Настоящее изобретение относится к автономной подводной системе для непрерывного длительного широкодиапазонного мониторинга окружающей среды на месте эксплуатации, в частности для измерения параметров окружающей среды вблизи морского дна и на различной глубине в толще воды.
Измерение параметров в подводной окружающей среде особенно важно, прежде всего, вблизи областей риска, таких как области добычи нефти.
Для мониторинга окружающей среды в море традиционно проводят периодические измерительные кампании с развертыванием измерительных средств и сбором образцов для последующего лабораторного анализа. Этого явно недостаточно для обеспечения полного понимания динамики происходящих явлений, и данный подход не позволяет вовремя обнаружить возникновение аномальных событий.
Когда требуются непрерывные наблюдения, используются постоянные подводные обсерватории, которые с помощью соответствующих измерительных средств собирают данные об окружающей среде.
Этот точный подход полезен для мониторинга параметров, относящихся к долговременным явлениям в окружающей среде, таким как землетрясения, цунами, вулканическая активность, но не может быть легко использован для широкодиапазонного мониторинга.
Для преодоления этого недостатка все более широко используются автономные подводные транспортные средства (AUV, Autonomous Underwater Vehicle).
Такие транспортные средства в общем случае оборудованы приводными системами продвижения для обеспечения подводного перемещения и различными измерительными средствами для сбора данных, относящихся к подводной окружающей среде.
При соответствующем программировании автономные подводные транспортные средства позволяют проводить подводные исследования в заранее заданных областях в течение нескольких часов без вмешательства человека.
Однако, продолжительность этих исследовательских кампаний зависит от запаса энергии автономного транспортного средства, которое по окончании любого исследования должно достичь базы, чтобы выгрузить собранную информацию и зарядить источники питания.
Такие базы или станции обычно расположены на поверхности для облегчения работы человека, в частности для более простого управления временным хранением данных, реконфигурацией и зарядкой транспортного средства.
Также известны подводные станции, которые позволяют управлять транспортным средством под водой.
В частности, эти станции обеспечивают зарядку транспортного средства, его реконфигурацию для последующего исследования и выгрузку/загрузку данных, собранных бортовыми измерительными средствами.
Такая технология привела к повышению степени автономности транспортных средств, которые благодаря этому способны продолжать исследовать морское дно теоретически в течение неопределенного времени.
В заявке на патент США 2009/0095209 описана подводная станция, оборудованная средствами для приема подводного транспортного средства, зарядки его аккумуляторов и обмена с ним информацией.
Это решение обеспечивает проведение длительных исследований полностью под водой.
Другой пример подводной станции для подводных транспортных средств представлен в заявке на патент США 2009/0114140, где описана система для поддержки операций под водой. Эта система обеспечивает управление подводными транспортными средствами, дистанционно-управляемыми транспортными средствами (ROV, Remotely Operated Vehicle) и гибридными дистанционно-управляемыми транспортными средствами (HROV, Hybrid Remotely Operated Vehicle) с точки зрения обеспечения их энергией, осуществления с ними связи и их технического обслуживания.
В частности, когда эти транспортные средства входят в контакт с указанной системой, они могут принимать энергию для проведения исследований, осуществлять обмен информацией, то есть данными, собранными бортовыми измерительными средствами, и проходить техническое обслуживание.
Однако эта система, так же как и другие известные технологии, не позволяет адаптировать исследовательские задачи транспортного средства к конкретным требованиям момента времени и, в частности, не позволяет реконфигурировать измерительное оборудование транспортного средства под водой.
Этот аспект требует, чтобы для каждого типа исследований имелись заранее оборудованные для данного конкретного случая транспортные средства.
Отсутствие гибкости известных способов и систем ограничивает использование автономных исследовательских устройств под водой.
Заявитель обнаружил, что при использовании подводных станций для зарядки их энергией и осуществления связи с этими транспортными средствами, потребность в создании независимых и автономных систем, способных к осуществлению долговременных и широкодиапазонных подводных исследовательских кампаний, может быть удовлетворена только частично.
Известно также использование автономных подводных транспортных средств, изготовленных из модулей, что обеспечивает определенную гибкость при настройке транспортного средства. Эта технология обеспечивает создание подводных транспортных средств, которые могут удовлетворить различным действующим техническим требованиям.
Например, в документе WO 03/059734 описано автономное подводное транспортное средство, изготовленное из механических модулей, которые при объединении друг с другом формируют подводное транспортное средство, которое удовлетворяет конкретным исследовательским требованиям момента времени.
В этом случае сборку различных модулей с формированием подводного транспортного средства производят вручную на открытом воздухе, а не под водой.
При использовании автономных подводных транспортных средств, известных в настоящее время, своевременная и автономная замена модулей в подводных транспортных средствах непосредственно под водой невозможна. Необходимость всплытия из глубины подводных транспортных средств для добавления или модификации бортовых измерительных средств приводит к значительным потерям времени, что сильно ограничивает эксплуатационную гибкость таких систем.
Поэтому предлагается автономное подводное транспортное средство, способное вмещать один или более внешних измерительных модулей, которые можно заменять прямо на месте эксплуатации без ручного вмешательства оператора, что обеспечивает возможность полной адаптации указанных средств к конкретным исследовательским требованиям момента времени.
Цель настоящего изобретения состоит в преодолении указанных выше недостатков и, в частности, в создании автономной подводной системы для проведения на месте эксплуатации длительного непрерывного мониторинга с измерением широкого диапазона параметров, относящихся к морской среде, содержащей многофункциональную подводную станцию и по меньшей мере одно автономное подводное транспортное средство, которые взаимодействуют, обеспечивая проведение различных видов исследований окружающей среды.
В частности, изобретение используется для мониторинга воздействия на окружающую среду деятельности в прибрежной области, характеристики новых местонахождений, поддержки мероприятий в загрязненных областях, контроля целостности конструкций, установленных под водой, и проверки возможного вмешательства третьих лиц в область, где производится мониторинг.
Другой целью настоящего изобретения является создание автономного подводного транспортного средства для различных видов исследований окружающей среды, которое может использовать внешние измерительные модули, которые могут быть соединены с главным телом транспортного средства.
Еще одной целью настоящего изобретения является создание многофункциональной подводной станции, оборудованной средствами для выполнения различных типов исследований окружающей среды.
Еще одной целью настоящего изобретения является создание многофункциональной подводной станции, оборудованной средствами для оснащения автономных модульных подводных транспортных средств и управления ими.
Еще одной целью настоящего изобретения является создание способа для четырехмерного мониторинга окружающей среды, позволяющего собирать данные во времени по трем пространственным координатам.
Эти и другие цели настоящего изобретения достигаются в автономной подводной системе для четырехмерного мониторинга окружающей среды, охарактеризованной в пп.1, 18 и 40 формулы изобретения.
Другие характеристики автономной подводной системы для четырехмерного мониторинга окружающей среды раскрыты в зависимых пунктах формулы изобретения.
Характеристики и преимущества автономной подводной системы для четырехмерного мониторинга окружающей среды согласно настоящему изобретению станут более понятными из описания, приведенного для иллюстрации, но не для ограничения изобретения, со ссылками на приложенные чертежи.
