Область техники, к которой относится изобретение
Варианты осуществления, описанные здесь, в общем, относятся к вычислительному устройству, и более конкретно, к носимому вычислительному устройству.
Уровень техники
Переносные вычислительные устройства используются различными средствами для управления различными типами приложений, где вычислительная мощность может быть использована для повышения эффективности приложения. В качестве примеров можно привести области применения, например, нескольких приложений в здравоохранении и при занятии фитнесом, которые могут использовать носимые вычислительные устройства.
Некоторые существующие носимые вычислительные устройства включают в себя очки, браслеты и смарт-часы. Иногда размер и/или форма устройства усложняют возможность ввода данных пользователем в носимое вычислительное устройство. В качестве примеров, смарт-часы и браслеты могут управляться с помощью сенсорных поверхностей на устройстве или кнопками.
Затруднительно управлять другими носимыми вычислительными устройствами (например, очками) с помощью кнопок. Пользователь может ввести данные в очки посредством колосовых команд, распознаванием движения руки перед очками или движения глаз.
Один класс носимых вычислительных устройств, значение использования которых в последнее время возрастает, относится к текстильным изделиям, которые включают в себя интегрированные электронные устройства. Эти носимые вычислительные устройства, как правило, требуют пользовательский интерфейс. В некоторых формах, сенсорная панель интегрирована в текстильное изделие для обеспечения приема команд ввода пользователя и/или данных изображения.
Одной из технических задач при использовании обычных систем с сенсорной панелью является необходимость наличия большого количества проводящих линий, которые каждая из них должна управляться собственным детектором. Кроме того, масштабирование таких сенсорных панелей к большему размеру означает увеличение количества проводящих линий и соответствующих детекторов.
Один из распространенных типов сенсорной панели относится к емкостной сенсорной панели. Емкостные сенсорные панели чувствительны к изменению диэлектрической константы в непосредственной близости от сенсорной панели. Емкостные сенсорные панели могут быть инкорпорированы в носимые вычислительные устройства, которые интегрированы с текстильным изделием, предназначенным для ношения на теле.
Одним из недостатков инкорпорирования емкостных сенсорных панелей в текстильные изделия, предназначенные для ношения на теле, является наличие постоянной интенсивной шумовой помехи, вызванной емкостным взаимодействием с телом человека, который использует носимое вычислительное устройство. Эта сильная шумовая помеха из-за емкостного взаимодействия с телом может негативно сказаться на функционировании носимого вычислительного устройства.
Краткое описание чертежей
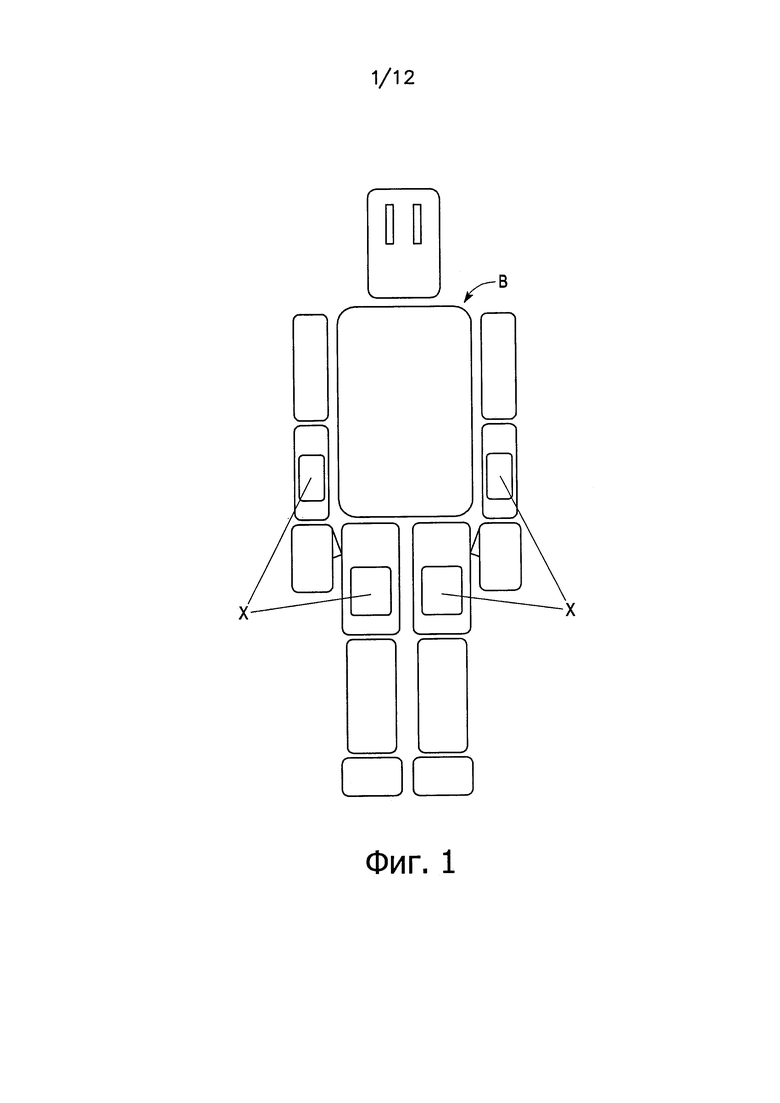
Фиг. 1 представляет собой схематический вид, иллюстрирующий пример мест, где носимые вычислительные устройства могут быть размещены на теле человека.
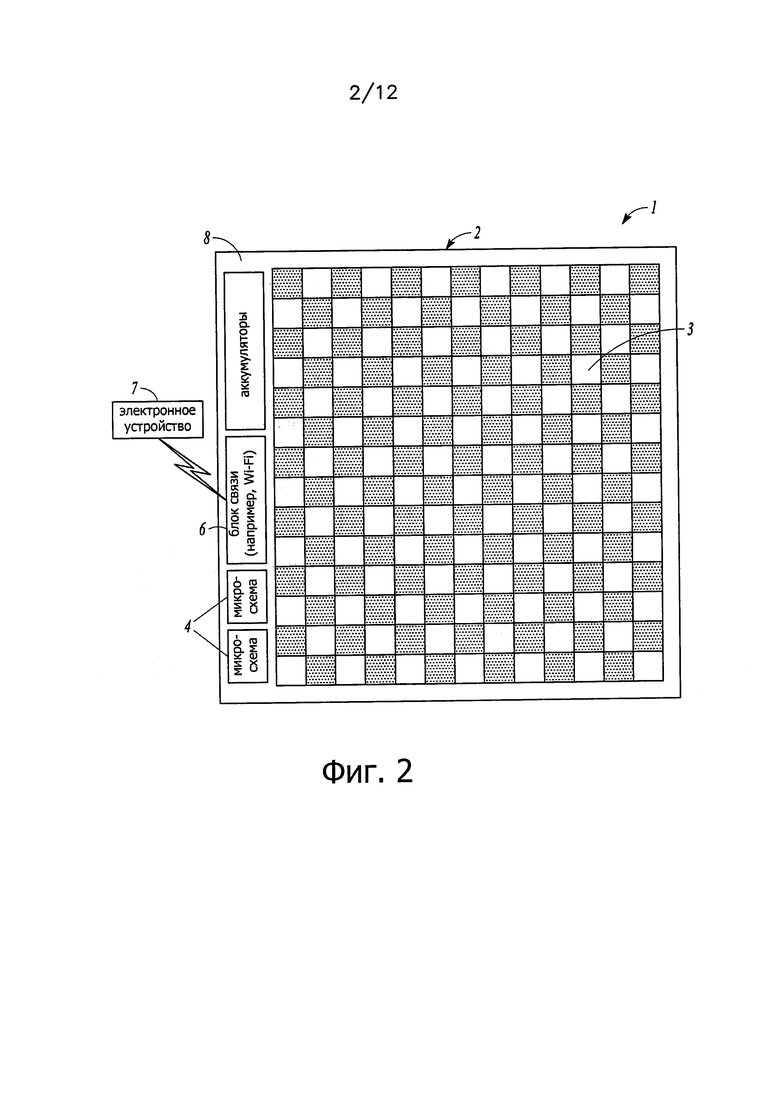
Фиг. 2 представляет собой вид сверху примерного носимого вычислительного устройства, которое включает в себя сенсорную панель, имеющую граничную область.
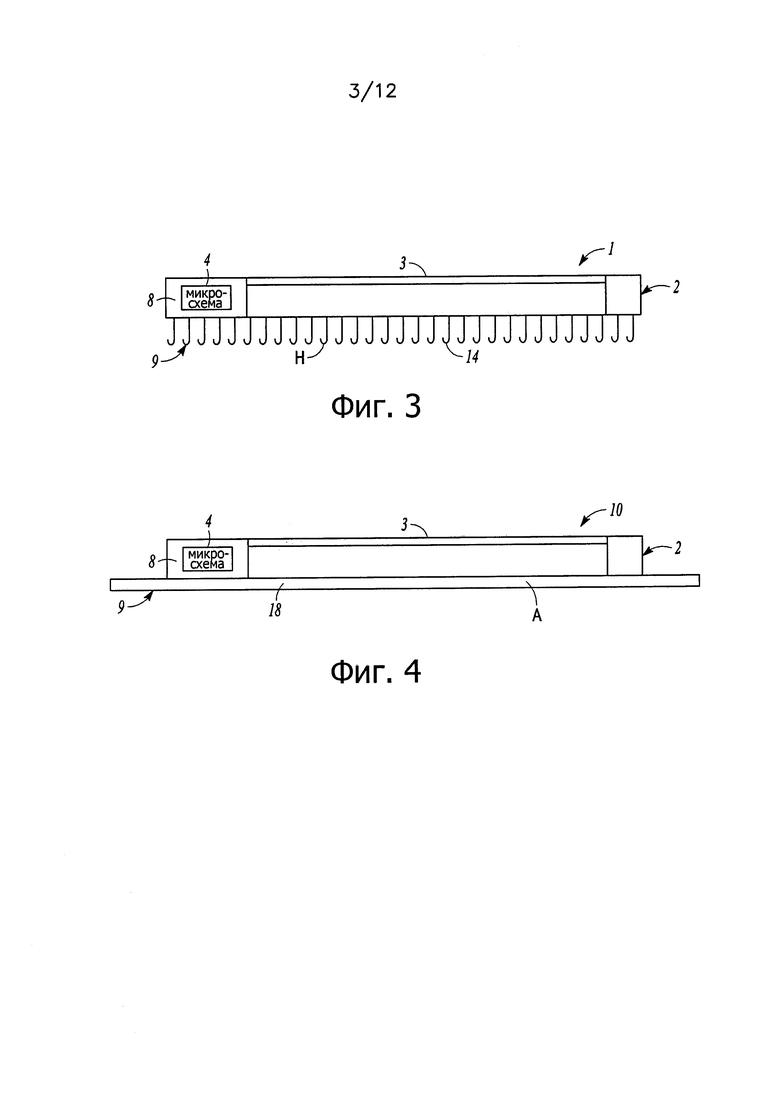
Фиг. 3 показывает носимое вычислительное устройство, показанное на фиг. 2, где носимое вычислительное устройство включает в себя систему крепления Велькро.
