Настоящее изобретение относится к устройству и способу регулирования скорости транспортного средства.
В частности, но не в качестве исключения, изобретение относится к регулированию скорости транспортного средства во время режима автоматического поддержания скорости движения для улучшения экономии топлива и/или выбросов.
Системы автоматического поддержания скорости движения предусмотрены в транспортных средствах для автоматического регулирования скорости транспортного средства без каких бы то ни было входных сигналов, таких как операция педали акселератора, от водителя. Обычно, значение уставки, имеющее отношение к требуемой скорости, определяется водителем. Скорость транспортного средства автоматически регулируется до тех пор, пока водитель не вмешивается, например приведением в действие одного или более из тормоза, сцепления, акселератора или переключателя режима.
Известные системы адаптивного автоматического поддержания скорости движения также предусматривают управление типа автоматического торможения или динамически устанавливаемой скорости. Системы автоматического торможения предоставляют транспортному средству возможность идти наравне с автомобилем, за которым оно следует, замедляться при сближении с транспортным средством впереди и вновь ускоряться до пороговой скорости, когда предоставляет возможность дорожное движение. Динамически устанавливаемая скорость использует положение GPS или знаки ограничения скорости для установления пороговой скорости.
Существующие алгоритмы регулирования скорости могут точно поддерживать скорость транспортного средства на пороговой скорости, даже при меняющихся уклонах дороги. Однако эти алгоритмы не оптимизированы относительно экономии топлива или выбросов. Известно, что, даже при проезде меняющихся уклонов дорог с умеренными углами наклона, это может осуществляться более экономично квалифицированным водителем. Водитель может поддерживать относительно неизменное положение дросселя и позволять транспортному средству ускоряться на нисходящих уклонах и замедляться на восходящих уклонах, водитель снижает мощность при достижении вершины подъема и повышает мощность перед тем, как достигнут восходящий уклон. Известные системы автоматического поддержания скорости движения имеют склонность осуществлять избыточное дросселирование на восходящих уклонах и тормозить на нисходящих уклонах, таким образом, растрачивая впустую энергию, имеющуюся в распоряжении от инерции транспортного средства.
Двигатели внутреннего сгорания работают эффективнее в показателях удельного расхода топлива при торможении (BSFC) на конкретной комбинации числа оборотов и крутящего момента двигателя. Однако при крейсерском движении на постоянной скорости двигатель может быть далек от оптимальной рабочей точки BSFC.
Большинство спидометров имеют допуск около ±10%. Производители транспортных средств обычно калибруют спидометры, чтобы показывали завышенное значение на величину, равную средней погрешности, чтобы гарантировать, что спидометр не указывает более низкую скорость, чем фактическая скорость транспортного средства.
Согласно первому аспекту настоящего изобретения предложен способ автоматического регулирования скорости транспортного средства, включающий:
прием от водителя входного сигнала для входа в режим автоматического поддержания скорости движения;
определение пороговой скорости;
повышение скорости транспортного средства до скорости, которая на первое заданное значение или долю выше пороговой скорости;
снижение скорости транспортного средства до скорости, которая на второе заданное значение или долю ниже пороговой скорости;
повторение этапов повышения и снижения скорости транспортного средства до приема входного сигнала для выхода из режима автоматического поддержания скорости движения.
Пороговая скорость может по меньшей мере в начале соответствовать текущей скорости транспортного средства. Пороговая скорость может регулироваться водителем во время режима автоматического поддержания скорости движения.
Этап повышения скорости транспортного средства может включать увеличение количества топлива, подаваемого в двигатель, чтобы вызывать ускорение транспортного средства.
Этап снижения скорости транспортного средства может включать уменьшение количества топлива, подаваемого в двигатель, чтобы вызывать замедление транспортного средства. В качестве альтернативы, этап снижения скорости транспортного средства может включать отцепление колес транспортного средства от двигателя. Этап снижения скорости транспортного средства может включать расцепление муфты трансмиссии транспортного средства.
В качестве альтернативы или в дополнение по меньшей мере один из этапов повышения и снижения скорости транспортного средства может включать пассивное повышение или снижение, соответственно, скорости транспортного средства вследствие уклонов дороги, сокращения мощности двигателя или тому подобного. Поэтому термины «повышение» и «снижение» включают в себя принятие действия, которое непосредственно вызывает или пассивно предоставляет возможность изменения скорости.
