Предлагаемое изобретение относится к системам наведения и обнаружения цели и может быть использовано в составе учебного переносного зенитного ракетного комплекса (ПЗРК).
Известен прицел тепловизионный (см. патент на полезную модель №125732, М.кл. G02B 23/00, опубл. 10.03.2013 г.), содержащий инфракрасный объектив и последовательно связанные фотоприемное устройство, блок обработки информации и видеопросмотровое устройство с экраном и прицельной маркой, а также блок памяти и окуляр, при этом объектив содержит компенсатор расфокусировки изображения, который расположен перед фотоприемным устройством, а фотоприемное устройство установлено в фокальной плоскости объектива и выполнено в виде матрицы неохлаждаемых болометрических чувствительных элементов, блок памяти подключен к входу блока обработки информации и содержит значения коэффициентов коррекции, соответствующих определенным значениям температуры чувствительных элементов матрицы, а блок обработки информации выполнен с возможностью непрерывного измерения температуры чувствительных элементов матрицы и вычисления значений коэффициентов коррекции для текущих значений температуры каждого чувствительного элемента матрицы на основе заданных и содержащихся в блоке памяти значений коэффициентов коррекции, соответствующих определенным значениям температуры чувствительных элементов матрицы.
Данный прицел имеет прицельную марку, однако в данном устройстве ее невозможно использовать для тренировки стрелка-зенитчика по удержанию воздушной цели в заданном телесном угле, соответствующем телесному углу захвата головки самонаведения ракеты ПЗРК.
В реальной ситуации стрелок-зенитчик прицеливается через открытый зенитный прицел, расположенный на ПЗРК, но наличие в данном прицеле окуляра делает учебную ситуацию нереальной.
Кроме того, данный прицел не может быть выполнен в размерах конструктивных элементов существующих ПЗРК.
При этом данный прицел может работать только в инфракрасном диапазоне длин волн.
Известен модуль захвата и сопровождения воздушной цели (см. патент на полезную модель №135404, М.кл. F41G 1/54, опубл. 10.12.2013 г.), содержащий инфракрасный объектив, установленный перед микроболометрическим приемником с матрицей неохлаждаемых чувствительных элементов, последовательно соединенным с блоком цифровой обработки, который выполнен с возможностью автоматического выделения цели в любых условиях фоновой обстановки путем сравнения с автоматически формируемым порогом контрастности и задаваемой площадью цели и формирования электрического сигнала захвата при попадании цели в область захвата, соответствующую требуемому значению телесного угла удержания цели, а корпус модуля выполнен в размерах корпуса «холодильника» ПЗРК и представляет собой конструкторскую сборку цилиндра и полусферы, соединенных между собой винтовыми соединениями, при этом в цилиндрической части, имеющей с внешней стороны зафиксированную крышку, последовательно установлены и закреплены с помощью опоры и крепежных винтов инфракрасный объектив и микроболометрический приемник с матрицей неохлаждаемых чувствительных элементов, а к внешней широкой стороне полусферы с ее внутренней стороны через обойму прикреплены две платы блока цифровой обработки, связанные между собой крепежными винтами через патрубки.
При этом блок цифровой обработки для реализации указанных выше возможностей содержит АЦП, один из входов которого является входом для подключения выхода микроболометрического приемника, к которому подключены вход выделителя синхроимпульсов, соответствующий вход усилителя-смесителя и соответствующий вход компаратора, второй и третий входы АЦП служат для соединения с соответствующими выходами выделителя синхроимпульсов и соответствующими входами компаратора, а четвертый вход АЦП соединен с выходом компаратора, соответствующими входами связанного с выходами АЦП и ЦАП, соответствующие выходы компаратора соединены с соответствующим входом усилителя-смесителя и входом индикатора в виде светодиода, входной/выходной шиной АЦП и ЦАП связаны между собой, а выход усилителя-смесителя является выходом блока цифровой обработки, который также содержит стабилизатор напряжения.
Данный модуль захвата и сопровождения воздушной цели обеспечивает возможность прицеливания через открытый зенитный прицел для приближения к реальной обстановке и выполнен в размерах, позволяющих разместить его в корпусе «холодильника» ПЗРК.
Однако данный модуль не обеспечивает возможности распознавания помехи по форме и количеству объектов, находящихся в зоне захвата, а также содержит только тепловизионный модуль, включающий инфракрасный объектив и микроболометрический приемник с матрицей неохлаждаемых чувствительных элементов, что ограничивает диапазон условий его использования.
