Заявление об установлении приоритета
Настоящая заявка притязает на приоритет предварительной патентной заявки США, серийный номер 61/621,876, поданной 9 апреля 2012 г. и включенной в настоящий документ путем отсылки во всей своей полноте.
Область техники
Настоящее описание в целом относится к ультразвуковым хирургическим системам, а более конкретно - к ультразвуковым и электрохирургическим системам, позволяющим хирургам выполнять разрезание и коагуляцию тканей.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Ультразвуковые хирургические аппараты находят все более широкое применение в хирургических процедурах благодаря их уникальным рабочим характеристикам. В зависимости от особенностей конфигурации и рабочих характеристики аппарата, он может предоставлять возможность одновременного рассечения ткани и остановки кровотечения благодаря коагуляции, что уменьшает травмирование пациента. Рассекающее действие обычно выполняется с помощью концевого зажима или наконечника-лезвия, расположенного на дистальном конце аппарата и передающего ультразвуковую энергию ткани, находящейся в контакте с концевым зажимом. Ультразвуковые хирургические аппараты такого типа могут быть разработаны для использования в открытых хирургических операциях, при лапароскопии или эндоскопических хирургических процедурах, включая роботизированные процедуры.
Некоторые хирургические аппараты применяют ультразвуковую энергию как для точного рассечения, так и для управляемой коагуляции. Ультразвуковая энергия рассекает и коагулирует с использованием более низких температур, чем температуры, используемые в электрохирургии. Вибрируя с высокой частотой (например, 55000 раз в секунду), ультразвуковое лезвие денатурирует белок в ткани с образованием липкого коагулянта. Давление, приложенное к ткани поверхностью лезвия, сплющивает кровеносные сосуды, позволяя коагулянту создать кровоостанавливающую герметизацию. Точность рассечения и коагуляции зависит от способа, выбранного хирургом, и контролируется регулировкой уровня мощности, кромкой лезвия, протягиванием ткани и давлением на лезвие.
Первоочередной задачей ультразвуковых технологий при их применении в медицинских устройствах, однако, остается герметизация кровеносных сосудов. Работа, проведенная заявителем и его командой, продемонстрировала, что оптимальная герметизация сосуда происходит тогда, когда внутренний мышечный слой сосуда отделяется и перемещается в направлении от адвентициальной оболочки до приложения стандартной ультразвуковой энергии. Производимые в настоящее время попытки достичь такого отделения заключались в повышении зажимающей силы, прилагаемой к сосуду.
Более того, часто пользователь не располагает визуальным изображением разрезаемой ткани. Таким образом, желательным является предоставление некоторой формы обратной связи для того, чтобы в отсутствие визуальной обратной связи пользователь мог узнать, что разрез завершен. Более того, не имея некоторой формы индикатора обратной связи для обозначения того, что разрез завершен, пользователь может продолжать активировать гармонический аппарат, несмотря на то, что разрез уже завершен, что может вызвать повреждение гармонического аппарата и окружающих тканей тепловой энергией, которую генерирует гармонический инструмент, когда между его браншами находится малое количество материала или материал между браншами отсутствует.
Ультразвуковой преобразователь может быть выполнен в виде эквивалентной цепи, первая ветвь которой содержит статическую емкость, и вторая ветвь которой содержит последовательно подключенные индуктивность, сопротивление и емкость, определяющие электромеханические характеристики резонатора. Традиционные ультразвуковые генераторы могут содержать регулируемый индуктор для регулировки статической емкости при резонансной частоте, таким образом, чтобы по существу весь выходной ток генератора протекал в механическую ветвь. Ток в механической ветви вместе с напряжением привода определяют полное сопротивление и фазовую амплитуду. Соответственно, при использовании регулируемого индуктора, выходной ток генератора представляет собой ток в механической ветви, и, таким образом, генератор способен поддерживать выходную мощность привода при резонансной частоте ультразвукового преобразователя. Регулируемый индуктор также преобразовывает фазовую диаграмму полного сопротивления ультразвукового преобразователя для улучшения возможностей частотной синхронизации генератора. Однако, регулируемый индуктор должен соответствовать определенной статической емкости ультразвукового преобразователя. Другой ультразвуковой преобразователь, имеющий другую статическую емкость, требует применения другого регулируемого индуктора.
Электрохирургические приспособления, предназначенные для приложения электрической энергии к ткани для обработки и/или разрушения ткани, также находят все более широкое применение в хирургических процедурах. Электрохирургическое приспособление обычно содержит рукоятку, инструмент, имеющий расположенный дистально концевой зажим (например, один или более электродов). Концевой зажим может быть расположен напротив ткани таким образом, чтобы ткани сообщался электрический ток. Электрохирургические приспособления могут быть разработаны для биполярных или монополярных операций. Во время биполярной операции ток сообщается ткани и возвращается от ткани посредством активного и возвратного электродов концевого зажима, соответственно. Во время монополярной операции ток сообщается ткани с помощью активного электрода концевого зажима и возвращается через возвратный электрод (например, заземляющий электрод), расположенный отдельно на теле пациента. Тепло, генерируемое током, протекающим через ткань, может образовывать гемостатическое уплотнение внутри ткани и/или между тканями и, таким образом, может быть полезно, например, для герметизации кровеносных сосудов. Концевой зажим электрохирургического приспособления может содержать режущий элемент, который может двигаться относительно ткани, и электроды, предназначенные для рассечения ткани.
Электрическая энергия, сообщаемая электрохирургическим приспособлением, может передаваться аппарату с помощью генератора, соединенного с рукояткой. Электрическая энергия может иметь вид радиочастотной (РЧ) энергии. РЧ энергия является видом электрической энергии, которая может находиться в диапазоне частот от 300 килогерц (кГц) до 1 мегагерца (MГц). При использовании, электрохирургическое приспособление может передавать низкочастотную РЧ энергию через ткань, что вызывает возбуждение или трение ионов, а, в сущности - резистивный нагрев, таким образом повышая температуру ткани. Поскольку между тканью, подверженной действию электрической энергии, и окружающей тканью образуется четкая граница, хирурги могут действовать с высоким уровнем точности и контроля, не повреждая нецелевую прилегающую ткань. Низкие рабочие температуры радиочастотной энергии способствуют удалению, сокращению и моделированию мягких тканей, одновременно герметизируя кровеносные сосуды. Радиочастотная энергия имеет особенно эффективное воздействие на соединительную ткань, которая состоит в основном из коллагена и сокращается при контакте с теплом.
Желательным является предоставление хирургического аппарата, который будет компенсировать некоторые недостатки аппаратов, используемых в настоящее время. Хирургическая система, описанная в настоящем документе, компенсирует такие недостатки.
ФИГУРЫ
Новые отличительные признаки описанных форм указаны в приложенной формуле изобретения. Однако, с точки зрения конструкции и способов функционирования, описанные формы станут более понятными из представленного ниже описания со ссылками на прилагаемые фигуры, указанные далее.
