Изобретение относится к области транспортирования, к устройствам для приведения в действие колесных транспортных средств.
Известно техническое решение мускульного привода, содержащее несущую раму, закрепленную на раме ось с двумя приводными рычагами, оснащенными педалями, закрепленную на раме посредством оси каретку ведущего колеса, имеющую две обгонные муфты с барабанами, кинематически связанными зубчатыми передачами с приводными рычагами.
Недостатком известного технического решения является низкая надежность, значительная масса из-за наличия открытой зубчатой передачи и независимость скорости движения от усилия крутящего момента (SU 1018872, G 02 М 1/04, 1983 г.).
Наиболее близким техническим решением к заявленному является мускульный привод транспортного средства, содержащий несущую раму, закрепленный на раме вал с двумя приводными рычагами, оснащенными педалями, закрепленную на несущей раме посредством оси каретку ведущего колеса, имеющую две обгонные муфты с барабанами, кинематически связанными гибкими тягами с приводными рычагами, и связанные с гибкими тягами упругодеформируемые элементы (SU 1232556, В 62 М 1/02, 1986 г.).
Недостатком прототипа является независимость скорости движения ведущего колеса от усилия - крутящего момента на приводе.
Задачей патентуемого изобретения является создание механизма, автоматически и плавно изменяющего передаточное отношение в зависимости от нагрузки на ведомом звене.
