Заявляемое техническое решение относится к измерительной технике и может быть использовано в системах ориентации и навигации.
Известен «Маятниковый компенсационный акселерометр» (патент US 6422076 В1, МПК G01P 15/13, опубл. 23.07.2002), содержащий корпус, в котором расположен маятниковый блок, выполненный в виде единой пластины монокристаллического кремния, который содержит подвижную лопатку на упругом подвесе и опорную рамку с выступами. На противоположных сторонах подвижной лопатки закреплены две магнитные системы и две катушки вращающего устройства, которые расположены с зазором относительно сердечника и закреплены на соответствующей стороне подвижной лопатки. Упругий подвес содержит гибкие элементы, расположенные под углом 90 градусов относительно друг друга, симметрично относительно оси симметрии маятникового устройства. Когда акселерометр ускоряется, подвижная лопатка отклоняется в направлении, противоположном ускорению, и ток в катушках возвращает подвижную лопатку в исходное положение. Измеренный ток в катушках используется для определения ускорения.
Недостатком известного аналога является высокая нелинейность и, как следствие, низкая точность.
Известен «Линейный микроакселерометр» (патент РФ 2410703, МПК G01P 15/08, опубл. 27.01.2011), содержащий корпус, крышку, две инерционные массы на упругих подвесах, выполненные в виде прямоугольных пластин из монокристаллического кремния и расположенные в одной плоскости последовательно друг за другом вдоль оси чувствительности с возможностью линейного перемещения. Два датчика положения для каждой инерционной массы выполнены в виде двух пар излучателей и фотоприемников. Первые из них расположены в отверстиях крышки над прямоугольными пластинами, а вторые - соосно с ними размещены в корпусе. При этом каждая пара фотоприемников соединяется с соответствующим ей компаратором. Выходы компараторов соединены с ключами, к которым также подсоединен стабилизированный источник тока. Выходы ключей через упругие подвесы соединены с токопроводящими дорожками компенсационных преобразователей, выполненных в виде двух постоянных магнитов, размещенных на крышке и корпусе, и токопроводящих дорожек, напыленных на поверхности прямоугольных пластин перпендикулярно оси чувствительности. Изобретение позволяет повысить точность измерения за счет введения режима автоколебаний.
Недостатком известного аналога является узкая полоса пропускания, а также необходимость размещения излучателя и фотоприемников в непосредственной близости к инерционной массе, что приводит к низкой точности измерения ускорения.
Наиболее близким из числа известных технических решений является «Линейный микроакселерометр» (патент РФ 2561303, С1 МПК G01P 15/08, опубл. 27.08.2015), содержащий основание, крышку, рамку с инерционной массой, выполненной из кремния, установленную с возможностью линейного перемещения на упругих подвесах вдоль продольной оси, датчик положения и источник напряжения, отличающийся тем, в устройство дополнительно введены два компаратора, два усилителя тока, ключ, электромагнитный силовой привод, состоящий из 2N катушек, размещенных на 2N магнитопроводящих сердечниках с явно выраженными полюсами, направленными к торцевым сторонам инерционной массы, при этом магнитопроводящие сердечники размещены на противоположных торцевых сторонах рамки по N с каждой стороны, а на поверхности инерционной массы в области каждого из торцов расположены магнитопроводы, замыкающие магнитные потоки катушек, причем входы катушек подключены к выходу ключа, входы которого через компараторы подключены к датчику положения, который выполнен оптическим и состоит из излучателя и фотоприемников, при этом излучатель подключен к источнику напряжения, а между излучателем и фотоприемниками расположена оптическая щель.
Недостатком прототипа является сложная конструкция упругих подвесов и их большая длина, необходимость размещения излучателя и фотоприемников в непосредственной близости к инерционной массе, а также узкая полоса пропускания, и как следствие, низкая точность измерения ускорения.
Задачей является создание линейного микроакселерометра, измеряющего ускорения с более высокой точностью.
Технический результат, обеспечивающий решение задачи, состоит в повышении точности измерения ускорения.