На ФИГ. 1 представлено перспективное изображение одной формы ультразвукового хирургического аппарата.
На ФИГ. 2 представлено перспективное изображение одной формы узла ультразвукового хирургического аппарата с пространственным разделением деталей.
На ФИГ. 3 представлена схема одной формы прихвата, изображающая силовые расчеты.
На ФИГ. 4 изображено графическое представление волновых форм тока, напряжения, мощности, полного сопротивления и частоты осциллятора обычного типа при высокой мощности и легком нагружении.
На ФИГ. 5 изображено графическое представление волновых форм тока, напряжения, мощности, полного сопротивления и частоты осциллятора обычного типа при высокой мощности и сильном нагружении.
На ФИГ. 6 изображено графическое представление волновой формы функции скачка тока и волновых форм напряжения, мощности, полного сопротивления и частоты одной формы ненагруженного осциллятора.
На ФИГ. 7 изображено графическое представление волновой формы функции скачка тока и волновых форм напряжения, мощности, полного сопротивления и частоты одной формы легко нагруженного осциллятора.
На ФИГ. 8 изображено графическое представление волновой формы функции скачка тока и волновых форм напряжения, мощности, полного сопротивления и частоты одной формы сильно нагруженного осциллятора.
На ФИГ. 9 представлена одна форма приводной системы генератора, который генерирует ультразвуковой электрический сигнал для приведения в действие ультразвукового преобразователя.
На ФИГ. 10 представлена одна форма хирургической системы, содержащая ультразвуковой хирургический аппарат и генератор, содержащий модуль сопротивления ткани.
На ФИГ. 11 представлена одна форма приводной системы генератора, содержащего модуль сопротивления ткани.
На ФИГ. 12 представлена одна форма узла прихвата, который может использоваться с хирургической системой.
На ФИГ. 13 представлен схематически график модуля сопротивления ткани, соединенного с лезвием и узлом прихвата, между которыми расположена ткань.
На ФИГ. 14 изображена одна форма способа приведения в действие концевого зажима, соединенного с ультразвуковой приводной системой хирургического аппарата.
На ФИГ. 15A представлена логическая блок-схема одной формы определения изменения состояния ткани и, соответственно, активации выходного индикатора.
На ФИГ. 15B представлена логическая блок-схема, изображающая одну форму работы модуля анализа точки перегиба частоты.
На ФИГ. 15C представлена логическая блок-схема 900, изображающая одну форму работы модуля анализа падения напряжения.
На ФИГ. 16 представлена одна форма хирургической системы, содержащей генератор и различные хирургические аппараты, используемые с ней.
На ФИГ. 16A представлена схема ультразвукового хирургического аппарата, показанного на ФИГ. 16.
На ФИГ. 17 представлена хирургическая система, показанная на ФИГ. 16.
На ФИГ. 18 представлена модель, изображающая ток в механической ветви в одной форме.
На ФИГ. 19 представлен структурный вид архитектуры генератора в одной форме.
На ФИГ. 20 представлена логическая блок-схема алгоритма ткани, который может быть применен в одной форме генератора.
На ФИГ. 21 представлена логическая блок-схема части тканевого алгоритма оценки сигнала, которая является частью тканевого алгоритма, показанного на ФИГ. 20, которая может быть применена в одной форме генератора.
На ФИГ. 22 представлена логическая блок-схема для оценки множеств условий тканевого алгоритма оценки сигнала, показанного на ФИГ. 21, который может быть применен в одной форме генератора.
На ФИГ. 23A приведено графическое представление волновой формы наклона частоты (производной частоты первой степени) в зависимости от времени для одной формы генератора во время обычного разреза ткани.
На ФИГ. 23B приведено графическое представление волновой формы наклона частоты (производной второй степени частоты) в зависимости от времени, показанной пунктиром и наложенной на волновую форму, изображенную на ФИГ. 23A, для одной формы генератора во время обычного разреза ткани.
На ФИГ. 24 представлено графическое представление волновой формы частоты в зависимости от времени одной формы генератора во время обычного разреза, относящееся к графическому представлению, показанному на ФИГ. 23A.
На ФИГ. 25 представлено графическое представление волновой формы мощности привода в зависимости от времени для одной формы генератора во время обычного разреза, относящееся к графическому представлению, показанному на ФИГ. 23A.
На ФИГ. 26 приведено графическое представление волновой формы наклона частоты в зависимости от времени для одной формы генератора во время приработки оборудования.
На ФИГ. 27 представлено графическое представление волновой формы частоты в зависимости от времени для одной формы генератора во время приработки оборудования, относящееся к графическому представлению, показанному на ФИГ. 26.
На ФИГ. 28 представлено графическое представление волновой формы потребления мощности в зависимости от времени для одной формы генератора во время приработки оборудования, относящееся к графическому представлению, показанному на ФИГ. 26.
На ФИГ. 29 представлено графическое представление волновой формы изменения частоты в зависимости от времени для нескольких комбинаций генератора и аппарата во время приработки оборудования.
На ФИГ. 30 представлено графическое представление волновых форм нормализованного полного сопротивления, тока, частоты, мощности, энергии и температуры для одной формы генератора, соединенного с ультразвуковым аппаратом, для выполнения 10 последовательных разрезов на иссеченной ткани свиного тонкого кишечника с наиболее высокой возможной скоростью при постоянно включенном генераторе.
На ФИГ. 31A представлено графическое представление волновых форм полного сопротивления и тока в зависимости от времени для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени.
На ФИГ. 31B дано графическое представление волновой формы частоты в зависимости от времени для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени.
На ФИГ. 31C дано графическое представление волновых форм мощности, энергии и температуры в зависимости от времени для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени.
На ФИГ. 32 дано комбинированное графическое представление волновой формы частоты, взвешенного наклона частоты, рассчитанного с помощью экспоненциально-взвешенного скользящего среднего со значением альфа 0,1 и волновой формы температуры в зависимости от времени для одной формы генератора.
На ФИГ. 33 дано графическое представление волновой формы частоты в зависимости от времени, представленной на ФИГ. 32.
На ФИГ. 34 дано графическое представление волновой формы взвешенного наклона частоты в зависимости от времени, представленной на ФИГ. 32.
На ФИГ. 35 дано графическое представление волновой формы частоты в зависимости от времени для одной формы генератора при выполнении десяти разрезов ткани тонкого кишечника и графическое представление сигнала изменения температуры в зависимости от времени.
На ФИГ. 36 дано графическое представление волновой формы частоты в зависимости от времени, показанной на ФИГ. 35, для одной формы генератора при выполнении десяти разрезов ткани тонкого кишечника с активацией промежуточной ткани.
На ФИГ. 37 дано графическое представление волновой формы наклона частоты в зависимости от времени для одной формы генератора при выполнении десяти разрезов ткани тонкого кишечника.
На ФИГ. 38 дано графическое представление волновой формы мощности в зависимости от времени, которая представляет собой мощность, потребленную одной формой генератора при выполнении десяти разрезов ткани тонкого кишечника.
