ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и модулю для определения заданных значений скорости в соответствии с преамбулой независимых пунктов.
УРОВЕНЬ ТЕХНИКИ
Многие транспортные средства сегодня оборудованы устройством автоматического поддержания скорости для облегчения управления транспортным средством. Желаемая скорость может быть задана водителем, например, при помощи устройства управления в консоли рулевого колеса, и система автоматического поддержания скорости транспортного средства после этого воздействует на систему управления таким образом, чтобы она ускоряла и затормаживала транспортное средство, чтобы сохранить желаемую скорость. Если транспортное средство оборудовано автоматической системой переключения передач, передачи транспортного средства переключаются таким образом, чтобы транспортное средство могло сохранять желаемую скорость.
Когда устройство автоматического поддержания скорости используется на холмистой местности, система автоматического поддержания скорости будет стремиться сохранить заданную скорость на подъемах. Это приводит, среди прочего, к ускорению транспортного средства на вершине холма и, возможно, при последующем спуске, вызывая необходимость торможения для исключения превышения заданной скорости, что является неэкономичным по топливу режимом эксплуатации транспортного средства.
Благодаря изменению скорости транспортного средства на холмистой местности можно экономить топливо по сравнению с обычным устройством автоматического поддержания скорости. Это может быть сделано различными способами, например, посредством вычислений текущего состояния транспортного средства (как с устройством Scania Ecocruise®). Если подъем вычислен, система тогда ускоряет транспортное средство на подъеме. К концу подъема система запрограммирована для исключения ускорения, пока градиент не выровняется наверху, при условии, что скорость транспортного средства не падает ниже определенного уровня. Снижение скорости в конце подъема позволяет восстановить скорость на последующем спуске без использования двигателя для ускорения. Когда транспортное средство приближается к основанию уклона, система пытается использовать кинетическую энергию для начала следующего подъема с более высокой скоростью, чем с обычным устройством автоматического поддержания скорости. Система будет легко обеспечивать ускорение в конце спуска, чтобы сохранить количество движения транспортного средства. На холмистой местности это означает, что транспортное средство начинает следующий подъем с более высокой скоростью, чем нормальная. Исключение ненужного ускорения и использование кинетической энергии транспортного средства позволяют экономить топливо.
Если топология впереди известна транспортному средству, имеющему данные карты и систему глобального позиционирования, такая система может быть сделана более надежной и также может изменять скорость транспортного средства с упреждением.
Транспортное средство обычно имеет ряд электронных управляющих блоков, которые управляют различными электронными системами в транспортном средстве. Двигателем в транспортном средстве часто управляет собственный электронный управляющий блок, называемый системой управления двигателем. Логика устройства автоматического поддержания скорости движения может быть расположена в системе управления двигателем, но это иногда невозможно, поскольку система управления двигателем имеет слишком малую область памяти и/или уже высокую нагрузку на процессор. Когда логика находится в некотором другом электронном управляющем блоке, а не в системе управления двигателем, требуемые значения скорости требуется передавать через контроллерную сеть регулятору в системе управления двигателем, который предназначен для регулирования скорости транспортного средства для достижения желаемой скорости.
Традиционный пропорционально-интегрально-дифференциальный регулятор регулирует согласно заданному опорному значению скорости. Поэтому, когда это заданное значение модифицируется логикой устройства автоматического поддержания скорости движения и направляется через контроллерную сеть, он является пропорционально-интегрально-дифференциальным регулятором в системе управления двигателем, который предназначен для регулирования скорости транспортного средства согласно заданному опорному значению. Устройство автоматического поддержания скорости прогнозирует скорость транспортного средства, но остается проблема логики устройства автоматического поддержания скорости движения, пытающейся прогнозировать скорость, тогда как одновременно система управления двигателем пытается управлять скоростью транспортного средства. Регулятор будет управлять в соответствии с постепенно увеличивающейся погрешностью и не будет тогда сообщать двигателю максимальный крутящий момент в начале подъема, который был включен в вычисления прогноза скорости.
Опубликованная заявка на патент США № 2005/0096183 относится к регулятору скорости для транспортного средства на спуске. Холмы здесь конфигурированы как имеющие определенный градиент спуска, и когда водитель включает выключатель градиента, постоянная скорость для транспортного средства устанавливается в течение всего времени включенного состояния выключателя. Постоянная скорость транспортного средства, таким образом, установлена, когда водитель указывает, что транспортное средство находится на холме.
В патенте США № 6076036 устройство автоматического поддержания скорости основано на использовании установки скорости, текущей скорости транспортного средства, ускорения и изменения градиентов дороги, измеренных датчиком, для задания потока топлива для уменьшения его расхода.
Задачей настоящего изобретения является создание усовершенствованного устройства автоматического поддержания скорости транспортного средства, когда скорость транспортного средства должна прогнозироваться при одновременном регулировании, и, в частности, исключение ненужного впрыска топлива в двигатель из-за неустойчивого управляющего сигнала для системы управления двигателем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Указанная выше задача решена посредством создания способа определения заданных значений vref скорости для систем управления транспортными средствами в соответствии с первым независимым пунктом. Способ включает:
A) определение горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута с длиной и характеристиками градиента для каждого участка;
B) вычисление пороговых значений для градиента участков в соответствии с одним или более специфических значений транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории;
C) сравнение градиента каждого участка с пороговыми значениями и помещение каждого участка в пределах горизонта в категорию в соответствии с результатами сравнений;
D) вычисление заданных значений vref скорости для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к категориям, в которые помещены участки в пределах горизонта;
E) добавление отклонения vоffset в расчетные заданные значения vref скорости, когда транспортное средство находится на участке, который находится в категории, указывающей крутой подъем или крутой спуск;
F) регулирование транспортного средства в соответствии с заданными значениями vref скорости.
