Изобретение относится к гидроакустическим системам определения глубины, и может быть использовано в эхолотах с автоматическим адаптивным обнаружением эхо-сигналов от дна и измерением глубины.
В известном эхолоте [Л1], содержащем синхронизатор, генератор импульсов, пьезовибратор, усилитель, детектор, пороговое устройство, блок индикации, устройство измерения временных интервалов, блок автоматической регулировки усиления (ВАРУ), блок ВАРУ позволяет стационаризировать амплитуду эхо-сигналов, изменяющуюся с глубиной. Однако уровень излучаемой мощности является постоянным и не зависит от глубины, поэтому соотношение сигнал/помеха на входе решающего устройства - порогового устройства - будет уменьшаться с увеличением глубины вследствие увеличения уровня гидроакустических помех, так как коэффициент усиления приемника под действием ВАРУ увеличивается с глубиной, что приведет к уменьшению точности измерения глубины. Использование неадаптивного порогового устройства в условиях изменяющегося уровня шумов затрудняет правильное обнаружение эхо-сигналов от дна.
Наиболее близким по совокупности признаков к предлагаемому эхолоту является "Акустическая система измерения расстояния", описанная в патенте [Л2], которая содержит микропроцессор, память, ряд интерфейсов, цифроаналоговый преобразователь, дисплей, передатчик, приемник, аналого-цифровой преобразователь, электроакустический преобразователь.
В этой "Акустической системе измерения расстояния" периодически излучается постоянная мощность передатчиком, приемник выполнен логарифмическим, то есть его коэффициент усиления по логарифмическому закону зависит от амплитуды входного сигнала. Выходной сигнал с приемника оцифровывается аналого-цифровым преобразователем, и поступает на обработку в микропроцессор с целью обнаружения эхо-сигнала от дна и измерения расстояния до него, причем используется адаптивный порог обнаружения, уровень которого зависит как от амплитуды сигнала, так и от уровня шумов, что позволяет уверенно обнаруживать эхо-сигналы от дна на фоне помехи ложных сигналов.
Однако излучение постоянной мощности и логарифмическая зависимость коэффициента усиления не позволяют полностью скомпенсировать уменьшение амплитуды эхо-сигналов с увеличением глубины, то есть не позволяют добиться оптимального, с точки зрения погрешности измерения, соотношения сигнал/помеха для каждой конкретной глубины и коэффициента обратного рассеяния от границы раздела двух сред, а это не позволяет минимизировать погрешность измерения глубины, обусловленную изменяющимся уровнем гидроакустических шумов [Л4, стр.80, 81].
В "Акустической системе измерения расстояния" за время прихода сигнала принимается точка в эхо-сигнале от дна, где его амплитуда равна адаптивному порогу без учета крутизны переднего фронта и абсолютной амплитуды эхо-сигнала от дна, а это приводит к дополнительной погрешности измерения глубины [Л4, стр.80, 81].
Задачей изобретения является повышение точности измерения за счет снижения погрешностей, обусловленных шумами и конечным значением крутизны фронта эхо-сигнала.
Для решения поставленной задачи в эхолот, содержащий последовательно соединенные микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к микроконтроллеру, в него введены новые признаки, а именно: блок временной автоматической регулировки усиления, вход которого соединен с микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления, подключен к микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления.