На ФИГ. 39 дано графическое представление волновой формы тока в зависимости от времени для одной формы генератора при выполнении десяти разрезов ткани тонкого кишечника.
На ФИГ. 40 дано графическое представление параметра «перекрестно-обратного порога наклона частоты» в связи с волновой формой наклона частоты в зависимости от времени для одной формы генератора.
На ФИГ. 41 дано комбинированное графическое представление импульсного применения одной формы ультразвукового хирургического аппарата на иссеченной сонной артерии, изображающее волновые формы нормализованной мощности, тока, энергии и частоты в зависимости от времени.
На ФИГ. 42A представлено графическое представление волновых форм полного сопротивления и тока в зависимости от времени для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени.
На ФИГ. 42B дано графическое представление волновой формы частоты в зависимости от времени для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени.
На ФИГ. 42C дано графическое представление волновых форм мощности, энергии и температуры в зависимости от времени для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени.
На ФИГ. 43 дано графическое представление рассчитанной волновой формы наклона частоты для импульсного применения, показанного на ФИГ. 41 и ФИГ. 50A-C в грубом приближении.
На ФИГ. 44 дано графическое представление крупным планом рассчитанной волновой формы наклона частоты для импульсного применения, показанного на ФИГ. 43.
На ФИГ. 45 дано графическое представление волновых форм других данных, таких как полное сопротивление, мощность, энергия и температура.
На ФИГ. 46 дано графическое представление изменения суммарного наклона взвешенной частоты в зависимости от уровня мощности для различных типов ультразвуковых хирургических аппаратов.
На ФИГ. 47 дано графическое представление волновых форм резонансной частоты, усредненной резонансной частоты и наклона частоты в зависимости от времени для одной формы генератора.
На ФИГ. 48 представлен крупный план волновых форм резонансной частоты и усредненной резонансной частоты в зависимости от времени, представленных на ФИГ. 47.
На ФИГ. 49 представлен крупный план волновых форм резонансной частоты и тока времени для одной формы генератора.
На ФИГ. 50 дано графическое представление волновых форм нормализованной комбинированной мощности, полного сопротивления, тока, энергии, частоты и температуры для одной формы генератора, соединенного с ультразвуковым аппаратом.
На ФИГ. 51A и 51B даны графические представления резонансной частоты и наклона частоты соответственно, отображенные одной формой ультразвукового хирургического аппарата во время разреза ультразвуком.
На ФИГ. 52A и 52B даны графические представления резонансной частоты и наклона частоты соответственно, отображенные одной формой ультразвукового хирургического аппарата во время другого разреза ткани ультразвуком.
На ФИГ. 53 представлена логическая блок-схема одной формы тканевого алгоритма, реализующего исходное условие отсечки частоты, которое может быть реализовано в одной форме генератора для анализа исходной резонансной частоты ультразвукового лезвия.
На ФИГ. 54A и 54B даны графические представления частоты лезвия, продемонстрированные в различных примерных активациях ультразвукового оборудования.
На ФИГ. 55 дано графическое представление изменения резонансной частоты и ультразвукового полного сопротивления в зависимости от времени для одной формы, включая множественные разрезы, выполняемые с помощью ультразвукового лезвия.
На ФИГ. 56 представлена логическая блок-схема тканевого алгоритма, который может быть реализован в одной форме генератора и/или аппарата для реализации исходного состояния отсечки частоты в сочетании с другими условиями.
На ФИГ. 57 представлена логическая блок-схема части тканевого алгоритма оценки сигнала, которая является частью тканевого алгоритма, показанного на ФИГ. 20, анализирующего исходное условие отсечки частоты.
На ФИГ. 58 представлена логическая блок-схема одной формы алгоритма мониторинга нагрузки, который может быть реализован в одной форме генератора.
На ФИГ. 59 представлена логическая блок-схема для оценки наборов условий для тканевого алгоритма оценки сигнала, показанного на ФИГ. 57, который может быть применен в одной форме генератора.
На ФИГ. 60 представлена логическая блок-схема для реализации одной формы логического устройства множества нефильтрованных условий, показанного на ФИГ. 59, которое может быть реализовано в одной форме генератора.
На ФИГ. 61 даны графические представления наклона частоты и производной частоты второй степени, иллюстрирующие пару событий нагружения.
На ФИГ. 62 даны графические представления наклона частоты, производной частоты второй степени и дельта качения, демонстрирующие событие нагружения.
На ФИГ. 63 даны графические представления другой формы наклона частоты, производной частоты второй степени и дельта качения, демонстрирующие другое событие нагружения.
На ФИГ. 64 представлена логическая блок-схема для реализации одной формы алгоритма, использующего множество условий, содержащий триггер события нагружения, который может быть использован в одной форме генератора.
На ФИГ. 65 представлена логическая блок-схема для реализации одной формы логического устройства для определения существования условия нагружения в хирургическом аппарате.
На ФИГ. 66 представлена логическая блок-схема одной формы части тканевого алгоритма оценки сигнала, которая является частью тканевого алгоритма, показанного на ФИГ. 20, анализирующая множество условий, применяющих событие нагружения, чтобы запустить триггеры множества ответных реакций.
На ФИГ. 67 представлена логическая блок-схема для оценки множеств условий для тканевого алгоритма оценки сигнала, показанного на ФИГ. 66, который может быть применен в одной форме генератора.
На ФИГ. 68 представлена логическая блок-схема одной формы алгоритма мониторинга нагрузки, который может быть реализован в одной форме генератора, как показано на ФИГ. 67.
На ФИГ. 69 представлена логическая блок-схема для реализации одной формы логического устройства множества нефильтрованных условий, показанного на ФИГ. 67, которое может быть реализовано одной формой генератора.
На ФИГ. 70 представлен график, иллюстрирующий мощность или эпюру смещения для одного примера реализации алгоритма, представленного на ФИГ. 71.
На ФИГ. 71 представлена логическая блок-схема одной формы алгоритма для последовательного приведения в действие ультразвукового хирургического аппарата на двух уровнях мощности.
На ФИГ. 72 представлен график, изображающий давления разрыва, испытываемое хирургическим аппаратом, который работает согласно алгоритму, показанному на ФИГ. 71, путем приведения в действие аппарата на одном уровне мощности.
На ФИГ. 73 представлен график, изображающий времена рассечений для пробных процедур, указанных на ФИГ. 72.
На ФИГ. 74 представлен график, изображающий схему управляющего сигнала в соответствии с одной формой алгоритма, показанного на ФИГ. 71.
На ФИГ. 75 представлена логическая блок-схема другой формы алгоритма, представленного на ФИГ. 71, изображающая паузу между деактивацией аппарата и его последующей активацией.
На ФИГ. 76 представлен график, изображающий схему управляющего сигнала в соответствии с одной формой алгоритма, показанного на ФИГ. 75.
