Изобретение относится к устройствам, предназначенным для проведения исследовательских работ, связанных с обогащением полезных ископаемых методом пенной флотации, и может быть использовано для исследования на обогатимость различных типов руд, а также самих процессов флотации в лабораторных условиях.
Из предшествующего уровня техники известны изобретения, реализующие возможность проведения флотационных экспериментов над пробами руд для их испытания на обогатимость.
Известна лабораторная флотационная машина, содержащая станину, аэрационный блок, состоящий из импеллера, выполненного в виде полого усеченного конуса с лопатками, и полого вала со стаканом, размещенным между подшипниками, камеру с отбойником и пеногоном, привод вала импеллера и приспособление для определения и регулирования расхода воздуха, установленного в стакане. В отбойнике выполнены отверстия для установки датчиков параметров процесса. Приспособление для регулирования расхода воздуха выполнено из подшипника с установленной в нем иглой и регулировочного винта со стопорной гайкой (SU. а.с. №1103903, кл. B013D 1/14, 1983 г.).
Данная машина обладает рядом существенных недостатков, таких как отсутствие возможности регулирования скорости вращения импеллера и скорости пеносьема. Также к недостаткам данной модели следует отнести и отсутствие привода подъема съемной камеры и, как следствие, необходимость фиксировать камеру с продуктом в рабочем положении вручную.
Наиболее близкой по технической сущности и достигаемому результату является лабораторная флотационная машина, содержащая корпус, съемную камеру с приводом подъема, подвижную платформу, аэрационный узел, состоящий из импеллера, вала импеллера и статора, серводвигатель привода вала импеллера, редуктор, блок управления серводвигателем (флотационная машина, производимая компанией ТВЭЛЛ (http://www.twellgroup.ru/floto_lab.html).
Достоинствами флотомашины являются возможность регулирования таких параметров процесса, как скорость вращения вала импеллера, скорость пеногона и величины расхода воздуха, подаваемого в аэрационный узел. Кроме того, флотомашина оснащена приводом подъема съемной камеры, а также встроенным электронным устройством управления, позволяющим задавать режимные параметры.
Недостатками известной лабораторной флотационной машины являются: отсутствие системы автоматической подачи флотореагентов, отсутствие встроенного автономного источника сжатого воздуха, что приводит к необходимости подвода сжатого воздуха от удаленных источников, регулирование расхода воздуха в камеру флотомашины производится путем изменения степени открытия ручного вентиля по показаниям поплавкового ротаметра, регулирование уровня пульпы в камере флотомашины осуществляется за счет разбавления находящегося в ней продукта водой для компенсации количества снимаемого во время флотации материала, что приводит к изменению условий эксперимента. Кроме того, отсутствует возможность автоматического сбора информации для обработки результатов экспериментов.
Технический результат, на достижение которого направлено настоящее изобретение, заключается в расширении функциональных возможностей лабораторной флотомашины, повышении степени автоматизации ее работы и улучшении качества проведения экспериментов.
Указанный технический результат достигается тем, что лабораторная флотационная машина, содержащая корпус, съемную камеру, подвижную платформу с приводом подъема, аэрационный узел, состоящий из импеллера, вала импеллера и статора, серводвигатель привода вала импеллера, редуктор, блок управления серводвигателем, согласно изобретению, дополнительно содержит программируемый логический контроллер, сенсорную панель оператора, маршрутизатор беспроводной сети, микрокомпрессор сжатого воздуха, датчик расхода сжатого воздуха в аэрационный узел, клапан регулирования расхода сжатого воздуха в аэрационный узел, не менее двух микронасосов дозирования флотореагентов, устройство регулирования уровня пульпы во флотомашине, включающее вытеснительный конус с приводным механизмом, обсадную трубу, датчик уровня пульпы и воздушную форсунку подачи сжатого воздуха на обдув датчика уровня пульпы, при этом выходы датчиков расхода сжатого воздуха и уровня пульпы связаны с соответствующими входами программируемого логического контроллера, а выходы программируемого логического контроллера связаны с информационным входом сенсорной операторской панели и управляющими входами блока управления серводвигателя привода вала импеллера, микрокомпрессора сжатого воздуха, микронасосов дозирования флотореагентов, клапана регулирования расхода сжатого воздуха в аэрационный узел, приводного механизма вытеснительного конуса и привода подъема съемной камеры, кроме того, вход маршрутизатора беспроводной связи связан с интерфейсными выходами программируемого контроллера и сенсорной операторской панели.
