Изобретение относится к гидролокации и может быть применимо в сейсморазведке и ультразвуковой диагностике для распознавания материалов объектов (целей) любой формы.
Известны способы и устройства распознавания (или классификации гидролокационных целей (или объектов) по акустической жесткости (см. патент ФРГ №2006152 МКИ G01S 15/00, публикация 1977 г.; авторское свидетельство СССР №1210571 МКИ G01S 15/00, публикация 1983 г.; патент РФ №2006876 С1 МКИ G01S 15/00, публикация от 30.01.1994 г.; патент РФ №2006877 C1 МК G01S 15/00, публикация от 30.01.1994 г.; патент РФ №2050558 МКИ G01S 15/00, публикация от 20.12.1995 г.; патент РФ №2149424 МКИ G01S 15/00, 15/87, публикация от 20.05.2000 г. и др.)
В известных способах и устройствах используется излучение гидроакустических тональных зондирующих импульсов и прием отраженных сигналов. По отраженным сигналам определяется жесткость гидролокационных целей (или объектов). Отражения звуковых колебаний от акустически жестких тел, импедансы которых z2 больше, чем у воды z1(z2>z1), происходит практически без изменения фазы. Напротив, отражение от акустически мягких тел (z2<z1) сопровождается изменением фазы звуковых колебаний почти на 180°.
Это свойство отраженных сигналов используют при распознавании материалов тел. Таким образом, можно отличать твердые тела (металлические предметы, горные породы и т.д.) от акустически мягких тел (косяков рыб, тонких воздухозаполненных оболочек и др.). Отражение от большинства рыб на частотах 20-30 кГц определяется в основном отражением от их воздушных пузырей, при этом наблюдается изменение фазы эхо-сигнала, близкое к 180°.
В процессе распространения акустических сигналов в водной среде начальная фаза звуковых колебаний изменяется на неизвестную величину. Точность, с которой известно расстояние от излучателя до отражателя, недостаточна для оценки изменения фазовых соотношений в эхо-сигнале, возникающих в процессе их распространения. Поэтому для определения изменения фазы в эхо-сигнале при отражении используется сравнение ее с фазой некоторого опорного сигнала, распространяющегося совместно с измеряемым эхо-сигналом. С этой целью излучают одновременно два сигнала с отличающимися частотами ƒ1 и ƒ2. Выбирают частоту ƒ2, кратную ƒ1, чаще ƒ2=2ƒ1.
При отражении сигналов от распознаваемого тела формируются два эхо-сигнала на кратных частотах, которые упрощенно можно представить в виде:

где S1, S2 - амплитуды эхо-сигналов, пропорциональные коэффициентам отражения на частотах ƒ2 и ƒ1 соответственно;
ω1=2πƒ1, ω2=2πƒ2 - круговые частоты, ω2=2ω1;
kr, 2kr - фазовые изменения за счет распространения сигналов на расстояние r;
ϕ0 - начальная фаза колебаний, изменяющаяся в зависимости от акустического импеданса поверхности тела.
Эхо-сигналы s1(t), s2(t) принимаются раздельно в двух разных каналах, настроенных на частоты ƒ2 и ƒ1. Затем сигнал s1(t) возводится в квадрат:

При этом частота и начальная фаза преобразованного сигнала  удваиваются. Постоянная составляющая
удваиваются. Постоянная составляющая  сигнала
сигнала  исключается с помощью полосовой фильтрации. Различие в амплитудах сигналов и s2(t) устраняется регулировкой коэффициентов усиления в двух каналах приемного тракта. После удвоения начальная фаза сигнала теряет информацию об ее изменении, произошедшем в процессе отражения от поверхности тела, а начальная фаза s2(t) содержит эту информацию. Тогда ϕ0 в сигнале s2(t) может быть измерена относительно фазы опорного сигнала , имеющего ту же частоту, что и сигнал s2(t). Разность фаз сигналов и s2(t) может быть измерена, например, с помощью фазового детектора, либо в результате умножения этих сигналов и выполнения низкочастотной фильтрации:
исключается с помощью полосовой фильтрации. Различие в амплитудах сигналов и s2(t) устраняется регулировкой коэффициентов усиления в двух каналах приемного тракта. После удвоения начальная фаза сигнала теряет информацию об ее изменении, произошедшем в процессе отражения от поверхности тела, а начальная фаза s2(t) содержит эту информацию. Тогда ϕ0 в сигнале s2(t) может быть измерена относительно фазы опорного сигнала , имеющего ту же частоту, что и сигнал s2(t). Разность фаз сигналов и s2(t) может быть измерена, например, с помощью фазового детектора, либо в результате умножения этих сигналов и выполнения низкочастотной фильтрации:

В этом выражении амплитуды сигналов , s2(t) приняты равными (после регулировки коэффициентов усиления в каналах приемного тракта). Низкочастотная составляющая результирующего сигнала пропорциональна cosϕ0.
