Изобретение относится к области авиационного тренажеростроения, устройств вычислительной техники и предназначено для тренировки экипажей, решения задач научно-технических разработок.
Известна система виртуальной реальности VFX1 [1]. Система имеет три степени свободы изображения - вращения и управления по трем координатам; состоит из шлема с высокой разрешающей способностью, 3-мерным цветным изображением и 3-мерным стереозвуковым сопровождением. Открытая архитектура шлема и головы удобна пользователям кибернетического пространства.
Система VFX1 состоит из следующих встроенных модулей:
- система отслеживания движения головы, гарантирует точное вхождение и быструю обратную связь, переносящую оператора в "виртуальный мир"; система отслеживания обеспечивает вращение, бросок и отклонение от направления для точной визуальной ориентации;
- опускающийся козырек позволяет оператору системы использовать ПЭВМ, не снимая виртуального шлема (ВШ) с головы, когда оператор не "погружен в виртуальность", он может поднять козырек ВШ, когда готов ко входу в виртуальную реальность, опускает козырек;
- встроенный конденсаторный микрофон дает возможность голосового общения (при участии нескольких партнеров), распознавания голоса при погружении в интерактивное кибернетическое пространство; микрофон встроен в козырек, связан со звуковой платой усиления;
- блок трехмерного стереоскопического изображения с использованием двух цветных жидкокристаллических (ЖК) дисплеев с высококонтрастным изображением (789•230 строк). Каждый глаз видит свое изображение, при этом оба изображения синхронизированы, обеспечивают глубину видения, что способствует максимальной реалистичности стереоизображения, которое переносит в область, где происходит действие;
- стереонаушники-стереодинамики высокого качества, связанные со звуковой платой для воспроизведения звуков виртуальной реальности; используется система трехмерного звука;
- двухмерный кибернетический орган управления (типа "теннисного мяча"), который освобождает пользователя от ограничений, связанных с "мышью" или джойстиком; "тенисный мяч" оснащен программированными кнопками и удобным эргономическим контролем (управлением), связан с платой расширения;
- интерфейсная плата расширения для связи подсистем соединена с платой экрана и помогает использовать шлем для связи с прикладными программами (плата выполнена как адаптер для соединения внешних устройств виртуальной реальности: перчатки, ботфорты, жилет со встроенными сенсорами и др.).
Дисплей - трехмерный стереоскопический с активными жидкокристаллическими матрицами с разрешением 789•230 (181.470 пикселей) обеспечивает высококонтрастное цветное видеоизображение размером 10,6•14,3 мм (35,2•53o); оптическую систему можно регулировать, изменять приближенность лица оператора, а также подстраивать под различные межзрачковые расстояния.
Компьютерное кибирнетическое пространство обеспечивается с помощью миниЭВМ.
Однако данная система не удовлетворяет требованиям точности по воспроизведению условий полета в кабине современных самолетов, особенно в сложных метеорологических условиях при посадке, ведении режимов воздушного боя и др.
Известен [2] имитатор видимости в сложных метеорологических условиях (СМУ), содержащий очки, выполненные на основе жидких кристаллов (ЖК), взглядоотметчик, телевизионную камеру, схему ИЛИ, блок управления секторами, фотометрический блок, на каждый глаз установлены полупрозрачный отражатель, линза Френеля, слой жидкого кристалла в виде оптического клина с дискретным градиентом, дополнительная волоконно-оптическая линия связи, дополнительный источник света, датчики высоты, крена, расстояния, блоки деления, вычислитель определения величины arctg, управления полосами ЖК оптического клина, блок модуляторов, систему определения углов поворота головы летчика, включающую импульсные источники света, расположенные в кабине, фотоприемники, расположенные на шлеме летчика, генератор опорного напряжения, фазочувствительный детектор, управляемый источник питания, компараторы, усилители. Датчики высоты и расстояния соединены с блоком деления, выход которого через блок определения величины arctg соединен с первым входом первого компаратора, второй вход которого соединен датчиком крена, выход первого компаратора соединен с первой схемой ИЛИ и далее последовательно с блоком управления полосами ЖК, блоком модуляторов и градиентными полосами ЖК, второй и третий входы блока управления соединены соответственно с фотоприемником внешней освещенности задатчиком расстояния видимости, второй вход первого блока ИЛИ соединен с выходом второго и третьего компараторов, входы которых соединены с первым и вторым сумматорами, первые входы которых соединены с частотным детектором, а вторым - с блоком измерения углов глаз с помощью телевизионной камеры, оптически связанной с взглядо-отметчиком, другой выход телевизионной камеры - с блоком измерения межцентрового расстояния глаз и далее связан со входом четвертого компаратора и со второй схемой ИЛИ, другой вход которой связан с датчиком миганий глаз, а выход - с блоком управления секторами, и через него - с блоком управления полосами ЖК, первый вход частотного детектора соединен с генератором опорной частоты, второй вход - через инвертор, а третий и четвертый входы соединены с выходами усилителей, а генератор опорной частоты через управляемый блок питания соединен с излучающими фотодиодами.
Недостатком являются ограниченные функциональные возможности имитатора.
Цель изобретения - повышение степени достоверности (масштаба, глубины реальности) имитации полета летательного аппарата (ЛА) при ручном визуальном управлении летчиком, повышение качества и быстроты обучения летчиков.
Система имитации визуальной ориентировки летчика (СИВОЛ) - система виртуальной реальности (СВР) позволяет моделировать в реальном времени с большей степенью реальности режимы аварийных ситуаций вплоть до разрушения ЛА, видимость в сложных метеоусловиях, например при появлении ореолов соляного тумана, полет группы ЛА при сверхзвуковом полете, динамические режимы полета типа "кобры Пугачева" и др.
