ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к электрическим зубным щеткам, имеющим датчики давления щетинок, и более конкретно относится к такой зубной щетке, имеющей повышенную точность восприятия давления.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Хорошо известно использование датчика давления в электрических зубных щетках. Такие датчики, также называемые датчиками нагрузки, фактически измеряют силу, в граммах, которую прилагает щетиночная область к зубам. Однако результаты измерений, получаемые от таких датчиков, обычно включают в себя другие типы нагрузок, например нагрузки, создаваемые щеками, языком и губами, в дополнение к прямой силе, прилагаемой щетинками к зубам, создаваемой действием пользователя. Точное указание давления щетинок на зубы, отделенное от других нагрузок, обеспечивает лучшую информированность пользователя, а также обеспечивает лучшую эффективность устройства.
Соответственно существует необходимость в обеспечении чувствительной к давлению/силе системы, обеспечивающей пользователю более точную информацию, касающуюся приложения чрезмерной силы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Соответственно электрическая зубная щетка, имеющая датчик давления, содержит: систему определения давления, приложенного к зубам пользователя щетинками зубной щетки, посредством измерения нормальной силы; систему определения давления, приложенного к зубам пользователя щетинками зубной щетки, посредством измерения динамической силы, и систему обработки данных, которая в ответ на давление, определенное посредством измерения нормальной силы и измерения динамической силы, регулирует заданную величину давления, указывающую на приложение чрезмерный силы со стороны щетинок.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 – вид сверху различных участков рта пользователя и зубной щетки при чистке наружных (щечных) поверхностей зубов.
Фиг. 2 – вид спереди Фиг. 1.
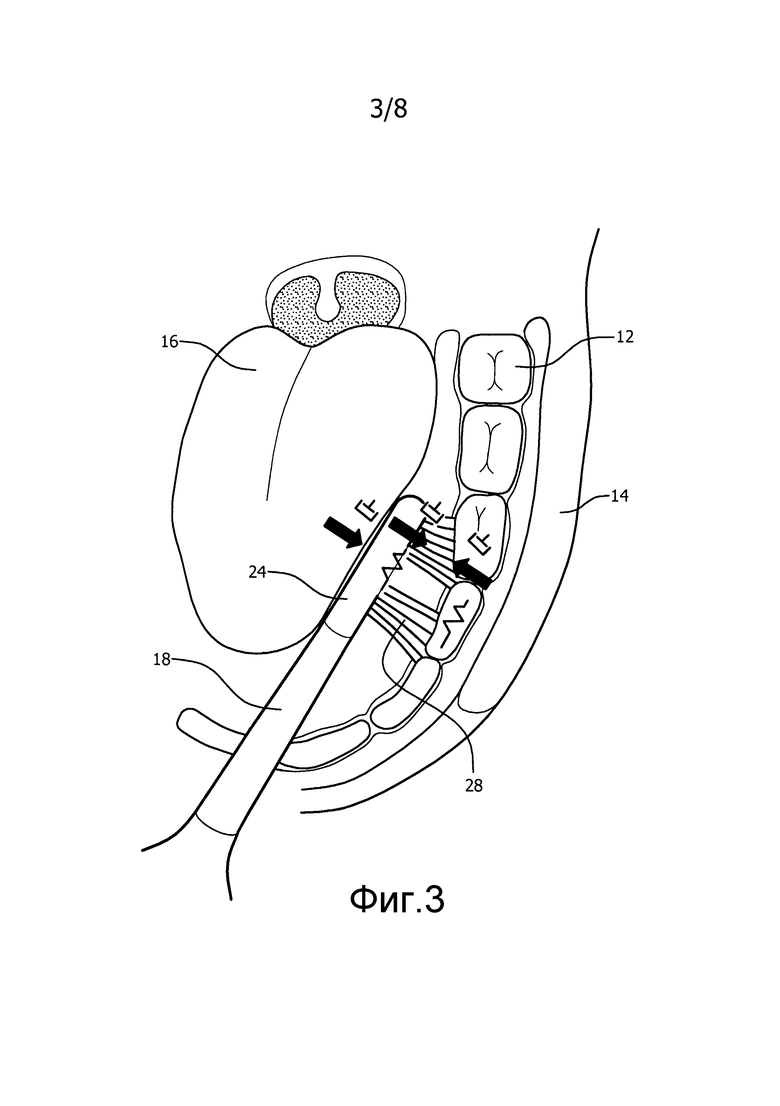
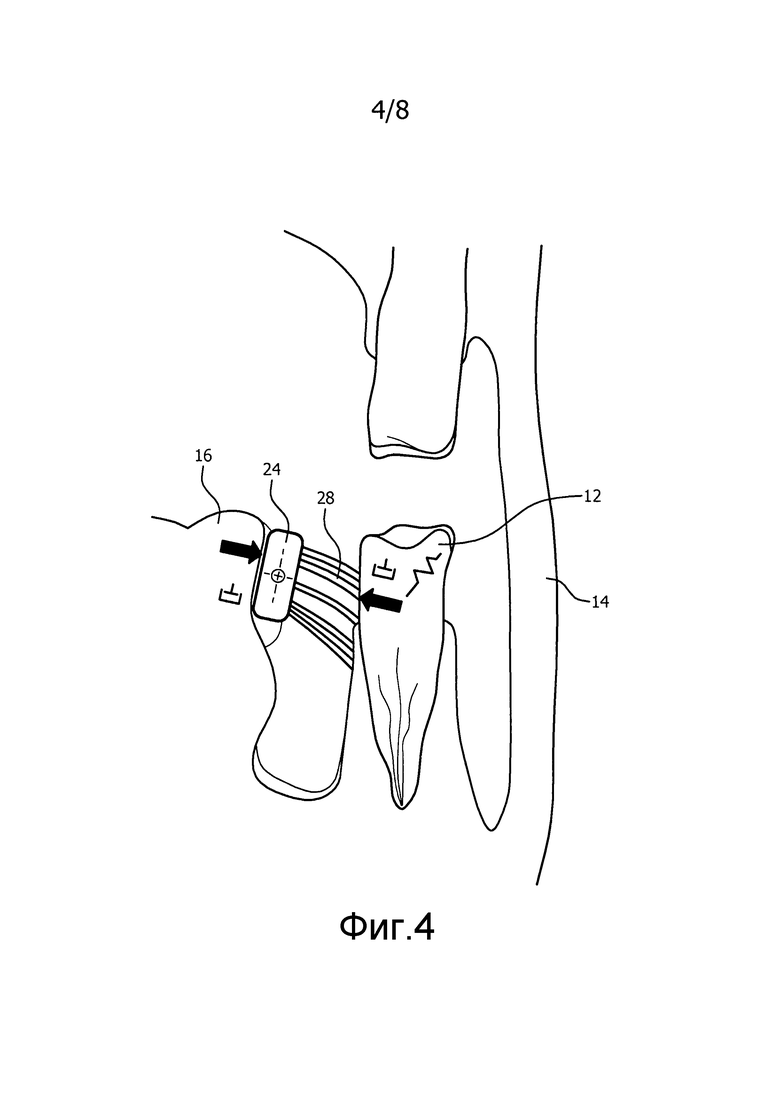
Фиг. 3 – вид сверху рта пользователя и зубной щетки при чистке внутренних (язычных) поверхностей зубов.