Первое заданное значение или доля могут быть по существу равными второму заданному значению или доле.
По меньшей мере одно из первого и второго заданных значений может зависеть от по меньшей мере одного параметра двигателя. По меньшей мере одно из первого и второго заданных значений может зависеть от значения удельного расхода топлива при торможении для соответствующей скорости транспортного средства. По меньшей мере одно из первого и второго заданных значений может выбираться, чтобы выдавать оптимальное значение удельного расхода топлива при торможении у двигателя.
По меньшей мере одно из первого и второго заданных значений может быть заданной долей или процентом свыше пороговой скорости. Заданный процент может быть 10% или менее.
Способ может включать в себя обеспечение средства управления, содержащего процессор и память для выполнения способа. Заданные значения или доли могут включать значения или доли, хранимые в памяти.
В качестве альтернативы, заданные значения или доли могут определяться по хранимому в памяти. Заданные значения или доли могут определяться в реальном времени. Заданные значения или доли могут определяться непосредственно перед изменением скорости транспортного средства.
Способ может включать в себя обеспечение средства для по меньшей мере уменьшения звуковых, визуальных или тактильных явлений, связанных с повторным изменением скорости транспортного средства.
Средство может включать изменение звука, вырабатываемого двигателем. Средство может включать изменение рабочего цикла двигателя.
Средство может включать выполнение этапов для изменения скорости транспортного средства с интенсивностью, которая менее ощутима для водителя.
Средство может включать изменение показания тахометра. Средство может включать использование фильтра, такого как алгоритм фильтрации, для изменения показания тахометра.
Способ может включать в себя адаптивное регулирование скорости транспортного средства. Способ может включать в себя обнаружение транспортного средства впереди и определение расстояния до транспортного средства впереди. Способ может включать в себя поддержание транспортного средства в пределах диапазона расстояния до транспортного средства впереди. Этап по меньшей мере одного из повышения скорости транспортного средства, снижения скорости транспортного средства, расчета первого заданного значения и расчета второго заданного значения может зависеть от расстояния до транспортного средства впереди.
Согласно второму аспекту настоящего изобретения предложено устройство автоматического регулирования скорости для транспортного средства, содержащее:
средство ввода, выполненное с возможностью обеспечения водителю входа и выхода из режима автоматического поддержания скорости движения;
средство управления, содержащее процессор и память, при этом в ответ на операцию средства ввода для входа в режим автоматического поддержания скорости движения, средство управления выполнено с возможностью:
определения пороговой скорости;
повышения скорости транспортного средства до скорости, которая на первое заданное значение или долю выше пороговой скорости;
снижения скорости транспортного средства до скорости, которая на второе заданное значение или долю ниже пороговой скорости;
повторения этапов повышения и снижения скорости транспортного средства до приема входного сигнала от водителя для выхода из режима автоматического поддержания скорости движения.
Заданные значения или доли могут включать значения или доли, хранимые в памяти.
В качестве альтернативы, заданные значения или доли могут определяться по алгоритму, хранимому в памяти. Заданные значения или доли могут определяться в реальном времени. Заданные значения или доли могут определяться непосредственно перед изменением скорости транспортного средства.
Пороговая скорость может по меньшей мере в начале соответствовать текущей скорости транспортного средства. Средство управления может управляться водителем для регулирования пороговой скорости во время режима автоматического поддержания скорости движения.
Устройство может быть функционально присоединено к системе подачи топлива транспортного средства. Устройство может быть выполнено с возможностью по меньшей мере для одного из увеличения или уменьшения количества топлива, подаваемого в двигатель, чтобы вызывать ускорение транспортного средства.
Устройство может быть функционально присоединено к трансмиссии транспортного средства. Устройство может быть выполнено с возможностью отцепления колес транспортного средства от двигателя. Устройство может быть выполнено с возможностью расцепления муфты трансмиссии транспортного средства.
Устройство может включать в себя один или более датчиков для считывания по меньшей мере одного параметра двигателя. Устройство может быть выполнено с возможностью изменения скорости транспортного средства в зависимости от по меньшей мере одного считанного параметра двигателя.