Кроме того, указанный технический результат достигается тем, что съемная камера может быть выполнена в виде сосуда в форме прямой восьмигранной призмы.
А так же тем, что съемная камера так же может быть выполнена в виде цилиндра, в виде усеченного конуса или в виде прямоугольного параллелепипеда.
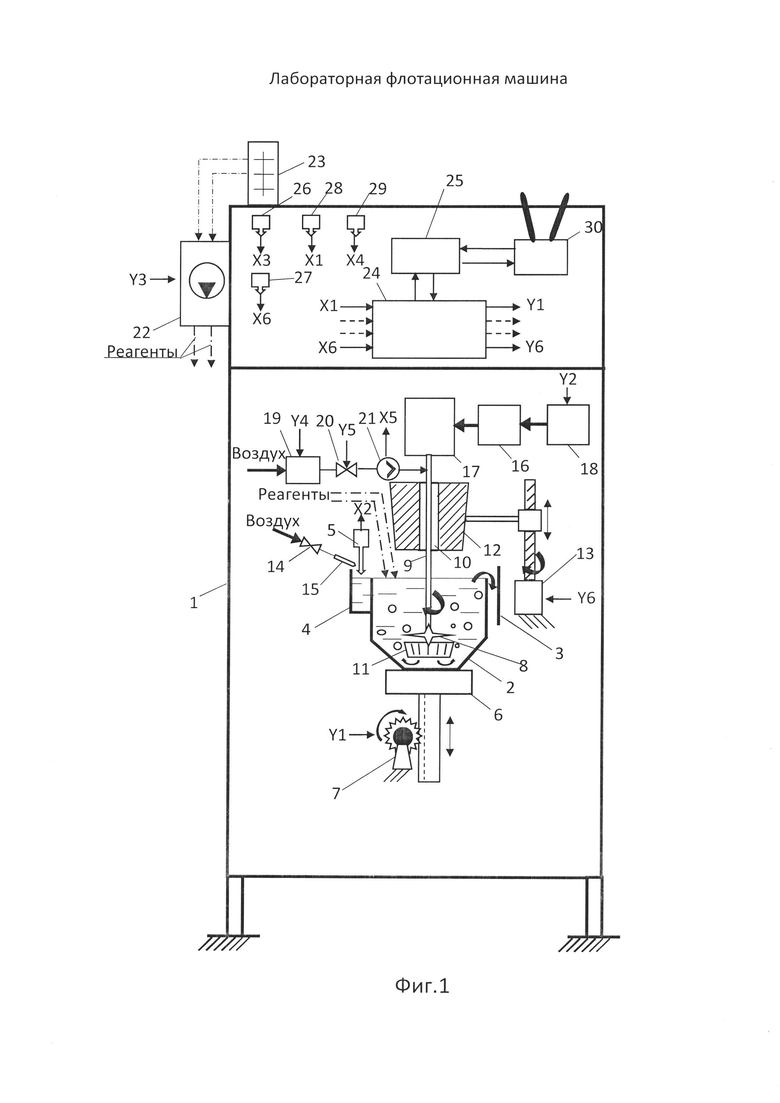
На фиг. 1 изображена схема лабораторной флотационной машины.
