Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к приводимым в действие посредством резонанса электрическим зубным щеткам и, в частности, относится к такой зубной щетке, которая включает в себя чувствительный к давлению механизм.
Предшествующий уровень техники
Использование чувствительного к давлению механизма в зубных щетках, как электрических, так и ручных, в целом хорошо известно и реализовано во множестве конкретных вариантов осуществления. Датчики давления воспринимают силу, приложенную к щетиночной области зубной щетки. Такие датчики могут содержать, например, простую пружину, плечо момента и переключатель. Когда давление возрастает, обычно из-за действия пользователя, прижимающего зубную щетку к зубам, пружина сжимается, что перемещает плечо момента до тех пор, пока не будет достигнуто пороговое максимальное давление, в каковой момент плечо момента перемещается к положению для воздействия на переключатель, что приводит к возникновению сигнала, направленного на индикаторный блок, который обеспечивает пользователю обратную связь. Затем пользователь имеет возможность изменить давление, созданное его собственным действием, до уровня ниже порогового уровня. Однако известные датчики давления для зубных щеток часто являются сложными и, следовательно, дорогими для реализации и во многих случаях не обеспечивают надежных результатов. Таким образом, существует потребность в чувствительном к давлению механизме, который является компактным, простым и относительно недорогим, особенно для использования в приводимой в действие посредством резонанса электрической зубной щетке.