Недостатками этого способа являются: малая дальность действия, ограниченная затуханием волн частотой f2=2 f1; необходимость большого соотношения сигнал/шум, сложность классифицировать объекты, фаза коэффициента отражения от которых отлична от значения 0° и 180°, (например: от объектов со слоистой структурой, границ раздел сред, обладающих потерями и т.д.)
Авторами патента РФ №2050558 Гавриловым A.M. и Савицким О.А. описывается и решается задача увеличения дальности действия гидролокатора, и возможность обнаружения объектов, находящихся на малых расстояниях от излучающего преобразователя, находящихся в сильновязких вредах, объектов с произвольным коэффициентом отражения.
С этой целью для формирования зондирующих импульсов на кратных частотах предлагают применить параметрические излучатели. При излучении мощного акустического импульса с синусоидальным заполнением за счет нелинейности среды формируются гармонические составляющие на кратных частотах 2ƒ1, 3ƒ1, связанные по фазе с основным сигналом на частоте ƒ1. Амплитуды этих гармоник достигают величин 1/3-1/2 от амплитуды основного сигнала.
При распространение в нелинейной среде, обладающей квадратичной нелинейностью происходит квадратичное детектирование сигнала, т.е. генерация двух низкочастотных волн частотами Ω и 2Ω - так называемые первая и вторая волны разностной частоты (ВРЧ), которые можно представить в виде:
Где PΩm и P2Ωm - амплитуды звукового давления 1-й и 2-й ВРЧ.
Генерируемые 1-я и 2-я ВРЧ жестко связаны между собой по фазе. Принятые после отражения от объекта эхосигналы обеих ВРЧ будут иметь вид
Где: V и ϕ0 - модуль и фаза коэффициента отражения, L - Расстояние до объекта,
Величина ϕ0, в частности, равна нулю для акустически жесткого объекта, когда акустический импеданс Z2 является чисто активным и больше акустического импеданса среды Z1. При Z2<Z1 величина ϕ0=180°. Для сравнения фаз эхосигналов 1-й и 2-й ВРЧ их частоты приводят к одному значению: для этого частота 1-й ВРЧ удваивается путем возведения в квадрат сигнала и на его выходе получается сигнал:

Сравнивая фазы P2Ω и PΩ с помощью фазового детектора:

Увеличение дальности действия в предлагаемом патенте объясняется использованием в качестве рабочих более низкочастотных сигналов 1-й и 2-й ВРЧ вместо ранее применяемых высокочастотных сигналов.
Возможность обнаружения и классификации объектов в сильновязких средах объясняется также использованием низкочастотных волн разностной частоты в качестве носителей информации. Так как глубина проникновения волны в вязкую среду определяется протяженностью ее области затухания, то при квадратичном характере частотной зависимости вязкого поглощения:

с понижением частоты сигналов повышается дальность их проникновения.
В качестве прототипа принимается патент РФ №2006877 «Акустический эхо-импульсный локатор» - G01S 15/00. Дата подачи заявки 31.05.1991 г. Дата публикации 30.01.1994. Авторы Гаврилов A.M. и Савицкий О.А.
Авторы отмечают низкую надежность классификации объектов выше рассмотренным способом по акустической жесткости, обусловленную невозможностью однозначного отнесения обнаруженного объекта к одному из классов в случае нелинейной фазо-частотной характеристики коэффициента отражения, что имеет место у объектов со сложной внутренней структурой и конечными волновыми размерами. В таком случае фазовые набеги, возникающие при отражении у волн с частотами f1 и f2, существенно различаются в силу конечного разнесения частот (f2/f1=2). Чем больше различие в величинах сдвига фаз, тем ниже надежность классификации, поскольку этот способ классификации применим только к объектам, у которых фазовый сдвиг имеет одну и ту же величину для всех отраженных волн, т.е. с линейной фазо-частотной характеристикой. Целью патента №2006877 является повышение надежности классификации объектов по акустической жесткости.