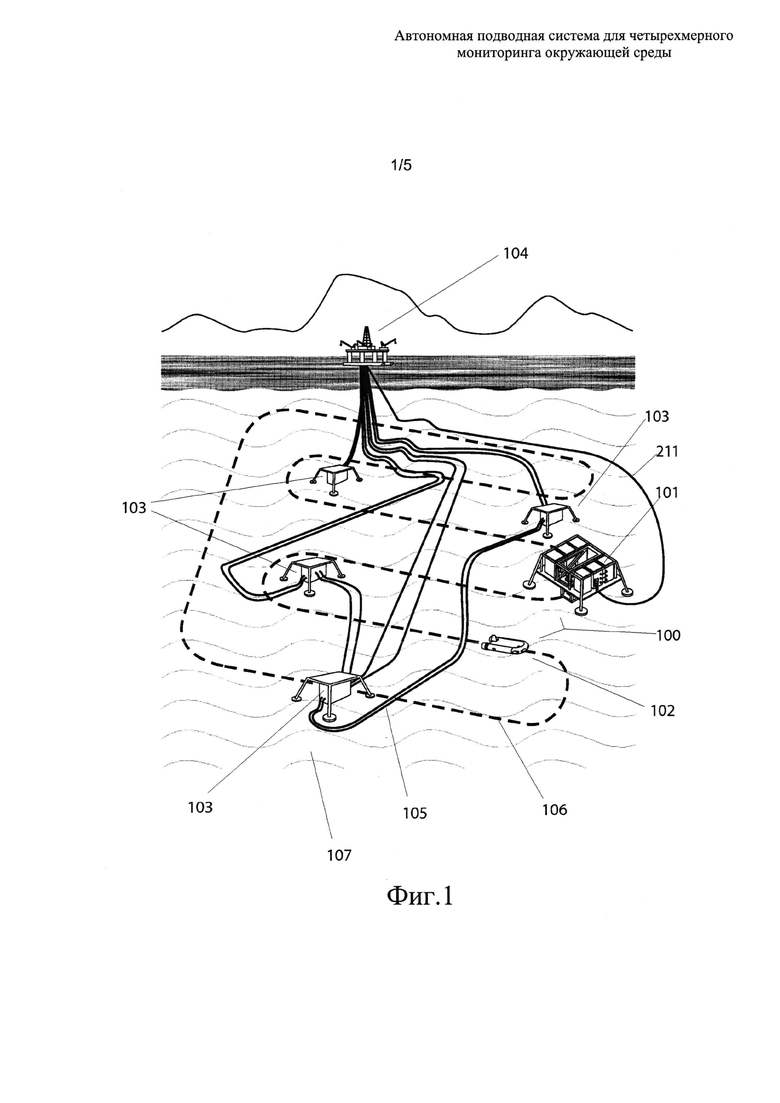
На фиг.1 схематично представлен предпочтительный вариант выполнения автономной подводной системы для четырехмерного мониторинга окружающей среды согласно настоящему изобретению.
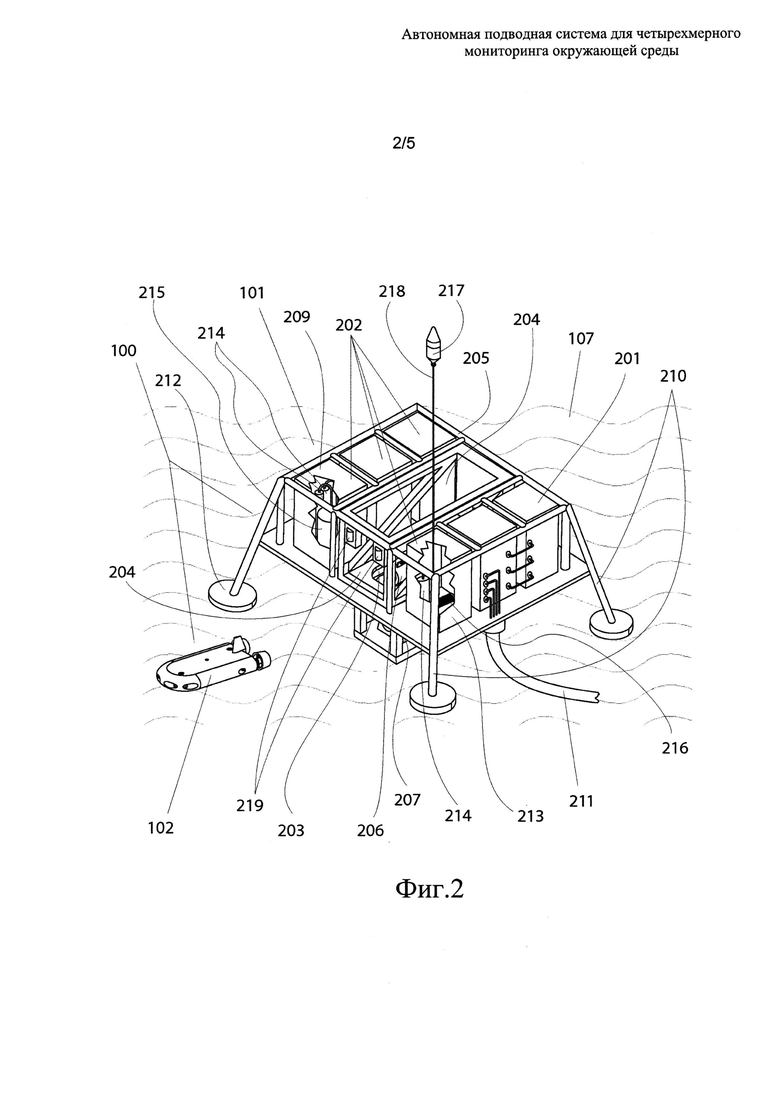
На фиг.2 показан вид в перспективе предпочтительного варианта выполнения многофункциональной подводной станции, размещенной на морском дне.
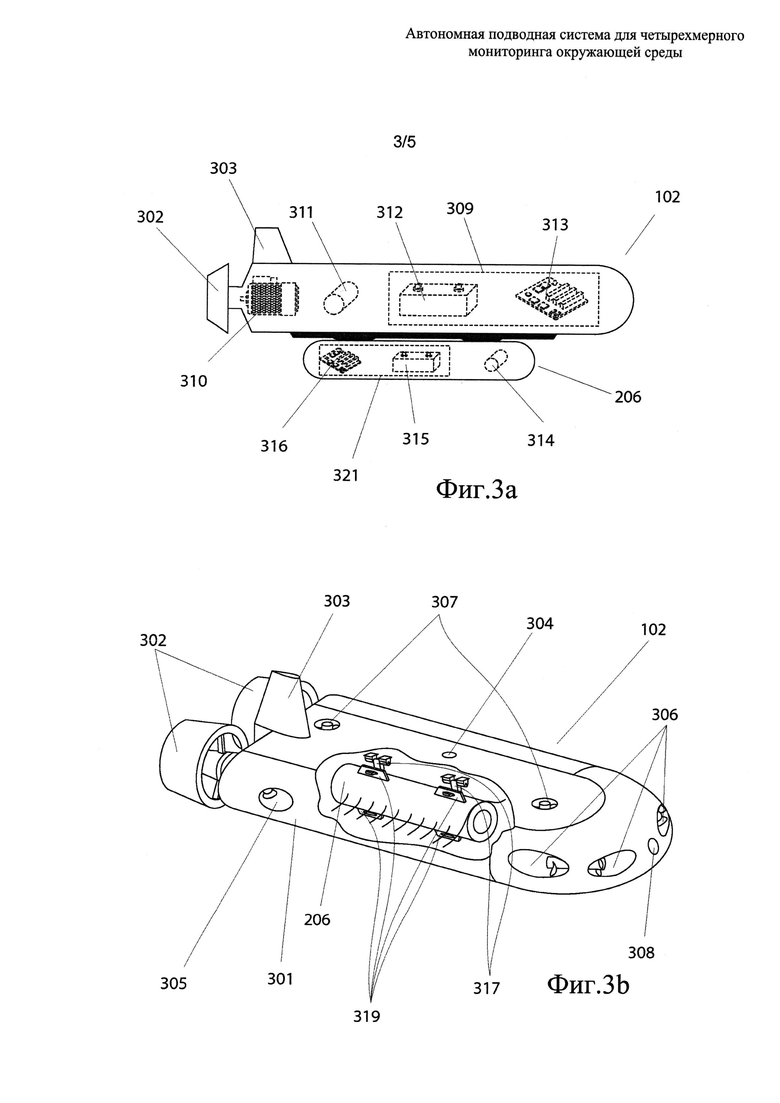
На фиг.3а схематично представлено автономное модульное подводное транспортное средство и соединенный с ним внешний измерительный модуль.
На фиг.3b показан вид в перспективе предпочтительного варианта выполнения автономного подводного транспортного средства, которое может использовать внешний измерительный модуль.