На ФИГ. 77 представлена логическая блок-схема другой формы алгоритма, показанного на ФИГ. 71, реализующая третий управляющий сигнал.
На ФИГ. 78 представлен график, изображающий давления разрыва, испытываемые хирургическим аппаратом, который работает согласно алгоритму, показанному на ФИГ. 71, в сравнении с хирургическим аппаратом, который работает по алгоритму, показанному на ФИГ. 77.
На ФИГ. 79 представлен график, изображающий давления разрыва, испытываемые хирургическим аппаратом, аналогичным аппарату, который работает согласно алгоритму, показанному на ФИГ. 71, в сравнении с хирургическим аппаратом, который работает по алгоритму, показанному на ФИГ. 78.
На ФИГ. 80 представлен график, изображающий времена рассечений для пробных процедур, указанных на ФИГ. 79.
На ФИГ. 81 представлена логическая блок-схема одной формы алгоритма, изображающая исходный период зажимания.
На ФИГ. 82 представлена логическая блок-схема другой формы алгоритма, изображающая исходный период зажимания.
На ФИГ. 83 представлен график, изображающий схему управляющего сигнала в соответствии с алгоритмом, показанным на ФИГ. 82.
На ФИГ. 84 представлена диаграмма, изображающая примерную нейронную сеть.
На ФИГ. 85 представлен график примерного участка функции активации для скрытых нейронов и/или выходного нейрона (выходных нейронов) нейронной сети.
На ФИГ. 86 представлена диаграмма, изображающая примерную функцию активации для скрытых нейронов и/или выходного нейрона (выходных нейронов) нейронной сети.
На ФИГ. 87 представлена логическая блок-схема одной формы алгоритма тренировки нейронной сети, такой как нейронная сеть, представленная на ФИГ. 86, использующего обратное распространение ошибки обучения.
На ФИГ. 88 представлена логическая блок-схема одной формы алгоритма определения множества условий для ультразвукового аппарата, использующего модель со многими переменными.
На ФИГ. 89 представлена логическая блок-схема одной формы алгоритма, использующего модель со многими переменными такую как, например, нейронная сеть, описанная в этом документе.
На ФИГ. 90 представлен график, изображающий схему управляющего сигнала одной реализации алгоритма, показанного на ФИГ. 89.
На ФИГ. 91 представлен график, изображающий схему управляющего сигнала другой реализации алгоритма, показанного на ФИГ. 89.
На ФИГ. 92 представлена логическая блок-схема, изображающая одну форму алгоритма применения модели со многими переменными для мониторинга множества условий, содержащего множественные условия.
На ФИГ. 93 представлен вид сбоку одной формы конфигурации ультразвукового хирургического аппарата, содержащей поворотный электрический разъем, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 94 представлен вид сбоку конфигурации ультразвукового хирургического аппарата, показанной на ФИГ. 93, изображающий узел рукоятки и рукоятку до введения рукоятки в узел рукоятки в соответствии с различными формами, описанными в этом документе.
На ФИГ. 95 показано поперечное сечение узла рукоятки ультразвукового хирургического аппарата, содержащего поворотный электрический разъем, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 96 представлено перспективное изображение соединительного модуля ультразвукового хирургического аппарата, соединенного с гибкой электроникой и рукояткой в соответствии с различными формами, описанными в этом документе.
На ФИГ. 97 представлено изображение с пространственным разделением деталей соединительного модуля, показанного на ФИГ. 96 в соответствии с различными формами, описанными в этом документе.
На ФИГ. 98 представлено перспективное изображение расположения внутреннего и внешнего колец и соответствующих им связей соединительного модуля в соответствии с различными формами, описанными в этом документе.
На ФИГ. 99 представлено перспективное изображение первого и второго кольцевых проводников, размещенных в корпусе соединительного модуля, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 100 представлено перспективное изображение дистальной стороны поворотной муфты, имеющей внутренний и внешний кольцевые проводники и соответствующие им связи, размещенные внутри имеющих выемки частей поворотной муфты, в соответствии с различными формами, описанными в настоящем документе.
На ФИГ. 101 представлено перспективное изображение соединительного модуля, соединенного с дистальным концом рукоятки, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 102 показан вид с проксимального конца, изображающий внутренний и внешний кольцевой проводники и соответствующие им связи, размещенные в поворотной муфте, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 103 представлено перспективное изображение дистальной стороны поворотной муфты, имеющей внутренний и внешний кольцевые проводники и соответствующие им связи, размещенные внутри имеющих выемки частей поворотной муфты, в соответствии с различными формами, описанными в настоящем документе.
На ФИГ. 104 представлен вид слева узла рукоятки ультразвукового аппарата в соответствии с различными формами, описанными в этом документе.
На ФИГ. 105 показан другой вид слева узла рукоятки ультразвукового аппарата, показанного на ФИГ. 104, со снятой левой рукояткой, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 106 показан вид сбоку узла переключателя для ультразвукового хирургического аппарата в соответствии с различными формами, описанными в этом документе.
На ФИГ. 107 показан вид спереди узла переключателя, изображенного на ФИГ. 106, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 108 показан вид снизу узла переключателя, изображенного на ФИГ. 106 и 107, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 109 представлен вид сверху узла переключателя, показанного на ФИГ. 106-109, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 109A показан вид слева части другого узла рукоятки ультразвукового аппарата в соответствии с различными формами, описанными в этом документе.
На ФИГ. 110 представлен вид слева другого узла рукоятки ультразвукового аппарата в соответствии с различными формами, описанными в этом документе.
На ФИГ. 111 представлен вид справа узла рукоятки ультразвукового аппарата, показанной на ФИГ. 110, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 112 показан вид в перспективе части другого узла рукоятки ультразвукового аппарата в соответствии с различными формами, описанными в этом документе.
На ФИГ. 113 представлено перспективное изображение другого второго расположения переключателя в соответствии с различными формами, показанными в настоящем документе.
На ФИГ. 114 представлен вид сзади второго расположения переключателя, показанного на ФИГ. 113, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 115 представлено перспективное изображение сзади другого второго расположения переключателя в соответствии с различными формами, описанными в настоящем документе.
На ФИГ. 116 представлен вид сверху части второго расположения переключателя и узла рукоятки в соответствии с различными формами, описанными в этом документе.
На ФИГ. 117 представлено схематическое изображение узла переключателя, который может быть применен в различных узлах рукоятки ультразвуковых аппаратов, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 118 представлено другое схематическое изображение узла переключателя, показанного на ФИГ. 117, в приведенном в действие положении, когда активирован центральный переключатель, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 119 представлено другое схематическое изображение узла переключателя, показанного на ФИГ. 117 и 118, в другом приведенном в действие положении, когда активирован правый переключатель, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 120 представлено другое схематическое изображение узла переключателя, показанного на ФИГ.117 и 119, в другом приведенном в действие положении, когда активирован левый переключатель, в соответствии с различными формами, описанными в этом документе.
На ФИГ. 121 представлена блок-схема системы, изображающая генератор, соединенный с медицинским аппаратом и электрической цепью.