Технический результат достигается тем, что в линейном микроакселерометре, содержащем основание, рамку с инерционной массой, закрепленной на упругих подвесах, датчик положения, источник напряжения, четыре компаратора, два усилителя тока, ключ, электромагнитный силовой привод, состоящий из 2N катушек, размещенных на 2N магнитопроводящих сердечниках, которые размещены с противоположных сторон рамки по N с каждой стороны, а на поверхности инерционной массы с каждой стороны расположены магнитопроводы, замыкающие магнитные потоки катушек, причем входы катушек подключены к выходу ключа, входы которого через компараторы подключены к датчику положения, который выполнен оптическим и состоит из излучателя, подключенного к источнику напряжения и двух фотоприемников, между излучателем и фотоприемниками расположены четыре оптических кабеля, а инерционная масса выполнена в виде маятника с возможностью совершения крутильных колебаний на упругих подвесах вокруг одной оси и содержит две заслонки, установленные с возможностью перекрытия светового потока между излучателем и фотоприемниками, размещенными на основании.
Технический результат достигается за счет того, что выполнение инерционной массы в виде маятника позволяет ей совершать более устойчивые крутильные колебания на упругих подвесах вокруг одной оси под действием знакопеременного сигнала постоянного тока, формируемого в цепи обратной связи электромагнитного силового привода, управляемого оптическим датчиком