Область техники, к которой относится изобретение
Настоящее изобретение относится к беспроводным зарядным системам транспортных средств, в частности, к снижению воздействия электрических сигналов, создаваемых зарядными системами, на посторонние объекты и живые организмы, находящиеся рядом с такими системами.
Уровень техники
Электронные устройства с питанием от аккумулятора, например, сотовые телефоны, используют перезаряжаемые аккумуляторы, которые необходимо подзаряжать при истощении заряда аккумулятора. Электрические и гибридные транспортные средства также используют перезаряжаемые аккумуляторы в системах привода, которые необходимо перезаряжать при истощении заряда аккумулятора. Обычно электрические и электронные устройства физически подключаются к электрическому зарядному устройству с помощью проводного соединения. Аккумуляторы, используемые в гибридных и электрических транспортных средствах, также обычно подключаются к зарядному устройству с помощью проводного соединения. В последнее время стали разрабатываться различные беспроводные зарядные устройства, например, индуктивные зарядные устройства, предназначенные для зарядки таких аккумуляторов без использования физического проводного соединения между электронным приемником или транспортным средством и передающим зарядным устройством.
Беспроводные зарядные устройства создают электрический сигнал в виде электромагнитного поля с помощью электромагнитных датчиков для передачи электрической энергии от зарядного устройства аккумулятору или устройству, имеющему заряжаемый аккумулятор.
Индуктивные зарядные устройства генерируют электрический сигнал в виде магнитного поля с помощью индукционных катушек для передачи электрической энергии от зарядного устройства аккумулятору в устройстве или транспортному средству, имеющему заряжаемый аккумулятор. Ранее были предложены индуктивные зарядные устройства для использования в различных местах внутри кабины транспортного средства, имеющего аккумулятор, обычно их устанавливают рядом с водителем или другими пассажирами, чтобы обеспечить легкий доступ к устройствам. Также были предложены индуктивные зарядные устройства для использования в заряжаемых аккумуляторах, применяемых в системах привода гибридных и электрических транспортных средств (например, аккумуляторных транспортных средств (BEV) и гибридных транспортных средств с подзарядкой от электросети (PHEV)).
Электромагнитные поля (EMF), создаваемые такими индуктивными зарядными устройствами, могут пересекаться с областью внутри или рядом с транспортным средством, где находится пассажир, пешеход и/или посторонние объекты. Электромагнитное поле, создаваемое при зарядке аккумулятора, используемого в системе привода гибридного или электрического транспортного средства, может иметь очень высокую энергию. Следовательно, предпочтительным является создание безопасного беспроводного зарядного устройства, устанавливаемого внутри транспортного средства, и беспроводных систем зарядки, используемых с аккумуляторами системы привода электрического или гибридного транспортного средства. Например, предпочтительным является сведение к минимуму воздействия электромагнитных полей на пользователя, например, на водителя и других пассажиров в транспортном средстве и/или на посторонние объекты или пешеходов, находящихся рядом с такими зарядными устройствами и системами.
Рост стоимости драгоценных металлов (например, платины, палладия, родия и золота) за последнее десятилетие стимулировал рост числа краж каталитических нейтрализаторов, используемых в транспортных средствах. Каталитические нейтрализаторы, используемые в большинстве автомобилей, содержат драгоценные металлы. Известны случаи краж, когда каталитические нейтрализаторы снимали с нижней части припаркованного транспортного средства. Риск для дилеров транспортных средств является более серьезным, поскольку многие из них паркуют сотни транспортных средств в выставочных залах и на улице. Сильнее всего проблема кражи каталитических нейтрализаторов касается грузовиков, автомобильных фургонов и внедорожников, поскольку у них достаточно большой клиренс. Стоимость замены каталитического нейтрализатора может превышать 1000 долларов США без учета расходов, связанных с неработоспособностью транспортного средства до окончания ремонта.
В известных подходах по ограничению и/или предотвращению краж каталитических нейтрализаторов использованы устройства и компоненты, механически закрепляющие нейтрализатор на транспортном средстве. Такие устройства и компоненты могут включать в себя несколько кабелей, зажимов и т.д., с помощью которых каталитический нейтрализатор прикрепляют к транспортному средству таким образом, чтобы потенциальный вор не смог его снять. Такие устройства и компоненты имеют достаточно высокую стоимость, которая может достигать 300 долларов США, что составляет до одной трети от стоимости замены каталитического нейтрализатора. Кроме того, такие механические системы ограничения и предотвращения кражи каталитических нейтрализаторов могут привести к значительному увеличению веса транспортного средства, что негативно влияет на эффективность использования топлива. Даже если помешать вору или потенциальному преступнику испортить и/или украсть каталитический нейтрализатор с помощью защиты, создаваемой данными механическими устройствами, он все же может нанести значительный ущерб транспортному средству до того, как он будет остановлен. Следовательно, предпочтительно создать системы защиты каталитических нейтрализаторов, которые смогут помешать потенциальным преступникам повредить и/или украсть данные системы каталитических нейтрализаторов еще до причинения ущерба.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения предлагается беспроводная зарядная система, которая включает в себя область зарядного устройства и беспроводное зарядное устройство для создания электрических сигналов зарядки в области зарядного устройства, с помощью которых производится зарядка устройства. Система также включает в себя датчик присутствия, расположенный рядом с областью зарядного устройства, и который позволяет обнаружить наличие объекта. Система также включает в себя контроллер для управления беспроводным зарядным устройством, который, по крайней мере, снижает уровень сигнала электрической зарядки при обнаружении объекта.
В соответствии с другим аспектом настоящего изобретения предлагается встроенная беспроводная зарядная система транспортного средства, которая включает в себя область зарядного устройства в транспортном средстве и беспроводное зарядное устройство для создания электромагнитного поля в области зарядного устройства для зарядки устройства. Система также включает в себя датчик присутствия, расположенный рядом с областью зарядного устройства, и который позволяет обнаружить объект. Система также включает в себя контроллер для управления беспроводным зарядным устройством, который, по крайней мере, снижает уровень электромагнитного поля при обнаружении объекта.
В соответствии с еще одним аспектом настоящего изобретения предлагается способ управления беспроводной системой зарядки, в котором для выполнения зарядки устройства в области устройства зарядки генерируют электрический сигнал с помощью беспроводного зарядного устройства. Затем с помощью датчика присутствия определяют наличие объекта рядом с областью устройства зарядки, и при обнаружении такого объекта управляют беспроводным зарядным устройством таким образом, чтобы, по крайней мере, снизить уровень электрического сигнала.
Один дополнительный аспект настоящего изобретения относится к созданию системы защиты каталитических нейтрализаторов для транспортного средства, основанной на обнаружении присутствия, которая включает в себя контроллер и каталитический нейтрализатор, расположенные в транспортном средстве. Система защиты также включает в себя пару электродов, электрически соединенных с контроллером и расположенных рядом с нейтрализатором. Контроллер следит за значением емкостного сопротивления между электродами, чтобы обнаружить движение снаружи транспортного средства рядом с нейтрализатором.
Другой аспект настоящего изобретения заключается в создании системы защиты каталитических нейтрализаторов для транспортного средства, основанной на обнаружении присутствия, которая включает в себя контроллер, расположенный в транспортном средстве, и несколько каталитических нейтрализаторов. Система защиты также включает в себя пару электродов, электрически соединенных с контроллером и расположенных рядом с нейтрализатором. Контроллер следит за значением емкостного сопротивления между электродами, чтобы обнаружить движение снаружи транспортного средства рядом с нейтрализатором.
В соответствии с еще одним аспектом настоящего изобретения предлагается зарядная система транспортного средства, которая включает в себя аккумулятор и область зарядного устройства. Система также включает в себя беспроводное зарядное устройство для создания электрического сигнала зарядки в области зарядного устройства для зарядки аккумулятора, а также несколько датчиков, расположенных таким образом, чтобы обнаруживать посторонние объекты и живые организмы рядом с областью зарядного устройства. Система также включает в себя контроллер для управления зарядным устройством, чтобы, по крайней мере, снижать уровень сигнала зарядки при обнаружении посторонних объектов или живых организмов рядом с областью зарядного устройства.
В соответствии с другим аспектом настоящего изобретения предусмотрена зарядная система транспортного средства, которая включает в себя аккумулятор и область зарядного устройства. Система также включает в себя беспроводное зарядное устройство, которое создает электрический сигнал зарядки в области зарядного устройства для зарядки аккумулятора, и несколько емкостных датчиков, установленных таким образом, чтобы обнаруживать посторонние объекты и живые организмы рядом с областью зарядного устройства. Система также включает в себя контроллер, соединенный с датчиками для оценки наличия посторонних объектов и живых организмов рядом с областью зарядного устройства.
В соответствии с другим аспектом настоящего изобретения предусмотрена система защиты транспортного средства, которая включает в себя транспортное средство, компонент транспортного средства и контроллер, установленный в транспортном средстве. Система также включает в себя несколько датчиков, выполненных с возможностью направлять данные о емкостном сопротивлении на контроллер, что позволяет определить наличие посторонних объектов и живых организмов рядом с компонентом. Кроме того, контроллер, по крайней мере, частично, оценивает наличие посторонних объектов и живых организмов рядом с компонентом на основе принятых данных о емкостном сопротивлении.
Эти и другие аспекты, объекты и особенности настоящего изобретения будут поняты и оценены специалистами в данной области при изучении следующего описания, формулы изобретения и сопроводительных чертежей.
Краткое описание чертежей
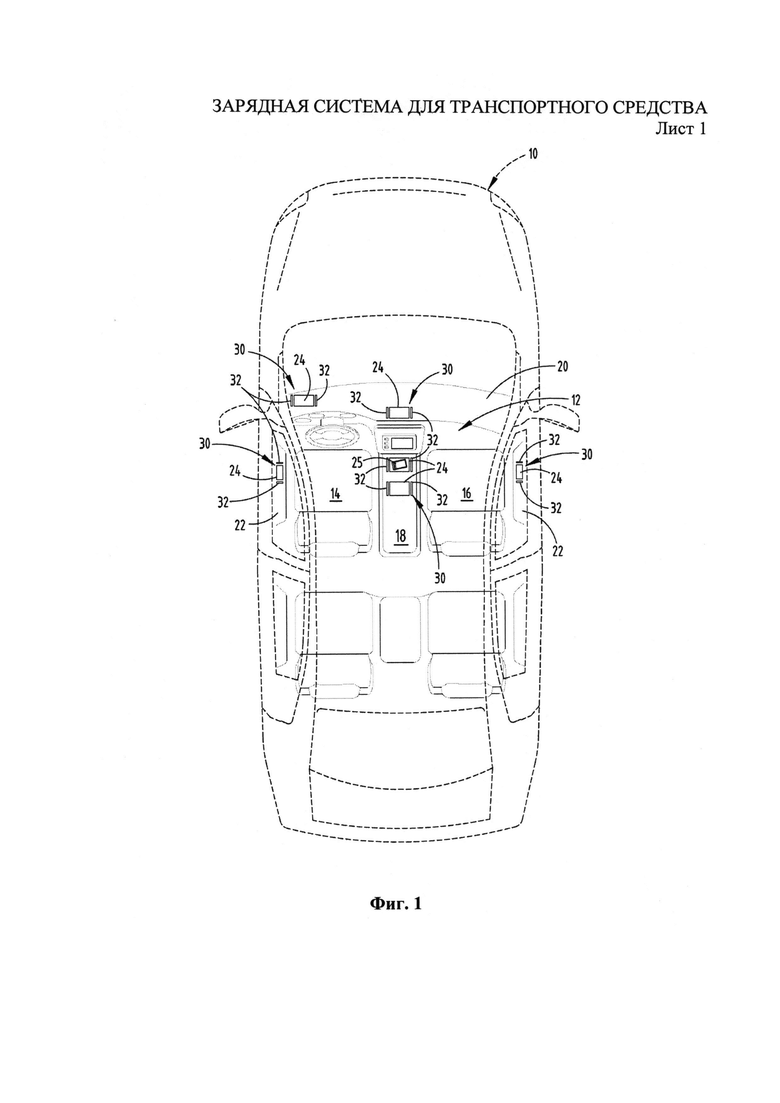
Фиг. 1 представляет собой общий вид кабины транспортного средства, в котором в разных возможных местах установлено беспроводное зарядное устройство по изобретению.
