Группа изобретений относится к области обеспечения безопасности движения транспортных средств (ТС) и касается технических решений по обнаружению движущегося объекта (ТС или пешехода), пересекающего траекторию движения ТС или приближающегося к ней с целью пересечения.
Для транспортного средства характерными являются два вида движения - по ходу движения и задним ходом.
Обычно безопасность движения ТС обеспечивается визуально водителем из расчета, что водитель самостоятельно обязан оценить ситуацию перед автомобилем или позади него и обеспечить такой выбор параметров движения (скорость, полосу движения и т.д.), при которых исключается столкновение с другим ТС или препятствием, или пешеходом.
Кабина габаритного транспортного средства расположена на достаточной высоте от дорожной поверхности, что затрудняет водителю обзор под передними колесами, так как перед кабиной для водителя образуется мертвая зона по обзорности. При повороте такого габаритного транспортного средства водитель вообще не контролирует переднебоковую зону - он ее не видит.
То же самое относится практически ко всем габаритным транспортным средствам типа автобусов, грузовых транспортных средств и к легковым транспортным средствам с удлиненной передней частью кузова (капотом). Если водитель такого легкового автомобиля начинает поворот, а на повороте припаркован другой автомобиль, то дорожную ситуацию водитель может оценить только после того, как передняя часть его автомобиля практически полностью выедет за поворот.
Парковка задним ходом (движение задним ходом) является одним из сложных элементов вождения автомобиля. Движение задним ходом не уберегает от досадных инцидентов и столкновений с различными препятствиями - ограждением, бордюром, автомобилем или пешеходом.
В условиях, когда визуально водитель не может оценить дорожную ситуацию из-за препятствий, получили распространение технические решения для обеспечения обзорности с использованием устанавливаемых на ТС видеокамер и мониторов. При этом камеры располагают с возможностью обзора и съемки фронтальной зоны (JP 2010002275 A, B60R 1/00, 07.01.2010; JP 2008114672 A, 22.05.2008; US 2009243880 A1, B60Q 1/00, 01.10.2009), задней зоны (GB 2463544 A, B60W 30/18, 24.03.2010; GB 2357743 A, B60Q 1/48, 04.07.2001), боковых зон (JP 2009017572 A, B60R 1/00, 22.01.2009), а также одновременно всех зон (DE 19937489 A1, B60Q 1/52, 08.02.2001; RU 2007123679 A, B60R 21/00, 27.12.2008 - прототип). Полученные камерами изображения дорожной ситуации воспроизводятся на мониторе для водителя.
Отдельные системы с видеокамерами и мониторами только предупреждают водителя об опасном приближении к препятствию и не могут предотвратить наезд. Другие системы контролирует исключительно зону перед передним или за задним бамперами и не выдают сигнала, если препятствие, например пешеход, расположено чуть левее или правее автомобиля, то есть сбоку от него. Вполне возможна ситуация, при которой пешеход делает шаг с тротуара и попадает в зону, например, заднего бампера. В этом случае сигнал от датчиков поступает на информационное табло монитора или включает звуковую систему, но не предотвращает наезд, так как данная информация из категории предупреждающей автоматически переводится в констатирующую.
Вместе с тем ряд технических решений с использованием видеокамер и мониторов обеспечивают формирование управляющего или информационного сигнала, достаточного для коррекции движения автомобиля (например, в сторону снижения скорости или остановки) или для организации визуальных и звуковых сигналов для информации водителя о наступающем событии.
Подчеркнем, что потенциально опасными являются фронтально возникающие препятствия, которые возникают именно сбоку автомобиля. Это касается таких движущихся объектов (ТС или пешеходов), которые пересекают (приближаются с целью пересечения к) траекторию движения ТС. Необходимость контроля за такими объектами наиболее актуальна в условиях плохого освещения дорог или отсутствия освещения вообще. В темное время суток освещенность дороги обеспечивается только передними фарами автомобиля и при отсутствии дорожного освещения фонарными столбами водитель не всегда может видеть приближающегося к дороге или идущего по обочине дороги пешехода.
