Изобретение относится к области устройств для метания стрел в спортивных состязаниях, на охоте и в монтажно-строительных работах для бросания бечевок, веревок, канатов и распиливающих ампул при проведении строительно-монтажных работ в труднодоступных и опасных местах.
Известен арбалет, содержащий два плеча (представляющие собой две плоские пружины), направляющее основание, тетиву, упорный кронштейн (иначе называемый «стремя»), приклад, прицельную планку, прицел, пружину, сенсор наличия стрелы, курок, защелку взводного устройства, предохранитель (см. описание рекурсивного арбалета. Патент на изобретение №2074350. http://bankpatentov.ru/node/175675).
Недостатки известного арбалета:
1. Низкий КПД преобразования потенциальной заряженной энергии в кинетическую.
2. Требуется приложение большой физической силы для взвода тетивы перед стрельбой.
3. Более сильная отдача при стрельбе и, как следствие, больше шума.
4. Большие затраты времени на взвод арбалета при помощи съемного механического блочного натяжителя, так как для того чтобы защелка взводного устройства арбалета вошла в контакт с еще не взведенной тетивой, необходимо 40 раз провернуть рукоять механического блочного натяжителя, а затем после этого начать взведение арбалета, для чего требуется такое же количество оборотов, но уже в обратную сторону.
5. Большое количество второстепенных ручных операций связанных с работой механического блочного натяжителя, к которым относятся защелкивание фиксаторов натяжителя на тетиве перед взводом, их выравнивание по месторасположению на тетиве, снятие фиксаторов после взвода с тетивы, постановка на предохранитель и снятие с предохранителя механизмов натяжителя, установка натяжителя на приклад и снятие его с приклада.
6. Сложность проведения холостого спуска тетивы с помощью механического натяжителя, так как выполнение холостого спуска путем нажатия на курок ведет к потере жесткости плеч и снижает их ресурс.
Наиболее близким к заявляемому изобретению является арбалет, содержащий два плеча, два блока-эксцентрика, закрепленных на плечах, направляющее основание, тетиву, упорный кронштейн, приклад, прицельную планку, прицел, пружину, сенсор наличия стрелы, курок, защелку взводного устройства, предохранитель (см. описание блочного арбалета. Патент на изобретение РФ 2358223. www.freepatent.ru/patents/2358223).
Недостатки известного арбалета:
1. Большие затраты времени на взвод арбалета при помощи съемного механического блочного натяжителя, так как для того чтобы защелка взводного устройства арбалета вошла в контакт с еще не взведенной тетивой, необходимо 40 раз провернуть рукоять механического блочного натяжителя, а затем после этого начать взведение арбалета, для чего требуется такое же количество оборотов, но уже в обратную сторону.
2. Большое количество второстепенных ручных операций, связанных с работой механического блочного натяжителя, к которым относятся защелкивание фиксаторов натяжителя на тетиве перед взводом, их выравнивание по месторасположению на тетиве, снятие фиксаторов после взвода с тетивы, постановка на предохранитель и снятие с предохранителя механизмов натяжителя, установка натяжителя на приклад и снятие его с приклада.
3. Сложность проведения холостого спуска тетивы с помощью механического натяжителя, так как выполнение холостого спуска путем нажатия на курок ведет к потере жесткости плеч и снижает их ресурс.
Указанные недостатки устранены в заявляемом изобретении, которое направлено на решение задачи снижения затрат времени на взвод арбалета при одновременном устранении второстепенных ручных операций, связанных с работой механического блочного натяжителя и обеспечения простой операции, связанной с проведением холостого спуска тетивы с помощью натяжителя.