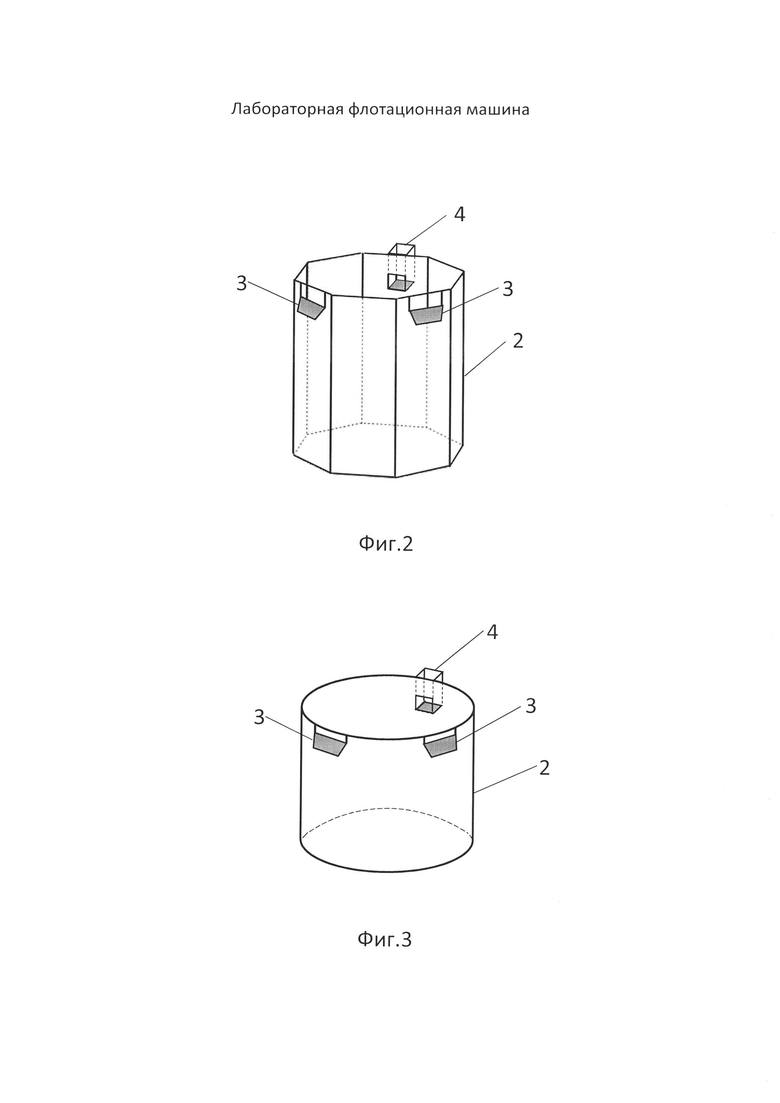
На фиг. 2 изображено выполнение съемной камеры в виде сосуда в форме прямой восьмигранной призмы.
На фиг. 3 изображено выполнение съемной камеры в виде сосуда в форме цилиндра.
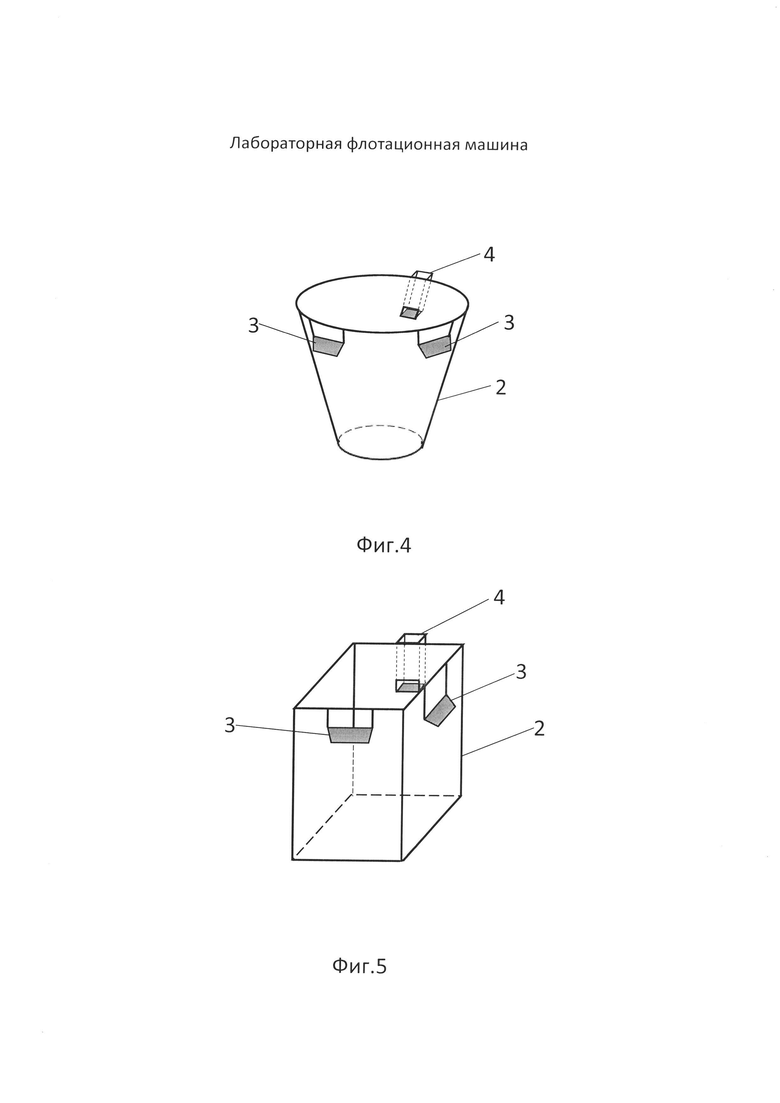
На фиг. 4 изображено выполнение съемной камеры в виде сосуда в форме усеченного конуса.