Однако известные системы не обеспечивают качественный контроль за дорожной ситуацией и не позволяют осуществлять маневрирование ТС с высоким уровнем безопасности при возникновении боковых препятствий.
Настоящая группа изобретений направлена на решение технической задачи по совершенствованию визуального контроля в переднебоковой зоне или в заднебоковой зоне по ходу движения ТС. Достигаемый при этом технический результат заключается в повышении безопасности движения за счет обеспечения обзорности зон, визуально не воспринимаемых водителем по ходу движения или при движении задним ходом, и определения водителем расстояния относительно объектов, препятствующих маневрированию ТС.
Указанный технический результат для первого варианта (движение ТС вперед) достигается заявленным способом наблюдения за дорожной ситуацией с движущегося транспортного средства, согласно которому посредством, по крайней мере, одной видеокамеры, закрепленной на транспортном средстве (ТС), осуществляют съемку фронтальной зоны по ходу движения перед ТС и выводят изображение дорожной ситуации в этой зоне на экран монитора для водителя, при включении светового указателя поворота или при повороте управляемых колес ТС, или голосовой командой, или активацией кнопки дополнительно посредством, по крайней мере, одной дополнительной видеокамеры, закрепленной в зоне переднего бампера ТС, осуществляют съемку переднебоковой зоны по ходу движения, в дополнительном окне экрана монитора или поверх изображения дорожной ситуации во фронтальной зоне наносят габаритные метки, характеризующие границы положения ТС при его выезде на дорогу или после совершения возможного маневра и выводят на размеченный метками участок экрана монитора изображение дорожной ситуации в переднебоковой зоне с обеспечением возможности визуального определения водителем расстояния до/между объекта(-ми), препятствующего (ими) совершению возможного маневра.
Указанный технический результат для второго варианта (движение ТС задним ходом) достигается заявленным способом наблюдения за дорожной ситуацией с движущегося транспортного средства, согласно которому посредством, по крайней мере, одной видеокамеры, закрепленной на транспортном средстве (ТС), осуществляют съемку фронтальной зоны по ходу движения перед ТС и выводят изображение дорожной ситуации в этой зоне на экран монитора для водителя, при включении светового указателя поворота или при повороте управляемых колес ТС, или голосовой командой, или активацией кнопки дополнительно посредством, по крайней мере, одной дополнительной видеокамеры, закрепленной в зоне заднего бампера ТС, осуществляют съемку заднебоковой зоны по ходу движения, в дополнительном окне экрана монитора или поверх изображения дорожной ситуации во фронтальной зоне наносят габаритные метки, характеризующие границы положения ТС при его выезде на дорогу или после совершения возможного маневра и выводят на размеченный метками участок экрана монитора изображение дорожной ситуации в заднебоковой зоне с обеспечением возможности визуального определения водителем расстояния до/между объекта(-ми), препятствующего (ими) совершению возможного маневра.
Перечисленные признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности существенных признаков, достаточной для получения указанного технического результата
Настоящее изобретение поясняется конкретным примером, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения приведенной совокупностью признаков требуемого технического результата.