Предлагается излучать в сторону отражающего объекта одновременно сигнал низкочастотной волны с частотой F и сигнал высокочастотной балансно-модулированной волны V(t, х)=Vm cos (2π Ft - - 2 л Fx/Co)]х cos (2π fot - 2π fox/Co), где F - частота модуляции; fo - несущая частота (частота заполнения), где fo>>F. При отражении балансно-модулированной волны сдвиг фаз испытывает только высокочастотное заполнение, в то время как огибающая не претерпевает фазовых сдвигов при любых соотношениях импедансов Z1 и Z2. Появление или отсутствие разности фаз величиной 180° (или близкой к этому значению) между пришедшими к низкочастотной обратимой антенне низкочастотным эхосигналом и модулирующей функцией вернувшегося к высокочастотной обратимой антенне балансно-модулированного эхосигнала указывает на характер жесткости отражающего объекта.
Этот способ, представленный в аналогах и прототипе - патенте РФ №2006877, а также разработанные на его основе устройства позволяют классифицировать объекты (гидролокационные цели) по акустической жесткости, то есть распознавать объекты 2 классов с акустическим импедансом z2 значительно большим акустического импеданса воды z1(z2>z1) (жесткие объекты из металла с толщиной оболочек, превышающих длину волны зондирующих посылок, сплошные металлические тела, камни и др.) от объектов с акустическим импедансом z3 значительно меньшим акустического импеданса воды z1(z3<z1) (тонкие металлические воздухозаполненные оболочки с толщиной, значительно меньшей длины волны зондирующих посылок, границы раздела вода-воздух, воздушные пузыри и др.) Но этим способом нельзя распознать материалы различных твердых объектов: металлические, деревянные, каменные, резиновые и др.). Для реализации этого способа, основанного на измерении разности фаз принимаемых гидролокационных сигналов, требуется обеспечивать высокое соотношение сигнал/помеха ~40 дБ и более, то есть этот способ имеет низкую помехоустойчивость.
Решаемой задачей настоящего предложения является разработка способа, позволяющего расширить диапазон распознаваемых материалов акустических целей и повысить помехоустойчивость распознавания.
Поставленная задача решается за счет того, что в предложенном способе распознавания материалов акустических целей, так же, как в известном облучают цель акустическими зондирующими импульсами, принимают отраженные сигналы и выполняют обработку отраженных сигналов. Но в отличие от известного в предлагаемом способе определяют возможные резонансные области частот колебаний облучаемой цели, например, расчетным путем на основе известных размеров цели с заданной погрешностью или излучением зондирующего импульса с высоким разрешением по дальности расположения отражающих элементов цели в направлении облучения и измерением времен и углов прихода отраженных импульсов, излучают широкополосные зондирующие импульсы, соответствующие по ширине полосы частот одной или нескольким определенным резонансным областям частот колебаний облучаемой цели, принимают отраженный сигнал, определяют спектр этого сигнала, в спектре выделяют существенные локальные максимумы и измеряют их амплитуду и ширину резонансной области частот по уровню 0,707 от максимальной амплитуды в каждой резонансной области спектра отраженного сигнала, вычисляют добротности в резонансных областях частот путем отношения максимальной амплитуды в резонансной области спектра сигнала к измеренной ширине полосы частотной области и распознают материал акустической цели по выделенным добротностям на основе решающего правила, сформулированного в результате анализа статических характеристик изменения добротностей известных материалов, например, на основе критерия Байеса.
Для реализации предложенного способа требуется соотношение сигнал/помеха на входе приемного тракта не более 10-12 дБ, что значительно меньше 40 дБ, необходимых для работы аналогов и прототипа.
Достигаемым техническим результатом является - расширение диапазона распознаваемых материалов акустических целей и повышение помехоустойчивости распознавания.
Результат достигается путем измерения добротностей в резонансных областях спектра отраженного от акустической цели сигнала и сопоставления их с добротностями известных материалов с помощью решающего правила.
На фиг. 1 приведен пример огибающей S(t) отраженного акустического сигнала, полученного в результате облучения цели зондирующим импульсом в высоким разрешением дальности расположения отражающих элементов цели, где:
1 - пример огибающей отраженного сигнала.
На фиг. 2 приведен пример добротностей различных материалов - Q:
2 - кварц,
3 - дюралюминий,
4 - химически чистый алюминий,
5 - строительная сосна,
6 - резина.