Фиг. 4 – вид сверху рта, изображенного на Фиг. 3.
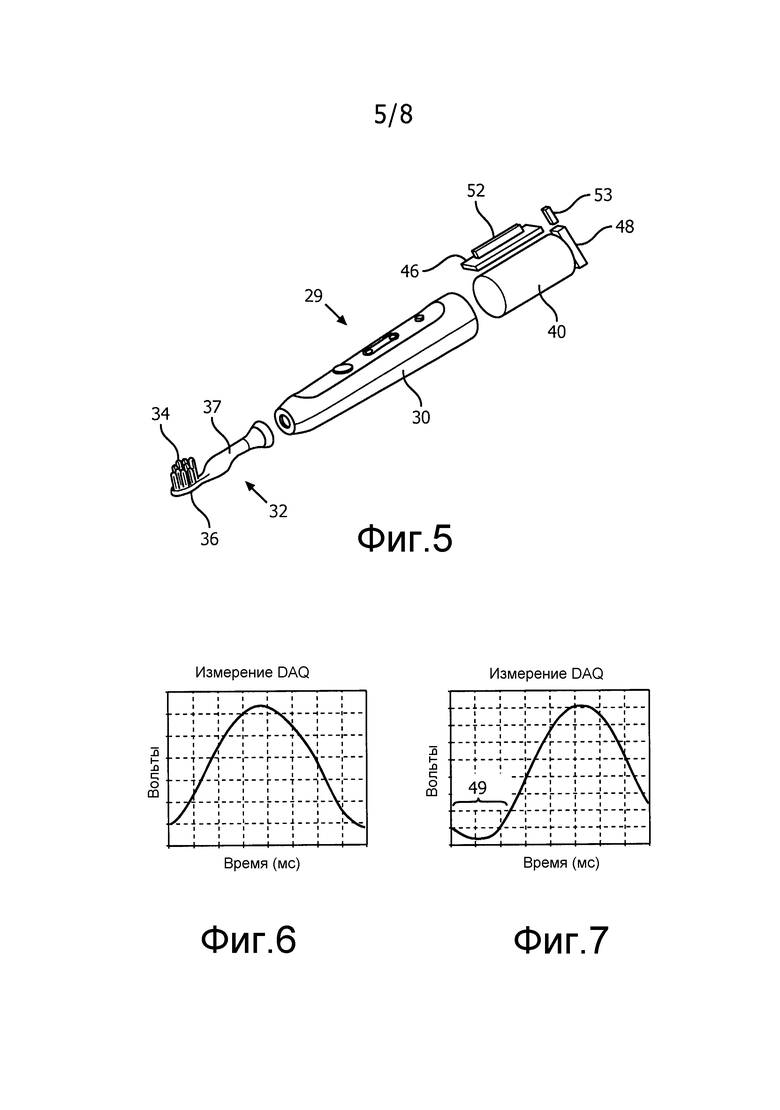
Фиг. 5 - упрощенная схема участка зубной щетки, выдающего информацию о давлении.
Фиг. 6 – выходной сигнал полуцикла датчика Холла, при этом выходной сигнал калиброван относительно сигнала возбуждения для устройства.
Фиг. 7 – график, аналогичный графику, изображенному на Фиг. 6, на котором представлен сдвиг фазы выходного сигнала из-за нагрузки.