Процессор может быть выполнен с возможностью определения значения удельного расхода топлива при торможении. По меньшей мере одно из первого и второго заданных значений может зависеть от значения удельного расхода топлива при торможении для соответствующей скорости транспортного средства. По меньшей мере одно из первого и второго заданных значений может выбираться, чтобы выдавать оптимальное значение удельного расхода топлива при торможении у двигателя.
Устройство может включать в себя средство для по меньшей мере уменьшения звуковых, визуальных или тактильных явлений, связанных с повторным изменением скорости транспортного средства.
Устройство может быть устройством адаптивного автоматического регулирования скорости. Устройство может включать в себя систему обнаружения, такую как радиолокатор, для обнаружения транспортного средства впереди и определения расстояния до транспортного средства впереди. Устройство может быть выполнено с возможностью поддержания транспортного средства в пределах диапазона расстояния до транспортного средства впереди.
Варианты осуществления настоящего изобретения далее будут описаны, только в качестве примера, со ссылкой на прилагаемые чертежи, на которых:
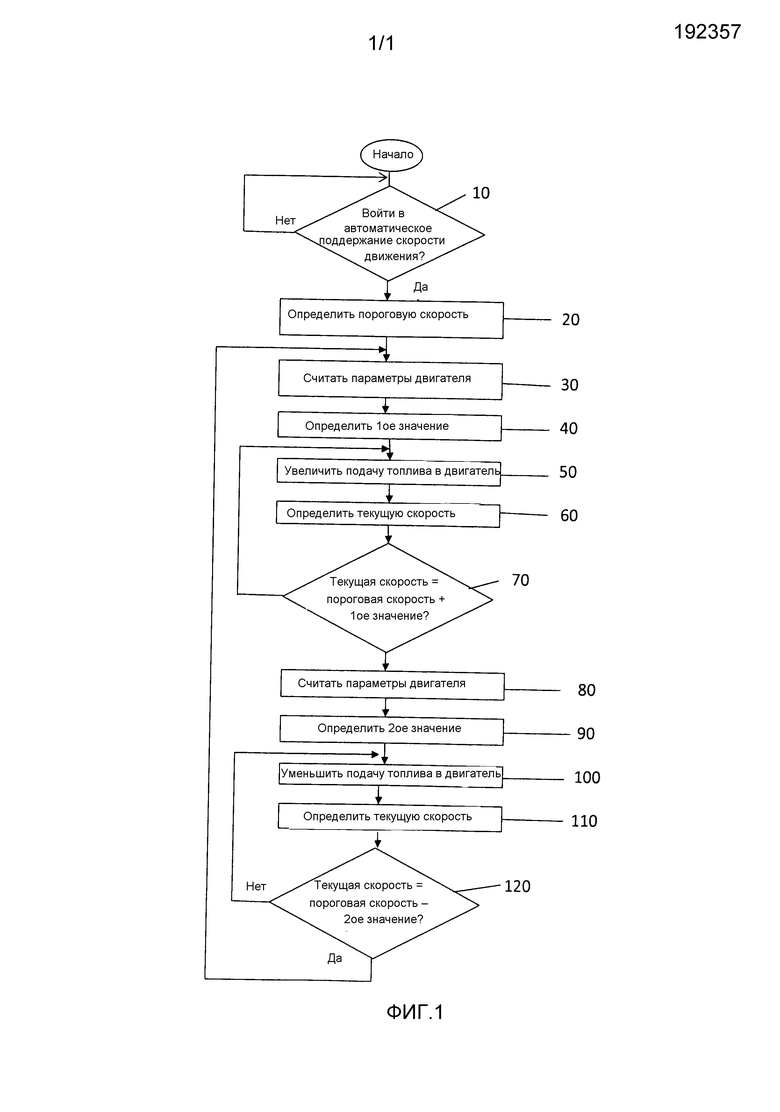
Фиг. 1 представляет собой блок-схему последовательности операций способа согласно изобретению.