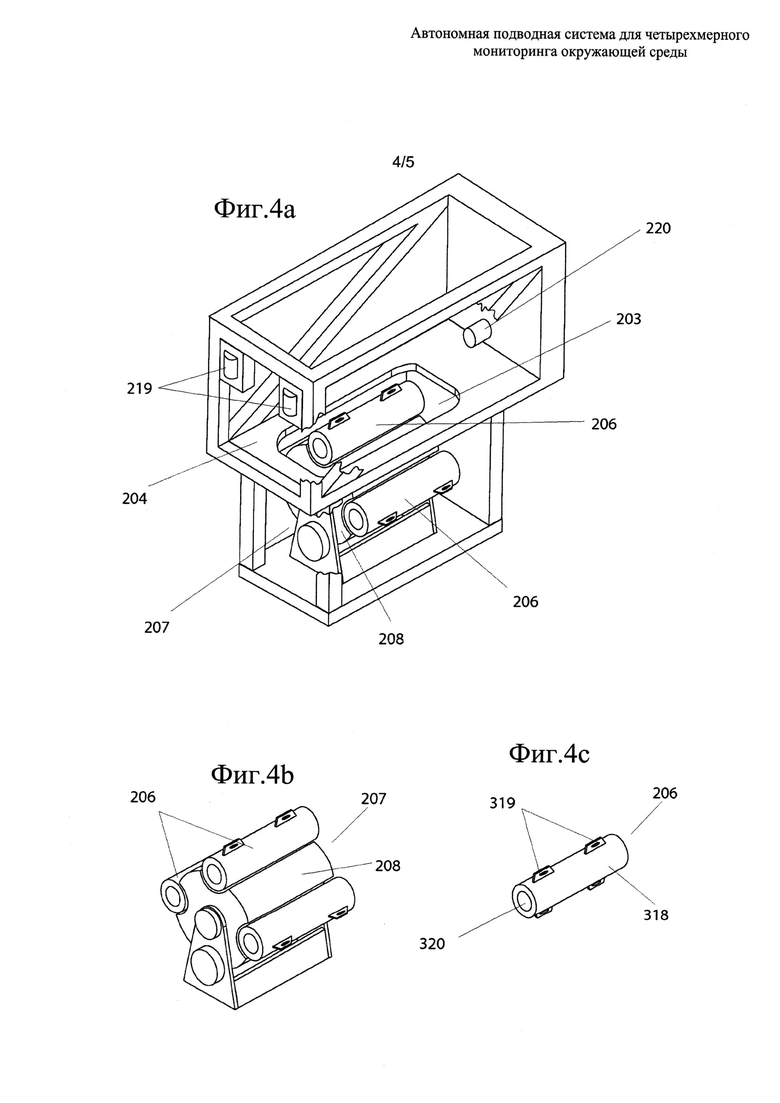
На фиг.4а показаны сечение на виде в перспективе системы оснащения автономного подводного транспортного средства и загрузочная область для него, представляющая собой часть многофункциональной подводной станции.
На фиг.4b показан вид в перспективе системы оснащения с измерительными модулями, которая представляет собой часть многофункциональной подводной станции.
На фиг.4с показан вид в перспективе измерительного модуля, который может быть связан с автономным подводным транспортным средством.
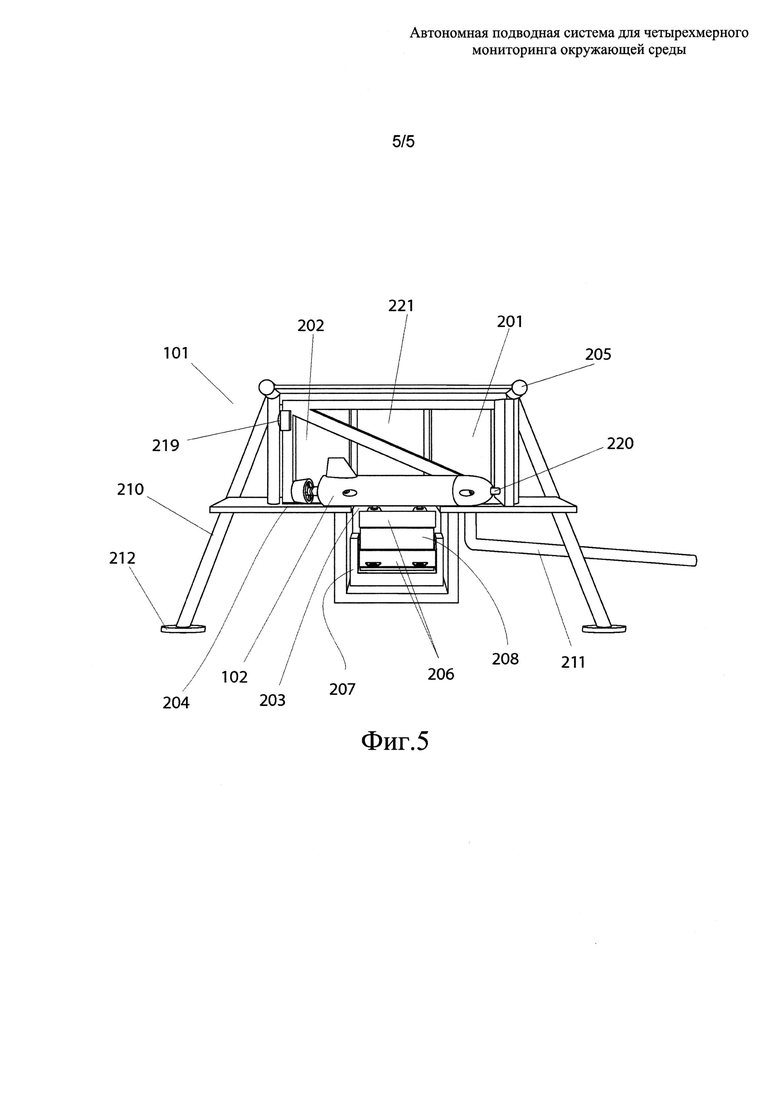
На фиг.5 показан вид в перспективе вертикального сечения многофункциональной подводной станции, в которую загружено автономное модульное подводное транспортное средство для его оснащения внешним измерительным модулем.
На чертежах автономная подводная система для четырехмерного мониторинга окружающей среды в целом обозначена позицией 100.
Первый вариант настоящего изобретения относится к автономной подводной системе 100 для мониторинга окружающей среды, содержащей многофункциональную подводную станцию 101, оснащенную бортовыми измерительными средствами 202, по меньшей мере одно автономное модульное подводное транспортное средство 102, выполненное с возможностью перемещения вдоль назначенного маршрута 106 в области 107, где производится мониторинг, и по меньшей мере один внешний измерительный модуль 206, который может быть соединен с указанным транспортным средством 102, при этом указанная многофункциональная подводная станция 101 содержит:
- по меньшей мере одну загрузочную область 204, выполненную с возможностью приема указанного транспортного средства 102;
- по меньшей мере одну интерфейсную систему 220, выполненную с возможностью осуществления связи с указанным загруженным транспортным средством 102;
- по меньшей мере одну систему 207 оснащения, выполненную с возможностью оснащения указанного загруженного транспортного средства 102 указанным измерительным модулем 206 и содержащую по меньшей мере одну область 208 временного хранения, предназначенную для хранения указанного модуля 206, и
- по меньшей мере одну управляющую систему 201, выполненную с возможностью управления функциями указанной станции 101.
Указанная область 107, где производится мониторинг, может быть обычной подводной областью, вовлеченной в прибрежную деятельность, где имеются инфраструктуры для извлечения и обеспечения взаимодействия, включающие резервуары 103, трубопроводы и кабели 105, связанные с конструкцией 104, расположенной на поверхности, и другие устройства, которые обычно используются в подводной области, где ведется добыча нефти или газа.
В частности, расположенная на поверхности конструкция 104, связанная посредством кабелей и трубопроводов 105 с подводной областью, может быть плавающей платформой или конструкцией, прикрепленной к морскому дну.
В предпочтительном варианте выполнения настоящего изобретения указанное автономное модульное подводное транспортное средство 102 исследует область 107, где производится мониторинг, проходя по назначенному маршруту 106 согласно траекториям, заранее запрограммированным или автономно вычисленным указанным транспортным средством.
В частности, назначенный маршрут 106 может включать прямолинейные траектории и/или искривленные траектории, маршруты на постоянной и/или переменной глубине, предпочтительно в пределах от 0 до 1500 метров.
В предпочтительном варианте выполнения настоящего изобретения указанная многофункциональная подводная станция 101 содержит металлическую конструкцию 205, предпочтительно из алюминиевого сплава, которая выполнена с возможностью установки на морское дно посредством ножек 210, имеющих опорные основания 212.
Указанная конструкция 205 обеспечивает физическую защиту от случайных явлений бортовым измерительным средствам 202, измерительному модулю 206, подводному транспортному средству 102, когда оно загружено в станцию 101, и любым другим устройствам, имеющимся в станции 101.
Кроме того, указанная конструкция 205 позволяет размещать внутри себя интерфейсную систему 220, систему 207 оснащения, управляющую систему 201, а также различные части внутри многофункциональной подводной станции 101.