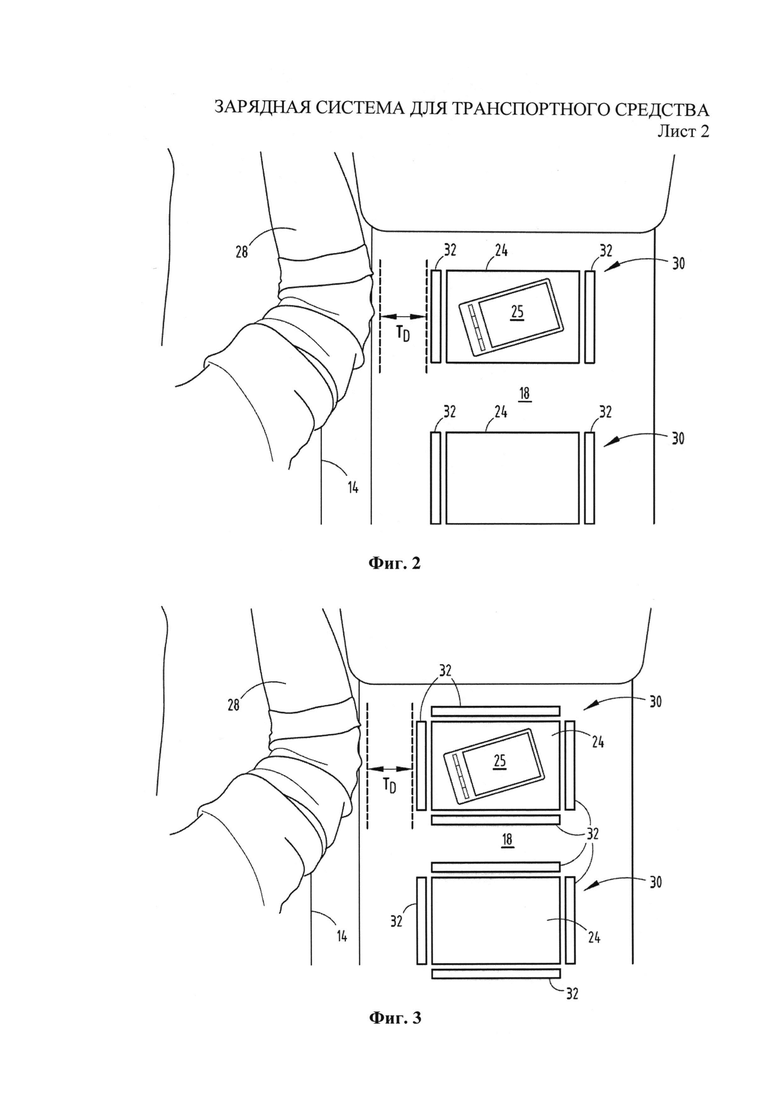
Фиг. 2 представляет собой увеличенный вид части кабины транспортного средства, на котором также показана система зарядки, выполняющая оценку присутствия и управление для снижения воздействия электромагнитного поля на пассажиров в транспортном средстве.
Фиг. 3 представляет собой увеличенный вид части кабины транспортного средства, на котором также показана система зарядки, выполняющая оценку присутствия вокруг беспроводного зарядного устройства.
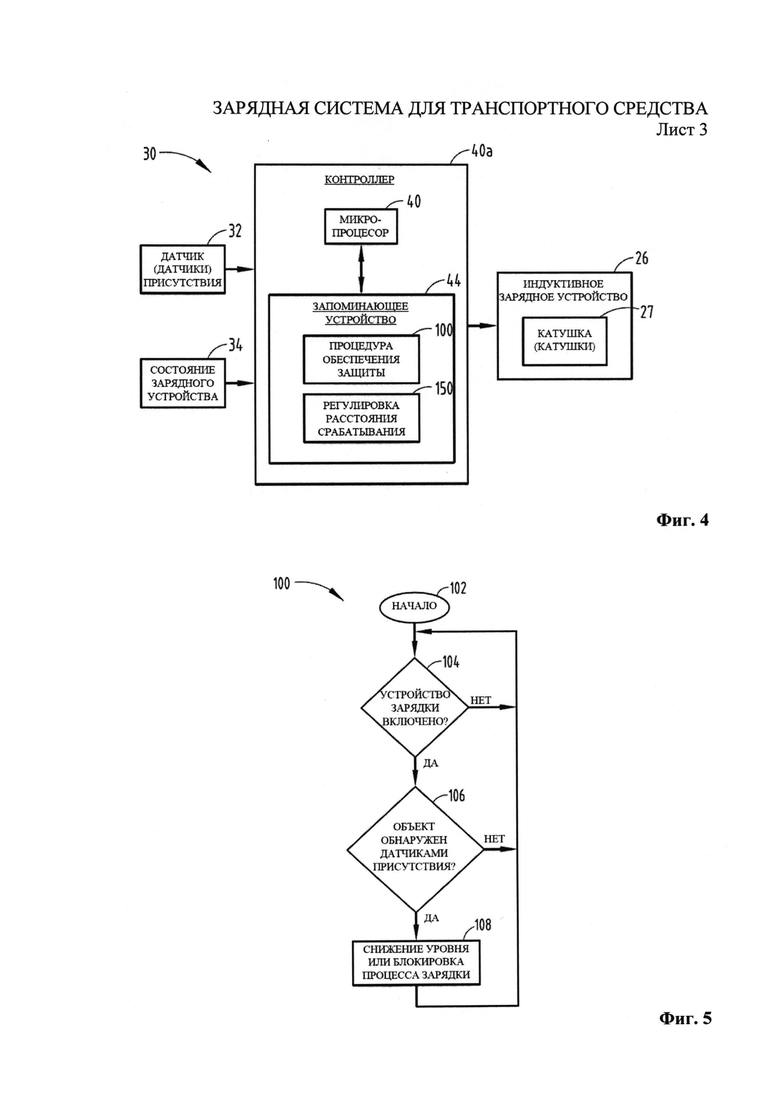
Фиг. 4 представляет собой схему индуктивной системы зарядки.
Фиг. 5 представляет собой логическую схему, иллюстрирующую процедуру управления индуктивной зарядкой для снижения воздействия электромагнитного поля на пассажира.
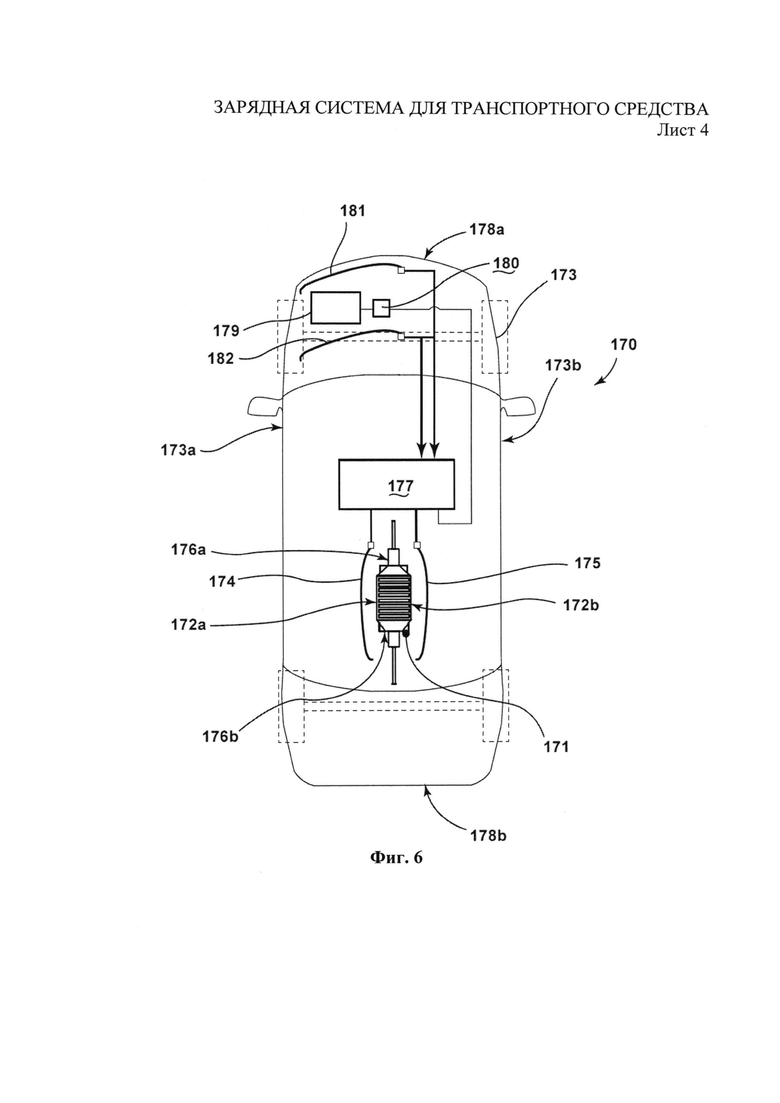
Фиг. 6 представлен схематический вид сверху системы защиты каталитических нейтрализаторов, основанной на обнаружении приближения, в соответствии с дополнительным вариантом осуществления изобретения.
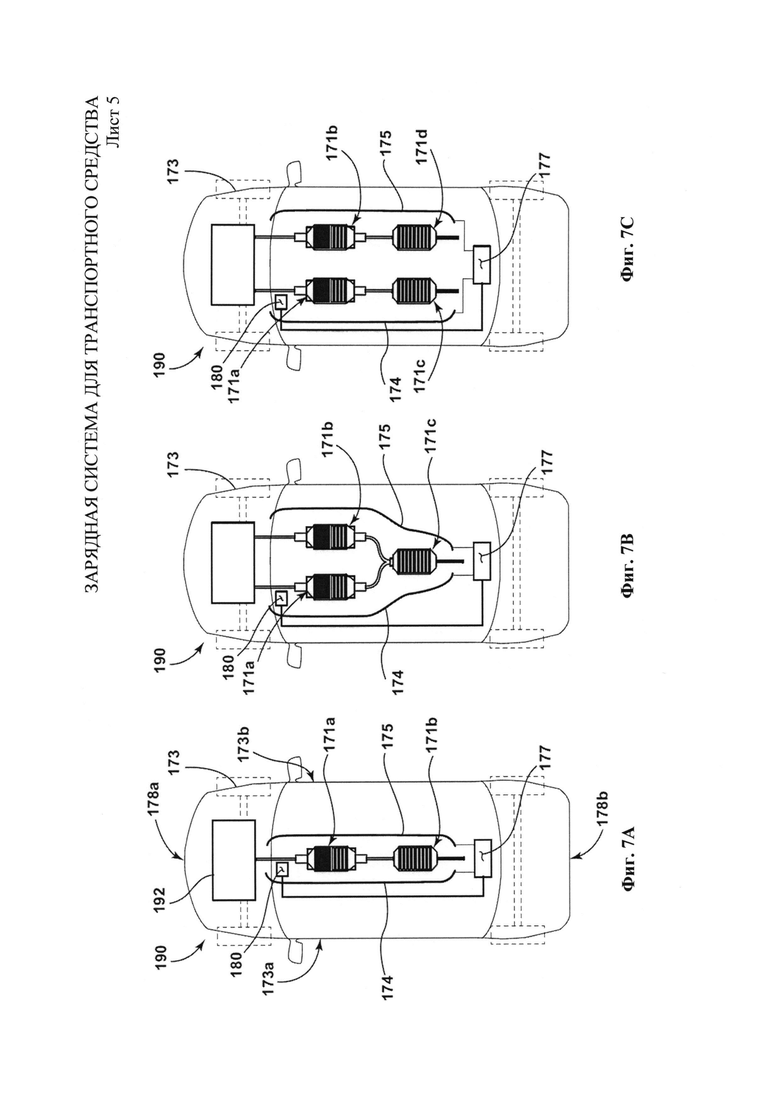
Фиг. 7А представлен схематический вид сверху системы защиты каталитических нейтрализаторов, основанной на обнаружении приближения, для использования с двумя каталитическими нейтрализаторами в соответствии с другим вариантом осуществления изобретения.