Техническим результатом изобретения является обеспечение возможности захвата цели и дополнительного распознавания помехи по форме и количеству объектов в зоне захвата, а также расширения диапазона условий использования МЗЦ путем применения как тепловизионного, так и телевизионного модуля.
Достижение указанного технического результата обеспечивается в предлагаемом модуле захвата цели, содержащем объектив, установленный перед приемником, соединенным с двумя платами блока цифровой обработки (БЦО), связанными между собой посредством крепежных винтов, при этом модуль выполнен в размерах корпуса «холодильника» переносного зенитно-ракетного комплекса (ПЗРК) и представляет собой конструкторскую сборку цилиндра и полусферы, соединенных между собой с помощью винтовых соединений, причем в цилиндрической части, имеющей с внешней стороны зафиксированную крышку, последовательно установлены и зафиксированы с помощью элементов крепления упомянутые объектив и приемник, а в сферической части к внешней широкой стенке полусферы с ее внутренней стороны прикреплены две упомянутые платы БЦО, при этом БЦО выполнен с возможностью автоматического выделения цели в условиях фоновой обстановки путем сравнения с автоматически формируемым порогом контрастности и задаваемой площадью цели и формирования электрического сигнала захвата при попадании цели в область захвата, соответствующую требуемому значению телесного угла удержания цели, отличающемся тем, что конструкторская сборка цилиндра и полусферы выполнена с возможностью разъединения цилиндра и полусферы для установки различных типов объектива и приемника, при этом объектив зафиксирован в цилиндрической части модуля с помощью уплотнительного кольца, создающего совместно с установленным перед объективом защитным стеклом герметичный объем корпуса со стороны объектива, а приемник - с помощью стопоров держателей, а БЦО выполнен с дополнительной возможностью выделения цели на фоне помех по форме и количеству объектов в зоне захвата и возможностью обработки сигналов как от микроболометрического, так и от телевизионного приемников.
При этом модуль захвата цели может содержать сменный тепловизионный (ТПВ) модуль канала обнаружения цели, в котором объектив представляет собой инфракрасный объектив, а приемник выполнен в виде болометрического приемника.
Также предлагаемый модуль захвата цели может содержать сменный телевизионный (ТВ) модуль канала обнаружения цели, который включает телевизионный объектив и телевизионный приемник.
БЦО предлагаемого модуля содержит два входных фильтра ТПВ-канала и ТВ-канала обнаружения цели соответственно, два буферных каскада, микроконтроллер, имеющий в своем составе центральное процессорное устройство (ЦПУ), модули аналогово-цифрового преобразования (АЦП), цифро-аналогового преобразования (ЦАП), и компаратор, а также блок выделения синхроимпульсов (СИ), смеситель, третий буферный каскад, при этом входом БЦО является вход соответствующего входного фильтра, выходом связанного через переключатель и буферные каскады со входом АЦП микроконтроллера и соответствующим входом компаратора микроконтроллера, другой вход компаратора соединен с выходом ЦАП микроконтроллера, входы порта ввода-вывода микроконтроллера соединены с выходами переключателя и блока выделения синхроимпульсов (СИ) соответственно, первый выход порта ввода-вывода микроконтроллера соединен с соответствующим входом смесителя, другой вход которого соединен с входом соответствующего фильтра, а выход смесителя - с входом третьего буферного каскада, связанного выходом с технологическим разъемом, предназначенным для управления параметрами МЗЦ и получения изображения для контроля его работы, второй выход порта ввода-вывода микроконтроллера является выходом сигнала захвата цели, причем порт ввода-вывода микроконтроллера связан внутренней шиной данных микроконтроллера с центральным процессорным устройством и с интерфейсом программирования. Выход интерфейса программирования подключен к технологическому разъему, служащему для управления параметрами МЗЦ и контроля его работы через общую шину МЗЦ.
Кроме того, модуль захвата цели снабжен блоком питания для генерации и стабилизации напряжений 3,3В, 5,5В и 12В, установленным на одной из плат БЦО.
Предлагаемый модуль захвата цели может содержать осушительный патрон с силикагелем, закрепленный на сферической части корпуса через технологические отверстия.
Благодаря тому, что корпус МЗЦ в виде конструкторской сборки цилиндра и полусферы выполнен с возможностью их разъединения для установки сменных ТПВ или ТВ модуля (с различными объективами и приемниками), это позволяет расширить диапазон условий использования МЗЦ путем применения как тепловизионного, так и телевизионного каналов обнаружения.