На фиг. 5 изображено выполнение съемной камеры в виде сосуда в форме прямоугольного параллелепипеда
Лабораторная флотационная машина содержит корпус флотомашины 1, съемную камеру 2, с рукавами 3 для отвода пены и карманом 4 для размещения датчика 5 уровня пульпы в съемной камере 2, подвижную платформу 6 с приводом 7 подъема, аэрационный узел, состоящий из импеллера 8, закрепленного на полом приводном вале 9, проходящем через обсадную трубу 10, и статора 11, закрепленного на дне съемной камеры 2, вытеснительный конус 12 с приводом 13 подъема, ручной вентиль 14 и форсунку 15 для подачи сжатого воздуха на обдув датчика 5 уровня пульпы в съемной камере 2, серводвигатель 16 с редуктором 17 вращения приводного вала 9 импеллера 8, блок 18 управления серводвигателем 16, микрокомпрессор 19 сжатого воздуха, клапан 20 регулирования и датчик 21 контроля расхода сжатого воздуха через полый приводной вал 9 в съемную камеру 2, микронасосы 22 дозирования флотореагентов в съемную камеру 2, емкости 23 для хранения флотореагентов, программируемый логический контроллер 24, сенсорную панель 25 оператора, кнопку-индикатор 26 «Пуск/Стоп Импеллер», кнопку-индикатор 27 «Воздух», кнопку-индикатор 28 «Вверх/Вниз Камера», кнопку-индикатор 29 «Вверх/Вниз Вытеснитель» и маршрутизатор 30 беспроводной сети.
Съемная камера 2 может быть выполнена в виде сосуда в форме прямой восьмигранной призмы, что уменьшает трудоемкость ее изготовления, например, из органического стекла.
Съемная камера 2 также может быть выполнена в виде сосуда в форме цилиндра, что позволяет получить более адекватные результаты при переносе разработанных в результате исследований технологий на промышленные флотомашины с цилиндрической формой камеры.
Съемная камера 2 может быть выполнена в виде сосуда в форме усеченного конуса, что позволяет повысить эффективность флотации за счет более концентрированного насыщения воздухом пенного слоя флотомашины при сопоставимом по отношению к другим формам съемной камеры объеме исследуемой пробы.
Съемная камера 2 так же может быть выполнена в виде сосуда в форме прямоугольного параллелепипеда, что позволяет получить более адекватные результаты при переносе разработанных в результате исследований технологий на промышленные флотомашины с прямоугольной формой камеры.
Лабораторная флотационная машина работает следующим образом.
В исходном состоянии подвижная платформа 6 с установленной на ней съемной камерой 2 находится в крайнем нижнем положении для удобства заполнения ее исследуемой пробой пульпы. Вытеснительный конус 12 поднят. Микрокомпрессор 19 сжатого воздуха отключен, серводвигатель 16 остановлен, ручной вентиль 14 и клапан 20 регулирования сжатого воздуха закрыт.Напряжение питания программируемого логического контроллера 24, блока 18 управления серводвигателем 16 и микронасосов 22 дозирования флотореагентов отключено.
Дальнейшая работа флотомашины осуществляется в следующей последовательности.