Сущность предлагаемого изобретения представлена на фиг.1, где:
1 - микроконтроллер (МК);
2 – передатчик;
3 – приемник;
4 - аналого-цифровой преобразователь (АЦП);
5 - электроакустический преобразователь (ЭАП);
6 – дисплей;
7 - блок временной автоматической регулировки усиления (ВАРУ);
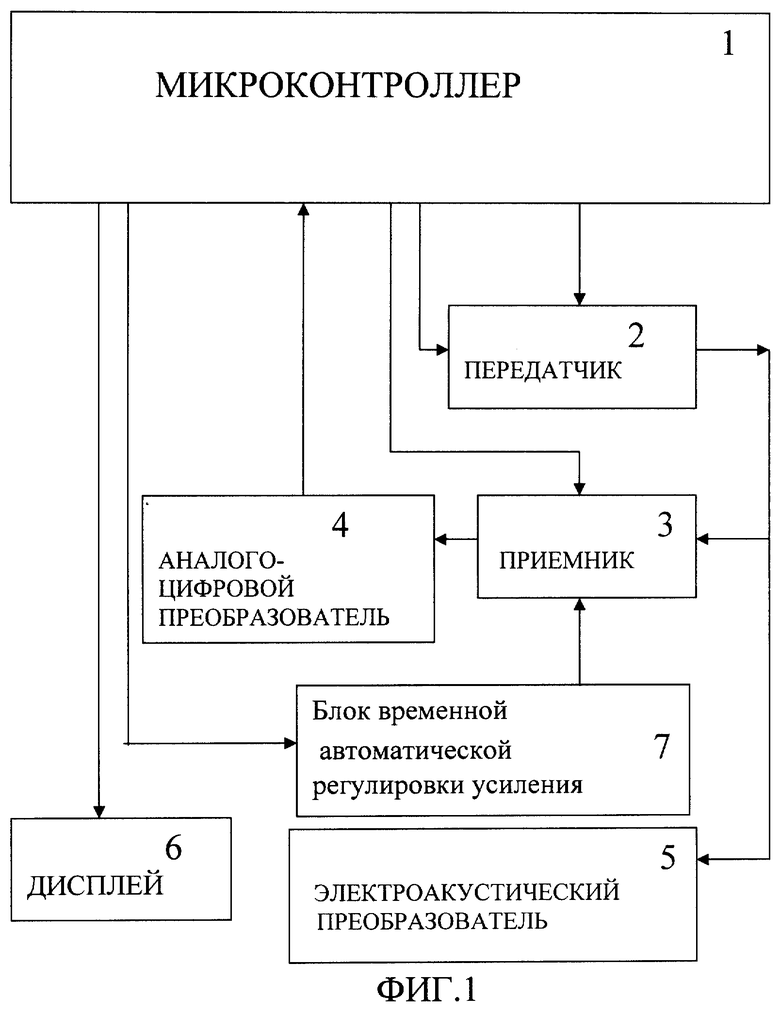
Фиг.2 представляет собой иллюстрацию работы эхолота.
Известно [Л4, стр. 81], что при измерении глубины точность измерения зависит от погрешностей, обусловленных шумами и конечным значением крутизны переднего фронта эхо-сигнала.
Уменьшить влияние этих погрешностей можно путем введения ВАРУ, которая автоматически компенсирует уменьшение амплитуды эхо-сигнала с увеличением глубины посредством пропорционального увеличения коэффициента усиления приемника, а также удержанием амплитуды эхо-сигнала в диапазоне, обеспечивающее максимальное соотношение сигнал/помеха для конкретной глубины путем ступенчатого излучения мощности и выбора минимально необходимого коэффициента усиления приемника, а также путем автоматического определения начала эхо-сигнала от дна.
Известно, что при распространении сигналов в дисперсионных средах затухание высокочастотных составляющих спектра сигнала приводит к его заметному уширению, то есть к искажению формы эхо-сигнала и затягиванию его фронтов.
Согласно [Л3, стр. 240], следует, что в качестве реперной точки для отсчета времени прихода эхо-сигнала следует выбирать момент первого появления эхо-сигнала, а на момент времени, где амплитуда достигает максимального значения или же проходит через нулевую отметку.
Предлагаемый эхолот работает следующим образом.
В начальный момент времени, то есть в момент запуска работы программного обеспечения, МК устанавливает среднее значение коэффициента усиления в приемнике по первому входу регулировки усиления и среднее значение излучаемой мощности в передатчике по входу регулировки мощности. Отметим, что минимальное значение мощности излучения должно обеспечивать измерение малых глубин, а максимальное значение - предельных глубин. Также минимальное значение коэффициента усиления, устанавливаемое по первому входу регулировки усиления с учетом коэффициента усиления по второму входу регулировки, определяемое блоком ВАРУ, должно обеспечивать измерение минимальных глубин, а максимальное значение - предельных глубин для эхолота. Затем МК запускает блок ВАРУ синхронно с излучением зондирующего импульса передатчиком через ЭАП в среду. Блок ВАРУ пропорционально уменьшению амплитуды эхо-сигнала, вследствие пространственного затухания, увеличивает коэффициент усиления приемника по второму входу регулировки усиления приемника, тем самым стационаризируется уровень эхо-сигнала в пределах действия динамического диапазона ВАРУ [Л5, стр. 141].