положения, а применение четырех оптических кабелей позволяет более точно фиксировать ее положение. Наличие входного воздействия приводит к смещению центра колебаний и возникновению временной модуляции сигнала. Измерение временной модуляции сигнала позволяет дополнительно повысить точность измерения ускорения.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного углового акселерометра, отсутствуют, следовательно, заявленное изобретение соответствует условию «новизна».
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, следовательно, заявленное изобретение соответствует «изобретательскому уровню».
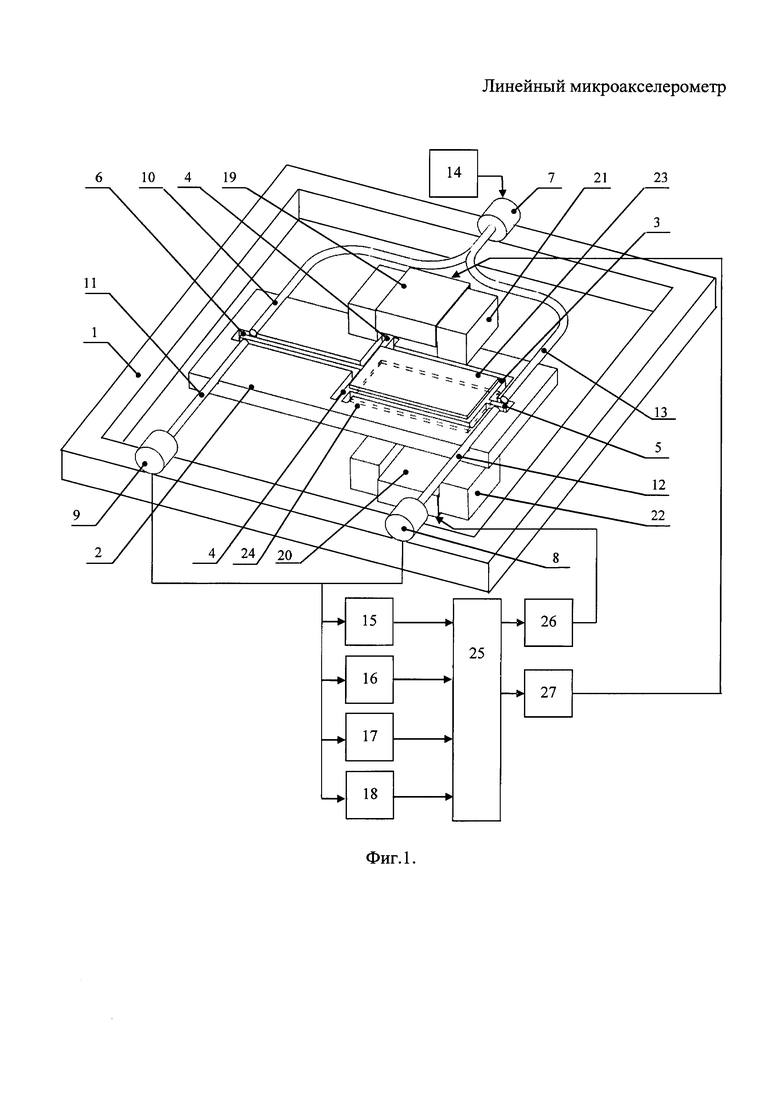
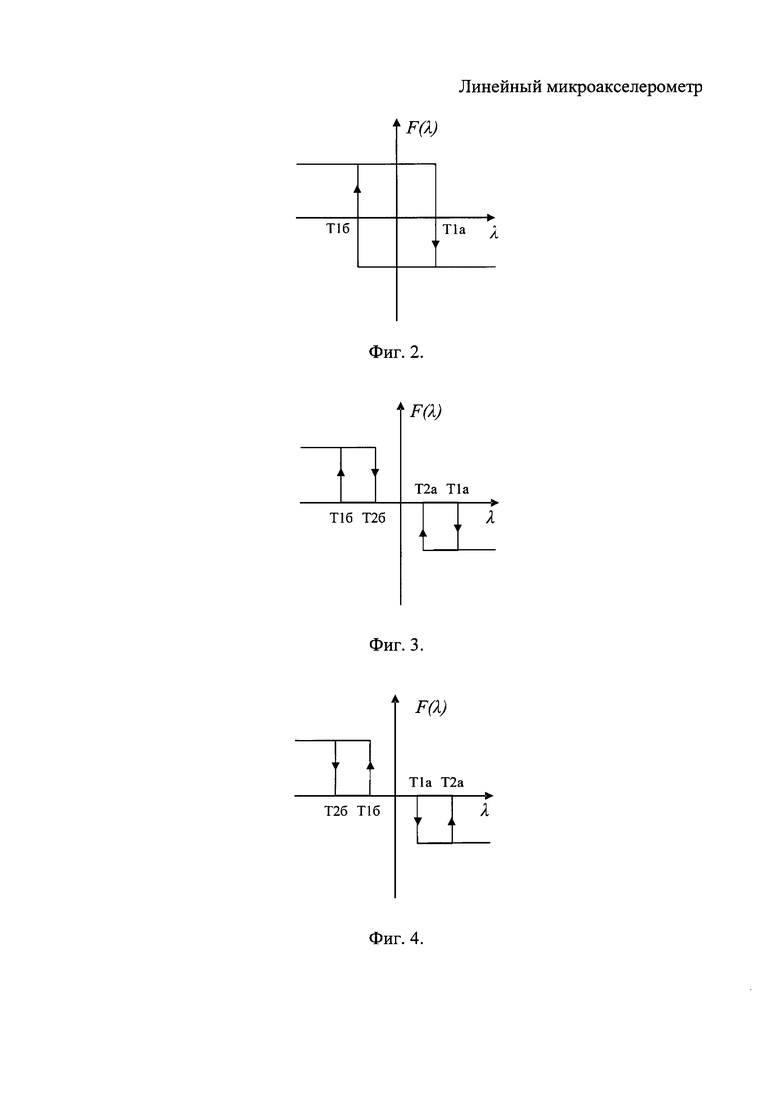
Сущность технического решения поясняется чертежами, где на фиг. 1 представлена конструктивная схема устройства, на фиг. 2 - релейный закон управления, на фиг. 3 - закон управления с запаздыванием, на фиг. 4 - закон управления с опережением и введены следующие обозначения:
1. Основание
2. Рамка
3. Инерционная масса
4. Упругие подвесы
5. Заслонка
6. Заслонка
7. Излучатель
8. Фотоприемник
9. Фотоприемник
10. Волоконно-оптический кабель
11. Волоконно-оптический кабель
12. Волоконно-оптический кабель
13. Волоконно-оптический кабель
14. Источник напряжения
15. Компаратор
16. Компаратор
17. Компаратор
18. Компаратор
19. Катушка
20. Катушка
21. Магнитопроводящий сердечник
22. Магнитопроводящий сердечник
23. Магнитопровод
24. Магнитопровод
25. Ключ
26. Усилитель тока
27. Усилитель тока.