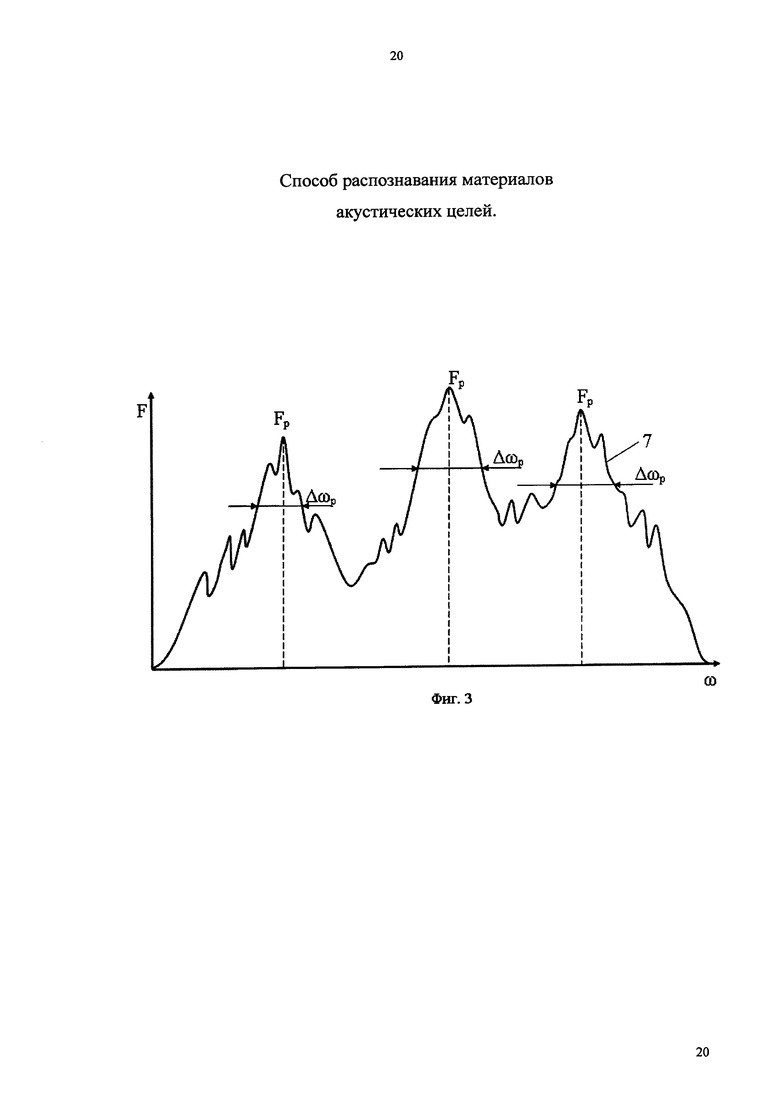
На фиг. 3 приведен пример спектра отраженного сигнала, где 7 - спектр отраженного сигнала.
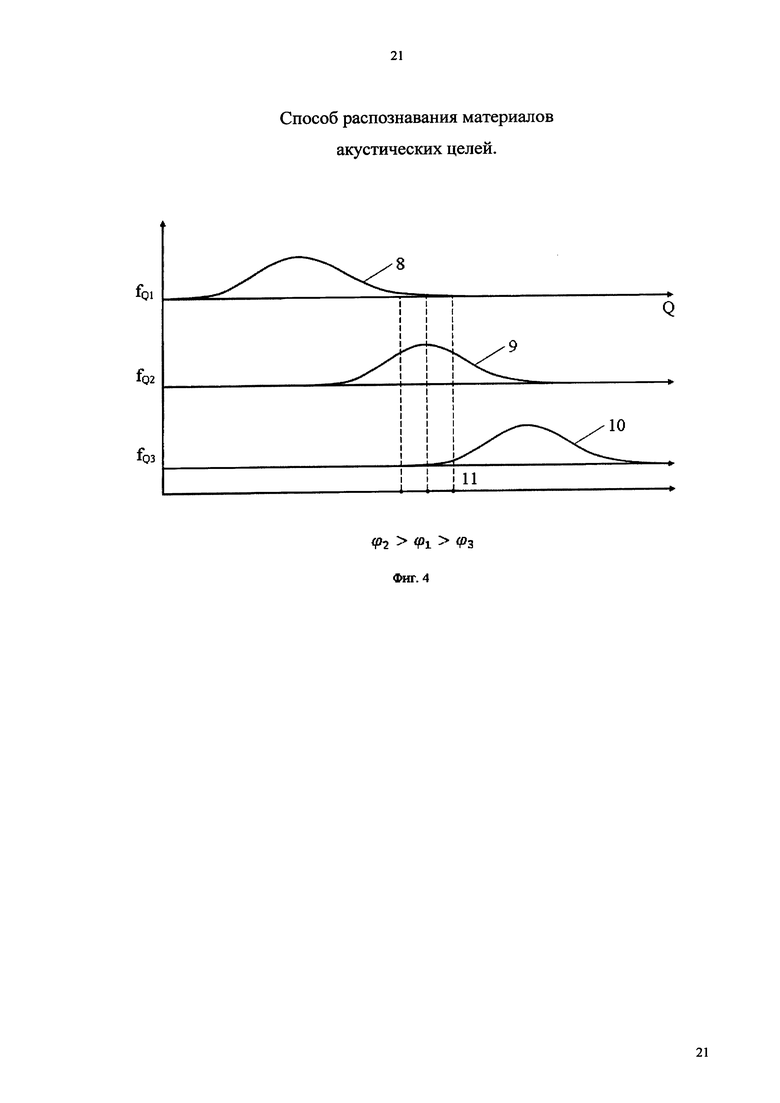
На фиг. 4 приведен пример распознавания материалов акустических целей, где:
8 - условная плотность вероятности добротностей 1 материала;
9 - условная плотность вероятности добротностей 2 материала;
10 - условная плотность вероятности добротностей 3 материала;
11 - результат расчетов добротностей по измеренному спектру отраженного сигнала.