Для выполнения указанной цели в систему СИВРО авиационного тренажера, состоящей из виртуального шлема с системой цветного стереоскопического изображения с жидкокристаллическими (ЖК) матрицами, полупрозрачными отражателями и ЖК-масками, связанными с выходами видеосмесителя, стереофонической системы с встроенным микрофоном и стереонаушниками, рецепторных устройств, установленных в перчатках, ботфортах (наколенниках), жилете (бронежилете), оборудованных датчиками перемещений, усилий и электроприводами, соединенных через платы расширения и контроллеры с миниЭВМ отработки сигналов рецепторных устройств, органами управления, соединенными с вычислителем динамики полета и вычислителем навигационной системы, пульта инструктора, системы определения углов поворота головы летчика, с фазочувствительным детектором (ФЧД), а вычислительный блок динамики полета соединен с миниЭВМ обработки сигналов рецепторных устройств, в нее введены измеритель расстояния между зрачками глаз (ИРМЗГ), измеритель углов поворота зрачков глаз (ИУПЗГ), связанный с ним двумя входами измеритель углов поворота взора (ИУПВ), датчик мигания, подключенный к входу блока управления ЖК-масок, фотометрический блок, блок видеосценариев, блок выбора телевизионного кадра, соединенный с кнопкой включения на ручке управления тренажера, блок сегментации, подключенный к входам блока видеосценариев, к пульту инструктора, к выходу навигационного вычислителя, к первому выходу ИУПВ, блок нелинейного монтажа, связанный первым входом с знакогенератором, вторым входом с блоком сегментации, третьим входом с фотометрическим блоком, четвертым входом с логическим блоком, пятым входом с вычислителем динамики полета, первым выходом с блоком нелинейного монтажа, вторым выходом со стереофонической системой, третьим выходом с блоком управления ЖК-масок, синтезатор образов, при этом три входа блока выбора телевизионного кадра подключены соответственно ко второму выходу ИУПВ, к выходу ИРМЗ, к выходу датчика мигания, семь входов видеосмесителя подключены соответственно к блоку синтезатора образов, вторым и третьим входами к двум выходам блока ИУПВ, четвертым входом к блоку нелинейного монтажа, пятым, шестым, седьмым входами к блоку сегментации, фотометрическому блоку, к пульту инструктора, первый и второй выходы видеосмесителя подключены к ЖК-экранам виртуального шлема, два входа измерителя углов поворота взора связаны с ФЧД измерителя углов поворота головы летчика, вход телевизионной камеры через волоконные световоды с призмой оптически связан с выходными зеркалами взглядоотметчика, а выход телевизионной камеры подключен к входу измерителя углов поворота зрачков и входу измерителя расстояния между зрачками.
Сущность изобретения поясняется на фиг. 1, на которой изображена структурная схема СИВОЛ;
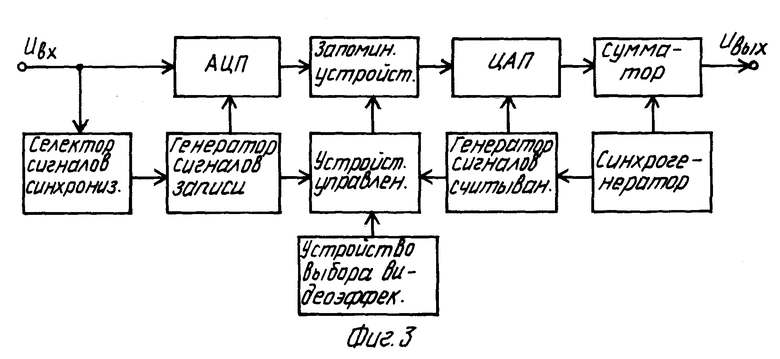
на фиг. 2 - узел съема оптических сигналов положения глаз летчика, на фиг. 3 - блок-схема системы сложения изображений и образования видеоэффектов.
1 - виртуальный шлем,
2 - глаза летчика,
3 - взглядоотметчик с зеркалами, линзами, отражателями,
4 - источник света,
5, 10 - линзы,
6 - волоконные световоды передачи индексов (меток) глаз,
7 - прямоугольная призма,
8, 11 - полупрозрачные отражатели (зеркала).
9 - жидкокристаллические (ЖК) экраны,
12 - жидкокристаллические (ЖК) маски,
13, 14 - полупроводниковые источники света,
15, 16, 17 - фотоприемники,
18 - измеритель углов поворота головы оператора,
19 - блок управления ЖК-масками, включающий модулятор и генератор,
20 - управляемый источник питания,
21 - усилители,
22 - инвертор,
23 - видеосмеситель,
24 - фотометрический блок внешнего излучения,
25 - знакогенератор,
26 - приемо-передающая телевизионная камера с объективом,
27 - датчик мигания,
28 - встроенный микрофон,
29, 30 - стереофонические наушники,
31 - перчатка,
32 - оптиковолоконные датчики изгиба натяжения, абсолютного положения и тактильные датчики,
33 - жилет оператора,
34 - нагрудник,
35 - датчики изгиба, натяжения, тактильные датчики,
36 - ботфорты оператора,
37 - датчики изгиба, натяжения,
38 - кнопка включения на ручке управления,
39 - авиационный комплексный тренажер,
40 - датчики органов управления тренажера с системами загрузки усилий, кнопками включения,
41 - датчики усилий и перемещений,
42 - электроприводы воздействия на органы чувств оператора (летчика),
43 - вычислитель блока динамика полета самолета,
44 - система стереофонического звучания,
45 - измеритель расстояния между зрачками глаз (ИРМЗГ),
46 - измеритель углов поворота зрачков глаз,
47 - измеритель поворота углов взора оператора,
48 - фазочувствительные детекторы (ФЧД),
49 - генератор опорной частоты,
50 - блок видеосценариев,
51 - блок нелинейного монтажа,
52 - блок сегментации,
53 - синтезатор образов кибернетического пространства,
54 - блок выбора телевизионного кадра
55 - система визуальной ориентировки,
56 - вычислитель системы навигации самолета,
57 - ЭВМ обработки сигналов рецепторных устройств движений и перемещений оператора.
58 - пульт инструктора обучения летчика,
59 - кресло летчика,
На фиг. 2 изображены
60, 70 - триггер (ключ),
61 - счетчик импульсов,
62 - генератор импульсов,
63 - цифроаналоговый преобразователь (ЦАП)
64, 73 - компаратор,
65 - инфракрасный (ИК) фотодиод,
66 - опорный генератор,
67 - схема И-НЕ,
68 - интегратор,
69, 71 - инвертор,
72 - ограничитель,
74 - фотоприемник.