При этом предлагаемое исполнение БЦО позволяет обнаружить цель и распознать помеху по форме (например, классифицировать обнаруженные провода, трубы, другие длинные и узкие предметы, несмотря на то, что они соответствуют заданной контрастности и площади цели, как помеха) и количеству объектов, находящихся в зоне захвата (помеха будет распознана, если в зоне захвата будет обнаружено более одного объекта).
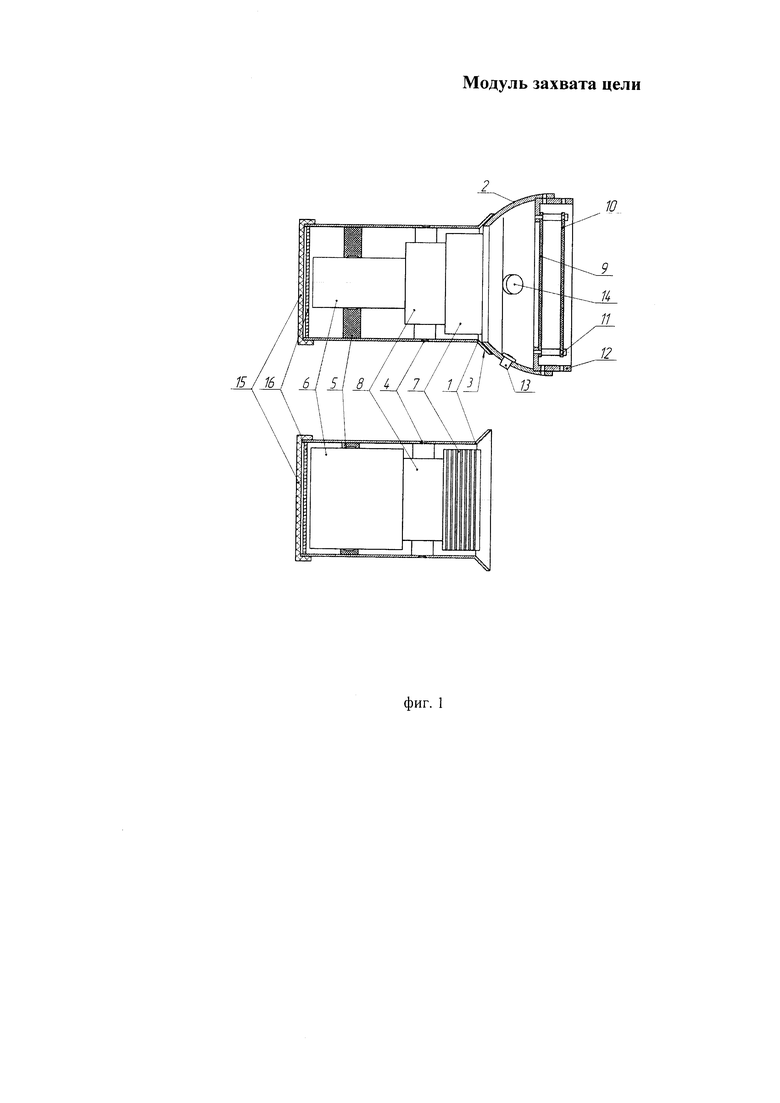
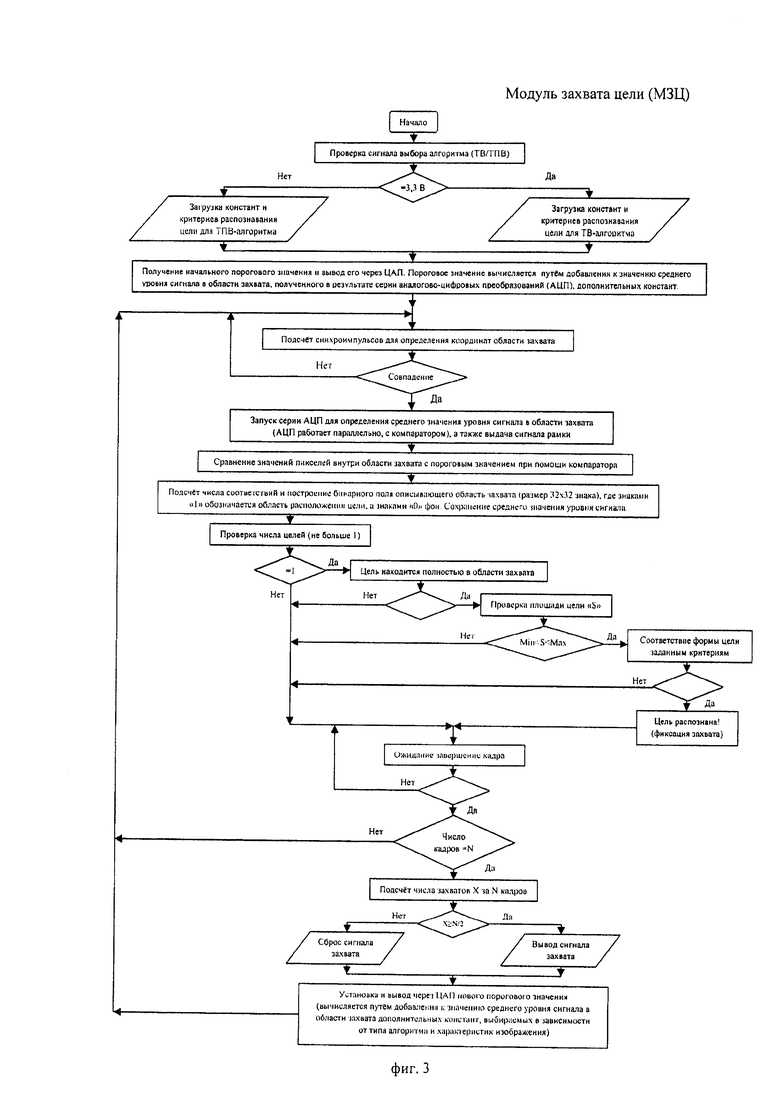
Предлагаемое изобретение поясняется чертежами, где на фиг. 1 приведена конструкция предлагаемого модуля захвата цели (виды - в разрезе вертикальной плоскостью), на фиг. 2 - структурная схема модуля захвата цели, на фиг. 3 - блок-схема алгоритма работы БЦО.
Согласно фиг. 1 МЗЦ содержит съемный ТВ-модуль или ТПВ -модуль с объективом и приемником, размещенным в одном из конструктивных элементов ПЗРК, так называемом «холодильнике», а точнее, в его цилиндрической части 1. Цилиндрическая часть 1 крепится к сферической части (полусфере) 2 «холодильника» посредством крепежных винтов 3 и имеет возможность разъединения с ней, что позволяет в полигонных условиях произвести замену ТВ-модуля МЗЦ на ТПВ-модуль и наоборот.