Изобретение также относится к модулю для определения заданных значений скорости для систем управления транспортными средствами в соответствии со вторым независимым пунктом. Модуль содержит:
- блок горизонта, выполненный с возможностью определения горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута с длиной и характеристиками градиента для каждого участка;
- процессорный блок, выполненный с возможностью вычисления пороговых значений для градиента участков в соответствии с одной или более характеристик транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории; сравнения градиента каждого участка с пороговыми значениями и помещения каждого участка в пределах горизонта в категории в соответствии с результатами сравнений; вычисления заданных значений vref скорости для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к категориям, в которые помещены участки в пределах горизонта; и выполнен с возможностью добавления отклонения vоffset к расчетным заданным значениям vref скорости, когда транспортное средство находится на участке, который находится в категории, указывающей крутой подъем или крутой спуск; затем транспортное средство регулируется в соответствии с заданными значениями vref скорости.
Изобретение обеспечивает снабжение регулятора правильными заданными значениями скорости, позволяющими ему следовать прогнозу скорости транспортного средства. Таким образом, можно обеспечивать максимальный доступный крутящий момент двигателя на крутых подъемах и тормозной момент/нулевой крутящий момент на крутых спусках. Это означает, что погрешность регулирования для регулятора на крутых подъемах является достаточно большой в начале подъема для двигателя, чтобы он был в состоянии выдать максимальный крутящий момент в его начале для предотвращения снижения скорости транспортного средства более, чем необходимо. На крутых спусках выдаются низкие заданные значения постоянной скорости для исключения впрыска топлива в двигатель.
Изобретение также обеспечивает получение способа улучшения характеристик распределенной системы регулирования, в которой традиционные способы прямого воздействия на регулятор, например, отключение или применение более мощных параметров регулятора не могут легко применяться. Это связано с тем, что генератор заданного значения и регулятор находятся в различных блоках управления.
Изобретение также дает преимущество предотвращения увеличения скорости транспортного средства на вершине для достижения его расчетной скорости перед следующим спуском. Это увеличение скорости на вершине обычно является излишним расходом.
Изобретение, таким образом, достигает последовательного регулирования скорости транспортного средства, то есть без снижения скорости, сопровождаемого повышением скорости на вершине.
Предпочтительные варианты осуществления изобретения описаны в зависимых пунктах и в подробном описании.
КРАТКОЕ ОПИСАНИЕ ПРИЛАГАЕМЫХ ЧЕРТЕЖЕЙ
Изобретение описано ниже со ссылками на прилагаемые чертежи, на которых:
фиг.1 - функциональный контекст модуля регулирования в транспортном средстве в соответствии с вариантом осуществления изобретения;
Фиг.2 - блок-схема способа в соответствии с вариантом осуществления изобретения;
Фиг.3 - иллюстрация длины горизонта системы управления относительно длины маршрута для транспортного средства;
фиг.4 - иллюстрация различных прогнозируемых скоростей и категорий участков, которые непрерывно обновляются по мере добавления к горизонту новых участков;
Фиг.5 - иллюстрация разности между устройством согласно изобретению и традиционным устройством автоматического поддержания скорости, в соответствии с вариантом осуществления изобретения; и
фиг.6 - иллюстрация разности между устройством согласно изобретению и традиционным устройством автоматического поддержания скорости, в соответствии с вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ
ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Информация о маршруте транспортного средства может использоваться для регулирования его скорости с упреждением для экономии топлива, повышения безопасности и комфорта. Топография значительно воздействует на управление, в частности, на трансмиссию грузовых автомобилей, так как требуется намного больший крутящий момент при подъеме, чем при спуске, и обеспечение подъема на некоторые возвышения без переключения передач.
Транспортное средство снабжено системой позиционирования и информацией карты, и топологические данные от системы позиционирования и топологические данные от информации карты используются для создания горизонта, который показывает характер маршрута. В описании настоящего изобретения система глобального позиционирования обозначена для определения топологических данных для транспортного средства, но следует понимать, что другие виды глобальных или региональных систем позиционирования также могут рассматриваться для снабжения транспортного средства данными позиционирования, например, систем, в которых используется радиоприемник для определения положения транспортного средства. В транспортном средстве также могут использоваться датчики для сканирования окрестностей и, таким образом, определения его положения.
На фиг.1 показано, как блок включает информацию карты и системы глобального позиционирования о маршруте. Маршрут показан ниже как единственный маршрут для транспортного средства, но следует понимать, что различные потенциальные маршруты включены в систему, как информация от карт и системы глобального позиционирования или других систем позиционирования. Водитель также может регистрировать исходную точку и пункт назначения намеченного маршрута, когда блок использует данные карты и т.д., для вычисления пригодного маршрута. Маршрут или, если существуют две или больше возможных альтернатив, маршруты посылаются поразрядно через контроллерную сеть к модулю для регулирования заданных значений, причем модуль может быть отдельным или может являться частью системы управления, которая должна использовать заданные значения для регулирования скорости транспортного средства. В альтернативном варианте блок с картами и системой позиционирования также может быть частью системы, которая использует заданные значения для регулирования. В модуле регулирования биты соединяются в блоке горизонта для формирования горизонта и обрабатываются процессорным блоком для получения внутреннего горизонта, благодаря которому система управления может регулировать. Если существуют два или больше альтернативных маршрутов, создается множество внутренних горизонтов для альтернативных вариантов. Горизонт или горизонты тогда непрерывно дополняются новыми битами от блока с данными системы глобального позиционирования и данными карты для поддержания желательной длины горизонта. Горизонт, таким образом, непрерывно обновляется, когда транспортное средство находится в движении.