В предпочтительном варианте выполнения настоящего изобретения указанное автономное модульное подводное транспортное средство 102 проводит мониторинговые кампании в указанной области 107 мониторинга, осуществляет сбор данных о подводной окружающей среде и о целостности работающих в ней инфраструктур с помощью измерительных средств, установленных на борту транспортного средства 102, и/или с помощью указанного внешнего измерительного модуля 206.
В предпочтительном варианте выполнения настоящего изобретения указанная система 207 оснащения обеспечивает указанное транспортное средство 102 измерительным модулем 206, наиболее подходящим для задач мониторинга, согласно инструкциям, принятым от указанной управляющей системы 201.
В предпочтительном варианте выполнения настоящего изобретения внешние измерительные модули 206 содержатся в области 208 временного хранения, выполненной внутри конструкции 205, оснащенной электромеханическими средствами (не показаны), которые осуществляют соединение модулей 206 со станцией или отсоединение модулей 206 от станции.
В частности, измерительные модули 206 хранятся в указанной области 208 временного хранения и при соединении с указанной областью 208 временного хранения могут заряжаться, конфигурироваться, программироваться и запускаться посредством управляющей системы 201.
В одном из вариантов выполнения настоящего изобретения указанная область 208 временного хранения может представлять собой автоматизированную систему, предпочтительно барабан (фиг.4b), который управляет измерительными модулями 206 для их загрузки в подводное транспортное средство 102 или выгрузки из подводного транспортного средства 102 на основе исследовательской задачи, запрограммированной или осуществляемой с помощью дистанционного управления.
После отделения указанных измерительных модулей 206 от указанной области 208 временного хранения, они могут быть размещены в подводном транспортном средстве 102 посредством электромеханических средств (не показаны), имеющихся в системе 207 оснащения.
В предпочтительном варианте выполнения настоящего изобретения указанная многофункциональная подводная станция 101 содержит бортовые измерительные средства 202, которые могут быть фиксированными 209 или подвижными 213 и предназначены для измерения по меньшей мере одного из следующих параметров:
- температуры;
- электропроводности;
- концентрации растворенного кислорода и/или процента насыщения растворенным кислородом;
- мутности;
- концентрации и/или профиля взвешенных частиц;
- флюоресценции (связанной, например, с хлорофиллом и CDOM);
- показателя pH;
- концентрации растворенных газов (например, CH4, H2S, CO2);
- концентрации углеводородов (например, РАН);
- концентрации питательных веществ (например, нитратов, фосфатов, силикатов, аммиака);
- концентрации металлических микроэлементов;
- профиля скорости и направления морского течения;
- высоты и направления волн;
- уровня прилива и отлива;
- давления звуковой волны (например, акустический мониторинг посредством гидрофонов наличия и прохождения морских видов, например китов) и
- биологической реакции живых организмов (например, частоты открытия/закрытия раковин моллюсков определенного вида).
В предпочтительном варианте выполнения настоящего изобретения указанные фиксированные бортовые измерительные средства 209 полностью содержатся в конструкции 205 и включают по меньшей мере один датчик 214 и по меньшей мере одно локальное управляющее устройство 215, сконфигурированное для управлениями всеми функциями датчиков, например для управления сбором данных, питанием, мониторингом и т.д.
В предпочтительном варианте выполнения настоящего изобретения указанные подвижные бортовые измерительные средства 213 отличаются от фиксированных бортовых измерительных средств 209 тем, что они могут перемещаться от станции 101 благодаря плавучему блоку 217, содержащему внутри себя по меньшей мере один датчик, и кабелю 218, который предотвращает его отсоединение от станции 101.
Указанный кабель 218, при его наматывании лебедкой 216, позволяет плавучему блоку 217, оснащенному датчиками, возвращаться в станцию 101 для взаимодействия непосредственно со станцией 101.
Такое вертикальное перемещение плавучего блока 217 позволяет определять профиль водяного столба, получая посредством имеющихся в нем датчиков данные о подводной среде на различной высоте от морского дна.
В предпочтительном варианте выполнения настоящего изобретения указанная многофункциональная подводная станция 101 содержит в указанной конструкции 205 управляющую систему 201, предназначенную для управления функциями станции, в частности осуществлением связи между различными бортовыми измерительными средствами, взаимодействием с конструкцией 104, расположенной на поверхности, распределением и регулированием подачи электроэнергии, мониторингом технических параметров системы (состояния, подачи сигналов тревоги и т.д.), сбором и хранением данных, полученных различными измерительными средствами, конфигурацией и выбором внешнего измерительного модуля 206 и программированием задач мониторинга.
В частности, указанная управляющая система 201 может быть связана с конструкцией 104, расположенной на поверхности, посредством по меньшей мере одного составного кабеля 211, который обеспечивает передачу данных и/или подачу энергии в станцию 101.
В предпочтительном варианте выполнения настоящего изобретения указанная многофункциональная подводная станция 101 содержит в указанной конструкции 205 загрузочную область 204, обеспечивающую прием/уход и временную стоянку транспортного средства 102 внутри подводной станции 101.
Прием транспортного средства 102 в эту загрузочную область 204 и уход транспортного средства 102 из нее обеспечиваются соответствующими направляющими устройствами, выбранными из следующего: акустические системы позиционирования, видеокамеры, средства освещения, датчики 219 расстояния, входные перегородки.
В частности, указанные направляющие устройства, являющиеся частью указанной загрузочной области 204, могут быть связаны с управляющей системой 201.
Предпочтительно, указанная загрузочная область 204 может содержать горизонтальную плоскость, на которой транспортное средство 102 остается после входа в станцию 101, и отверстие 203 в горизонтальной плоскости, через которое система 207 оснащения соединяет измерительный модуль 206 с загруженным транспортным средством 102.
Следует отметить, что, когда автономное модульное подводное транспортное средство 102 находится в загрузочной области 204, указанная интерфейсная система 220 станции позволяет выполнить по меньшей мере одну из следующих операций:
- передачу данных между транспортным средством 102 и станцией 101;
- зарядку аккумуляторов 312 транспортного средства 102.
В предпочтительном варианте выполнения настоящего изобретения указанная интерфейсная система 220 содержит средства непосредственного соединения, такие как соединительные гнезда или контактные элементы.
В альтернативном варианте выполнения настоящего изобретения указанная интерфейсная система 220 между станцией 101 и транспортным средством 102 содержит средства беспроводной связи.
В этом конкретном решении аккумуляторы 312 указанного транспортного средства 102 могут заряжаться с помощью систем электромагнитной индукции.
Следует отметить, что такие индукционные системы известны и доступны специалистам и не налагают дополнительных ограничений в отношении работы по обычной процедуре.
Второй объект настоящего изобретения относится к автономному модульному подводному транспортному средству 102, оснащенному бортовыми измерительными датчиками 311 и содержащему по меньшей мере один главный движитель 302, по меньшей мере один вспомогательный движитель 305, 306, 307 для точного позиционирования, корпус 301, по меньшей мере один электронный управляющий модуль 313, по меньшей мере один накопитель 312 энергии, по меньшей мере одну соединительную систему 308, которое отличается тем, что оно содержит крепежные средства 317 для крепления по меньшей мере одного внешнего измерительного модуля 206, при этом указанный внешний измерительный модуль 206 оснащен по меньшей мере одним измерительным датчиком 314.
В предпочтительном варианте выполнения настоящего изобретения указанные главные движители 302 и движители 305, 306, 307 для точного позиционирования имеют винт и приводятся в действие по меньшей мере одним двигателем 310, расположенным внутри корпуса 301, при этом двигатель 310 предпочтительно представляет собой электродвигатель.
В частности, боковые движители 305, передние движители 306 и верхние/нижние движители 307 служат для точного перемещения транспортного средства 102 в пространстве, обеспечивая большие возможности для маневрирования и позиционирования.
Маневрирование транспортного средства 102 может также обеспечиваться одним или более рулями 303.
В предпочтительном варианте выполнения настоящего изобретения указанный корпус 301 выполнен из нержавеющего материала, предпочтительно из композитного материала.
Внутренние компоненты, которые должны работать на открытом воздухе, например электронный управляющий модуль 313 и накопитель 312 энергии, заключены в один или более водонепроницаемые контейнеры 309, предпочтительно выполненные из титана и способные выдерживать высокое давление, предпочтительно до 300 бар.
