Изобретение относится к авиационной технике и предназначено для использования при реализации управления летательными аппаратами, прежде всего пассажирскими самолетами.
Система управления общесамолетным оборудованием с распределенным вычислительным ресурсом (далее по тексту - система) предназначена для выполнения задач преобразования и транспортирования к потребителям информации о параметрах систем самолетного оборудования, управления общесамолетным оборудованием и их исполнительными устройствами, защиты общесамолетного оборудования и фидера самолета от перегрузок по току, контроля состояния систем, выдачи информации для подготовки отображения их состояния, выдачи сигнальных сообщений о состоянии систем и их режимах работы, хранения информации об отказах и наработке.
Известна система управления общесамолетным оборудованием описанная в патенте №2530700 РФ МПК G06F 13/00, B64D 31/00 от 30.04.2013, включающая пульт управления со средствами управления, подключенный к системе информационного обмена, содержащей двукратно зарезервированные первый и второй каналы связи, конструктивно выполненные в виде первого основного и первого резервного, а также второго основного и второго резервного каналов информационного обмена, к которым соответственно подключены первый и второй блоки вычислители-концентраторы, первый и второй блоки защиты и коммутации линий электропитания постоянного тока, первый и второй блоки защиты и коммутации линий электропитания переменного тока, а также первый и второй блоки преобразования сигналов, каждый из которых имеет основной и резервный модули, являющиеся идентичными.
Как отмечено выше, в системе управления общесамолетным оборудованием, принятой за прототип, каждый из ее блоков имеет идентичные основной и резервный модули, чем достигается резервируемость системы, однако не обеспечивается в достаточной мере достоверность формируемой информации. Избыточность и сосредоточение информации в вычислительной части приводит к снижению надежности (безопасности) в случае возникновения нештатных ситуаций. Исходя из вышеизложенного, необходимо создание такой системы, в которой вычислительный ресурс был распределен таким образом, чтобы отказ одного или даже нескольких устройств существенно не влиял на работу системы в целом.
Задачей, на которую направлено заявляемое изобретение, является создание системы управления общесамолетным оборудованием с распределенным вычислительным ресурсом, обеспечивающей повышение безопасности пилотирования за счет автоматизации управления и контроля общесамолетного оборудования и средств управления, а также сопрягаемого фидера.
Технический результат изобретения заключается в повышении безопасности пилотирования, повышении надежности и снижении затрат на эксплуатацию самолета.
Технический результат достигается за счет того, что в системе управления общесамолетным оборудованием с распределенным вычислительным ресурсом, содержащей основной и резервный контуры, в которой основной контур состоит из первого блока вычислителя-концентратора и второго блока вычислителя-концентратора, первого блока управления процессом и второго блока управления процессом, а также n-блоков преобразования сигналов и k-блоков защиты и коммутации, взаимодействующих между собой по мультиплексному каналу информационного обмена и резервному каналу информационного обмена, а резервный контур состоит из первого блока управления процессом и второго блока управления процессом, n-блоков преобразования сигналов и k-блоков защиты и коммутации, причем каждый из блоков управления процессом взаимодействует со специализированным средством управления и содержит взаимодействующие между собой модуль приема сигналов, модуль процессора, модуль силовых команд и модуль распределения вычислительных ресурсов блока управления процессом, каждый из k-блоков защиты и коммутации содержит взаимодействующие между собой основной и контрольный каналы, где основной канал состоит из взаимодействующих между собой модуля процессора основного канала и модулей передачи силовых команд основного канала и модуля распределения вычислительных ресурсов блока защиты и коммутации, и контрольный канал состоит из взаимодействующих между собой модуля процессора контрольного канала и модулей передачи силовых команд контрольного канала, каждый из n-блоков преобразования сигналов содержит взаимодействующие между собой основной и контрольный каналы, где основной канал состоит из взаимодействующих между собой модуля приема аналоговых сигналов основного канала, модуля приема дискретных сигналов основного канала, модуля процессора и ввода/вывода основного канала, модуля распределения вычислительных ресурсов блока преобразования сигналов, контрольный канал состоит из взаимодействующих между собой модуля приема аналоговых сигналов контрольного канала, модуля приема дискретных сигналов контрольного канала, модуля процессора и ввода/вывода контрольного канала, каждый блок вычислитель-концентратор содержит взаимодействующие между собой основной и контрольный каналы, где основной канал состоит из взаимодействующих между собой модуля приема разовых команд основного канала, модуля вычислителя интегрированного основного канала, модуля передатчика разовых команд основного канала, модуля распределения вычислительных ресурсов блока вычислителя-концентратора, контрольный канал состоит из взаимодействующих между собой модуля приема разовых команд контрольного канала, модуля вычислителя интегрированного контрольного канала, модуля передатчика разовых команд контрольного канала, причем каждый модуль распределения вычислительных ресурсов содержит энергонезависимую память, устройство сравнения, устройство приема команд управления от пульта пилотов.