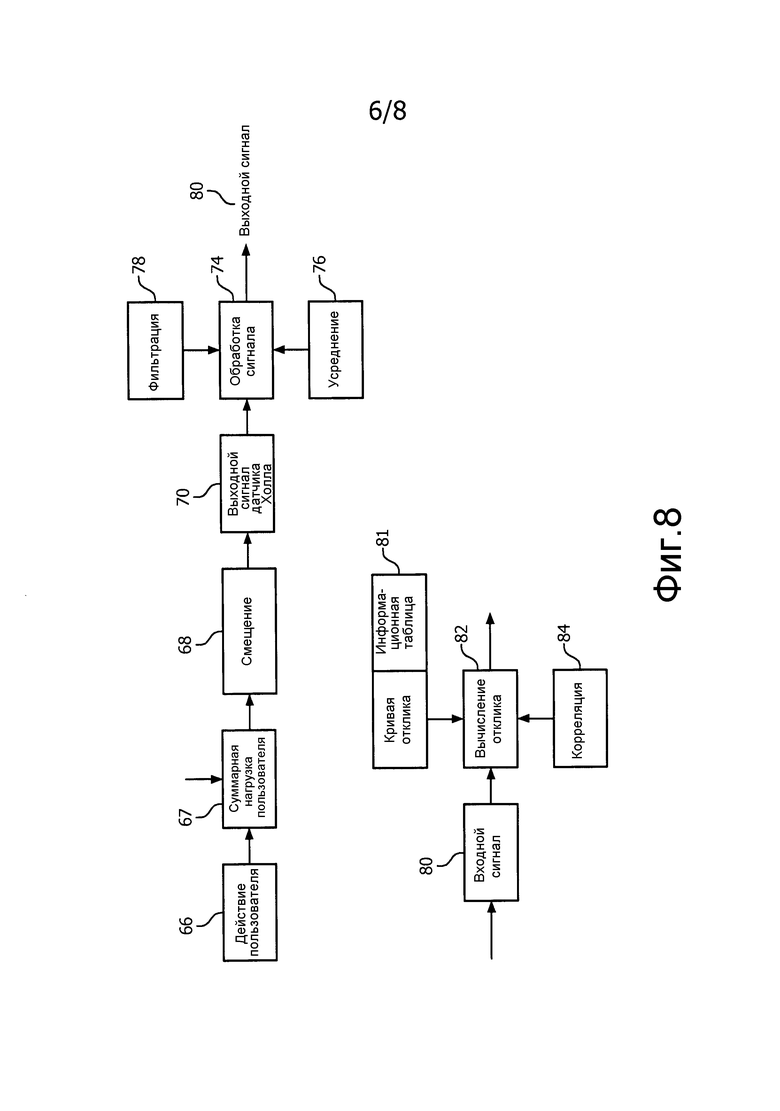
Фиг. 8 – схема обработки, выдающая информацию о нормальной силе от датчика, изображенного на Фиг. 5.
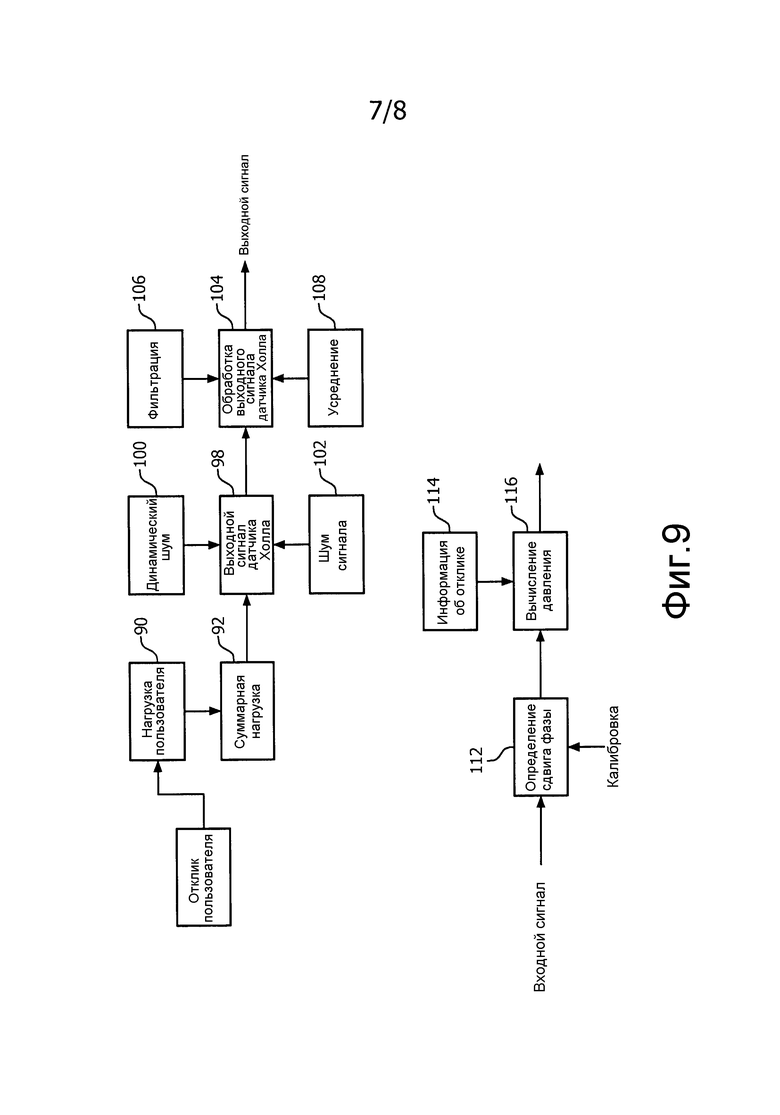
Фиг. 9 – схема обработки для определения информации о динамической силе от датчика, изображенного на Фиг. 5.