Контроллерная сеть представляет собой систему последовательной шины, специально разработанную для использования в транспортных средствах. Шина данных контроллерной сети обеспечивает обмен цифровыми данными между датчиками, регулирующими компонентами, приводами, управляющими устройствами и т.д. и обеспечивает то, что два или более управляющих устройств могут иметь доступ к сигналам от данного датчика, чтобы использовать их для управляющих компонентов, связанных с ними.
На фиг.2 показана блок-схема, поясняющая этапы, которые содержит способ, соответствующий варианту осуществления изобретения. Пример, описанный ниже, относится только к одному горизонту, но следует понимать, что два или больше горизонтов могут быть созданы для различных альтернативных маршрутов параллельно. Первый этап A) определяет горизонт на основе данных позиционирования и данных карты маршрута, составленный из участков маршрута с характеристиками длины и градиента для каждого участка. Когда транспортное средство находится в движении, модуль горизонта соединяет биты для формирования горизонта маршрута, причем длина горизонта составляет, в типичном случае, от 1 до 2 км. Блок горизонта отслеживает местоположение транспортного средства и непрерывно дополняет горизонт таким образом, чтобы длина горизонта поддерживалась постоянной. В соответствии с вариантом осуществления изобретения, когда пункт назначения находится в пределах длины горизонта, горизонт больше не прибавляется, поскольку движение за пределами пункта назначения не относится к делу.
Горизонт составлен из участков маршрута, которые имеют характеристики в форме связанных с ними длиной и градиентом. Горизонт здесь иллюстрируется матричной формой, в которой каждая колонка содержит характеристику для участка. Матрица, покрывающая маршрут на 80 м вперед, может иметь следующую форму:

где первая колонка - это длина (dx) каждого участка в метрах, а вторая колонка - это градиент в % каждого участка. Матрицу следует рассматривать таким образом, что для 20 м вперед от настоящего положения транспортного средства градиент составляет 0,2%, после чего следуют 20 м с градиентом 0,1% и так далее. Величины для участков и градиенты могут не быть выражены в относительных значениях, но могут, вместо этого, быть выражены в абсолютных величинах. Матрица, предпочтительно, имеет векторную форму, но может, вместо этого, иметь структуру указателя в форме пакетов данных и т.п. Существуют различные другие потенциальные характеристики для участков, например, радиус кривизны, дорожные знаки, различные препятствия и т.д.
Затем участки в пределах горизонта размещаются в различных категориях на этапе B), в котором пороговые значения вычисляются для градиента участков в соответствии с одной или более характеристик транспортного средства, причем указанные пороговые значения служат граничными значениями для назначения участков в различные категории. Пороговые значения для градиента вычисляются, в соответствии с вариантом осуществления изобретения, при помощи одной или более характеристик транспортного средства, например, текущего передаточного отношения, текущего веса транспортного средства, максимальной кривой вращающего момента двигателя, механического трения и/или сопротивления движению транспортного средства с данной скоростью. Модель транспортного средства в системе управления используется для оценки сопротивления движению с данной скоростью. Передаточное отношение и максимальный крутящий момент являются известными величинами в системе управления транспортного средства, и вес транспортного средства оценивается в оперативном режиме.
Далее приведены примеры пяти различных категорий, в которые могут быть размещены участки:
Горизонтальная дорога: участок с градиентом 0 ± отклонение.
Крутой подъем: участок со слишком крутым градиентом для транспортного средства для поддержания скорости на текущей передаче.
Плавный подъем: участок с градиентом между отклонением и пороговым значением для крутого подъема.
Крутой спуск: участок с таким крутым наклонным градиентом, что транспортное средство ускоряется градиентом.
Плавный спуск: участок с наклонным градиентом между отрицательным отклонением и пороговым значением для крутого спуска.
Для помещения участков в указанные выше категории пороговые значения, таким образом, вычисляются в форме двух пороговых значений lmin и lmax градиента, где lmin - это минимальный градиент для транспортного средства, ускоряемого градиентом спуска, и lmax - это максимальный градиент, при котором транспортное средство может поддерживать скорость без переключения передачи при подъеме. Таким образом, скорость транспортного средства может регулироваться в соответствии с градиентом и участком дороги впереди таким образом, чтобы транспортное средство могло двигаться в экономном по топливу режиме при помощи устройства автоматического поддержания скорости движения на холмистой местности. Например, отклонение для категории "горизонтальная дорога", предпочтительно, составляет от 0,05% до -0,05%, когда транспортное средство движется со скоростью 80 км/ч. На основе этой же скорости (80 км/ч), lmin обычно вычисляется в диапазоне от -2 до -7%, и lmax обычно составляет 1-6%. Однако эти величины значительно зависят от текущего передаточного отношения (передача + постоянное передаточное число задней оси), характеристик двигателя и общего веса.
На следующем этапе C) способ предусматривает сравнение градиента каждого участка с пороговыми значениями и помещение каждого участка в пределах горизонта в категории в соответствии с результатами сравнений.
После помещения каждого участка в пределах горизонта в категорию внутренний горизонт для системы управления может быть создан на основе классификации участков и горизонта. На этапе D) осуществляется вычисление заданных значений vref скорости для системы управления транспортным средством согласно горизонту в соответствии с правилами, относящимися к категориям, в которые помещены участки в пределах горизонта. Внутренний горизонт содержит входные скорости vi для каждого участка, которые являются скоростями, которые должна соблюдать система управления. Для каждого участка также существует конечная скорость vslut, которая равна входной скорости vi для следующего участка. Эти входные скорости vi и конечные скорости vslut, таким образом, являются заданными значениями vref скорости, которыми регулирует система управления транспортного средства.