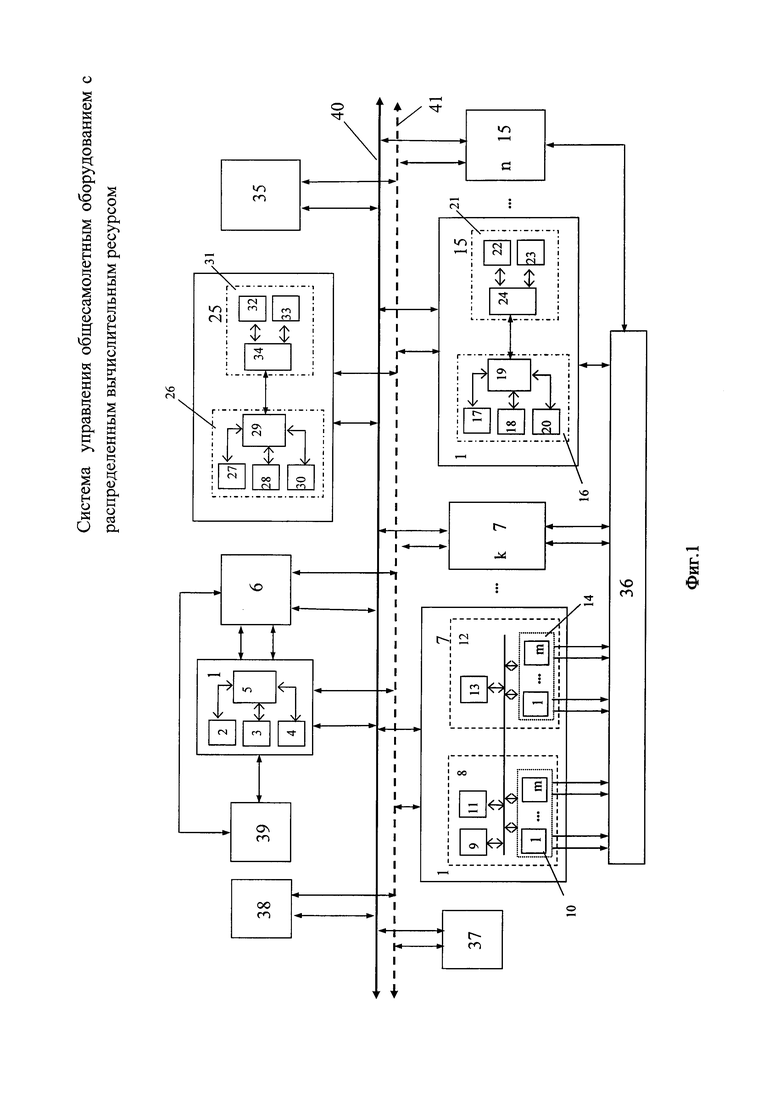
На фиг. 1 представлена блок-схема системы управления общесамолетным оборудованием с распределенным вычислительным ресурсом, где:
1 - первый блок управления процессом БУП, содержащий
2 - модуль приема сигналов,
3 - модуль силовых команд,
4 - модуль распределения вычислительных ресурсов БУП,
5 - модуль процессора,
6 - второй блок управления процессом БУП,
7 - k-блоков защиты и коммутации БЗК, каждый содержащий
8 - основной канал, включающий
9 - модуль процессора основного канала,
10 - m-модулей передачи силовых команд основного канала,
11 - модуль распределения вычислительных ресурсов БЗК,
12 - контрольный канал, включающий
13 - модуль процессора контрольного канала,
14 - m-модулей передачи силовых команд контрольного канала,
15 - n-блоков преобразования сигналов БПС, каждый содержащий
16 - основной канал, включающий
17 - модуль приема аналоговых сигналов основного канала,
18 - модуль приема дискретных сигналов основного канала,
19 - модуль процессора ввода/вывода основного канала,
20 - модуль распределения вычислительных ресурсов БПС,
21 - контрольный канал, включающий
22 - модуль приема аналоговых сигналов контрольного канала,
23 - модуль приема дискретных сигналов контрольного канала,
24 - модуль процессора ввода/вывода контрольного канала,
25 - первый блок вычислитель-концентратор БВК, содержащий
26 - основной канал, включающий
27 - модуль приема разовых команд основного канала,
28 - модуль передатчик разовых команд основного канала,
29 - модуль вычислительный интегрированный основного канала,
30 - модуль распределения вычислительных ресурсов БВК,
31 - контрольный канал, включающий
32 - модуль приема разовых команд контрольного канала,
33 - модуль передатчик разовых команд контрольного канала,
34 - модуль вычислительный интегрированный контрольного канала,
35 - второй блок вычислитель-концентратор БВК,
36 - общесамолетное оборудование,
37 - комплекс бортового радиоэлектронного оборудования БРЭО,
38 - пульт пилотов,
39 - специализированное средство управления,
40 - мультиплексный канал информационного обмена,
41 - резервный мультиплексный канал информационного обмена
На фиг. 2 показана типичная блок-схема модуля распределения вычислительных ресурсов, где
42 - энергонезависимая память,
43 - устройство сравнения,
44 - устройство приема команд управления от пульта пилотов.
Первый БУП 1 и второй БУП 6 являются моноблочными изделиями и предназначены для взаимодействия со специализированными средствами управления, интеграция которых нецелесообразна вследствие обеспечения функциональной безопасности сопрягаемых систем, к таким системам относятся, например, система управления торможением, система обогрева стекол и т.д.