Фиг. 1 показывает способ автоматического регулирования скорости транспортного средства. Способ выполняется устройством автоматического регулирования скорости. Это устройство может быть частью блока управления двигателем (ECU) транспортного средства или отдельным компонентом, присоединенным к ECU. Устройство включает в себя средство управления, содержащее процессор и память, и различные датчики для измерения параметров двигателя и скорости транспортного средства.
Устройство также включает в себя средство, такое как переключатель, которое является управляемым водителем, чтобы заставлять устройство входить в режим автоматического поддержания скорости движения. На этапе 10 процессор непрерывно контролирует состояние переключателя. Если приведено в действие, устройство входит в режим автоматического поддержания скорости движения и переходит на этап 20.
Процессор определяет пороговую скорость. Это сначала соответствует текущей скорости транспортного средства, а значит, процессор устанавливает пороговую скорость в считанную текущую скорость. Однако процессор может быть приспособлен, из условия чтобы пороговая скорость была настраиваемой водителем во время автоматического поддержания скорости движения.
Затем, на этапе 30, считываются различные параметры двигателя и, на этапе 40, определяется первое заданное значение. Это значение является зависящим от параметров двигателя и выбирается, чтобы давать оптимальную характеристику удельного расхода топлива (BSFC) у двигателя. Однако также может применяться верхний предел, такой как, что первое заданное значение не является большим чем 10% пороговой скорости.
На этапе 50 процессор отправляет сигнал для увеличения количества топлива, подаваемого в двигатель. Это вызывает повышение скорости транспортного средства.
На этапе 60 считывается текущая скорость транспортного средства. Процессор включает в себя блок сравнения, и, на этапе 70, текущая скорость транспортного средства сравнивается с суммой пороговой скорости и первого заданного значения. Если текущая скорость транспортного средства является меньшей, чем эта сумма, то способ возвращается на этап 50, чтобы дальше увеличивать подачу топлива. Если текущая скорость транспортного средства достигла или превысила сумму, то способ продолжается до этапа 80.
На этапе 80 различные параметры двигателя вновь считываются и, на этапе 90, определяется второе заданное значение. Это значение также выбирается, чтобы давать оптимальную характеристику BSFC у двигателя. Оптимальное значение BSFC должно будет измениться, так как оно является зависящим от числа оборотов двигателя, которое должно будет измениться, так как была изменена скорость транспортного средства. Нижний предел не должен применяться для избежания превышения скорости, но может применяться для ограничения амплитуды колебаний вокруг пороговой скорости.
На этапе 100 процессор отправляет сигнал для уменьшения количества топлива, подаваемого в двигатель. Это вызывает снижение скорости транспортного средства.
На этапе 110 вновь считывается текущая скорость транспортного средства. Процессор затем сравнивает текущую скорость транспортного средства с разностью пороговой скорости и второго заданного значения. Если текущая скорость транспортного средства является большей, чем эта разность, то способ возвращается на этап 100, чтобы дальше уменьшать подачу топлива.
Если текущая скорость транспортного средства снизилась, так что она является равной или меньшей, чем рассчитанная разность, то способ возвращается на этап 30. Поэтому способ повторяет этапы увеличения и уменьшения скорости транспортного средства. Это продолжается до тех пор, пока не принимается входной сигнал для выхода из режима автоматического поддержания скорости движения. Это может происходить от водителя, но могло бы быть из другого источника, например, из системы предупреждения столкновений.
В альтернативном варианте осуществления этап снижения скорости транспортного средства может включать в себя отцепление колес транспортного средства от двигателя, например, посредством расцепления муфты трансмиссии транспортного средства.
Настоящее изобретение предоставляет возможность небольших колебаний скорости транспортного средства вокруг пороговой скорости, для того чтобы работать на или близко к оптимальному BSFC. С использованием этого пульсирующего подхода скорость транспортного средства будет иметь среднее значение около пороговой скорости, но потребление топлива будет снижаться по сравнению с режимом постоянного снабжения топливом.
Вышеприведенный способ может оказывать влияние на характеристики транспортного средства и/или двигателя, такие как характеристики шума, вибрации и неплавности движения (NVH). Различные средства могут использоваться для смягчения этого. Таковые могут включать в себя меняющийся рабочий цикл, минимизацию амплитуды отклонений от пороговой скорости и ограничение агрессивности приведения в действие/вывода из работы снабжения топливом/дросселя.