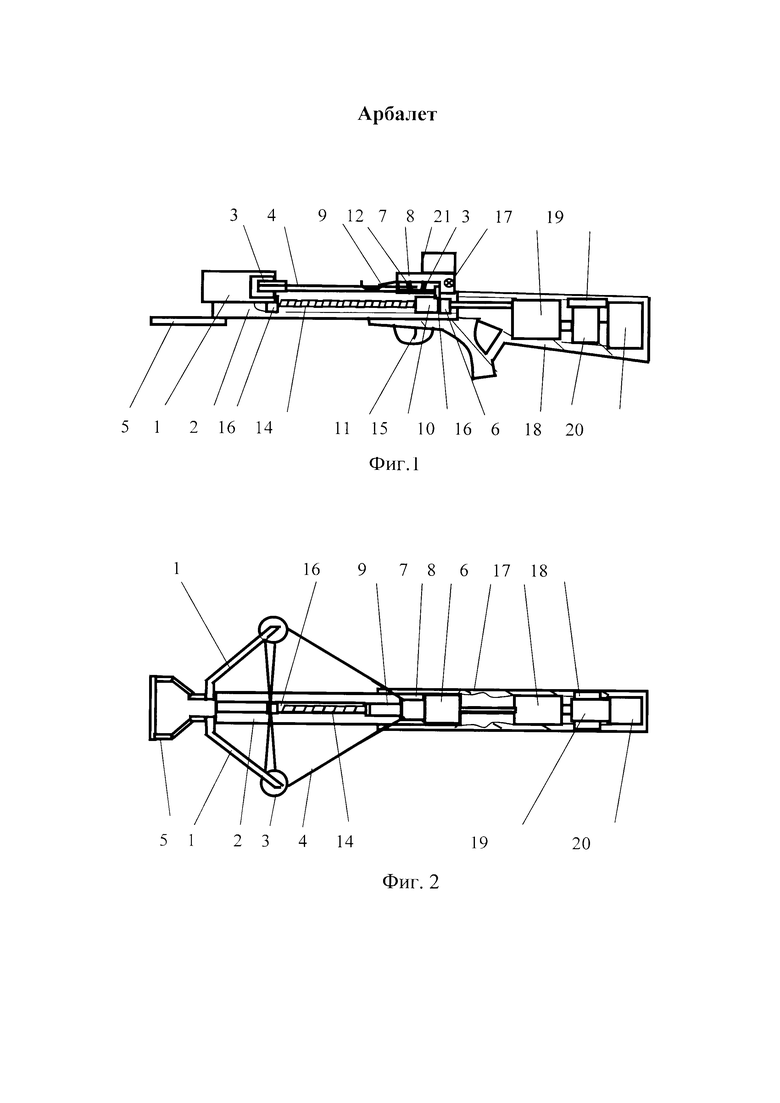
Указанная задача решается путем автоматизации процессов взвода арбалета при помощи электросилового устройства с сервоприводом и производства операций через пульт с программным управлением. Чертеж заявляемого арбалета с автоматизированным электрическим взводом показан при виде сбоку на фиг. 1, а при виде сверху - на фиг. 2, на которых позициями обозначены следующие элементы: 1 - плечи, 2 - направляющее основание, 3 - блоки-эксцентрики, 4 - тетива, 5 - упорный кронштейн, 6 - приклад, 7 - прицельная планка, 8 - прицел, 9 - пружина, 10 - сенсор наличия стрелы, 11 - курок, 12 - защелка взводного устройства, 13 - предохранитель, 14 - вал шариковой винтовой передачи, 15 - гайка шариковой винтовой передачи с датчиками скорости и момента движения, 16 - опора с подшипником и концевым выключателем, 17 - редуктор, 18 - электродвигатель, 19 - блок управления, 20 - источник электрического питания, 21 - фиксатор для тетивы.
Для удобства изображения плечи 1 показаны в несколько уменьшенном виде по отношению к прикладу 6, который вместе с находящимися в нем элементами показан в несколько увеличенном виде. Пистолетная рукоятка и выемка в прикладе под большой палец на фиг. 1 изображены, но позициями не обозначены, так как это элементы второстепенные. Тетива 4 показана на фиг. 1 и 2 во взведенном состоянии. На направляющем основании 2 и в прикладе 6 на фиг. 1 и 2 сделаны местные разрезы для показа находящихся в них элементов. Стрела и способ ее размещения на направляющем основании условно не показаны, так как они являются стандартными для всех видов современных арбалетов. Крепежные элементы: болты, винты гайки на фиг. 1 и 2 условно не показаны.