Каждый блок БУП 1, 6 имеет модульный принцип построения и содержит функционально законченные, съемные, взаимозаменяемые – модуль приема сигналов 2, модуль силовых команд 3, модуль процессора 4, модуль распределения вычислительных ресурсов БУП 5, осуществляющие информационный обмен между собой, формирование и выдачу информации в сопрягаемые системы о результатах контроля и самоконтроля.
N-блоков защиты и коммутации БЗК 7 являются моноблочными изделиями и предназначены для формирования команд управления исполнительным механизмам общесамолетного оборудования с защитой цепей от перегрузок по току и короткого замыкания. Блок объединяет функцию коммутатора силовых сигналов и функцию автомата защиты цепей.
Каждый блок БЗК имеет два функционально завершенных независимых канала - основной канал 8 и контрольный канал 12, расположенных в одном корпусе. Каждый канал имеет модульный принцип построения и содержит функционально законченные, съемные, взаимозаменяемые модули. Основной канал 8 содержит модуль процессора основного канала 9, m-модулей передачи силовых команд основного канала 10 и модуль распределения вычислительных ресурсов БЗК 11. Контрольный канал 12 содержит модуль процессора контрольного канала 13 и m-модулей передачи силовых команд контрольного канала 14.
N-блоков преобразования сигналов БПС 15 являются моноблочными изделиями и предназначены для сбора, обработки и выдачи информации в сопрягаемое оборудование.
Каждый блок БПС имеет два функционально завершенных независимых канала - основной канал 16 и контрольный канал 21, расположенных в одном корпусе. Каждый канал имеет модульный принцип построения и содержит функционально законченные, съемные, взаимозаменяемые модули. Основной канал 16 содержит модуль приема аналоговых сигналов основного канала 17, модуль приема дискретных сигналов основного канала 18, модуль процессора ввода/вывода основного канала 19 и модуль распределения вычислительных ресурсов БПС 20. Контрольный канал 21 содержит модуль приема аналоговых сигналов контрольного канала 22, модуль приема дискретных сигналов контрольного канала 23 и модуль процессора ввода/вывода контрольного канала 24.
Первый БВК 25 и второй БВК 35 являются моноблочными изделиями и предназначены для приема сигналов в виде разовых команд, аналоговых сигналов и стандартного последовательного кода, обработки информации по программе, выдачу сигналов в виде сигналов управления и последовательного кода; хранения и функционирования специального программного обеспечения в составе блока; проведение контроля собственной работоспособности в наземных условиях и в полете с выдачей информации о техническом состоянии в сопрягаемое оборудование.