Фиг. 4 показывает носимое вычислительное устройство, показанное на фиг. 2, где носимое вычислительное устройство включает в себя адгезионное покрытие.
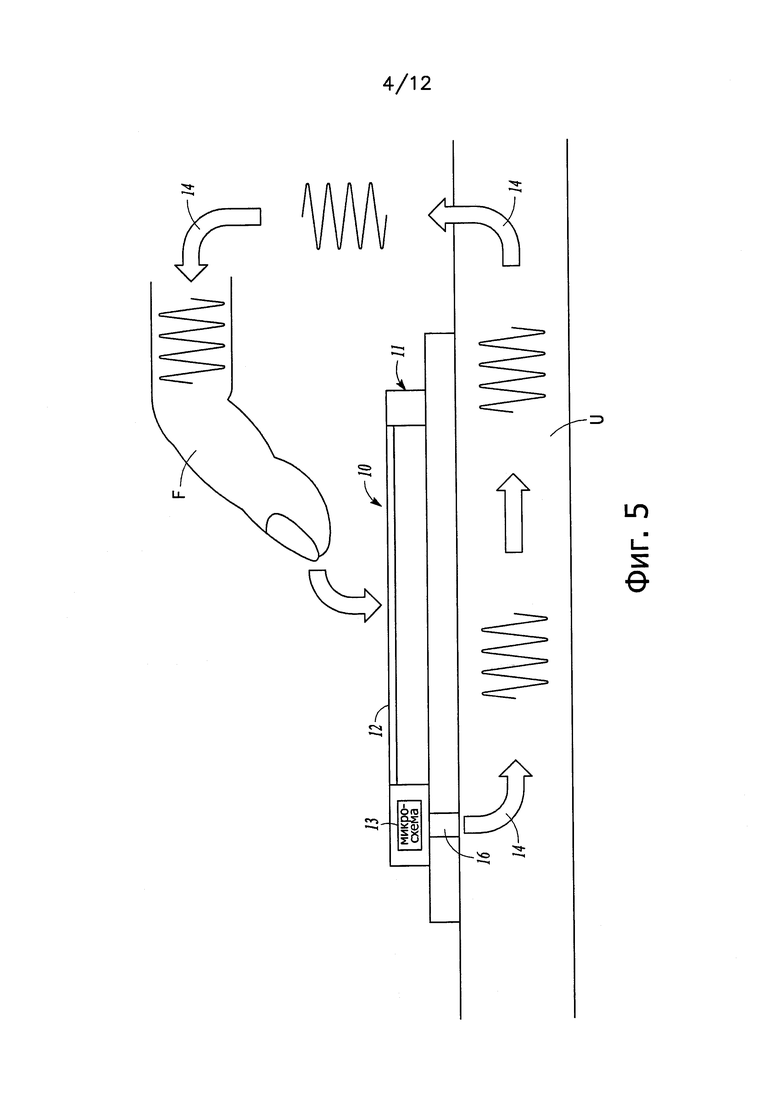
Фиг. 5 иллюстрирует схематический вид сбоку примера персонализированного носимого вычислительного устройства.
Фиг. 6-8 показывают другой пример носимого вычислительного устройства, которое включает в себя линии передачи, которые интегрированы в сенсорную панель.
Фиг. 9-10 показывают другой пример носимого вычислительного устройства, которое включает в себя оптические волокна, интегрированные в сенсорную панель.
Фиг. 11-13 показывают последовательность объединения оптических волокон, показанные на фиг. 9-10 для пропускания света между оптическими волокнами.
Фиг. 14 иллюстрирует другой пример носимого вычислительного устройства, которое включает в себя сенсорную панель.
Фиг. 15 показывает блок-схему электронного устройства, которое включает в себя электронные схемы и/или электронные блоки, описанные здесь.
Описание вариантов осуществления
Последующее описание и чертежи в достаточной степени иллюстрируют конкретные варианты осуществления для предоставления возможности специалистам в данной области реализовать их на практике. Другие варианты осуществления могут использовать структурные, логические, электрические изменения, иные процессы и другие изменения. Части и признаки некоторых вариантов осуществления могут быть включены в состав или замещены теми же из других вариантов осуществления. Варианты осуществления, изложенные в формуле изобретения, охватывают все доступные эквиваленты этих пунктов формулы изобретения.
Терминология ориентации, например, "горизонтальный", как используется в данной заявке, определяется по отношению к плоскости, параллельной обычной плоскости или поверхности пластины или подложки, независимо от ориентации пластины или подложки. Термин "вертикальный" относится к направлению, перпендикулярному к горизонтали, как определено выше. Предлоги, такие как "на", "сторона" (например, "боковой"), "выше", "ниже", "над" и "под" определяются по отношению к обычно применяемой плоскости или поверхности, будучи на верхней поверхности пластины или подложки, независимо от ориентации пластины или подложки.
Фиг. 1 представляет собой схематическое изображение, иллюстрирующее пример мест X, где носимое вычислительное устройство может быть установлено на человеческом теле В. Далее приведено описание нескольких примеров носимых вычислительных устройств, которые включают в себя "сенсорную панель", в качестве интерфейса. В некоторых формах, примерные носимые вычислительные устройства могут быть интегрированы с (или прикреплены к) текстильными изделиями (т.е. одеждой). В других формах, примерные носимые вычислительные устройства могут быть закреплены непосредственно на теле человека (то есть, по аналогии с повязкой), который использует любое примерное носимое вычислительное устройство.
Описанное здесь примерное носимое вычислительное устройство включают в себя гибкую сенсорную панель, которая может позволить пользователю носимого вычислительного устройства более легко управлять носимым вычислительным устройством. В качестве примера, гибкая сенсорная панель может включать в себя указатель, который может быть перемещен, или элементы так, что на элементы можно "кликнуть" дискретным способом (например, способом, аналогичным как это делается при использовании ноутбуков и смартфонов).
Примерные носимые вычислительные устройства, описанные здесь, могут включать в себя различные электронные компоненты. Некоторые примеры включают в себя блок питания и/или устройства связи среди других видов электронных компонентов.
Кроме того, пользователь может иметь возможность более легко управлять носимым вычислительным устройством, которое включает в себя гибкую сенсорную панель, исключая необходимость в использовании суетливых движений пальца или проговаривания голосовых команд, тем самым сохраняя конфиденциальность использования устройства пользователей. Устранение необходимости в использовании суетливых движений пальца или проговаривания голосовых команд является особенно важным фактором при пользовании онлайн-банкинга или набора пароля приложений.
Одним из недостатков существующих систем является наличие вероятности неточного ввода данных пользователем, вызванное неправильной интерпретацией системой голосовых команд из-за наличия фонового шума. Еще одним из недостатков существующих систем является наличие вероятности нежелательного ввода данных, который вызывается движением вблизи системы. В качестве примера, движение вблизи системы может вызвано нежелательным и/или неверно интерпретированным анализом жеста ввода.
Фиг. 2 представляет собой вид сверху примерного носимого вычислительного устройства 1, которое включает в себя гибкую подложку 2, выполненную с возможностью ношения пользователем примерного носимого вычислительного устройства 1. Примерное носимое вычислительное устройство 1 дополнительно включает в себя гибкую сенсорную панель 3, установленную на гибкой подложке 2.
В настоящем описании "гибкая" относится к способности гибкой сенсорной панели 3 и гибкой подложки 2 сгибаться. Величина изгиба будет определяться частично в зависимости от варианта применения, где любое из примерных носимых вычислительных устройств 1, 10, 20, 30, 40, описанные здесь, будут использоваться. В качестве примера, величина изгиба может отличаться в случае, когда примерные носимые вычислительные устройства, описанные здесь, интегрированы с (или разъемно соединены с) текстильным изделием (т.е. одеждой), в отличие от случая, когда примерные носимые вычислительные устройства, описанные здесь, прикреплены непосредственно к телу человека, который использует любое из примерных носимых вычислительных устройств 1, 10, 20, 30, 40.
Примерное носимое вычислительное устройство 1 дополнительно включает в себя интегральную схему(ы) 4, установленную на гибкой подложке 2. Интегральная схема 4 интерпретирует контакт с гибкой сенсорной панелью 3.
Тип интегральной схемы 4, которые включены в состав примерного носимого вычислительного устройства 1, будет частично зависеть от операций, которые выполнят примерное носимое вычислительное устройство 1. Следует отметить, что интегральная схема 4 может представлять собой любой тип интегральной схемы, известной сейчас или разработанной в будущем.
Примерное носимое вычислительное устройство 1 дополнительно включает в себя приемопередатчик 6, установленный на гибкой подложке 2. Приемопередатчик 6 передает и принимает радиосигналы в и от отдельного электронного устройства 7 (например, посредством Bluetooth, Zigbee и т.д.).