Назначение и конструктивное исполнение элементов следующее.
Плечи 1 (фиг. 1 и 2) представляют собой изделия из композитного материала, который имеет многослойную структуру на основе стекловолокна и карбона. Плечи предназначены для аккумулирования энергии механического усилия при взводе арбалета и последующей передачи через тетиву 4 этой энергии метаемой стреле. Направляющее основание 2 предназначено для крепления к нему всех элементов арбалета и для размещения на его верхней части в продольном разрезе стрелы для метания.
Блоки-эксцентрики 3 закреплены на плечах 1 и служат для размещения на них тетивы 4, а также для увеличения силы натяжения и придания стреле плавности приложения усилия. Тетива 4 служит для передачи аккумулированной при взводе механической энергии от плечей через блоки-эксцентрики 3 непосредственно к стреле. Тетива 4 закреплена своими концами на концах осей, на которых вращааются блоки-эксцентрики 3.
Упорный кронштейн 5, иначе еще называемый «стремя», крепится к направляющему основанию 2 и служит для постановки ноги при взводе арбалета. Упорный кронштейн 5 при метании стрел из положения лежа может быть повернут и служить опорой для переднего конца направляющего основания 2. Приклад 6 служит для упора арбалета в плечо человека при метании стрел и также используется в заявляемом изобретении для размещения в нем встроенных элементов электрического натяжителя, предназначеннного для автоматического взвода арбалета. К нижней части ложа приклада крепится скоба, прикрывающая курок 5. На фиг. 1 ложа и скоба условно позициями не обозначены.
Прицельная планка 7 крепится к направляющему основанию 2, имеет в нижней части небольшую прорезь, в которой перемещается тетива 4. К прицельной планке крепится пружина 9 для фиксации стрелы. В средней части основания прицельной планки размещены защелка 12 взводного устройства, предохранитель 13 и сенсор 10 наличия стрелы. Прицел 8 закреплен на верхней части прицельной планки 7 и служит для надежной ориентации арбалета при метании стрелы на цель. Пружина 9 прижимает тело стрелы в продольном углублении направляющего основания 2. Пружина свободно отгибается вверх при взводе тетивы 4. Сенсор 10 наличия стрелы контактного типа служит для предотвращения холостого спуска арбалета. Курок 11 служит для спуска тетивы 4 с защелки 12 взводного устройства. Защелка 12 взводного устройства удерживает тетиву 4 в натянутом положении до момента метания стрелы. Предохранитель 13 предотвращает метание стрелы при случайном нажатии на курок 11, а также предотвращает холостой спуск тетивы 4 без наличия стрелы.
В заявляемом изобретении вал 14 шариковой винтовой передачи является одним из основных новых отличительных элементов. Шариковая винтовая передача (сокращенно ШВП), применяемая в электрическом взводе натяжителя, имеет следующие преимущества перед другими видами передач (например, перед реечной, цепной, червячной, зубчатой, простой винтовой):
- высокая нагрузочная способность и высокая осевая жесткость;
- большая долговечность;
- плавность хода и надежность при работе на высоких скоростях;
- высокий коэффициент полезного действия (85-90%).
Указанные преимущества обеспечиваются за счет:
- замены трения скольжения трением качения;
- твердости рабочих поверхностей HRC 59-61;
- оптимального соотношения диаметра шарика, радиуса профиля резьбы и угла контакта и оптимального выбора типоразмера ШВП.