Виртуальный шлем 1 состоит из системы цветного стереоскопического изображения с ЖК-матрицами 9, линзами 10, полупрозрачными зеркалами 11, видеосигналами 23, системы стереофонического звучания 44 со встроенным микрофоном 28 и стереонаушниками 29, 30, рецепторные устройства СВР состоят из перчаток 31, ботфортов 36, жилета (бронежилета) 33, оборудованных датчиками изгиба, натяжения, тактильными датчиками, датчиками абсолютного положения 32, 35, 37, а также электроприводами 42, нагрудником 34 (динамики), соединенными через платы расширения и контроллеры с миниЭВМ обработки сигналов рецепторных устройств 37. Комплексный авиационный тренажер 39 состоит из кабины с креслом 59, приборной доской, органами управления с кнопками включения 38, датчики 40 усилий и перемещений которых соединены с вычислительным блоком динамики полета 43, вычислителем навигационной системы 56, системы визуальной ориентировки 55, соединенной с системами 43 и 56, выходные полупрозрачные зеркала взглядоотметчика 8, оптически связаны волоконными световодами 6 с прямоугольной призмой 7 и далее с телевизионной передающей камерой 26, выход которой связан с блоками ИРМЗГ 45 и ИУПЗГ 46, соединенного с ИУПВ 47, выход которого соединен с первым входом блока выбора телевизионного кадра 54, а второй вход его связан с измерителем ИРМЗГ 45, а третий вход связан с датчиком миганий 27, выход логического блока 54 соединен с первым входом синтезатора образов 53, второй, третий, четвертый и пятый входы связаны со знакогенератором 25, фотометрическим блоком 24, блоком сегментации 52, вычислительным блоком динамики полета 43, а выходы его 53 связаны со стереофонической системой 44, блоком нелинейного монтажа 51, блоком управления БУЖМ 19, вторые входы измерителя ИУПВ 47 связаны с ФЧД 48 измерителя углов поворота головы 18, а вторые входы ИУПВ 47 связаны с блоком нелинейного монтажа 51, третьи выходы ИУПВ 18 соединены с видеосмесителями 23, вторые, третьи, четвертые, пятые, шестые входы видеосмесителей 23 соединены с блоком сегментации 52, синтезатором образов 53, фотометрическим блоком 24, блоком нелинейного монтажа 51, с пультом инструктора 58, а выходы соединены с ЖК-экранами 9, вход блока сегментации 52 соединен с кнопкой включения 38 на ручке управления 40 тренажера 39, входы блока нелинейного монтажа 51 соединены с блоком видеосценариев 50, пультом инструктора 58, вычислителем навигационной системы 56 тренажера 39, пульт инструктора 58 соединен со стереофонической системой 44, а выход фотометрического блока 24 соединен с блоком управления ЖК-масками 19. Управляемый источник питания 20 измерителя углов поворота головы 18 соединен с источниками света 13 и 14 и генератором опорной частоты 49, соединенным с ФЧД 48, а фотоприемники 15, 16, 17, установленные на виртуальном шлеме 1, соединены с усилителями 21 и далее с ФЧД 48, причем один из выходов усилителя 21 через инвертор 22 также соединен с ФЧД 48, а вычислительный блок динамики полета 43 соединен с миниЭВМ 57 обработки рецепторных устройств.
Внутри шлема (фиг. 2) устанавливаются миниатюрные источники света 4 линзы 5 и оптическая схема, состоящая из волоконных световодов 6 и призмы 7 и связанная с объективом телевизионной передающей камеры 26. Последняя соединена с блоком обработки сигнала ИРМЗГ 45, где последовательно связана с триггером 60 и далее со счетчиком импульсов 61. Счетчик импульсов 61 связан с генератором импульсов 62, а выход счетчика импульсов 61 связан с ЦАП 63, который соединен с компаратором 64 и далее с блоком выбора телевизионного кадра 54, который другим входом соединен с триггером 70, входящим в состав датчика миганий глаз 27. ИК-диод соединен с опорным генератором 66 и далее последовательно с ячейкой И-НЕ 67, интегратором 68, инвертором 69, триггером 70. Другой вход триггера 70 соединен с выходом инвертора 71. Выход фотоприемника 74 соединен последовательно с компаратором 73, ограничителем 72 и инвертором 71, другой выход которого соединен со вторым входом ячейки И-НЕ 67. Выход триггера 70 соединен со вторым входом 54.
Электрические сигналы для изменения прозрачности ЖК-масок 12 поступают на блок управления 19, состоящий из модуляторов, соединенных с генератором импульсов. Генератор, например, прямоугольных импульсов выполнен с помощью активных полупроводниковых устройств, или на основе мультивибратора.
Система работает следующим образом.
Действительное изображение предмета формируется в параллельных пучках в заданных фокальных плоскостях линз 10. Линзы 10 устанавливаются на базе глаз летчика в пределах 56 - 78 мм, не нарушая параллельности оптических осей в бинокулярных коллиматорных каналах. Изображения ЖК-экранов 9 находятся в фокальных плоскостях линз 10.
При фиксации взгляда на разноудаленных по глубине объектах зрительные оси глаз либо сходятся вследствие конвергенции при восприятии вблизи расположенных объектов (приборная доска), либо направлены параллельно друг другу при восприятии предметов внекабинного пространства; в среднем время конвергенции 0,13 - 0,18 с. Глаз человека облучается находящимся в определенном от него направлении источником 4 слабого невидимого излучения, не представляющего опасности для зрения. Это излучение отражается от сферической поверхности пограничного слоя между воздухом и роговой оболочкой и от сетчатки глаза 2. Лучи, отраженные от роговой оболочки глаза, формируют изображение в виде яркой точки в плоскости зрачка глаза, а лучи, отраженные от сетчатки, "подсвечивают" зрачок.
Формирующая оптическая система источника света 4 проецирует картину, получаемую в главной плоскости зрачка глаза, на телевизионную камеру 26. На камеру 26 проецируется светящаяся точка и зрачок глаза в виде равномерно освещенного диска на сравнительно темном фоне. При изменении направления взора оператора поворотом оси глаза относительно оси оптической системы источника излучения 4 происходит взаимное смещение этих двух изображений, которые являются носителем информации об угле поворота глаза 2.
Измерение расстояния между центрами зрачков глаз дает возможность точно определить, как зрительные оси глаза сходятся вследствие конвергенции при восприятии вблизи расположенных объектов, и расстояние видимости D. При переводе взгляда летчика от далеких к близким предметам во время процесса имитации режимов полета задача осложняется тем, что летчик перемещает головку и глаза. Поэтому конструктивно взглядоотметчик соединен волоконной линией связи с призмой 7 и далее с объективом телевизионной камеры 26.