Каждый блок БВК 25 и БВК 35 имеет два функционально завершенных независимых канала - основной канал 26 и контрольный канал 31, расположенных в одном корпусе. Каждый канал имеет модульный принцип построения и содержит функционально законченные, съемные, взаимозаменяемые модули. Основной канал 26 содержит модуль приема разовых команд основного канала 27, модуль передатчик разовых команд основного канала 28, модуль вычислительный интегрированный основного канала 29 и модуль распределения вычислительных ресурсов БВК 30. Контрольный канал 31 содержит модуль приема разовых команд контрольного канала 32, модуль передатчик разовых команд контрольного канала 33, и модуль вычислительный интегрированный контрольного канала 34.
Общесамолетное оборудование 36 содержит систему электроснабжения, систему внешнего светотехнического оборудования, систему запуска, управления и контроля силовой установкой, систему запуска, управления и контроля вспомогательной силовой установки, топливную систему, систему управления и измерения топлива, систему кондиционирования воздуха, гидропневмосистему, систему пожарной защиты, кислородную систему, систему шасси, систему внутрикабинной сигнализации, датчики и сигнализаторы и т.д.
БРЭО 37 включает в свой состав комплексную систему электронной индикации и сигнализации КСЭИС, систему измерения воздушных данных СИВД, многоканальную систему регистрации полетной информации МСРП, бортовую систему контроля двигателя БСКД, бортовую систему технического обслуживания БСТО и т.д.
Пульт пилотов 38 представляет собой многофункциональный пульт с расположенными на нем органами управления общесамолетным оборудованием.
Специализированное средство управления 39 представляет собой систему или набор специальных блоков, работоспособность которых существенно влияет на безопасность пилотирования (например, система управления торможением, система обогрева стекол и т.д.).
Мультиплексный канал информационного обмена 40 является каналом, объединяющим блоки системы.
Резервный мультиплексный канал информационного обмена 41 является каналом, объединяющим блоки системы.
Каждый из модулей - модуль распределения вычислительных ресурсов БУП 5, модуль распределения вычислительных ресурсов БЗК 11, модуль распределения вычислительных ресурсов БПС 20, модуль распределения вычислительных ресурсов БКС 30 снабжен энергонезависимой памятью 42, устройством сравнения 43, устройством приема команд управления от пульта пилотов 44, взаимодействующих между собой.
Введенные модули распределения вычислительных ресурсов 5, 11, 20, 30 обеспечивают возможность прогнозирования состояния компонентов системы и сопрягаемого общесамолетного оборудования путем обработки накопленных данных в соответствии с алгоритмом прогнозирования, что повышает безопасность эксплуатации самолета, а также функционирование системы при условии отказа центральных вычислителей.
Система управления общесамолетным оборудованием с распределенным вычислительным ресурсом работает следующим образом.
Система имеет два контура управления - основной и резервный контур.
Основной контур состоит из первого блока БВК 25 и второго блока БВК 35, первого блока БУП 1 и второго блока БУП 6, а также n-блоков БПС 15 и k-блоков БЗК 7, взаимодействующих между собой и с общесамолетным оборудованием 36, БРЭО 37, пультом пилотов 38, по мультиплексному каналу информационного обмена 40 и резервному каналу информационного обмена 41.
Входящие в каждый БПС 15 основной канал 16 и контрольный канал 21 через модуль приема аналоговых сигналов основного канала 17, модуль приема аналоговых сигналов контрольного канала 22, модуль приема дискретных сигналов основного канала 18, модуль приема дискретных сигналов контрольного канала 23 осуществляют прием параметрической информации по мультиплексному каналу информационного обмена 40 и резервному мультиплексному каналу информационного обмена 41 от систем БРЭО 37 и общесамолетного оборудования 36. Модуль приема аналоговых сигналов основного канала 17 и модуль приема дискретных сигналов основного канала 18 взаимодействуют с модулем процессора и ввода/вывода основного канала 19. Модуль приема аналоговых сигналов контрольного канала 22 и модуль приема дискретных сигналов контрольного канала 23 взаимодействуют с модулем процессора и ввода/вывода контрольного канала 24. Модуль процессора и ввода/вывода основного канала 19 и модуль процессора и ввода/вывода контрольного канала 24 осуществляют обработку информации, а устройство сравнения 43, входящее в модуль распределения вычислительных ресурсов БПС 20 осуществляет мажоритарную обработку и сравнение информации от основного канала 15 и контрольного канала 21 для достоверного формирования информации и передачу ее по мультиплексному каналу информационного обмена 40 и резервному каналу информационного обмена 41 в сопрягаемое оборудование.