Указанная задача в частности решается за счет того, что в приводе транспортного средства, содержащем несущую раму, закрепленный на раме вал с двумя приводными рычагами, оснащенными педалями, закрепленную на несущей раме посредством оси каретку ведущего колеса с двумя обгонными муфтами, барабаны которых имеют кинематическую связь гибкими тягами с приводными рычагами, выполненную с возможностью взаимодействия с упругодеформируемыми элементами, кинематическая связь выполнена с возможностью передачи тягового усилия через упругодеформируемые элементы.
А также за счет того, что гибкие тяги соединены с приводными рычагами упругодеформируемыми элементами.
А также за счет того, что привод снабжен спиральными пружинами, одним концом связанными с осью каретки ведущего колеса, а другим - с барабанами обгонных муфт.
А также за счет того, что приводные рычаги выполнены в виде двух жестко связанных частей, при этом часть, связанная с педалью, расположена под углом к части, связанной с валом.
На фиг.1 схематично показан общий вид мускульного привода;
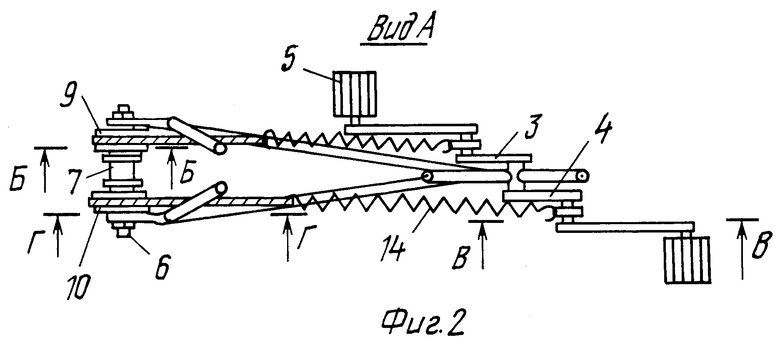
на фиг.2 схематично показан вид А;
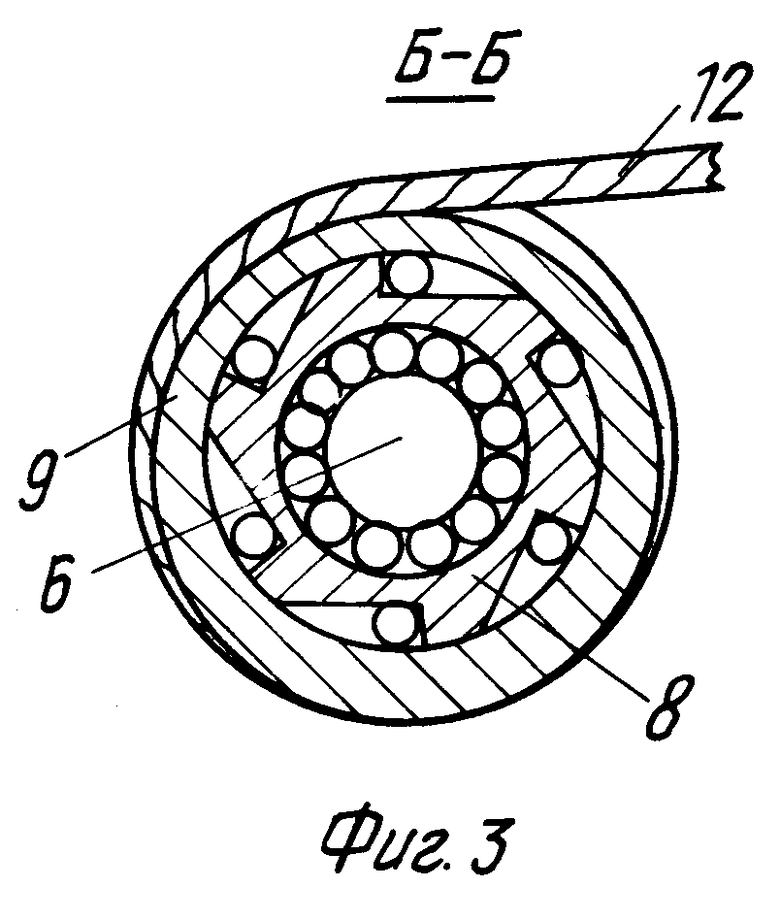
на фиг.3 - сечение Б-Б на виде А;
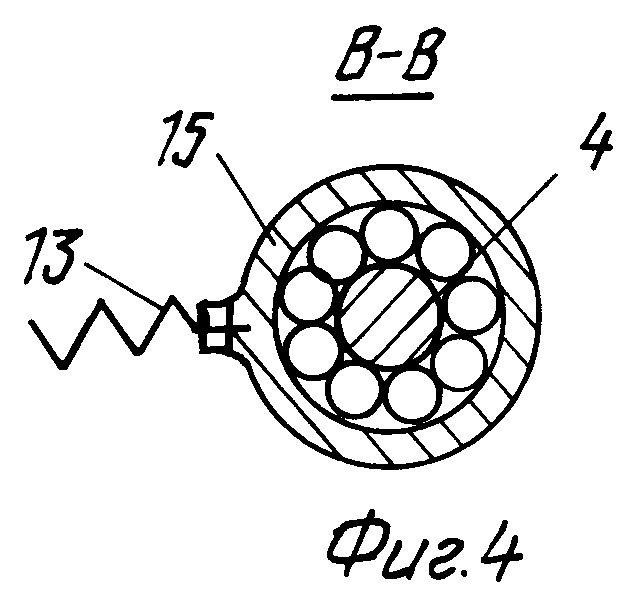
на фиг.4 - сечение В-В на виде А;
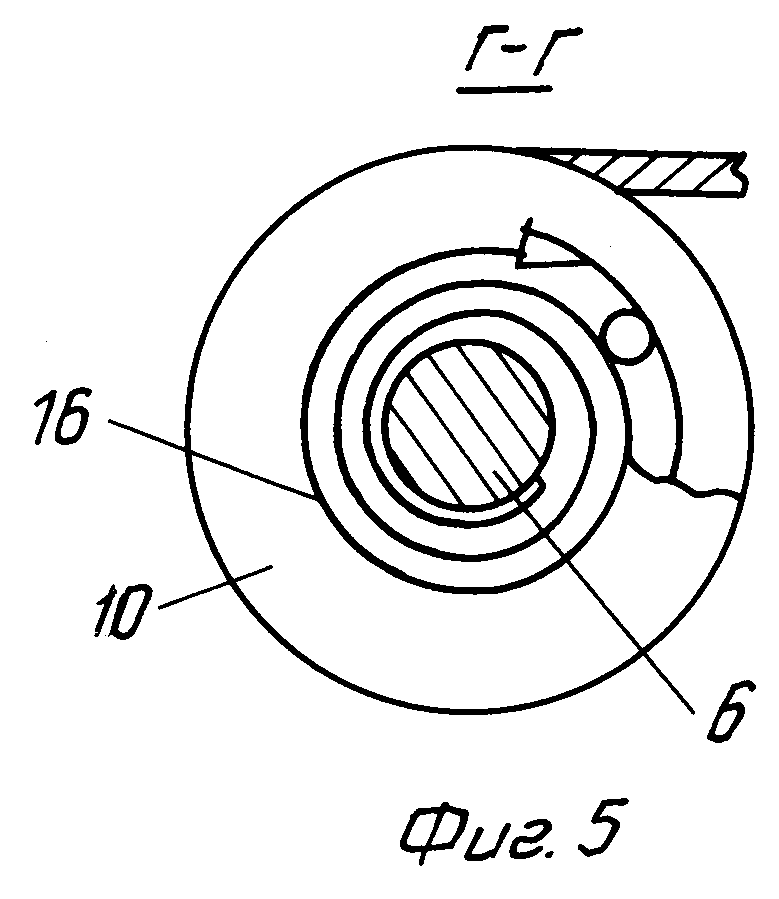
на фиг.5 - сечение Г-Г на виде А.
Мускульный привод имеет несущую раму 1, закрепленный на раме вал 2 с двумя приводными рычагами 3 и 4, оснащенными педалями 5, расположенными под углом к приводным рычагам 3 и 4. На несущей раме 1 посредством оси 6 закреплена каретка 7 ведущего колеса (не показано) с двумя обгонными муфтами 8, барабаны 9 и 10 которых кинематически связаны гибкими тягами 11 и 12 с приводными рычагами 3 и 4 с возможностью передачи тягового усилия через упругодеформируемые элементы 13 и 14 (например, пружины) и шарниры 15. На оси 6 размещены спиральные пружины 16, один конец которых закреплен на оси 6, а другой - на соответственно барабанах 9 и 10 обгонных муфт 8.