Для измерения расстояния между зрачками сигнал с выхода передающей камеры 26 поступает на блок 45. Здесь видеосигналы меток выделяются на основе различия их амплитуды и амплитуды сигнала фона. Это осуществляется путем отсечки импульсов с меньшей амплитудой. Далее пики импульсов поступают на схему ключа, триггер 60, где сигналы телевизионной камеры 26, поступающие в блок 45, на входном усилителе, на котором смешиваются сигналы зрачков глаз, и накладываются на пилообразную развертку. Электрические импульсы открывают схему ключа на время Tx [6]. Интервал времени Tx заполняется квантующими импульсами с периодом повторения T0 от генератора импульсов. Сигнал из счетчика импульсов 61 поступает в ЦАП 63, который запускается в работу при появлении 2-го импульса-метки с ТВ-камеры 26. ЦАП 63 усредняет напряжение на выходе и не сбрасывает, пока не пришел следующий импульс. С помощью ЦАПа выделяется в аналоговой форме управляющее воздействие. ЦАП состоит [9] из регистра, в который заносится и хранится цифровой код, подлежащий преобразованию в аналоговую величину, источника стабильного напряжения и цифрового делителя напряжения, состоящего из декодирующей сети, сопротивлений и ключей.
Цифровой код, подлежащий преобразованию в аналоговую величину, по импульсу "Занесение" заносится на триггеры регистра ЦАП 63, где хранится до прихода следующего импульса "Занесение". В зависимости от состояния триггеров происходит переключение ключей.
Общее выходное напряжение ЦАП 63 Uвых равно сумме напряжений, включенных разрядов с учетом их веса. В блок ИУПЗ 46 поступают сигналы с телевизионной камеры 26 для измерения угла поворота зрачков глаз летчика в горизонтальной и вертикальной плоскостях. Для этого считаются счетчиком импульсы в течение времени с начала такта кадровой развертки до первого импульса глаза, а схему запускает триггер-элемент совпадения. Далее сигналы поступают на ЦАП [5, 6].
Подобным же образом измеряется величина угла поворота зрачка глаз в продольной плоскости. С усилителя-смесителя кадровой развертки, входящего в блок ИУПЗ 46, сигналы поступают на схему измерения углов глаза в продольной плоскости. Для этого считаются импульсы с этого усилителя счетчиком, который соединен с генератором импульсов. Данный счетчик запускается при нулевом сигнале кадрового генератора и останавливается схемой совпадения зрачка и кадровой развертки.
Т. к. наблюдаемые метки имеют небольшие размеры, то при развертке изображения по строкам будут получены короткие видеоимпульсы, сдвинутые во времени от начала строки. При смещении глаза по высоте (ниже, выше) метки будут смещаться по кадровой развертке.
Обеспечение высокой точности определения углов поворота и пространственного расстояния взора при одновременном сохранении естественности условий работы пилота требует выделения информации о величине отклонения оси глаза летчика при одновременном смещении его головы. Определение взаимного положения головки летчика и регистрации движений глаза выполняется путем размещения аппаратуры на виртуальном шлеме 1.
Принцип выделения сигналов рассогласования между каналами следующий. Если оптические расстояние одинаковы для приемников лучистой энергии 15, 16, 17 (ПЛЭ) и на каждый из них попадают два световых потока 15 - 16 и 16 - 17, равных по амплитуде и противоположных по фазе, от источников 13 и 14. Поэтому на частотном фазово-чувствительном детекторе (ФЧД) сигнал равен нулю. В том случае, когда оптические расстоянии не равны, на ПЛЭ попадают неравные по амплитуде световые потоки противоположных фаз. Управляющий сигнал на выходе ФЧД 48 будет отличен от нуля и полярность соответствует знаку угла курса или тангажа Δψ и Δϑ.
Фазовый детектор 48 создает на своем выходе напряжение, пропорциональное сдвигу фаз между двумя сигналами: между сигналом Uм, соответствующим сигналу от излучателя, и сигналом Uоп от генератора опорного напряжения 15. Указанный сдвиг фаз ϕ определяется по формулам

если обозначить C = Uм/Uоп, то
при C << 1
U1 ≈ Uоп(1+2C cosϕ);
U2 ≈ Uоп(1-2C cosϕ),
следовательно
Uc = Kдт(U1-U2) = KдтUопC cosϕ,
где Kдт - коэффициент передачи интегрирующей цепочки детектора.
Формирование сигналов, содержащих информацию о величине и направлении рассогласования, осуществляется с помощью фазочувствительного детектора (ФЧД) 48.
В логическом блоке 54 реализованы следующие алгоритмы
1) При работе датчика миганий 27:
2) Для блока нелинейного монтажа 51:
Если дальность видения D > δ1, и D > δ2, то крупный план.
Если D > δ3, то средний план.
Если D > δ4, то дальний план; δ1-δ4 - вводимые ограничения.
Если угол тангажа ϑ > ϑo и нажата кнопка, то включается блок 52 сегментации.
3) Компаратор блока 54;
Если D > δ, то открыты ЖК-маски.
Если D < δ, то закрыты ЖК-маски.
Частота мигания у летчика меняется в довольно широких пределах и измеряется датчиком миганий 26, размещенным в оправе виртуального шлема 1. Он реагирует на разность коэффициентов отражения ИК-света 64 от кожи век и от роговицы глаза. ИК-светодиод 65 облучает глаз в импульсном режиме и питается от опорного генератора 66. Отраженное глазом излучение попадает на фотоприемник 74 - фотодиод, сигнал с которого поступает на компаратор 73 и сравнивается с заранее заданным уровнем; уровень сравнения устанавливается таким, чтобы компаратор 73 срабатывал только при закрытом состоянии глаза. Далее импульсы с компаратора 73 через ограничитель уровня 72, инвертор 71 подаются на вход триггера 70, который первым же импульсом переводится в состояние логической единицы. Кроме того, эти же импульсы поступают на второй вход логической схемы 67 типа И-НЕ, первый вход которой связан с опорным генератором 66. На выход схемы И-НЕ 61 проходят импульсы от генератора 65 только при открытом состоянии глаза, т.е. тогда, когда сигнал с компаратора 73 не поступает. Со схемы И-НЕ 67 импульсы через интегратор 68 и инвертор 69 подаются на вход триггера 70, который после открытия глаза первым же импульсом переводится в состояние логического нуля. Перепад напряжения с выхода триггера 70, сигнал, характеризующий длительность и частоту миганий глаз, поступает в логический блок 54, сигнал датчика миганий в логическом блоке 54 обеспечивает отсутствие разрыва электрической цепи открытия-закрытия ЖК-масок.