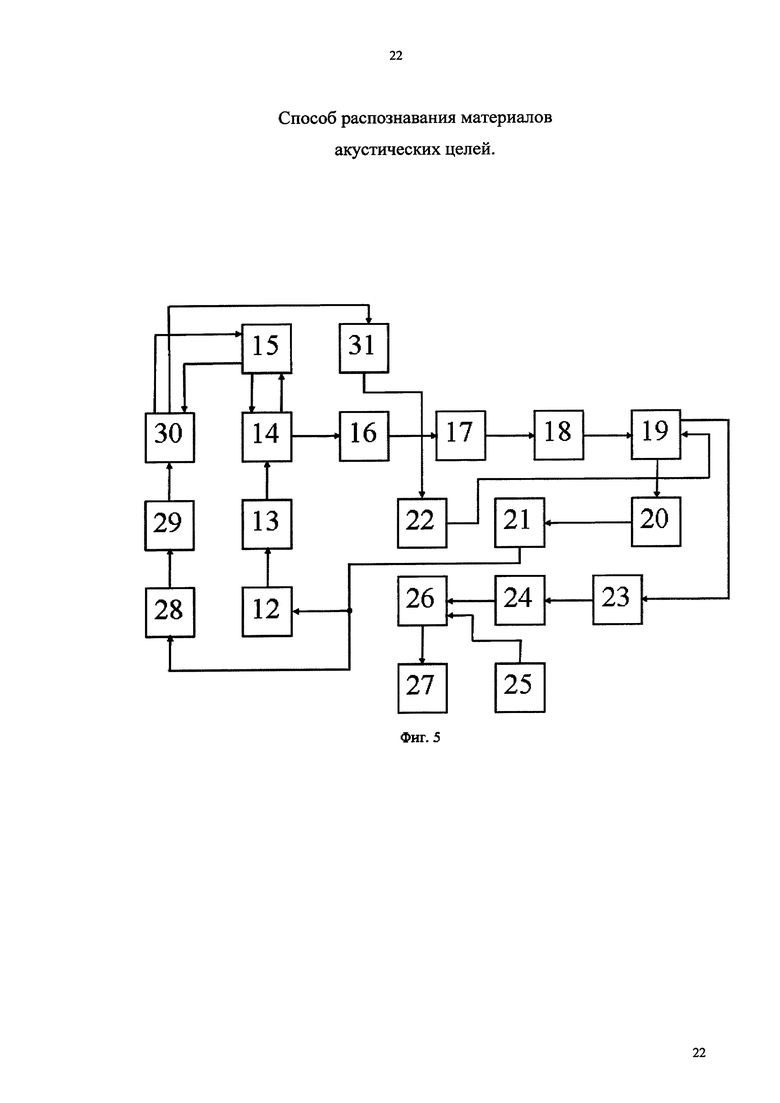
Предложенный способ может быть реализован устройством, функциональная схема которого приведена на фиг. 5, где:
12 - генератор зондирующих импульсов,
13 - усилитель мощности,
14 - приемо-излучающая антенна,
15 - облучаемая цель,
16 - блок усилителя приемного тракта,
17 - согласованный фильтр (или полосовой фильтр),
18 - детектор,
19 - блок выделения существенных локальных максимумов,
20 - измеритель временных интервалов между максимумами и длительностей сигналов,
21 - синхронизатор - управляющее устройство,
22 - спектроанализатор,
23 - измеритель максимальных амплитуд и ширины полосы резонансных областей частот,
24 - вычислитель добротностей,
25 - блок эталонных статических характеристик добротностей разных материалов,
26 - блок принятия решений,
27 - индикатор,
28 - генератор протяженных широкополосных зондирующих импульсов,
29 - усилитель мощности,
30 - приемо-излучающая антенна,
31 - усилитель приемного тракта.