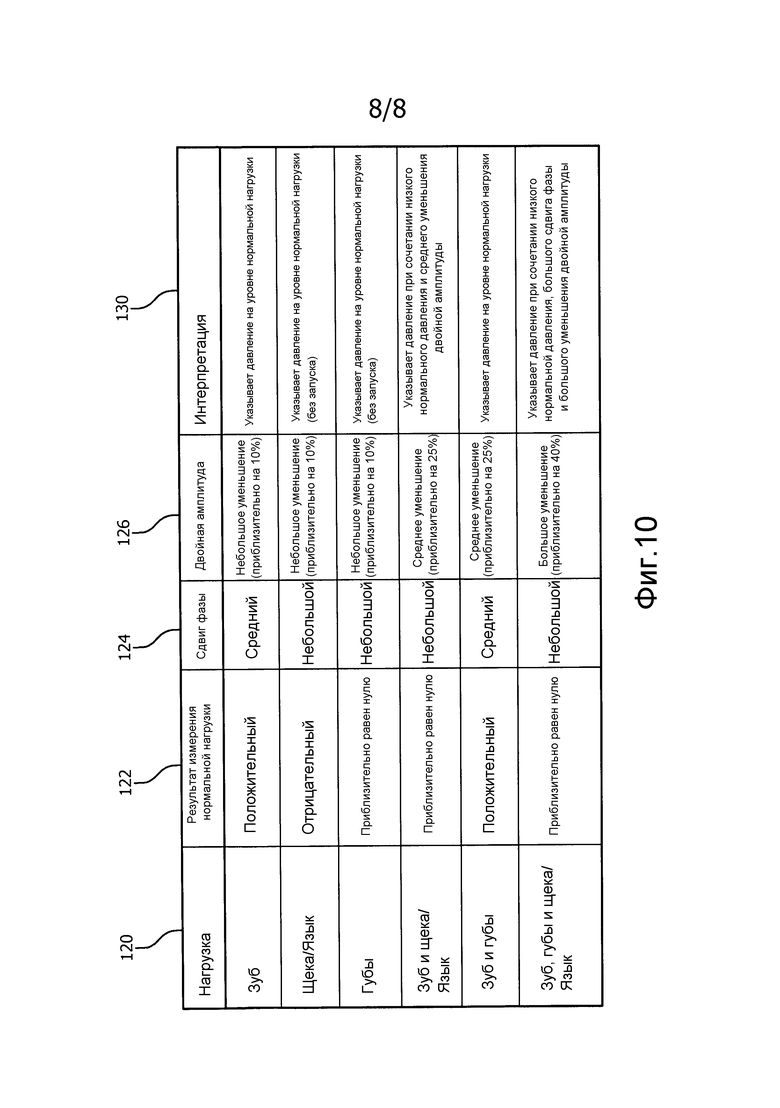
Фиг. 10 - таблица, на которой показано применение информации на Фиг. 6 и 7 для регулирования точки срабатывания/пороговых значений чрезмерной силы, приложенной пользователем.
НАИЛУЧШИЙ СПОСОБ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Ткани полости рта при чистке создают несколько типов нагрузок помимо давления на зубы со стороны щетинок зубной щетки. Имеется нагрузка от подпружинивания, создаваемого при воздействии щетинок на зубы. Имеется также демпфирующее действие, в виде трения, которое существует между щеками и щетиночной пластиной, служащей опорой для щетинок зубной щетки, между щетинками и зубами, между языком и щетиночной пластиной и между губами и переходным участком зубной щетки. Кроме того, существует нагрузка, создаваемая воздействием щек на щетиночную пластину, а также зубов на щетинки, губ на щетиночную пластину, языка на щетиночную пластину, щетинок на зубы и зубов на щетинки.
Эти различные нагрузки проиллюстрированы на Фиг. 1 и 2 для наружных (щечных) поверхностей зубов, а на Фиг. 3 и 4 представлена нагрузка для внутренних (язычных) поверхностей. Зубы проиллюстрированы ссылочной позицией 12, щеки показаны ссылочной позицией 14, язык - ссылочной позицией 16, а губы – ссылочной позицией 18. Зубная щетка представлена в целом ссылочной позицией 20, при этом переходный участок зубной щетки представлен ссылочной позицией 22, участок щетиночной пластины – ссылочной позицией 24, а щетинки – ссылочной позицией 28. Системы датчика давления при попытке измерить силу/нагрузку, создаваемую щетинками на зубы, для предоставления пользователю информации, касающейся приложения чрезмерной силы относительно возможного давления на них, а также минимальной силы для обеспечения эффективности очистки, на самом деле измеряют своими датчиками не только давление щетинок на зубы и, таким образом, предоставляют пользователю несколько неточную информацию относительно чрезмерного давления. В частности, из-за включения некоторых нагрузок, создаваемых тканями полости рта, в дополнение к непосредственному давлению щетинок на зубы точка запуска (пороговое значение) для предоставления пользователю указания на чрезмерное давление может оказаться слишком высокой или слишком низкой. При слишком высоком значении может быть причинен вред без предварительного предупреждения, а при слишком низком значении может снижаться эффективность.
Настоящее изобретение предназначено для предоставления пользователю более точной и достоверной информации о точке срабатывания, в частности более точной/определенной информации, касающейся давления или силы, прилагаемой щетинками к поверхности зубов. В настоящем изобретении используются две различные системы определения силы, и информация, полученная от каждой системы, влияет с помощью таблицы на информацию, представляемую пользователю, относительно перегрузки или чрезмерного давления. Например, если точка срабатывания установлена в процессоре на 300 граммов, информация, предоставляемая двумя различными системами датчика давления, а также информация, касающаяся значений двойной амплитуды, используется для регулирования предустановленного значения, при котором пользователю выдается предупреждение. Одна чувствительная к давлению система предоставляет информацию о нормальной силе или смещении, а другая чувствительная система предоставляет информацию о динамической силе.
Существует несколько чувствительных конструкций, предоставляющих информацию о нормальной силе или смещении, и конструкций, предоставляющих информацию о динамической силе, а также информацию о двойной амплитуде.
В представленной конструкции информация о нормальной силе или смещении обеспечивается конструкцией с датчиком Холла, а информация о динамической нагрузке обеспечивается также датчиком Холла, используемым для измерения сдвига фазы между откликом магнитного поля относительно фазы сигнала возбуждения. Однако для обеспечения информации о смещении и динамической нагрузке могут использоваться другие конструкции.