Телевизионная камера 26 - малогабаритный твердотельный фотоэлектрический преобразователь на основе прибора с зарядовой связью (ПЗС) [3]. Основной элемент камеры - матрица ПЗС, фиг. 2, преобразует с помощью объектива распределение светового потока в плоскости матрицы и поверхностное распределение фотогенерированных неосновных носителей заряда - потенциальный рельеф (секция накопления). Затем во время следования кадрового гасящего импульса все поле зарядов перемещается в соответствующие зоны хранения - потенциальные ямы, экранированные от светового потока (секция памяти). В течение следующего периода накопления во время следования строчных гасящих импульсов заряды построчно перемещаются из секции памяти к выходному регистру сдвига. В нем в период активной части строки заряды продвигаются к выходному устройству, образованному полупроводниковыми структурами по типу полевых транзисторов. Таким образом на выходе матрицы образуется телевизионный сигнал в виде поэлементной последовательности импульсов различных амплитуд, пропорциональных освещенности элементов секции накопления. Перемещение зарядов в матрице ПЗС-развертка изображения - производится с помощью тактовых импульсов, образующихся в формирователях импульсов секции накопления, памяти (ФИП) и выходного регистра (ФИВ) из шумов синхрогенератора (СГ). Телевизионная камера обеспечивает передачу изображений с четкостью 350 - 500 телевизионных линий и отношением сигнал/помеха 50 дБ при номинальной освещенности до 1 - 2 тыс. лк, контрастность цели - 85%.
ЖК-плоские матричные экраны 9 [9] имеют ≈ 50 тыс. число элементов изображений. ЖК помещаются в зазоре толщиной 7 - 8 мкм между двумя стеклянными пластинами. Для формирования элементов растра на внутреннюю поверхность одной пластины наносится тонкопленочная структура в виде квадратных электродов и управляющих транзисторов (по числу элементов изображения), а на внутреннюю поверхность другой пластины - матрица цветных светофильтров и общий электрод. Число выводов управления может быть сокращено нанесением на пластины ортогональной системы (строчных и столбцовых) шин, на перекрестии которых формируется элемент изображения. При подаче напряжения на электроды прозрачность ЖК на соответствующих участках изображения меняется благодаря переориентации молекул.
ЖК-маски 12 типа "сэндвич", изготовленные из прозрачных стеклянных электродов, покрытых проводящим слоем, между которыми помещен нематический слой, стеклянные пластины покрыты с обратной стороны прозрачным электропроводящим слоем двуокиси цинка и окиси индия, электроды припаяны к слоям двуокиси олова. Между стеклами зафиксирован определенный зазор, весь набор стекол заклеен с торцов, где находятся прокладки. Величина зазора между стеклами определяет время срабатывания ЖК-время реакции; так, если толщина прокладки 10 мкм, то время реакции составляет десятые доли секунды. При включении напряжения стекла становятся молочно-мутными, при выключении - прозрачными, т. е. наблюдается эффект динамического рассеяния света, позволяющий имитировать рассеивающие среды.
В нематическом ЖК с отрицательной диэлектрической анизотропией под действием электрического поля при пороговом напряжении Uпор образуется доменная структура. Дальнейшее повышение напряжения до другого порогового значения вызывает в ЖК турбулентное движение из-за протекания ионного тока в нематике, в результате чего возникают произвольно ориентированные зоны размером 1 мкм, обладающие двулучепреломлением. Благодаря наличию этих зон образец ЖК сильно рассеивает свет.
Для выравнивания освещенности изображения рабочих полей ЖК-матрицы 9 в соответствии с изменением освещенности системы внекабинного пространства и системы визуальной ориентировки 55 служит фотометрический блок 24 с фотоприемником, выполненным на основе мостовой схемы [8].
Сигналы с синтезатора образов 53 поступают на блок управления ЖК-масками 19, состоящий из модуляторов соединенных с генератором импульсов. В модуляторах происходит изменение амплитуды колебаний, осуществляемое значительно медленнее, по сравнению с периодом этих колебаний - малое изменение за период. Модуляторы блока 19 содержат нелинейные электрические цепи, способные менять амплитуду параметров ЖК-матриц 9.
В блоке сегментации 52 изображения описываются как совокупность составляющих его связных областей. Для выявления областей на изображении используют методы "серой шкалы", сегментации предшествует сглаживание или фильтрация исходного изображения. Для бинарного изображения сегментация сводится к выделению связных областей. Связные области можно разъединять, объединять, выделяя отдельные объекты изображения. Алгоритм "серой шкалы" для выделения связных областей на бинарном изображении реализуется размером m x m элементов, окаймленном со всех сторон нулевыми элементами. Матрица (m + 2) • (m + 2) просматривается слева направо и сверху вниз до тех пор, пока не встретится единичный элемент S(i, j). Далее производят проверку, имеются ли для S(i, j) "единичные соседи" справа. Если справа нет "единичных соседей", то рассматривают три элемента S(i-1, j-1), S(i-1, j), S(i-1, j+1), расположенные строкой выше, и элементу S(i, j) присваивается минимальная метка, принадлежащая одному из соседей. Чтобы не было ошибки, когда среди соседей встречаются нулевые элементы, им присваивается метка K из диапазона от 2 до Kmax. Поскольку значение K после присвоения увеличивается на единицу, единичные элементы соседей сверху будут иметь значение метки, меньше K. Если все соседи сверху - "нулевые элементы", им и, соответственно, S(i, j) будет присвоена очередная метка K, что говорит о предполагаемом обнаружении связной области.
Когда элемент S(i-1, j) = 0, а элементы S(i-1, j-1), S(i-1, j+1) и S(i, j) равны единице, они принадлежат к одной и той же области и должны быть помечены одной минимальной меткой из набора K-1, K, K+1, где K > K - 1 V K+1. Для этого просматривается массив с помеченными единичными элементами, и метка K-1 или K+1 заменяется на минимальную из них.
При наличии у элемента S(i, j) единичного соседа справа, удобнее каждый из единичных элементов строки i сравнивать со своим верхним левым соседом, присваивая им метки этих соседей, и лишь последний элемент сравнивать с тремя соседями. Если среди соседей сверху в процессе прослеживания серии единиц в строке i встречались нулевые элементы, то необходимы поиск минимального индекса и перемаркировка. Для этого метки серии заносятся в одномерный массив, в котором и ищется ее минимальное значение.