Принятый эхо-сигнал со сжатым под действием ВАРУ динамическим диапазоном с выхода приемника оцифровывается АЦП и вводится в МК в виде массива последовательных отсчетов. В МК этот исходный массив отсчетов обрабатывается согласно алгоритму, описанному в патенте [Л2], и из него выделяется ряд отсчетов, составляющих эхо-сигнал от дна. Затем МК определяет из этого ряда отсчет, соответствующий максимальной амплитуде эхо-сигнала Am (см. фиг.2), и сравнивает его с двумя величинами ан и Ав.
Значение напряжения амплитудой Ан выбирают из условия минимально допустимого значения соотношения сигнал/помеха и уровня акустического шума на входе приемника.
Ан≥ q· Pn· ν · Кус.мах
где q - минимально допустимое соотношение сигнал/помеха;
Рn - давление помехи на входе приемника;
ν - чувствительность ЭАП по давлению;
Кус.мах - максимальный коэффициент усиления приемника с учетом действия ВАРУ.
Значение напряжения амплитудой Ав выбирается из условий неограничения амплитуды эхо-сигнала в выходном каскаде приемника и Ав&γτ; Ан.
Отношение между двумя соседними уровнями излучаемой мощности Δ р должно удовлетворять условию

Отношение между двумя соседними ступенями коэффициента усиления Δ у по первому входу регулировки усиления приемника должно удовлетворять условию

Эти условия выбора величин Δ р и Δ у обеспечивают безусловное выполнение условия Ан&λτ; Аm≤ Ав.
Далее, если Аm&λτ; Ан, то МК в последующих циклах излучение-прием вначале увеличивает мощность излучения до максимальной, а только затем коэффициент усиления приемника (чтобы не увеличивать уровень шума на выходе приемника), до тех пор, пока не будет выполняться условие Ан&λτ; Ат≤ Ав.
Если же Аm&γτ; Ав, то в последующих циклах излучение-прием МК вначале уменьшает коэффициент усиления приемника по первому входу регулировки до минимального, а только затем излучаемую мощность передатчика до выполнения условия Ан&λτ; Аm≤ Ав.
Отметим, что в каждом цикле излучение-прием МК производит обнаружение эхо-сигнала от дна по алгоритму, описанному в патенте [Л2], а выбор ступеней излучаемой мощности и значений коэффициента усиления для уменьшения времени выполнения условия Ан&λτ; Аm≤ Ав, например, можно вычислять методом наискорейшего спуска, либо по какому-нибудь другому алгоритму.
Далее, если в цикле излучение-прием выполняется условие Ан&λτ; Аm≤ Ав, то МК запускает алгоритм определения начала эхо-сигнала от дна, то есть определение соответствующего отсчета An из исходного массива отсчетов согласно алгоритму
Аn=Ai, если Ai≤K1·Ai-1 и Ai&λτ;K2·Ai+1, m≥ i≥ 1
где i - номер отсчета;
Ai - амплитуда i-гo отсчета;
К - коэффициент, K1≥1, K2≥1 обеспечивают обнаружение начала эхо-сигнала в присутствии шумов;
m - номер отсчета, соответствующий максимальной амплитуде в эхо-сигнале от дна.
То есть МК осуществляет перебор отсчетов, начиная с номера m, в сторону уменьшения номера отсчета до нахождения точки перегиба эхо-сигнала (см.фиг.2), то есть отсчета с номером n.
Согласно утверждению [Л2] и учитывая, что ЭАП является электромеханическим преобразователем с конечной добротностью Q, и давление зондирующего сигнала, создаваемое им, достигает максимума примерно за Q периодов частоты, на которой он работает, то за время прихода эхо-сигнала следует выбирать именно точку перегиба переднего фронта эхо-сигнала от дна.