Модули приема сигналов 2 как первого БУП 1, так и второго БУП 7 осуществляют прием параметрической информации от специализированного средства управления 39. Далее обработанная информация поступает в модуль процессора 5, где производится логическая обработка по алгоритмам управления и контроля и формируются команды управления и передаются для исполнения в модуль силовых команд 3. Устройство сравнения 43, входящее в модуль распределения вычислительных ресурсов БУП 4, осуществляет мажоритарную обработку и сравнение информации от первого БУП 1 и второго БУП 7 для достоверного формирования информации и передачу ее по мультиплексному каналу информационного обмена 40 и резервному каналу информационного обмена 41 в сопрягаемое оборудование.
Модуль приема разовых команд основного канала 27 и модуль приема разовых команд контрольного канала 31, входящие соответственно в основной канал 26 и контрольный канал 31 первого БВК 25, осуществляют преобразование данной информации в необходимый для дальнейшей обработки вид. Обработанная информация поступает в модуль вычислительный интегрированный основного канала 29 и в модуль вычислительный интегрированный контрольного канала 31 соответственно, где осуществляется реализация заданных алгоритмов вычисления и управления другими модулями устройства. Далее модуль передатчик разовых команд основного канала 29, модуль передатчик разовых команд контрольного канала 33 производят формирование силовых сигналов управления по информации, получаемой от модуля вычислительного интегрированного основного канала 29 и в модуля вычислительного интегрированного контрольного канала 31. Устройство сравнения 43, входящее в модуль распределения вычислительных ресурсов БВК 30, осуществляет мажоритарную обработку, и сравнение информации от основного канала 26 и контрольного канала 31 для достоверного формирования информации.
Каждый блок из k-блоков БЗК 7 содержит основной канал 8 и контрольный канал 12. Основной канал 8 состоит из функционально независимых модуля процессора основного канала 9, m-модулей передачи силовых команд основного канала 10 исполнительным устройствам общесамолетного оборудования 36, модуль распределения вычислительных ресурсов БЗК 11. Контрольный канал 12 состоит из функционально независимых модуля процессора контрольного канала 13, m-модулей передачи силовых команд контрольного канала 14 исполнительным устройствам общесамолетного оборудования 36.
В соответствии с запросами, выдаваемыми модулями вычислительными интегрированными основного канала 29 и контрольного канала 34 первого и второго БВК 25, 35, модуль процессора основного канала 9 и контрольного канала 13 БЗК 7 через m-модулей передачи силовых команд основного канала 10 и m-модулей передачи силовых команд контрольного канала 12 выдает силовые команды управления в общесамолетное оборудование 36, осуществляя коммутацию входа питания блоков систем общесамолетного оборудования на требуемый выход канала 8 или 12. Устройство сравнения 43, входящее в модуль распределения вычислительных ресурсов БЗК 11, осуществляет мажоритарную обработку и сравнение информации от основного канала 8 и контрольного канала 12 для достоверного формирования информации.
В соответствии с запросами состояния встроенного контроля БЗК выдает в мультиплексный канал информационного обмена 40 и резервный мультиплексный канал информационного обмена 41 следующую информацию: значение эхо-сигнала каждой команды управления, значение тока в коммутируемой цепи, значение общего тока канала блока (суммарный ток всех команд управления, измеряемый на входе блока), напряжение на входе блока, признаки наличия отказов и отключения выходных цепей в результате нештатных ситуаций, связанных с отказами исполнительных механизмов или сопрягаемого фидера.
Введение в каждый блок системы модуля распределения вычислительных ресурсов 4, 11, 20, 30 позволяет прогнозировать состояние блоков системы и сопрягаемого самолетного оборудования. Это достигается тем, что модуль распределения вычислительных ресурсов БУП 4, модуль распределения вычислительных ресурсов БЗК 11, модуль распределения вычислительных ресурсов БПС 20, модуль распределения вычислительных ресурсов БВК 30 содержат энергонезависимую память 42, устройство сравнения 43 и устройство приема команд управления от пульта пилотов 44.
Энергонезависимая память 42 по специальному алгоритму прогнозирования обрабатывает накопленную информацию об отказах и наработке блоков системы и общесамолетного оборудования, что позволяет формировать прогноз о техническом состоянии сопрягаемых компонентов самолетных систем и техническом состоянии блоков системы.