Сущность изобретения
Соответственно, электрическая зубная щетка содержит: ручку, содержащую питаемую энергией приводную систему; блок чистящей головки, включающей в себя плечо чистящей головки и чистящий элемент на его дистальном конце; блок приводного механизма, чувствительный к возбуждающему сигналу питаемого энергией приводного блока, для создания движения блока чистящей головки; магнит, расположенный так, что он перемещается согласно движению блока чистящей головки, при этом магнит создает магнитное поле; датчик Холла, установленный в магнитном поле, при этом отклик магнитного поля имеет сдвиг фазы относительно фазы возбуждающего сигнала; и процессор для определения сдвига фазы выходного сигнала датчика Холла из-за нагрузки на чистящий элемент при чистке, и для создания сигнала, характеризующего указанную нагрузку, в соответствии с хранимой в устройстве информацией, связывающей величины сдвига фазы с нагрузкой.
Краткое описание чертежей
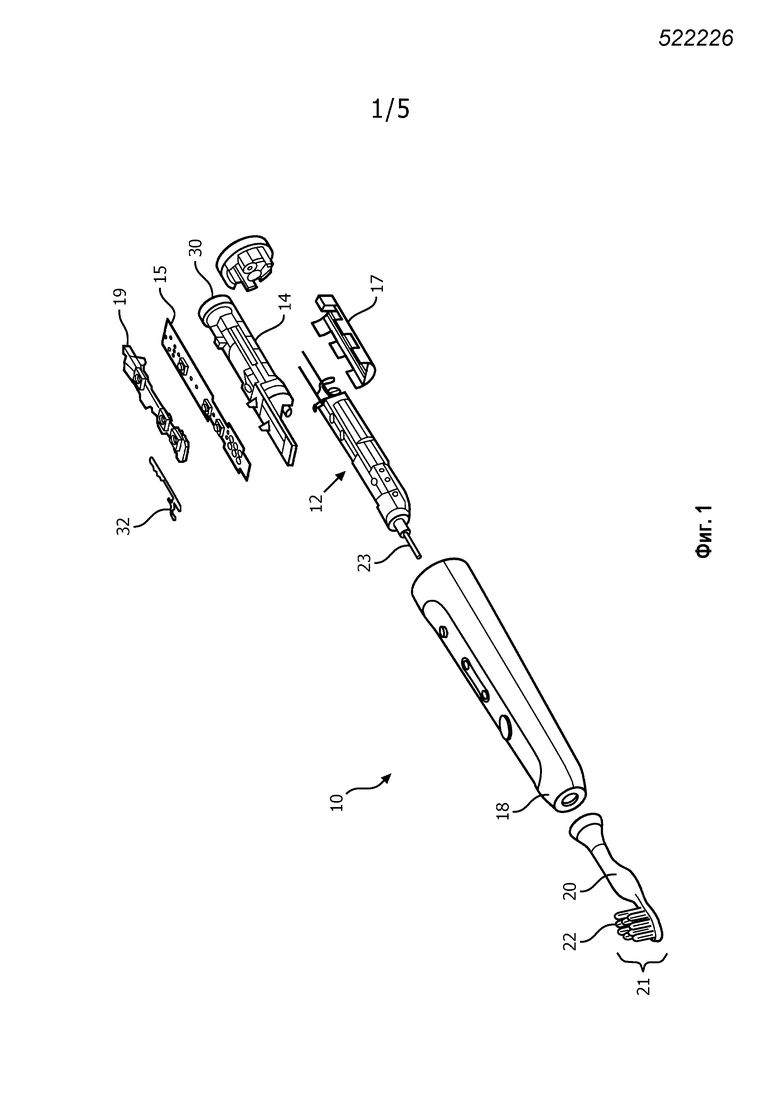
Фиг. 1 - изометрическое изображение участка электрической зубной щетки, которая включает в себя чувствительную к давлению систему, раскрытую в настоящем документе.
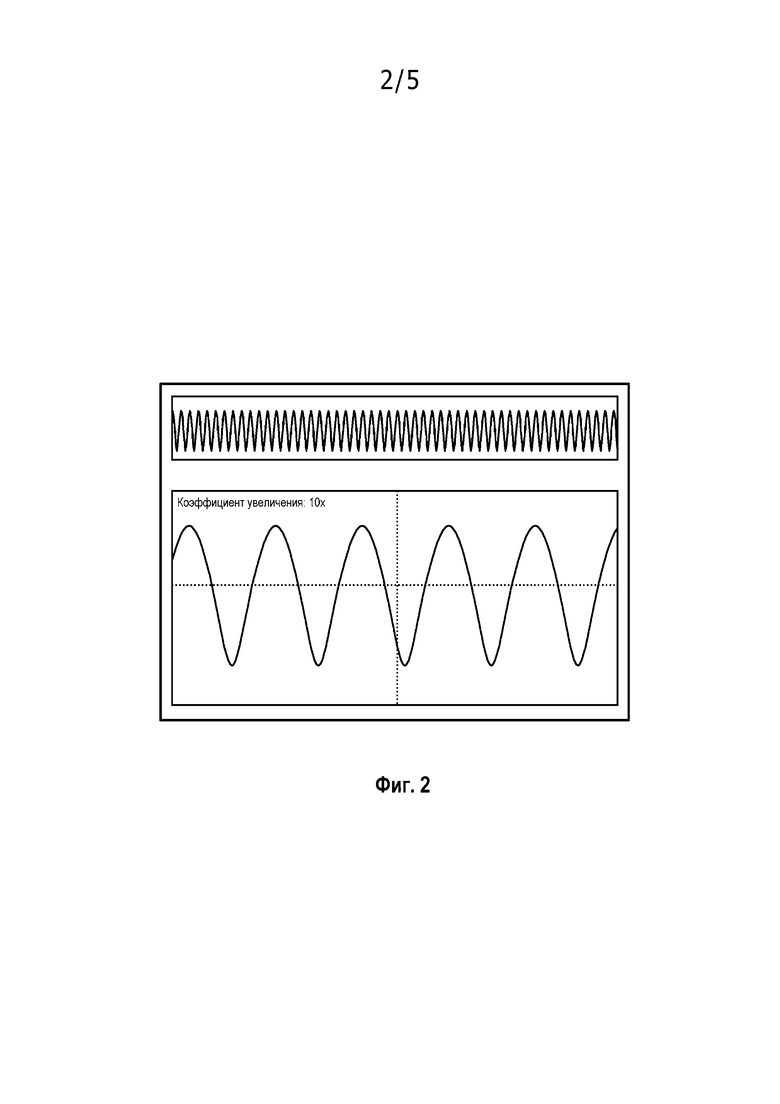
Фиг. 2 - график типичного выходного сигнала от датчика Холла настоящей системы.