Фиг. 7В представлен схематический вид сверху системы защиты каталитических нейтрализаторов, основанной на обнаружении приближения, для использования с тремя каталитическими нейтрализаторами в соответствии с другим вариантом осуществления изобретения.
Фиг. 7С представлен схематический вид сверху системы защиты каталитических нейтрализаторов, основанной на обнаружении приближения, для использования с четырьмя каталитическими нейтрализаторами в соответствии с дополнительным вариантом осуществления изобретения.
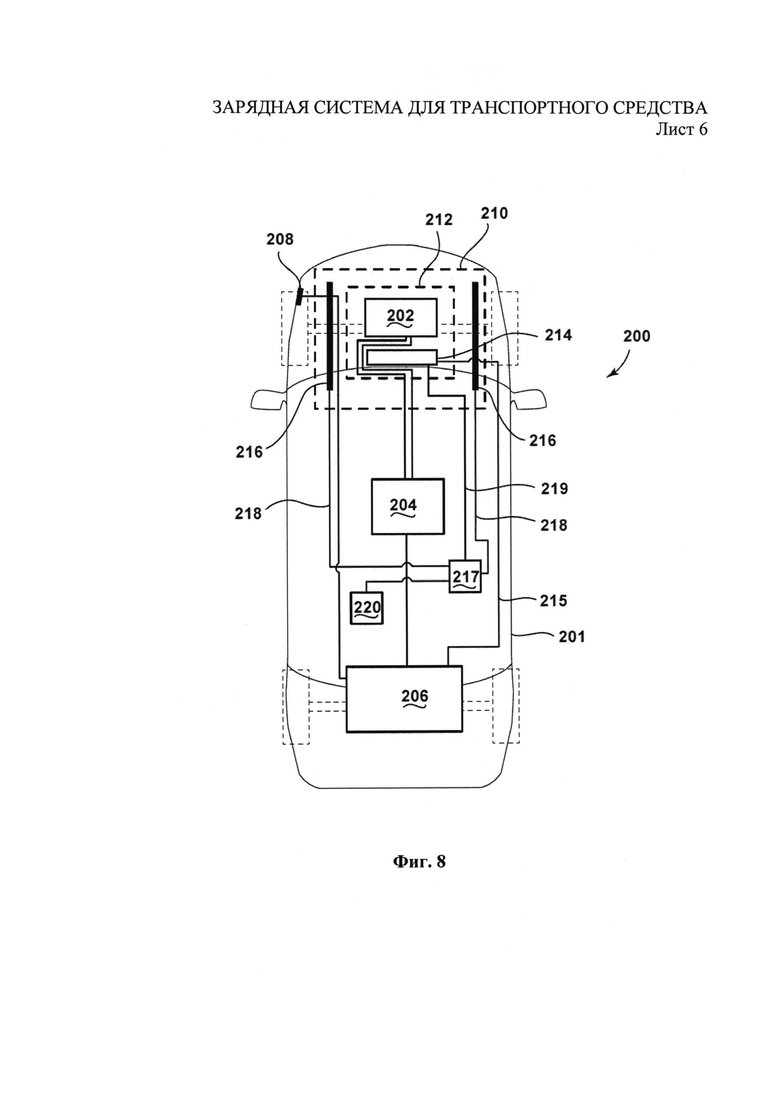
Фиг. 8 представляет собой схематический вид в плане системы безопасности зарядного устройства для использования в аккумуляторном электрическом транспортном средстве в соответствии с другим вариантом осуществления.
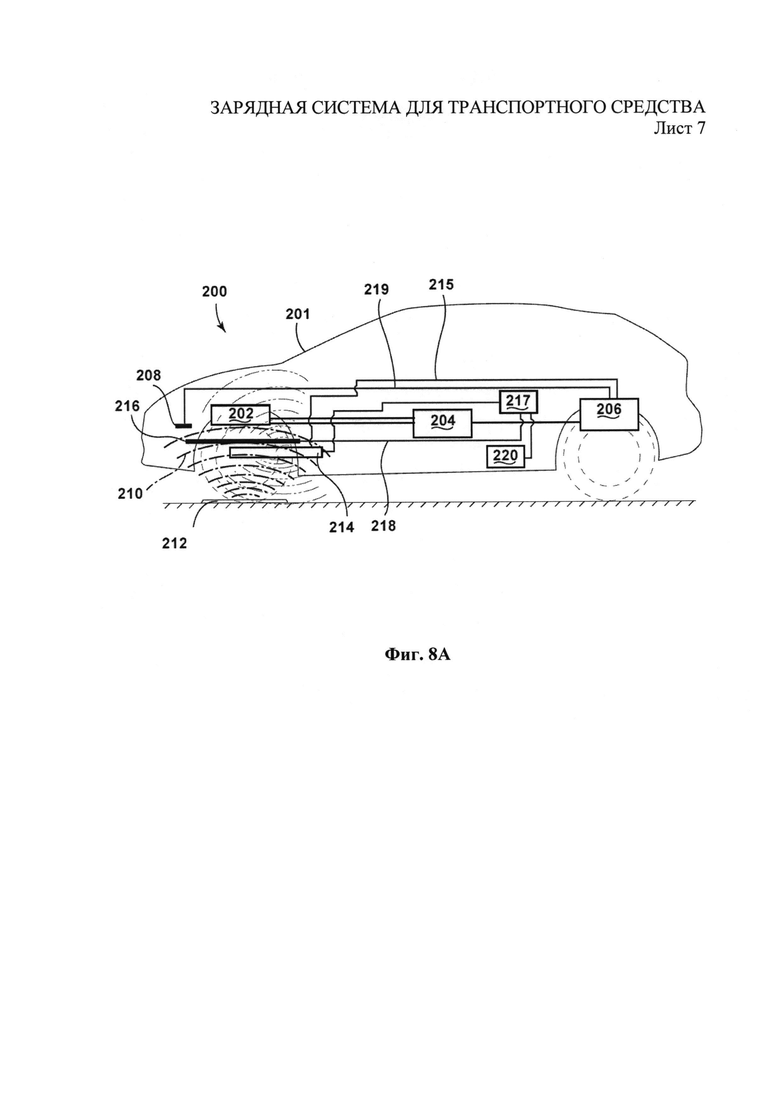
Фиг. 8А представляет собой схематический вид сбоку системы безопасности зарядного устройства, изображенной на Фиг. 8.
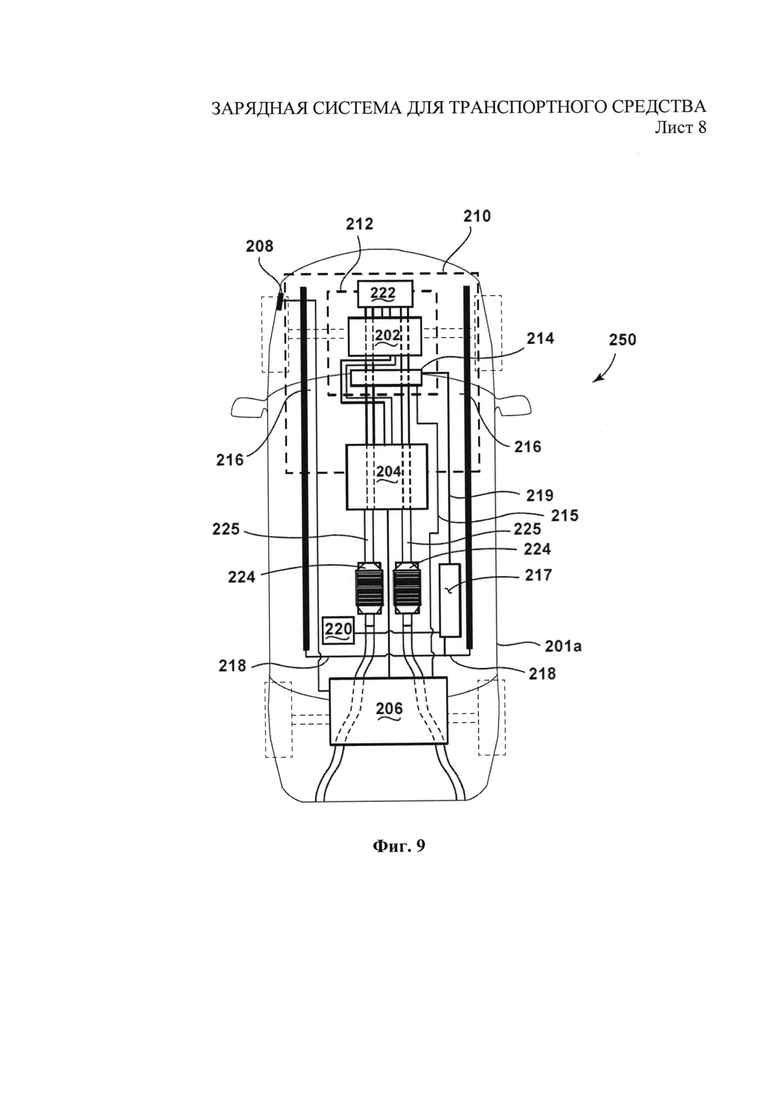
Фиг. 9 представляет собой схематический вид сверху комбинированной системы защиты и безопасности зарядного устройства для использования в транспортном средстве с подзарядкой от электросети в соответствии с другим вариантом осуществления изобретения.
