Заявляемый биокинетический тренажер относится к области средств общефизической тренировки и оздоровления опорно-двигательной системы человека в условиях невесомости.
Известные тренажеры, используемые на МКС, такие, как беговая дорожка, велотренажер, а также специальные космические тренажеры ARED, в которых набор цилиндров, дисков и резиновых соединений обеспечивает нагрузку до 600 кг, не обеспечивают комплексной динамичной тренировки всей опорно-двигательной системы и по конструкции не могут рассматриваться как близкие прототипы к заявляемому биокинетическому тренажеру Ахметова.
Наиболее близким к заявляемому изобретению является принятый за прототип тренажер, патент № RU 2155622, содержащий несущую основу и смонтированные на ней две кинематически связанных между собой пары кривошипов, одна из которых оснащена держателями для рук, а на другой паре кривошипов установлены опорные устройства для ног.
Основными недостатками известного тренажера являются невозможность его использования в условиях невесомости, а также неприспособленность к установке в условиях ограниченного пространства МКС.
Задачей заявляемого изобретения является создание простого, компактного и эффективного тренажера для комплексной тренировки опорно-двигательной системы человека в условиях невесомости и ограниченного пространства.
Технический результат в заявляемом изобретении, охарактеризованном в пункте 1 формулы, содержащем:
- несущий элемент,
- установленный на несущем элементе биокинетический модуль, состоящий из направляющего элемента, в который вмонтированы две пары кривошипов, один для ручных опор и второй для ножных педалей, дистанция между парами кривошипов регулируемая, оси кривошипных пар имеют между собой кинематическую связь с передаточным числом 1:1,
достигается за счет того, что:
- несущий элемент оснащен узлами крепления, выполненными с учетом конструкции кабины и места установки в кабине,
- биокинетический модуль установлен на несущем элементе с возможностью отклонения от вертикального к несущему элементу положения в боковую сторону и последующего закрепления,
- ручные опоры и ножные педали выполнены складывающимися в нерабочем положении,
- тренажер оснащен приспособлением для создания регулируемой тренировочной нагрузки, состоящим из изменяемых по длине специальных стяжек и накладки для спины, специальные стяжки крепятся одним концом к несущему элементу, вторым к накладке для спины таким образом, чтобы тело тренирующегося могло регулируемо притягиваться к опорам как минимум в трех местах - плечи, поясница, тазобедренная область,
- тренажер оснащен вторым приспособлением для создания регулируемой тренировочной нагрузки на ручные опоры и ножные педали,
- ручные опоры и ножные педали закреплены во взаимоположении, обеспечивающем естественную координацию движения опорно-двигательной системы человека,
- держатели для рук и ножные педали могут быть закреплены с возможностью установки и фиксации в одном направлении от оси вращения или по разные стороны от оси вращения под углом 180° друг к другу.
Кинематическая связь кривошипных пар с передаточным числом 1:1 и соответствующее взаимоположение ручных опор и ножных педалей принудительно обеспечивает естественную координацию движений опорно-двигательной системы тренирующегося.
Складывающиеся ручные опоры и педали и складывающийся биокинетический модуль обеспечивают экономию пространства кабины.
Специальные стяжки обеспечивают имитацию гравитационной нагрузки на опорно-двигательную систему тренирующегося, что способствует замедлению процессов деминерализации костной ткани и ослабления механической прочности скелета. Специальные стяжки, как простейший вариант, могут быть выполнены из резины.
Приспособление для создания тренировочной нагрузки на ручные опоры и ножные педали обеспечивает физическую нагрузку на опорно-двигательную систему в движении.
Возможность закрепления держателей для рук и ножных педалей в одном направлении от оси вращения или по разные стороны от оси вращения под углом 180° друг к другу обеспечивает разнообразие упражнений и более полную разработку позвоночного столба и всей опорно-двигательной системы.
В итоге заявляемый биокинетический тренажер Ахметова обеспечивает:
- разнообразие выполняемых движений и динамических воздействий на опорно-двигательную систему,
- хорошую физическую нагрузку практически на все основные группы мышц и суставы тренирующегося,
- хорошую проработку мышц и суставов позвоночного столба,
- активизацию обменных процессов в организме и повышение тонуса,
- тренировку дыхательной и сердечно-сосудистой системы,
- интенсивную инерционную встряску-массаж внутренних органов, включая спинной мозг,
- тренировку вестибулярного аппарата и пространственной координации движений.