1. Подают напряжение питания программируемого логического контроллера 24, блока 18 управления серводвигателем 16 и микронасосов 22 дозирования флотореагентов.
2. Съемную камеру 2 заполняют исследуемым материалом до требуемого объема.
3. Нажимают кнопку-индикатор 28 «Вверх/Вниз Камера», команда XI от которой поступает на вход программируемого контроллера 24, вследствие чего последний выдает команду Y1 на включение привода 7 подъема подвижной платформы 6 с установленной на ней съемной камерой 2. Подъем съемной камеры 2 осуществляют до достижения ей рабочего положения, определяемого уровнем установки датчиком 5 уровня пульпы. В момент касания пульпы чувствительным элементом датчика 5 уровня вырабатывается сигнал Х2, в соответствии с которым программируемый контроллер 24 выдает команду Y1 на останов механизма 7 подъема подвижной платформы 6.
4. На сенсорной панели 25 оператора задают требуемые для проведения исследования значения скорости вращения полого приводного вала 9 импеллера 8, расхода сжатого воздуха через полый приводной вал 9 в съемную камеру 2, режим вытеснения, объем доз флотореагентов, подаваемых микронасосами 22 и временные циклы режимов работы флотомашины - «Агитация» и «Флотация».
5. На первом этапе работы флотомашины в режиме «Агитация» нажимают кнопку-индикатор 26 «Пуск/Стоп Импеллер», по команде Х3 от которой программируемый контроллер 24 вырабатывает команду Y2, соответствующую заданной скорости вращения полого приводного вала 9 импеллера 8, поступающую на блок 18 управления серводвигателем 16. Серводвигатель 16 начинает свое вращение с заданной скоростью и через редуктор 17 приводит в движение вал 9 импеллера 8. Исследуемый материал в съемной камере 2 начинает перемешиваться. Одновременно с выхода программируемого контроллера 24 на управляющие входы микронасосов 22 поступает команда Y3 на их включение и реагенты из емкости 23 для хранения флотореагентов начинают поступать в съемную камеру 2. Длительность включения микронасосов 22, вычисляется программируемым контроллером 24 в зависимости от требуемого объема доз подаваемых флотореагентов, заданных ранее на сенсорной панели 25 оператора.
6. По истечении заданного времени реализации режима «Агитация», либо по нажатию на кнопку-индикатор 27 «Воздух», команда Х6 от которой поступает на вход программируемого контроллера 24, последний переводит работу флотомашины в режим «Флотация» путем подачи команды Y4 на включение микрокомпрессора 19. Сжатый воздух через клапан 20 регулирования, датчик 21 контроля расхода, полый приводной вал 9, обсадную трубу 10 поступает в аэрационный узел. Регулирование расхода Х5 сжатого воздуха осуществляется путем изменения степени открытия клапана 20 по команде Y5, формируемой в программируемом контроллере 24 в соответствии со значением, заданным на сенсорной панели 25 оператора. Подаваемый сжатый воздух благодаря вращающемуся импеллеру 8 и неподвижному статору 11 диспергируется в объеме исследуемого материала, находящегося в съемной камере 2 флотомашины. Степень диспергации задается скоростью вращения серводвигателя 16 путем формирования программируемым контроллером 24 управляющей команды Y2, соответствующей скорости вращения, заданной на сенсорной панели 25 оператора. Поступление сжатого воздуха в съемную камеру 2 инициирует начало процесса флотации. Образующийся в процессе флотации пенный продукт по рукавам 3 самотеком отводится за пределы съемной камеры 2 для дальнейшей обработки. Компенсация с целью стабилизации условий протекания процесса флотации уменьшения уровня заполнения материалом съемной камеры 2 вследствие вывода пенного продукта обеспечивается погружением в пульпу вытеснительного конуса 12. Управление погружением вытеснительного конуса 12 осуществляется в двух режимах, задаваемых с сенсорной панели 25 оператора - ручном и автоматическом. В ручном режиме нажимают кнопку-индикатор 29 «Вверх/Вниз Вытеснитель» и удерживают ее до погружения вытеснительного конуса 12 в исследуемый материал на необходимую глубину. В автоматическом режиме в случае понижения уровня пульпы в съемной камере 2 ниже заданного значения так же нажимают кнопку-индикатор 29 «Вверх/Вниз Вытеснитель». Генерируемый вследствие этого сигнал Х4 поступает на вход программируемого контроллера 24, который в свою очередь посылает команду Y6 соответствующей полярности на управляющий вход механизма 13 подъема вытеснительного конуса 12. Вытеснительный конус 12 начнет движение вниз вдоль обсадной трубы 10. Вследствие погружения вытеснительного конуса 12 в пульпу, уровень последней будет повышаться до момента касания чувствительного элемента датчика 5. В момент касания датчиком 5 уровня вырабатывается сигнал Х2, в соответствии с которым программируемый контроллер 24 выдает команду Y6 на останов механизма 13 подъема вытеснительного конуса 12. В дальнейшем при уменьшении уровня пульпы вследствие вывода пенного продукта контакт между чувствительным элементом датчика 5 уровня и пульпой нарушается, датчиком 5 формируется соответствующий сигнал Х2, в соответствии с которым программируемый контроллер 24 выдает команду Y6 на продолжение движения вытеснительного конуса 12 вниз и далее процедура стабилизации уровня пульпы повторяется аналогично описанному выше.