На Фиг. 1 представлено упрощенное изображение электрической зубной щетки, выполненной с возможностью включения в нее чувствительной конструкции на основе эффекта Холла для получения как информации о смещении, так и информации о динамической нагрузке. Электрическая зубная щетка, представленная в целом ссылочной позицией 29, включает в себя ручку 30, блок 32 чистящей головки и набор щетинок 34, при этом пластина 36 со щетинками расположена на дистальном конце переходного участка 37 блока чистящей головки. Блок чистящей головки обычно выполнен с возможностью снятия с ручки. Электрическая зубная щетка включает в себя блок приводного механизма, представленный очень схематично ссылочной позицией 40, снабженный аккумулятором. Электрическая зубная щетка дополнительно включает в себя микропроцессор 46, создающий сигнал возбуждения для приводного механизма и также обрабатывающий сигнальную информацию от датчика/датчиков Холла для предоставления информации о смещении и информации о динамической нагрузке. В задней части приводного механизма 40 имеется магнит 48. В приведенном варианте осуществления магнит имеет следующие размеры: 13,4 мм на 9,0 мм на 4,0 мм. Одним примером подходящего магнита является неодим. Могут использоваться другие магниты. В электрической зубной щетке установлен датчик или датчики 52 Холла. Датчики 52 Холла могут быть установлены в различных положениях в электрической зубной щетке. В одном варианте осуществления один датчик Холла устанавливается на гибкой плате, которая прикрепляется к печатной плате, содержащей микропроцессор, так что датчик Холла может реагировать на изменение магнитного поля, когда зубная щетка перемещается во время работы. Это позволяет определить динамическую силу, как объяснено ниже.
Другой датчик 53 Холла может быть установлен на каркасе приводного механизма зубной щетки, расположенном на расстоянии приблизительно 2,3 мм от магнита, приблизительно в той же плоскости. Этот датчик Холла определяет боковое смещение приводного механизма из-за силы, действующей со стороны щетиночной области на зубы, при этом он установлен или расположен, например, так, как в варианте с V-образной пружиной, так что задний конец приводного механизма перемещается в боковом направлении в ответ на силу, приложенную пользователем.
При работе выходное напряжение датчика 53 Холла изменяется синусоидально в зависимости от информации о нормальной силе (смещении), когда задний конец приводного механизма и магнит раскачиваются назад и вперед на выбранный угол. Выходное напряжение датчика Холла будет изменяться соответственно изменению магнитного поля. Изменение магнитного поля обеспечивает основу для определения величины силы, приложенной к щетинкам, в зависимости от смещения. Когда сила приложена к щетиночной области, задний конец приводного механизма поворачивается вместе с магнитом, создавая боковое смещение магнита в направлении датчика Холла. Датчик Холла достаточно чувствителен, чтобы обнаруживать изменение магнитного поля, когда магнит приближается к датчику. Микропроцессор зубной щетки включает в себя информационную таблицу в виде кривой отклика, которая связывает выходное напряжение датчика Холла со смещением магнита и, таким образом, с силой, приложенной к чистящему элементу. Смещение магнита приводит к изменению выходного напряжения датчика Холла в зависимости от выходного напряжения в ненагруженных состояниях. Соответственно изменение выходного сигнала датчика является надежным показателем смещения силы, прилагаемой в щетиночной области. В настоящем документе приводится ссылка на предварительную патентную заявку США №61/695396, которая относится к информационной системе о давлении нормальной силы (смещения) для зубной щетки.
Что касается формирования информации о динамической нагрузке, датчиком Холла также создается синусоидальный выходной сигнал в ненагруженных состояниях. В этой конструкции датчик Холла обнаруживает изменение фазы между сигналом возбуждения устройства и механическим откликом блока чистящей головки, создаваемым магнитом 48 при изменении давления на щетиночную область. При росте давления сдвиг фазы увеличивается. Обычно изменение фазы является линейным в пределах заданного диапазона давлений, например от 0 граммов до по меньшей мере 300 граммов, при котором точечное давление обычно превышает максимальное значение, обеспечивающее комфорт и эффективность. Информация также хранится в микропроцессоре, который, в частности, связывает информацию и значения, относящиеся к сдвигу фазы, с приложенной силой для конкретного тестируемого устройства, так что определенный сдвиг фазы точно указывает давление/силу, приложенную к щетиночной области зубной щетки, в частности динамическую силу.
Сигнал возбуждения обычно является прямоугольным, при этом в одном цикле он увеличивается от нулевого уровня до положительного значения, и через некоторое время, определенное частотой возбуждения, снижается до значения, имеющего противоположную полярность, причем цикл сигнала возбуждения повторяется в течение работы зубной щетки для каждого случая.
В приведенном варианте осуществления приводная частота составляет 250 Гц, а амплитуда движения составляет 9-11°. Это, однако, только один пример работы. Частота и амплитуда могут быть другими.
Зубная щетка первоначально калибрована для определения времени смещения между прямоугольным сигналом возбуждения двигателя и механическим сигналом отклика, указываемым выходным сигналом датчика Холла. Это выполняется в ненагруженных состояниях, так что статическое отношение фаз между сигналом возбуждения двигателя и сигналом отклика известно и может по существу быть установлено равным нулю для обработки сигнала при фактической работе зубной щетки.
На Фиг. 6 представлен одиночный полуцикл сигнала отклика (выходного сигнала датчика Холла), при этом левый фронт сигнала синхронизирован с нарастающим фронтом сигнала возбуждения двигателя. При приложении давления/нагрузки к щетиночной области возникает сдвиг фазы выходного сигнала датчика Холла относительно сигнала возбуждения двигателя. Один пример сдвига (49) фазы проиллюстрирован на Фиг. 7.
Значение сдвига фазы определяется непрерывно при приложении нагрузки к щетиночной области. Существует множество способов определения сдвига фазы. Один из них состоит в определении перехода через нуль. Переход через нуль сигнала отклика от датчика Холла смещается прямо пропорционально сдвигу фазы. Нулевое пороговое значение определяется посредством усреднения сигнала по множеству циклов. Затем измеряется время от начала цикла возбуждения двигателя до первого перехода сигнала датчика через это нулевое пороговое значение. Переход через нуль обеспечивает указание сдвига фазы.