В результате применения биокинетического тренажера Ахметова достигается:
- укрепление и поддержание в тонусе мышц и суставов опорно-двигательной, а также дыхательной и сердечно-сосудистой систем в целом,
- предотвращение мышечной атрофии,
- замедление процесса деминерализации костной ткани и ослабления механической прочности скелета,
- поддержание в норме физической работоспособности.
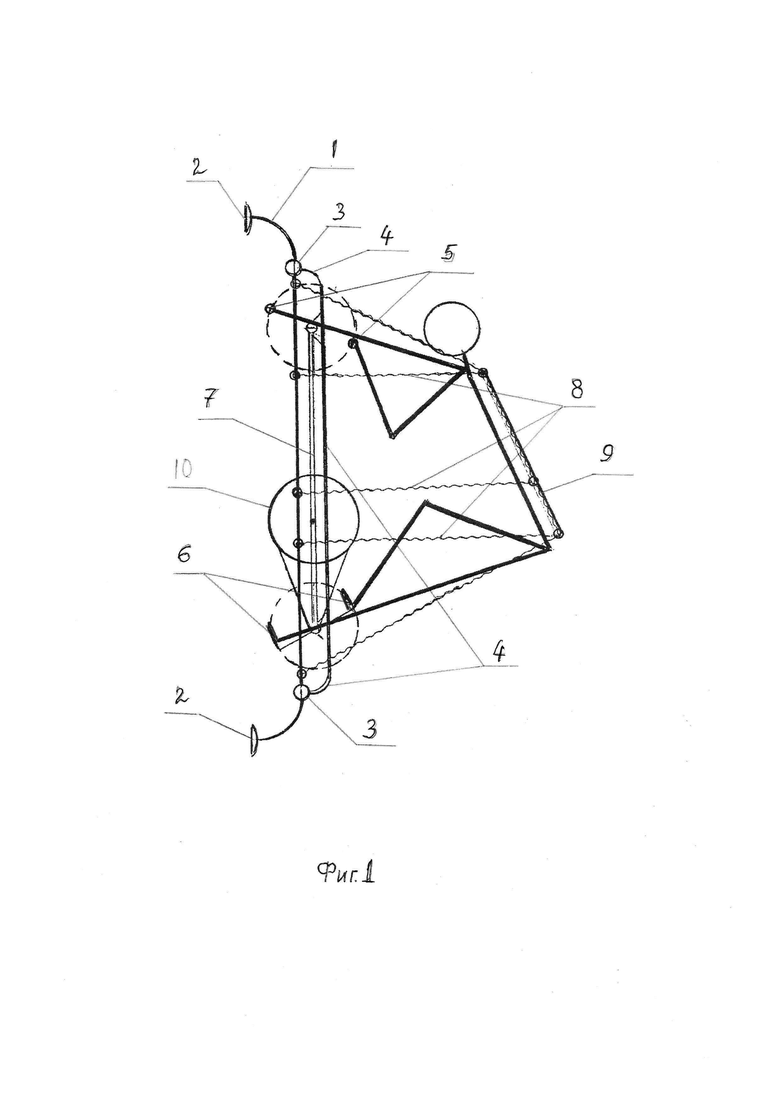
На Фиг. 1 представлена общая схема биокинетического тренажера Ахметова для укрепления опорно-двигательного аппарата человека в условиях невесомости, вид сбоку, биокинетический модуль показан закрепленным в рабочем положении.
Заявляемый биокинетический тренажер Ахметова состоит из несущего элемента (1), оснащенного узлами крепления системы (2), на несущем элементе посредством узлов фиксации (3) установлен биокинетический модуль, состоящий из направляющего элемента (4), в который вмонтированы две пары кривошипов, один для ручных опор (5) и второй для ножных педалей (6), оси кривошипных пар имеют между собой кинематическую связь (7) с передаточным числом 1:1,
приспособление для создания регулируемой тренировочной нагрузки выполнено из изменяемых по длине специальных стяжек (8) и накладки для спины (9),
второе приспособление для создания регулируемой тренировочной нагрузки на ручные опоры и ножные педали (10) установлено на направляющей биокинетического модуля (4).