Пользователь также может носить отдельное электронное устройство 7 (например, очки или источник питания) или использовать его, будучи не закрепленным на теле пользователя. В некоторых формах, отдельное электронное устройство 7 может примыкать к гибкой сенсорной панели 3, может быть закреплено под гибкой сенсорной панелью 3 или на другом месте, на или вне тела в зависимости от формы примерного носимого вычислительного устройства 1.
Импликация отдельного электронного устройства 7 может обеспечить носимому вычислительному устройству 1, которое включает в себя гибкую подложку 2 и гибкую сенсорную панель 3, более легкий способ (i) конфигурирования в текстильном изделии, которые инкорпорированы в одежду; (ii), конфигурирования с возможностью разъемного прикрепления к одежде, которую носит пользователь; и/или (iii) конфигурирования с возможностью съемного прикрепления непосредственно на тело пользователя.
В примерном носимом вычислительном устройстве 1, показанном на фиг. 2, гибкая сенсорная панель 3 включает в себя граничную область 8. Интегральная схема 4 и приемопередатчик 6 могут находиться в граничной области 8 гибкой сенсорной панели 3.
Как показано на фиг. 3, примерное носимое вычислительное устройство 1 может дополнительно включать в себя съемное приспособление 9 для избирательного крепления носимого вычислительного устройства 1 на теле пользователя. Фиг. 3 показывает носимое вычислительное устройство 1, показанное на фиг. 2, где съемное приспособление 9 включает в себя систему Н крепления крючок-петля. Фиг. 4 показывает носимое вычислительное устройство 1, показанное на фиг. 2, где съемное приспособление 9 содержит адгезивное покрытие А, так что носимое вычислительное устройство 1 может быть съемно закреплено на теле пользователя или одежде с помощью адгезивного покрытия А.
Фиг. 5 иллюстрирует схематический вид сбоку примерного носимого вычислительного устройства 10, где пользователь вводит данные в носимое вычислительное устройство 10, которое может быть персонализированным. Носимое вычислительное устройство 10 включает в себя гибкую подложку 11, которое выполнено с возможностью ношения пользователем U, который носит носимое вычислительное устройство 10.
Носимое вычислительное устройство 10 включает в себя гибкую сенсорную панель 12, которая крепится к гибкой подложке 11, и интегральную схему 13, установленную на гибкой подложке 11. Интегральная схема 13 обнаруживает контакт с гибкой сенсорной панелью 12, когда контакт выполнен только пользователем U, который носит носимое вычислительное устройство 10, но не другими пользователями.
В некоторых формах, интегральная схема 13 определяет, что контакт производится только пользователем U, который носит носимое вычислительное устройство, но не другие пользователи, посредством посылки электрического сигнала 14 через кожу пользователя. Гибкая сенсорная панель 12 распознает только контакт с гибкой сенсорной панелью 12, только тогда, когда контакт пропускает электрический сигнал 14 к гибкой сенсорной панели 12. В качестве примера, интегральная схема 13 может послать электрический сигнал 14 через кожу пользователя в палец F пользователя.
Следует отметить, что интегральная схема 13 может генерировать любой тип электрического сигнала 14, который может быть пригоден для персонализации контакта пользователя с гибкой сенсорной панелью 12. В качестве примера, электрический сигнал 14 может быть послан на назначенной частоте запуска. Если кожный покров человека, который использует данное устройство, прикасается к носимому вычислительному устройству 10, то носимое вычислительное устройство 10 может распознать частоту запуска и распознать контакт как сигнал ввода в носимое вычислительное устройство 10.
Таким образом, если неавторизованный пользователь вводит данные в носимое вычислительное устройство 10 на неверной частоте запуска, то носимое вычислительное устройство 10 может игнорировать ввод данных. Наличие индивидуальной частоты запуска может обеспечить нежелательный ввод данных от других людей, случайно контактирующих с носимым вычислительным устройством 10.
В некоторых случаях, низковольтный сигнал частоты запуска из носимого вычислительного устройства 10 может передаваться через контакт 16 (например, контакт или иглу) на носимом вычислительном устройстве 10 к коже тела авторизованного пользователя U. Наличие необходимости применения соответствующей частоты запуска при контакте с носимым вычислительным устройством 10, может предотвратить нежелательный ввод данных в носимое вычислительное устройство 10, особенно когда авторизованный пользователь использует носимое вычислительное устройство 10 в оживленных местах, таких как автобусы, поезда и т.д.
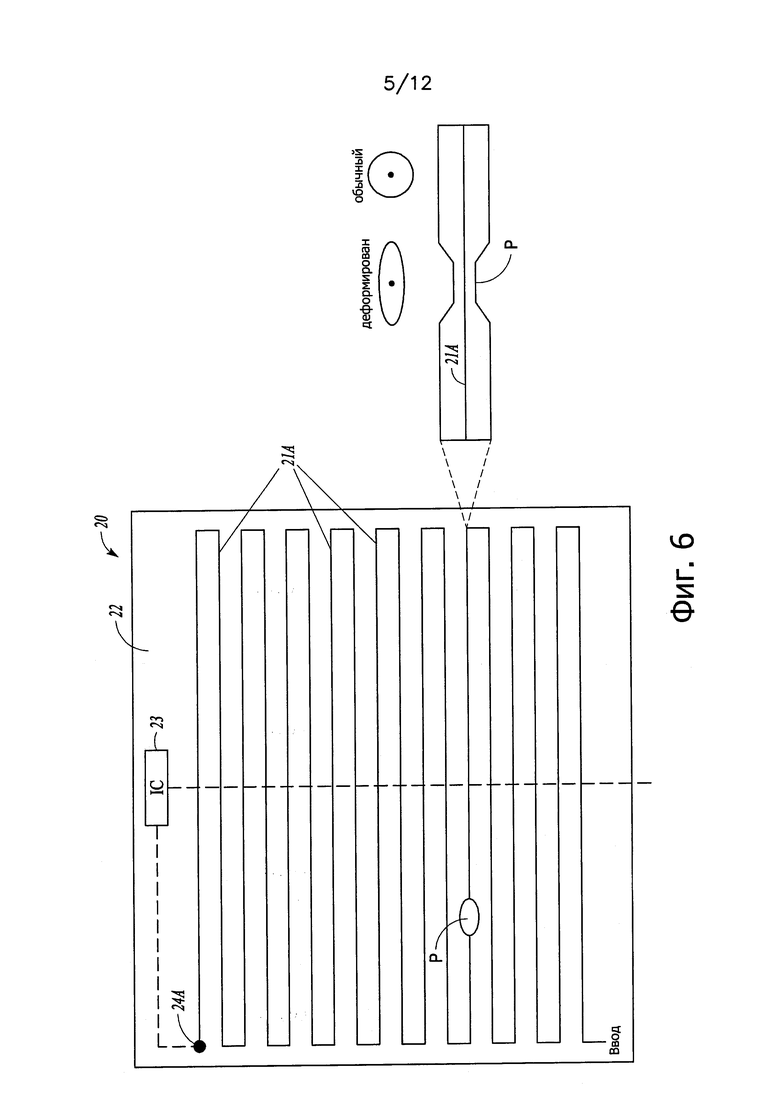
Фиг. 6 показывает еще один пример носимого вычислительного устройства 20, которое включает в себя гибкую линию 21А передачи, которая интегрирована в гибкую сенсорную панель 22. Гибкая сенсорная панель 22 выполнена с возможностью ношения пользователем. Носимое вычислительное устройство 20 дополнительно включает в себя первый детектор 24А на конце гибкой линии 21А передачи.
Носимое вычислительное устройство 20 дополнительно включает в себя интегральную схему 23, установленную на гибкой сенсорной панели 22. Интегральная схема 23 распознает контакт с гибкой сенсорной панелью 22 путем посылки первого электрического сигнала по первой линии 21А передачи и определением величины локализованного изменения импеданса в первой линии 21А передачи, используя рефлектометрию с временным разрешением (в качестве примера). Прикосновение и деформация линии 21А передачи (например, в точке Р) приводит к локальному изменению величины сопротивления линии.
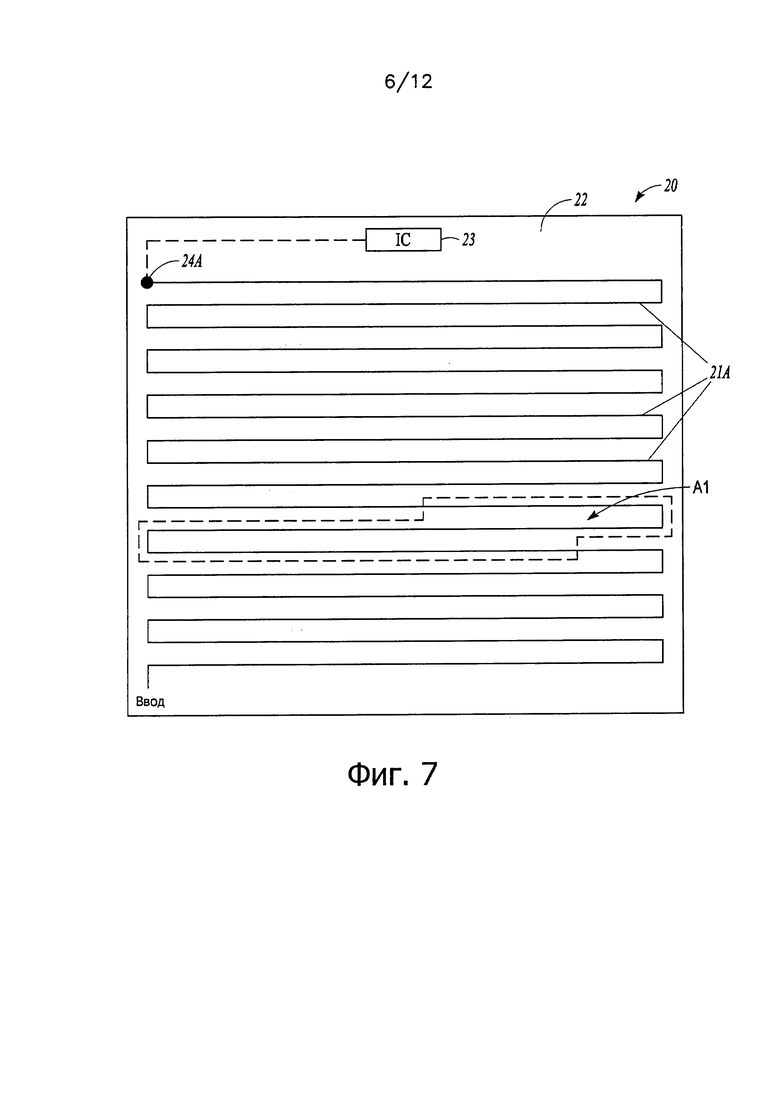
Извилистая структура линии 21А передачи на гибкой сенсорной панели 22 может предоставить возможность определения частичной локализации. Как показано на фиг. 7, частичная локализация, обеспечиваемая с помощью линии 21А передачи, может быть определена в пределах области А1.