В предпочтительном варианте выполнения настоящего изобретения указанные бортовые измерительные датчики 311 выполняют измерения по меньшей мере одного из следующих параметров:
- температуры;
- электропроводности;
- концентрации растворенного кислорода и/или процента насыщения растворенным кислородом;
- мутности;
- концентрации и/или профиля взвешенных частиц;
- флюоресценции (связанной, например, с хлорофиллом и/или CDOM);
- показателя pH;
- концентрации растворенных газов (например, CH4, H2S, CO2);
- концентрации углеводородов (например, РАН).
В частности, указанные измерительные датчики 311, расположенные внутри корпуса 301, могут входить в контакт с морской водой посредством одного или более отверстий 304, выполненных в указанном корпусе 301.
В предпочтительном варианте выполнения настоящего изобретения указанные крепежные средства 317 могут быть электромеханическими средствами, обеспечивающими присоединение модуля 206 к транспортному средству 102.
Указанное транспортное средство 102 может содержать средства связи (не показаны) с внешним измерительным модулем 206, обеспечивающие двунаправленный обмен информацией для синхронизации данных, собранных различными датчиками, а также для возможного обмена энергией.
В предпочтительном варианте выполнения настоящего изобретения указанное автономное подводное модульное транспортное средство 102 содержит соединительную систему 308, выполненную с возможностью взаимодействия с интерфейсной системой 220 для осуществления связи между транспортным средством 102 и подводной станцией 101. Кроме того, указанная соединительная система 308 позволяет заряжать бортовой накопитель 312 энергии.
В предпочтительном варианте выполнения настоящего изобретения указанное автономное подводное модульное транспортное средство 102 может содержать электронный управляющий модуль 313, который управляет функционированием и работой движителей, бортовых датчиков 311, бортового накопителя 312 энергии, крепежных средств 317, соединительной системы 308 и возможных средств связи с внешним измерительным модулем 206.
В конкретном варианте выполнения настоящего изобретения указанный накопитель 312 энергии представляет собой аккумулятор, предпочтительно литий-ионный или литий-полимерный аккумулятор.
Следует отметить, что транспортное средство может иметь корпус 301 уплощенной формы, в частности с плоской нижней поверхностью, для облегчения посадки транспортного средства 102 на многофункциональную подводную станцию 101 или на морское дно.
В частности, когда транспортное средство 102 приближается к станции 101, нижняя поверхность корпуса 301 может легко опереться на поверхность загрузочной области 204, позволяя системе 207 оснащения проникнуть в транспортное средство через отверстие 203 в указанной поверхности корпуса.
В предпочтительном варианте выполнения настоящего изобретения внешний измерительный модуль 206, оснащенный измерительными датчиками 314, может содержать:
- соединительные средства 319;
- средства 320 связи;
- корпус 318 и
- управляющий блок 316.
В одном из вариантов выполнения настоящего изобретения внешний измерительный модуль 206 содержит по меньшей мере внутренний источник 315 энергии, предпочтительно аккумулятор.
В предпочтительном варианте выполнения настоящего изобретения управляющий блок 316 и источник 315 энергии могут быть заключены в один или более водонепроницаемые контейнеры 321, расположенные в корпусе 318 и способные выдерживать высокое давление под водой.
Указанный водонепроницаемый контейнер 321 предпочтительно выполнен из титана.
Следует отметить, что указанные управляющий блок 316, датчики 314 и внутренний источник 315 энергии содержатся в указанном корпусе 318 для лучшей защиты от возможных ударов и для обеспечения соответствующей гидродинамики транспортного средства. Указанный корпус 318 предпочтительно выполнен из композитного материала или другого нержавеющего материала.
В предпочтительном варианте выполнения настоящего изобретения соединительные средства 319 обеспечивают крепление измерительного модуля 206 к системе 207 оснащения в подводной многофункциональной станции 101 или к транспортному средству 102, обеспечивая их сцепление во время перемещения транспортного средства 102 в воде.
В одном из вариантов выполнения настоящего изобретения соединительные средства 319 могут быть механическими или электромеханическими и приводиться в действие указанным управляющим блоком 316 или могут иметь пазы соответствующей формы, выполненные в корпусе 318.
В предпочтительном варианте выполнения настоящего изобретения средство 320 связи обеспечивает обмен информацией с внешними конструкциями, такими как транспортное средство 102 или система 207 оснащения многофункциональной подводной станции 101, и/или подачу в них энергии.
В еще одном варианте выполнения настоящего изобретения средство 320 связи обеспечивает синхронизацию измерений, выполняемых датчиками 314, с измерениями, выполняемыми бортовыми датчиками 311 указанного транспортного средства 102.
В предпочтительном варианте выполнения настоящего изобретения управляющий блок 316 управляет работой измерительных датчиков 314, регулировкой и распределением питания, а также взаимодействием с транспортным средством 102.
В предпочтительном варианте выполнения настоящего изобретения измерительный датчик 314, установленный в указанном внешнем измерительном модуле 206, может быть выбран из следующих типов датчиков:
- оптический датчик (фотокамеры, видеокамеры);
- акустический датчик (гидролокаторы, эхолоты);
- автоматический анализатор углеводородов;
- автоматический анализатор фенолов;
- автоматический анализатор металлических микроэлементов и
- автоматический анализатор питательных веществ.
Третий объект настоящего изобретения относится к способу проведения четырехмерного мониторинга подводной окружающей среды, где имеется многофункциональная подводная станция 101 согласно настоящему изобретению, по меньшей мере один внешний измерительный модуль 206 согласно настоящему изобретению и по меньшей мере одно автономное модульное подводное транспортное средство 102 согласно настоящему изобретению, при этом указанный способ включает следующие операции:
- выбор и подачу по меньшей мере одного внешнего измерительного модуля 206 в автономное модульное подводное транспортное средство 102 посредством многофункциональной подводной станции 101;
- соединение внешнего измерительного модуля 206 с автономным модульным подводным транспортным средством 102;
- отсоединение автономного модульного подводного транспортного средства 102 и соединенного с ним внешнего измерительного модуля 206 от многофункциональной подводной станции 101;
- перемещение автономного модульного подводного транспортного средства 102 и соединенного с ним внешнего измерительного модуля 206 вдоль траектории, заранее заданной или вычисленной в режиме реального времени на основе данных, измеренных датчиками;
- проведение измерений и сбор данных о подводной окружающей среде датчиками, имеющимися в автономном подводном транспортном средстве 102 и в соединенном с ним внешнем измерительном модуле 206;
- возвращение автономного модульного подводного транспортного средства 102 к многофункциональной подводной станции 101;
- загрузку данных, собранных подводной многофункциональной станцией 101;
- зарядку аккумуляторов автономного модульного подводного транспортного средства 102 многофункциональной подводной станцией 101;
- загрузку автономного модульного подводного транспортного средства 102 внутрь многофункциональной подводной станции 101 до выполнения следующей задачи;
- измерение и сбор данных о подводной окружающей среде бортовыми измерительными средствами 202 многофункциональной подводной станции 101;
- обработку совокупности данных, собранных автономным модульным подводным транспортным средством 102, внешним измерительным модулем 206 и бортовыми измерительными средствами 202, для анализа подводной окружающей среды.
В предпочтительном варианте выполнения настоящего изобретения указанный способ обеспечивает мониторинг окружающей среды путем согласования данных, собранных в момент обнаружения, и местоположения на маршруте.
В предпочтительном варианте выполнения настоящего изобретения собранные данные представляют собой измерения по меньшей мере одного из следующих параметров:
- температуры;
- электропроводности;
- концентрации растворенного кислорода и/или процента насыщения растворенным кислородом;
- мутности;
- концентрации и/или профиля взвешенных частиц;
- флюоресценции (связанной, например, с хлорофиллом и CDOM);
- показателя pH;
- концентрации растворенных газов (например, CH4, H2S, CO2);
- концентрации углеводородов;
- концентрации питательных веществ;
- концентрации металлических микроэлементов;
- концентрации фенолов;
- профиля скорости и направления морского течения;
- высоты и направления волн;
- уровня прилива и отлива;
- давления звуковой волны (например, для акустического мониторинга посредством гидрофонов наличия и прохождения морских видов, например китов);
- биологической реакции живых организмов (например, частоты открытия/закрытия раковин моллюсков определенного вида) и
- оптических и/или акустических изображений, например морского дна и исследуемых инфраструктур.