На ФИГ. 122 представлена блок-схема электрической цепи внутри аппарата.
На ФИГ. 123 представлена циклограмма импульсов тока в кадре передачи данных серийного протокола на выходе генератора.
На ФИГ. 124 представлена циклограмма импульсов напряжения в кадре передачи данных серийного протокола на выходе электрической цепи.
На ФИГ. 125A представлена часть циклограммы серийного протокола передачи данных.
На ФИГ. 125B представлена часть циклограммы серийного протокола передачи данных.
На ФИГ. 125C представлена часть циклограммы серийного протокола передачи данных.
На ФИГ. 125D представлена часть циклограммы серийного протокола передачи данных.
На ФИГ. 126 изображена одна примерная циклограмма серийного протокола передачи данных.
На ФИГ. 127 изображена одна примерная циклограмма серийного протокола передачи данных.
На ФИГ. 128 изображены примерные циклограммы серийного протокола передачи данных.
Описание
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день и полностью включенные в настоящий документ путем ссылки:
- заявка на патент США, озаглавленная «УСТРОЙСТВА И СПОСОБЫ РАЗРЕЗАНИЯ И КОАГУЛЯЦИИ ТКАНИ», досье патентного поверенного № END7126USNP/120116;
- заявка на патент США, озаглавленная «УЗЛЫ ПЕРЕКЛЮЧАТЕЛЕЙ ДЛЯ УЛЬТРАЗВУКОВЫХ ХИРУРГИЧЕСКИХ АППАРАТОВ», досье патентного поверенного № END7126USNP1/120116-1;
- заявка на патент США, озаглавленная «ПОВОРОТНЫЙ ЭЛЕКТРИЧЕСКИЙ РАЗЪЕМ ДЛЯ УЛЬТРАЗВУКОВЫХ ХИРУРГИЧЕСКИХ АППАРАТОВ», досье патентного поверенного № END7126USNP2/120116-2; и
- заявка на патент США, озаглавленная «СЕРИЙНЫЙ ПРОТОКОЛ ПЕРЕДАЧИ ДАННЫХ ДЛЯ МЕДИЦИНСКОГО УСТРОЙСТВА», досье патентного поверенного № END7126USNP3/120116-3.
Перед подробным описанием различных форм ультразвуковых хирургических аппаратов следует отметить, что иллюстративные формы не ограничены в применении или использовании деталями конструкции и расположением частей, показанными в прилагаемых чертежах и описании. Приведенные в качестве примера формы могут быть осуществлены или включены в другие формы, вариации и модификации и могут практически применяться или осуществляться различными способами. Кроме того, если не указано иное, термины и выражения, использованные в данном документе, были выбраны с целью описания примерных форм изобретения для удобства читателя и не предназначены для ограничения области применения таких форм.
Кроме того, следует понимать, что любая или несколько из следующих описанных форм, выражений форм, примеров могут быть объединены с любой или несколькими другими описанными ниже формами, выражениями форм и примерами.
Различные формы направлены на улучшенные ультразвуковые хирургические аппараты, выполненные с возможностью выполнения рассечения, разрезания и/или коагуляции ткани во время хирургических процедур. В одной форме ультразвуковой хирургический аппарат выполнен с возможностью использования в открытых хирургических процедурах, но имеет применение в других видах хирургии, таких как лапароскопия, эндоскопия и хирургические роботизированные процедуры. Разнообразию применения способствует избирательное использование ультразвуковой энергии.
Различные формы описываются в сочетании с ультразвуковым хирургическим аппаратом, описанным в настоящем документе. Такое описание предоставляется в иллюстративных целях, а не с целью ограничения и не предназначено для ограничения объема и области применения таких описаний. Например, любая из описанных форм может быть использована в сочетании с множеством ультразвуковых хирургических аппаратов, включая аппараты, описанные в патентах США №5,938,633; 5,935,144; 5,944,737; 5,322,055; 5,630,420; и 5,449,370.
Как становится очевидно из последующего описания, предполагается, что формы хирургического аппарата, описанного в этом документе, могут быть использованы в сочетании с блоком осциллятора хирургической системы, в результате чего ультразвуковая энергия блока осциллятора обеспечивает желаемое ультразвуковое приведение в действие этого хирургического аппарата. Также предполагается, что формы хирургического аппарата, описанного в этом документе, могут быть использованы в сочетании с блоком генератора сигналов хирургической системы, в результате чего электрическая энергия в виде радиочастот (РЧ), например, используется для обеспечения пользователю обратной связи с хирургическим аппаратом. Ультразвуковой осциллятор и/или блок генератора сигнала может быть неразъемно объединен с хирургическим аппаратом или может быть предоставлен в виде отдельных компонентов, которые могут быть электрически присоединены к хирургическому аппарату.
Одна из форм осуществления настоящего хирургического аппарата специально выполнена с возможностью одноразового использования в силу своей простой конструкции. Тем не менее, также предполагается, что другие формы настоящего хирургического аппарата могут быть выполнены с возможностью не-одноразового или многократного использования. Съемный разъем настоящего хирургического аппарата с соответствующим осциллятором и блоком генератора сигнала в настоящее время раскрыт для использования для одного пациента только в иллюстративных целях. Однако также предусматривается несъемный интегрированный разъем настоящего хирургического аппарата с соответствующим осциллятором и/или блоком генератора сигналов. Соответственно, различные формы описанного в этом документе хирургического аппарата могут быть выполнены с возможностью одноразового использования и/или многократного использования со съемным и/или несъемным интегрированным осциллятором и/или блоком генератора сигналов, без ограничения, и все комбинации таких конфигураций рассматриваются в пределах объема настоящего раскрытия.