В цилиндрической части 1 размещены и закреплены с помощью стопоров-держателей 4 и уплотнительных колец 5 ТВ или ТПВ-модули, также представляющие собой сборки, состоящие из объектива 6 ТПВ или ТВ-модуля и приемника 7 ТПВ или ТВ-модуля, соединенные между собой с помощью переходного кольца 8.
Полусфера 2 не изменяется при замене ТПВ-модуля на ТВ-модуль и обратно. К внешней широкой части полусферы 2 с внутренней стороны прикреплены две платы 9 и 10 цифровой обработки, которые крепятся между собой крепежными винтами 11 через эбонитовые втулки, а к полусфере - при помощи крепежного кольца 12. На внешней стороне полусферы 2 зафиксированы с помощью крепежных винтов и резьбовых соединений технологический разъем 13 и осушительный патрон 14. Технологический разъем 13 позволяет производить, при необходимости, подключение электронных устройств для управления параметрами МЗЦ и контроля получаемого изображения. Осушительный патрон 14, снабженный силикагелем, позволяет поддерживать в норме уровень влажности внутри корпуса МЗЦ.
На фиг. 1 также показаны зафиксированные с внешней стороны цилиндрической части корпуса крышка 15 и за ней, перед объективом 6 - защитное стекло 16, которые обеспечивают защиту объектива 6 от внешних механических и тепловых воздействий как при транспортировке, так при работе МЗЦ.