Фиг. 3 - выходной сигнал полуцикла датчика Холла с выходным сигналом, калиброванным относительно возбуждающего сигнала для устройства.
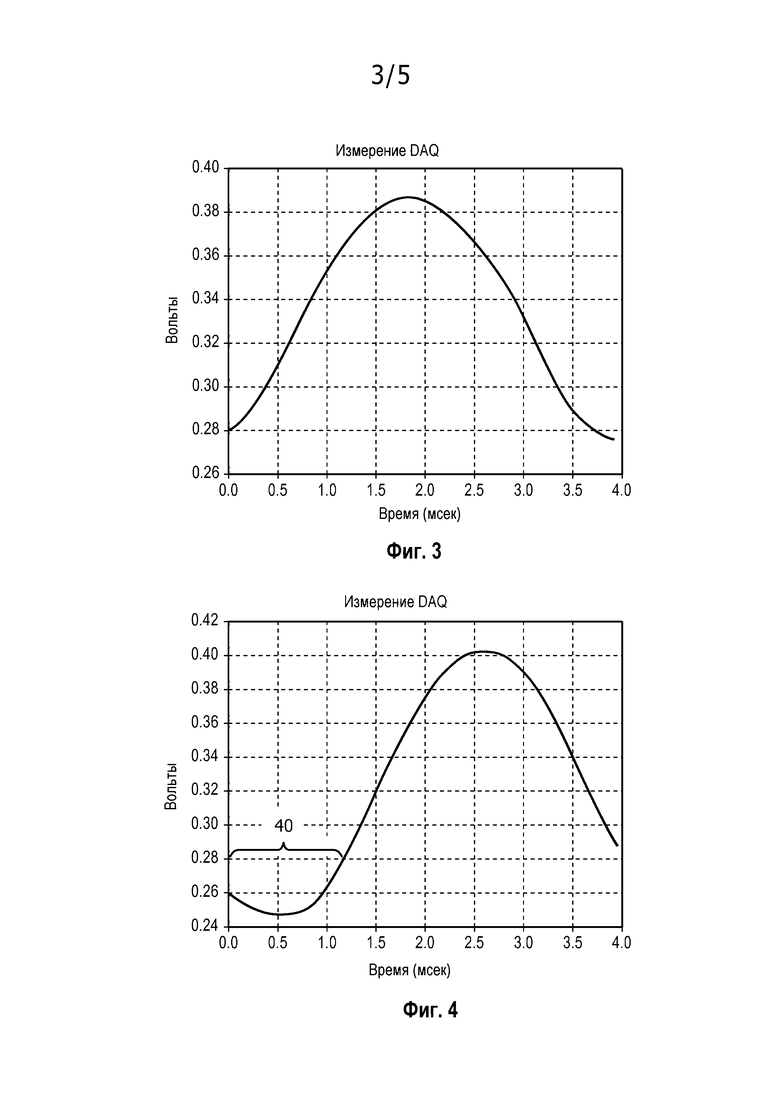
Фиг. 4 - график, аналогичный таковому на фиг. 3, представляющий сдвиг фазы в выходном сигнале из-за нагрузки.