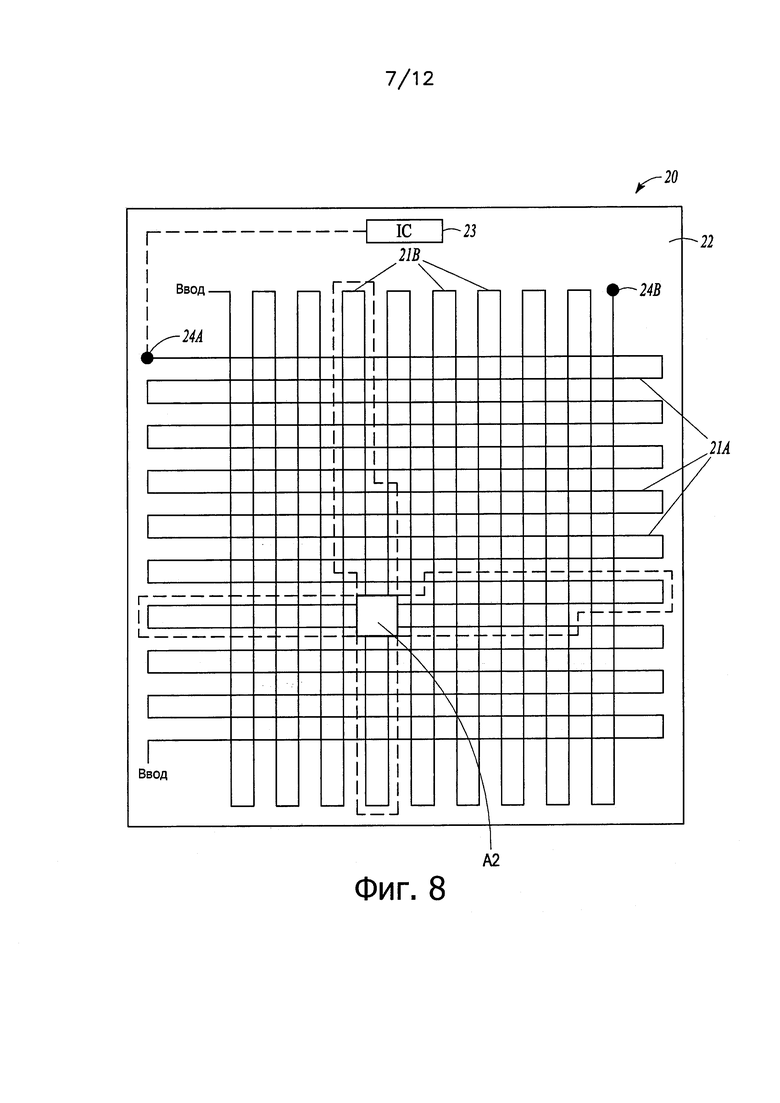
Как показано на фиг. 8, гибкая сенсорная панель 22 может дополнительно включать в себя вторую гибкую линию 21В передачи. Интегральная схема 23 интерпретирует контакт с гибкой сенсорной панелью 22 путем посылки второго электрического сигнала через вторую линию 21В передачи и определением величины локализованного изменения импеданса на второй линии 21В передачи, используя рефлектометрию с временным разрешением (в качестве примера). Носимое вычислительное устройство 20 дополнительно включает в себя второй детектор 24В на конце второй гибкой линии 21В передачи.
Объединение информации от двух перекрывающихся линий 21А, 21В передачи может позволить обеспечить более точное определение локализации контакта. Извилистая структура линий 21А, 21В передачи назад и вперед из стороны в сторону на гибкой сенсорной панели 22 может позволить обеспечить дополнительную точность определения места контакта. В качестве примера, посредством объединения информации из линий 21А, 21В передачи, область локализации контакта может быть дополнительно сужена до области А2.
В примере формы, изображенной на фиг. 8, вторая линия 21В передачи ориентирована перпендикулярно к линии 21А передачи на каждой из множества точек, где первая и вторая линии 21А, 21В передачи пересекаются. Следует отметить, что в других формах, линии 21А, 21В передачи могут пересекаться под другими углами.
Одним из потенциальных преимуществ носимого вычислительного устройства 20 является то, что число детекторов не увеличивается при увеличении размера сенсорной панели 22. В качестве примера, для функционирования носимого вычислительного устройства 20 может потребоваться только два детектора 24А, 24В вместо многочисленных детекторов, которые необходимы для обеспечения работы обычных сенсорных панелей. Таким образом, гибкая сенсорная панель 22 предоставляет возможность использования широкого диапазона размеров гибкой сенсорной панели 22 в носимом вычислительном устройстве 20.
Кроме того, если носимое вычислительное устройство 20 интегрировано в одежду, то отсутствует шумовая помеха, которая возникает из-за емкостной связи с телом человека, носящего носимое вычислительное устройство 20. Отсутствие емкостной связи может улучшить функциональные характеристики носимого вычислительного устройства 20.
В некоторых формах носимого вычислительного устройства 20, линии 21А, 21В передачи являются коаксиальными линиями или скрученной парой линий, интегрированные в гибкую сенсорную панель 22. Расположение каждой из линий 21А, 21В передачи может покрыть всю область сенсорной панели 22 (например, зигзагообразно, как показано на фиг. 8).
Как описано выше, касание и деформация каждой из линий 21А, 21В передачи приводит к локальному изменению величины импеданса каждой линии 21А, 21В передачи. В некоторых формах, радиочастотные импульсы поступают в соответствующие линии 21А, 21В передачи. Соответствующие радиочастотные импульсы отражаются посредством неоднородности сопротивления, созданной прикосновением и деформированием.
Позиция деформации вдоль каждой линии передачи может быть рассчитана с помощью момента времени между исходным и отраженным импульсом (например, используя рефлектометрию с временным разрешением). Кроме того, первый и второй детекторы 24А, 24В могут быть использованы для каждой соответствующей линии 21А, 21В передачи, чтобы обнаружить позицию деформации вдоль каждой линии 21А, 21В передачи.
Разрешение носимого вычислительного устройства 20 может частично зависеть от того, насколько точно измерена величина задержки между распространяющимся и отраженным импульсом. Разрешение не зависит от абсолютной длины линий 21А, 21В передачи, предоставляет возможность носимым вычислительным устройствам 20 легко масштабировать длины линий передачи в более длинные линии и, соответственно, увеличивать размер области гибкой сенсорной панели 22.
Фиг. 9 показывает альтернативную форму носимого вычислительного устройства 30, которое включает в себя гибкую сенсорную панель 30, выполненную с возможностью ношения пользователем.
По сравнению с носимых вычислительным устройством 20, две линии 21а, 21В передачи могут быть заменены первым и вторым оптическим волокном 31А, 31В. Носимое вычислительное устройство 30 дополнительно включает в себя первый детектор 33А на конце первого оптического волокна 31А и второй детектор 33В на конце второго оптического волокна 31В.
Носимое вычислительное устройство 30 дополнительно включает в себя интегральную схему 34, установленную на гибкой сенсорной панели 32. Интегральная схема 34 интерпретирует контакт с гибкой сенсорной панелью 32 путем посылки излучения через первое и второе оптическое волокно 31А, 31В к соответствующему первому и второму детекторам 33А, 33В. Излучение распространяется между первым и вторым оптическим волокном 31А, 31В, когда первое и второе оптические волокна 31А, 31В, прижимаются близко друг к другу из-за контакта с гибкой сенсорной панелью 32. Расположение контакта с гибкой сенсорной панелью 32 определяется на основании анализа времени распространения излучения через первое и второе оптические волокна 31А, 31В к соответствующим первому и второму детекторам 33А, 33В.
Когда два оптических волокна 31А, 31В прижаты друг к другу, излучение (т.е., электромагнитное излучение, свет, видимый свет, инфракрасный свет) может распространяться между двумя оптическими волокнами 31А, 31В. Расположение контакта (т.е. приложенное давление) с сенсорной панелью 32 может быть получено путем анализа времени распространения сигнала.
В примере формы, показанной на фиг. 9, два оптических волокна 31А, 31В имеют детекторы 33А, 33В на каждом соответствующем конце. Два оптических волокна 31А, 31В сконфигурированы таким образом, что позволяет свету распространяться между двумя оптическими волокнами 31А, 31В, когда два оптических волокна 31А, 31В прижаты друг к другу (т.е. из-за контакта с гибкой сенсорной панелью).
В некоторых формах, первое оптическое волокно 31А извивается вперед и назад из стороны в сторону по гибкой сенсорной панели 32 без пересечения. Кроме того, второе оптическое волокно 31В извивается вперед и обратно из стороны в сторону по гибкой сенсорной панели 32 без пересечения. Первое оптическое волокно 31А и второе оптическое волокно 31В пересекаются в нескольких местах.