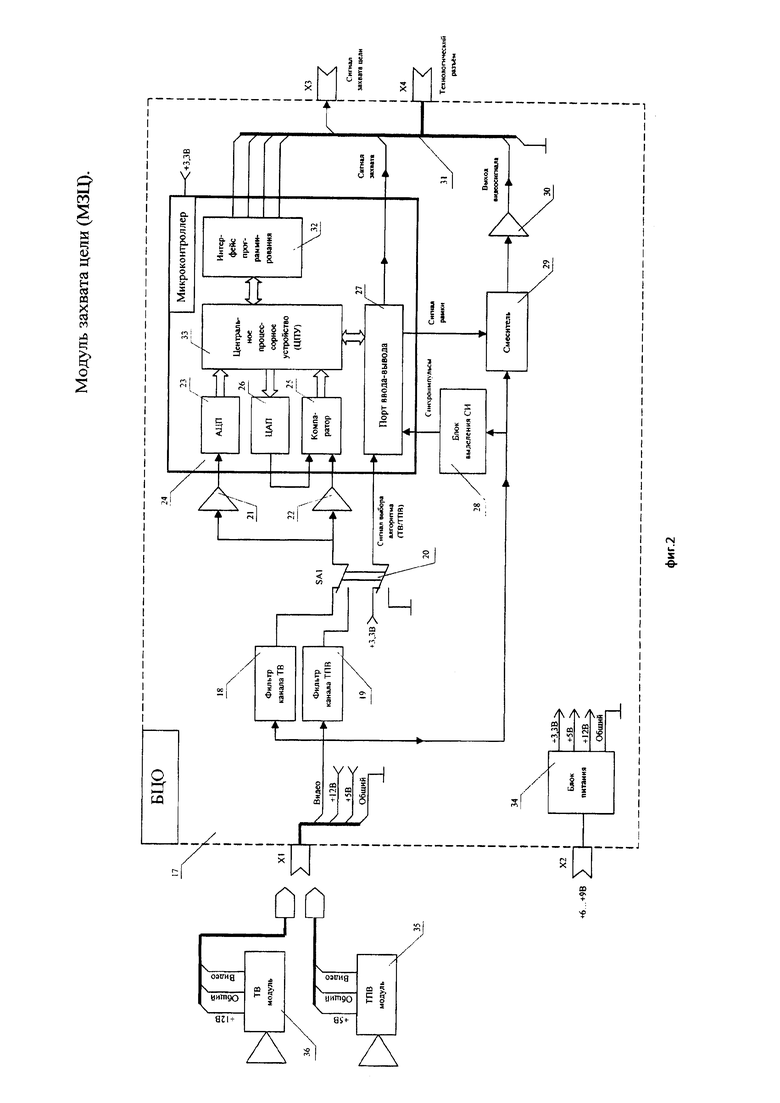
Согласно фиг. 2 МЗЦ содержит блок 17 цифровой обработки (БЦО), имеющий вход X1, подключенный к входам фильтров 18 канала ТВ или 19 канала ТПВ соответственно, входящим в блок 17 цифровой обработки, выходы фильтров 18 или 19 через первый выход переключателя 20 подключаются к входам первого и второго буферных каскадов 21 и 22 соответственно, выход первого буферного каскада 21 подключается ко входу модуля 23 аналогово-цифрового преобразования (АЦП), входящего в состав микроконтроллера 24, а выход второго буферного каскада 22 подключается к первому входу компаратора 25, ко второму входу которого подключен выход модуля 26 цифро-аналогового преобразования (ЦАП), компаратор 25 и ЦАП 26 также входят в микроконтроллер 24. К первому входу порта 27 ввода-вывода подключен второй выход переключателя 20, а ко второму входу порта 27 ввода-вывода подключен выход блока 28 выделения синхроимпульсов (СИ), вход которого, как и вход смесителя 29, соединен с входами фильтра 18 канала ТВ и фильтра 19 канала ТПВ, второй вход смесителя 29 соединен с первым выходом порта 27 ввода-вывода, а выход смесителя 29 подключен к входу третьего буферного каскада 30, выход которого подключен к общей шине 31, к которой также подключен интерфейс 32 программирования, общая шина 31 подключена к технологическому разъему Х4, который может быть использован для загрузки программного обеспечения микроконтроллера 24, управления параметрами и контроля работы МЗЦ. Второй выход порта 27 ввода-вывода подключен через общую шину 31 к разъему Х3, на котором формируется сигнал захвата цели.
Модули АЦП 23, ЦАП 26 и компаратор 25, порт 27 ввода-вывода и интерфейс 32 программирования, микроконтроллера 24 соединены с его центральным процессорным устройством (ЦПУ) 33, осуществляющим управление и обработку данных для реализации алгоритма работы МЗЦ.
Блок 34 питания подключен с помощью разъема Х2 к внешнему питающему напряжению значением 6…9В, преобразующим его в стабилизированные напряжения 3,3В, 5В и 12В, необходимые для работы МЗЦ, соответственно подающиеся на микроконтроллер 24 и разъем Х1, предназначенный для подключения съемных ТПВ модуля 35 и ТВ модуля 36, также входящих в состав МЗЦ.