В соответствии с вариантом осуществления изобретения, затребованное изменение скорости осуществляется линейно между двумя входными скоростями vi для снабжения системы управления заданными значениями vref, которые вызывают постепенное увеличение или уменьшение в скорости транспортного средства. Линейное изменение скорости приводит к вычислению постепенных изменений скорости, которые должны осуществляться для достижения изменения скорости. Другими словами, линейное увеличение скорости достигается посредством линейного изменения. Все участки в пределах горизонта проходятся непрерывно и по мере добавления к горизонту новых участков входные скорости vi корректируются как необходимо на участках в диапазоне расчетной скорости Vset транспортного средства. vset - это расчетная скорость, которая задана водителем и поддержание которой желательно при помощи систем управления транспортного средства в диапазоне, когда транспортное средство находится в движении. Диапазон ограничен двумя скоростями Vmin и vmax, которые могут быть заданы водителем вручную или установлены автоматически вычислениями соответствующего диапазона, предпочтительно, вычисленного в модуле регулирования.
Различные правила для категорий участков, таким образом, регулируют то, как должна корректироваться входная скорость vi для каждого участка. Если участок будет размещен в категории "горизонтальная дорога", изменения входной скорости vi для участка не будут происходить. Управление транспортным средством таким образом, чтобы удовлетворять требованиям комфорта, задействует уравнение Торричелли, приведенное ниже, для вычисления постоянного ускорения или замедления, которые должны прилагаться к транспортному средству:

где vi - это скорость входа в участок, vslut - это скорость транспортного средства в конце участка, а - это постоянное ускорение/замедление и s - это длина участка.
Если участок находится в категории "крутой подъем" или "крутой спуск", конечная скорость vslut для участка прогнозируется посредством решения уравнения (2), приведенного ниже:

где
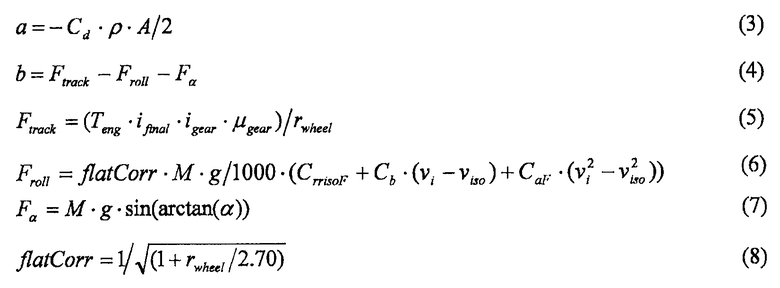
Конечная скорость vslut транспортного средства после конца участка, таким образом, вычисляется в соответствии с этим вариантом осуществления изобретения, на основе входной скорости vi для участка, силы Ftrack, действующей от крутящего момента двигателя в направлении движения транспортного средства, силы Froll от сопротивления качению, воздействующего на колеса транспортного средства, и силы Fa, воздействующей на транспортное средство из-за градиента а участка. Кроме того, Cd - это коэффициент сопротивления воздуха, p - это плотность воздуха, А - это самая большая площадь поперечного сечения транспортного средства, Teng - это крутящий момент двигателя, ifinal - это конечная передача транспортного средства, igear - это текущее передаточное отношение в коробке передач, Мgear - это эффективность зубчатой передачи, rwheel - это радиус колеса транспортного средства, М - это вес транспортного средства, CaF и Cb - это зависимые от скорости коэффициенты, относящиеся к сопротивлению качению колес, CrrisoF - это постоянный член, относящийся к сопротивлению качению колес, и viso - это скорость ISO, например, 80 км/ч.
На участках в категории "крутой подъем" конечная скорость vslut затем сравнивается с Vmin, и если vslut<Vmin, то vi должна быть увеличена таким образом, чтобы

иначе изменение vi не происходит, так как vslut удовлетворяет требованию нахождения в пределах диапазона для расчетной скорости.
На участках в категории "крутой спуск" конечная скорость vslut сравнивается с Vmax, и если vslut>vmax, то vi должна быть уменьшена таким образом, чтобы

иначе изменение vi не происходит, так как vslut удовлетворяет требованию нахождения в пределах диапазона для расчетной скорости.
На участках в категории "плавный подъем" заданное значение vref может изменяться между vmin и vset, когда включен новый участок, то есть, vmin≤vref≤vset. Если vref≥Vmin, ускорение транспортного средства не осуществляется. Однако если vref<vmin, то vref применяется к vmin на протяжении участка, или если vref>vset, то vref линейно изменяется к vset посредством уравнения (1). На участках в категории "плавный спуск" vref может изменяться между vset и vmax, когда включен новый участок, то есть, vset≤vref≤vmax, и если vref≤Vmax, замедление транспортного средства не осуществляется. Однако если vref>vmax, то vref применяется к Vmax на протяжении участка, или если vref<vset, то vref линейно изменяется к vset посредством уравнения (1). Пять указанных выше категорий участка могут быть упрощены до трех посредством удаления категорий "плавный подъем" и "плавный спуск". Категория "горизонтальная дорога" тогда покроет больший диапазон, ограниченный расчетными пороговыми значениями lmin и lmax, и, таким образом, градиент на участке должен быть меньше, чем lmin, если градиент отрицательный, или больше, чем lmax, если градиент положительный.