Основную информацию в изображении несут контуры-участки с резкими перепадами яркости, относительное число таких участков в обычных изображениях невелико 5 - 10% площади. Шаговое контурное разложение реализуется в соответствии с алгоритмом: если разлагающий элемент находится на черном, то очередной шаг делается налево, если на белом - то направо [6].
Синтезатор образов-изображений 53, процессор ЭВМ осуществляет программы [4]:
изменение внешнего вида объектов (в реальном времени),
изменение геометрических признаков (окна),
мгновенная идентификация объекта, указанного на экране с помощью сетки, сжатие данных,
устранение невидимых частей,
вычисление проекций текстур, разделение цветов, из которых состоят грани, независимо от освещения,
вычисление свойств диффузного и зеркального отражений для каждой грани,
вычисление видимости и невидимости, прозрачности и непрозрачности.
Признаки внешнего вида характеризуются последними тремя характеристиками.
Геометрические признаки выражаются триадой связанных с гранью векторов (U, V, N), которые в свою очередь выражены в координатах X, Y, Z, связанных с экраном. Наибольшее число граней ~ 4096.
Для включения в видеопрограмму монтажных переходов, заголовков изобразительной информации обеспечивается большой диапазон манипуляций и управления изображением: позволяют использовать фоны, изменять цвет, ракурс, размер изображения (величину плана) и взаимное расположение его отдельных частей, вращать изображение, получать эффект перспективы (как бы трехмерного пространства), зеркальное отображение.
Расширение возможностей создателей видеопрограмм осуществляется с помощью ввода блока знакогенератора 25 (ПЭВМ), у которого имеется процессор, дисковая память, электронные блоки ввода-вывода, изображение выводится на экран [5] . Знакогенератор преобразовывает типовые изобразительные формы - тайпофейсы, определяемые программным обеспечением, хранящимся в памяти знакогенератора. Тайпофейсы записаны на жестком магнитном диске. Размер знака изменяется в пределах от 4 до 400 телевизионных линий, затенение и раскрашивание изображений (16 млн. оттенков), 256 уровней прозрачности, переходы от страницы к странице в автоматическом режиме или от руки и другие манипуляции с изображением. В знакогенераторе 25 имеется встроенный блок формирования и выход основных или ключевых последовательностей сигналов буквенно-знаковой информации, редактирования текстов, манипуляция титров, ретуширование изображений; создаются цветные логотипы и готовые знаки, трехмерная анимация знаков в реальном времени при помощи джойстика, изменение размеров и позиционирование в пределах изображений в трехмерной перспективе. Символы анимации с множеством ключевых кадров, сложные наборы последовательностей знаков и трехмерной анимации окрашиваются с помощью палитры - встроенных источников создания теней и вращения их в любом направлении.
С блока 25 знакогенератора изображения через синтезатор образов 53 поступают на ЖК-экраны 9, на которых нанесены перекрестья в центре экрана.
В системе используются цифровые методы обработки сигналов, управление и контроль за работой узлов. Узлы телевизионной системы цифровые и выполнены на базе сверхбольших интегральных схем. Цифровой обработке подвергаются сигналы видео- и звуковой частоты, цифровые сигналы, прошедшие обработку, должны быть преобразованы в аналоговые и усилены для передачи на громкоговорители, модуляторы и отклоняющие системы ЖК экранов. Все цифровые устройства телевизионной системы видеосмесители 23 управляются микроЭВМ, расположенной в блоке управления, который выдает команды на цифровые процессоры. МикроЭВМ участвует также в выполнении функций авторегулировки телевизионной системы.
В видеопроцессоре сигналы яркости и цветности автоматически разделяются с помощью цифровой фильтрации, реализуемой схемами задержки, суммирования и умножения. Затем декодируется сигнал цветности и автоматически устанавливаются размахи сигналов, обеспечивающие сохранение опорных уровней белого и черного. Распознавание уровней сигналов и режимов ЖК экрана осуществляется с помощью микроЭВМ. Звуковой процессор в блоке 44 предназначен для выделения и формирования сигналов звукового сопровождения. В АЦП звукового блока обеспечивается 14-разрядное кодирование.
Блок нелинейного видеомонтажа 51 обеспечивает зрительный ряд для системы виртуальной реальности. В блоке 51 ЭВМ создает видеоэффекты - сложные композиции и анимации (движущиеся картинки). Блок 51 формирует линейные комбинации типа вырезания, вставки, вытеснения, наложения. Блок 51 обеспечивает единое время (кадров), смещение кадров от нескольких источников.
Для этого используется ряд контроллеров - анимационные управляющие платы. Они дают начало работы, синхронизацию, команды на захват кадра и пересылку в видеобуфер. Видеоконтроллер дает и обратные преобразования изображения в композиционный сигнал - режим реального времени.
Блок нелинейного монтажа 51 - система, в которой обеспечен произвольный доступ к исходному материалу [5]. В нелинейных системах для хранения видео- и аудиоматериала используется высокоскоростной магнитный или оптический диск большой емкости, обеспечивающий время доступа к любому кадру не более 12 мс. Время доступа практически не зависит от расположения этого кадра и общей длины сюжета или программы. Запись значительных объемов информации на магнитные диски производится с применением компрессии. Высокая скорость доступа дает возможность в процессе монтажа составлять последовательность чтения исходного материала при воспроизведении готовой программы. Эта последовательность представляет собой монтажный лист, по которому ЭВМ, являющаяся ядром нелинейной системы, определяет при воспроизведении, какой кадр какого плана воспроизводить в текущий момент времени, можно быстро осуществлять вставки в уже смонтированную последовательность, перестановки планов и многие другие операции. Блок 51, соединенный с несколькими видеоканалами блока видеосценариев 50, доступных для монтажа, имеет микшер для поиска с переменной скоростью.
Мгновенная автоматическая коммутация сигналов применяется для смены сюжетов телевизионной передачи переключением различных источников по заданной программе. Коммутаторы выполняются на электронных ячейках; управление переключением производится во время обратного хода кадровой развертки с помощью команд с ЭВМ. При создании спецэффектов используется мгновенная автоматическая коммутация сигнала во время активной части строки. Комбинированные изображения (обычно из 2 частей), например, спецэффекта "круг", на участке поля кадра в форме окружности воспроизводится изображение одного сюжета, а на остальной площади - изображение другого. Момент коммутации сигналов в каждой строке меняется по определенному закону в соответствии с изменением длительности и фазы специальных управляющих импульсов. Время коммутации - длительность 1 - 2 элементов изображения. Иначе граница между частями комбинированного изображения будет размыта. Отсутствие резких окантовок границ из-за нестационарных процессов, возникающих во время коммутации, осуществляется с помощью нейтрализации паразитных емкостей между коммутируемыми каналами и тем самым обеспечивается малое время переключения.