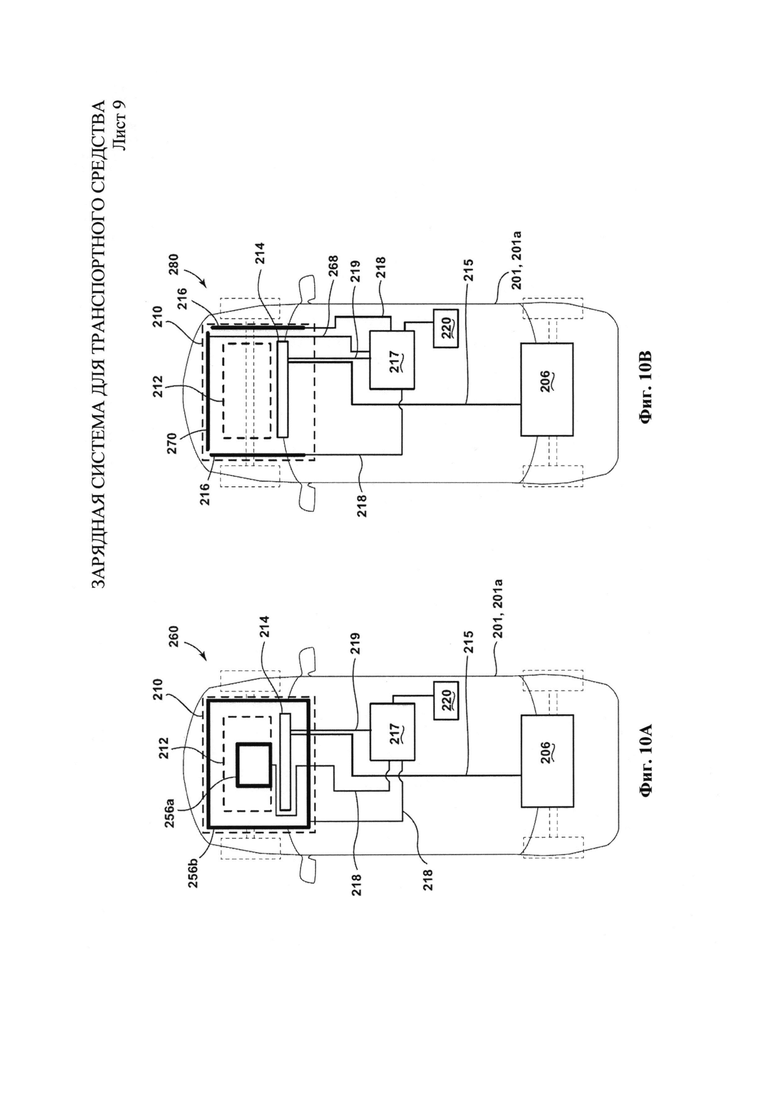
Фиг. 10А представляет собой схематический вид сверху системы безопасности с кольцевым расположением датчиков в соответствии с другим вариантом осуществления изобретения.
Фиг. 10В представляет собой схематический вид в плане системы защиты с датчиком опорного значения в соответствии с другим вариантом осуществления изобретения.
Осуществление изобретения
В соответствии с требованиями в настоящем документе подробно рассмотрены варианты осуществления настоящего изобретения; однако необходимо понимать, что раскрытые варианты должны рассматриваться исключительно как примеры реализации, и что они могут быть воплощены в различных альтернативных формах. На чертежах не обязательно приведены все подробности, некоторые схемы могут быть увеличены или уменьшены для демонстрации выполняемой функции. Таким образом, описание конкретных конструктивных и функциональных деталей следует толковать не как ограничения, а лишь в качестве иллюстрации для ознакомления специалистов в данной области техники с вариантами реализации изобретения.
На Фиг. 1-3 в общем виде показана внутренняя часть автомобильного транспортного средства 10, включающая в себя пассажирский салон 12, в котором используются различные варианты беспроводной зарядной системы 30. Транспортное средство 10 имеет сиденья, включая переднее водительское сиденье 14 и переднее пассажирское сиденье 16, каждое из них приспособлено для того, чтобы на нем сидел человек, являющийся пассажиром в пассажирском салоне 12 транспортного средства 10. Транспортное средство 10 также включает в себя центральную консоль 18, расположенную между передними сиденьями 14 и 16, приборную панель 20, находящуюся перед сиденьями 14 и 16, и подлокотники 22 на боковых дверях, находящиеся рядом с каждым сиденьем 14 и 16. Центральная консоль 18, приборная панель 20 и подлокотники 22, а также другие узловые компоненты транспортного средства могут быть оборудованы различными держателями для устройств, например, лотками и отсеками для хранения, в которые можно поместить одно или несколько устройств для беспроводной зарядки. Транспортное средство 10 также может включать в себя заднее сиденье и предназначенные для размещения беспроводной зарядки лотки и вещевые отсеки, которые расположены в области заднего сиденья.
Транспортное средство 10 может быть оборудовано одной или несколькими беспроводными зарядными системами 30 для обеспечения беспроводной зарядки одного или нескольких устройств, включающих в себя один или несколько перезаряжаемых аккумуляторов, которые подают электрическое питание для электронного устройства. В одном варианте осуществления одна или несколько беспроводных зарядных систем 30 могут располагаться в ящиках для хранения или специальных ящиках, расположенных в центральной консоли 18. Беспроводная зарядная система 30 включает в себя беспроводное зарядное устройство, например, индуктивное зарядное устройство в соответствии с одним вариантом осуществления. Индуктивные зарядные устройства обычно включают в себя одну или несколько индукционных катушек для создания электрических сигналов в виде электромагнитного поля (EMF) с низкими частотами в пределах области 24 зарядки. В представленном варианте осуществления область 24 зарядки может представлять собой лоток или вещевой отсек, в который можно положить устройство, чтобы данное устройство могло заряжаться, находясь в области 24 зарядки, с помощью электромагнитного поля за счет индуктивной связи. В соответствии с другим вариантом осуществления беспроводная зарядная система 30 может использовать область 24 зарядки, расположенную на одной или нескольких поддонах или в лотках приборной панели 20 транспортного средства. В соответствии с другим вариантом осуществления беспроводная зарядная система 30 может использовать область 24 зарядки, имеющую индуктивное зарядное устройство (не показано), расположенное в лотке подлокотника 22 рядом с дверью транспортного средства. В каждом варианте осуществления беспроводная зарядная система 30 имеет область 24 зарядки, сконфигурированную таким образом, чтобы в нее можно было поместить одно или несколько устройств, например, перезаряжаемые аккумуляторы или электрические/электронные устройства 25, использующие перезаряжаемые аккумуляторы, которые могут заряжаться с помощью электрического сигнала в области системы зарядки и могут находиться в месте, доступном для водителя или других пассажиров, находящихся в пассажирском салоне 12 транспортного средства 10. Примерами электронных устройств 25, которые могут быть заряжены с помощью зарядной системы 30, являются сотовые телефоны, планшетные компьютеры, видеоигровые устройства, камеры, радиоприемники, осветительные устройства, а также музыкальные и видеопроигрыватели.
Зарядная система 30 транспортного средства включает в себя одно или несколько беспроводных зарядных устройств для создания электрических сигналов зарядки в области 24 зарядного устройства для зарядки устройства, например, перезаряжаемого аккумулятора или электронного устройства с перезаряжаемым аккумулятором. Беспроводное зарядное устройство может включать в себя индуктивное зарядное устройство создания электромагнитного поля. Индуктивное зарядное устройство может включать в себя одну или несколько индукционных катушек, расположенных под нижней поверхностью области 24 зарядного устройства или на ней, например, под или на пластине для создания электромагнитного поля в области 24 зарядного устройства. Электромагнитное поле проходит в область 24 зарядного устройства и предназначено для взаимодействия с одной или несколькими индукционными катушками, установленными в устройстве 25, таким образом, чтобы передавать ему электрическую энергию для зарядки одного или нескольких перезаряжаемых аккумуляторов. В результате в области 24 зарядного устройства создается электромагнитное поле. Когда пассажир сидит в транспортном средстве рядом с беспроводной системой зарядки, в частности, рядом с областью 24 зарядного устройства, может быть предпочтительным предотвращение проникновения электромагнитного поля в тело пассажира. Беспроводная зарядная система 30 использует один или несколько датчиков 32 присутствия, расположенных рядом с областью 24 зарядного устройства для обнаружения объекта, например, части тела пассажира, в непосредственной близости или рядом с областью 24 зарядного устройства и снижения уровня сигнала зарядки при обнаружении объекта.
Система определения присутствия может включать в себя один или несколько датчиков 32 присутствия, расположенных по крайней мере на одной стороне области зарядного устройства, как показано на Фиг. 2. Показаны первый и второй датчики 32 присутствия, при этом первый датчик 32 присутствия расположен между областью 24 зарядного устройства в лотке и сиденьем 14 транспортного средства, а другой датчик 32 присутствия расположен между противоположной стороной области 24 зарядного устройства и сиденьем 16 на противоположной стороне. В соответствии с другим вариантом осуществления область 24 зарядного устройства может быть практически полностью ограничена одним или несколькими датчиками 32 присутствия, как показано на Фиг. 3. В представленном варианте осуществления по периметру области 24 зарядного устройства может быть установлено четыре отдельных датчика 32 присутствия. В соответствии с другим вариантом осуществления для ограничения области 24 зарядного устройства может быть предусмотрен один датчик 32 присутствия. В других вариантах осуществления один или несколько датчиков 32 присутствия может быть расположено под областью 24 зарядного устройства, на крышке над областью 24 зарядного устройства или в другом месте, подходящем для обнаружения объекта в непосредственной близости от области 24 зарядного устройства.
В соответствии с одним вариантом осуществления датчик 32 присутствия может представлять собой емкостной датчик. Датчик 32 присутствия создает поле обнаружения для определения контакта или приближения пользователя к одному или нескольким датчикам присутствия, например, для обнаружения объекта 28 (руки, ноги или пальца пользователя). В данном варианте осуществления поле обнаружения от каждого датчика 32 присутствия представляет собой емкостное поле, при этом специалисты в данной области техники должны понимать, что часть тела пользователя является электропроводящей и имеет диэлектрические свойства, что приводит к изменению поля обнаружения или возникновению возмущений в нем. Однако специалисты в данной области техники также должны понимать, что для обнаружения объекта в непосредственной близости от области 24 зарядки могут быть использованы дополнительные или альтернативные типы датчиков присутствия, например, но не ограничиваясь этим, индуктивные датчики, оптические датчики, температурные датчики, резистивные датчики, ультразвуковые датчики, лазеры, полевые датчики и т.д. или их комбинации. Примеры датчиков присутствия приведены в руководстве по проектированию сенсорных датчиков ATMEL® от 9 апреля 2009 г., 10620 D-AT42-04/09, перекрестная ссылка на которое полностью включена в настоящий документ посредством ссылки.
Датчики 32 присутствия могут быть выполнены таким образом, чтобы иметь регулируемую дальность обнаружения, которая показана в виде порогового расстояния TD, в пределах которого может быть обнаружено наличие объекта. Как показано на Фиг. 2, регулируемая дальность может быть изменена за счет изменения порогового значения расстояния TD. В соответствии с одним примером, пороговое расстояние TD может быть отрегулировано таким образом, чтобы обнаруживать наличие объектов в диапазоне от 2 до 12 сантиметров. Это может быть достигнуто за счет регулировки длительности импульса одного или нескольких емкостных датчиков с помощью программного обеспечения таким образом, чтобы устанавливать радиус поля обнаружения датчика присутствия относительно области 24 зарядного устройства. Таким образом, беспроводная зарядная система 30 может иметь регулируемую дальность обнаружения присутствия, что позволит использовать его с совершенно разными транспортными средствами, конфигурациями зарядного устройства и пользователями. Кроме того, следует понимать, что зарядка может производиться с меньшим уровнем сигнала или быть приостановлена при обнаружении использования устройства, например, использования клавиатуры на телефоне.
Датчики 32 присутствия могут обнаруживать объект в непосредственной близости от области зарядного устройства при обнаружении объекта в пределах области зарядного устройства или в пределах двенадцати сантиметров (12 см) в соответствии с одним вариантом осуществления. В одном варианте осуществления беспроводная система зарядки управляет беспроводным зарядным устройством таким образом, чтобы, по крайней мере частично, снижать уровень электрического сигнала зарядки при обнаружении объекта датчиком присутствия. В соответствии с другим вариантом осуществления беспроводная система зарядки блокирует или прекращает процесс электрической зарядки при обнаружении объекта в непосредственной близости от области зарядки. В соответствии с другими вариантами осуществления беспроводная система зарядки может сначала снижать уровень электрического сигнала зарядки при обнаружении объекта на первом расстоянии, например, в 12 сантиметрах от области зарядного устройства, а затем снижать уровень или отключать подачу электрического сигнала зарядки при обнаружении объекта на втором (меньшем) расстоянии, например, в 2 сантиметрах от области зарядного устройства. Таким образом, мощность электрического сигнала может быть снижена до уровня, который позволяет поддерживать заряд устройства и приостанавливать зарядку в том случае, когда часть тела находится очень близко или в самой области 24 зарядки.