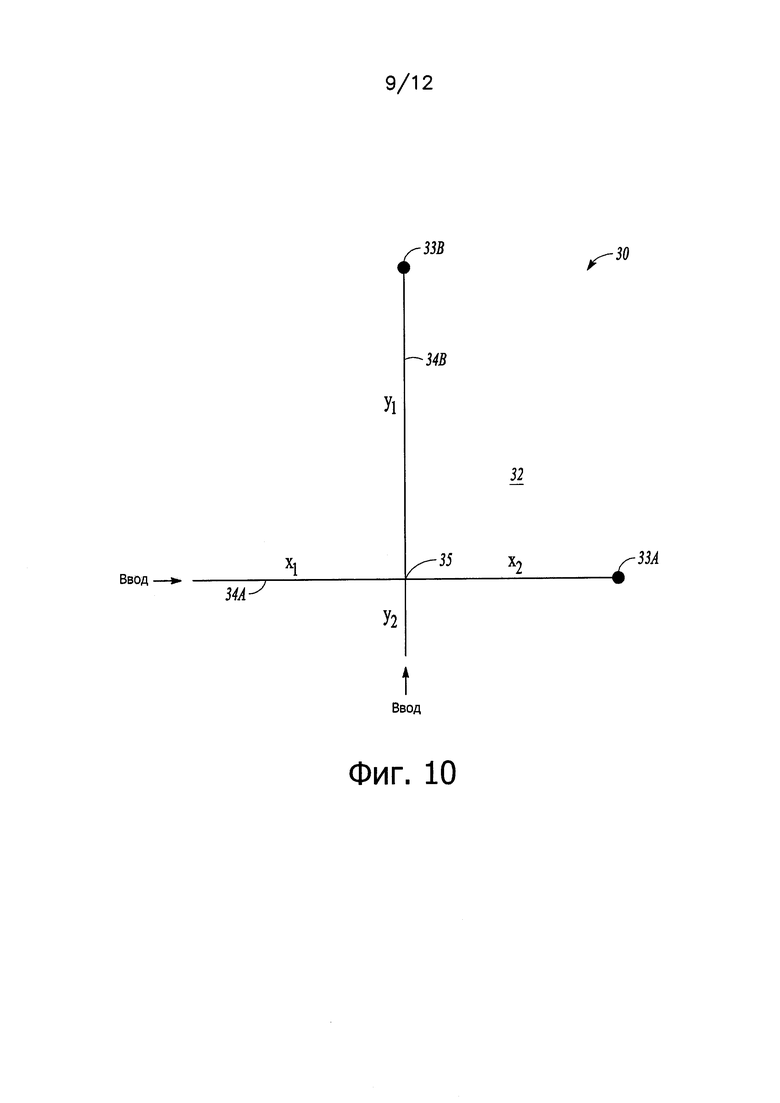
Принцип определения позиции при использовании излучения (т.е. света), распространяющегося между двумя оптическими волокнами 31А, 31В, будет теперь описан со ссылкой на фиг. 10. Два извилистых оптических волокна 31А, 31В были заменены на прямые оптические волокна 34А, 34В только с одним пересечением 35.
При измерении времени распространения от точек ввода до детекторов 33А, 33В учитываются расстояния x1+y1, х2+y2, x1+х2+y1 и y2. На основании этих определенных расстояний x1, х2, y1, y2 может быть вычислена и установлена позиция пересечения 35.
Время распространения излучения может быть определено путем измерения периода времени, необходимого для (i) прохождения первого излучения через первое оптическое волокно 34А на второй детектор 33В после распространения излучения из первого оптического волокна 34А во второе оптическое волокно 34В; и (ii) прохождения второго излучения через второе оптическое волокно 34В в первый детектор 33А после распространения излучения из второго оптического волокна 34В в первое оптическое волокно 34А. В некоторых формах, первое излучение осуществляется на другой частоте, чем второе излучение.
Следует отметить, что в случае нескольких пересечений извилистых оптических волокон 31А, 31В, импульс подается в одно оптическое волокно (например, оптическое волокно 31А), что приводит к возникновению нескольких импульсов, поступающих на детектор 33В другого оптического волокна (например, оптическое волокно 31В). Каждый импульс, принятый детектором 33В, соответствует пересечению, и может быть проанализирован, как описано выше.
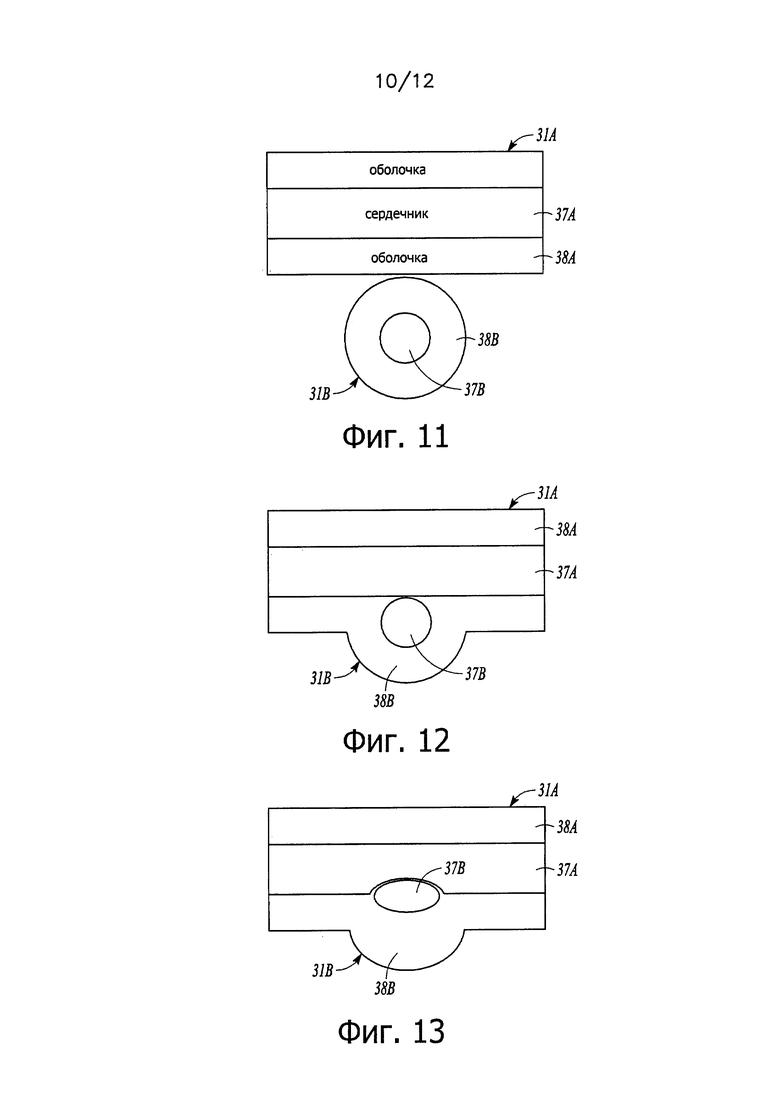
Фиг. 11-13 показывают последовательность объединения оптических волокон 31А, 31В, показанные на фиг. 9, для пропускания света между оптическими волокнами 31А, 31В. В некоторых формах, оптические волокна 31А, 31В могут каждое включать в себя сердечник 37А, 37В, по которому распространяется свет. Оптические волокна 31А, 31В могут дополнительно включать в себя оболочку 38А, 38В с более низким индексом преломления, что обеспечивает практически полное отражение на границе раздела между сердечниками 37А, 37В и соответствующими оболочками 38А, 38В.
Как показано на фиг. 11-13, при нажатии на оптические волокна 31А, 31В друг к другу, сердечники 37А, 37В находятся очень близко друг к другу (см. фиг. 12), и в конечном итоге, могут прикоснуться (см. фиг. 13). Если сердечники 37А, 37В расположены достаточно близко друг к другу, свет будет распространяться между сердечниками 37А, 37В.
Как показано на фиг. 12, оболочки 38А, 38В могут быть сжимаемыми оболочками (например, содержащие силиконовый материал). Кроме того, сердечники 37А, 37В могут быть сжимаемым, что увеличивает площадь поверхности контакта между сердечниками 37А, 37В, при контакте с гибкой сенсорной панелью 32 (см. фиг. 13).
В некоторых формах, область, где сердечники 37А, 37В почти вошли в соприкосновение или прикосновение, может быть увеличена с помощью мягкого, деформируемого материала сердечника. В альтернативных формах, лишь внешний слой сердечников 37А, 37В может включать в себя более мягкий материал.