В предпочтительном варианте выполнения настоящего изобретения выбранная траектория может автономно определяться управляющей системой 201 на основе заранее выполненных карт или на основе обработки в режиме реального времени собранных данных, или, альтернативно, может задаваться расположенной на поверхности системой (не показана), связанной со станцией 101.
В предпочтительном варианте выполнения настоящего изобретения данные, собранные во времени, обеспечивают после их обработки полную картину, то есть четырехмерную картину мониторинга подводной окружающей среды.
Пример
Для указанной цели использовалась автономная подводная система 100, помещенная на морском дне в области 107, в которой имела место деятельность по добыче нефти и газа, согласно фиг.1, при этом автономное модульное подводное транспортное средство 102 передвигалось по маршруту 106, априорно заданному на основе расположения инфраструктур 103 и трубопроводов 105, которые соединяют указанные инфраструктуры с платформой, расположенной на поверхности 104.
Во время исследования 106 автономное модульное подводное транспортное средство 102 собирало данные, относящиеся к морской окружающей среде и целостности работающих в ней инфраструктур, с помощью датчиков, установленных на борту и/или расположенных в измерительном модуле 206, и возвращалось после выполнения исследования в многофункциональную подводную станцию 101, расположенную на морском дне.
В частности, область, в которой производится мониторинг с помощью указанной автономной подводной системы 100, занимала приблизительно 4 км в ширину и 4 км в длину и была расположена на глубине приблизительно 1000 метров.
Как показано на фиг.2, многофункциональная подводная станция 101 содержала металлическую конструкцию 205, которая прочно лежала на морском дне благодаря четырем опорным ножкам 210, каждая из которых имела опорное основание 212.
Различные системы, необходимые для функционирования указанной станции, были расположены в указанной конструкции 205, которая имела основание 5×5 метров и высоту 3,5 метров. В частности, станция содержала управляющую систему 201, которая была соединена с плавучей платформой 104 посредством составного кабеля 211.
Эта управляющая система 201 посылала информацию, относящуюся к задаче мониторинга, и принимала информацию о конфигурации для будущих исследований.
Кроме того, управляющая система 201 управляла распределением и регулированием электроэнергии, принимаемой из конструкции, расположенной на поверхности, через составной кабель 211.
Кроме того, управляющая система 201 управляла осуществлением связи с различными бортовыми измерительными средствами, собирая данные измерений и сохраняя их до обработки.
Кроме того, указанная управляющая система 201 обеспечивала управление различными техническими параметрами системы (состоянием, подачей сигнала тревоги и т.д.).
Станция 101 содержала внутри себя два типа бортовых измерительных средств 202: фиксированного типа 209 и подвижного типа 213, которые позволяют измерять различные параметры подводной окружающей среды.
Ниже перечислены некоторые из датчиков, использованных в бортовых измерительных средствах.
Датчик проводимости, температуры и глубины для измерения температуры, электропроводности и параметров, получаемых на их основе (соленость, плотность, скорость звука). В частности, использовался датчик CTD SBE-16, выпускаемый компанией Seabird Electronics.
Оптический датчик для измерения концентрации насыщения и/или процентного содержания растворенного кислорода. В частности, использовался датчик модели 4330F, выпускаемой компанией AADI.
Датчик для измерения мутности посредством излучения в диапазоне синего цвета. В частности, использовалась датчик модели ECO-NTU, выпускаемой компанией WETLABS.
Высокочастотный акустический датчик для измерения концентрации и/или профиля взвешенных частиц. В частности, использовался датчик модели AQUAscat 1000 компании Aquatec.
Флуорометр для измерения флюоресценции, например хлорофилла и CDOM. В частности, использовался флуорометр модели ECO FL компании WETLABS.
Датчик для измерения водородного показателя (pH). В частности, использовался датчик модели SBE-27 компании Seabird Electronics.
Датчик для измерения концентрации растворенного метана. В частности, использовался датчик модели METS компании Franatec.
Датчик для измерения концентрации углеводородов. В частности, использовался датчик модели HydroC компании Contros.
Датчик для измерения концентрации питательных веществ: нитратов, фосфатов, силикатов и аммиака. В частности, использовался устанавливаемый на месте эксплуатации датчик питательных веществ модели NAS3-X компании Envirotech Instruments.
Датчик для измерения концентрации металлических микроэлементов, таких как медь, свинец, кадмий, цинк, марганец и железо. В частности, использовался подводный зонд вольт-амперметра модели VIP компании Idronaut.
Датчик для измерения профиля скорости и направления морского течения. В частности, использовался акустический доплеровский датчик профиля потока модели Workhorse Monitor ADCP компании RD Instruments.
Датчик для измерения уровня прилива и отлива. В частности, использовался датчик глубины, работающий под высоким давлением, серии 8СВ компании Paroscientific.
Датчик для измерения давления акустической волны. В частности, использовался гидрофон модели ТС-4042 компании RESON.
Датчик для измерения биологических реакций моллюсков. В частности, использовалась система, разработанная компанией Biota Guard.
Подвижное измерительное средство 213 содержало плавучий блок 217, выполненный из композитного материала и содержащий один или более измерительных датчиков. Поскольку корпус 217 обладал плавучестью, он обеспечивал определение профиля вдоль водяного столба.
Как только эти операции были выполнены, электрическая лебедка 216 наматывала кабель 218, который соединял плавучий блок 217 со станцией 101, вновь перемещая подвижное измерительное средство 213 во внутреннюю часть конструкции 205.
Фиксированное измерительное средство 209, напротив, было жестко связано с конструкцией 205, но оно может быть заменено при необходимости с помощью обычных подводных операций с использованием дистанционно-управляемых транспортных средств, снабженных соответствующим манипулятором.
Станция 101 содержала внутри указанной конструкции загрузочную область 204 (фиг.2, 4а и 5), которая включала горизонтальную плоскость размеров 4000×2000 мм, способную легко принять автономное модульное подводное транспортное средство 102.
Указанная загрузочная область 204 содержала также некоторые средства, которые поддерживали транспортное средство 102, обеспечивая его позиционирование внутри станции 101. В частности, в загрузочной области 204 были установлены некоторые акустические системы позиционирования и датчики 219 расстояния, которые обнаруживали приближение транспортного средства 102 к рассматриваемой области.
Кроме того, в загрузочной области 204 имелось отверстие 203 в горизонтальной опорной области, через которое внешние измерительные модули 206 устанавливались в транспортном средстве 102.
При входе в станцию 101 транспортное средство 102 располагалось на плоскости в загрузочной области 204 в таком положении, которое позволяет системе 207 оснащения легко управлять транспортным средством 102 через отверстие в плоскости 203 для временного хранения и замены внешнего измерительного модуля 206.
В частности, система 207 оснащения размещала измерительный модуль 206, отделенный от транспортного средства 102, в области 208 временного хранения и принимала инструкции от управляющей системы 201 для извлечения нового внешнего измерительного модуля 206, который должен быть помещен в транспортное средство 102.
Все доступные внешние измерительные модули 206 содержались в области 208 временного хранения, в частности в карусельной системе, которая путем поворота обеспечивала извлечение модуля 206, заранее выбранного для задачи мониторинга; остальные модули 206 оставались связанными с каруселью для операций конфигурации и зарядки.
После того как был извлечен измерительный модуль 206, система 207 оснащения совмещала измерительный модуль с крепежными средствами 317 в транспортном средстве 102, а затем выполняла операцию соединения внешнего измерительного модуля 206 с транспортным средством 102.
Используемый внешний измерительный модуль 206 имел соединительные средства 319, которые выступали относительно корпуса 318, как показано на фиг.4с.
Эти соединительные средства 319 позволяли соединять модуль как с системой 207 оснащения, так и с крепежными средствами 317 транспортного средства.
В частности, корпус 318 внешнего измерительного модуля 206 был выполнен из композитного материала.
Компоненты внутри модуля, которые должны работать на открытом воздухе, например управляющий блок 316 и внутренний источник 315 энергии, были заключены в водонепроницаемый контейнер 321, способный выдерживать высокое давление.
Внешний измерительный модуль 206 имел цилиндрическую форму и плоские концы и в некоторых конфигурациях достигал 1500 мм в длину и 250 мм в диаметре.
Если модуль 206 правильно размещен системой 207 оснащения, крепежные средства 317 крепят внешний измерительный модуль 206 к транспортному средству 102.
Лишь после этого модуль 206 извлекается электромеханическими средствами системы 207 оснащения, возвращаясь в положение посадки.