Когда участок, который следует после участка в пределах горизонта, который находится в категории "плавный подъем" или "плавный спуск", вызывает изменение входных скоростей для участков в этих категориях, это может означать, что входные скорости и, следовательно, заданные скорости для системы управления корректируются и становятся более высокими или низкими, чем задано указанными выше правилами для категорий "плавный подъем" или "плавный спуск". Таким образом, это применяется, когда входные скорости для участков корректируются согласно последующим участкам.
Непрерывное прохождение через все участки в пределах горизонта позволяет определить внутренний горизонт, который представляет прогнозируемые значения vi входной скорости для каждого участка. Непрерывное прохождение участков в пределах горизонта включает непрерывное вычисление входных значений vi для каждого участка, и, таким образом, вычисление входного значения vi может вызывать необходимость изменения, входных значений и вперед, и в обратном направлении во внутреннем горизонте. Где, например, прогнозируемая скорость на участке находится вне заданного диапазона, необходимо скорректировать скорость на предыдущих участках.
На фиг.3 показан внутренний горизонт относительно маршрута. Внутренний горизонт непрерывно перемещается вперед, как обозначено показанным пунктиром перемещающимся вперед внутренним горизонтом. На фиг.4 показан пример внутреннего горизонта, в котором различные участки помещены в категории. На схеме "LR" относится к "горизонтальной дороге", "GU" к "плавному подъему", "SU" к "крутому подъему" и "SD" к "крутому спуску". Первоначально скорость составляет v0, и если она не равна vset, заданные значения линейно изменяются от v0 до vset с соблюдением требований комфорта в соответствии с уравнением Торричелли (1), поскольку категория соответствует "горизонтальной дороге". Следующий участок - это "плавный подъем", и изменение vref не осуществляется, пока vmin≤vref≤vset, поскольку ускорение не должно осуществляться на этом участке. Следующий участок - это "крутой подъем", при этом конечная скорость V3 для него прогнозируется посредством формулы (2), и, таким образом, V2 должна быть увеличена, если V3<Vmin в соответствии с формулой (9). Следующий участок - это "горизонтальная дорога", при этом vref изменяется до vset с ограничением требований комфорта согласно уравнению Торричелли (1). Затем следует участок, который является "крутым спуском", при этом конечная скорость V5 прогнозируется посредством формулы (2), и V4 должна быть уменьшена, если v5>Vmax в соответствии с формулой (10). Как только скорость изменена в обратном направлении во внутреннем горизонте, остающиеся скорости в обратном направлении во внутреннем горизонте корректируются для дополнительной выдачи скорости вперед. При каждом изменении скорости, которое должно быть произведено, согласно способу, соответствующему изобретению, посредством уравнения Торричелли (1) вычисляется, возможно ли достижение изменения скорости с соблюдением требований комфорта. В противном случае, скорость входа в участок корректируется таким образом, чтобы удовлетворялись требования комфорта.
Внутренний горизонт, таким образом, прогнозируется в соответствии с указанными выше правилами, связанными с классификацией участка. Транспортное средство прогрессивно движется вдоль маршрута, и система управления снабжается заданными значениями скорости, при помощи которых она управляет скоростью транспортного средства. Когда транспортное средство находится на участке, который находится в категории, указывающей крутой подъем или крутой спуск, этап E) прибавляет отклонение voffset к расчетным заданным значениям vref скорости. Транспортное средство регулируется в соответствии с заданными значениями vref скорости с отклонением voffset (этап F) до конца крутого подъема или крутого спуска. Затем заданные значения vref скорости снова получают из прогнозируемого внутреннего горизонта. Таким образом, можно компенсировать логику устройства автоматического поддержания скорости движения, находящуюся в некоторой другой системе управления, а не в системе управления двигателем, быстро получая большую погрешность регулирования с начала подъема или малую погрешность регулирования на спуске. Типичная величина для vоffset составляет 5 км/ч, но также могут рассматриваться другие величины. Максимальный крутящий момент двигателя тогда доступен на крутых подъемах, и также существует гарантия, что транспортное средство должно затормаживаться как можно меньше на спуске.
В соответствии с вариантом осуществления изобретения, положительное отклонение, таким образом, добавляется к расчетным заданным значениям vref скорости, когда транспортное средство находится на крутом подъеме. Заданные значения скорости для системы управления транспортным средством затем применяются к vref плюс voffset, вычисленной системой управления, когда транспортное средство находится на крутом подъеме. Участок или участки тогда относятся к "крутому подъему". Максимальный доступный крутящий момент двигателя, таким образом, обеспечивается в начале крутого подъема.
Подобным образом, когда транспортное средство находится на крутом спуске, отрицательное отклонение voffset добавляется к расчетным заданным значениям vref скорости. Заданные значения скорости для системы управления транспортным средством затем применяются к vref плюс -|voffset| вычисленной системой управления, когда транспортное средство находится на крутом спуске. Участок или участки тогда относятся к типу "крутой спуск". Тормозной момент или нулевой крутящий момент, таким образом, обеспечиваются в начале крутых спусков для исключения необходимости торможения на спуске.
В соответствии с вариантом осуществления изобретения, указанное отклонение voffset является переменной величиной по времени для достижения надлежащих критериев рабочих характеристик и комфорта. Например, для предотвращения рывков вследствие быстрых изменений заданных значений, отклонение voffset снижается до нуля в конце крутого подъема. Подобным образом, voffset снижается до нуля в конце крутого спуска.