Далее МК вычисляет глубину Н от дна по формуле
Н=(tАЦП· n)· Cзв/2,
где tАЦП - время преобразования АЦП;
Сзв - скорость звука в среде;
n - номер отсчета АЦП, соответствующий началу эхо-сигнала от дна
и выводит числовое значение глубины на дисплей.
Затем начинается новый цикл излучение-прием, в котором описанные процедуры обнаружения эхо-сигнала от дна, установления его амплитуды, определения его начала, вычисления глубины и вывод ее на дисплей повторяются.
Таким образом, изменяя излучаемую мощность передатчика и коэффициент усиления приемника, МК удерживает амплитуду эхо-сигнала от дна в диапазоне амплитуд напряжения от Ан до Ав, тем самым обеспечивает соотношение сигнал/помеха не ниже минимально допустимого уровня и снижает погрешность измерения глубины, обусловленную шумами, а также определяет алгоритмически начало эхо-сигнала от дна и тем самым снижает погрешность измерения глубины, обусловленную конечным значением крутизны переднего фронта эхо-сигнала от дна.
Для практического выполнения эхолота в качестве микроконтроллера может быть применен микроконтроллер SBC 8360 фирмы "AXIOM" -одноплатный компьютер формата 3.5 дюйма промышленного исполнения на процессоре Celeron-1,1 ГГц фирмы Intel с набором интерфейсов и встроенным электронным Flash-диском для хранения программного обеспечения эхолота.
В качестве передатчика может быть использован импульсный усилитель, собранный по мостовой схеме, причем путем изменения напряжения питания мостового выходного каскада можно изменять излучаемую мощность передатчика от 1 Вт до 200 Вт ступенями через 6 дБ; изменением напряжения питания выходного каскада должен управлять МК 4-разрядным параллельным кодом.
В качестве приемника может применяться усилитель на основе ИМС AD600 - усилителя с коэффициентом усиления, изменяемым напряжением, в диапазоне от 0 до 80 дБ, что должен обеспечивать блок ВАРУ, и ИМС AD7945 - перемножающем цифроаналоговом преобразователе, который может изменять ступенчато коэффициент усиления приемника от 0 до 48 дБ через 3 дБ под действием 8-разрядного кода поступающего от МК.
В качестве дисплея может использоваться ЖКИ-монитор с VGA интерфейсом.
В качестве АЦП может использоваться ИМС AD7892-2 - 12-разрядное полное АЦП с параллельным интерфейсом и быстродействием 1,6 мкс.
ВАРУ может быть реализована на основе счетчика, синхронизацию которого должен осуществлять МК, перебирающего последовательно адреса ПЗУ, в котором записан закон ВАРУ; выходы ПЗУ должны быть соединены с цифроаналоговым преобразователем, который, собственно, и формирует изменяющееся во времени напряжение ВАРУ от 0 до 2,5 В, управляющее коэффициентом усиления приемника.
Применение адаптивного порога обнаружения позволяет уверенно обнаруживать эхо-сигнал от дна в условиях качки и шумов на корабле, обусловленных вращением винтов и работой его механизмов.
Предлагаемый эхолот полностью автоматический и не требует участия оператора в работе. Достоинством описанного эхолота является также возможность записи в электронном виде информации об измеренных глубинах в координатах глубина - пройденный путь для последующего точного воспроизведения на дисплее для анализа в любом масштабе времени.
Повышенная точность измерения глубины и автоматический режим работы в сочетании с возможностью привязки измеренных глубин к географическим координатам и времени, получаемым от приемника системы GPS, позволяют использовать его в качестве промерного эхолота.
Литература
1. Эхолот. Патент 2123191 RU от 1998.12.10, GO 1 S 15/00, заявка № 97111517/09 от 1997.07.02.
2. Акустическая система измерения расстояния. Европейский патент А2 0340953, G 01 S 7/52, G 01 S 15/88.
3. Применение ультразвука в медицине./Под редакцией К. Хилла, М.: Мир, 1989 г., стр. 240 (перечисление 5.2.2.2).
4. Хребтов А.А. и др. Судовые эхолоты. Л.: Судостроение, 1982 г., стр. 80, 81.