После излучения зондирующего импульса с высоким разрешением по дальности расположения отдельных отражающих элементов акустической цели (короткого зондирующего импульса, пространственная длина которого равная половине произведения скорости распространения звука - с на длительность зондирующего импульса - τ3, значительно меньше расстояния между отражающими элементами цели Lj, то есть сτ3/2<<Lj, или сложного широкополосного зондирующего сигнала с произведением ширины полосы - F на длительность τ3 значительно большем единицы, Fτ3>1, обеспечивающим также разрешение отражений от отдельных элементов цели после согласованной фильтрации отраженного сигнала) определяется расстояние между отражающими элементами цели по временным задержкам - τj между отдельными максимумами в огибающей отраженного сигнала и протяженность цели в направлении облучения по длительности отраженного сигнала - τ (фиг. 1). При необходимости измеряются углы прихода для τj и τ.
Зная расстояние между отражающими элементами цели и (или) ее протяженность можно возбудить резонансные колебания цели путем облучения ее зондирующими сигналами, длина волны которых - X кратна протяженности цели - L или расстояниям между отдельными отражающими элементами цели - Lj. Возбуждение резонансных колебаний облучаемой цели осуществляется протяженным широкополосным зондирующим импульсом, составленным, например, из суммы протяженных тональных зондирующих посылок для повышения амплитуд колебаний облучаемой цели или последовательностью длинных тональных зондирующих импульсов с контролируемой амплитудой (лучше равными амплитудами) и отличающихся частотой заполнения в пределах частотной полосы, соответствующей по ширине полосы частот одной или нескольким определенным резонансным областям частот колебаний облучаемой цели. Далее принимается отраженный сигнал, вычисляется спектр принятого отраженного сигнала. В спектре сигнала определяются существенные локальные максимумы и соответствующие им отдельные резонансной области частот, а в них измеряются максимальная амплитуда Fp и ширина полосы частот по уровню 0,707 от максимальной амплитуды - Δω, рассчитываются добротности Q=Fp/Δω. Добротность колебаний разных материалов Q=1/η обратно пропорциональны коэффициенту потерь η, обусловленному диссипативными свойствами материалов. На фиг. 2 приведены добротности разных материалов в зависимости от частоты колебаний. На фиг. 3 приведен пример выделения существенных локальных максимумов в спектре гидролокационного сигнала - F(ω), измерение амплитуд этих максимумов - Fp, ширины полосы частот локальных резонансных областей - Δωр и расчет на их основе добротностей Q=Fp/Δωp.
На основе рассчитанных добротностей выполняется распознавание материалов гидролокационных целей по эвристическим или оптимальным решающим правилам, например, критериям Байеса, максимума апостериорной вероятности, максимального правдоподобия.
Построение оптимального байесовского решающего правила направлено на разделение признакового пространства на непересекающиеся области Dq для каждого q-го тела (или образа) в соответствии с априорной вероятностной информацией о распознаваемых телах: априорными вероятностями P(Ai) наличия i-x тел, условными плотностями вероятностей применяемых признаков (например, τ) ƒ(τ/Ai) и функцией потерь (штрафов) aiq. Разделение признакового пространства выполняется таким образом, чтобы минимизировать средний риск в принятии решения, определяемый, например, для одномерного признака τ в виде
при условии
где аiq - штраф за решение о принадлежности признака τи, выделенного в измеренном эхо-сигнале, к q-му телу, если в действительности τи принадлежит i-му телу,
Dq - непересекающиеся области существования признака τ для q-x тел,
М - количество распознаваемых тел.
Байесовское решающее правило устанавливает принадлежность выделенного в измеренном эхо-сигнале признака τи к q-му телу (образу) при условии [Фукунага К. Введение в статистическую теорию распознавания образов. Пер. с английского М.: Наука 1979. 368 с.]:

для l≠q, где ƒ(τи/Ai) - значение функции правдоподобия, вычисленной для измеренного признака τи на основе известной условной плотности вероятности ƒ(τ/Ai) (в дальнейшем, без особой необходимости, вместо f(τи/Аi)) будет использоваться обозначение ƒ(τ/Ai)
Если функция потерь не может быть априори установлена, т.е. принято aii=0 - для правильных решений и аiq=1 - для неправильных решений, то байесовское решающее правило сводится к критерию максимума апостериорной вероятности. В соответствии с этим критерием измеренный признак т принадлежит i-му образу (телу) при условии:
для всех q≠i.