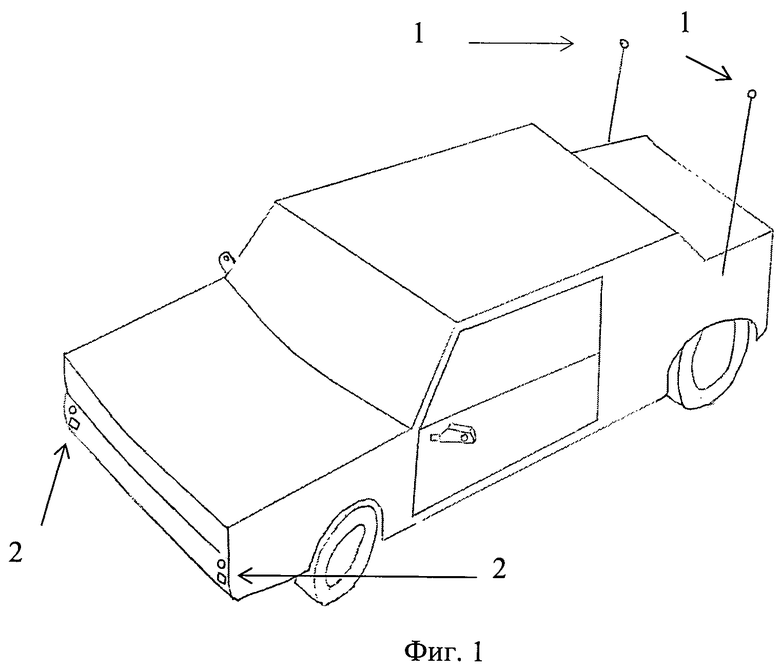
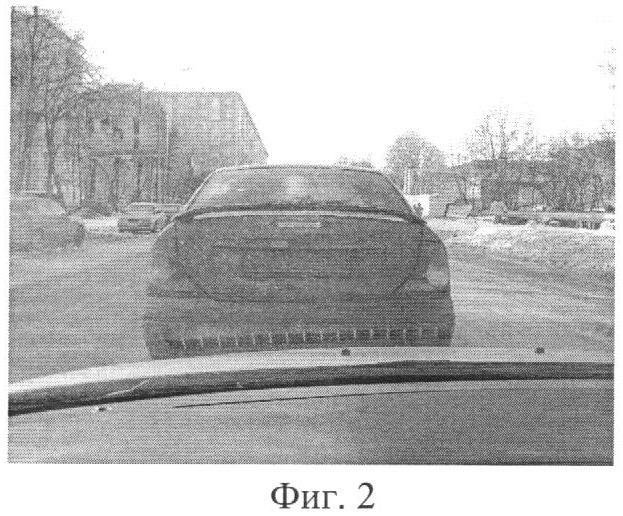
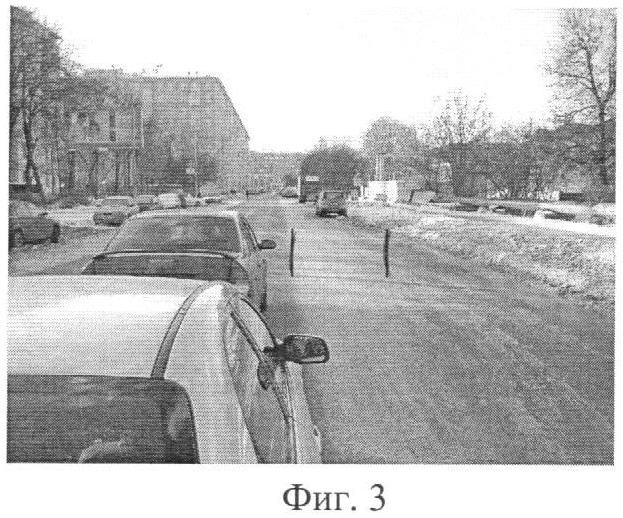
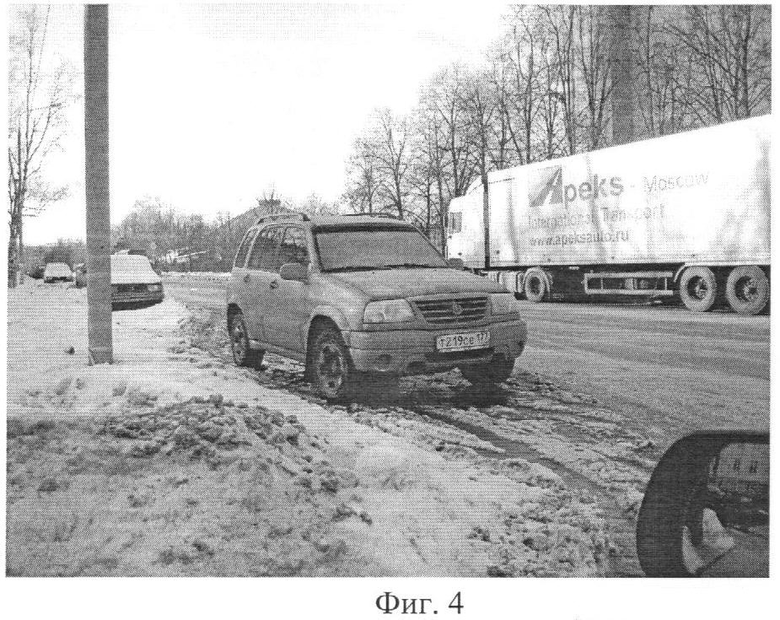
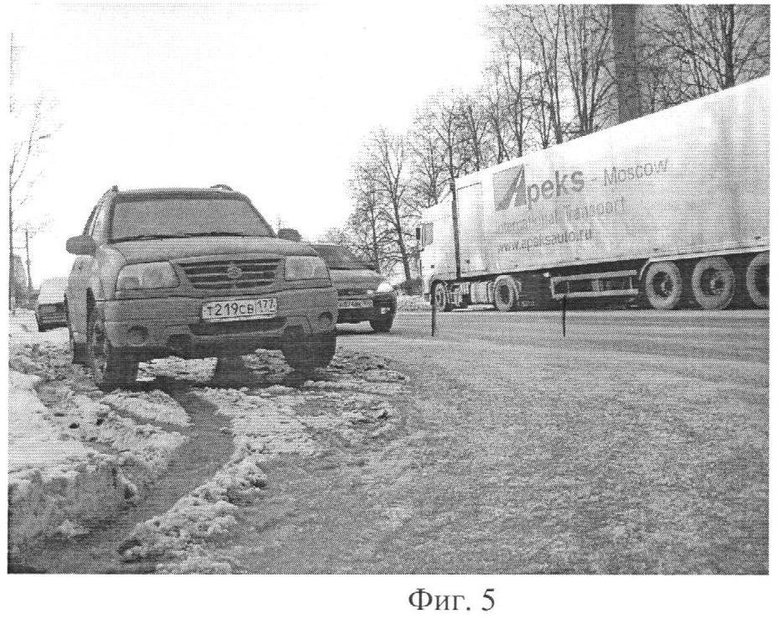
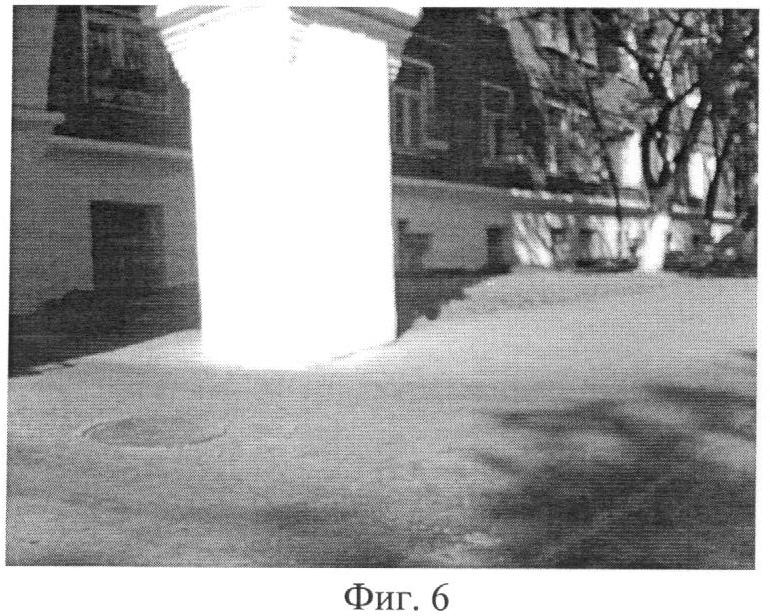
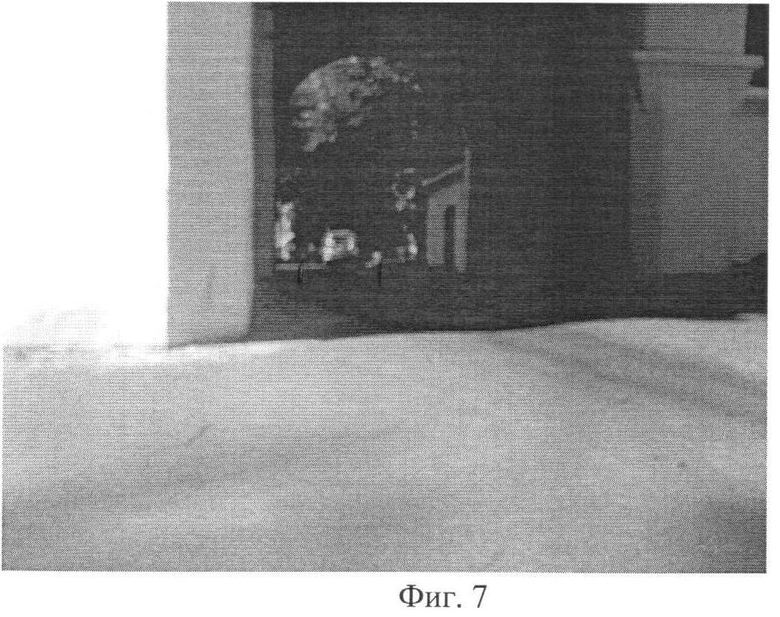
На фиг.1 показаны места размещения видеокамер на легковом автомобиле для обзорности при движении передним ходом; на фиг.(фото) 2 - вид фронтальный, который водитель видит через лобовое стекло; на фиг.(фото) 3 - то же, что на фиг.2, изображение, полученное с фронтально работающей видеокамеры; на фиг.(фото) 4 - вид глазами водителя при выезде на Т-образный перекресток; на фиг.(фото) 5 - то же, что на фиг.4, изображение, полученное с дополнительной видеокамеры, размещенной в зоне переднего бампера; на фиг.(фото) 6 - вид с камеры заднего фронтального обзора (над номерным знаком) при заезде ТС в арку задним ходом; на фиг.(фото) 7 - то же, что на фиг.(фото) 6, изображение, полученное с дополнительной видеокамеры обзора заднебоковой зоны автомобиля, закрепленной в районе заднего бампера.