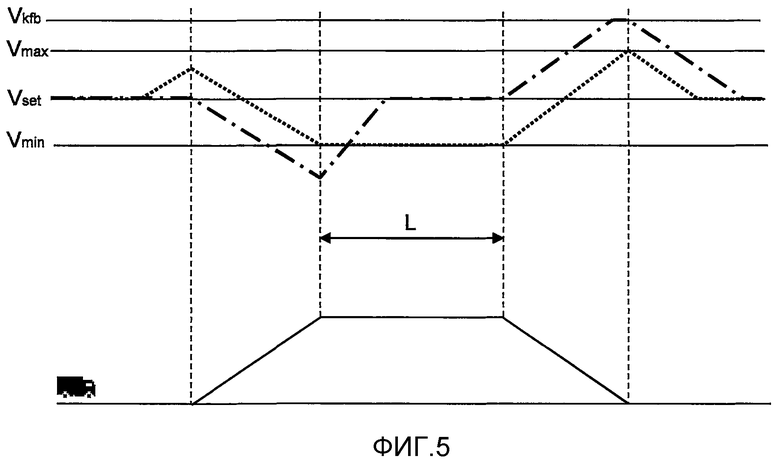
Для исключения потребления излишне большого количества топлива, когда первый крутой подъем или первый крутой спуск сопровождаются крутым подъемом или крутым спуском в пределах определенного расстояния L, вариант осуществления изобретения не допускает ни ускорение, ни замедление транспортного средства в пределах участка L. Только ускорение или замедление для достижения желаемой скорости vref осуществляются перед следующим холмом. Этот вариант осуществления изобретения показан на фиг.5 и фиг.6. Обычное устройство автоматического поддержания скорости представлено штрих-пунктирной линией, и устройство автоматического поддержания скорости в соответствии с этим вариантом осуществления изобретения обозначено пунктиром. Участок L здесь вычислен как покрывающий некоторое расстояние, которое меньше заданного порогового значения. Пороговое значение в соответствии с вариантом осуществления изобретения составляет 250-500 м. L, например, может быть вычислен посредством сложения длин участков, расположенных между холмами. Когда транспортное средство поднялось на холм, как показано на фиг.5, vref задается как его требуемая скорость перед следующим холмом, в этом случае, как Vmin. Эта скорость затем поддерживается по всему участку L, то есть пока транспортное средство проходит, например, крутой спуск. Любая потребность в увеличении скорости транспортного средства, таким образом, исключается, так как оно будет стремиться сохранить скорость vset для уменьшения скорости позже и, таким образом, использования энергии, доступной на спуске, то есть без необходимости торможения транспортного средства. Когда транспортное средство управляется обычным устройством автоматического поддержания скорости, будет требоваться больше энергии для торможения на спуске, как показано на схеме. Vkfb представляет здесь установку замедляющего рабочего тормоза (установку тормоза для постоянной скорости), то есть вспомогательного тормозного устройства автоматического поддержания скорости транспортного средства, которое действует, когда транспортное средство затормаживается на спуске.
Транспортное средство затормаживается для исключения движения со скоростью, превышающей эту установку. Соответственно, энергия сохранена, сохраняя постоянную скорость во время сечения L, как показано на фиг.6. Когда транспортное средство поехало вниз холм на фиг.6, Vref задается как его требуемая скорость перед следующим холмом, в этом случае vmax. Эта скорость затем поддерживается по всему участку L, то есть пока транспортное средство не находится, например, на крутом подъеме. Любая потребность в увеличении скорости транспортного средства, таким образом, исключается, так как транспортное средство будет пытаться сохранить скорость vset.
Настоящее изобретение также относится к модулю для определения заданных значений скорости для систем управления транспортными средствами, как показано на фиг.1. Модуль содержит блок горизонта, выполненный с возможностью определения горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута с длиной и характеристиками градиента для каждого участка. Модуль также содержит процессорный блок, выполненный с возможностью выполнения этапов B)-E), как описано выше, после которых транспортное средство регулируется в соответствии с заданными значениями vref скорости. В результате получен модуль, который может использоваться в транспортном средстве для надежного регулирования заданных значений скорости в случаях, когда модуль находится в электронном управляющем блоке, отличном от электронного управляющего блока транспортного средства, то есть в его системе управления двигателем. Модуль может быть частью системы управления, для которой он предназначен, для регулирования заданных значений, или может быть автономным модулем, отдельным от системы управления.
В соответствии с вариантом осуществления изобретения, когда транспортное средство находится на крутом подъеме, процессорный блок выполнен с возможностью добавления положительного отклонения к расчетным заданным значениям vref скорости. Заданные значения скорости для систем управления транспортными средствами тогда прибавляются к vref плюс voffset, вычисленным системой управления, когда транспортное средство находится на крутом подъеме. Максимальный доступный крутящий момент двигателя, таким образом, обеспечивается в начале крутого подъема.
В соответствии с другим вариантом осуществления изобретения, когда транспортное средство находится на крутом спуске, процессорный блок выполнен с возможностью добавления отрицательного отклонения voffset к расчетным заданным значениям vref скорости. Заданные значения скорости для систем управления транспортными средствами тогда прибавляются к Vref плюс -|voffset|, вычисленным системой управления, когда транспортное средство находится на крутом спуске. Тормозной момент или нулевой крутящий момент, таким образом, обеспечиваются в начале крутых спусков.
В соответствии с вариантом осуществления изобретения, показанным на фиг.5 и 6, когда первый крутой подъем или первый крутой спуск сопровождаются крутым подъемом или крутым спуском в пределах определенного расстояния L, процессорный блок не допускает и ускорения, и замедления транспортного средства в пределах участка L. Как ускорение, так и замедление для достижения желаемой скорости vref применяются перед следующим холмом. Топливо можно экономить посредством такого исключения увеличения скорости транспортного средства, которая затем должна быть снижена, или уменьшения скорости, которая затем должна быть увеличена.