В измерительном модуле 206 имелось также подходящее соединение, которое работает в качестве средства 320 связи и служит для обмена информацией и данными с транспортным средством 102 или подводной станцией 101.
Это соединение обеспечивает обмен информацией с модулем 206 на входе и выходе.
В частности, когда модуль 206 соединен с транспортным средством 102 с помощью крепежных средств 317, средство 320 связи входит в контакт с соединительными средствами (не показаны) автономного модульного подводного транспортного средства 102.
С помощью этого средства обеспечивается синхронизация измерительных средств 311 и 314 для получения однозначных измерений во времени.
Использованное автономное модульное подводное транспортное средство 102 имеет корпус 301 уплощенной формы для лучшей опоры на морское дно и на плоскость 204 станции 101 и содержит ряд движителей 302, которые позволяют средству перемещаться в трех измерениях (фиг.3b). В частности, имеются два главных движителя 302 в кормовой части транспортного средства 102 и два задних 305 и четыре передних 306 вспомогательных боковых движителей, которые расположены с двух сторон транспортного средства 102. Наконец, имеется два верхних и нижних вспомогательных движителя 307 для каждой стороны, расположенных в носовой и кормовой частях транспортного средства 102. Все движители приводились в действие электродвигателями.
Комбинация всех движителей обеспечивает транспортному средству максимальную гибкость перемещения и позиционирования в пространстве, а также возможность стабилизации транспортного средства 102 в горизонтальном направлении при движении.
Движители снабжены перезаряжаемыми литий-ионными аккумуляторами 312, способными работать автономно по меньшей мере восемь часов.
Руль 303 обеспечивает маневрирование и установку траекторий, по которым происходит движение во время мониторинга по маршруту 106.
Бортовые датчики 311 транспортного средства 102 входят в прямой контакт с морской водой посредством отверстий 304, выполненных в корпусе 301.
Транспортное средство 102 имеет следующие размеры: 3750×1500×750 мм (длина × ширина × высота).
Бортовые датчики 311 транспортного средства 102 и измерительные датчики 314 внешнего измерительного модуля 206 позволяют измерять многочисленные параметры относительно времени и положения. В частности, транспортное средство оснащено бортовыми измерительными средствами для измерения следующих параметров:
- температуры, электропроводности и давления с помощью зонда CTD SBE-49 компании SeaBird,
- мутности посредством датчика ECO NTU компании WETLABS,
- флюоресценции хлорофилла и CDOM посредством датчика ECO FL компании WETLABS,
- концентрации растворенного кислорода и процента насыщения растворенным кислородом посредством датчика 4330F компании AADI,
- объемной концентрации углеводородов РАН посредством датчика HydroC компании CONTROS.
Внешний измерительный модуль 206, присоединяемый к транспортному средству и выбираемый в зависимости от программы задачи, выступает в качестве:
- модуля взятия проб воды, оснащенного автоматическим средством взятия проб Aqua Monitor компании Envirotech Instruments,
- модуля наблюдения, используемого для обнаружения утечки или для визуального осмотра подводных инфраструктур, например напорных трубопроводов, коллекторов, коллекторов подводного трубопровода и т.д. Он оснащен измерительными средствами для мониторинга следующих параметров/данных:
- изображений и видеоизображений, получаемых цветовыми видеокамерами с высоким разрешением INSPECTOR HD, производимыми компанией Remote Ocean System (ROS);
- концентрации метана, выявляемой с помощью датчика METS компании Franatech;
- объемной концентрации углеводородов РАН посредством датчика HydroC компании CONTROS;
- наличия трассирующего красителя, выявляемого с помощью оптической измерительной системы Bowtech с использованием светодиода LED-540 и монохроматической телевизионной камеры 600TVL;
- модуля анализа загрязнений для измерения на месте эксплуатации следующих параметров:
- концентрации металлических микроэлементов посредством зонда VIP компании Idronaut;
- концентрации конкретных углеводородов с помощью одного или более анализаторов;
- концентрации фенолов с помощью анализатора;
- концентрации питательных веществ посредством датчика NAS3-X компании Envirotech Instruments.
- акустического исследовательского модуля, в котором используется сонар с синтезированной апертурой Prosas Surveyor компании Applied Signal Technology Inc.
Очевидно, что в описанной системе могут быть выполнены многочисленные изменения и модификации в пределах сущности изобретения; кроме того, все детали могут быть заменены на технически эквивалентные элементы. На практике материалы и размеры могут меняться согласно техническим требованиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗАЦИИ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПАССАЖИРСКИХ ПЕРЕВОЗОК | 2022 |
|
RU2784825C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| Способ экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2623837C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЕРЕМЕННОЙ ПЛАВУЧЕСТИ И ПОДЪЕМА К ПОВЕРХНОСТИ ДЛЯ ОБЕСПЕЧЕНИЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2017 |
|
RU2744984C2 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
Изобретение относится к подводной технике и может быть использовано для непрерывного длительного широкодиапазонного мониторинга окружающей среды вблизи морского дна. Автономная подводная система для мониторинга окружающей среды содержит многофункциональную подводную станцию, оснащённую бортовыми измерительными средствами. Автономное модульное подводное транспортное средство выполнено с возможностью перемещения вдоль назначенного маршрута и может быть соединено с внешним измерительным модулем. Загрузочная область подводной станции выполнена с возможностью приёма указанного транспортного средства. Интерфейсная система выполнена с возможностью осуществления связи с транспортным средством. Для управления функциями подводной станции автономная подводная система содержит управляющую систему. Достигается возможность проведения различных видов исследований окружающей среды. 2 н. и 25 з.п. ф-лы, 8 ил.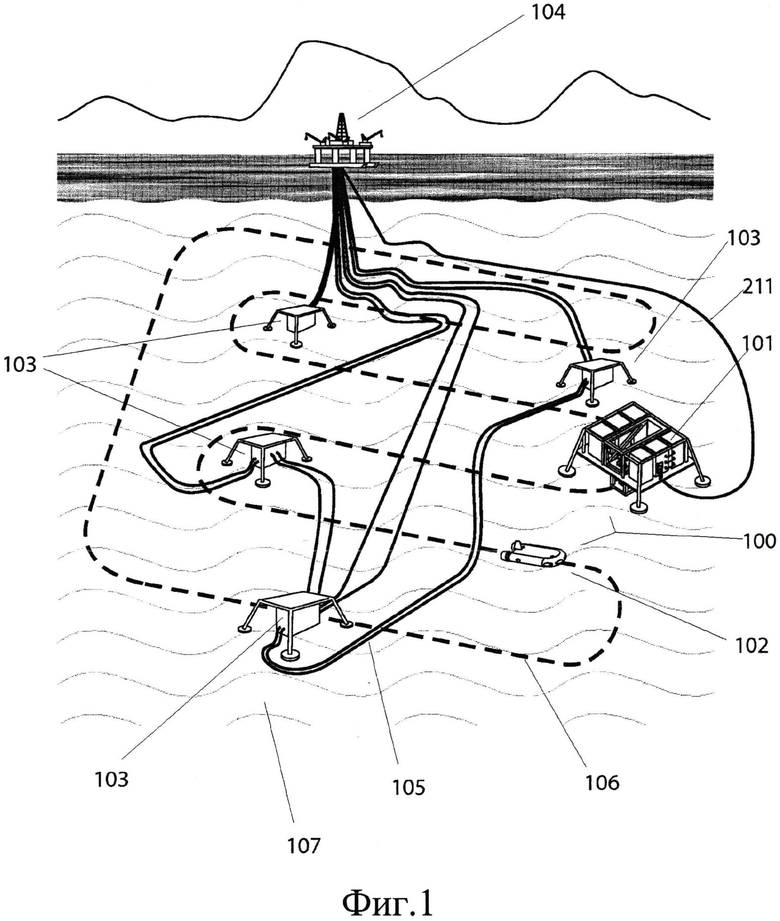
1. Автономная подводная система (100) для мониторинга окружающей среды, содержащая многофункциональную подводную станцию (101), оснащенную бортовыми измерительными средствами (202), по меньшей мере одно автономное модульное подводное транспортное средство (102), выполненное с возможностью перемещения вдоль назначенного маршрута (106) внутри области (107), в которой производится мониторинг, и по меньшей мере один внешний измерительный модуль (206), который может быть соединен с указанным транспортным средством (102), при этом указанная многофункциональная подводная станция (101) содержит:
- по меньшей мере одну загрузочную область (204), выполненную с возможностью приема указанного транспортного средства (102);
- по меньшей мере одну интерфейсную систему (220), выполненную с возможностью осуществления связи с указанным загруженным транспортным средством (102);
- по меньшей мере одну систему (207) оснащения, выполненную с возможностью оснащения указанного загруженного транспортного средства (102) указанным измерительным модулем (206) и содержащую по меньшей мере одну область (208) временного хранения, выполненную с возможностью хранения указанного модуля (206), и
- по меньшей мере одну управляющую систему (201), предназначенную для управления функциями указанной станции (101).