Решение о распознавании i-го тела принимается по максимальному значению из всех вычисленных по этой формуле апостериорных вероятностей. Формулу эту называют формулой Байеса, она определяет вероятность распознавания каждого q-го образа по результатам измерения признака τ. Критерий максимума апостериорной вероятности относится к рандомизированным решающим правилам, устанавливающим вероятность, с которой принимается решение в процессе распознавания.
Так как знаменатели в этой формуле одинаковы и не равны нулю, то решение о принадлежности измеренного признака τ к i-му телу может быть принято в случае
P(Ai)ƒ(τ/Ai)>P(Aq)ƒ(τ/Aq)
для всех q≠i.
При этом отсутствует оценка вероятности, с которой принимается каждое решение. Критерии максимума апостериорной вероятности обеспечивает минимальную вероятность ошибочного распознавания и называется иногда «критерием идеального наблюдателя». Если априорные вероятности P(Ai) наличия i-х тел не известны и приняты равными, то критерий максимума апостериорной вероятности сводится к критерию максимального правдоподобия:
τ∈Аi, если ∈(τ/Ai)>ƒ(τ/Aq)
для всех q≠i.
Условие принадлежности измеренного признака τ к i-му образу в соответствии с этим критерием может быть также записано в виде
где ϕi - значение функции правдоподобия для i-го тела.
Перед выполнением распознавания по оптимальным решающим правилам требуется выполнить аппроксимацию условных плотностей вероятностей используемых признаков, в данном случае добротностей Q в процессе проведения экспериментальных измерений сигналов, отраженных от целей с подлежащими распознаванию материалами. Одним из наиболее универсальных и распространенных при решении задач распознавания образов является метод аппроксимации, разработанный Парзеном и Розенблатом. Для наглядности пример распознавания материалов акустических целей по критерию максимального правдоподобия приведен на фиг. 4.
Здесь изображены условные плотности вероятностей 8-fQ1, 9-fQ2, 10-fQ3, характеризующие статистические распределения добротностей для 3-х разных материалов. Ниже представлены 11 - добротности Q, рассчитанные по измеренным параметрам Fp - максимальной амплитуде в резонансной области частот и Δωр - ширина резонансной области частот по уровню 0,707 от измеренной Fp. На основе этих добротностей вычисляются функции правдоподобия ϕ1, ϕ2, ϕ3 для трех измеренных добротностей. Во все случаях в данном примере ϕ2>ϕ1>ϕ3. Поэтому результат распознавания - материал 2.
Для измерения параметров Fp и Δωр требуется соотношение сигнал/помеха на входе приемного тракта не более 10-12 дБ, что значительно меньше 40 дБ, необходимых для работы устройств аналогов и прототипа.
В устройстве, реализующем предлагаемый способ (фиг. 5), генератор - 12 по команде от синхронизатора - управляющего устройства - 21 формирует зондирующий импульс с высоким разрешением по дальности (короткие или сложные зондирующие импульсы). Эти импульсы усиливаются в усилителе мощности - 13 и излучаются с помощью акустической антенны - 14. Отраженные от цели - 15 сигналы усиливаются в блоке усилителя приемного тракта - 16 и поступают на согласованный фильтр (или полосовой фильтр при использовании коротких зондирующих импульсов) - 17. Затем сигнал проходит через детектор - 18 и выделяется огибающая отраженного сигнала. Огибающая поступает в блок выделения существенных локальных максимумов -19, а затем на измеритель временных интервалов между максимумами и длительностей сигналов - 20. Измеренные временные интервалы и длительность отраженного сигнала поступают в синхронизатор - управляющее устройство 21, где формируется команда на генератор 28 для излучения протяженного широкополосного зондирующего импульса с шириной полосы, соответствующей одной или нескольким резонансным областям частот акустической цели. Эти импульсы усиливаются в усилителе мощности - 29 и излучаются с помощью антенны - 30. Отраженные от цели - 15 сигналы усиливаются в блоке усилителя приемного тракта - 31 и поступают в спектроанализатор - 22, где определяется спектр отраженного сигнала. Спектр поступает в блок выделения существенных локальных максимумов - 19, а затем в измеритель максимальных амплитуд и ширины резонансных областей частот - 23. На основе измеренных в блоке 23 параметров вычисляются добротности в блоке вычисления добротностей - 24. Вычисленные добротности поступают в блок принятия решений - 26, куда также попадает информация о статических характеристиках добротностей разных материалов из блока 25. Принятое решение высвечивается на индикаторе 27.
