианте выполнения ни меридианы 187 проектора, ни меридианы 188 камеры не должны быть строго параллельными, как показано на фиг. 12.
В одном или в большем количестве вариантов выполнения структурированный свет 113, спроецированный проектором 106, может быть организован таким образом, чтобы ограничить количество возможных направлений и искажений снятого изображения, тем самым упрощая задачу идентификации элементов структурированного света в снятом изображении и, в некоторых случаях, - достигая полной линеаризации алгоритма вычисления формы поверхности. В одном варианте выполнения количество возможных направлений искажений между меридианами ограничено до одного.
В одном или в большем количестве вариантов выполнения слайд 122 выбран таким образом, что этот структурированный свет 113 сформирован, располагая по меньшей мере двумя закодированными элементами, которые лежат в плоскости 125, проходящей через вершины 124, 130 проектора 106 и камеры 108. В одном или в большем количестве вариантов выполнения структурированный свет 113 может быть сформирован в виде картины, включающий в себя множество различных групп кодированных элементов, в которых все из этих кодированных элементов в каждой группе лежат в одной и той же соответствующей плоскости 125, проходящей через вершины 124, 130 проектора 106 и камеры 108. Разные группы кодированных элементов будут лежать в разных плоскостях 125. В одном или в большем количестве вариантов выполнения такие кодированные элементы могли бы быть представлены областями изменяющегося вида, формы и/или длины. Например, обращаясь к наглядному варианту выполнения, показанному на фиг. 8, структурированный свет сформирован как структура 160, обладающая двумя кодированными элементами 164 и 165, представленными областями с различной толщиной. Кодированные элементы расположены один за другим вдоль множеств параллельных линий 162, так что их последовательность в каждой линии 162 образует сплошную линию с участками переменной длины с переменными толщинами. В то же время, все кодированные элементы лежат на множестве параллельных меридианов 187, которые вместе с линиями 162 образуют решетку. Таким образом, группа, включающая в себя последовательность кодированных областей 164 и 165 различной толщины, вдоль каждого меридиана 187 образует уникальную последовательность в смысле чередования кодированных областей 164 и 165 в другом соседнем меридиане 187. Понятно, что могут быть созданы другие типы картин для генерации кодированных элементов или кодированных областей 164 и 165 в структурированном свете.
На фиг. 14 и 15 показаны записанные камерой 108 участки репрезентативных снятых изображений 140, полученных с использованием такой световой структуры 160, которая показана на фиг. 13, и основанных на относительном взаимном позиционировании проектора 106 и камеры 108 по фиг. 7, для репрезентативных планарных объектов (фиг. 14) и непланарных объектов (фиг. 15). На этих иллюстрациях можно видеть, что группы кодированных элементов 164 и 165, каждая из которых в слайде 122 лежит на соответствующем меридиане 187 проектора, будут также лежать на соответствующем меридиане 188 камеры и на изображении 140 (на этих иллюстрациях меридианы 187 проектора и меридианы 188 камеры показаны в виде вертикальных линий). Особенная анализируемая форма поверхности 110 объекта 111 будет вызывать лишь перемещение кодированных элементов 164 и 165 на изображении 140 в направлении вдоль длины меридианов 188 камеры. Затем, анализируя перемещения и/или положение кодированных элементов 164 вдоль длины меридианов 188 камеры по отношению к положению соответствующих кодированных элементов 164 и 165 в слайде 122, а также по отношению к перемещению и/или положению других кодированных элементов 164 и 165 в той же самой группе кодированных элементов 164 и 165 вдоль тех же самых или других меридианов 188 камеры, могут быть проведены желательные трехмерные измерения поверхности 110
Структура 160 может быть использована для любых описанных здесь вариантов выполнения. Для того, чтобы ее можно было использовать в конкретном варианте выполнения, структура 160 должна быть «встроена» в поле слайда 122 изменением масштаба, сдвигом или другим ее изменением. Кроме того, структура 160 может быть искажена сколь необходимо, так чтобы группы кодированных элементов 164 структуры 160 совпадали с меридианами, выбранными для конкретного варианта выполнения.