На ФИГ. 1-3 изображена одна форма хирургической системы 19, содержащей ультразвуковой хирургический аппарат 100. Хирургическая система 19 содержит ультразвуковой генератор 30, подключенный к ультразвуковому преобразователю 50 с помощью подходящей проводящей среды, такой как провод 22 и ультразвуковой хирургический аппарат 100. Хотя в описываемой форме генератор 30 изображен отдельно от хирургического аппарата 100, в одной форме генератор 30 может быть интегрирован в хирургический аппарат 100 для образования единой хирургической системы 19. Генератор 30 содержит устройство ввода 406, расположенное на передней панели консоли генератора 30. Устройство ввода 406 может содержать любое подходящее устройство, генерирующее сигналы, подходящие для программирования работы генератора 30, как далее показано на ФИГ. 9. Также, как показано на ФИГ. 1-3, провод 22 может содержать множество электрических проводников для подачи электрической энергии к положительному (+) и отрицательному (-) электродам ультразвукового преобразователя 50. Следует заметить, что в некоторых применениях ультразвуковой преобразователь 50 может называться «рукоятка» или «узел рукоятки», поскольку хирургический аппарат 100 хирургической системы 19 может быть сконфигурирован таким образом, что хирург может захватывать и манипулировать ультразвуковым преобразователем 50 во время проведения различных процедур и операций. Подходящий генератор 30 представляет собой генератор GEN 300, выпускаемый компанией «Ethicon Endo-Surgery, Inc.», которая находится в г. Цинциннати, штат Огайо, как описано в одном или более следующих патентах США, каждый из которых включен в настоящее описание путем отсылки: патент США №6,480,796 (Способ улучшения пуска ультразвуковой системы в условиях нулевой нагрузки); патент США №6,537,291 (Способ выявления ослабления лезвия в рукоятке, присоединенной к ультразвуковой хирургической системе); патент США №6,626,926 (Способ приведения в действие ультразвуковой системы для улучшения достижения резонансной частоты лезвия во время пуска); патент США №6,633,234 (Способ выявления поломки лезвия с использованием данных скорости и/или полного сопротивления); патент США №6,662,127 (Способ выявления наличия лезвия в ультразвуковой системе); патент США №6,678,621 (Контроль выходного смещения в рукоятке ультразвукового хирургического аппарата с использованием запаса регулировки по фазе); патент США №6,679,899 (Способ выявления поперечных вибраций в рукоятке ультразвукового аппарата); патент США №6,908,472 (Аппарат и способ изменения функций генератора ультразвуковой хирургической системы); патент США №6,977,495 (Электрическая цепь обнаружения для хирургической системы рукоятки); патент США №7,077,853 (Способ вычисления емкости преобразователя для определения температуры преобразователя); патент США №7,179,271 (Способ приведения в действие ультразвуковой системы для улучшения достижения резонансной частоты лезвия во время пуска); и патент США №7,273,483 (Аппарат и способ изменения функций генератора ультразвуковой хирургической системы).
В соответствии с описанными формами ультразвуковой генератор 30 создает электрический сигнал или управляющий сигнал, имеющий конкретное напряжение, силу тока и частоту, например, 55 500 циклов в секунду (Гц). Генератор 30 соединен с помощью провода 22 с узлом рукоятки 68, который содержит пьезокерамический элемент, формирующий ультразвуковой преобразователь 50. В ответ на переключение переключателя 312a на узле рукоятки 68 или педальном приводе 434, соединенном с генератором 30 с помощью другого провода, сигнал генератора подается на преобразователь 50, что приводит к продольным вибрациям его элементов. Преобразователь 50 прикреплен к узлу рукоятки 68 с помощь коннектора 300. После установки, преобразователь 50 становится акустически связанным с хирургическим лезвием 79 с помощью конструкции или волновода 80 (ФИГ. 2). Конструкции 80 и лезвию 79 далее сообщается вибрация ультразвуковой частоты, когда к преобразователю 50 подается управляющий сигнал. Конструкция 80 разработана так, чтобы резонировать при выбранной частоте, усиливая таким образом движение, изначально вызванное преобразователем 50. В одной форме, генератор 30 выполнен с возможностью генерировать конкретное напряжение, силу тока и/или частоту выходного сигнала, которые могут быть ступенчато изменены с высоким разрешением, точностью и повторяемостью.
Как показано на ФИГ. 4, в системах, используемых в настоящее время, традиционный осциллятор приводится в действие в момент времени 0, в результате чего получают ток 300, который увеличивается до желаемого заданного значения, равного 340 мА. Приблизительно на 2-й секунде применяется световая нагрузка, в результате чего повышается напряжение 310, мощность 320, полное сопротивление 330 и изменяется резонансная частота 340.
Как показано на ФИГ. 5, в системах, используемых в настоящее время, традиционный осциллятор приводится в действие в момент времени 0, в результате чего получают ток 300, который увеличивается до желаемого заданного значения, равного 340 мА. Приблизительно на 2-й секунде применяется увеличивающаяся нагрузка, в результате чего повышается напряжение 310, мощность 320, полное сопротивление 330 и изменяется резонансная частота 340. Приблизительно на 7-й секунде нагрузка уже поднята до точки, в которой осциллятор переходит в режим постоянной мощности, в котором дальнейшие увеличения нагрузки поддерживают мощность на уровне 35 Вт до тех пор, пока осциллятор работает в пределах напряжения источника электропитания. Ток 300, а следовательно, и смещение изменяются во время работы в режиме постоянной мощности. Приблизительно на 11,5 секунде нагрузка снижается до точки, в которой ток 300 снова принимает величину требуемого заданного значения, равного приблизительно 340 мА. Напряжение 310, мощность 320, полное сопротивление 330 и резонансная частота 340 изменяются вместе с нагрузкой.
Как показано также на ФИГ. 1-3, узел рукоятки 68 может представлять собой узел, состоящий из множества частей, адаптированный для того, чтобы изолировать оператора от вибраций акустического узла, содержащегося внутри ультразвукового преобразователя 50. Узел рукоятки 68 может иметь такую форму, чтобы пользователю было удобно удерживать его, но предполагается, что захват и манипуляции с настоящим ультразвуковым хирургическим аппаратом 100 выполняются принципиально с помощью узла, похожего на спусковой крючок, предоставляемого узлом рукоятки аппарата, как будет описано далее. Хотя на фигуре представлен узел рукоятки 68, состоящий из множества частей, узел рукоятки 68 может содержать единственный или единый компонент. Проксимальный конец ультразвукового хирургического аппарата 100 принимает в себя и прикреплен к дистальному концу ультразвукового преобразователя 50 путем введения преобразователя 50 в узел рукоятки 68. В одной форме ультразвуковой хирургический аппарат 100 может быть прикреплен к и удален из ультразвукового преобразователя 50 в виде узла. В других формах ультразвуковой хирургический аппарат 100 и ультразвуковой преобразователь 50 могут быть выполнены в виде единого узла. Ультразвуковой хирургический аппарат 100 может содержать узел рукоятки 68, содержащий сочленяющуюся с ней часть корпуса 69, часть корпуса 70 и модуль передачи 71. Если настоящий аппарат создается для применения в эндоскопии, его конструкция может иметь такие размеры, что наружный диаметр модуля передачи 71 равняется приблизительно 5,5 мм. Удлиненный модуль передачи 71 ультразвукового хирургического аппарата 100 продолжается перпендикулярно из узла рукоятки 68 аппарата. Модуль передачи 71 может быть выборочно повернут относительно узла рукоятки 68 с помощью поворотного регулятора 29, как более подробно описано далее. Узел рукоятки 68 может быть изготовлен из износостойкой пластмассы, такой как поликарбонат или жидкокристаллический полимер. Также предполагается, что узел рукоятки 68 в альтернативных вариантах может быть изготовлен из множества материалов, в том числе из других пластмасс, керамики или металлов.