Плавная коммутация - микширование сигналов - смена сюжетов осуществляется наплывом - путем медленного вытеснения в течение нескольких секунд одного изображения другим.
Блок спецэффектов блок нелинейного монтажа 51 осуществляет комбинированное изображение, состоящее из двух составных частей с разными сюжетами от различных датчиков. Расположение, относительные размеры и конфигурация составляющих комбинированного изображения меняются автоматически или с помощью ручной регулировки. Комбинированные изображения (прямоугольные, треугольные, круглые и др.) формируются с помощью быстродействующего переключателя, коммутирующего ТВ-сигналы от двух датчиков во время активной части строки. Переключение сигналов производится импульсом с переменной длительностью, формирующимися в специальном генераторе. Длительность импульсов изменяется по определенному закону в соответствии с выбранной фигурой спецэффекта и ее изменением во времени.
Блок видеоэффектов основан на базе запоминающего устройства на кадр или на несколько кадров с предварительным преобразованием аналоговой формы ТВ-сигнала в цифровую с помощью АЦП. В запоминающее устройство записывается цифровой ТВ сигнал с тактовой частотой, определяемой строчной частотой сигнала записи. Генератор этих сигналов управляется синхронизирующими импульсами входного сигнала.
Информация считывается с запоминающего устройства (диска) с произвольной выборкой по закону, определяемому формой, частотой и фазой сигнала считывания. Последний формируется специальным генератором, управляющимся импульсами от синхрогенератора устройства, и обеспечивает соответствующий выбор последовательности адресов. В блоке 51 частоты генераторов записи и считывания взаимно связаны и кратны друг другу. Считанный ТВ-сигнал преобразуется в аналоговую форму в ЦАПе, смешивается с сигналом синхронизации и поступает на выход устройства. Передача неподвижного установленного изображения производится прекращением входного сигнала и считывается одно и то же изображение.
Цифровые методы обработки сигналов дают возможность организовать такие видеоэффекты, как остановленное изображение (стоп-кадр), электронное увеличение или уменьшение масштаба изображения, изменение формы изображения, переворот изображения (зеркальный эффект), формирование следов за объектами, движущимися в кадре, "размножение" изображений, формирование бесконечной галереи из первичного изображения, разделение первичного изображения на части и перемещение этих частей или всего сжатого изображения по кадру по любому закону, создание полиэкранных изображений из нескольких сжатых первичных изображений и др.
Кадровый синхронизатор (блок видеоэффектов) служит для воспроизведения ТВ-изображений несинхронных источников, т.е. выравнивания в реальном масштабе времени временных отношений между несинхронными ТВ-сигналами в интервале кадра, т.е. генераторы сигналов записи и считывания работают независимо друг от друга и управляются соответствующими сигналами синхронизации.
Корректоры временных искажений по существу является строчными синхронизаторами, работающими аналогично кадровым, и корректируют геометрию деталей, смещение группы строк, искривления вертикальных линий, дрожание участков.
Летчик надевает виртуальный шлем, перчатки, жилет, ботфорты, находится в кабине тренажера. Система работает следующим образом. По сигналу инструктора тренажера с пульта 58 летчик начинает режим "полета". Инструктор также снабжен виртуальным шлемом, если это парный полет. Взаимодействие инструктора с летчиком и воздействие на зрительный ряд видеосюжета осуществляются речевым воздействием. Инструктор задает с пульта 58 начальные условия H, V, Ψ, D, по карте нахождения аэродромов и ориентиров, погодные условия, последовательность режимов.
Летчик отрабатывает штурманские и пилотажные навыки по пилотированию. Пилотажный шлем как бы "угадывает" мысли летчика. Его глаза двигаются по изображению и "как и что" интересует его. Он накладывает взор - по углам и глубине видения - курсор на изображение и включает кнопку на ручке управления, появляется сегментация изображения. Инструктор видит эти сигналы и включает режим нелинейного монтажа и начинается поиск кадров, взаимодействуют блоки видеосценариев 50, ситезатор 53, знакогенератор 25, блок нелинейного монтажа 51. Выход в действительную реальность осуществляется инструктором и самим летчиком. Совмещение меток с перекрестиями и нажатие кнопок производит смену кадров изображений виртуальной реальности.
Восприятие летчиком различных объектов зависит от ряда факторов, и в частности, от положения наблюдателя относительно воспринимаемых объектов и выбираемой им точки (системы) отсчета. Так, человек, находящийся на Земле, видит воздушное судно движущимся в пространстве, в то время как при пребывании на борту воздушного судна он видит движение Земли, а себя и воздушное судно воспринимает неподвижными. Человеку свойственно всегда ориентироваться на Землю как на неподвижную систему отсчета, оценивая относительно ее свое движение и движение других объектов. Пилот, находясь в "отрыве" от Земли, воспринимает Землю подвижной, а кабину воздушного судна - неподвижной; в таком случае пилот практически управляет не воздушным судном, а пространством, что не соответствует действительности.
Пилот видит только часть пространства, т.е. часть Земли, неба и линии горизонта. Зона центрального видения, т.е. та часть пространства, которую видит человек, может смещаться при передвижении человека, наклонении туловища, повороте и наклоне головы, изменении направления взгляда.
В ряде случаев зрение подавляет сигналы от внутренних органов. Благодаря внутренним органам при передвижении человека, наклонах, перемещения зоны центрального видения человек видит окружающие его объекты с сохранением своей вертикали и воспринимает свое движение относительно неподвижных объектов (относительно неподвижной Земли), а не движение Земли и объектов относительно себя.
Литература:
1. Система виртуальной реальности VEX1. Forte Technologies.
2. Патент РФ N 2056646, G 09 B9/08, 06.06.91.
3. Джакония А. В., Гоголь А.А. и др. Телевидение. - М.: Радио и связь. 1986.
4. Мартинес Ф. Синтез изображений. - М.: Радио и связь, с. 159.
5. Кухарев С.Л. Нелинейная технология в видеопроизводстве. Техника кино и телевидения. 1993, N 12.