Вычислительная система 104 может включать в себя универсальную компьютерную систему, пригодную для выполнения способа трехмерного измерения формы материальных объектов в соответствии с настоящим описанием. Вычислительная система 104 представляет собой только один пример подходящего компьютерного окружения, и не предполагается, что она устанавливает какое-либо ограничение на объем использования или функциональность настоящего изобретения. В различных вариантах выполнения настоящая система и способ трехмерного измерения формы материальных объектов являются работоспособными в многочисленных компьютерных окружениях или конфигурациях как универсального, так и специализированного назначения. Примерами хорошо известных компьютерных систем, окружений и/или конфигураций, которые могут быть пригодны для использования с настоящим изобретением, но которые не ограничиваются лишь ими, являются персональные компьютеры, компьютеры-серверы, ручные или портативные устройства, мультипроцессорные системы, системы, построенные на микропроцессорах, бытовые программируемые электронные устройства, сетевые персональные компьютеры, миникомпьютеры, главные компьютеры («мейнфрейм»), распределенные компьютерные окружения, которые включают в себя любую из вышеупомянутых систем, устройств и им подобное.
В различных вариантах выполнения алгоритмы триангуляции и способ трехмерного измерения формы материальных объектов могут быть описаны в общем контексте машиноисполняемых инструкций, таких как исполняемые на компьютере программные модули. Программные модули в общем включают в себя процедуры, программы, объекты, компоненты, структуры данных и т.д., которые выполняют конкретные задачи или обрабатывают конкретные типы абстрактных данных. Эти алгоритмы и способы могут быть также применены в распределенных компьютерных окружениях, в которых задачи решаются удаленными обрабатывающими устройствами, которые соединены между собой сетями связи. В распределенных компьютерных окружениях программные модули могут быть расположены в носителях информации как локальных, так и удаленных компьютеров, содержащих устройства памяти. В одном варианте выполнения компьютерная система производит выполнение трехмерного измерения формы объектов выполнением одного или большего количества компьютерных программ. Компьютерные программы могут храниться в запоминающей среде или на носителе, таком как память, и/или ОЗУ, или они могут быть заведены на центральный процессор по сети связи или по другим соединениям входа-выхода.
Система и способ, построенные в соответствии с описанными здесь вариантами выполнения, выполняют трехмерное измерение формы материальных объектов с использованием бесконтактной триангуляции на основе структурированного света. Такая система и такой способ позволяют произвести быстрое и точное измерение координат точечного множества (то есть, световой структуры), спроецированного на поверхность материальных объектов со сложной формой, в одной координатной системе, привязанной к этой системе. Эти способы могут быть применимы к целому ряду научных и инженерных задач, которые требуют получения точных данных о форме поверхности объекта, расстоянии до этой поверхности или об ее пространственной ориентации. Настоящая система и способ имеют полезные применения во многих областях, включая, но этим не ограничиваясь, получение цифровых изображений, формирование формы элементов, компьютерная анимация, запоминание формы объектов, имеющих культурное, историческое или научное значение, распознавание формы, топография, техническое зрение, медицинские процедуры, специальное позиционирование устройств и роботов и т.д.
Система содержит световой проектор для проецирования на поверхность объекта картины структурированного света, устройство съемки изображения упомянутой картины и вычислительное устройство для определения формы объекта. Проектор содержит источник света, слайд с картиной слайда и объектив, характеризующийся вершиной объектива. Устройство съемки изображения содержит объектив, характеризующийся вершиной объектива. Форму объекта определяют с использованием триангуляционного алгоритма, основанного на соответствии между точками на картине слайда и упомянутом изображении. Картина слайда содержит множество кодированных элементов, характеризующихся параметром, определяющим форму, длину или толщину кодированного элемента. Кодированные элементы распределены в первую или вторую группу. На поверхности слайда определены первая и вторая воображаемые линии слайда. Первая воображаемая линия определена пересечением между поверхностью слайда и первой плоскостью, проходящей через вершины объективов. Вторая воображаемая линия определена пересечением между поверхностью слайда и второй плоскостью, проходящей через вершины объективов. Кодированные элементы первой и второй групп расположены вдоль первой и второй воображаемых линий. Технический результат - обеспечение быстрого и точного измерения координат световой структуры, спроецированной на поверхность сложной формы. 2 н. и 18 з.п. ф-лы, 17 ил.