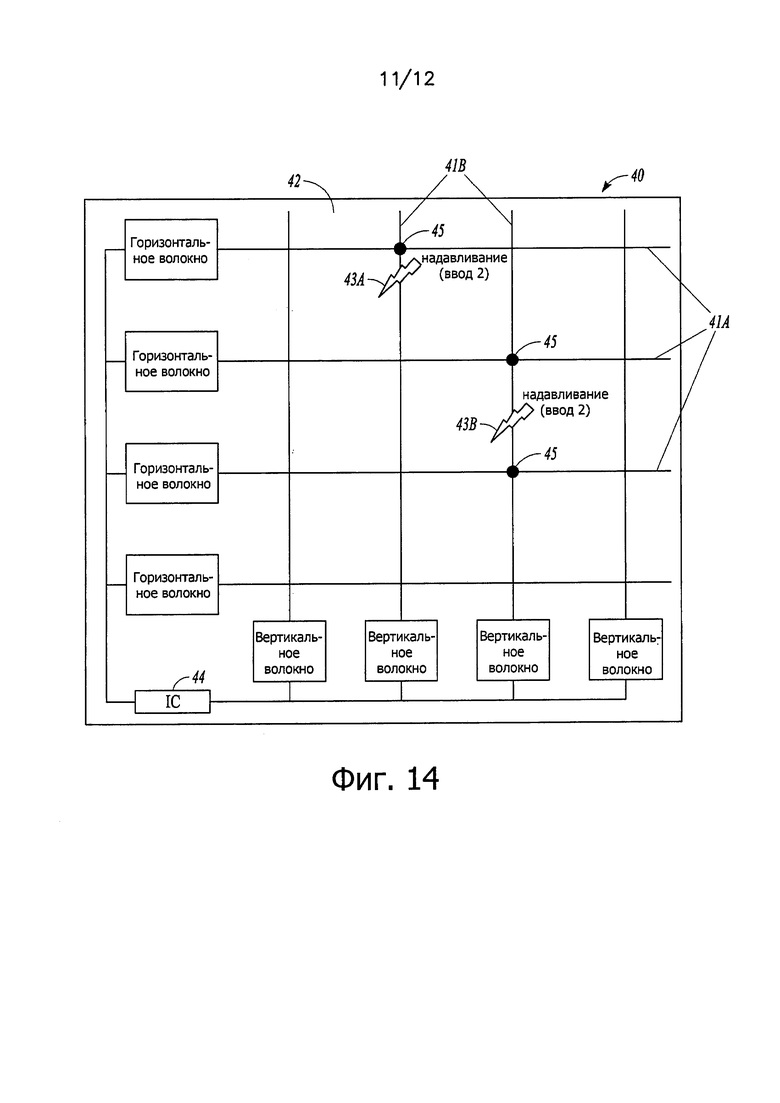
Фиг. 14 иллюстрирует другой пример носимого вычислительного устройства 40, которое включает в себя гибкую сенсорную панель 42. Примерное носимое вычислительное устройство 40 включает в себя проводящие волокна 41А, 41В, которые обнаруживают давление на проводящие волокна 41А, 41В.
Проводящие волокна 41А, 41В включают в себя множество проводящих волокон, которые расположены в пересекающейся конфигурации на гибкой сенсорной панели 42, как показано на фиг. 14. Следует отметить, что каждое из проводящих волокон 41А, 41В может быть индивидуальным волокном или композитным волокном.
Примерное носимое вычислительное устройство 40 дополнительно включает в себя интегральную схему 44, установленную на гибкой сенсорной панели 42. Интегральная схема 44 интерпретирует контакт с гибкой сенсорной панелью 42 посредством обнаружения изменения сопротивления между пересекающимися проводящими волокнами 41А, 41В.
Проводящие волокна 41А, 41В могут нести электрические сигналы. Кроме того, каждое проводящее волокно может быть электрически изолировано от любого другого проводящего волокна до тех пор, пока не будет детектирован контакт на гибкой сенсорной панели 42. В качестве примера, проводящие волокна 41А, 41В могут быть расположены и могут быть использованы для обнаружения местоположения контакта способом, известным для определения местоположений ячейки в DRAM устройстве.
Один из возможных принципов работы носимого вычислительного устройства 40 относится к изменению значений тока утечки из-за прикосновения к проводящим волокнам 41А, 41В. В качестве примера, снижение значения сопротивления ниже определенного уровня из-за контакта с проводящими волокнами, создает логический 0 или 1, что интегральная схема 44 использует для определения позиции контакта с гибкой сенсорной панелью 42. В качестве другого примера, когда проводящие волокна 41А, 41В электрически изолированы, слаботочные проводящие волокна 41А, 41В могут создать логический 0 или 1.
Еще один из возможных принципов работы носимого вычислительного устройства 40 относится к изменению значения сопротивления вследствие прикосновения к волокнам 41А, 41В. Это изменение значений сопротивления из-за прикосновения к волокнам 41А, 41В, создает падение тока сигнала или напряжения сигнала.
При нажатии (сопоставимое с нажатием кнопки) генерируется сигнала ввода в узлы 45 между пересекающимися проводящими волокнами 41А, 41В. Фиг. 14 показывает две позиции 43А, 43В нажатия, которые создают три узла 45. Изменение величины сопротивления точки пересечения горизонтального проводящего волокна 41А и вертикального проводящего волокна 41В, создает узел 45, который определяет местоположение контакта с гибкой сенсорной панелью 42. Физическая позиция этих узлов 45 на сенсорном дисплее 42 устанавливает позицию пользовательского ввода на носимом вычислительном устройстве 40.
Формы носимого вычислительного устройства 40 проектируются с учетом того, что информация не может быть ограничена наличием логического 0 и 1. В качестве примера, возможно наличие состояния между логическим 0 и 1, в случае, когда состояние используется для оценки величины нажатия.
Носимое вычислительное устройство 40 может быть предусмотрено для физического разделения между устройством ввода и приложением, которое выполняется посредством носимого вычислительного устройства 40. В качестве примера, это разделение может препятствовать умышленной порче устройства или любому нежелательному взаимодействию с другими электронными устройствами, которые принимают входной сигнал из носимого вычислительного устройства 40.
Носимое вычислительное устройство 40 может также быть выполнено в относительно больших размерах. Носимое вычислительное устройство 40 может быть увеличено в размерах простым добавлением дополнительных проводящих волокон 41А, 41В. Разрешение носимого вычислительного устройства 40 будет частично зависеть от того, сколько установлено проводящих волокон 41А, 41В, относительно размера носимого вычислительного устройства 40. Носимое вычислительное устройство 40, описанное здесь, также может быть экономически эффективным при изготовлении.
Фиг. 15 представляет собой блок-схему электронного устройства 1500, включающего в себя, по меньшей мере, одно из носимого вычислительного устройства 1, 10, 20, 30, 40, описанных здесь. Электронное устройство 1500 является лишь одним примером электронного устройства, в котором формы носимых вычислительных устройств 1, 10, 20, 30, 40, описанные здесь, могут быть использованы. Примеры электронного устройства 1500 включают в себя, но не ограничиваются ими, персональные компьютеры, планшетные компьютеры, мобильные телефоны, игровые устройства, МР3 или другие цифровые медиаплееры и т.д. В этом примере, электронное устройство 1500 включает в себя системы обработки данных, которые включает в себя системную шину 1502 для соединения различных компонентов электронного устройства 1500. Системная шина 1502 обеспечивает наличие коммуникационных линий между различными компонентами электронного устройства 1500 и может быть реализовано в качестве одной шины, как комбинацией шин или в любой другой подходящей форме.
Электронное устройство 1500, как описано здесь, может быть соединено с системной шиной 1502. Электронное устройство 1500 может включать в себя любую схему или комбинацию схем. В одном варианте осуществления электронное устройство 1500 включает в себя процессор 1512, который может быть любого типа. Как используется здесь, "процессор" означает любой тип вычислительной схемы, такой как, но не ограничиваясь этим, микропроцессор, микроконтроллер, микропроцессором со сложным набором команд (CISC), микропроцессор с сокращенным набором команд (RISC), микропроцессор со сверхдлинным командным словом (VLIW), графический процессор, цифровой сигнальный процессор (DSP), многоядерный процессор или любой другой тип процессора или схемы обработки информации.
Другие типы схем, которые могут быть включены в состав электронного устройства 1500, представляют собой заказную схему, специализированную интегральную схему (ASIC) или тому подобное, например, одну или более схем (например, схемы 1514 связи) для использования в беспроводных устройствах, таких как мобильные телефоны, планшетные компьютеры, портативные компьютеры, портативные рации и аналогичные электронные системы. IC может выполнять любой другой тип функции.
Электронное устройство 1500 может также включать в себя внешнюю память 1520, которая, в свою очередь, может включать в себя один или более элементов памяти, подходящих для конкретного приложения, например, оперативная память 1522 в виде оперативного запоминающего устройства (RAM), один или более жестких дисков 1524 и/или один или более дисков, которые устанавливаются на съемный носитель 1526, такие как компакт-диски (CD), карты флэш-памяти, цифровой видеодиск (DVD) и тому подобное.
Электронное устройство 1500 может также включать в себя устройство 1516 отображения, один или более громкоговорителей 1518 и клавиатуру, и/или контроллер 1530, который может включать в себя мышь, шаровой манипулятор, сенсорную панель, устройство распознавания голоса или любое другое устройство, которое позволяет пользователю системы вводить информацию в и принимать информацию из электронного устройства 1500.
Чтобы лучше проиллюстрировать носимые вычислительные устройства 1, 10, 20, 30, 40, описанные в данном документе, далее представлен не ограничивающий перечень примеров:
Пример 1 включает в себя носимое вычислительное устройство. Носимое вычислительное устройство включает в себя гибкую сенсорную панель, выполненную с возможностью ношения пользователем, и интегральную схему, установленную на гибкой сенсорной панели. Интегральная схема интерпретирует контакт с гибкой сенсорной панелью. Приемопередатчик установлен на гибкой сенсорной панели. Приемопередатчик передает и принимает сигналы на и от отдельного электронного устройства.
Пример 2 включает в себя носимое вычислительное устройство, описанное в примере 1, в котором, гибкая сенсорная панель выполнена с возможностью быть установленной непосредственно на тело пользователя.
Пример 3 включает в себя носимое вычислительное устройство по любому из примеров 1-2, в котором, гибкая сенсорная панель выполнена с возможностью быть вмонтированной в текстильное изделие.
Пример 4 включает в себя носимое вычислительное устройство по любому из примеров 1-3, и дополнительно содержит механизм отсоединения для выборочного крепления носимого вычислительного устройства к телу пользователя.
Пример 5 включает в себя носимое вычислительное устройство по примеру 4, в котором, механизм отсоединения включает в себя крепежную систему крючков и петель для избирательного крепления носимого вычислительного устройства к текстильному изделию, которое носит пользователь.
Пример 6 включает в себя носимое вычислительное устройство по любому из примеров 4-5, в котором отдельное электронное устройство выполнено с возможностью ношения пользователем.