Согласно настоящей группе изобретений представлены варианты способа наблюдения за дорожной ситуацией с движущегося ТС с обеспечением дополнительного обзора зон, визуально недоступных для водителя во время движения передним ходом или задним ходом.
Способ наблюдения за дорожной ситуацией с движущегося ТС при движении вперед заключается в том, что посредством, по крайней мере, одной видеокамеры, закрепленной на ТС, осуществляют съемку фронтальной зоны по ходу движения перед ТС и выводят изображение дорожной ситуации в этой зоне на монитор для водителя. Однако перед или во время совершения маневра, например при перестроении или повороте, дополнительно посредством, по крайней мере, одной дополнительной видеокамеры, закрепленной в зоне переднего бампера ТС, осуществляют съемку переднебоковой зоны по ходу движения и выводят изображение дорожной ситуации в этой зоне на монитор для водителя в виде дополнительного окна или поверх изображения дорожной ситуации во фронтальной зоне.
При этом включают дополнительную видеокамеру, т.е. начинают осуществлять видеосъемку, при включении светового указателя поворота или при повороте управляемых колес ТС, или голосовой командой, или активацией кнопки.
При движении задним ходом так же посредством, по крайней мере одной видеокамеры, закрепленной на ТС, осуществляют съемку зоны за ТС и выводят изображение дорожной ситуации в этой зоне на монитор для водителя. Но при движении задним ходом при повороте управляемых колес или голосовой командой, или активацией кнопки посредством, по крайней мере, одной дополнительной видеокамеры, закрепленной в зоне заднего бампера ТС, осуществляют съемку заднебоковой зоны по ходу движения и выводят изображение дорожной ситуации в этой зоне на монитор для водителя в виде дополнительного окна или поверх изображения дорожной ситуации в задней зоне.