1. Система для трехмерного измерения формы материального объекта, содержащая:
- световой проектор для проецирования картины структурированного света на поверхность упомянутого объекта, причем упомянутый световой проектор содержит источник света, слайд с картиной слайда, расположенной на поверхности слайда, и объектив проектора, характеризующийся вершиной объектива проектора;
- устройство съемки изображения упомянутой картины структурированного света, отраженной на упомянутом объекте, причем упомянутое устройство съемки изображения содержит объектив устройства, характеризующийся вершиной объектива устройства; и
- вычислительное устройство для определения измерения, относящегося к форме упомянутого объекта, с использованием триангуляционного алгоритма, основанного на соответствии между точками на упомянутой картине слайда и упомянутом изображении, и
причем картина слайда содержит множество кодированных элементов, причем каждый из упомянутых кодированных элементов характеризуется по меньшей мере одним параметром и при этом упомянутый по меньшей мере один параметр определяет форму, длину или толщину кодированного элемента, и
при этом упомянутые кодированные элементы распределены в одну из по меньшей мере первой группы или второй группы, причем каждая из упомянутой первой группы и второй группы содержит по меньшей мере два из упомянутых кодированных элементов, и
при этом на упомянутой поверхности слайда определены по меньшей мере первая воображаемая линия слайда и вторая воображаемая линия слайда, причем упомянутая первая воображаемая линия слайда определена пересечением между упомянутой поверхностью слайда и первой плоскостью, проходящей через упомянутую вершину объектива проектора и через упомянутую вершину объектива устройства, и упомянутая вторая воображаемая линия слайда определена пересечением между упомянутой поверхностью слайда и второй плоскостью, проходящей через упомянутую вершину объектива проектора и через упомянутую вершину объектива устройства, и
при этом упомянутые кодированные элементы упомянутой первой группы расположены вдоль упомянутой первой воображаемой линии и упомянутые кодированные элементы упомянутой второй группы расположены вдоль упомянутой второй воображаемой линии.
2. Система по п.1, в которой на упомянутой поверхности упомянутого объекта определены по меньшей мере первая воображаемая линия объекта и вторая воображаемая линия объекта, причем упомянутая первая воображаемая линия объекта определена пересечением между упомянутой поверхностью упомянутого объекта и упомянутой первой плоскостью, и при этом упомянутая вторая воображаемая линия объекта определена пересечением между упомянутой поверхностью упомянутого объекта и упомянутой второй плоскостью.
3. Система по п.1, в которой световой проектор дополнительно характеризуется центральной оптической осью, в которой дополнительно световой проектор и устройство съемки изображения установлены таким образом, что линия, проходящая между вершиной светового проектора и вершиной устройства, является перпендикулярной центральной оптической оси светового проектора.
4. Система по п.1, в которой устройство съемки изображения характеризуется центральной оптической осью, в которой дополнительно световой проектор и устройство съемки изображения установлены таким образом, что линия, проходящая между вершиной светового проектора и вершиной устройства, является перпендикулярной центральной оптической оси устройства съемки изображения.
5. Система по п.1, в которой световой проектор характеризуется центральной оптической осью светового проектора, и при этом устройство съемки изображения характеризуется центральной оптической осью устройства, причем дополнительно световой проектор и устройство съемки изображения установлены таким образом, что линия, проходящая между вершиной светового проектора и вершиной устройства, не является перпендикулярной ни оптической оси светового проектора, ни оптической оси устройства.
6. Система по п.1, в которой световой проектор проецирует структурированный свет с длинами волн, выбранными из длин волн оптического, видимого и инфракрасного диапазона.
7. Система по п.1, в которой световой проектор является источником света в виде импульсной лампы.
8. Система по п.1, в которой картина структурированного света содержит множество кодированных элементов, которые могут быть разнообразно сгруппированы вместе таким образом, что все кодированные элементы в каждой группе образуют уникальную последовательность относительно последовательностей кодированных элементов в соседних группах кодированных элементов.
9. Система по п.1, в которой вычислительное устройство определяет трехмерную форму поверхности упомянутого объекта.
10. Система по п.1, в которой упомянутый по меньшей мере один параметр определяет форму или размер для по меньшей мере одного из упомянутых кодированных элементов.