Некоторые из средств повышения и понижения скорости транспортного средства включают в себя быстрые и/или большие изменения числа оборотов двигателя, а это может быть заметным водителю по показанию тахометра. Это может смягчаться с использованием алгоритма фильтрации тахометра.
Изобретение может содержать способ и устройство адаптивного регулирования скорости, которые используют радиолокационную систему переднего обзора для выявления расстояния до транспортного средства впереди. Это расстояние может динамически управляться, чтобы обеспечивать возможность повышения и снижения скорости транспортного средства.
Несмотря на то что выше были описаны конкретные варианты осуществления настоящего изобретения, следует понимать, что отклонения от описанных вариантов осуществления по-прежнему могут подпадать под объем настоящего изобретения.
Изобретение относится к регулированию скорости транспортного средства во время режима автоматического поддержания скорости движения для улучшения экономии топлива и/или выбросов. Предложен способ автоматического регулирования скорости транспортного средства, включающий: прием от водителя входного сигнала для входа в режим автоматического поддержания скорости движения; определение пороговой скорости; повышение скорости транспортного средства до скорости, которая на первое заданное значение или долю выше пороговой скорости; снижение скорости транспортного средства до скорости, которая на второе заданное значение или долю ниже пороговой скорости; и повторение этапов повышения и снижения скорости транспортного средства до приема входного сигнала для выхода из режима автоматического поддержания скорости движения. Также способ включает обнаружение транспортного средства впереди, определение расстояния до транспортного средства впереди, поддержание транспортного средства впереди в пределах диапазона расстояния до транспортного средства впереди и расчет первого заданного значения и второго заданного значения в зависимости от расстояния до транспортного средства впереди. Предложено также устройство автоматического регулирования скорости транспортного средства. Достигается улучшение экономии топлива, снижение выбросов. 2 н. и 34 з.п. ф-лы, 1 ил.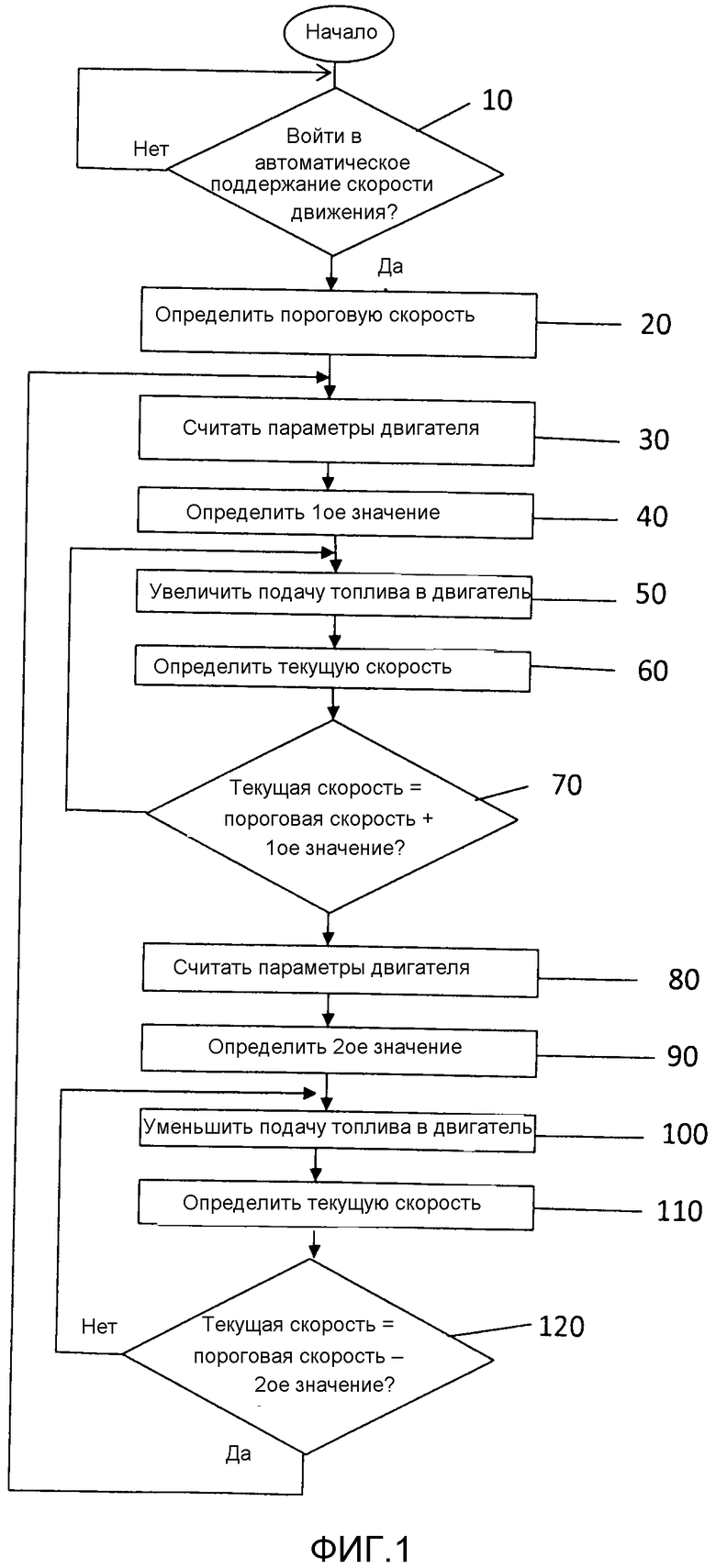
1. Способ автоматического регулирования скорости транспортного средства, включающий:
прием от водителя входного сигнала для входа в режим автоматического поддержания скорости движения;
определение пороговой скорости;
повышение скорости транспортного средства до скорости, которая на первое заданное значение или долю выше пороговой скорости;
снижение скорости транспортного средства до скорости, которая на второе заданное значение или долю ниже пороговой скорости; и