Специфические характеристики транспортного средства относительно текущего передаточного отношения, текущего веса транспортного средства, кривой максимального крутящего момента двигателя, механического трения и/или сопротивления движению транспортного средства с данной скоростью, предпочтительно, определяются процессорным блоком. Пороговые значения, таким образом, могут быть определены на основе состояния транспортного средства в этот момент. Сигналы, необходимые для определения этих величин, могут быть получены из контроллерной сети или могут быть определены соответствующими датчиками.
В соответствии с вариантом осуществления изобретения, характеристиками участков являются их длина и градиент, и процессорный блок выполнен с возможностью вычисления пороговых значений в форме пороговых значений lmin и lmax градиента. Таким образом, скорость транспортного средства может регулироваться в соответствии с волнистостью маршрута для движения в режиме экономии топлива.
В соответствии с другим вариантом осуществления изобретения, блок горизонта выполнен с возможностью определения горизонта при использовании данных позиционирования от системы глобального позиционирования. Географическое положение транспортного средства, таким образом, может определяться непрерывно.
Блок горизонта, предпочтительно, выполнен с возможностью непрерывного определения горизонта, пока горизонт не превышает запланированного маршрута для транспортного средства, и процессорный блок выполнен с возможностью непрерывного осуществления этапов для вычисления и обновления заданных значений для системы управления для полной длины внутреннего горизонта. В варианте осуществления изобретения горизонт, таким образом, создается по частям прогрессивно по мере движения транспортного средства по маршруту. Заданные значения для системы управления вычисляются и обновляются непрерывно независимо от того, прибавлены ли новые участки или нет, так как заданные значения, которые будут вычисляться, зависят также от того, как специфические характеристики транспортного средства изменяются вдоль маршрута.
Настоящее изобретение также включает компьютерное программное обеспечение, содержащее команды компьютерной программы для выполнения компьютерной системой транспортного средства этапов в соответствии со способом, когда команды компьютерной программы выполняются указанной компьютерной системой. Команды компьютерной программы, предпочтительно, хранятся на носителе, который пригоден для считывания компьютерной системой, например, компакт-диске, флэш-памяти, или они могут быть переданы без проводов или по линии в компьютерную систему.
Настоящее изобретение не ограничено описанными выше вариантами его осуществления. Могут использоваться различные альтернативы, модификации и эквиваленты. Приведенные выше варианты осуществления изобретения не ограничивают объем изобретения, который определен прилагаемой формулой изобретения.




Группа изобретений относится к определению заданных значений скорости транспортного средства. Способ определения заданных значений скорости для систем управления транспортными средствами включает определение горизонта при помощи данных позиционирования и данных карты маршрута; вычисление пороговых значений для градиента участков; сравнение градиента каждого участка с пороговыми значениями; вычисление заданных значений скорости для систем управления транспортными средствами согласно горизонту. Дополнительно добавляют отклонения к расчетным заданным значениям скорости и регулируют транспортное средство в соответствии с заданными значениями скорости. Модуль для определения заданных значений скорости содержит блок горизонта и процессорный блок. Процессорный блок вычисляет пороговые значения для градиента участков в соответствии с одним или более значений и вычисляет заданные значения скорости. Блок дополнительно выполнен с возможностью добавления отклонения к расчетным заданным значениям скорости, когда транспортное средство находится на участке крутого подъема или спуска. Решение направлено на снижение расхода топлива. 2 н. и 14 з.п. ф-лы, 6 ил.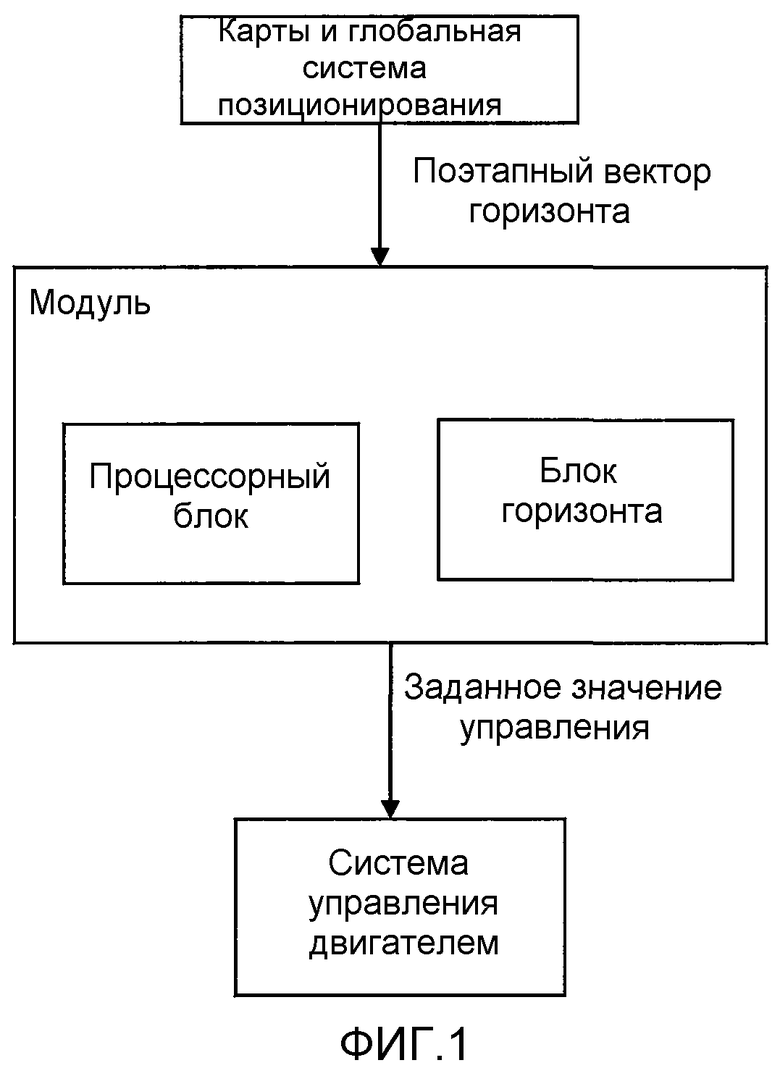
1. Способ определения заданных значений vref скорости для систем управления транспортными средствами, отличающийся тем, что он включает:
A) определение горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута с длиной и характеристиками градиента для каждого участка;
B) вычисление пороговых значений для градиента участков в соответствии с одним или более из значений, специфичных для транспортного средства, причем пороговые значения служат граничными значениями для назначения участков в различные категории;
C) сравнение градиента каждого участка с пороговыми значениями и помещения каждого участка в пределах горизонта в категорию в соответствии с результатами сравнений;
D) вычисление заданных значений vref скорости для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к классам, в которые помещены участки в пределах горизонта;
E) добавление отклонения voffset к расчетным заданным значениям vref скорости, когда транспортное средство находится на участке, который находится в категории, указывающей крутой подъем или крутой спуск; и
F) регулирование транспортного средства в соответствии с заданными значениями vref скорости.