Заявляемый биокинетический тренажер Ахметова для укрепления опорно-двигательной системы человека в условиях невесомости используется следующим образом:
- биокинетический модуль переводится из сложенного в рабочее положение и фиксируется вертикально на несущем элементе,
- переводятся в рабочее положение держатели для рук и ножные педали,
- устанавливается положение ручных держателей и ножных педалей - в одном направлении от оси вращения или по разные стороны - под углом 180° друг к другу,
- устанавливается расстояние между осями вращения ручных опор и ножных педалей в соответствии с ростом тренирующегося,
- тренирующийся пристегивает накладку для спины, фиксирует ступни ног на педалях и берется за ручные опоры, регулирует сам или с помощью ассистента натяжение специальных стяжек,
- устанавливается необходимый уровень тренировочной нагрузки на втором приспособлении.
Тренировка осуществляется вращением ручных держателей и ножных педалей, при этом тренирующийся создает большое разнообразие скручивающих и изгибающих позвоночник моментов, вовлекая в работу все группы мышц позвоночного столба и опорно-двигательного аппарата в целом.
Описанный выше вариант исполнения биокинетического тренажера Ахметова, показанный на Фиг. 1, следует рассматривать во всех аспектах только как иллюстративный, но не ограничивающий. Совершенно ясно, что другие варианты исполнения могут быть осуществлены без отступления от сущности и объема настоящего изобретения.
В условиях невесомости происходит нарушение нормальной координации движений, ослабляется сердечно-сосудистая система, нарушается обмен веществ, отсутствие веса ведет к мышечной атрофии, потере кальция и уменьшению прочности костей. Наиболее приемлемым способом противостоять перечисленным нарушениям являются - движение и физическая активность. Биокинетический тренажер для укрепления опорно-двигательной системы человека в условиях невесомости позволяет в определенной мере имитировать гравитацию, компенсировать недостаток движений и поддерживать в норме координацию движений опорно-двигательного аппарата. Основу биокинетического тренажера для укрепления опорно-двигательной системы человека в условиях невесомости составляют: биокинетический модуль, состоящий из кинетически соединенных ручных опор и ножных педалей, обеспечивающий координацию движений опорно-двигательного аппарата и вовлекающий в разработку практически все основные группы мышц организма; и приспособление для имитации земного притяжения, состоящее из накладки для спины и стяжек. Биокинетический тренажер для укрепления опорно-двигательной системы человека в условиях невесомости не содержит сложных элементов, прост в изготовлении, не занимает много места, удобен и эффективен в применении. Представляется целесообразным применение биокинетического тренажера для укрепления опорно-двигательной системы человека в условиях невесомости как отдельно так и комплексно в сочетании с беговой дорожкой и специальным космическим тренажером ARED. 1 з.