Пример 7 включает в себя носимое вычислительное устройство. Носимое вычислительное устройство включает в себя гибкую сенсорную панель, выполненную с возможностью ношения пользователем. Гибкая сенсорная панель включает в себя первую линию передачи и интегральную схему, установленную на гибкой сенсорной панели. Интегральная схема выполнена с возможностью интерпретировать контакт с гибкой сенсорной панелью, посылая первый электрический сигнал по первой линии передачи, и определять локализованное изменение импеданса в первой линии передачи.
Пример 8 включает в себя носимое вычислительное устройство по примеру 7, в котором гибкая сенсорная панель включает в себя вторую линию передачи и интегральная схема интерпретирует контакт с гибкой сенсорной панелью, посылая второй электрический сигнал через вторую линию передачи, и определять локализованное изменение импеданса во второй линии.
Пример 9 включает в себя носимое вычислительное устройство по любому из примеров 7-8, в котором первый электрический сигнал и второй электрический сигнал являются каждый радиочастотными сигналами.
Пример 10 включает в себя носимое вычислительное устройство по любому из примеров 7-9, в котором, первая линия передачи извивается вперед и назад, из стороны в сторону по гибкой сенсорной панели, не пересекая первую линию передачи, и вторая линия передачи извивается вперед и назад, из стороны в сторону по гибкой сенсорной панели, не пересекая вторую линию передачи.
Пример 11 содержит носимое вычислительное устройство по любому из примеров 7-10, в котором интегральная схема определяет локализованную величину изменения импеданса в первой линии передачи, используя рефлектометрию с временным разрешением, и определяет локализованную величину изменения импеданса во второй линии передачи, используя рефлектометрию с временным разрешением.
Пример 12 содержит носимое вычислительное устройство по любому из примеров 9-11, в котором первая линия передачи и вторая линия передачи пересекаются друг с другом в нескольких местах.
Пример 13 включает в себя носимое вычислительное устройство по примеру 12, в котором первая линия передачи и вторая линия передачи являются ортогональными друг к другу, где первая линия передачи и вторая линия передачи пересекают друг друга.
Пример 14 включает в себя носимое вычислительное устройство. Носимое вычислительное устройство включает в себя гибкую сенсорную панель, выполненную с возможностью ношения пользователем. Гибкая сенсорная панель включает в себя первое оптическое волокно и второе оптическое волокно. Гибкая сенсорная панель дополнительно включает в себя первый детектор на конце первого оптического волокна и второй детектор на конце второго оптического волокна. Интегральная схема установлена на гибкой сенсорной панели. Интегральная схема выполнена с возможностью интерпретировать контакт с гибкой сенсорной панелью, посылая излучение через первое и второе оптические волокна к соответствующим первому и второму детекторам. Излучение распространяется между первым и вторым оптическими волокнами, когда первое и второе оптические волокна прижимаются близко друг к другу из-за контакта с гибкой сенсорной панелью. Расположение контакта с сенсорной панелью определяется путем анализа периодов времени распространения излучения по первому и второму оптическим волокнам к соответствующим первому и второму детекторам.
Пример 15 включает в себя носимое вычислительное устройство по примеру 14, в котором излучение представляет собой свет.
Пример 16 включает в себя носимое вычислительное устройство по любому из примеров 14-15, в котором первое оптическое волокно извивается вперед и назад из стороны в сторону по гибкой сенсорной панели без пересечения, и в котором второе оптическое волокно извивается вперед и назад из стороны в сторону по гибкой сенсорной панели без пересечения, и в котором первое оптическое волокно и второе оптическое волокно пересекают друг друга в нескольких местах.
Пример 17 содержит носимое вычислительное устройство по любому из примеров 14-16, в котором первое оптическое волокно и второе оптическое волокно контактируют друг с другом из-за контакта с гибкой сенсорной панелью, в котором время распространения излучения определяется путем измерения периода времени, необходимого для (i) прохождения первого излучения по первому оптическому волокну ко второму оптическому волокну и затем ко второму детектору; и (ii) прохождения второго излучения по второму оптическому волокну к первому оптическому волокну и затем к первому детектору.
Пример 18 содержит носимое вычислительное устройство по любому из примеров 14-17, в котором первое излучение осуществляется на иной частоте, чем второе излучение.
Пример 19 содержит носимое вычислительное устройство по любому из примеров 14-18, в котором первое и второе оптические волокна каждое из которых включает в себя сердечник, по которому распространяется излучение, и оболочку с более низким показателем преломления, чем сердечник для обеспечения отражения на границу раздела между сердечниками и соответствующими оболочками.
Пример 20 содержит носимое вычислительное устройство по примеру 19, в котором, оболочки являются сжимаемыми для облегчения сдвига сердечников при контакте с гибкой сенсорной панелью, и в котором, сердечники могут быть сжимаемыми для увеличения площади поверхности контакта между сердечниками при контакте с гибкой сенсорной панелью.
Пример 21 включает в себя носимое вычислительное устройство. Носимое вычислительное устройство включает в себя гибкую сенсорную панель, выполненную с возможностью ношения пользователем. Гибкая сенсорная панель включает в себя множество проводящих волокон, расположенных в виде пересекающейся конфигурации на гибкой сенсорной панели. Интегральная схема смонтирована на гибкой сенсорной панели. Интегральная схема интерпретирует контакт с гибкой сенсорной панелью с помощью обнаружения изменения величины сопротивления между пересекающимися проводящими волокнами.
Пример 22 содержит носимое вычислительное устройство по примеру 21, в котором множество проводящих волокон расположены в пересекающейся по горизонтали и вертикали конфигурации.
Пример 23 содержит носимое вычислительное устройство по любому из примеров 21-22, в котором каждое проводящее волокно электрически изолировано от всех других проводящих волокон, до момента контакта с гибкой сенсорной панелью.
Пример 24 содержит носимое вычислительное устройство по любому из примеров 21-23, в котором проводящие волокна переносят электрические сигналы.
Пример 25 содержит носимое вычислительное устройство по любому из примеров 21-24, в котором снижение значения сопротивления ниже определенного уровня из-за контакта с проводящими волокнами, создает логический 0 или 1, что интегральная схема использует для определения позиции контакта с гибкой сенсорной панелью.
Пример 26 содержит носимое вычислительное устройство по любому из примеров 21-25, в котором изменения величины сопротивления в точке пересечения между горизонтальным проводящим волокном и вертикальным проводящим волокном создает узел, который определяет местоположение контакта с гибкой сенсорной панелью.
Пример 27 включает в себя носимое вычислительное устройство. Носимое вычислительное устройство включает в себя гибкую сенсорную панель, выполненную с возможностью ношения пользователем, который носит носимое вычислительное устройство, и интегральную схему, установленную на гибкой сенсорной панели. Интегральная схема обнаруживает контакт с гибкой сенсорной панелью, когда контакт осуществляется только пользователем, который носит носимое вычислительное устройство, но не другими пользователями.
Пример 28 содержит носимое вычислительное устройство по примеру 27, в котором интегральная схема определяет, что контакт осуществлен с гибкой сенсорной панелью только пользователем, который носит носимое вычислительное устройство, но не другими пользователями, посылая электрический сигнал через кожный покров пользователя, и в котором гибкая сенсорная панель распознает только контакт с гибкой сенсорной панелью, когда контакт пропускает электрический сигнал к гибкой сенсорной панели.
Пример 29 содержит носимое вычислительное устройство по примеру 28, в котором интегральная схема посылает электрический сигнал через кожу пользователя в палец пользователя. Это краткое описание предназначено для представления неограничивающих примеров настоящего предмета изобретения. Оно не предназначено для обеспечения исключительного или исчерпывающего объяснения. Приводится подробное описание для обеспечения дополнительной информации о способах реализации.
Приведенное выше описание включает в себя ссылки на прилагаемые чертежи, которые являются частью подробного описания. На чертежах показаны, в качестве иллюстрации, конкретные варианты осуществления, в которых изобретение может быть осуществлено. Эти варианты осуществления также упоминается здесь как "примеры". Такие примеры могут включать в себя элементы в дополнение к тем, которые показаны или описаны. Тем не менее, авторы настоящего изобретения также рассматривают примеры, в которых показаны или описаны только те элементы. Более того, авторы настоящего изобретения также рассматривают примеры использования любого объединения или перестановки этих элементов, показанных или описанных (или один или более их аспектов), либо по отношению к конкретным примерам (или одного или более их аспектов), или по отношению к другим примерам (или один или более их аспектов) показанных или описанных здесь.
В этом документе, термины «а» или «an» используются, как это принято в патентных документах, и включают в себя один элемент или более чем один, независимо от каких-либо других случаях, или использования, «по меньшей мере, один» или «один или более». В данном документе термин «или» используется для обозначения не исключительности или, например, что "А или В" включает в себя "А, но не В"," В, но не А" и "А и Б", если не указано другое. В этом документе термины "включающий в себя" и «в котором» используются в качестве обычных эквивалентов соответствующих терминов "содержащий" и "где", используемые в обычном английском языке. Кроме того, в прилагаемой формуле изобретения термины «включающий в себя» и «содержащий» являются неограничивающими терминами, то есть система, устройство, изделие, состав, композиция или процесс, которые включают в себя элементы в дополнение к перечисленным, то такой термин в формуле изобретения все еще считается подпадающим под действие этой формулы изобретения. Кроме того, в формуле изобретения, термины "первый", "второй" и "третий" и т.д., используются только для обозначения и не предназначены для рассмотрения в качестве количественных требований к этим объектам.
Приведенное выше описание предназначено для иллюстрации и не является ограничительным. Например, описанные выше примеры (или один или более их аспектов) могут быть использованы в сочетании друг с другом. Другие варианты осуществления могут быть использованы, например, обычным специалистом в данной области после рассмотрения вышеизложенного описания.
Реферат предоставляется в соответствии с 37 C.F.R §1.72 (b), чтобы позволить читателю быстро установить характер технического описания. Он представлен с пониманием того, что не будет использоваться для интерпретации или ограничения объема или значений пунктов формулы изобретения.