Система увеличения обзора для реализации заявленных способов монтируется на автомобиле и может быть устроена следующим образом.
В автомобиле имеется встроенный компьютер или процессорный блок с монитором, монтируемым с учетом раскрытия подушек безопасности по центру передней панели салона в поле зрении водителя, предусмотрено несколько видеокамер.
Видеокамеры 1, отображающие обстановку перед ТС, монтируются на выносных стойках в задних крыльях ТС.
Видеокамеры 2, отображающие обстановку в переднебоковой зоне ТС, монтируются на переднем бампере по его углам (в зоне переднего бампера).
Видеокамеры, отображающие обстановку сзади ТС и в заднебоковой зоне, монтируются в районе номерного знака и на заднем бампере (в зоне заднего бампера).
На мониторе при включенных видеокамерах 1 одновременно отображаются изображения с этих видеокамер: фронтальная зона перед автомобилем. Таким образом, водитель всегда видит, что происходит перед ТС, в том числе и в боковых фронтальных зонах.
На фиг.2 представлен передний вид глазами водителя, а на фиг.3 представлено изображение той же дорожной обстановки с видеокамеры обзора фронтальной зоны.
На фиг.6 представлено изображение с задней фронтальной камеры при заезде в арку, а на фиг.7 - изображение той же дорожной обстановки с видеокамеры обзора заднебоковой зоны.
В наиболее близком аналоге (RU 2007123679 А) габаритные метки наносятся на изображения, полученные и выведенные на монитор с видеокамер обзора фронтальной зоны (фиг.3 и 7). Эти метки представляют собой границы положения ТС, если бы оно выехало на дорогу. За счет размеченных габаритных меток водитель заранее знает о потенциальной возможности или невозможности проезда по ширине в своей и соседних полосах.
При включении светового указателя поворота дополнительно на мониторе отображаются изображения с дополнительных камер. Актуальным это является при выезде из арок, проезде Т-образных перекрестков. Данные преимущества хорошо видны на фиг.4 и 5. Так на фиг.4 указан вид глазами водителя на выезд автомобиля на Т-образный перекресток, а на фиг.5 - изображение с видеокамеры при том же положении автомобиля, что и на фиг.4.
В заявленных способах, в отличие от прототипа, габаритные метки наносятся еще и на изображения, полученные с видеокамер обзора боковых зон и выведенные в дополнительное окно экрана монитора или поверх изображения дорожной ситуации во фронтальной зоне. Эти метки представляют собой границы положения ТС при его выезде на дорогу или после совершения возможного маневра. За счет размеченных габаритных меток (фиг.7) водитель может визуально определять расстояния до/между объекта(-ми), препятствующего (ими) совершению возможного маневра. Данной информации достаточно для уяснения принципиальной возможности совершения маневра без помехи другим участником дорожного движения.
Компьютер настраивается таким образом, чтобы во время движения ТС отображались только изображения с камер или GPS-навигация. Компьютер постоянно записывает изображения со всех камер, информацию о включении световых указателей поворота и т.д. на жесткий диск - HDD и съемный носитель информации, на которые осуществляется круговая запись последних 5-10 минут.
Таким образом, заявленной группой изобретений обеспечиваются: увеличение обзора водителю, запись видеоинформации во время движения, при повсеместном использовании включение световых указателей поворота большим количеством водителей, езда с меньшим количеством перестроений, улучшение экологии (уменьшение расхода бензина), меньшее изнашивания тормозных колодок.
Группа изобретений промышленно применима, так как может быть реализована с использованием известных электронных технологий, применяемых для средств электронного контроля.