п. ф-лы, 1 ил.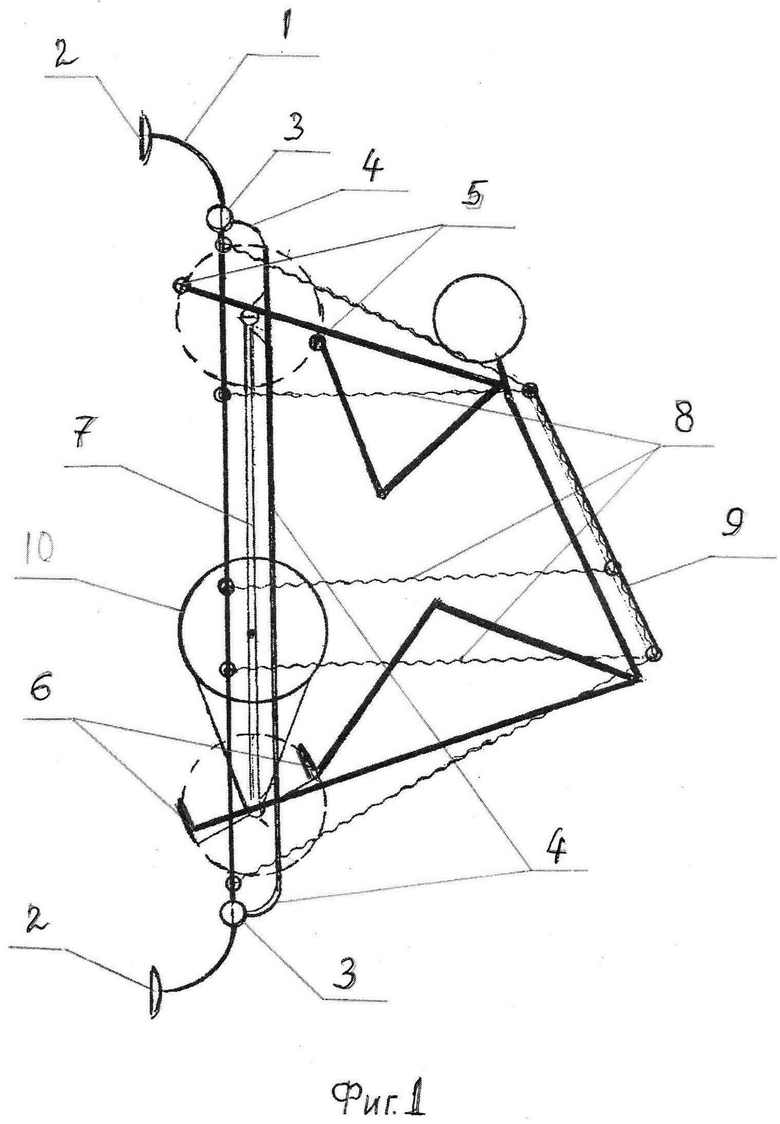
1. Биокинетический тренажер для укрепления опорно-двигательной системы человека в условиях невесомости, содержащий:
- несущий элемент,
- установленный на несущем элементе биокинетический модуль, состоящий из направляющего элемента, в который вмонтированы две пары кривошипов, один для ручных опор и второй для ножных педалей, дистанция между парами кривошипов регулируемая, оси кривошипных пар имеют между собой кинематическую связь с передаточным числом 1:1,
- несущий элемент оснащен узлами крепления, выполненными с учетом конструкции кабины и места установки в кабине,
- биокинетический модуль установлен на несущем элементе с возможностью отклонения от вертикального к несущему элементу положения в боковую сторону и последующего закрепления,
- ручные опоры и ножные педали выполнены складывающимися в нерабочем положении,
- тренажер оснащен приспособлением для создания регулируемой тренировочной нагрузки, состоящим из изменяемых по длине стяжек и накладки для спины, стяжки крепятся одним концом к несущему элементу, вторым к накладке для спины таким образом, чтобы тело тренирующегося могло регулируемо притягиваться к тренажеру как минимум в трех местах - плечи, поясница, тазобедренная область,
- тренажер оснащен вторым приспособлением для создания регулируемой тренировочной нагрузки на ручные опоры и ножные педали.
2. Биокинетический тренажер для укрепления опорно-двигательной системы человека в условиях невесомости по п. 1, отличающийся тем, что держатели для рук и ножные педали закреплены с возможностью установки и фиксации в одном направлении от оси вращения или по разные стороны от оси вращения под углом 180° друг к другу.
| ТРЕНАЖЕР ДЛЯ РАЗРАБОТКИ И УКРЕПЛЕНИЯ ПОЗВОНКОВЫХ СУСТАВОВ И ГЛУБОКИХ МЫШЦ ПОЗВОНОЧНОГО СТОЛБА И ИСПРАВЛЕНИЯ ОСАНКИ | 2000 |
|
RU2200604C2 |
| ТРЕНАЖЕР ДЛЯ РАЗРАБОТКИ И УКРЕПЛЕНИЯ ПОЗВОНКОВЫХ СУСТАВОВ, ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И ИСПРАВЛЕНИЯ ОСАНКИ И ЕГО ВАРИАНТЫ | 1999 |
|
RU2155622C1 |
| ПРИВОД К МЕХАНИЧЕСКИМ И МУСКУЛЬНЫМ ТРАНСПОРТНЫМ СРЕДСТВАМ С АВТОМАТИЧЕСКИМ ИЗМЕНЕНИЕМ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 2000 |
|
RU2202491C2 |
| Способ растворения гидроокиси железа, осевшей в порах призабойной зоны пласта | 1952 |
|
SU96331A1 |