2. Способ по п.1, отличающийся тем, что положительное отклонение voffset добавляют к расчетным заданным значениям vref скорости, когда транспортное средство находится на крутом подъеме.
3. Способ по п.1, отличающийся тем, что отрицательное отклонение voffset добавляют к расчетным заданным значениям скорости, когда транспортное средство находится на крутом спуске.
4. Способ по п.1, отличающийся тем, что отклонение voffset является переменной величиной по времени.
5. Способ по п.1, отличающийся тем, что когда первый крутой подъем или первый крутой спуск сопровождаются крутым подъемом или крутым спуском в пределах определенного расстояния L, ускорение или замедление транспортного средства в пределах участка L не допускается.
6. Способ по п.1, отличающийся тем, что специфические величины транспортного средства определяют текущим передаточным отношением, текущим весом транспортного средства, кривой максимального крутящего момента двигателя, механическим трением и/или сопротивлением движению транспортного средства с данной скоростью.
7. Способ по п.1, отличающийся тем, что пороговые значения вычисляют в форме пороговых значений lmin и lmax градиента.
8. Способ по п.1, отличающийся тем, что горизонт определяют с использованием данных позиционирования от системы глобального позиционирования.
9. Модуль для определения заданных значений скорости для систем управления транспортными средствами, отличающийся тем, что он содержит:
блок горизонта, выполненный с возможностью определения горизонта при помощи данных позиционирования и данных карты маршрута, составленного из участков маршрута с длиной и характеристиками градиента для каждого участка;
процессорный блок, выполненный с возможностью вычисления пороговых значений для градиента участков в соответствии с одним или более значений, специфичных для транспортного средства, причем пороговые значения служат граничными значениями для назначения участков в различные категории; сравнения градиента каждого участка с пороговыми значениями и помещения каждого участка в пределах горизонта в категорию в соответствии с результатами сравнений; вычисления заданных значений vref скорости для систем управления транспортными средствами согласно горизонту в соответствии с правилами, относящимися к категориям, в которые помещены участки в пределах горизонта; и выполненный с возможностью добавления отклонения voffset к расчетным заданным значениям vref скорости, когда транспортное средство находится на участке, который находится в категории, указывающей крутой подъем или крутой спуск, после чего транспортное средство регулируется в соответствии с заданными значениями vref скорости.
10. Модуль по п.9, отличающийся тем, что процессорный блок выполнен с возможностью добавления положительного отклонения voffset к расчетным заданным значениям vref скорости, когда транспортное средство находится на крутом подъеме.
11. Модуль по п.9 или 10, отличающийся тем, что процессорный блок выполнен с возможностью добавления отрицательного отклонения voffset к расчетным заданным значениям vref скорости, когда транспортное средство находится на крутом спуске.
12. Модуль по п.9, отличающийся тем, что указанное отклонение voffset является переменной величиной по времени.
13. Модуль по п.9, отличающийся тем, что, когда первый крутой подъем или первый крутой спуск сопровождаются крутым подъемом или крутым спуском в пределах определенного расстояния L, процессорный блок не допускает ускорения или замедления транспортного средства в пределах участка L.
14. Модуль по п.9, отличающийся тем, что специфические значения транспортного средства определяются текущим передаточным отношением, текущим весом транспортного средства, кривой максимального крутящего момента двигателя, механическим трением и/или сопротивлением движению транспортного средства с данной скоростью.
15. Модуль по п.9, отличающийся тем, что процессорный блок выполнен с возможностью вычисления пороговых значений в форме пороговых значений lmin и lmax градиента.
16. Модуль по п.9, отличающийся тем, что указанный блок горизонта выполнен с возможностью определения горизонта при использовании данных позиционирования от системы глобального позиционирования.
| SE 529578 C2, 25.09.2007 | |||
| US 2004068359 A1, 08.04.2004 | |||
| JP 7117524 A, 09.05.1995 | |||
| US 2003204298 A1, 30.10.2003 | |||
| TW 200800774 A, 01.01.2008. |