Другая возможность для получения информации о сдвиге фазы состоит в процессе квадратурной дискретизации, при котором используются четыре отсчета на цикл для извлечения смещения постоянной составляющей и фазы синусоидального колебания. Четыре отсчета берутся с интервалом 90°, в нижеприведенных формулах они обозначены S1, S2 и S4. Усредненное напряжение, или смещение постоянной составляющей, может быть вычислено по следующей формуле:
Сигналы обычно включают в себя шум, так что множество отсчетов обычно усредняются до сглаживания результатов. Для вычисления фазы два отсчета, синфазный и сдвинутый по фазе на 90°, определяются следующим образом:


при этом угол сдвига фаз определяется как:
Усреднение I и Q по множеству отсчетов эффективно снижает шум.
Вышеприведенное является только двумя примерами определения сдвига фазы. Также могут использоваться другие способы.
Приводится ссылка на предварительную патентную заявку США №61/698078, направленную на конструкцию, чувствительную к динамической нагрузке (сдвигу фазы).
На Фиг. 8 представлен процесс обработки информации о сигнале нормальной силы (смещения). Действие пользователя представлено блоком 66, указывающим величину силы, фактически приложенной пользователем. Действие суммарной нагрузки представлено блоком 67, включающим в себя нагрузки, отличные от щетиночного давления на зубы. Смещение, создаваемое на заднем конце приводного механизма и магнита, представлено блоком 68. Смещение создает сигнал от датчика Холла, как представлено блоком 70. Выходной сигнал датчика Холла затем обрабатывается в блоке 74, определяющем изменение напряжения и выходном сигнале из-за суммарной нагрузки. Обработка включает в себя усреднение выходного сигнала по множеству циклов, что показано блоком 76, а также фильтрацию шума от сигнала, включающего в себя электронный шум и механический шум от двигателя, что представлено блоком 78. Результат представляет собой выходной сигнал 80, являющийся входным сигналом для остальной части схемы обработки. Как указано выше, микропроцессор включает в себя кривую отклика или информационную таблицу 81, которая связывает выходной сигнал датчика Холла с определенным значением смещающей силы. Кривая отклика обычно представляет собой прямую линию для среднего значения, составляющего 0-300 грамм-сил. Это вычисление включает в себя этап корреляции, представленный блоком 84, который включает в себя корреляцию значений силы и значений сигнала датчика Холла в пределах диапазона силы. Информация предоставляет непрерывно.
Система определения динамической нагрузки (сдвиг фазы) на основе датчика Холла (Фиг. 9) также включает в себя в целом давление, прилагаемое пользователем 90, а также суммарную нагрузку 92, возникающую при чистке. Суммарная динамическая нагрузка создает сдвиг фазы между сигналом возбуждения двигателя и выходным сигналом датчика Холла, которое представляет отклик системы. Выходной сигнал датчика Холла представлен блоком 98. На выходной сигнал датчика влияет шумовой сигнал 100, который может возникать от различных источников, включающих в себя сам датчик Холла, а также отклонения в установке или изменения, происходящие в резонансной системе с течением времени. Выходной сигнал датчика Холла также чувствителен к динамическому шуму 100, который обычно создается вибрацией от приводного механизма. Затем выходной сигнал датчика Холла обрабатывается в блоке 104, что может включать в себя фильтрацию 106 и усреднение 108 для создания чистого выходного сигнала. Этот сигнал, представленный в виде выходного сигнала 104, подвергается дальнейшей обработке. Фактический сдвиг фазы определяется в блоке 112. Как указано выше, сдвиг фазы может определяться стандартной схемой перехода через нуль или другими схемами. Сдвиг фазы определяется для калиброванного устройства. Процессор использует сдвиг фазы для вычисления динамического давления посредством использования хранящейся информации 114, которая связывает смещение фазы вдоль одной оси с давлением вдоль другой оси. Давление, полученное от схемы сдвига фазы, представлено блоком 116.
Двойная амплитуда перемещения движения щетинок также может определяться посредством той или иной системы измерения давления.
Обычно, как указано выше, кривая отклика представляет собой прямую линию для зависимости сдвига фазы от динамического давления, по меньшей мере, в пределах диапазона силы давления, составляющего 0-300 грамм. Как указано выше, результаты, полученные от устройства определения смещения (нормальной силы), отличаются от информации о давлении, полученной посредством определения динамической силы (сдвига фазы). Эти два результата затем сравниваются с таблицей, представленной на Фиг. 10, для определения результирующего эффекта, связанного с заданной точкой срабатывания, то есть 300 грамм, или с другим установленным значением. Нагрузки, создаваемые различными участками рта, представлены в столбце 120. Они включают в себя зубы, щеки/язык, губы, сочетание зубов и щек/языка, сочетание зубов и губ и сочетание зубов, губ и щек/языка. Когда результат измерения нагрузки, создаваемой нормальной силой или смещением, является положительным (столбец 122), результат измерения сдвига фазы представляет собой среднее значение (столбец 124), а значение двойной амплитуды (колонка 126) немного снижено, место положения точки срабатывания не меняется, что представлено в столбце 130. Когда результат измерения нагрузки от нормальной силы является отрицательным, сдвиг фазы является небольшим, а двойная амплитуда снижена незначительно, срабатывания не происходит.
Когда результат измерения нагрузки от нормальной силы или смещения приблизительно равен нулю, сдвиг фазы является небольшим, а двойная амплитуда снижена незначительно, срабатывания не происходит. Когда результат измерения нормальной силы приблизительно равен нулю, сдвиг фазы является небольшим, а двойная амплитуда указывает среднее снижение, точка срабатывания снижается. Когда результат измерения нормальной силы является положительным, сдвиг фазы является средним, а двойная амплитуда указывает среднее снижение, давление в точке срабатывания остается неизменным.