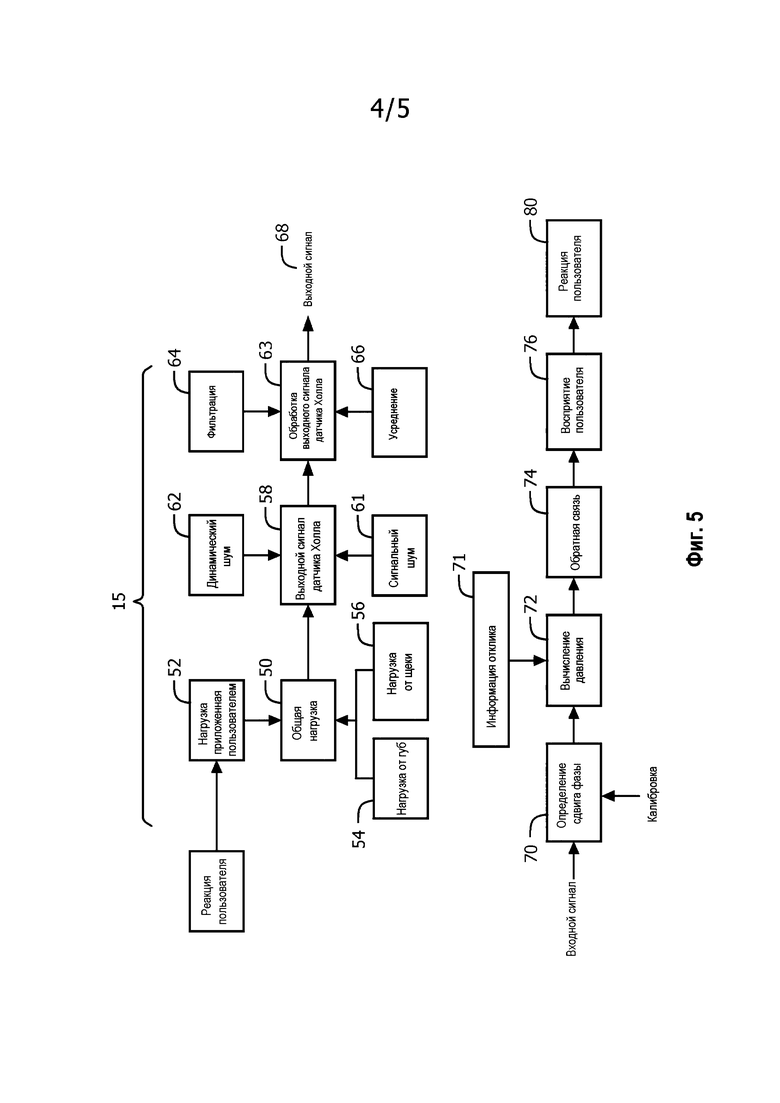
Фиг. 5 - схема процессора и его функций для определения давления, приложенного к щетиночной области при использовании зубной щетки.
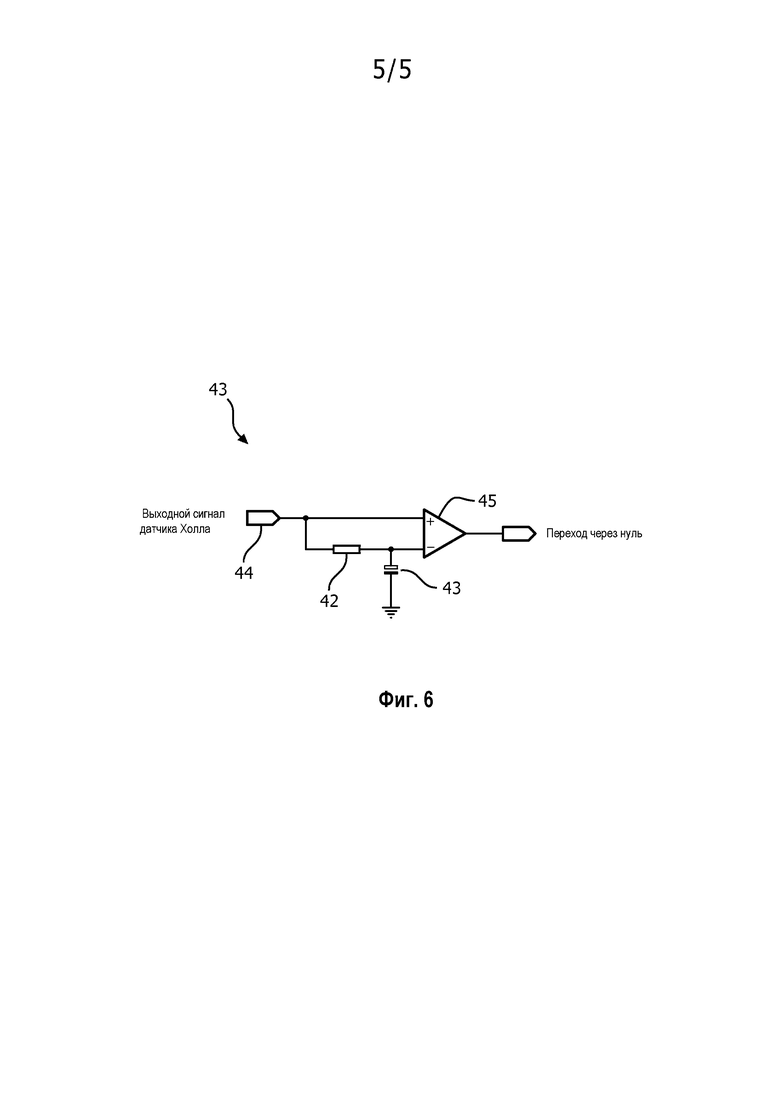
Фиг. 6 - схема перехода через ноль, использованная в одном варианте осуществления изобретения.
Наилучший способ выполнения изобретения
Фиг. 1 - покомпонентное изображение приводимой в действие посредством резонанса электрической зубной щетки, включающей в себя чувствительный к давлению механизм, описанный и представленный ниже. Электрическая зубная щетка, представленная в целом ссылочной позицией 10, включает в себя блок 12 приводного механизма, приводимый в действие посредством резонанса системой 14 электропитания, которая включает в себя аккумулятор и носитель электронной схемы (печатная плата). И приводной механизм, и блок питания представляют собой традиционные элементы электрической зубной щетки и поэтому не описаны подробно в настоящем документе. Представленная электрическая зубная щетка также включает в себя резиновый амортизатор 17, действующий как упругая подкладка для приводного механизма в корпусе 18. Электрическая зубная щетка дополнительно включает в себя печатную плату с микропроцессорной управляющей схемой 15 для создания возбуждающего сигнала для системы электропитания. От приводного механизма к приводному стержню 23 прикреплен с возможностью снятия блок 20 чистящей головки, на дистальном конце которого расположен чистящий элемент 21, имеющий щетиночную область 22. На заднем конце приводного блока расположен магнит 30. В