Предлагаемый линейный микроакселерометр состоит из основания 1, рамки 2 с инерционной массой 3, закрепленной на упругих подвесах 4 и содержащей две заслонки 5 и 6. Оптический датчик положения инерционной массы 3 выполнен из излучателя 7, фотоприемников 8, 9 и волоконно-оптических кабелей 10, 11, 12, 13, при этом излучатель 7 подключен к источнику напряжения 14, а фотоприемники 8 и 9 подключены к компараторам 15, 16, 17 и 18. Электромагнитный силовой привод состоит из 2N катушек 19, 20, размещенных на 2N магнитопроводящих сердечниках 21, 22 с явно выраженными полюсами, направленными к торцевым сторонам инерционной массы 3, при этом магнитопроводящие сердечники 21, 22 размещены с противоположных сторон инерционной массы 3 по N с каждой стороны, а на поверхности инерционной массы 3 с каждой стороны расположены магнитопроводы 23, 24. Катушки 19 и 20 подключены к выходу ключа 25 через усилители тока 26 и 27 соответственно. Входы ключа 25 соединены с компараторами 15, 16, 17 и 18.
Основание 1, рамка 2, инерционная масса 3 и упругие подвесы 4 выполнены, например, из монокристаллического или поликристаллического кремния или кварца.
Излучатель 7 выполнен, например, на основе серийно выпускаемого лазерного диода LFO-401 фирмы ФТИ-Оптроник [1], рассчитанного на длину волны 1300 нм либо любого совместимого с выбранным типом оптоволокна.
Фотоприемники 8 и 9 выполнены, например, на основе серийно выпускаемых фотодиодов ТМС-1С31-000 фирмы TrueLight [2], рассчитанных на длину волны 1300 нм либо любых совместимых с выбранным типом оптоволокна.
Волоконно-оптические кабели 10, 11, 12 и 13 могут быть одномодовыми или многомодовыми, например, со стандартным диаметром оболочки 125 мкм и стандартным диаметром сердцевины 9, 50 или 62.5 мкм.
Источник напряжения 14 выполнен, например, на основе серийно выпускаемой микросхемы (источника напряжения) Mitsubishi Electric М5294 [3].
Ключ 25 выполнен, например, на основе серийно выпускаемой микросхемы NJM2520V [4] либо на основе микросхем, работающих в режиме асинхронного RS-триггера.
Усилители тока 26, 27 выполнены, например, на основе серийно выпускаемой микросхемы (операционного усилителя) Mitsubishi Electric М5216 [5].
Компараторы 15, 16, 17 и 18 выполнены, например, на основе серийно выпускаемой микросхемы (компаратора) Mitsubishi Electric М51203 [4]. Компараторы подбираются таким образом, чтобы посылать сигнал на ключ 25 в соответствии с выбранным законом управления, который может быть релейным (фиг. 2), с запаздыванием (фиг. 3) или с опережением (фиг. 4), для этого они могут реагировать на низкий или высокий уровень сигнала с фотоприемников 8 и 9, а также на фронт или срез этого сигнала.
Волоконно-оптические кабели 10, 11, 12, 13 закреплены в углублениях в рамке таким образом, чтобы при колебаниях инерционной массы заслонки попеременно перекрывали световой поток между излучателем 7 и фотоприемниками 8 и 9. При этом форма заслонок 5 и 6 подбирается таким образом, чтобы моменты срабатывания компараторов 15, 16, 17 и 18 из-за изменения светового потока точно соответствовали выбранному закону управления, для этого добавляются углубления и/или выступы на поверхности заслонок 5 и 6.
Работа устройства разделяется на три стадии в зависимости от закона управления.
Работа с использованием релейного закона управления (фиг. 3):
1.1. Выход в рабочий режим.