5. Кобяков Ю.С и др. Конструирование гидроакустической рыбопоисковой аппаратуры. Л.: Судостроение, 1986 г., стр. 141.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эхолот | 2022 |
|
RU2789812C1 |
| ЭХОЛОТ С ЛЕДОВОЙ ЗАЩИТОЙ | 2013 |
|
RU2523104C1 |
| Эхолот | 2023 |
|
RU2828233C1 |
| ЭХОЛОТ | 2009 |
|
RU2390796C1 |
| Эхолот | 2019 |
|
RU2719210C1 |
| ЭХОЛОТ | 2012 |
|
RU2523101C2 |
| ЭХОЛОТ ДЛЯ РАСПОЗНАВАНИЯ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2007 |
|
RU2348054C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2004 |
|
RU2292529C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| Малоразмерный ультразвуковой измеритель расстояния | 2019 |
|
RU2720640C1 |
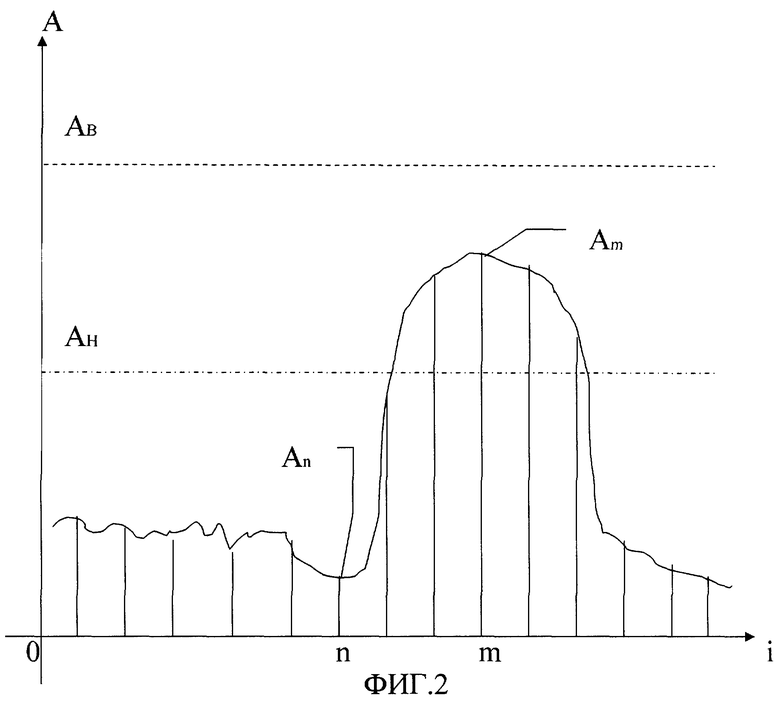
Изобретение относится к гидроакустическим системам определения глубины и может быть использовано в эхолотах с автоматическим адаптивным обнаружителем эхо-сигналов от дна и измерением глубины. Технический результат заключается в повышении точности измерения глубины. Эхолот содержит последовательно соединенные микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к микроконтроллеру, и блок временной автоматической регулировки усиления, вход которого соединен с микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления подключен к микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления. 2 ил.
Эхолот, содержащий последовательно соединенные микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к микроконтроллеру, отличающийся тем, что в него введен блок временной автоматической регулировки усиления, вход которого соединен с микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления подключен к микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления.
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВРЕМЕНИ ЯДЕРНОЙ МАГНИТНОЙ РЕЛАКСАЦИИ | 0 |
|
SU340953A1 |
| ЭХОЛОТ | 1997 |
|
RU2123191C1 |
| US 4420824, 13.12.1983 | |||
| US 3944965, 16.03.1976 | |||
| ПРОСТАКОВ А.Л | |||
| Электронный ключ к океану | |||
| - Л.: Судостроение, 1986, с.7-11 | |||
| ЯКОВЛЕВ А.Н., КАБЛОВ Г.П | |||
| Гидролокаторы ближнего действия | |||
| - Л.: Судостроение, 1983, с.167-169. | |||