Устройство приема команд управления от пульта пилотов 44 обеспечивает автономную работу системы в случае отказа основного или резервного контура, принимая команды управления непосредственно от пульта пилотов 38.
Устройство сравнения 43 в основном канале k-блоков БЗК 7, n-блоков БПС 15, первом БВК 25, втором БВК 35 в результате сравнения расчетов и показаний в основном и контрольном канале, в случае их несовпадения, определить с высокой степенью достоверности отказавший канал и перейти к использованию работоспособного канала, а в случае отказа и этого канала перейти с помощью устройства приема команд управления от пульта пилотов 44 к ручному управлению и перераспределению вычислительных ресурсов системы по исправленным блокам.
Например, работа при отказе, первого и второго блоков вычислителей-концентраторов осуществляется резервным контуром следующим образом.
В соответствии с запросами, выдаваемыми модулями процессора и ввода/вывода основного канала 19 и контрольного канала 24 n-блоков БПС 15, модуль процессора основного канала 9 и контрольного канала 13 БЗК 7 через m-модулей передачи силовых команд основного канала 10 и m-модулей передачи силовых команд контрольного канала 12 выдает силовые команды управления в общесамолетное оборудование 36, осуществляя коммутацию входа питания блоков систем общесамолетного оборудования на требуемый выход канала 8 или 12. Устройство сравнения 43, входящее в модуль распределения вычислительных ресурсов БЗК 11, осуществляет мажоритарную обработку и сравнение информации от основного канала 8 и контрольного канала 12 для достоверного формирования информации.
Как видно из вышеизложенного, модули распределения вычислительных ресурсов 4, 11, 20, 30 позволяют осуществлять реконфигурацию блоков системы при условии отказа центральных вычислителей.
Блоки системы разработаны на основе использования мультипроцессорных средств, обеспечивающих высокую производительность и функциональное деление решаемых задач - цифровая обработка сигналов, выполнение алгоритмов контроля параметрической информации, выполнение алгоритмов реконфигурации системы управления с целью минимизации последствий отказа, формирование команд управления, оценка собственной работоспособности без применения наземной контрольно-проверочной аппаратуры.
Таким образом, в заявляемой системе управления общесамолетным оборудованием с распределенным вычислительным ресурсом реализовано четырехкратное резервирование управления общесамолетным оборудованием. Это обеспечивает высокую надежность и безопасность пилотирования, а также ведет к снижению затрат на эксплуатацию самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| ПАССАЖИРСКИЙ САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ И САМОЛЕТНЫМИ СИСТЕМАМИ | 2013 |
|
RU2529248C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263045C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2013 |
|
RU2530700C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| Система дистанционного управления вертолетом | 2015 |
|
RU2636245C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |

Система управления общесамолётным оборудованием с распределенным вычислительным ресурсом содержит два блока управления процессом (БУП), k-блоков защиты и коммутации (БЗК), n-блоков преобразования сигналов (БПС), два блока вычислителя-концентратора (БВК), пульт пилотов, специализированное средство управления, соединенные определенным образом при помощи основного и резервного мультиплексного каналов с общесамолетным оборудованием, бортовым радиоэлектронным оборудованием, пультом пилотов, специализированным средством управления. БУП содержит модуль приема сигналов, модуль силовых команд, модуль процессора. БЗК состоит из основного и резервного каналов, каждый из которых содержит модуль процессора, m-модулей передачи силовых команд, БВК состоит из основного и контрольного канала, каждый из которых содержит модуль приема разовых команд, модуль передатчик разовых команд, модуль вычислительный интегрированный. Каждый из БУП и основных каналы БЗК, БПС, БВК дополнительно содержат модуль распределения вычислительных ресурсов. Модуль распределения вычислительных ресурсов содержит энергонезависимую память, устройство сравнения, устройство приема команд от пульта пилотов. Обеспечивается повышение безопасности пилотирования за счет автоматизации управления и контроля общесамолётного оборудования. 2 ил.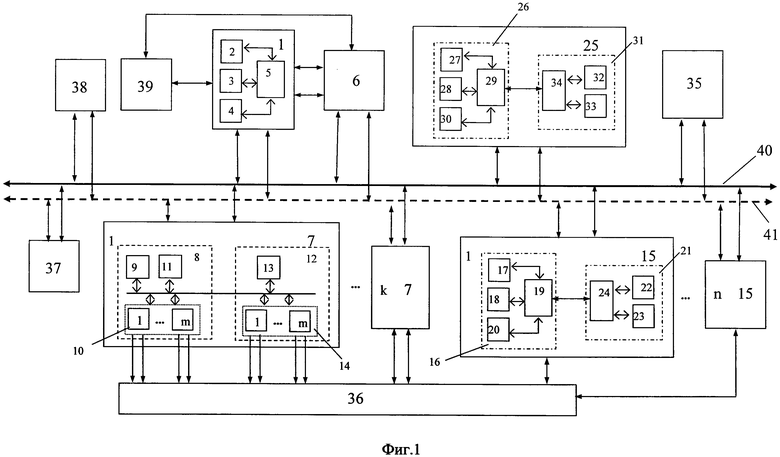