После включения питания основание 1 и инерционная масса 3 в рамке 2 находятся в состоянии покоя. Ключ 25 находится в предустановленном состоянии «1». Напряжение с выхода ключа 25 начинает поступать на первый усилитель тока 26. Созданный им в первой катушке 19 электрический ток наводит в первом магнитопроводящем сердечнике 21 магнитное поле, которое, стремясь замкнуться через первый магнитопровод 23, притягивает инерционную массу 3. В результате инерционная масса 3 поворачивается на упругих подвесах 4 в сторону первой катушки 19 до тех пор, пока заслонка 6 не перекроет световой поток, проходящий по волоконно-оптическим кабелям 10 и 11 между излучателем 7, питающимся от источника напряжения 14, и фотоприемником 9. В тот момент, когда заслонка 6 перекрывает световой поток, сигнал с фотоприемника 9, преобразованный компараторами 15, 16, 17 и 18, переводит ключ 25 в состояние «-1», в результате чего напряжение с выхода ключа 25 начинает поступать на второй усилитель тока 27, сигнал с которого поступает на вторую катушку 20. При этом выключается первый усилитель тока 26, сигнал с которого перестает поступать на первую катушку 19. Созданный вторым усилителем тока 27 во второй катушке 20 электрический ток наводит во втором магнитопроводящем сердечнике 22 магнитное поле, которое, стремясь замкнуться через второй магнитопровод 24, притягивает инерционную массу 3 ко второй катушке 20. После выполнения п. 1.1 начинается первый полупериод п. 1.2.
1.2. Первый полупериод.
Инерционная масса 3 по инерции продолжает поворачиваться на упругих подвесах 4 в сторону первой катушки 19 до тех пор, пока сила упругости и сила притяжения инерционной массы 3 ко второй катушке 20 не уравновесит импульс инерционной массы 3. После чего инерционная масса 3 под действием силы упругости начинает движение ко второй катушке 20 до тех пор, пока заслонка 5 не перекроет световой поток, проходящий по волоконно-оптическим кабелям 12 и 13 между излучателем 7, питающимся от источника напряжения 14, и фотоприемником 8. В тот момент, когда заслонка 5 перекрывает световой поток, сигнал с фотоприемника 8, преобразованный компараторами 15, 16, 17 и 18, переводит ключ 25 в состояние «1», в результате чего напряжение с выхода ключа 25 начинает поступать на первый усилитель тока 26, сигнал с которого поступает на первую катушку 19. При этом выключается второй усилитель тока 27, сигнал с которого перестает поступать на вторую катушку 20. Созданный первым усилителем тока 26 в первой катушке 19 электрический ток наводит в первом магнитопроводящем сердечнике 21 магнитное поле, которое, стремясь замкнуться через первый магнитопровод 23, притягивает инерционную массу 3 к первой катушке 19. Начинается второй полупериод (п. 1.3).
1.3. Второй полупериод.
Инерционная масса 3 по инерции продолжает поворачиваться на упругих подвесах 4 в сторону второй катушки 20 до тех пор, пока сила упругости и сила притяжения инерционной массы 3 к первой катушке 19 не уравновесит импульс инерционной массы 3. После чего инерционная масса 3 под действием силы упругости начинает движение к первой катушке 19 до тех пор, пока заслонка 6 не перекроет световой поток, проходящий по волоконно-оптическим кабелям 10 и 11 между излучателем 7, питающимся от источника напряжения 14, и фотоприемником 9. В тот момент, когда заслонка 6 перекрывает световой поток, сигнал с фотоприемника 9, преобразованный компараторами 15, 16, 17 и 18, переводит ключ 25 в состояние «-1», в результате чего напряжение с выхода ключа 25 начинает поступать на второй усилитель тока 27, сигнал с которого поступает на вторую катушку 20. При этом выключается первый усилитель тока 26, сигнал с которого перестает поступать на первую катушку 19. Созданный вторым усилителем тока 29 в первой катушке 19 электрический ток наводит во втором магнитопроводящем сердечнике 22 магнитное поле, которое, стремясь замкнуться через второй магнитопровод 24, притягивает инерционную массу 3 ко второй катушке 20. Начинается первый полупериод (п. 1.2), и цикл повторяется заново.