6. Писаревский А.Н., Чернявский А.Ф., Афанасьев Г.К. Системы технического зрения. - Л.: Машиностроение, 1988, с. 260.
7. Белогородский С.Л. Автоматизация управления посадкой самолета. - М.: Транспорт, 1972, с. 205.
8. Помыкаев И.Н., Селезнев В.И., Дмитроченко Л.А. Навигационые приборы и системы. - М.: Машиностроение, 1983.
9. Быков Р.Е., Сигалов В.М., Эйсенгарт Г.А. Телевидение. - Высшая школа, 1988.

Система имитации визуальной ориентировки летчика используется в авиационных тренажерах. Система имитации визуальной ориентировки летчика авиационного тренажера состоит из виртуального шлема с системой цветного стереоскопического изображения с жидкокристаллическими матрицами, полупрозрачными отражателями и видеосмесителями, системы стереофонического звучания с встроенным микрофоном и стереонаушниками, рецепторных устройств, установленных в перчатках, ботфортах (наколенниках), жилете (бронежилете), оборудованных датчиками перемещений, усилий и электроприводами, миниЭВМ отработки сигналов рецепторных устройств, кабины тренажера с креслом, приборной доски, органов управления, вычислителя динамики полета и вычислителя навигационной системы, пульта инструктора. В состав входят также система определения углов поворота головы оператора с фазочувствительным детектором, взглядоотметчик с телевизионной камерой и датчиками миганий, жидкокристаллические маски с блоком управления, блок видеосценариев, блок сегментации, блок нелинейного монтажа, знакогенератор, синтезатор образов, фотометрический блок, измеритель расстояния между зрачками глаз, измеритель углов поворота зрачков глаз, измеритель углов поворота взора. Повышается степень достоверности масштаба, глубины реальности имитации полета летательного аппарата при ручном визуальном управлении летчиком, улучшается качество и быстрота обучения летчиков. 3 ил.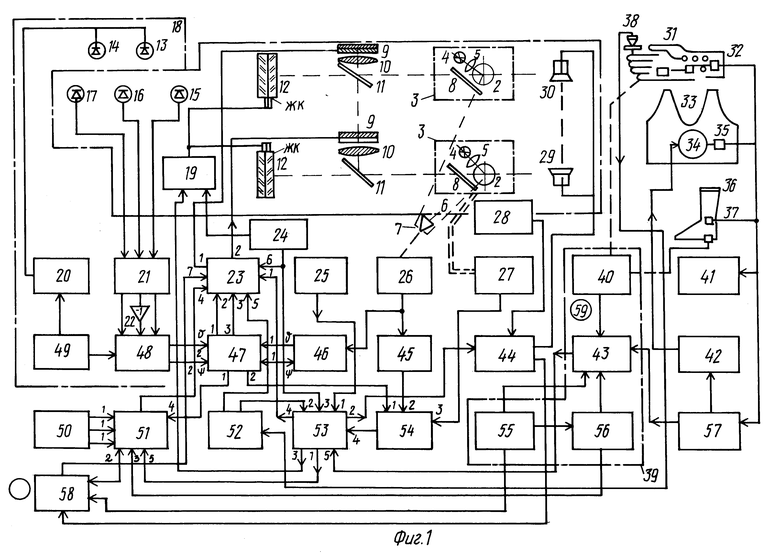
Система имитации визуальной ориентировки летчика, содержащая виртуальный шлем с системой цветного стереоскопического изображения с жидкокристаллическими матрицами, полупрозрачными отражателями и жидкокристаллическими масками, связанными с выходами видеосмесителя, стереофоническую систему с встроенным микрофоном и стереонаушниками, рецепторные устройства, установленные в перчатках, ботфортах, наколенниках, жилете или бронежилете, оборудованные датчиками перемещений, усилий и электроприводами и соединенные через платы расширения и контроллеры с мини-ЭВМ отработки сигналов рецепторных устройств, органы управления, соединенные с вычислителем динамики полета и вычислителем навигационной системы, пульт инструктора, систему определения углов поворота головы летчика с фазочувствительным детектором, взглядоотметчик с выходными зеркалами, телевизионную камеру, причем вычислитель динамики полета соединен с мини-ЭВМ обработки сигналов рецепторных устройств, отличающаяся тем, что в нее введены измеритель расстояния между зрачками глаз, измеритель углов поворота зрачков глаз, связанный с ним двумя входами измеритель углов поворота взора, датчик мигания, подключенный к входу блока управления жидкокристаллических масок, фотометрический блок,
блок видеосценариев, блок выбора телевизионного кадра, соединенный с кнопкой включения на ручке управления тренажера блок сегментации, видеосмеситель, знакогенератор, подключенный к выходам блока видеосценариев, к пульту инструктора, к выходу навигационного вычислителя, к первому выходу измерителя углов поворота взора, блок нелинейного монтажа, связанный первым входом с знакогенератором, вторым входом с блоком сегментации, третьим входом с фотометрическим блоком, четвертым входом с блоком выбора телевизионного кадра, пятым входом с вычислителем динамики полета, первым выходом с блоком нелинейного монтажа, вторым выходом со стереофонической системой, третьим выходом с блоком управления жидкокристаллических масок, синтезатор образов, при этом три входа блока выбора телевизионного кадра подключены соответственно к второму выходу измерителя углов поворота взора, к выходу измерителя расстояния между зрачками глаз, к выходу датчика мигания, семь входов видеосмесителя подключены соответственно к блоку синтезатора образов, вторым и третьим входами к двум выходам блока измерителя углов поворота взора, четвертым входом к блоку нелинейного монтажа, пятым, шестым и седьмым входами к блоку сегментации, фотометрическому блоку, к пульту инструктора, первый и второй выходы видеосмесителя подключены к жидкокристаллическим матрицам виртуального шлема, два входа измерителя углов поворота взора связаны с фазочувствительным детектором системы определения углов поворота головы летчика, вход телевизионной камеры через волоконные световоды с призмой оптически связан с выходными зеркалами взглядоотметчика, а выход телевизионной камеры подключен к входу измерителя углов поворота зрачков глаз и входу измерителя расстояния между зрачками глаз.
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| КОНСТРУКТИВНО ПОДДЕРЖИВАЕМАЯ ШИНА-ЭЛАСТИК С КАРКАСОМ СО СМЕЩЕННЫМ СЛОЕМ | 2001 |
|
RU2261804C2 |
| US 5388990, 14.02.95 | |||
| US 4743200, 10.05.88 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