Конструктивно механическое усилие от вала 14 гайке 15 передается через шарики (на фиг. 1 и 2 не показаны). Шарики находятся частично в канавках вала 14 и частично в канавках гайки 15. Гайка 15 контактирует через шарикоподшипники (на фиг. 1 и 2 условно не показаны) с боковыми направляющими основания 2 и служит для передачи усилия через закрепленный на ней фиксатор 21 к тетиве при взводе арбалета. Гайка 15 имеет датчики скорости и момента движения (на фиг. 1 и 2 условно не показаны), которые связаны электрической связью с блоком управления 19. Это позволяет в автоматическом режиме контролировать силу натяжения тетивы при взводе и скорость ее перемещения относительно направляющего основания 2. С помощью пары вал 14 и гайка 15 вращательное движение вала 15 преобразуется в поступательное движение фиксатора 21 для тетивы.
Опоры 16 служат для размещения в подшипниках качения вала 14 и для крепления концевых электрических выключателей (на фиг. 1 и 2 условно не показаны). При достижении крайних положений гайкой 15 срабатывает один из концевых выключателей, посылается электрический сигнал на блок управления 19 и вращение двигателя 18 прекращается.
Редуктор 17 служит для снижения числа оборотов электродвигателя при одновременном увеличении крутящего момента на выходе, который преобразуется с помощью пары вал 14 и гайка 15 в механическое усилие, достаточное для натяжения тетивы 4 при взводе арбалета.
Электродвигатель 18 реверсивного типа с изменяемой скоростью и направлением вращения от блока управления 19 соединен механически через муфты (на фиг. 1 и 2 условно не показаны) с редуктором 17 и электрически соединен с блоком управления и источником электрического питания 20 постоянного тока и напряжением 12 В.
Блок управления 19 соединен электрической связью с электродвигателем 18, источником 20 электрического питания, с датчиками на гайке 15, концевыми выключателями на опорах 16, предохранителем 13 и сенсором 10 наличия стрелы, защелкой взводного устройства 12 и фиксатором 21. Блок управления 19 служит для выработки по запрограммированному варианту электрического сигнала для электродвигателя 18, предохранителя 13, защелки взводного устройства 12 и фиксатора 21. Операции выполняются с помощью кнопок на панели блока 19, находящейся около прицельной планки (на фиг.1 и 2 они условно не показаны). Источник электрического питания 12 В постоянного тока обеспечивает работоспособность электрической части арбалета. При недостаточности напряжения или его отсутствии арбалет работает в ручном режиме и с простым вариантом механического натяжения тетивы 4.
Заявляемое устройство работает следующим образом.
Для взвода арбалета нога вставляется в упорный кронштейн 5, создается упор ногой, арбалет устанавливается на предохранитель 13, на блоке 19 включается электропитание двигателя 19, по программе производится ускоренное перемещение гайки 15 к тетиве 4, производится автоматический захват тетивы с помощью фиксатора 21, находящегося на гайке, включается автоматически реверсивное вращение электродвигателя 18 с увеличенным крутящим моментом и тетива подтягивается до контакта с защелкой 12 взводного устройства. После фиксации тетивы 4 защелкой 12 фиксатор 21 от тетивы автоматически отстегивается, а электродвигатель 18 отключается. Затем стрела укладывается в продольный паз направляющего основания 2 до контакта с сенсором 10 при условии прижатия тела стрелы пружиной 9 к основанию 2. Производится наведение арбалета с помощью прицела 8 на цель, снятие с предохранителя 13 и при нажатии на курок осуществляется метание стрелы в цель. Затем все операции повторяются автоматически.