Приводные рычаги 3 и 4 выполнены в виде двух жестко связанных частей 17 и 18, одна из которых, связанная с педалью 5, расположена под углом к части 17, связанной с валом 2.
Мускульный привод работает следующим образом.
Приводные рычаги 3 и 4 приводятся во вращение воздействием на педали 5. Приводной рычаг 4 через упругодеформируемый элемент 14 и гибкую тягу 12 приводит во вращательное движение барабан 10 и каретку 7 через обгонную муфту 8, После прохождения приводным рычагом 4 передней мертвой точки барабан 10 вращается в противоположном направлении и возвращается в исходное положение под воздействием спиральной пружины 16.
С ростом нагрузки (сопротивления движению) на каретке 7 упругодеформируемый элемент 14 растягивается и угол поворота барабана 10 уменьшается. После прохождения приводным рычагом 4 передней мертвой точки растянутый упругий элемент 14 продолжает передавать тяговое усилие привода на каретку ведущего колеса.
После возвращения упругодеформируемого элемента 14 в исходное состояние барабан 10 под воздействием спиральной пружины 16 возвращается в исходное положение. Аналогичный цикл работы элементов привода повторяется при последующем аналогичном движении приводного рычага 3, обеспечивая равномерность движения.
Неравномерность хода педалей 5 частично компенсируется упругодеформируемыми элементами 13 и 14 и частично - свободным ходом каретки 7 относительно барабанов 9 и 10 через обгонные муфты 8.