представленном варианте осуществления магнит имеет следующие размеры: 13,4×9,0×4,0 (мм). Одним примером подходящего магнита является неодим. В электрической зубной щетке вблизи магнита расположен датчик 32 Холла. Примером подходящего датчика Холла является Allegro A1395, производимый компанией Allegro Microsystems. Датчик 32 Холла может быть установлен в зубной щетке в различных положениях, но в одном варианте осуществления датчик Холла установлен на гибкой схеме 34, которая прикреплена к печатной плате 15 так, что датчик Холла может реагировать на изменение магнитного поля, когда зубная щетка движется при работе.
В состояниях без нагрузки датчиком Холла выдает синусоидальный выходной сигнал, как представлено на фиг. 2. В настоящем изобретении датчик Холла определяет изменения фазы между возбуждающим сигналом для устройства и механическим откликом приводного механизма/блока чистящей головки, сопровождаемого перемещением магнита 30 при изменении давления на щетиночную область. Когда давление растет, сдвиг фазы увеличивается. Обычно изменение фазы имеет линейный характер на протяжении определенного изменения давления (силы), от 0 граммов до по меньшей мере 300 граммов, когда давление уже превышает обычную максимальную величину, обеспечивающую удобство и эффективность.
Информация сохраняется в процессоре 15, который, в частности, соотносит величины сдвига фазы с приложенной силой для конкретного устройства, подвергающегося проверке, так чтобы определенный сдвиг фазы точно указывал давление/силу, проложенную к щетиночной области этой зубной щетки.