Тем самым инерционная масса 3 начинает совершать автоколебания на собственной частоте согласно релейному закону управления, приведенному на фиг. 3, а сигнал с фотоприемников 8 и 9 принимает вид меандра со скважностью 50%. При воздействии внешнего ускорения происходит смещение центра колебаний инерционной массы 3. Это смещение вызывает изменение скважности сигнала с фотоприемников 8 и 9, которое пропорционально действующему ускорению.
Работа с использованием закона управления с запаздыванием (фиг. 3) или с опережением (фиг. 4):
2.1. Выход в рабочий режим.
После включения питания основание 1, рамка 2 и инерционная масса 3 находятся в состоянии покоя. Ключ 25 находится в предустановленном состоянии «1». Напряжение с выхода ключа 25 начинает поступать на первый усилитель тока 26. Созданный им в первой катушке 19 электрический ток наводит в первом магнитопроводящем сердечнике 21 магнитное поле, которое, стремясь замкнуться через первый магнитопровод 23, притягивает инерционную массу 3. В результате инерционная масса 3 поворачивается на упругих подвесах 4 вместе с заслонками 5 и 6 в сторону первой катушки 19 до тех пор, пока не пройдет через точку Т1а (фиг. 4). В этот момент положение заслонок 5 и 6 вызывает изменение светового потока, проходящего по волоконно-оптическим кабелям 10, 11, 12 и 13 между излучателем 7, питающимся от источника напряжения 14, и фотоприемниками 8 и 9, в результате чего срабатывает компаратор 15, сигнал с которого переводит ключ 25 в состояние «-1», в результате чего выключается первый усилитель тока 26, сигнал с которого перестает поступать на первую катушку 19, а напряжение с выхода ключа 25 начинает поступать на второй усилитель тока 27, сигнал с которого начинает поступать на вторую катушку 20. Начинается первый полупериод (п. 2.2).
2.2. Первый полупериод
Созданный вторым усилителем тока 27 во второй катушке 20 электрический ток наводит во втором магнитопроводящем сердечнике 22 магнитное поле, которое, стремясь замкнуться через второй магнитопровод 24, притягивает инерционную массу 3 ко второй катушке 20.
Инерционная масса 3 по инерции продолжает поворачиваться на упругих подвесах 4 вместе с заслонками 5 и 6 в сторону первой катушки 19 до тех пор, пока сила упругости и сила притяжения инерционной массы 3 ко второй катушке 20 не уравновесят импульс инерционной массы 3. После этого инерционная масса 3 под действием силы упругости начинает движение ко второй катушке 20 до тех пор, пока не пройдет через точку Т2а (фиг. 4). В этот момент положение заслонок 5 и 6 вызывает изменение светового потока, проходящего по волоконно-оптическим кабелям 10, 11, 12 и 13 между излучателем 7, питающимся от источника напряжения 14, и фотоприемниками 8 и 9, в результате чего срабатывает компаратор 16, сигнал с которого переводит ключ 25 в состояние «0», в результате чего выключается второй усилитель тока 27, сигнал с которого перестает поступать на вторую катушку 20.
Инерционная масса 3 по инерции продолжает поворачиваться на упругих подвесах 4 вместе с заслонками 5 и 6 в сторону второй катушки 20 до тех пор, пока не пройдет через точку Т1б (фиг. 4). В этот момент положение заслонок 5 и 6 вызывает изменение светового потока, проходящего по волоконно-оптическим кабелям 10, 11, 12 и 13 между излучателем 7, питающимся от источника напряжения 14, и фотоприемниками 8 и 9, в результате чего срабатывает компаратор 17, сигнал с которого переводит ключ 25 в состояние «1», в результате чего включается первый усилитель тока 26, сигнал с которого начинает поступать на первую катушку 19. Начинается второй полупериод (п. 2.3).
2.3. Второй полупериод
Созданный первым усилителем тока 26 в первой катушке 19 электрический ток наводит в первом магнитопроводящем сердечнике 21 магнитное поле, которое, стремясь замкнуться через первый магнитопровод 23, притягивает инерционную массу 3 к первой катушке 19.