Датчик 32 присутствия может включать в себя емкостной датчик, имеющий постоянную частоту переключения или динамическую частоту переключения. С помощью динамической частоты переключения можно предотвратить взаимное влияние частот, которые могут накладываться или попадать в один диапазон с частотой сигнала зарядки, за счет смены частоты. Кроме того, могут быть предусмотрены емкостные схемы переключения, которые заглушают частоты, которые используются зарядным устройством, либо само зарядное устройство может заглушать частоты, используемые датчиком присутствия во избежание взаимного влияния.
На Фиг. 4 также изображена беспроводная зарядная система 30, имеющая схему управления, которая в одном варианте осуществления показана в виде контроллера 40а, включающего в себя микропроцессор 40 и запоминающее устройство 44. Контроллер 40а может включать в себя альтернативную или дополнительную аналоговую и (или) цифровую схему. В запоминающем устройстве 44 сохранена процедура 100 защиты и настраиваемые значения 150 расстояния срабатывания. В качестве входных сигналов контроллер 40а принимает выходной сигнал датчика (датчиков) 32 присутствия и сигнал, соответствующий текущему состоянию 30 зарядного устройства, например, включенное или выключенное. Контроллер 40а обрабатывает входные сигналы, используемые процедурой 100 защиты, и генерирует выходной сигнал для индуктивного зарядного устройства 26, имеющего индукционную катушку (катушки) 27, таким образом, чтобы, по крайней мере, снизить уровень или отключить подачу электрического сигнала зарядки, генерируемого зарядным устройством 26 в области зарядки, при обнаружении объекта датчиком (датчиками) присутствия. Область обнаружения датчика (датчиков) 32 присутствия может быть отрегулирована с помощью выбора настраиваемого значения 150 расстояния срабатывания.
На Фиг. 5 показана процедура 100 защиты, соответствующая одному варианту осуществления. Процедура 100 начинается на этапе 102 и переходит к этапу 104 принятия решения, на котором определяется, включено ли беспроводное зарядное устройство, если оно выключено, то происходит переход на этап 104. Если будет определено, что беспроводное зарядное устройство включено, процедура 100 переходит к этапу 106 принятия решения, на котором определяется, обнаружен ли объект в непосредственной близости от области зарядного устройства с помощью датчика (датчиков) присутствия. Под термином «в непосредственной близости» понимается наличие обнаруженного объекта в области зарядного устройства или достаточно близко к области зарядного устройства, например, в 12 сантиметрах от нее. При отсутствии обнаруженного объекта в непосредственной близости от области зарядного устройства процедура 100 возвращается на этап 104. При обнаружении объекта в непосредственной близости от области зарядного устройства с помощью датчика (датчиков) присутствия процедура 100 переходит к этапу 108, на котором происходит снижение мощности или блокировка процесса зарядки устройства в области зарядного устройства.
Следует понимать, что беспроводная зарядка продолжится, когда объект перестанет находиться в непосредственной близости от области зарядного устройства. Соответственно, мощность электромагнитного поля в области зарядного устройства снижается или выключается при обнаружении объекта в непосредственной близости от области зарядного устройства.
Таким образом, предпочтительно, чтобы беспроводная система зарядки ослабляла или блокировала подачу электрического сигнала в виде электромагнитного поля в области зарядного устройства при обнаружении объекта, например, части тела человека, в непосредственной близости от области зарядного устройства. Предпочтительно, чтобы это предотвращало проникновение электромагнитного поля в тело человека. Беспроводная система зарядки особенно хорошо подходит для использования в транспортном средстве, в которых пользователи обычно хранят персональные электронные устройства рядом с собой. Однако система может быть полезна и в других вариантах осуществления. Следует понимать, что, когда датчик присутствия перестает фиксировать наличие объекта, мощность беспроводной зарядки может быть снова увеличена, после чего процесс зарядки может быть возобновлен.
В соответствии с другим вариантом осуществления, показанном на Фиг. 6, система защиты каталитических нейтрализаторов 170, основанная на обнаружении присутствия, может быть использована для защиты целостности каталитических нейтрализаторов 171 в транспортном средстве 173. Система 170 включает в себя пару электродов 174 и 175, которые электрически соединены с контроллером 177. Изображенные каталитические нейтрализаторы 171 имеют левую сторону 172а, правую сторону 172b, переднюю часть 176а и заднюю часть 176b. Аналогичным образом транспортное средство 173 имеет левую сторону 173 а, правую сторону 173b, переднюю часть 178а и заднюю часть 178b.
Электроды 174 и 175 располагаются рядом с левой стороной 172а и правой стороной 172b каталитических нейтрализаторов 171 соответственно (см. Фиг. 6). Электроды 174 и 175 могут быть изготовлены из материалов, которые позволят оптимизировать обнаружение изменений емкостного сопротивления между ними. Электроды 174 и 175 могут быть также расположены рядом с передней частью 176а и задней частью 176b каталитических нейтрализаторов 171. Также электроды 174 и 175 могут быть расположены в других местах, где они будут находиться рядом с двумя противоположными сторонами или поверхностями каталитических нейтрализаторов 171 (например, передняя и задняя части 176а и 176b соответственно).
Контроллер 177 в системе 170 защиты сконфигурирован таким образом, чтобы контролировать изменений емкостное сопротивление между электродами 174 и 175 для обнаружения движения объектов снаружи транспортного средства 173 рядом с нейтрализатором 171. Движение объектов, животных и (или) людей рядом с каталитическим нейтрализатором 171 приведет к изменению емкостного сопротивления между электродами 174 и 175 относительно опорного порогового значения. С помощью этих данных контроллер 177 может оценить, остаются ли посторонние лица и (или) объекты, используемые посторонними лицами, рядом с каталитическим нейтрализатором 171. Одним из преимуществ системы 170 является то, что она может обнаруживать наличие посторонних лиц рядом с нейтрализатором 171 до того, как он или она повредит или иным образом попытается снять каталитический нейтрализатор 171.
Система 170 защиты может использовать контроллер 177 для предупреждения посторонних лиц, находящихся рядом с нейтрализатором 171, до того, как он или она повредит транспортное средство 173 и (или) нейтрализатор 171. Кроме того, контроллер 177 может быть электрически соединен с элементом 180 сигнализации для включения аварийного сигнала для предупреждения посторонних лиц или других людей, находящихся в непосредственной близости от транспортного средства 173. Элемент 180 сигнализации также может быть использован для оповещения людей, находящихся на большем расстоянии, включая владельца транспортного средства, о наличии объектов и (или) посторонних лиц рядом с нейтрализатором 171. Элемент 180 сигнализации может представлять собой звуковое устройство (например, клаксон) или визуальное устройство (например, мигающий или стробирующий сигнал). Элемент 180 сигнализации может также представлять собой стандартный компонент и схему защиты от краж (например, чередующаяся последовательность мигания передних фар, задних фар и других сигналов, после чего подаются звуковые сигналы). Элемент 180 сигнализации может также включать в себя беспроводные передатчики, передающие сигнал в государственные органы, владельцу транспортного средства и (или) другой ответственной стороне (например, коммерческой организации по предотвращению краж), после получения контроллером 177 неправильного уровня сопротивления. Если беспроводные устройства встроены в элемент 180 сигнализации, система 170 может быть также сконфигурирована для бесшумного и незаметного оповещения для того, чтобы увеличить вероятность поимки вора или вандала на месте преступления. Элемент 180 сигнализации может также включать в себя камеры (не показаны), установленные рядом с каталитическим нейтрализатором 171 для получения фотодоказательств против потенциального вора и (или) иного постороннего лица. Также элемент 180 сигнализации может представлять собой элемент сигнализации с изменяемым типом выходного сигнала, способный генерировать различные аварийные сигналы. Например, элементом 180 сигнализации может быть гудок транспортного средства, способный создавать сигналы с разным уровнем шума, или фары, способные создавать свет с различной интенсивностью.
За счет измерения емкостного сопротивления между электродами 174 и 175 контроллер 177 может определять присутствие посторонних лиц (например, потенциальных воров каталитических нейтрализаторов), животных или объектов (например, оборудования, используемого для кражи и (или) вмешательства в каталитический нейтрализатор) рядом с каталитическим нейтрализатором 171. В одном способе обнаружения контроллер 177 может сравнивать измеренное емкостное сопротивление между электродами 174 и 175 с заранее заданным пороговым значением емкостного сопротивления. Пороговое значение емкостного сопротивления основано на значении емкостного сопротивления между электродами 174 и 175, измеренном в нормальном рабочем состоянии без посторонних лиц, животных или объектов между электродами. Соответственно полученный контроллером 177 уровень емкостного сопротивления, который превышает пороговое значение, может свидетельствовать о наличии объектов, посторонних лиц или животных. Контроллер 177 может подать звуковой сигнал с помощью элемента 80 сигнализации после обнаружения уровня емкостного сопротивления, превышающего пороговое значение.
При другом подходе контроллер 177 сконфигурирован таким образом, чтобы отфильтровывать ложные положительные значения, полученные на основе сигналов переходных процессов, которые не свидетельствуют о наличии объекта и постороннего лица рядом с каталитическим нейтрализатором 171. Например, наличие кошек, собак, грызунов, палок или травы, которую под транспортное средство 173 задувает ветер, и прочие аналогичные факторы могут привести к изменению емкостного сопротивления между электродами 174 и 175, измеренного контроллером 177. Поскольку подобные ситуации зачастую имеют кратковременный характер и (или) создают изменения уровня емкостного сопротивления ниже уровней, достигаемых при наличии объектов и (или) посторонних лиц, то контроллер 177 может отфильтровывать их. Например, эмпирические данные о емкостном сопротивлении могут генерироваться таким образом, чтобы указывать на наличие объектов или посторонних лиц, учитывая данные, полученные с помощью упомянутых выше сигналов переходных процессов. Предварительно установленные пороговые значения для амплитуды и продолжительности изменения емкостного сопротивления могут быть записаны на контроллере 177, основываясь на этих эмпирических данных, что позволит контроллеру 177 отфильтровывать сигналы переходных процессов.
Аналогичным образом условия окружающей среды (например, накопление снега, льда, грязи и т.д.) могут привести к незначительным изменениям емкостного сопротивления, измеренного между электродами 174 и 175 в течение относительно большого периода времени. Соответственно подобные изменения могут превышать заданный пороговый уровень (например, на основе предварительных эмпирических данных) в течение длительного времени, но отличаться по своему характеру от резкого кратковременного изменения, вызванного наличием объектов и (или) посторонних лиц рядом с каталитическим нейтрализатором 171. Например, в одном из таких вариантов обнаружения контроллер 177 будет активировать элемент 180 сигнализации после обнаружения изменения емкостного сопротивления между электродами 174 и 175, превышающего заранее заданное пороговое емкостное сопротивление в течение предварительно заданного времени. С помощью двух пороговых значений система 170 защиты может использовать контроллер 177 для того, чтобы отфильтровывать ложные положительные значения, которые генерируются в течение большего времени, как дрейф, который не указывает на наличие объектов и (или) посторонних лиц.