Расположение части приводного рычага с педалью 5 под углом к части, связанной с валом 2, способствует наиболее эффективному приложению усилия.
Таким образом, с ростом нагрузки на ведущем колесе уменьшается пройденный им путь за один полный оборот рычага, то есть изменяется передаточное отношение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| Канатная дорога | 1991 |
|
SU1796512A1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| Транспортное средство с мускульным приводом | 1986 |
|
SU1311996A1 |
| Велосипед | 1990 |
|
SU1703542A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2000 |
|
RU2160682C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| УСТРОЙСТВО ТРАНСЛЯЦИИ МУСКУЛЬНЫХ УСИЛИЙ ЧЕЛОВЕКА НА ОБОД ВЕДУЩЕГО КОЛЕСА ДОРОЖНО-ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2739642C1 |
Изобретение относится к приводу с упругими элементами. Тяговое усилие от рычагов 3, 4 передается на барабаны каретки колеса посредством гибких тяг 11, 12 и упругих элементов 13, 14. При росте сопротивления движению упругие элементы растягиваются и угол поворота барабанов уменьшается. После прохождения рычагом 4 передней мертвой точки упругий элемент 14 имеет возможность передачи тяги на барабан 10 за счет накопленной энергии. Связанная с осью барабана 10 спиральная пружина возвращает барабан 10 в исходное положение. Расположение одной части 18 рычага с педалью 5 под углом к части 17, связанной с валом 2, способствует эффективности приложения усилия. Предлагаемое техническое решение направлено на изменение передаточного отношения привода в зависимости от сопротивления движения. 3 з.п. ф-лы, 5 ил.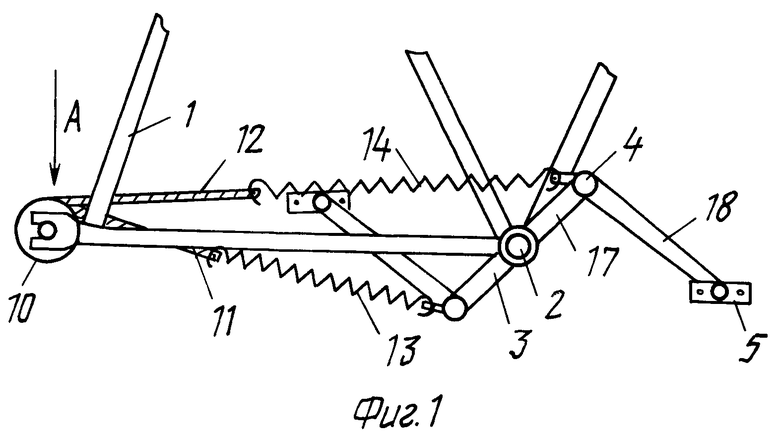
| Привод велосипеда с переключателем передач | 1985 |
|
SU1316905A1 |
| Педальный привод транспортного средства | 1981 |
|
SU1018872A1 |
| Мускульный привод транспортного средства | 1984 |
|
SU1232556A1 |
| ДВУХРЕПЕТИЦИОННЫЙ МЕХАНИЗМ ПИАНИНО | 2011 |
|
RU2463332C1 |
| US 4925199, 15.05.1990 | |||
| US 5035678 | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Мускульный привод транспортного средства | 1987 |
|
SU1477619A1 |
| СПОСОБ ПОЛУЧЕНИЯ УГЛЕВОДОРОДОВ ИЗ ГАЗООБРАЗНОГО УГЛЕВОДОРОДНОГО СЫРЬЯ | 2003 |
|
RU2316530C2 |
| RU 97119597 А, 20.08.1999 | |||
| US 5338277, 16.08.1994 | |||
| Самокат | 1984 |
|
SU1221026A1 |
| Способ изготовления бетонных изделий | 1978 |
|
SU694470A1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ СОДЕРЖИМОГО СТРАНИЦЫ | 2014 |
|
RU2660615C2 |