Инерционная масса 3 по инерции продолжает поворачиваться на упругих подвесах 4 вместе с заслонками 5 и 6 в сторону второй катушки 20 до тех пор, пока сила упругости и сила притяжения инерционной массы 3 к первой катушке 19 не уравновесят импульс инерционной массы 3. После этого инерционная масса 3 под действием силы упругости начинает движение к первой катушке 19 до тех пор, пока не пройдет через точку Т2б (фиг. 4). В этот момент положение заслонок 5 и 6 вызывает изменение светового потока, проходящего по волоконно-оптическим кабелям 10, 11, 12 и 13 между излучателем 7, питающимся от источника напряжения 14, и фотоприемниками 8 и 9, в результате чего срабатывает компаратор 18, сигнал с которого переводит ключ 25 в состояние «0», в результате чего выключается первый усилитель тока 26, сигнал с которого перестает поступать на первую катушку 19.
Инерционная масса 3 по инерции продолжает поворачиваться на упругих подвесах 4 вместе с заслонками 5 и 6 в сторону первой катушки 19 до тех пор, пока не пройдет через точку Т1а (фиг. 4). В этот момент положение заслонок 5 и 6 вызывает изменение светового потока, проходящего по волоконно-оптическим кабелям 10, 11, 12 и 13 между излучателем 7, питающимся от источника напряжения 14, и фотоприемниками 8 и 9, в результате чего срабатывает компаратор 15, сигнал с которого переводит ключ 25 в состояние «-1», в результате чего включается второй усилитель тока 27, сигнал с которого начинает поступать на вторую катушку 20. Начинается первый полупериод (п. 2.2).
Тем самым инерционная масса 3 начинает совершать автоколебания на собственной частоте согласно закону управления с запаздыванием, приведенному на фиг. 3 (либо с опережением, приведенному на фиг. 4), а сигнал с фотоприемников 8 и 9 принимает вид меандра. При воздействии внешнего ускорения происходит смещение центра колебаний инерционной массы 3. Это смещение вызывает изменение скважности сигнала с фотоприемников 8 и 9, которое пропорционально действующему ускорению.
Построение акселерометра с использованием маятниковой схемы позволяет уменьшить длину подвесов, что снижает влияние погрешности изготовления и повышает надежность, и уменьшить нежелательные эффекты, действующие на инерционную массу за счет повышения частоты второго резонанса.
Кроме того, применение оптического датчика положения позволяет снизить погрешность определения момента переключения, а применение оптического кабеля позволяет снизить стоимость изготовления как за счет использования типовых решений волоконно-оптических линий связи, так и за счет возможности размещения оптических излучателей и приемников на корпусе прибора, не прибегая к трудоемкому процессу их изготовления непосредственно на основании. Дополнительно это позволяет в случае необходимости увеличить мощность излучателя, например, для компенсации несоосности в результате погрешностей при изготовлении основания.
Применение электромагнитного силового привода позволяет повысить величину создаваемой силы, что расширяет диапазон измеряемых ускорений, а также позволяет повысить частоту автоколебаний, что расширяет полосу пропускания прибора.
Применение режима автоколебаний позволяет создать саморегулирующуюся систему, менее чувствительную к внешним помехам. Дополнительно это позволяет сократить время готовности прибора и отказаться от использования аналоговых компонентов и измерительной цепи, что повышает точность измерения, снижает нелинейность и расширяет диапазон измеряемых ускорений.
Применение законов управления, отличных от релейного, позволяет дополнительно повысить частоту автоколебаний и снизить амплитуду, что расширяет динамический диапазон прибора и снижает энергозатраты, приводя к увеличению точности.
Использование передоложенного устройства позволяет улучшить метрологические характеристики инерциальных модулей, а именно точность, диапазон измеряемых ускорений, нелинейность, а также снизить стоимость производства и размеры по сравнению с применением аналогов, обеспечивающих схожую точность измерения.
Источники информации
1. Техническое описание одномодового лазерного диода LFO-401 [Электронный ресурс] / ФТИ-Оптроник. - Электрон, текстовые дан. – СПб.: 2016. - Режим доступа: http://www.fti-optronic.com/pdfs/LFO-401.pdf, свободный.