В соответствии с другой схемой обнаружения контроллер 177 может активировать элемент 80 сигнализации с первым уровнем выходного сигнала при обнаружении изменения емкостного сопротивления между электродами 174 и 175, которое превышает первое предварительно установленное пороговое значение в течение первого предварительно установленного периода времени. Такой первый уровень сигнализации может быть аналогичен предупреждению. Подобное предупреждение может быть использовано для того, чтобы отпугнуть грызунов, домашних и диких животных, чтобы они отошли от каталитического нейтрализатора 171. В некоторых примерах предупреждение может напугать посторонних лиц, которые могли частично войти в зону обнаружения между электродами 174 и 175, чтобы они отошли от транспортного средства. Однако в этом случае системе 170 защиты придется оценивать, действительно ли измеренный уровень емкостного сопротивления между электродами 174 и 175 вызван наличием объектов, посторонних лиц или животных. Соответственно схема обнаружения подает сигнал контроллеру 177 на активацию элемента 180 сигнализации на втором, максимальном уровне выходного сигнала при обнаружении изменения емкостного сопротивления между электродами 174 и 175, которое превышает второе предварительно установленное пороговое значение в течение второго предварительно установленного периода времени. Для тонкой регулировки защиты от ложных положительных сигналов, возникающих из-за переходных процессов (например, присутствия грызунов), которые не свидетельствуют о наличии объектов или посторонних лиц рядом с каталитическим нейтрализатором 171, могут быть использованы различные схемы. Следует понимать, что схема обнаружения, используемая контроллером 177, может использовать пороговые значения емкостного сопротивления, пороговые значения продолжительности для таких изменений и множество уровней таких пороговых значений для различения наличия объектов и посторонних лиц рядом с каталитическим нейтрализатором 171, а также ложных положительных значений, вызванных прочими переходными процессами. Такие схемы могут быть разработаны на основании экспериментов для оценки изменений емкостного сопротивления между электродами 174 и 175, вызванных различными вероятными переходными процессами, не свидетельствующими о наличии объектов и посторонних лиц рядом с каталитическим нейтрализатором 171.
Как показано на Фиг. 6, система 170 защиты дополнительно может использовать подсистему для защиты источника питания 179, электрически подключенного к контроллеру 177 и элементу 180 сигнализации. В частности, система 170 может включать в себя электроды 181 и 182, расположенные рядом с источником 179 питания. Данные электроды 181 и 182 могут быть расположены рядом с двумя противоположными сторонами источника 179 питания, как и электроды 174 и 175, расположенные с левой и правой сторон 172а и 172b (или с передней и задней частей 176а и 176b) каталитического нейтрализатора 171. Когда электроды 181 и 182 системы 170 расположены рядом с источником 179 питания, контроллер 177 может также следить за изменениями емкостного сопротивления между электродами 181 и 182 для обнаружения перемещения посторонних лиц и объектов рядом с источником 179 питания. Описанные ранее схемы для ложных положительных сигналов и обнаружения посторонних лиц и объектов рядом с каталитическим нейтрализатором 171 могут быть использованы для обнаружения таких посторонних лиц и объектов рядом с источником 179 питания. Также элемент 180 сигнализации (например, гудок, сирена или иное устройство сигнализации) может быть расположен внутри зоны обнаружения электродов 81 и 82 или внутри зоны, образованной электродами 174 и 175. Это позволит обеспечить защиту от вмешательства в элемент 180 сигнализации.
В соответствии с вариантами осуществления, изображенными на Фиг. 7А-7С, система 190 защиты каталитических нейтрализаторов, основанная на обнаружении присутствия, может быть использована для обнаружения наличия объектов и посторонних лиц рядом с блоком каталитических нейтрализаторов (т.е. каталитических нейтрализаторов 171а, 171b, 171с, 171d и т.д.), установленных в конкретном транспортном средстве 173 и подключенных к выпускной системе (не показана) двигателя 192. Компоненты и схемы обнаружения, используемые системой 190 защиты с Фиг. 7А-7С, практически идентичны компонентам и схемам для системы 170 защиты (см. Фиг.6). Например, контроллер 177 использует пару электродов 174 и 175 для обнаружения изменений емкостного сопротивления, вызванных наличием объектов и посторонних лиц рядом с одним или более каталитических нейтрализаторов 171а, 171b, 171с и 171d. Большая площадь, охватываемая электродами 174 и 175, используемыми системой 190 защиты каталитических нейтрализаторов, основанной на обнаружении присутствия, может снизить стоимость систем, основанных на измерении сопротивления (см. патентную заявку США № 13/726,441, включенную в настоящий документ посредством ссылки), используемых в транспортных средствах с несколькими каталитическими нейтрализаторами. Это связано с тем, что системы, основанные на измерении сопротивления, в основном, требуют использования нескольких резистивных элементов и цепей контроля для каждого каталитического нейтрализатора.
В системе 190 электроды 174 и 175 могут быть расположены вдоль левой и правой сторон транспортного средства 173 а и 173b соответственно. Кроме того, электрод 174 может находиться рядом с левой стороной самых левых каталитических нейтрализаторов 171 а и 171с в транспортном средстве 173 (см. Фиг. 7С). Аналогичным образом электрод 175 может находиться рядом с правой стороной самых правых каталитических нейтрализаторов 171b и 171d в транспортном средстве 173 (см. Фиг. 7С). Вообще целью настоящего изобретения является использование электродов 174 и 175 таким образом, чтобы область между ними эффективно охватывала все каталитические нейтрализаторы 171а, 171b, 171с и 171d. Например, электроды 174 и 175 могут также быть установлены рядом с передней и задней частями 178а и 178b транспортного средства 173 для охвата всех каталитических нейтрализаторов 171а, 171b, 171с и 171d. Следовательно, система 190 защиты может использовать электроды 174 и 175 для обнаружения изменений емкостного сопротивления, вызванных движением рядом с любым из каталитических нейтрализаторов 171а, 171b, 171с и (или) 171d, установленных в транспортном средстве 173. Кроме того, элемент 180 сигнализации может быть расположен в зоне обнаружения у электродов 174 и 175, обеспечивая защиту от вмешательства в элемент 180 сигнализации.
В соответствии с другим вариантом осуществления, показанном на Фиг. 8 и 8А, система 200 безопасности зарядного устройства может быть использована для того, чтобы свести к минимуму воздействие электромагнитного поля на посторонние объекты и живые организмы в непосредственной близости от электрического транспортного средства 201 с приводом от аккумулятора, создающегося во время зарядки его аккумуляторов 206. Изображенное транспортное средство 201 может включать в себя рекуперативную тормозную систему 202, соединенную с электродвигателем 204. Аккумуляторы 206 установлены в транспортном средстве 201 таким образом, чтобы подавать питание на электродвигатель 204. Кроме того, транспортное средство 201 может представлять собой транспортное средство с электрической движительной системой, имеющей аккумулятор 206. Аккумуляторы 206 обычно включают в себя набор перезаряжаемых аккумуляторов, используемых для подачи питания на транспортное средство 201. Также для зарядки аккумуляторов 206 может быть использован разъем 208 зарядного устройства через внешнее проводное соединение (например, внешний зарядный штепсель 120В или 220 В) с транспортным средством 201.
Система 200 включает в себя аккумуляторы 206, область 210 зарядного устройства и приемник 214 беспроводного зарядного устройства. Приемник 214 беспроводного зарядного устройства принимает и фильтрует электрические сигналы (например, электромагнитное поле, которое может нести или не нести информацию) в области 210 зарядного устройства, генерируемые станцией беспроводной зарядки (внешней) 212 для того, чтобы заряжать аккумуляторы 206. Таким образом, приемник 214 беспроводного зарядного устройства обеспечивает альтернативу для заряжаемых аккумуляторов 206, которые обеспечивают работу транспортного средства 201. Приемник 214 беспроводного зарядного устройства может быть соединен с аккумуляторами 206 с помощью провода 215. Станция 212 беспроводной зарядки, находящаяся снаружи транспортного средства 201, может быть использована для создания электромагнитного поля и (или) других электрических сигналов в приемнике 214 беспроводного зарядного устройства, например, с помощью индукции. Электромагнитное поле, создаваемое станцией 212 беспроводной зарядки, или любое дополнительное электромагнитное поле и (или) другие электрические сигналы, генерируемые приемником 214 беспроводного зарядного устройства, могут определять границы области 210 зарядного устройства, как показано на Фиг. 8 и 8А. В зависимости от формы катушек в станции 212 зарядки и приемнике 214 область 210 зарядного устройства может представлять собой прямоугольник, овал, круг или другую аналогичную форму. Данная область 210 зарядного устройства, распложенная в непосредственной близости от приемника 214 беспроводного зарядного устройства и станции 212. Посторонние объекты (например, металлические инструменты, монеты и иные железные и нежелезные объекты, включая объекты, чувствительные к воздействию электромагнитного поля) и живые организмы (например, пешеходы, пассажиры транспортного средства, лица, находящиеся рядом с транспортным средством 201, дикие или домашние животные) в области 210 обнаружения зарядного устройства во время работы приемника 214 беспроводного зарядного устройства и станции 212 могут подвергаться разным уровням воздействия электромагнитного поля.
Система 200 безопасности зарядного устройства также включает в себя пару датчиков 216, расположенных рядом с областью 210 зарядного устройства. Датчики 216 предназначены для обнаружения наличия посторонних объектов и живых организмов рядом с областью 210 зарядного устройства, как показано на Фиг. 8 и 8А, при этом один датчик 216 расположен на левой стороне транспортного средства 201, а другой датчик 216 расположен на правой стороне транспортного средства 201, оба датчика 216 расположены в непосредственной близости от внешних границ области 210 зарядного устройства. Следует понимать, что датчики 216 могут быть расположены в разных местах внутри или на поверхности транспортного средства 201, обеспечивая обнаружение наличия посторонних объектов и живых организмов рядом с областью 210 зарядного устройства. Также следует понимать, что рядом с областью 210 зарядного устройства может быть установлено любое количество датчиков 216, расположенных в любой конфигурации, в зависимости от типов датчиков, используемых в системе 200, необходимой чувствительности, формы катушки зарядного устройства в станции 212 беспроводной зарядки и прочих факторов, связанных с конструкцией транспортного средства, включая стоимость, экономичность расхода топлива и ограниченность пространства. Необходимо понимать, что датчики, используемые в транспортном средстве 201 для других датчиков (например, датчики присутствия, предназначенные для включения подъемных ворот), могут быть использованы в системе 200 в качестве датчиков 216.
Датчики 216 также могут представлять собой микропроцессор (не показан), который, например, будет оценивать уровни емкостного сопротивления между датчиками. Данные уровни емкостного сопротивления изменяются в виде функции зависимости от наличия посторонних объектов и живых организмов рядом с областью 210 зарядного устройства. Другие данные, предоставляемые датчиками 216 (в зависимости от типа датчиков, используемых в качестве датчиков 216), могут быть использованы для определения наличия данных объектов и живых организмов. Например, для данных целей в качестве датчиков 216 могут использоваться инфракрасные, температурные, вибрационные и другие типы датчиков присутствия. Таким образом, датчики 216 могут быть сконфигурированы таким образом, чтобы определять наличие посторонних объектов и живых организмов в непосредственной близости от области 210 зарядного устройства.