Кроме того, в приведенном выше подробном описании различные признаки могут быть объединены для упрощения раскрытия. Это не должно быть истолковано как намерение того, что неупомянутый в формуле изобретения раскрытый признак имеет важное значение для любого пункта формулы изобретения. Скорее, предмет изобретения может заключаться в менее чем во всех признаках конкретного раскрытого варианта осуществления. Таким образом, содержание прилагаемой формулы изобретения включено в состав раздела Подробное описание, где каждый пункт формулы изобретения сам по себе является отдельным вариантом осуществления, и предполагается, что такие варианты осуществления могут быть объединены друг с другом в различных комбинациях или перестановках. Объем изобретения определяется со ссылкой на прилагаемую формулу изобретения, равно как весь объем эквивалентов, к которым относятся такие пункты формулы изобретения.


Изобретение относится к вычислительным устройствам. Технический результат заключается в обеспечении носимого вычислительного устройства, исключающего необходимость в использовании суетливых движений пальца или проговаривания голосовых команд. Устройство включает гибкую сенсорную панель, выполненную с возможностью ношения пользователем, интегральную схему, установленную на гибкой сенсорной панели, причем интегральная схема интерпретирует контакт с гибкой сенсорной панелью, при этом интегральная схема доставляет электрический сигнал к гибкой сенсорной панели через пользователя, когда пользователь касается гибкой сенсорной панели, и трансивер, установленный на гибкой сенсорной панели, причем трансивер отправляет и принимает сигналы на и от отдельного электронного устройства. 3 н. и 15 з.п. ф-лы, 15 ил.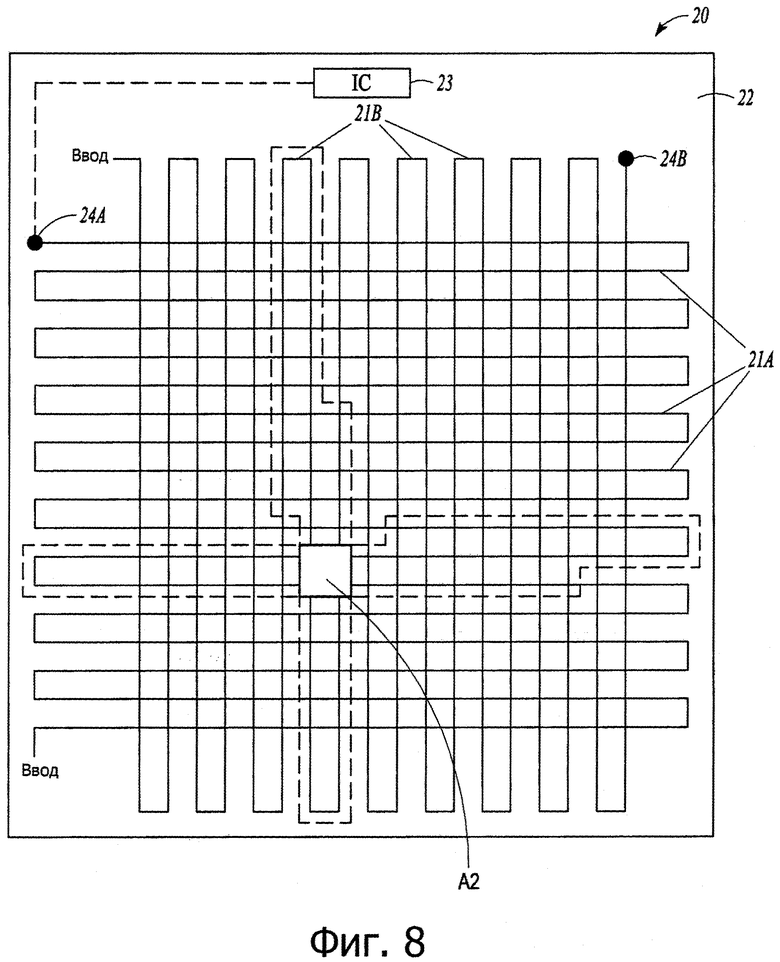
1. Носимое вычислительное устройство, содержащее:
гибкую сенсорную панель, выполненную с возможностью ношения пользователем;
интегральную схему, установленную на гибкой сенсорной панели, причем интегральная схема интерпретирует контакт с гибкой сенсорной панелью, при этом интегральная схема доставляет электрический сигнал к гибкой сенсорной панели через пользователя, когда пользователь касается гибкой сенсорной панели; и
трансивер, установленный на гибкой сенсорной панели, причем трансивер отправляет и принимает сигналы на и от отдельного электронного устройства.
2. Носимое вычислительное устройство по п. 1, в котором гибкая сенсорная панель выполнена с возможностью быть инкорпорированной в текстильное изделие.
3. Носимое вычислительное устройство по п. 1, в котором отдельное электронное устройство выполнено с возможностью ношения пользователем.
4. Носимое вычислительное устройство по п. 1, в котором интегральная схема обнаруживает контакт с гибкой сенсорной панелью, когда контакт осуществляется только пользователем, который носит носимое вычислительное устройство, и не другими пользователями.
5. Носимое вычислительное устройство по п. 1, в котором интегральная схема посылает электрический сигнал с заданной частотой через пользователя и в котором гибкая сенсорная панель распознает касание гибкой сенсорной панели пользователем, только когда касание пропускает электрический сигнал с заданной частотой к гибкой сенсорной панели.
6. Носимое вычислительное устройство по п. 4, в котором интегральная схема посылает электрический сигнал через пользователя к пальцу пользователя.
7. Носимое вычислительное устройство, содержащее:
гибкую сенсорную панель, выполненную с возможностью ношения пользователем, причем гибкая сенсорная панель включает в себя первую линию передачи и вторую линию передачи; и
интегральную схему, установленную на гибкой сенсорной панели, интегральная схема выполнена с возможностью интерпретировать контакт с гибкой сенсорной панелью, посылая первый электрический сигнал по первой линии передачи, посылая второй электрический сигнал по второй линии передачи, и определять локализованную величину изменения импеданса в первой линии передачи и во второй линии передачи,
в котором интегральная схема определяет локализованную величину изменения импеданса в первой линии передачи, используя рефлектометрию с временным разрешением, и определяет локализованную величину изменения импеданса во второй линии передачи, используя рефлектометрию с временным разрешением.
8. Носимое вычислительное устройство по п. 7, в котором первый электрический сигнал и второй электрический сигнал, каждый представляет собой радиочастотные сигналы.
9. Носимое вычислительное устройство по п. 7, в котором первая линия передачи извивается вперед и обратно из стороны в сторону по гибкой сенсорной панели, не пересекая первую линию передачи, и вторая линия передачи извивается вперед и обратно из стороны в сторону по гибкой сенсорной панели без пересечения второй линии передачи.
10. Носимое вычислительное устройство по п. 7, в котором первая линия передачи и вторая линия передачи пересекают друг друга в нескольких местах.
11. Носимое вычислительное устройство по п. 10, в котором первая линия передачи и вторая линия передачи являются ортогональными друг к другу, где первая линия передачи и вторая линия передачи пересекают друг друга.
12. Носимое вычислительное устройство, содержащее:
гибкую сенсорную панель, выполненную с возможностью ношения пользователем, причем гибкая сенсорная панель включает в себя первое оптическое волокно и второе оптическое волокно;
первый детектор на конце первого оптического волокна;
второй детектор на конце второго оптического волокна; и
интегральную схему, установленную на гибкой сенсорной панели, причем интегральная схема выполнена с возможностью интерпретировать контакт с гибкой сенсорной панелью, посылая излучение по первому и второму оптическим волокнам к соответствующим первому и второму детекторам, в котором излучение распространяется между первым и вторым оптическими волокнами, когда первое и второе оптические волокна прижаты близко друг к другу из-за контакта с гибкой сенсорной панелью, месторасположение контакта с сенсорной панелью определяется посредством анализа времени распространения излучения по первому и второму оптическим волокнам к соответствующим первому и второму детекторам.
13. Носимое вычислительное устройство по п. 12, в котором излучение представляет собой свет.
14. Носимое вычислительное устройство по п. 12, в котором первое оптическое волокно извивается вперед и назад из стороны в сторону по гибкой сенсорной панели без пересечения, и в котором второе оптическое волокно извивается вперед и назад из стороны в сторону по гибкой сенсорной панели без пересечения, и в котором первое оптическое волокно и второе оптическое волокно пересекают друг друга в нескольких местах.
15. Носимое вычислительное устройство по п. 12, в котором первое оптическое волокно и второе оптическое волокно контактируют друг с другом из-за контакта с гибкой сенсорной панелью, в котором время распространения излучения определяется путем измерения периода времени, необходимого для (i) прохождения первого излучения по первому оптическому волокну ко второму оптическому волокну и затем ко второму детектору; и (ii) прохождения второго излучения по второму оптическому волокну к первому оптическому волокну и затем к первому детектору.
16. Носимое вычислительное устройство по п. 15, в котором первое излучения осуществляется на другой частоте, чем второе излучение.
17. Носимое вычислительное устройство по п. 15, в котором первое и второе оптические волокна, каждое, включает в себя сердечник, через который распространяется излучения, и оболочку с более низким показателем преломления, чем сердечник, для обеспечения отражения на границе раздела между сердечниками и соответствующими оболочками.
18. Носимое вычислительное устройство по п. 17, в котором оболочки являются сжимаемыми для облегчения смещения сердечников друг к другу при контакте с гибкой сенсорной панелью и в котором сердечники могут быть сжимаемыми для увеличения площади поверхности контакта между сердечниками при контакте с гибкой сенсорной панелью.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| "Modular and Deformable Touch-Sensitive Surface Based On Time Domain Reflectometry", Raphael Wimmer et al, опубликовано 16.10.20 [найдено 14-02-2015] в cети Интернет: http://www.medien.ifi.lmu.de/pubdb/publications/pub/wimmer2011tdrTouch/wimmer2011tdrTouch.pdf | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| RU 2008133871 A, 27.02.2010. | |||