Модуль передачи 71 может содержать внешний трубчатый элемент или внешнюю оболочку 72, внутренний трубчатый активирующий элемент 76, волновод 80 и концевой зажим 81, содержащий, например, лезвие 79, прихват 56 и одну или более подушек для скобок 58. Преобразователь 50 и модуль передачи 71 (содержащий или не содержащий концевой зажим 81) может называться ультразвуковой приводной системой. Как описано далее, внешняя оболочка 72, активирующий элемент 76 и волновод 80 или передающий стержень могут быть соединены вместе и вращаться как узел (вместе с ультразвуковым преобразователем 50) относительно узла рукоятки 68. Волновод 80, адаптированный для передачи ультразвуковой энергии от ультразвукового преобразователя 50 к лезвию 79, может быть гибким, полугибким или жестким. Волновод 80 также может быть выполнен с возможностью усиления механических вибраций, передаваемых по волноводу 80 к лезвию 79, что является широко известным в данной области техники. Волновод 80 может далее содержать элементы для управления нарастанием продольных вибраций вдоль волновода 80 и другие элементы для подгонки волновода 80 к резонансной частоте системы. В частности, волновод 80 может иметь любой подходящий размер поперечного сечения. Например, волновод 80 может иметь по существу однородное поперечное сечение, или волновод 80 может расширяться/сужаться конически на различных участках или может расширяться/сужаться конически по всей его длине. В одном выражении этой формы диаметр волновода составляет приблизительно 0,338 см (0,113 дюймов), что номинально снижает степень отклонения возле лезвия 79 таким образом, что зазор в проксимальной части концевого зажима 81 сводится к минимуму.
Лезвие 79 может быть выполнено заодно с волноводом 80 и сформировано как единый узел. В альтернативном выражении этой формы лезвие 79 может подсоединяться с помощью резьбового соединения, сварочного шва или других стыкующих механизмов. Дистальный конец лезвия 79 располагается вблизи анти-узла для подгонки акустического узла к предпочтительной резонансной частоте fo, когда акустический узел не испытывает нагрузки от ткани. Когда ультразвуковой преобразователь 50 подключен к источнику питания, дистальный конец лезвия 79 выполнен с возможностью продольно перемещаться в диапазоне, например, от приблизительно 10 до приблизительно 500 микрон двойной амплитуды, а предпочтительно в диапазоне от приблизительно 20 до приблизительно 200 микрон при предварительно заданной частоте вибрации fo, равной, например, 55500 Гц.
На ФИГ. 1-3 особенно ясно изображена одна форма захватывающего элемента 60, предназначенного для использования с настоящим ультразвуковым хирургическим аппаратом 100 и выполненного с возможностью совместного действия с лезвием 79. Захватывающий элемент 60 в сочетании с лезвием 79 обычно называется концевым зажимом 81, и захватывающий элемент 60 также обычно называется браншей. Захватывающий элемент 60 содержит шарнирный прихват 56, присоединенный к дистальному концу внешней оболочки 72 и активирующему элементу 76, в комбинации с подушкой для захвата ткани или подушкой для скобок 58. Прихват 56 шарнирно перемещается с помощью триггера 34, и концевой зажим 81 поворотно перемещается с помощью поворотного регулятора 29. Например, триггер 34 может передвигаться рукой врача в проксимальном направлении. Например, рукоятка 34 может шарнирно вращаться вокруг пальца шарнира 36. Движение в проксимальном направлении или шарнирное перемещение триггера 34 может вызвать перемещение в дистальном направлении хомута 301, механически сочлененного с трубчатым активирующим элементом 76. Движение в дистальном направлении трубчатого активирующего элемента может привести к шарнирному повороту прихвата 56, в результате чего он закроется в направлении лезвия 79. Дополнительные детали закрывающих механизмов для ультразвуковых хирургических устройств предоставлены в продолжение настоящего документа в отношении ФИГ. 93-95 и заявок на патент США №12/503,769, 12/503,770 и 12/503,766, каждая из которых во всей своей полноте включена в настоящее описание путем отсылки.
В одном выражении этой формы подушка для скобок 58 изготовлена из полимерного материала TEFLON® (название торговой марки компании «E.I. Du Pont de Nemours and Company»), обладающего низким коэффициентом трения, или из любого другого подходящего материала, обладающего низким коэффициентом трения. Подушка для скобок 58 устанавливается на прихвате 56 для того, чтобы работать вместе с лезвием 79, при этом шарнирное перемещение прихвата 56 располагает подушку для скобок 58 по существу параллельно и в контакте с лезвием 79, определяя, таким образом, область обработки ткани. При такой конструкции, ткань захватывается между подушкой для скобок 58 и лезвием 79. Из фигуры видно, что подушка для скобок 58 может шарнирно поворачиваться на негладкой поверхности, такой как поверхность с пилообразной конфигурацией шероховатости, для того чтобы улучшить захват ткани при совместной работе с лезвием 79. Пилообразная конфигурация шероховатости поверхности или зубья обеспечивают тянущее усилие, направленное в противоположную сторону от движения лезвия 79. Зубья также обеспечивают противоположное тянущее усилие лезвия 79 и зажимающее движение. Специалисту в данной области техники понятно, что пилообразная конфигурация шероховатости поверхности является лишь примером множества захватывающих ткань поверхностей, предотвращающих движение ткани относительно движения лезвия 79. Другие показательные примеры включают выпуклости, перекрестные узоры, резьбовые поверхности, опескоструенные или обработанные струей шариков поверхности.
Из-за синусоидального характера движения наибольшее отклонение или амплитуда движения находится на самой дистальной части лезвия 79, в то время как проксимальная часть области обработки ткани занимает порядка 50% амплитуды дистального конца. Во время операции ткань, находящаяся в проксимальной области концевого зажима 81, будет обезвоживаться и утончаться, а дистальная часть концевого зажима 81 будет рассекать ткань, находящуюся в дистальной области, позволяя таким образом обезвоженной и утонченной ткани, находящейся в проксимальной области, проскальзывать в дистальном направлении в более активную область концевого зажима 81 для завершения рассечения ткани.
На ФИГ. 3 показана силовая схема и отношение между активирующей силой FA (которую оказывает активирующий элемент 76) и рассекающей силой FT (измеряемой в середине оптимальной зоны обработки ткани).
FT=FA (X2/X1) (1),
где FA равняется предварительной нагрузке проксимальной пружины 94 (с меньшими потерями на трение), которая в одной форме составляет приблизительно 5,67 кг (12,5 фунтов), и FT равняется приблизительно 2,04 кг (4,5 фунтов).
FT измеряется в области взаимодействия прихвата и лезвия, где происходит оптимальная обработка ткани, как показано на метках ткани 61a и 61b. Метки ткани 61a, b вытравлены или приподняты на прихвате 56 для предоставления хирургу видимой метки таким образом, что хирург имеет четкое обозначение оптимальной области обработки ткани. Метки ткани 61a, b находятся на расстоянии приблизительно 7 мм друг от друга, предпочтительнее на расстоянии приблизительно 5 мм друг от друга.