Когда значение смещающей нагрузки приблизительно равно нулю, смещение фазы является небольшим, а снижение двойной амплитуды является высоким, точка срабатывания уменьшается. Конкретные величины в каждом случае зависят от характеристик каждого конкретного устройства. Результатом является предоставление пользователю более точной информации относительно использования чрезмерной силы, прилагаемой щетинками к зубам и деснам.
Хотя предпочтительный вариант осуществления раскрыт с целью иллюстрации, следует понимать, что в предпочтительный вариант осуществления могут быть внесены различные изменения, модификации и замены без отступления от смысла изобретения, ограниченного нижеприведенной формулой.
Изобретение относится к области медицинской техники и предназначено для чистки зубов. Электрическая зубная щетка с датчиком давления содержит приводной механизм, магнит, системы, включающие в себя соответственно первый и второй датчики Холла и систему обработки. Приводной механизм в ответ на сигнал возбуждения создает чистящее действие посредством щетинок блока чистящей головки, соединенного с зубной щеткой. Магнит соединен с задним концом приводного механизма. Система, содержащая первый датчик Холла, предназначена для использования при определении значения прямой силы, создаваемой давлением, прикладываемым к зубам пользователя со стороны щетинок блока чистящей головки, при этом при приложении силы к щетинкам задний конец приводного механизма поворачивается вместе с магнитом, что создает боковое смещение магнита в направлении первого датчика Холла. Система, включающая в себя второй датчик Холла, предназначена для использования при определении значения динамической силы, создаваемой давлением, прикладываемым к зубам пользователя со стороны щетинок блока чистящей головки, при этом указанный второй датчик Холла определяет изменение фазы между сигналом возбуждения и механическим откликом блока чистящей головки, создаваемое перемещением магнита при изменении давления на щетинки. Система обработки в ответ на (i) результат измерения прямой силы, создаваемой давлением, и (ii) результат измерения динамической силы, создаваемой давлением, регулирует точку срабатывания так, что она либо (a) остается неизменной, либо (b) уменьшается относительно предварительно установленной точки срабатывания, равной 300 граммам или другому установленному значению, при этом точка срабатывания соответствует величине давления, характеризующей приложение чрезмерной силы со стороны щетинок к зубам пользователя относительно динамических нагрузок, создаваемых различными участками полости рта пользователя. Изобретение позволяет более точно определить силу давления щетины зубной щетки, которую прилагает пользователь к зубам за счет использования двух датчиков Холла. 12 з.п. ф-лы, 10 ил.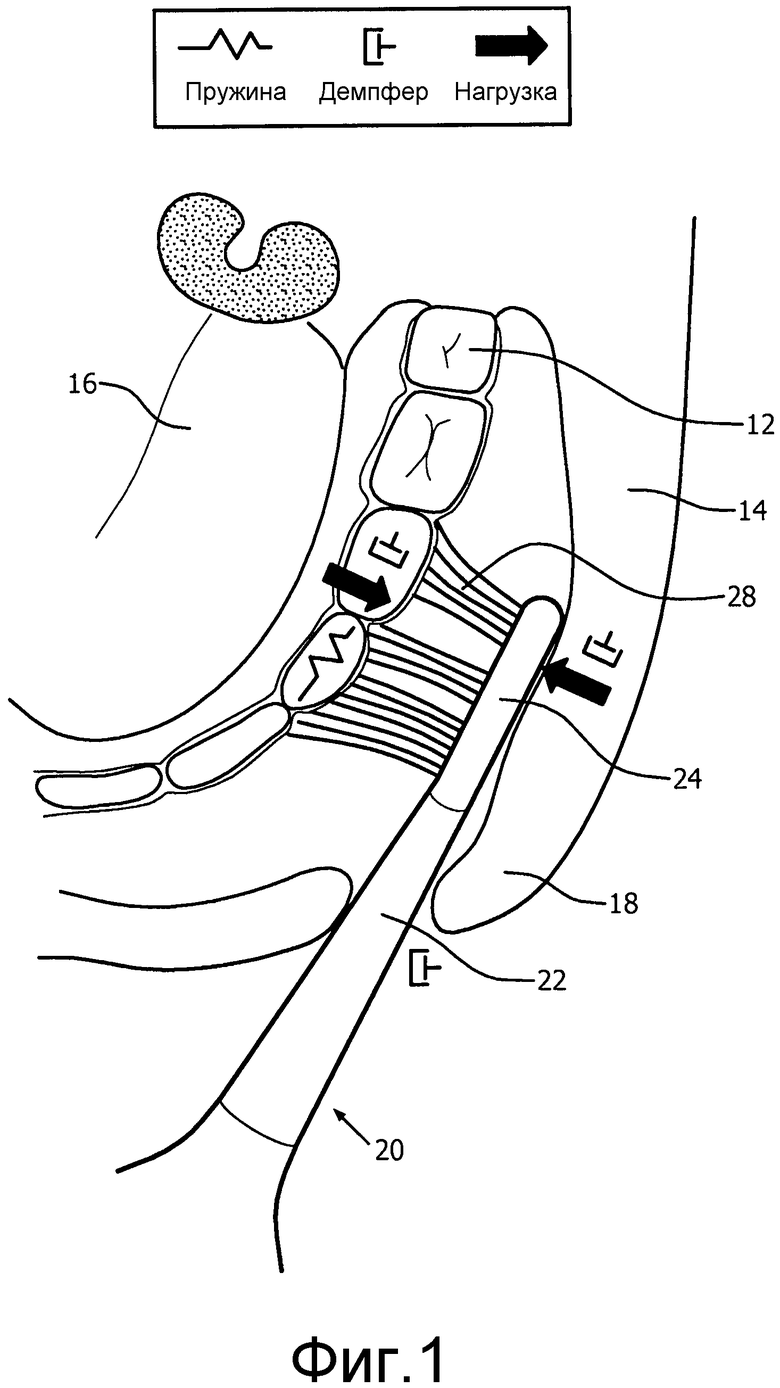
1. Электрическая зубная щетка (29) с датчиком давления, содержащая:
приводной механизм (40), который в ответ на сигнал возбуждения создает чистящее действие посредством щетинок (34) блока (32) чистящей головки, соединенного с зубной щеткой (29);
магнит (48), соединенный с задним концом приводного механизма (40);
систему, содержащую первый датчик (53) Холла, для использования при определении значения прямой силы, создаваемой давлением, прикладываемым к зубам пользователя со стороны щетинок (34) блока (32) чистящей головки, при этом при приложении силы к щетинкам (34) задний конец приводного механизма (40) поворачивается вместе с магнитом, что создает боковое смещение магнита в направлении первого датчика Холла (53);
систему, включающую в себя второй датчик (52) Холла, для использования при определении значения динамической силы, создаваемой давлением, прикладываемым к зубам пользователя со стороны щетинок (34) блока (32) чистящей головки, при этом указанный второй датчик (52) Холла определяет изменение фазы между сигналом возбуждения и механическим откликом блока (32) чистящей головки, создаваемое перемещением магнита (48) при изменении давления на щетинки (34); и
систему (46) обработки, которая в ответ на (i) результат измерения прямой силы, создаваемой давлением, и (ii) результат измерения динамической силы, создаваемой давлением, регулирует точку срабатывания так, что она либо (a) остается неизменной, либо (b) уменьшается относительно предварительно установленной точки срабатывания, равной 300 граммам или другому установленному значению, при этом точка срабатывания соответствует величине давления, характеризующей приложение чрезмерной силы со стороны щетинок к зубам пользователя относительно динамических нагрузок, создаваемых различными участками полости рта пользователя.