С целью избежания ложного срабатывания датчика уровня 5 вследствие загрязнения его чувствительный элемент в процессе всего эксперимента обдувается сжатым воздухом, подводимым через ручной вентиль 14 и форсунку 15.
Команды управления Х1, Х3, Х4, Х6, инициируемые кнопками-индикаторами 26-29, могут дублироваться на входе в программируемый контроллер 24 командами с внешнего компьютера через маршрутизатор беспроводной сети 30.
После выхода заданного времени цикла флотации программируемым контроллером 24 выдаются команды Y4 на останов работы микрокомпрессора 19, Y2 на останов серводвигателя 16, Y6 на подъем вытеснительного конуса 12 и Y1 на опускание подъема подвижной платформы 6. На этом работа флотомашины заканчивается.
Во время проведения исследований все режимные параметры флотомашины архивируются. Запись данных может осуществляться на внутреннюю память сенсорной панели 25 оператора. Кроме того, через маршрутизатор беспроводной сети 30 данные могут передаваться для архивации и обработки на внешнем компьютере.
Таким образом, предложенная лабораторная флотационная машина обладает расширенными функциональными возможностями благодаря автоматизации функций ее контроля и управления, включая возможность архивации и обработки данных на внешнем компьютере, а также повышению качества проведения экспериментов за счет стабилизации уровня пульпы без изменения характеристик исследуемого материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Флотационная машина | 1991 |
|
SU1792347A3 |
| Универсальная лабораторная флотационная машина и статор флотационной машины | 2023 |
|
RU2800981C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 1996 |
|
RU2129049C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 1995 |
|
RU2086309C1 |
| Аэрационный узел для флотационной машины | 1981 |
|
SU973170A1 |
| Флотационная машина пневмомеханического типа | 1976 |
|
SU865405A1 |
| ФЛОТАЦИОННАЯ МАШИНА | 2010 |
|
RU2457037C2 |
| ФЛОТАЦИОННАЯ МАШИНА | 1992 |
|
RU2061554C1 |
| АЭРАЦИОННЫЙ УЗЕЛ ФЛОТАЦИОННОЙ МАШИНЫ | 2001 |
|
RU2187380C1 |
| Аэрационный блок флотационной машины | 1990 |
|
SU1788916A3 |
Изобретение относится к устройствам, предназначенным для проведения исследовательских работ, связанных с обогащением полезных ископаемых методом пенной флотации, и может быть использовано для исследования на обогатимость различных типов руд, а также самих процессов флотации в лабораторных условиях. Лабораторная флотационная машина содержит корпус, съемную камеру с приводом подъема, подвижную платформу, аэрационный узел, состоящий из импеллера, вала импеллера и статора, серводвигатель привода вала импеллера, редуктор, блок управления серводвигателем. Машина дополнительно содержит программируемый логический контроллер, сенсорную панель оператора, маршрутизатор беспроводной сети, микрокомпрессор сжатого воздуха, датчик расхода сжатого воздуха в аэрационный узел, клапан регулирования расхода сжатого воздуха в аэрациолнный узел, не менее двух микронасосов дозирования флотореагентов, устройство регулирования уровня пульпы во флотомашине, включающее вытеснительный конус с приводным механизмом, обсадную трубу, датчик уровня пульпы и воздушную форсунку подачи сжатого воздуха на обдув датчика уровня пульпы. Выходы датчиков расхода сжатого воздуха и уровня пульпы связаны с соответствующими входами программируемого логического контроллера. Выходы программируемого логического контроллера связаны с информационным входом сенсорной операторской панели и