повторение этапов повышения и снижения скорости транспортного средства до приема входного сигнала для выхода из режима автоматического поддержания скорости движения, и
дополнительно включающий обнаружение транспортного средства впереди, определение расстояния до транспортного средства впереди, поддержание транспортного средства впереди в пределах диапазона расстояния до транспортного средства впереди и расчет первого заданного значения и второго заданного значения в зависимости от расстояния до транспортного средства впереди.
2. Способ по п. 1, в котором пороговая скорость по меньшей мере вначале соответствует текущей скорости транспортного средства.
3. Способ по п. 1 или 2, в котором пороговая скорость регулируется водителем во время режима автоматического поддержания скорости движения.
4. Способ по п. 1 или 2, в котором этап повышения скорости транспортного средства включает увеличение количества топлива, подаваемого в двигатель, чтобы вызвать ускорение транспортного средства.
5. Способ по п. 1 или 2, в котором этап снижения скорости транспортного средства включает уменьшение количества топлива, подаваемого в двигатель, чтобы вызвать замедление транспортного средства.
6. Способ по п. 1 или 2, в котором этап снижения скорости транспортного средства включает отцепление колес транспортного средства от двигателя.
7. Способ по п. 6, в котором этап снижения скорости транспортного средства включает расцепление муфты трансмиссии транспортного средства.
8. Способ по п. 1 или 2, в котором по меньшей мере один из этапов повышения и снижения скорости транспортного средства включает пассивное повышение или снижение, соответственно, скорости транспортного средства вследствие одного или обоих из уклонов дороги и сокращения мощности двигателя.
9. Способ по п. 1 или 2, в котором первое заданное значение или доля по существу равна второму заданному значению или доле.
10. Способ по п. 1 или 2, в котором по меньшей мере одно из первого и второго заданных значений зависит от по меньшей мере одного параметра двигателя.
11. Способ по п. 10, в котором по меньшей мере одно из первого и второго заданных значений зависит от значения удельного расхода топлива при торможении для соответствующей скорости транспортного средства.
12. Способ по п. 11, в котором по меньшей мере одно из первого и второго заданных значений выбирается для выдачи оптимального значения удельного расхода топлива при торможении у двигателя.
13. Способ по п. 1 или 2, в котором по меньшей мере одна из первой и второй заданных долей является заданной долей или процентом свыше пороговой скорости.
14. Способ по п. 13, в котором заданный процент составляет 10% или менее.