Группа изобретений относится к области обеспечения безопасности движения транспортных средств (ТС) и касается технических решений по обнаружению движущегося объекта (ТС или пешехода), пересекающего траекторию движения ТС или приближающегося к ней с целью пересечения. Посредством видеокамер, закрепленных на ТС, осуществляют съемку фронтальной или задней зоны по ходу движения ТС и выводят изображения дорожной ситуации в этих зонах на экран монитора для водителя. При включении светового указателя поворота или при повороте управляемых колес ТС, или голосовой командой, или активацией кнопки дополнительно посредством дополнительных видеокамер, закрепленных в зоне переднего и заднего бампера ТС, осуществляют съемку переднебоковой или заднебоковой зон по ходу движения. В дополнительном окне экрана монитора или поверх изображения дорожной ситуации во фронтальной зоне наносят габаритные метки, характеризующие границы положения ТС при его выезде на дорогу или после совершения возможного маневра, и выводят на размеченный метками участок экрана монитора изображение дорожной ситуации в переднебоковой или заднебоковой зонах. Этим обеспечивается возможность визуального определения водителем расстояния до/между объекта(-ми), препятствующего(-ими) совершению возможного маневра. Группа изобретений позволяет совершенствовать визуальный контроль в переднебоковой зоне или в заднебоковой зоне по ходу движения ТС. Достигаемый при этом технический результат заключается в повышении безопасности движения. 2 н.п. ф-лы, 7 ил.
1. Способ наблюдения за дорожной ситуацией с движущегося транспортного средства, согласно которому при движении вперед посредством, по крайней мере, одной видеокамеры, закрепленной на транспортном средстве (ТС), осуществляют съемку фронтальной зоны по ходу движения перед ТС и выводят изображение дорожной ситуации в этой зоне на экран монитора для водителя, при включении светового указателя поворота или при повороте управляемых колес ТС, или голосовой командой, или активацией кнопки дополнительно посредством, по крайней мере, одной дополнительной видеокамеры, закрепленной в зоне переднего бампера ТС, осуществляют съемку переднебоковой зоны по ходу движения, в дополнительном окне экрана монитора или поверх изображения дорожной ситуации во фронтальной зоне наносят габаритные метки, характеризующие границы положения ТС при его выезде на дорогу или после совершения возможного маневра, и выводят на размеченный метками участок экрана монитора изображение дорожной ситуации в переднебоковой зоне с обеспечением возможности визуального определения водителем расстояния до/между объекта(-ми), препятствующего(-ими) совершению возможного маневра.
2. Способ наблюдения за дорожной ситуацией с движущегося транспортного средства, согласно которому при движении задним ходом посредством, по крайней мере, одной видеокамеры, закрепленной на транспортном средстве (ТС), осуществляют съемку фронтальной зоны по ходу движения за ТС и выводят изображение дорожной ситуации в этой зоне на экран монитора для водителя, при включении светового указателя поворота или при повороте управляемых колес ТС, или голосовой командой, или активацией кнопки дополнительно посредством, по крайней мере, одной дополнительной видеокамеры, закрепленной в зоне заднего бампера ТС, осуществляют съемку заднебоковой зоны по ходу движения, в дополнительном окне экрана монитора или поверх изображения дорожной ситуации во фронтальной зоне наносят габаритные метки, характеризующие границы положения ТС при его выезде на дорогу или после совершения возможного маневра, и выводят на размеченный метками участок экрана монитора изображение дорожной ситуации в заднебоковой зоне с обеспечением возможности визуального определения водителем расстояния до/между объекта(-ми), препятствующего(-ими) совершению возможного маневра.
| RU 2007123679 А, 27.12.2008 | |||
| DE 19937489 A1, 08.02.2001 | |||
| JP 2009017572 A, 22.01.2009 | |||
| ЛИНЕЙНОЕ УСТРОЙСТВО РАЗДЕЛЕНИЯ НА УДЛИНЕННОМ КУМУЛЯТИВНОМ ЗАРЯДЕ | 2011 |
|
RU2463544C1 |
| JP 2010002275 A, 07.01.2010. | |||