управляющими входами блока управления серводвигателя привода вала импеллера, микрокомпрессора сжатого воздуха, микронасосов дозирования флотореагентов, клапана регулирования расхода сжатого воздуха в аэрационный узел, приводного механизма вытеснительного конуса и привода подъема съемной камеры. Вход маршрутизатора беспроводной связи связан с интерфейсными выходами программируемого контроллера и сенсорной операторской панели. Съемная камера выполнена в виде сосуда в форме прямой восьмигранной призмы, содержащего не менее двух рукавов для отвода пены и карман для размещения датчика уровня пульпы во флотационной машине. Съемная камера выполнена или в виде цилиндра, или в виде усеченного конуса, или в виде прямоугольного параллепипеда. Технический результат - улучшение качества проведения экспериментов, а также повышение степени автоматизации работы машины. 4 з.п. ф-лы, 5 ил.
1. Лабораторная флотационная машина, содержащая корпус, съемную камеру с приводом подъема, подвижную платформу, аэрационный узел, состоящий из импеллера, вала импеллера и статора, серводвигатель привода вала импеллера, редуктор, блок управления серводвигателем, отличающаяся тем, что она дополнительно содержит программируемый логический контроллер, сенсорную панель оператора, маршрутизатор беспроводной сети, микрокомпрессор сжатого воздуха, датчик расхода сжатого воздуха в аэрационный узел, клапан регулирования расхода сжатого воздуха в аэрационный узел, не менее двух микронасосов дозирования флотореагентов, устройство регулирования уровня пульпы во флотомашине, включающее вытеснительный конус с приводным механизмом, обсадную трубу, датчик уровня пульпы и воздушную форсунку подачи сжатого воздуха на обдув датчика уровня пульпы, при этом выходы датчиков расхода сжатого воздуха и уровня пульпы связаны с соответствующими входами программируемого логического контроллера, а выходы программируемого логического контроллера связаны с информационным входом сенсорной операторской панели и управляющими входами блока управления серводвигателя привода вала импеллера, микрокомпрессора сжатого воздуха, микронасосов дозирования флотореагентов, клапана регулирования расхода сжатого воздуха в аэрационный узел, приводного механизма вытеснительного конуса и привода подъема съемной камеры, кроме того, вход маршрутизатора беспроводной связи связан с интерфейсными выходами программируемого контроллера и сенсорной операторской панели.
2. Лабораторная флотационная машина по п. 1, отличающаяся тем, что съемная камера выполнена в виде сосуда в форме прямой восьмигранной призмы, содержащего не менее двух рукавов для отвода пены и карман для размещения датчика уровня пульпы во флотационной машине.
3. Лабораторная флотационная машина по п. 1, отличающаяся тем, что съемная камера выполнена в виде цилиндра.
4. Лабораторная флотационная машина по п. 1, отличающаяся тем, что съемная камера выполнена в виде усеченного конуса.
5. Лабораторная флотационная машина по п. 1, отличающаяся тем, что съемная камера выполнена в виде прямоугольного параллелепипеда.
| Лабораторная флотационная машина типа ФИП-Л, ООО "Вэктис Минералз", с.1-4, [найдено 25.07.2017], Найдено из Интернет: http://www.twellgroup.ru/floto_lab.html, 01.05.2016 | |||
| Лабораторная флотационная машина | 1983 |
|
SU1103903A1 |
| Лабораторная флотационная машина | 1978 |
|
SU774607A1 |
| Лабораторная флотационная машина | 1985 |
|
SU1266564A1 |
| CN 204247384 U, 08.04.2015 | |||
| CN 202715482 U, 06.02.2013. | |||