Работа предлагаемого МЗЦ осуществляется следующим образом (см. фиг. 2).
Видеосигнал с ТВ-модуля 36 или ТПВ-модуля 35 поступает в БЦО 17 через разъем X1 на вход фильтра 18 канала ТВ или фильтра 19 канала ТПВ, представляющие собой фильтры низкой частоты, ограничивающие полосу пропускаемых частот, что уменьшает влияние помех. Далее с выхода фильтра 18 или 19 через первый выход переключателя 20 видеосигнал подается на входы буферных каскадов 21 и 22, служащих для согласования выходов ТВ и ТПВ-модулей 36, 35 со входом АЦП 23 и входом компаратора 25 микроконтроллера 24.
Далее видеосигнал с выхода первого буферного каскада 21 поступает на вход модуля АЦП 23, производящего оцифровку видеосигнала внутри области захвата, а с выхода буферного каскада 22 - на первый вход компаратора 25.
Компаратор 25 производит сравнение значения уровня видеосигнала, соответствующего каждому пикселю приемной матрицы, находящемуся внутри области захвата, с пороговым значением, вычисляемым ЦПУ 33 и выводимым через ЦАП 26 на второй вход компаратора 25.
ЦПУ 33, используя данные компаратора 25, производит подсчет числа превышений в области захвата и построение бинарного поля, описывающего область захвата, где знаками «1» обозначаются области расположения объектов, а знаками «0» - фон. Дальнейшая обработка и выделение объекта-цели и объектов-помех производятся по критериям площади, формы и количеству целей, находящихся в области захвата, в соответствии с приведенным на фиг. 3 алгоритмом.
С разъема X1 видеосигнал поступает на вход блока 28 выделения синхроимпульсов (СИ), предназначенного для выделения синхроимпульсов из видеосигнала, которые поступают на вход порта 27 ввода-вывода, предназначенных для определения начала и конца кадра изображения, а также определения координат области захвата.
На смесителе 29 происходит наложение на видеосигнал дополнительных импульсов, вырабатываемых ЦПУ 33 и выводимых при помощи порта 27 ввода-вывода, предназначенных для отображения границ рамки области захвата на изображении. Далее видеосигнал с отображенной рамкой области захвата поступает через третий буферный каскад 30 на технологический разъем Х4.
По результатам обработки, в соответствии с алгоритмом (см. фиг. 3), ЦПУ 33 генерирует команду сигнала захвата, поступающую в порт 27 ввода-вывода, выдающего электрический сигнал заданного напряжения, поступающего на разъем Х3.
Пример выполнения блоков МЗЦ можно пояснить следующим образом.
ТПВ-модуль 35 может включать приемник S5IR и объектив SupIR 50mm f/1.7.
ТВ-модуль 36 может включать приемник VNI-752-H3-VS и объектив SAF-M50.
Фильтры 18 и 19 каналов ТВ и ТПВ соответственно могут представлять собой RLC-фильтры.
Переключатель 20 может быть выполнен на основе переключателя движкового ПД19-3
Первый 21, второй 22 и третий 30 буферные каскады могут быть выполнены на основе сдвоенного операционного усилителя 544УД16УЗ.
В качестве микроконтроллера 24 может быть использован микроконтроллер 1986ВЕ92У.
Блок 28 выделения СИ может быть выполнен на основе сдвоенного операционного усилителя 544УД16УЗ, компаратора 1467СА1Т и RC-фильтров.
Смеситель 29 может быть построен на основе RC-цепочки и импульсного диода 2Д706АС9.