2. Электрическая зубная щетка (29) по п.1, в которой измерение прямой силы представляет собой измерение смещения, с использованием зависимости, связывающей выходное напряжение первого датчика (53) Холла со смещением магнита (48), которое, в свою очередь, соответствует силе, приложенной к щетинкам (34) блока (32) чистящей головки.
3. Электрическая зубная щетка (29) по п.2, в которой определение результата измерения прямой силы, создаваемой давлением, дополнительно включает в себя определение информации о смещении посредством первого датчика (53) Холла и магнита (48).
4. Электрическая зубная щетка (29) по п.1, в которой система (46) обработки дополнительно в ответ на информацию о сдвиге фазы выходного сигнала указанного второго датчика (52) Холла относительно фазы сигнала возбуждения определяет результат измерения динамической силы.
5. Электрическая зубная щетка по п.3, в которой первый датчик (53) Холла системы для использования при определения результата измерения прямой силы, создаваемой давлением, установлен в переменном магнитном поле, создаваемом магнитом (48) на заднем конце приводного механизма (40), при этом выходной сигнал первого датчика (53) Холла изменяется от ненагруженного состояния в зависимости от смещения заднего конца приводного механизма (40) вследствие давления на щетинки (34) чистящего элемента блока (32) чистящей головки, причем система (46) обработки дополнительно в ответ на (a) выходной сигнал датчика Холла и (b) хранящуюся информацию выдает сигнал, характеризующий давление, приложенное к щетинкам (34) блока (32) чистящей головки во время чистки, на основе информации о смещении.
6. Электрическая зубная щетка (29) по п.4, в которой система (46) обработки дополнительно определяет сдвиг фазы выходного сигнала указанного второго датчика (52) Холла вследствие нагрузки, прикладываемой к щетинкам (34) блока (32) чистящей головки во время чистки, в соответствии с хранящейся информацией, связывающей значения сдвига фазы с нагрузкой.
7. Электрическая зубная щетка (29) по п.6, в которой система (46) обработки дополнительно включает в себя схему перехода через ноль для определения сдвига фазы.
8. Электрическая зубная щетка (29) по п.4, в которой система (46) обработки дополнительно выполнена с возможностью усреднения выходного сигнала указанного второго датчика (52) Холла по нескольким циклам и фильтрации шума от выходного сигнала указанного второго датчика (52) Холла.
9. Электрическая зубная щетка (29) по п.1, в которой информация о смещении, определяемая посредством системы определения результата измерения прямой силы, создаваемой давлением, и информация о сдвиге фазы, определяемая посредством системы определения результата измерения динамической силы, создаваемой давлением, определяются непрерывно.
10. Электрическая зубная щетка (29) по п.2, в которой в ответ на положительный результат измерения смещения система (46) обработки не изменяет точку срабатывания и использует предустановленную точку срабатывания в качестве точки срабатывания.
11. Электрическая зубная щетка (29) по п.2, в которой в ответ на отрицательный результат определения смещения система (46) обработки использует предустановленное значение точки срабатывания в качестве точки срабатывания в сочетании с отсутствием срабатывания предупреждающего сигнала об избыточном давлении.
12. Электрическая зубная щетка (29) по п.2, в которой в ответ на приблизительно равный нулю результат измерения смещения, небольшой сдвиг фазы выходного сигнала первого датчика (53) Холла и уменьшение двойной амплитуды перемещения щетинок при движении, определенной посредством системы определения результата измерения прямой силы, создаваемой давлением, или посредством системы определения результата измерения динамической силы, создаваемой давлением в средней степени, на 25% система (46) обработки снижает точку срабатывания относительно предустановленной точки срабатывания.
13. Электрическая зубная щетка (29) по п.2, в которой в ответ на приблизительно равный нулю результат измерения смещения, небольшой сдвиг фазы выходного сигнала первого датчика (53) Холла и уменьшение двойной амплитуды перемещения щетинок при движении, определенной посредством системы определения результата измерения прямой силы, создаваемой давлением, или посредством системы определения результата измерения нормальной динамической силы, создаваемой давлением, на 40% система (46) обработки снижает точку срабатывания относительно предустановленной точки срабатывания.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP 0 158 870 A1, 23.10.1985 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