2. Автономная подводная система (100) по п.1, в которой указанное автономное модульное подводное транспортное средство (102) исследует указанную область (107), где производится мониторинг, проходя по назначенному маршруту (106) согласно траекториям, заранее запрограммированным или автономно вычисленным указанным транспортным средством.
3. Автономная подводная система (100) по п.1 или 2, в которой указанное автономное модульное подводное транспортное средство (102) проводит мониторинговые кампании в указанной области (107) мониторинга, осуществляет сбор данных о подводной окружающей среде и о целостности работающих в ней инфраструктур с помощью измерительных средств, установленных на борту транспортного средства (102), и/или с помощью указанного внешнего измерительного модуля (206).
4. Автономная подводная система (100) по п.1, в которой указанные внешние измерительные модули (206) содержатся в области (208) временного хранения, выполненной внутри конструкции (205), оснащенной электромеханическими средствами для соединения модулей (206) со станцией или отсоединения модулей (206) от станции.
5. Автономная подводная система (100) по п.1, в которой указанная многофункциональная подводная станция (101) содержит бортовые измерительные средства (202), которые могут быть фиксированными (209) или подвижными (213) и выполнены с возможностью измерения по меньшей мере одного из следующих параметров:
- температуры;
- электропроводности;
- концентрации растворенного кислорода и/или процента насыщения растворенным кислородом;
- мутности;
- концентрации и/или профиля взвешенных частиц;
- флюоресценции;
- показателя pH;
- концентрации растворенных газов;
- концентрации углеводородов;
- концентрации питательных веществ;
- концентрации металлических микроэлементов;
- профиля скорости и направления морского течения;
- высоты и направления волн;
- уровня прилива и отлива;
- давления звуковой волны и
- биологической реакции живых организмов.
6. Автономная подводная система (100) по п.1 или 2, в которой указанные фиксированные бортовые измерительные средства (209) полностью содержатся внутри конструкции (205) и включают по меньшей мере один датчик (214) и по меньшей мере один локальный управляющий блок (215), выполненный с возможностью управления всеми функциями датчиков.
7. Автономная подводная система (100) по п.6, в которой указанные подвижные бортовые измерительные средства (213) отличаются от фиксированных бортовых измерительных средств (209) тем, что они могут перемещаться от станции (101) благодаря плавучему блоку (217), содержащему внутри себя по меньшей мере один датчик, и кабелю (218), который предотвращает его отсоединение от указанной станции (101).
8. Автономная подводная система (100) по п.1 или 2, в которой указанная управляющая система (201) соединена с конструкцией (104), расположенной на поверхности, посредством по меньшей мере одного составного кабеля (211), который обеспечивает передачу данных и/или подачу энергии в многофункциональную подводную станцию (101).
9. Автономная подводная система (100) по п.1, в которой прием транспортного средства (102) в загрузочную область (204) и выход из нее транспортного средства (102) обеспечиваются соответствующими направляющими устройствами, выбранными из следующего: акустические системы позиционирования, видеокамеры, средства освещения, датчики (219) расстояния, воронки.
10. Автономная подводная система (100) по п.1 или 2, в которой, когда автономное модульное подводное транспортное средство (102) находится в загрузочной области (204), указанная интерфейсная система (220) станции позволяет выполнить по меньшей мере одну из следующих операций:
- передачу данных между транспортным средством (102) и станцией (101);
- зарядку аккумуляторов (312) транспортного средства (102).
11. Автономная подводная система (100) по п.10, в которой указанная интерфейсная система (220) содержит средства прямого соединения, такие как соединительные гнезда или контактные элементы.
12. Автономная подводная система (100) по п.10, в которой указанная интерфейсная система (220) между станцией (101) и транспортным средством (102) содержит средства беспроводной связи.
13. Автономное модульное подводное транспортное средство (102), оснащенное бортовыми измерительными датчиками (311) и содержащее по меньшей мере один главный движитель (302), по меньшей мере один вспомогательный движитель (305, 306, 307) для точного позиционирования, корпус (301), по меньшей мере один электронный управляющий модуль (313), по меньшей мере один накопитель (312) энергии и по меньшей мере одну соединительную систему (308), отличающееся тем, что оно содержит крепежные средства (317) и по меньшей мере один внешний измерительный модуль (206), оснащенный по меньшей мере одним измерительным датчиком (314).
14. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанные главные движители (302) и движители (305, 306, 307) для точного позиционирования имеют винт и приводятся в действие по меньшей мере одним электродвигателем (310), расположенным внутри указанного корпуса (301).
15. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанный корпус (301) выполнен из нержавеющего композитного материала.
16. Автономное модульное подводное транспортное средство (102) по п.13, в котором электронный управляющий модуль (313) и накопитель (312) энергии размещены в одном или более водонепроницаемых контейнерах (309), выполненных из титана и способных выдерживать давление до 300 бар.
17. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанные бортовые измерительные датчики (311) выполняют измерения по меньшей мере одного из следующих параметров:
- температуры;
- электропроводности;
- концентрации растворенного кислорода и/или процента насыщения растворенным кислородом;
- мутности;
- флюоресценции;
- показателя pH;
- концентрации растворенных газов и
- концентрации углеводородов.
18. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанные бортовые измерительные датчики (311), расположенные в указанном корпусе (301), взаимодействуют с морской окружающей средой посредством по меньшей мере одного отверстия (304) в указанном корпусе (301).
19. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанные крепежные средства (317) являются электромеханическими и обеспечивают сцепление внешнего измерительного модуля (206) с подводным транспортным средством (102).
20. Автономное модульное подводное транспортное средство (102) по п.13, которое содержит средства связи с внешним измерительным модулем (206), обеспечивающие двунаправленный обмен информацией для синхронизации данных, собранных различными датчиками.
21. Автономное модульное подводное транспортное средство (102) по п.13, которое содержит соединительную систему (308), выполненную с возможностью взаимодействия с интерфейсной системой (220) для осуществления связи между транспортным средством (102) и подводной станцией (101).
22. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанный корпус (301) имеет уплощенную форму с плоской нижней поверхностью для облегчения посадки транспортного средства (102) на многофункциональную подводную станцию (101) или морское дно.
23. Автономное модульное подводное транспортное средство (102) по п.13, в котором внешний измерительный модуль (206), оснащенный измерительными датчиками (314), содержит:
- соединительные средства (319), обеспечивающие сцепление измерительного модуля (206) с системой (207) оснащения в подводной многофункциональной станции (101) или с транспортным средством (102);
- средства (320) связи, обеспечивающие синхронизацию измерений, выполняемых измерительными датчиками (314), с измерениями, выполняемыми бортовыми датчиками (311) указанного транспортного средства (102);
- корпус (318) и
- управляющий блок (316) для управления функционированием измерительных датчиков (314), регулировкой и распределением подачи энергии и взаимодействием с транспортным средством (102).
24. Автономное модульное подводное транспортное средство (102) по п.23, в котором указанный внешний измерительный модуль (206) содержит по меньшей мере внутренний источник (315) энергии.
25. Автономное модульное подводное транспортное средство (102) по п.23, в котором управляющий блок (316) и источник (315) энергии заключены по меньшей мере в один водонепроницаемый контейнер (321), выполненный из титана и расположенный в указанном корпусе (318).
26. Автономное модульное подводное транспортное средство (102) по п.24, в котором указанный корпус (318) выполнен из композитного материала или другого материала.
27. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанный измерительный датчик (314), установленный в указанном внешнем измерительном модуле (206), выбран из следующих типов датчиков:
- оптический датчик;
- акустический датчик;
- автоматический анализатор углеводородов;
- автоматический анализатор фенолов;
- автоматический анализатор металлических микроэлементов и
- автоматический анализатор питательных веществ.
| US 5995882 A, 30.11.1999 | |||
| Устройство для автоматической регулировки подача рассола к хлорным ваннам | 1938 |
|
SU56325A1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