Блок 34 питания, включающий повышающий преобразователь (5,5В/12В), стабилизатор (5,5В/3,3В), стабилизатор (5,5В/5В), может быть выполнен на ИМС: 1156ЕУ1, 1158ЕН3.3ВХ, 1158ЕН5ВХ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронная многоканальная головка самонаведения | 2020 |
|
RU2756170C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ УТЕЧЕК В ТРУБОПРОВОДЕ | 1994 |
|
RU2081369C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| ПОРТАТИВНАЯ КОРОТКОВОЛНОВАЯ - УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2823629C1 |
| ПРИЕМНИК ИМИТАТОРА БОЕВЫХ СРЕДСТВ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2018 |
|
RU2678875C1 |
| СПОСОБ ДЛЯ ЦИФРОВОЙ СУБСТРАКЦИОННОЙ АНГИОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043073C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| ТРЕХСПЕКТРАЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2022 |
|
RU2808963C1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ НАБЛЮДЕНИЯ В УСЛОВИЯХ СЛОЖНОЙ ОСВЕЩЕННОСТИ И/ИЛИ СЛОЖНОЙ ЯРКОСТИ ОБЪЕКТОВ | 2007 |
|
RU2362275C1 |
Изобретение относится к системам наведения и обнаружения цели и может быть использовано в составе учебного переносного зенитного ракетного комплекса (ПЗРК). Модуль захвата цели (МЗЦ) содержит объектив (6), установленный перед приемником (7), соединенным с двумя платами (9, 10) блока цифровой обработки (БЦО), связанными между собой посредством крепежных винтов (3). МЗЦ выполнен в размерах корпуса «холодильника» переносного зенитно-ракетного комплекса (ПЗРК) и представляет собой конструкторскую сборку цилиндра (1) и полусферы (2), соединенных между собой с помощью винтовых соединений. В цилиндрической части (1), имеющей с внешней стороны зафиксированную крышку (15), последовательно установлены и зафиксированы с помощью элементов крепления упомянутые объектив (6) и приемник (7), а в сферической части (2) к внешней широкой стенке полусферы с ее внутренней стороны прикреплены две упомянутые платы БЦО (9, 10). БЦО выполнен с возможностью автоматического выделения цели в условиях фоновой обстановки путем сравнения с автоматически формируемым порогом контрастности и задаваемой площадью цели и формирования электрического сигнала захвата при попадании цели в область захвата, соответствующую требуемому значению телесного угла удержания цели. БЦО выполнен с дополнительной возможностью выделения цели на фоне помех по форме и количеству объектов в зоне захвата и возможностью обработки сигналов как от микроболометрического, так и от телевизионного приемников. Конструкторская сборка цилиндра (1) и полусферы (2) выполнена с возможностью их разъединения. Объектив (6) зафиксирован в цилиндрической части модуля с помощью уплотнительного кольца (5), создающего совместно с установленным перед объективом защитным стеклом (16) герметичный объем корпуса со стороны объектива. Приемник (7) зафиксирован с помощью стопоров держателей (4). Обеспечивается захват цели, распознавание помех по форме и количеству объектов в зоне захвата, расширяется диапазон условий использования МЗЦ путем применения как тепловизионного, так и телевизионного модуля. 5 з.п. ф-лы, 3 ил.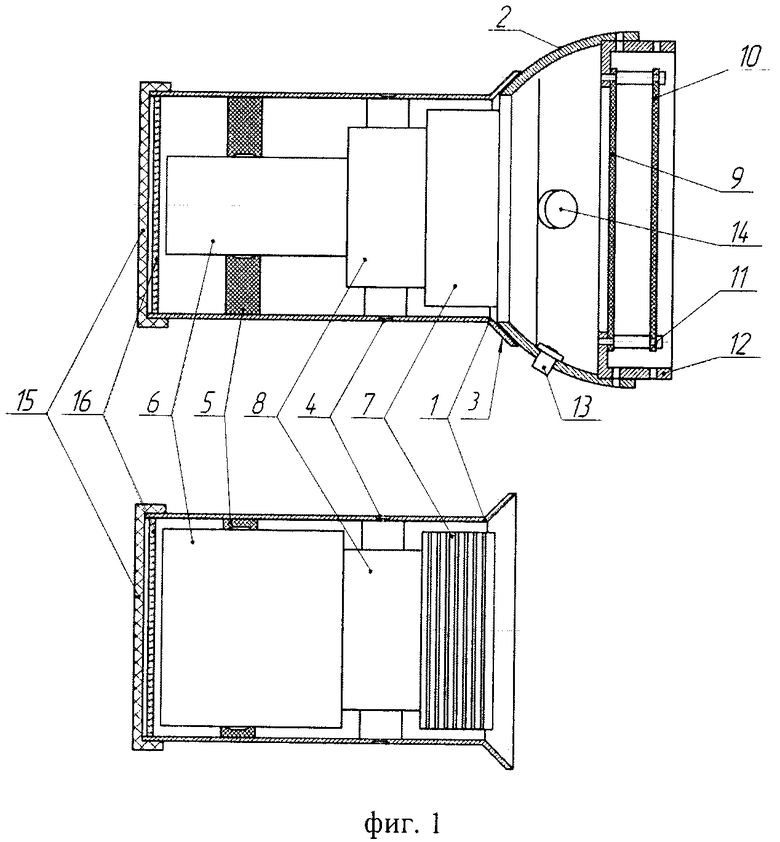
1. Модуль захвата цели, содержащий объектив, установленный перед приемником, соединенным с двумя платами блока цифровой обработки (БЦО), связанными между собой посредством крепежных винтов, при этом модуль выполнен в размерах корпуса «холодильника» переносного зенитно-ракетного комплекса (ПЗРК) и представляет собой конструкторскую сборку цилиндра и полусферы, соединенных между собой с помощью винтовых соединений, причем в цилиндрической части, имеющей с внешней стороны зафиксированную крышку, последовательно установлены и зафиксированы с помощью элементов крепления упомянутые объектив и приемник, а в сферической части к внешней широкой стенке полусферы с ее внутренней стороны прикреплены две упомянутые платы БЦО, при этом БЦО выполнен с возможностью автоматического выделения цели в условиях фоновой обстановки путем сравнения с автоматически формируемым порогом контрастности и задаваемой площадью цели и формирования электрического сигнала захвата при попадании цели в область захвата, соответствующую требуемому значению телесного угла удержания цели,