Система 200 безопасности зарядного устройства также включает в себя контроллер 217. Контроллер может быть соединен с датчиками 216 с помощью проводов 218 датчика. Контроллер 217 также может быть соединен с приемником 214 беспроводного зарядного устройства с помощью схемы 219 управления. Контроллер 217 может быть сконфигурирован таким образом, чтобы управлять приемником 214 беспроводного зарядного устройства с помощью схемы 219 управления, по крайней мере, на основе данных, поступающих от датчиков 216 по проводам 218 датчика. Таким образом, контроллер 217 может работать напрямую на основе данных и расчетных значений, поступающих от датчиков 216. В качестве альтернативы контроллер 217 может включать в себя микропроцессоры (не показаны) и другие соответствующие компоненты, предназначенные для оценки наличия посторонних объектов и живых организмов рядом с областью 210 зарядного устройства, по крайней мере частично, на основе данных, принятых от датчиков 216. Затем контроллер 217 управлять приемником 214 беспроводного зарядного устройства для того, чтобы, по крайней мере, ослабить электрический сигнал в области 210 зарядного устройства при обнаружении объектов или живых организмов рядом с областью 210 зарядного устройства. Контроллер 217 также может отключать подачу данного электрического сигнала в области 210 зарядного устройства в ответ на обнаружение данных объектов и (или) живых организмов. Контроллер 217 может также содержать инструкции для станции 212 зарядки для снижения уровня или блокировки подачи сигналов передатчика по низкочастотным (LF) или радиочастотным (RF) каналам связи между приемником в станции 212 зарядки и приемными катушками в приемнике 214 беспроводного зарядного устройства. В других конфигурациях контроллер 217 может выполнить отключение или снижение уровня мощности передатчика в станции 212 зарядки с помощью дистанционной системы ввода транспортного средства 201 (не показана) для передачи таких инструкций, телематических средств связи (не показаны) или других средств беспроводной связи. Таким образом, контроллер 217 может быть использован для того, чтобы свести к минимуму или исключить воздействие электромагнитного поля на такие объекты и живые организмы для повышения уровня безопасности.
Как показано на Фиг. 8 и 8А, контроллер 217, используемый в системе 200 безопасности зарядного устройства, может быть соединен с элементом 220 сигнализации. При обнаружении посторонних объектов или живых организмов рядом с областью 210 зарядного устройства контроллер 217 может активировать элемент 220 сигнализации для выдачи сигналов о наличии таких объектов и (или) живых организмов. Например, элемент 220 сигнализации может представлять собой клаксон, сирену, визуальный индикатор или другое сигнальное устройство. При включении элемент 220 сигнализации может отпугнуть живых организмов, чтобы они не подходили или не оставались рядом с областью 210 зарядного устройства во время работы станции 212 зарядки и приемника 214 беспроводного зарядного устройства. В целях безопасности элемент 220 сигнализации также может предотвратить установку посторонних объектов рядом с областью 210 зарядного устройства посторонними лицами. Например, на металлический инструмент, находящийся рядом с областью 210 зарядного устройства во время работы станции 212 зарядки и приемника 214-беспроводного зарядного устройства, может действовать сильная энергия от электромагнитного поля, создаваемого при беспроводной зарядке, которое связано с заряжаемыми аккумуляторами 206 в транспортном средстве 201. Энергия может привести к нагреву металлического инструмента, что представляет собой угрозу для лиц, находящихся рядом с транспортным средством 201.
Также контроллер 217 может быть запрограммирован таким образом, чтобы выключать элемент 220 сигнализации по истечении предварительно установленного времени, в течение которого посторонний объект находился рядом с областью 210 зарядного устройства (например, алюминиевая банка рядом с областью 210 зарядного устройства). Данный принцип работы контроллера 217 для выключения устройства 220 сигнализации позволяет сохранить заряд и (или) срок службы аккумуляторы 206. Кроме того, контроллер 217 может уведомлять владельца, например, владельца транспортного средства 201, о снижении уровня или прекращении подачи сигналов зарядки в области 210 зарядного устройства по беспроводному каналу связи с помощью телематических устройств, Wi-Fi-устройств, Bluetooth-устройств, двунаправленных средств удаленного ввода или других беспроводных средств. Затем контроллер 217 может уведомлять данное лицо о слишком большой продолжительности зарядки, вызванной прекращением подачи или снижении уровня электрических сигналов в области 210 зарядного устройства.
На Фиг. 9 изображена комбинированная система 250 защиты и безопасности транспортного средства в соответствии с другим вариантом осуществления. Комбинированная система 250 может быть использована для того, чтобы свести к минимуму воздействие электромагнитного поля на посторонние объекты и живые организмы, находящиеся в непосредственной близости от гибридного автомобиля с подзарядкой от электросети, электрического транспортного средства 201а с приводом от аккумулятора. Такое электромагнитное поле может быть создано в области 210 зарядного устройства во время зарядки аккумуляторов 206в транспортном средстве 201а. Транспортное средство 201а включает в себя рекуперативную тормозную систему 202, соединенную с электродвигателем 204. Аккумуляторы 206 установлены в транспортном средством 201а для того, чтобы подавать питание на электродвигатель 204. Также разъем 208 зарядного устройства может быть использован для зарядки аккумуляторов 206 через внешнее проводное соединение (например, внешний зарядный штепсель 120В или 220В) с транспортным средством 201а (не показано).
Как показано на Фиг. 9, комбинированная система 250 защиты и безопасности транспортного средства работает так же, как и система 200 безопасности (см. Фиг. 8, 8А) для того, чтобы свести к минимуму или исключить воздействие электромагнитного поля на посторонние объекты и живые организмы, находящиеся рядом с областью 210 зарядного устройства транспортного средства 201 а. Если не указано иное, компоненты комбинированной системы 250 защиты, изображенной на Фиг. 9, и системы 200 безопасности, изображенной на Фиг. 8, 8А, которые имеют одинаковые ссылочные позиции, являются аналогичными и работают примерно одинаково. Например, датчики 216 системы 250 могут быть установлены для обнаружения наличия посторонних объектов и живых организмов рядом с областью 210 зарядного устройства транспортного средства 201а.
Кроме того, транспортное средство 201а включает в себя двигатель 222 внутреннего сгорания, который может быть соединен с рекуперативной тормозной системой 202, как показано на Фиг. 9. Двигатель 222 внутреннего сгорания также соединен с выпускной системой 225, которая включает в себя элементы 224 каталитических нейтрализаторов. Следует отметить, что некоторые конфигурации транспортного средства 201а имеют один элемент 224 каталитического нейтрализатора или более двух элементов 224 каталитических нейтрализаторов. Также датчики 216 могут расположены внутри транспортного средства 201а рядом с элементами 224 каталитических нейтрализаторов в продольном направлении (см. Фиг. 9). Датчики 216 также могут быть установлены таким образом, чтобы точно следовать контуру зарядного устройства (например, системы 200 с Фиг. 8, 8А) комбинированной системы защиты и безопасности (например, системы 250, включающей в себя элементы 224 нейтрализатора) в транспортных средствах 201, 201a. Следовательно, комбинированная система 250 защиты и безопасности может быть использована для снижения вероятности или предотвращения кражи или вмешательства в элементы 224 каталитических нейтрализаторов. В данном случае работа комбинированной системы 250 основана на использовании датчиков 216 для обнаружения наличия объектов или посторонних лиц рядом с элементами 224 каталитических нейтрализаторов. Контроллер 217 также может использовать данные от датчиков 216 для оценки наличия таких объектов и живых организмов и активировать элемент 220 сигнализации в ответ на такие условия. Технологии и подходы, описанные ранее со ссылкой на системы 170 (см. Фиг. 6) и 190 (см. Фиг. 7А-7С), могут быть реализованы с помощью комбинированной системы 250 защиты и безопасности с Фиг. 9.
Как показано на Фиг. 9, один датчик 216 расположен на левой стороне транспортного средства 201 а, а другой датчик 216 расположен на правой стороне транспортного средства 201 а, оба датчика 216 расположены в непосредственной близости от внешних границ области 210 зарядного устройства. Также датчики 216 расположены рядом с элементами 224 каталитических нейтрализаторов. Однако необходимо понимать, что датчики 216 могут быть расположены в других местах внутри или на транспортном средстве 201 а для обнаружения наличия посторонних объектов и живых организмов рядом с областью 210 зарядного устройства и элементов 224 каталитических нейтрализаторов. Следует понимать, что рядом с областью 210 зарядного устройства и (или) элементами 224 каталитических нейтрализаторов может быть расположено любое количество датчиков 216 в зависимости от типов датчиков, используемых в системе 250, необходимой чувствительности и других факторов, связанных с конструкцией транспортного средства 201а (например, от стоимости, экономичности расхода топлива, ограниченности пространства и т.д.).
На Фиг. 10А изображена система 260 безопасности, которая использует пару датчиков 256а, 256b с кольцевым расположением в соответствии с другим вариантом осуществления. Если не указано иное, система 260 безопасности работает аналогичным образом и использует компоненты с аналогичными ссылочными позициями, что и система 200 (см. Фиг. 8, 8А). Однако в системе 260 датчики 216 заменяются внутренним кольцом датчиков 256а и внешним кольцом датчиков 256b, оба из которых расположены рядом с областью 210 зарядного устройства и соединены с контроллером 217. Датчики 256а и 256b, использованные в системе 260 безопасности, могут более эффективно обнаруживать наличие посторонних объектов и живых организмов рядом с областью 210 зарядного устройства по сравнению с датчиками 216, использующими системами 200 и 250 (см. Фиг. 8, 8А и 9). С другой стороны, датчики 256а и 256b, изображенные на Фиг.10А, имеют большую поверхность по сравнению с датчиками 216, что требует большего пространства, и больший вес - показатели, являющиеся нежелательными для некоторых транспортных средств. Кроме того, при использовании датчиков 256а и 256b в системе 260 безопасности, аналогичной комбинированной системе 250 (см. Фиг. 9), они не могут одновременно выполнять обнаружение посторонних объектов и живых организмов рядом с областью 210 и каталитическими нейтрализаторами 224 зарядного устройства (см. Фиг.9). Другой набор датчиков 256а и 256b (или аналогичные датчики) нужно будет установить рядом с каталитическими нейтрализаторами 224 и соединить их с контроллером 217 для выполнения данной цели.
Также следует понимать, что различные датчики 216, 256а, 256b и т.д. могут быть использованы в системах 200, 250 и 260 (см. Фиг. 8, 8А, 9 и 10А) для обнаружения посторонних объектов и живых организмов рядом с областью 210 зарядного устройства, элементами 224 каталитических нейтрализаторов и (или) другими компонентами транспортного средства на основе их расположения внутри транспортных средств 201, 201а. Для выполнения данных функций можно использовать другие количества и схемы расположения датчиков 216, 256а, 256b в транспортных средствах 201, 201a. Кроме того, для создания большего покрытия области 210 зарядного устройства и дополнительной чувствительности в транспортных средствах 201, 201a могут быть расположены дополнительные количества и размеры датчиков, аналогичные датчикам 216, 256а и 256b. Ограничения, касающиеся размеров и веса транспортного средства 201, 201a и связанные с датчиками 216, 256а, 256b и т.д., могут быть скомпенсированы необходимостью для точного определения посторонних объектов и живых организмов рядом с областью 210 зарядного устройства, элементами 224 каталитических нейтрализаторов и другими компонентами транспортного средства.
На Фиг. 10В показана система 280 безопасности зарядного устройства, сконфигурированная таким образом, чтобы фильтровать сигналы переходных условий, не относящиеся к наличию посторонних объектов и живых организмов рядом с областью 210 зарядного устройства, в соответствии с другим вариантом осуществления. Как показано, система 280 безопасности может быть использована в транспортном средстве 201, аналогичная системе 200 с Фиг. 8. В частности, система 280 безопасности включает в себя датчики 216 с конфигурацией, аналогичной конфигурации датчиков 216, показанных вместе с системой 200 (см. Фиг. 8). Однако система 280 также включает в себя датчик 270 опорного значения, соединенный с контроллером 217 с помощью проводов 268 датчика опорного значения. Следует понимать, что система 280 (включая датчик 270 опорного значения) также может быть использована в транспортном средстве 201а, использующем систему, аналогичную комбинированной системе 250, изображенной на Фиг.9, с датчиками 216, расположенными рядом с областью 210 зарядного устройства и каталитическими нейтрализаторами 224.