11. Способ трехмерного измерения формы материального объекта, содержащий этапы, на которых:
- проецируют картину структурированного света из светового проектора на поверхность объекта, причем световой проектор содержит источник света, слайд с картиной слайда, расположенной на поверхности слайда, и объектив проектора, характеризующийся вершиной объектива проектора;
- снимают изображение картины структурированного света, отраженного на поверхности объекта, посредством устройства для съемки изображения, причем упомянутое устройство для съемки изображения содержит объектив устройства, характеризующийся вершиной объектива устройства;
- определяют измерение, относящееся к поверхности объекта, с использованием триангуляционного алгоритма, основанного на соответствии между точками на упомянутой картине слайда и упомянутом изображении, и
причем упомянутая картина слайда содержит множество кодированных элементов, причем каждый из упомянутых кодированных элементов характеризуется по меньшей мере одним параметром и при этом упомянутый по меньшей мере один параметр определяет форму, длину или толщину кодированного элемента, и
при этом упомянутые кодированные элементы распределены в одну из по меньшей мере первой группы или второй группы, причем каждая из упомянутой первой группы и второй группы содержит по меньшей мере два из упомянутых кодированных элементов, и
при этом на упомянутой поверхности слайда определены по меньшей мере первая воображаемая линия слайда и вторая воображаемая линия слайда, причем упомянутая первая воображаемая линия слайда определена пересечением между упомянутой поверхностью слайда и первой плоскостью, проходящей через упомянутую вершину объектива проектора и через упомянутую вершину объектива устройства, и упомянутая вторая воображаемая линия слайда определена пересечением между упомянутой поверхностью слайда и второй плоскостью, проходящей через упомянутую вершину объектива проектора и через упомянутую вершину объектива устройства, и
при этом упомянутые кодированные элементы упомянутой первой группы расположены вдоль упомянутой первой воображаемой линии и упомянутые кодированные элементы упомянутой второй группы расположены вдоль упомянутой второй воображаемой линии.
12. Способ по п.11, в котором на упомянутой поверхности упомянутого объекта определены по меньшей мере первая воображаемая линия объекта и вторая воображаемая линия объекта, причем упомянутая первая воображаемая линия объекта определена пересечением между упомянутой поверхностью упомянутого объекта и упомянутой первой плоскостью, и при этом упомянутая вторая воображаемая линия объекта определена пересечением между упомянутой поверхностью упомянутого объекта и упомянутой второй плоскостью.
13. Способ по п.11, в котором световой проектор дополнительно характеризуется центральной оптической осью, дополнительно содержащий этап, на котором устанавливают световой проектор и устройство съемки изображения таким образом, что линия, проходящая между вершиной светового проектора и вершиной устройства, является перпендикулярной центральной оптической оси светового проектора.
14. Способ по п.11, в котором устройство съемки изображения характеризуется центральной оптической осью, дополнительно содержащий этап, на котором устанавливают световой проектор и устройство съемки изображения таким образом, что линия, проходящая между вершиной светового проектора и вершиной устройства, является перпендикулярной центральной оптической оси устройства съемки изображения.
15. Способ по п.11, в котором световой проектор характеризуется центральной оптической осью светового проектора, и при этом устройство съемки изображения характеризуется центральной оптической осью устройства, дополнительно содержащий этап, на котором устанавливают световой проектор и устройство съемки изображения таким образом, что линия, проходящая между вершиной светового проектора и вершиной устройства, не является перпендикулярной ни центральной оптической оси светового проектора, ни центральной оптической оси устройства.
16. Способ по п.11, дополнительно содержащий этап, на котором проецируют структурированный свет с длинами волн, выбранными из длин волн оптического, видимого и инфракрасного диапазона.
17. Способ по п.11, дополнительно содержащий этап, на котором проецируют структурированный свет из источника света в виде импульсной лампы.
18. Способ по п.11, в котором картина структурированного света содержит множество кодированных элементов, которые могут быть разнообразно сгруппированы вместе таким образом, что все кодированные элементы в каждой группе образуют уникальную последовательность относительно последовательностей кодированных элементов в соседних группах кодированных элементов.
19. Способ по п.11, дополнительно содержащий этап, на котором определяют трехмерную форму поверхности упомянутого объекта.
20. Способ по п.11, в котором упомянутый по меньшей мере один параметр определяет форму или размер для по меньшей мере одного из упомянутых кодированных элементов.
| US 2003223083 A1, 04.12.2003 | |||
| US 4648717 A, 10.03.1987 | |||
| JP 2007163266 A, 28.06.2007 | |||
| US 6751344 B1, 15.06.2004 |