отличающийся тем, что конструкторская сборка цилиндра и полусферы выполнена с возможностью разъединения цилиндра и полусферы для установки различных типов объектива и приемника, при этом объектив зафиксирован в цилиндрической части модуля с помощью уплотнительного кольца, создающего совместно с установленным перед объективом защитным стеклом герметичный объем корпуса со стороны объектива, а приемник - с помощью стопоров держателей, а БЦО выполнен с дополнительной возможностью выделения цели на фоне помех по форме и количеству объектов в зоне захвата и возможностью обработки сигналов как от микроболометрического, так и от телевизионного приемников.
2. Модуль захвата цели по п. 1, отличающийся тем, что содержит сменный тепловизионный (ТПВ) модуль канала обнаружения цели, в котором объектив представляет собой инфракрасный объектив, а приемник выполнен в виде болометрического приемника.
3. Модуль захвата цели по п. 1, отличающийся тем, что содержит сменный телевизионный (ТВ) модуль канала обнаружения цели, который включает телевизионный объектив и телевизионный приемник.
4. Модуль захвата цели по п. 1, отличающийся тем, что БЦО предлагаемого модуля содержит два входных фильтра ТПВ-канала и ТВ-канала обнаружения цели соответственно, два буферных каскада, микроконтроллер, имеющий в своем составе центральное процессорное устройство (ЦПУ), модули аналогово-цифрового преобразования (АЦП), цифро-аналогового преобразования (ЦАП), и компаратор, а также блок выделения синхроимпульсов (СИ), смеситель, третий буферный каскад, при этом входом БЦО является вход соответствующего входного фильтра, выходом связанного через переключатель и буферные каскады со входом АЦП микроконтроллера и соответствующим входом компаратора микроконтроллера, другой вход компаратора соединен с выходом ЦАП микроконтроллера, входы порта ввода-вывода микроконтроллера соединены с выходами переключателя и блока выделения синхроимпульсов (СИ) соответственно, первый выход порта ввода-вывода микроконтроллера соединен с соответствующим входом смесителя, другой вход которого соединен с входом соответствующего фильтра, а выход смесителя - с входом третьего буферного каскада, связанного выходом с технологическим разъемом, предназначенным для управления параметрами МЗЦ и получения изображения для контроля его работы, второй выход порта ввода-вывода микроконтроллера является выходом сигнала захвата цели, причем порт ввода-вывода микроконтроллера связан внутренней шиной данных микроконтроллера с центральным процессорным устройством и с интерфейсом программирования, выход интерфейса программирования подключен к технологическому разъему, служащему для управления параметрами МЗЦ и контроля его работы через общую шину МЗЦ.
5. Модуль захвата цели по п. 1, отличающийся тем, что снабжен блоком питания для генерации и стабилизации напряжений 3,3 В, 5,5 В и 12 В, установленным на одной из плат БЦО.
6. Модуль захвата цели по п. 1, отличающийся тем, что содержит осушительный патрон с силикагелем, закрепленный на сферической части корпуса через технологические отверстия.
| Конвейер для пошивочных цехов обувных фабрик | 1960 |
|
SU135404A1 |
| Переносная механическая наводка для приводных ремней | 1927 |
|
SU7173A1 |
| ДВУХКАНАЛЬНЫЙ ПРИЦЕЛ НОЧНОГО ВИДЕНИЯ | 2002 |
|
RU2296938C2 |
| WO 03062773 A1, 31.07.2003. | |||