15. Способ по п. 1 или 2, включающий обеспечение средства управления, содержащего процессор и память для выполнения способа.
16. Способ по п. 15, в котором заданные значения или доли содержат значения или доли, хранимые в памяти.
17. Способ по п. 15, в котором заданные значения или доли определяются по хранимому алгоритму.
18. Способ по п. 17, в котором заданные значения или доли определяются в реальном времени.
19. Способ по п. 17 или 18, в котором заданные значения или доли определяются непосредственно перед изменением скорости транспортного средства.
20. Способ по п. 1, включающий обеспечение средства для по меньшей мере уменьшения звуковых, визуальных или тактильных явлений, связанных с повторным изменением скорости транспортного средства.
21. Способ по п. 20, в котором средство содержит изменение звука, вырабатываемого двигателем.
22. Способ по п. 21, в котором средство содержит изменение рабочего цикла двигателя.
23. Способ по любому из пп. 20-22, в котором средство содержит выполнение этапов для изменения скорости транспортного средства с интенсивностью, которая менее ощутима для водителя.
24. Способ по любому из пп. 20-22, в котором средство содержит изменение показания тахометра.
25. Способ по п. 24, в котором средство содержит использование фильтра для изменения показания тахометра.
26. Способ по п. 1 или 2, включающий адаптивное регулирование скорости транспортного средства.
27. Устройство автоматического регулирования скорости транспортного средства, содержащее:
средство ввода, выполненное с возможностью обеспечения водителю входа и выхода из режима автоматического поддержания скорости движения; и
средство управления, содержащее процессор и память, при этом в ответ на операцию средства ввода для входа в режим автоматического поддержания скорости движения, средство управления выполнено с возможностью:
определения пороговой скорости;
повышения скорости транспортного средства до скорости, которая на первое заданное значение или долю выше пороговой скорости;
снижения скорости транспортного средства до скорости, которая на второе заданное значение или долю ниже пороговой скорости; и
повторения этапов повышения и снижения скорости транспортного средства до приема входного сигнала от водителя для выхода из режима автоматического поддержания скорости движения; и
систему обнаружения для обнаружения транспортного средства впереди и определения расстояния до транспортного средства впереди, при этом устройство выполнено с возможностью поддержания транспортного средства впереди в пределах диапазона расстояния до транспортного средства впереди.
28. Устройство по п. 27, в котором заданные значения или доли содержат значения или доли, хранимые в памяти.
29. Устройство по п. 27, в котором заданные значения или доли определяются по алгоритму, хранимому в памяти.
30. Устройство по любому из пп. 27-29, которое функционально присоединено к системе подачи топлива транспортного средства и выполнено с возможностью по меньшей мере для одного из увеличения или уменьшения количества топлива, подаваемого в двигатель, чтобы вызывать изменение скорости транспортного средства.
31. Устройство по любому из пп. 27-29, которое функционально присоединено к трансмиссии транспортного средства и выполнено с возможностью отцепления колеса транспортного средства от двигателя, чтобы вызывать снижение скорости транспортного средства.
32. Устройство по любому из пп. 27-29, включающее в себя один или более датчиков для считывания по меньшей мере одного параметра двигателя, при этом устройство выполнено с возможностью изменения скорости транспортного средства в зависимости от по меньшей мере одного считанного параметра двигателя.
33. Устройство по п. 32, в котором процессор выполнен с возможностью определения значения удельного расхода топлива при торможении, при этом по меньшей мере одно из первого и второго заданных значений зависит от значения удельного расхода топлива при торможении для соответствующей скорости транспортного средства.
34. Устройство по п. 33, в котором по меньшей мере одно из первого и второго заданных значений выбираются для выдачи оптимального значения удельного расхода топлива при торможении у двигателя.
35. Устройство по любому из пп. 27-29, включающее в себя средство для по меньшей мере уменьшения звуковых, визуальных или тактильных явлений, связанных с повторным изменением скорости транспортного средства.
36. Устройство по любому из пп. 27-29, которое является устройством адаптивного автоматического регулирования скорости.
| JP 2007187090 A, 26.07.2007 | |||
| US 2011035135 A1, 10.02.2011 | |||
| US 2011130939 A1, 02.06.2011. |