Изобретение относится к гидролокации и может быть применимо в сейсморазведке и ультразвуковой диагностике для распознавания материалов объектов (целей) любой формы. В данном изобретении определяют возможные резонансные области частот колебаний облучаемой цели, например, расчетным путем на основе известных размеров цели с заданной погрешностью или излучением зондирующего импульса с высоким разрешением по дальности расположения отражающих элементов цели в направлении облучения и измерением времен и углов прихода отраженных импульсов, излучают широкополосные зондирующие импульсы, соответствующие по ширине полосы частот одной или нескольким определенным резонансным областям частот колебаний облучаемой цели, принимают отраженный сигнал, определяют спектр этого сигнала, в спектре выделяют существенные локальные максимумы и измеряют их амплитуду и ширину резонансной области частот по уровню 0,707 от максимальной амплитуды в каждой резонансной области спектра отраженного сигнала, вычисляют добротности в резонансных областях частот путем отношения максимальной амплитуды в резонансной области спектра сигнала к измеренной ширине полосы частотной области и распознают материал акустической цели по выделенным добротностям на основе решающего правила, сформулированного в результате анализа статических характеристик изменения добротностей известных материалов, например, на основе критерия Байеса. Достигаемым техническим результатом является расширение диапазона распознаваемых материалов акустических целей и повышение помехоустойчивости распознавания. 5 ил.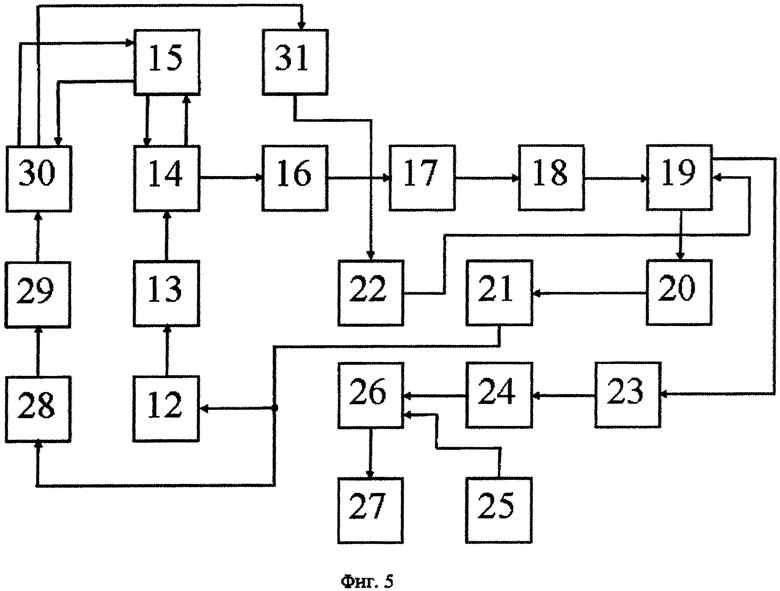
Способ распознавания материалов акустических целей, основанный на облучении цели зондирующими импульсами, приеме отраженных сигналов и обработке отраженных сигналов, отличающийся тем, что определяют возможные резонансные области частот колебаний облучаемой цели, например, расчетным путем на основе известных размеров цели с заданной погрешностью или излучением зондирующего импульса с высоким разрешением по дальности расположения отражающих элементов цели в направлении облучения и измерением времен и углов прихода отраженных импульсов, излучают широкополосные зондирующие импульсы, соответствующие по ширине полосы частот одной или нескольким определенным резонансным областям частот колебаний облучаемой цели, принимают отраженный сигнал, определяют спектр этого сигнала, в спектре выделяют существенные локальные максимумы и измеряют их амплитуду и ширину резонансной области частот по уровню 0,707 от максимальной амплитуды в каждой резонансной области спектра отраженного сигнала, вычисляют добротности в резонансных областях частот путем отношения максимальной амплитуды в резонансной области спектра сигнала к измеренной ширине полосы частотной области и распознают материал акустической цели по выделенным добротностям на основе решающего правила, сформулированного в результате анализа статических характеристик изменения добротностей известных материалов, например, на основе критерия Байеса.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006877C1 |
| АКУСТИЧЕСКИЙ ИМПУЛЬСНЫЙ ЛОКАТОР | 1993 |
|
RU2050558C1 |
| E.Kozaczka et al | |||
| Detection of objects buried in the sea bottom with the use of parametric echosounder | |||
| Archive of acoustics | |||
| PAN, Vol | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| ЭХОЛОТ | 2003 |
|
RU2241242C1 |
| RU83344 U1, 27.05.2009. | |||