Система управления общесамолетным оборудованием с распределенным вычислительным ресурсом, содержащая взаимодействующие по мультиплексному каналу информационного взаимодействия и резервному каналу информационного взаимодействия с общесамолетным оборудованием, комплексом бортового радиоэлектронного оборудования, пультом пилотов первый блок вычислитель-концентратор, второй блок вычислитель-концентратор, блок преобразования сигналов, блок защиты и коммутации, каждый из которых содержит основной канал, отличающаяся тем, что система содержит первый и второй блоки управления процессом, n-блоков преобразования сигналов, k-блоков защиты и коммутации, образующие основной и резервный контуры, основной контур состоит из первого блока вычислителя-концентратора и второго блока вычислителя-концентратора, первого блока управления процессом и второго блока управления процессом, а также n-блоков преобразования сигналов и k-блоков защиты и коммутации, взаимодействующих между собой по мультиплексному каналу информационного обмена и резервному каналу информационного обмена, а резервный контур состоит из первого блока управления процессом и второго блока управления процессом, n-блоков преобразования сигналов и k-блоков защиты и коммутации, причем каждый из блоков управления процессом взаимодействует со специализированным средством управления и содержит взаимодействующие между собой модуль приема сигналов, модуль процессора, модуль силовых команд и модуль распределения вычислительных ресурсов блока управления процессом, каждый из k-блоков защиты и коммутации содержит взаимодействующие между собой основной и контрольный каналы, где основной канал состоит из взаимодействующих между собой модуля процессора основного канала и модулей передачи силовых команд основного канала и модуля распределения вычислительных ресурсов блока защиты и коммутации, а контрольный канал состоит из взаимодействующих между собой модуля процессора контрольного канала и модулей передачи силовых команд контрольного канала, каждый из n-блоков преобразования сигналов содержит взаимодействующие между собой основной и контрольный каналы, где основной канал состоит из взаимодействующих между собой модуля приема аналоговых сигналов основного канала, модуля приема дискретных сигналов основного канала, модуля процессора и ввода/вывода основного канала, модуля распределения вычислительных ресурсов блока преобразования сигналов, контрольный канал состоит из взаимодействующих между собой модуля приема аналоговых сигналов контрольного канала, модуля приема дискретных сигналов контрольного канала, модуля процессора и ввода/вывода контрольного канала, каждый блок вычислитель-концентратор содержит взаимодействующие между собой основной и контрольный каналы, где основной канал состоит из взаимодействующих между собой модуля приема разовых команд основного канала, модуля вычислителя интегрированного основного канала, модуля передатчика разовых команд основного канала, модуля распределения вычислительных ресурсов блока вычислителя-концентратора, контрольный канал состоит из взаимодействующих между собой модуля приема разовых команд контрольного канала, модуля вычислителя интегрированного контрольного канала, модуля передатчика разовых команд контрольного канала, причем каждый модуль распределения вычислительных ресурсов содержит энергонезависимую память, устройство сравнения, устройство приема команд управления от пульта пилотов.
| УНИВЕРСАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263045C1 |
| ПАССАЖИРСКИЙ САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ И САМОЛЕТНЫМИ СИСТЕМАМИ | 2013 |
|
RU2529248C1 |
| Способ забора крови из полостей сердца и крупных сосудов | 1960 |
|
SU136011A1 |
| US 9168995 B2, 27.10.2015 | |||
| US 8818575 B2, 26.08.2014. | |||