Возбуждающий сигнал обычно представляет собой прямоугольный импульс, который в одном цикле возрастает от нулевого уровня до положительной величины и после времени, определяемого приводной частотой, снижается до величины противоположной полярности, и этот цикл возбуждающего сигнала повторяется в течение времени работы зубной щетки для каждого события. В представленном варианте осуществления возбуждающая частота составляет 250 Гц, а амплитуда движения находится в диапазоне 9-11°. Однако это только один пример работы. Частота и амплитуда могут быть различными.
Первоначально зубная щетка калибруется для определения временного смещения «t», которое существует между прямоугольным импульсом возбуждающего сигнала двигателя и сигналом механического отклика, как указано выходным сигналом от датчика Холла. Это происходит при состояниях без нагрузки, так что статическое соотношение фаз между возбуждающим сигналом двигателя и сигналом отклика известен и может, по сути, представлять собой установочный нуль, установленный для обработки сигнала во время реальной работы зубной щетки.
На фиг. 3 представлен один полуцикл сигнала отклика (выходного сигнала датчика Холла), в котором левый фронт синхронизирован с нарастающим фронтом возбуждающего сигнала двигателя. Когда давление/нагрузка прилагается к щетиночной области, происходит сдвиг фазы в выходном сигнале датчика Холла относительно возбуждающего сигнала двигателя. Один пример сдвига фазы проиллюстрирован на фиг. 4.
Величина сдвига фазы определяется непрерывно, когда нагрузка приложена к щетиночной области. Существует множество способов определить сдвиг фазы. Один способ осуществляется посредством определения перехода через нуль. При сдвиге фазы переход через нуль сигнала отклика от датчика Холла смещается прямо пропорционально. Нулевое пороговое значение определяется посредством усреднения сигнала по нескольким циклам. Затем измеряется время от начала цикла возбуждения двигателя до первого перехода сигнала датчика через это нулевое пороговое значение. Переход через нуль является указанием сдвига фазы. Пример подходящей схемы перехода через нуль представлен на фиг. 6. Резистор 42 и конденсатор 43 образуют схему фильтра низких частот для фильтрования сигнала 44 переменного тока от датчика Холла. Полученное в результате среднее значение напряжения является одним входным сигналом компаратора 45. Другим входным сигналом компаратора является непосредственно выходной сигнал датчика Холла. Выходной сигнал компаратора 45 переключается, когда сигнал переменного тока датчика Холла проходит через свою среднюю величину.
Другой возможностью получения информации о сдвиге фазы является получение посредством процесса квадратурной выборки, при котором используется четыре отсчета за цикл для выделения смещения, постоянной составляющей и фазы синусоидальной волны. Четыре отсчета отстоят друг от друга на 90°, в приведенных ниже вычислениях они обозначены S1, S2 и S4. Средняя величина напряжения, или смещение постоянной составляющей, может быть вычислено:
Сигналы обычно включают в себя шум, так что множество отсчетов обычно усредняются для сглаживания результатов. Для вычисления фазы два отсчета, синфазный и сдвиг по фазе на 90°, определяется следующим образом:


при этом фазовый угол определяется как:

Усреднение I и Q по множеству отсчетов является эффективным для снижения шума.
Вышеупомянутое является только двумя примерами определения сдвига фазы. Могут использоваться другие способы.
Вся последовательность обработки представлена на фиг. 5. Общая нагрузка давления на щетиночную область, обозначенная ссылочной позицией 50, содержит в целом давление, приложенное непосредственно пользователем 52, а также нагрузку, которая существует от губ 54 и щеки 56 пользователя при реальной чистке.
Общая нагрузка создает сдвиг фазы между возбуждающим сигналом двигателя и выходным сигналом датчика Холла, характеризующий отклик системы. Выходной сигнал 60 датчика Холла представлен ссылочной позицией 58. Выходной сигнал датчика подвержен влиянию сигнального шума 61, который может иметь место от различных источников, включающих в себя сам датчик Холла, а также изменения в установке датчика или изменение в резонансной системе со временем. Выходной сигнал датчика Холла также чувствителен к динамическому шуму 62, который обычно создается за счет вибрации от приводного механизма.