2. Техническое описание GaAs PIN фотодиода [Электронный ресурс] / ФТИ-Оптроник. - Электрон, текстовые дан. - СПб: 2016. - Режим доступа: http://www.fti-optronic.com/pdfs/TMC-8D31-000.pdf, свободный.
3. Библиотека электронных компонентов. Выпуск 1: Оптоэлектронные приборы фирмы Kingbright. - М.: ДОДЭКА, 1999. - 64 с.
4. Библиотека электронных компонентов. Выпуск 17: Аналоговые и цифро-аналоговые микросхемы фирмы «Mitsubishi Electric». - М: ДОДЭКА, 2000. - 48 с.
5. Микросхемы для аудио- и радиоаппаратуры. - 2. - М.: Издательский дом "Додека XXI", 2001. - 288 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2014 |
|
RU2561303C1 |
| Линейный вакуумный акселерометр | 2017 |
|
RU2670178C2 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2009 |
|
RU2410703C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР С ОПТИЧЕСКОЙ СИСТЕМОЙ | 2014 |
|
RU2564810C1 |
| ЛИНЕЙНЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2509307C1 |
| УГЛОВОЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2399915C1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2410701C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СЕЙСМОПРИЁМНИК | 2002 |
|
RU2219567C1 |
| ГЕОГИДРОФОН | 2003 |
|
RU2231088C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИНТЕНСИВНОСТИ МОРСКОГО ВОЛНЕНИЯ | 2002 |
|
RU2231025C2 |
Изобретение относится к измерительной технике и может быть использовано в системах ориентации и навигации. Линейный микроакселерометр содержит основание, рамку с инерционной массой, закрепленной на упругих подвесах, датчик положения, источник напряжения, четыре компаратора, два усилителя тока, ключ, электромагнитный силовой привод, состоящий из 2N катушек, размещенных на 2N магнитопроводящих сердечниках, которые размещены с противоположных сторон рамки по N с каждой стороны, а на поверхности инерционной массы с каждой стороны расположены магнитопроводы, замыкающие магнитные потоки катушек, причем входы катушек подключены к выходу ключа, входы которого через компараторы подключены к датчику положения, который выполнен оптическим и состоит из излучателя, подключенного к источнику напряжения, и двух фотоприемников, при этом между излучателем и фотоприемниками расположены четыре оптических кабеля, а инерционная масса выполнена в виде маятника с возможностью совершения крутильных колебаний на упругих подвесах вокруг одной оси и содержит две заслонки, установленные с возможностью перекрытия светового потока между излучателем и фотоприемниками, размещенными на основании. Технический результат – повышение точности, расширение диапазона измеряемых ускорений и уменьшение нелинейности. 4 ил.
Линейный микроакселерометр, содержащий основание, рамку с инерционной массой, закрепленной на упругих подвесах, датчик положения, источник напряжения, четыре компаратора, два усилителя тока, ключ, электромагнитный силовой привод, состоящий из 2N катушек, размещенных на 2N магнитопроводящих сердечниках, которые размещены с противоположных сторон рамки по N с каждой стороны, а на поверхности инерционной массы с каждой стороны расположены магнитопроводы, замыкающие магнитные потоки катушек, причем входы катушек подключены к выходу ключа, входы которого через компараторы подключены к датчику положения, который выполнен оптическим и состоит из излучателя, подключенного к источнику напряжения, и двух фотоприемников, отличающийся тем, что между излучателем и фотоприемниками расположены четыре оптических кабеля, а инерционная масса выполнена в виде маятника с возможностью совершения крутильных колебаний на упругих подвесах вокруг одной оси и содержит две заслонки, установленные с возможностью перекрытия светового потока между излучателем и фотоприемниками, размещенными на основании.
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2014 |
|
RU2561303C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2009 |
|
RU2410703C1 |
| US 20150168441 A1, 18.06.2015 | |||
| Способ изготовления печатных схем | 1958 |
|
SU120235A1 |