| название | год | авторы | номер документа |
|---|---|---|---|
| АРБАЛЕТ | 2001 |
|
RU2197697C2 |
| АРБАЛЕТ | 2008 |
|
RU2358223C1 |
| АРБАЛЕТ И СТРЕЛА ДЛЯ АРБАЛЕТА | 1991 |
|
RU2049976C1 |
| АРБАЛЕТ | 1999 |
|
RU2150650C1 |
| АРБАЛЕТ | 1994 |
|
RU2074350C1 |
| АРБАЛЕТ И КОНТЕЙНЕР ДЛЯ СТРЕЛ К НЕМУ | 2003 |
|
RU2239147C1 |
| ПОЛУАВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ) СИСТЕМЫ КОБЕЦ | 2002 |
|
RU2226251C2 |
| АРБАЛЕТ, СПУСКОВОЙ МЕХАНИЗМ АРБАЛЕТА И СПОСОБ РАБОТЫ СПУСКОВОГО МЕХАНИЗМА АРБАЛЕТА | 2017 |
|
RU2666050C1 |
| СПУСКОВОЙ МЕХАНИЗМ АРБАЛЕТА | 1994 |
|
RU2069297C1 |
| АРБАЛЕТ | 1992 |
|
RU2021572C1 |
Изобретение относится к области метания стрел, а именно к арбалетам. Арбалет содержит два плеча, два блока-эксцентрика, направляющее основание, тетиву, упорный кронштейн, приклад, прицельную планку, прицел, пружину, сенсор наличия стрелы, курок, защелку взводного устройства, предохранитель. Также имеются вал шариковой винтовой передачи и гайка шариковой винтовой передачи. На гайке шариковой винтовой передачи расположены датчики скорости и момента движения. Редуктор передает вращательное движение от реверсивного электродвигателя валу. Блок управления со встроенным программным обеспечением электрически связан с источником электрического питания с электродвигателем, с сенсором наличия стрелы, с защелкой взводного устройства, с предохранителем и фиксатором для тетивы. Достигается снижение времени взвода арбалета, а также повышение ресурса плеч арбалета. 2 ил.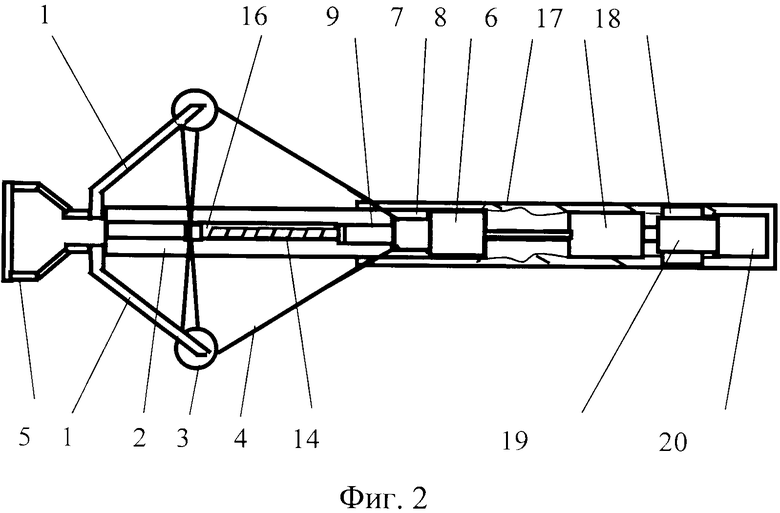
Арбалет, содержащий два плеча, два блока-эксцентрика, закрепленных на плечах, направляющее основание, тетиву, упорный кронштейн, приклад, прицельную планку, прицел, пружину, сенсор наличия стрелы, курок, защелку взводного устройства, предохранитель, отличающийся тем, что дополнительно имеются вал шариковой винтовой передачи, гайка шариковой винтовой передачи, перемещающаяся на шарикоподшипниках по направляющему основанию, с размещенными на ней фиксатором для тетивы, датчиками скорости и момента движения, связанная механически подвижно с валом через шарики и размещенная подвижно в опорах с подшипниками качения и имеющая концевые выключатели, редуктор, передающий вращательное движение от реверсивного электродвигателя валу, блок управления с встроенным программным обеспечением, электрически связанный с источником электрического питания с электродвигателем, с сенсором наличия стрелы, с защелкой взводного устройства, с предохранителем и фиксатором для тетивы.
| АРБАЛЕТ | 2008 |
|
RU2358223C1 |
| US 5220906 A, 22.06.1993 | |||
| US 8375928 B1, 19.02.2013 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