Затем выходной сигнал датчика Холла обрабатывается, обозначено ссылочной позицией 63, что может включать в себя фильтрацию 64 и усреднение 66 для создания максимально чистого выходного сигнала. Это представлено, например, сигналом на фиг. 4. Этот сигнал, представленный в виде выходного сигнала 68 на фиг. 5, затем подвергается дальнейшей обработке. Реальный сдвиг фазы определяется в ссылочной позиции 70. Как указано выше, этот сдвиг фазы может определяться посредством стандартной схемы перехода через нуль. Сдвиг фазы определяется для калиброванного устройства. Затем процессор использует сдвиг фазы для вычисления фактического давления посредством использования кривой отклика или хранимой информации 71, которая соотносит сдвиг фазы по одной оси с давлением по другой оси, что представлено ссылочной позицией 72. Обычно, как указано выше, кривая отклика представляет собой прямую линию для зависимости сдвига фазы от давления в пределах, по меньшей мере, диапазона давления (силы) 0-300 граммов.
Результат, который обеспечивается непрерывно, используется для создания сигнала обратной связи, который может быть звуковым, визуальным или осязательным, представлено ссылочной позицией 74. Обратная связь может указывать одно или более из следующего: (1) давление превысило максимальное пороговое значение давления; (2) давление не достигло минимального давления; и (3) давление находится между минимальным и максимальным пороговыми значениями, что является приемлемым. Обратная связь воспринимается пользователем, как представлено блоком 76, что направлено на то, чтобы вызвать реакцию пользователя, что представлено блоком 80. Реакция пользователя обычно приводит к изменению нагрузки пользователя, с возникающим в результате изменением в величине определяемого давления. Информация предоставляется пользователю на непрерывной основе, так что пользователь может поддерживать нагрузку на щетиночную область между максимальным и минимальным пороговыми значениями для эффективной и безопасной работы.
Соответственно, раскрыта электрическая зубная щетка, включающая в себя чувствительную к давлению систему, использующую датчик Холла и определение сдвига фазы под действием давления, при этом информация, хранимая в устройстве, соотносит величины сдвига фазы с давлением. Раскрытая система является относительно простой и недорогой, а также надежной.
Хотя предпочтительный вариант осуществления изобретения был раскрыт с целью иллюстрации, следует понимать, что в вариант осуществления могут быть внесены различные изменения, модификации и замены без отступления от смысла изобретения, ограниченного нижеприведенной формулой.
Предложена зубная щетка, включающая ручку с питаемой энергией приводной системой (14). Щетка также включает блок (20) чистящей головки с плечом чистящей головки, имеющей чистящий элемент (21) на своем дистальном конце. Блок (12) приводного механизма чувствителен к возбуждающему сигналу от блока питания для преобразования действия блока питания в перемещение блока чистящей головки. Магнит (30) фиксирован к задней части приводного механизма, при этом датчик (32) Холла установлен в магнитном поле, созданном магнитом при движении при работе. Давление на чистящий элемент создает сдвиг фазы выходного сигнала датчика Холла. Процессор (15) определяет величину сдвига фазы сигнала датчика Холла, когда давление прилагается к чистящему элементу, и создает сигнал, указывающий приложенное давление, посредством использования хранимой информации (71), соотносит сдвиг фазы с давлением для отдельного устройства. 8 з.п. ф-лы, 6 ил.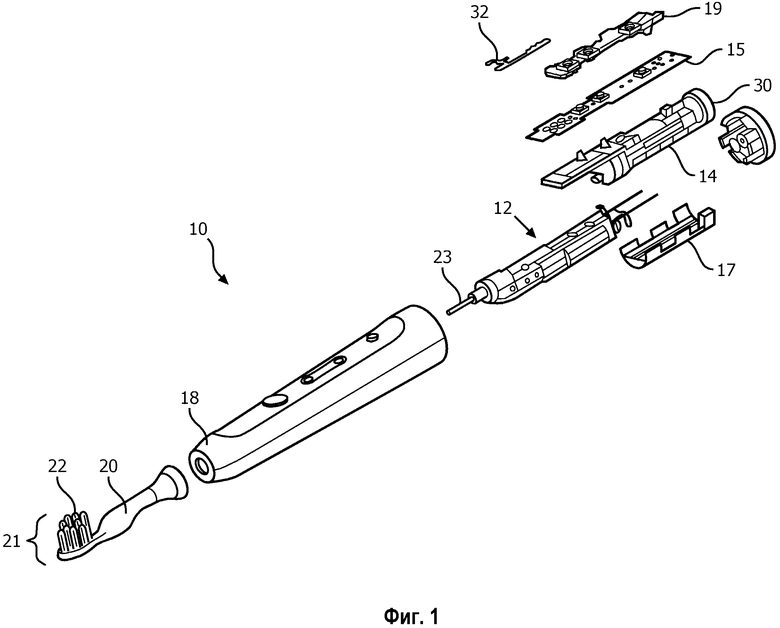