Система 280 безопасности может работать на основе данных, получаемых от датчика 270 опорного значения и датчиков 216 для фильтрации переходных условий, не относящихся к наличию посторонних объектов и живых организмов рядом с областью 210 зарядного устройства и (или) элементов 224 каталитических нейтрализаторов (см. Фиг. 9). В частности, контроллер 217 может работать на основе комбинированных данных, получаемых датчиком 270 опорного значения и датчиками 216 для данной цели. Транспортные средства 201, 201a, например, могут двигаться из-за порывов ветра (например, транспортное средство может наклоняться по часовой стрелке или против часовой стрелки вокруг продольной оси), что приведет к небольшим изменениям данных, получаемых датчиками 216 (например, уровней емкостного сопротивления).
Например, движение транспортных средств 201, 201a, вызванное порывами ветра, может немного изменять расстояние между датчиками 216, что приведет к изменению уровня емкостного сопротивления, измеренного датчиками 216. Однако контроллер 217 может работать на основе дополнительных данных от датчика 270 опорного значения для фильтрации таких переходных условий. Может произойти так, что движение транспортных средств 201, 201a, вызванное порывами ветра, изменит уровни емкостного сопротивления между датчиками 216, оказывая меньшее воздействие на емкостное сопротивление между датчиком 270 опорного значения и одного из датчиков 216. Другие переходные условия, которые могут быть отфильтрованы системой 280 (или другой системой защиты и безопасности, основанной на концепции системы 280), включают в себя перемещение веток, песка, мусора и других объектов рядом с областью 210 зарядного устройства, не чувствительных к воздействию электромагнитного поля и (или) не относящихся к защите отдельных компонентов транспортного средства (например, элементов 224 каталитических нейтрализаторов, изображенных на Фиг. 9).
С помощью алгоритмов и предварительно установленных соотношений, связанных с определенной геометрической формой транспортных средств 201, 201a, датчика 270 опорного значения и датчиков 216, данный контроллер 217 может различать переходные условия и наличие посторонних объектов и живых организмов рядом с областью 210 зарядного устройства и (или) каталитическими нейтрализаторами 224. Кроме того, предварительно установленные соотношения и алгоритмы в виде функции от времени могут быть записаны в контроллере 217 для того, чтобы учитывать другие известные переходные условия, не относящиеся к наличию посторонних объектов и живых организмов, обнаруженных системой 280. Система 280 и контроллер 217, например, могут быть сконфигурированы таким образом, чтобы защитить домашних животных (например, собак и кошек) от воздействия электромагнитного поля, не реагируя при этом на движение или наличие насекомых рядом с областью 210 зарядного устройства. Создание подобных программ контроллера 217 может быть основано на изначальном понимании различных сигналов, измеренных датчиком 270 опорного значения и датчиками 216 в ответ на наличие домашних животных, насекомых и других объектов, которые могут попасть в области 210 обнаружения зарядного устройства.
В описанные выше конструкции могут быть внесены изменения и модификации без выхода за рамки концепции изобретения.
Изобретение относится к беспроводным зарядным системам транспортных средств и может быть использовано для подзарядки аккумулятора в гибридных и электрических транспортных средствах. Зарядная система для транспортного средства с приводом от аккумулятора включает в себя бортовой аккумулятор, область зарядного устройства и беспроводное зарядное устройство для генерирования электрического сигнала зарядки в области зарядного устройства для зарядки аккумулятора, а также множество датчиков, расположенных таким образом, чтобы обнаруживать посторонние объекты и живые организмы рядом с областью зарядного устройства. Система также включает в себя контроллер, выполненный с возможностью установления отличия между переходными условиями и наличием живых существ вблизи области зарядного устройства и только прекращения подачи сигнала зарядки, когда вблизи области зарядного устройства находится живое существо. Технический результат – снижение воздействия электрических сигналов, создаваемых зарядными системами на живые существа, находящиеся рядом с такими системами. 4 н. и 9 з.п. ф-лы, 14 ил.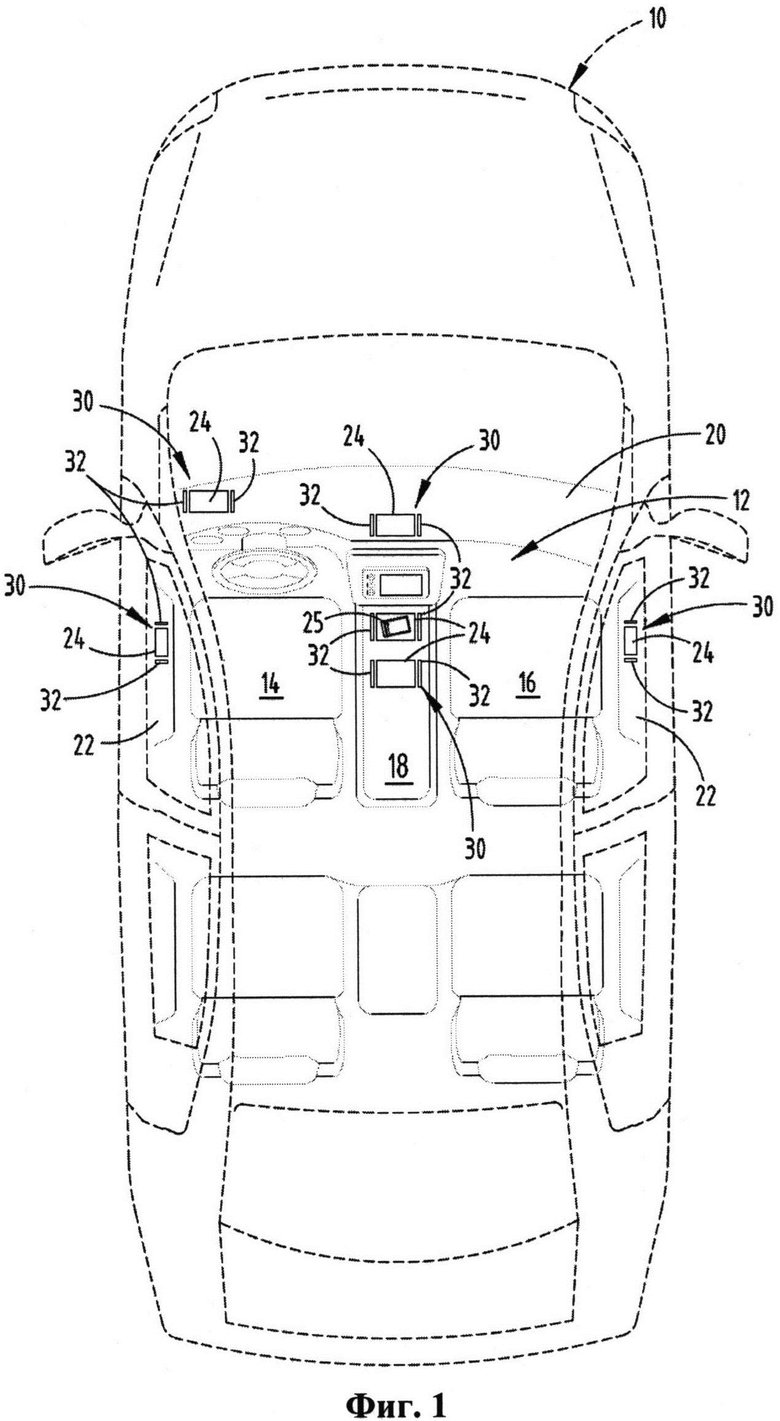
1. Зарядная система для транспортного средства с приводом от аккумулятора, содержащая:
бортовой аккумулятор,
область зарядного устройства,
беспроводное зарядное устройство для генерирования электрического сигнала зарядки в области зарядного устройства для зарядки аккумулятора,
множество датчиков, расположенных таким образом, чтобы обнаруживать живые существа вблизи области зарядного устройства, и
контроллер, выполненный с возможностью установления отличия между переходными условиями и наличием живых существ вблизи области зарядного устройства и только прекращения подачи сигнала зарядки, когда вблизи области зарядного устройства находится живое существо.
2. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью включения сигнализации при обнаружении живого существа вблизи области зарядного устройства.
3. Система по п. 1, в которой множество датчиков выполнено с возможностью генерирования данных о емкостном сопротивлении для обнаружения живых существ вблизи области зарядного устройства.
4. Система по п. 1, в которой множество датчиков соединено с контроллером, который оценивает наличие живых существ вблизи области зарядного устройства на основе, по меньшей мере, частично, входных данных от датчиков.
5. Система по п. 4, в которой множество датчиков включает в себя эталонный датчик.
6. Зарядная система для транспортного средства, содержащая:
аккумулятор,
область зарядного устройства,
беспроводное зарядное устройство для генерирования электрического сигнала зарядки в области зарядного устройства для зарядки аккумулятора,
множество датчиков, расположенных таким образом, чтобы обнаруживать посторонние объекты и живые существа вблизи области зарядного устройства, причем множество датчиков включает в себя эталонный датчик, и
контроллер, выполненный с возможностью управления зарядным устройством для, по меньшей мере, понижения уровня сигнала зарядки, когда вблизи области зарядного устройства находится посторонний объект или живое существо, при этом контроллер дополнительно выполнен с возможностью фильтрации переходных условий, не относящихся к наличию посторонних объектов и живых существ вблизи области зарядного устройства, на основе, по меньшей мере, частично, входных данных от датчиков.
7. Система по п. 6, в которой переходные условия включают в себя движение транспортного средства.
8. Зарядная система для транспортного средства с приводом от аккумулятора, содержащая:
бортовой аккумулятор,
беспроводное зарядное устройство для генерирования электрического сигнала зарядки в области зарядного устройства для зарядки аккумулятора,
множество емкостных датчиков, расположенных таким образом, чтобы обнаруживать живые существа вблизи области зарядного устройства, и
контроллер, соединенный с указанными датчиками и выполненный с возможностью установления отличия между переходными условиями и наличием живых существ вблизи области зарядного устройства и только прекращения подачи сигнала зарядки, когда вблизи области зарядного устройства находится живое существо.
9. Система по п. 8, в которой контроллер дополнительно выполнен с возможностью включения сигнализации при обнаружении живого существа вблизи области зарядного устройства.
10. Система по п. 8, в которой контроллер оценивает наличие живых существ вблизи области зарядного устройства на основе, по меньшей мере, частично, входных данных от датчиков.
11. Система по п. 10, в которой множество датчиков включает в себя эталонный датчик.
12. Зарядная система для транспортного средства, содержащая:
аккумулятор,
область зарядного устройства,
беспроводное зарядное устройство для генерирования электрического сигнала зарядки в области зарядного устройства для зарядки аккумулятора,
множество емкостных датчиков, расположенных таким образом, чтобы обнаруживать посторонние объекты и живые существа вблизи области зарядного устройства, и
контроллер, соединенный с указанными датчиками и выполненный с возможностью оценки наличия посторонних объектов или живых существ вблизи области зарядного устройства, при этом контроллер дополнительно выполнен с возможностью фильтрации переходных условий, не относящихся к наличию посторонних объектов и живых существ вблизи области зарядного устройства, на основе, по меньшей мере, частично, входных данных от датчиков.
13. Система по п. 12, в которой переходные условия включают в себя движение транспортного средства.
| US 2010117596 A1, 13.03.2010 | |||
| US 2012126745 A1, 24.05.2012 | |||
| US 2006167595 A1, 27.07.2006 | |||
| US 8102147 B2, 24.01.2012 | |||
| БЕСПРОВОДНАЯ ЗАРЯДНАЯ СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2006 |
|
RU2306653C1 |