1. Электрическая зубная щетка, содержащая:
ручку, содержащую систему (14) электропитания;
блок (20) чистящей головки, включающий в себя чистящий элемент (21), имеющий щетиночную область на своем дистальном конце;
блок (12) приводного механизма, чувствительный к управляющему сигналу на привод от системы электропитания для создания движения блока чистящей головки;
магнит (30), расположенный так, что он перемещается согласно движению блока чистящей головки, при этом магнит создает магнитное поле;
датчик (32) Холла, установленный в магнитном поле, причем датчик Холла определяет изменение фазы между управляющим сигналом на привод от системы электропитания и движением блока чистящей головки при изменении давления на щетиночную область и реагирует фазовым сдвигом выходного сигнала датчика Холла относительно фазы управляющего сигнала на привод; и
микропроцессорное устройство (15) управления для определения сдвига фазы выходного сигнала датчика Холла в результате давления на щетиночную область при чистке и для создания сигнала обратной связи, характеризующего указанное давление, в соответствии с информацией, хранимой в электрической зубной щетке (10) и соотносящей значения сдвига фазы с давлением.
2. Электрическая зубная щетка по п. 1, в которой микропроцессорное устройство управления калибровано так, что при условии отсутствия нагрузки выходной сигнал датчика Холла совпадает по фазе с управляющим сигналом на привод.
3. Электрическая зубная щетка по п. 1, включающая в себя схему (43) перехода через нуль для определения сдвига фазы.
4. Электрическая зубная щетка по п. 1, в которой микропроцессорное устройство управления выполнено с возможностью усреднения выходного сигнала датчика Холла по нескольким циклам (6) для фильтрации шума от выходного сигнала (64) датчика Холла.
5. Электрическая зубная щетка по п. 1, в которой микропроцессорное устройство управления выполнено с возможностью использования хранимой информации для корреляции выходного сигнала датчика Холла с первым установленным пороговым значением и обеспечения пользователя информацией (74) обратной связи, когда давление на чистящий элемент превышает первое пороговое значение.
6. Электрическая зубная щетка по п. 5, в которой первое пороговое значение представляет величину максимального давления.
7. Электрическая зубная щетка по п. 5, включающая в себя второе установленное пороговое значение, представляющее величину минимального давления.
8. Электрическая зубная щетка по п. 1, в которой выходной сигнал от датчика Холла является непрерывным и сигнал обратной связи от микропроцессора также является непрерывным, представляя постоянную индикацию давления на чистящий элемент.
9. Электрическая зубная щетка по п. 1, в которой информация обратной связи имеет вид, распознаваемый пользователем (76).
| EP 1228737 A2, 07.08.2002 | |||
| JPH 07116027 A, 09.05.1995 | |||
| US 5784742 A, 28.07.1998 | |||
| US 2013205528 A1, 15.08.2013. |