На ФИГ. 9 показана одна форма приводной системы 32 генератора 30, который генерирует ультразвуковой электрический сигнал для приведения в действие ультразвукового преобразователя, также называемый управляющим сигналом. Приводная система 32 является гибкой и может создавать ультразвуковой электрический управляющий сигнал 416 при требуемой частоте и уровне мощности для приведения в действие ультразвукового преобразователя 50. В различных формах генератор 30 может содержать несколько отдельных функциональных элементов, таких как модули и/или блоки. Хотя определенные модули и/или блоки могут быть описаны путем примеров, понятно, что может использоваться большее и/или меньшее количество блоков, и такое использование все равно входит в объем описанных форм. Кроме того, хотя различные формы могут быть описаны в качестве модулей и/или блоков для упрощения описания, такие модули и/или блоки могут быть реализованы с помощью одного или более компонентов аппаратного обеспечения, например, процессоров, цифровых сигнальных процессоров (ЦСП), программируемых логических устройств (ПЛУ), специализированных интегральных схем (ИС), схем, реестров и/или компонентов программного обеспечения, например, программ, подпрограмм, логических устройств и/или комбинаций компонентов программного и аппаратного обеспечения.
В одной форме приводная система 32 генератора 30 может содержать одно или более встроенное приложение, реализованное в качестве встроенной программы, программного обеспечения, аппаратного обеспечения или любой комбинации вышеперечисленных компонентов. Приводная система 32 генератора 30 может содержать различные исполнительные модули, такие как программное обеспечение, программы, данные, драйвера, интерфейсы для прикладных программ (API-интерфейсы) и т.п. Встроенные программы могут храниться в энергонезависимой памяти (NVM), такой как постоянная память (ПЗУ) с побитовой маскировкой или флэш-память. В различных реализациях хранение встроенных программ в ПЗУ может сохранить флэш-память. Энергонезависимая память может содержать другие виды памяти, включая, например, программируемое ПЗУ (ППЗУ), стираемое программируемое ПЗУ (СППЗУ), электрически стираемое программируемое ПЗУ (ЭСППЗУ) или оперативное запоминающее устройство (ОЗУ) с автономным питанием, такое как динамическое ОЗУ (ДОЗУ), ДОЗУ с удвоенной скоростью передачи данных (DDRAM) и/или синхронное ДОЗУ (СДОЗУ).
В одной форме приводная система 32 генератора 30 содержит компонент аппаратного обеспечения, реализованный в качестве процессора 400 для выполнения команд программ, предназначенных для мониторинга различных измеряемых характеристик ультразвукового хирургического аппарата 100 (ФИГ. 1) и для генерирования скачкообразного выходного сигнала для приведения в действие ультразвукового преобразователя 50 в рабочих режимах разрезания и/или коагуляции. Специалисты в данной области определят, что генератор 30 и приводная система 32 могут содержать дополнительные компоненты или меньшее количество компонентов, а в настоящем документе для краткости и понятности изложения описана только упрощенная версия генератора 30 и приводной системы 32. В различных формах, как обсуждалось выше, компоненты аппаратного обеспечения могут быть реализованы в виде ЦСУ, ПЛУ, специализированных ИС, схем и/или реестров. В одной форме процессор 400 может быть выполнен с возможностью хранения и выполнения команд компьютерного программного обеспечения для генерирования ступенчатых выходных сигналов, предназначенных для приведения в действие различных компонентов ультразвукового хирургического аппарата 100, таких как преобразователь 50, концевой зажим 81 и/или лезвие 79.
В одной форме под управлением одной или более программ процессор 400 выполняет способы в соответствии с описанными формами для генерирования ступенчатой функции, сформированной ступенчатой волновой формой управляющих сигналов, содержащей силу тока (I), напряжение (V) и/или частоту (f) для различных периодов и интервалов времени (T). Ступенчатые волновые формы управляющих сигналов могут быть генерированы путем формирования кусочно-линейной комбинации постоянных функций на протяжении множества временных интервалов, созданных путем ступенчатой обработки управляющих сигналов генератора 30, например, выходной управляющий ток (I), напряжение (V) и/или частота (f). Временные интервалы или периоды (T) могут быть заранее заданы (например, зафиксированы и/или запрограммированы пользователем) или могут быть переменными. Переменные интервалы времени могут быть заданы путем установки управляющего сигнала на первое значение и поддержания управляющего сигнала на уровне этого значения до тех пор, пока не будет выявлено изменение отслеживаемой характеристики. Примерами отслеживаемых характеристик могут являться, например, полное сопротивление преобразователя, полное сопротивление ткани, нагрев ткани, рассечение ткани, коагуляция ткани и т.п. Ультразвуковыми управляющими сигналами, сгенерированными генератором 30, являются, без ограничения, ультразвуковые управляющие сигналы, способные возбудить работу ультразвукового преобразователя 50 в различных режимах вибрации, таких как, например, основной продольный режим и его гармоники, а также режимы изгибно-крутильных вибраций.
В одной форме исполняющие модули содержат одну или более алгоритмов ступенчатых функций 402, хранимых в памяти, которые при выполнении приводят к тому, что процессор 400 генерирует ступенчатую функцию, сформированную ступенчатой волновой формой управляющих сигналов, содержащих силу тока (I), напряжение (V) и/или частоту (f) для различных периодов и интервалов времени (T). Ступенчатые волновые формы управляющих сигналов могут быть сгенерированы путем формирования кусочно-линейной комбинации постоянных функций на протяжении двух или более интервалов времени, созданных путем ступенчатой обработки выходного управляющего тока (I), напряжения (V) и/или частоты (f) генератора 30. Управляющие сигналы могут генерироваться либо для предварительно заданных интервалов времени или периодов времени (T), либо для переменных интервалов или периодов времени в соответствии с одним или более ступенчатыми выходными алгоритмами 402. Под управлением процессора 400 генератор 30 выполняет ступенчатую обработку (например, ступенчатое увеличение или уменьшение) силы тока (I), напряжения (V) и/или частоты (f) в большую или меньшую сторону с конкретным разрешением для предварительно определенного периода (T) или до выявления заранее заданного условия, такого как изменение отслеживаемой характеристики (например, полное сопротивление преобразователя, полное сопротивление ткани). Шаги могут изменяться с запрограммированными инкрементами или декрементами. Если требуются другие шаги, генератор 30 может увеличить или уменьшить шаг, адаптируясь к измеряемым характеристикам системы.
Во время работы пользователь может программировать работу генератора 30, используя устройство ввода 406, расположенное на консоли передней панели генератора 30. Устройство ввода 406 может содержать любое подходящее устройство, генерирующее сигналы 408, которые могут быть переданы процессору 400 для управления работой генератора 30. В различных формах устройство ввода 406 содержит кнопки, переключатели, дисковые переключатели, клавиатуру, кнопочную панель, сенсорный монитор, указывающее устройство, удаленное подключение к выделенному компьютеру или к компьютеру общего назначения. В других формах устройство ввода 406 может содержать подходящий интерфейс. Таким образом, с помощью устройства ввода 406 пользователь может настроить или запрограммировать силу тока (I), напряжение (V), частоту (f) и/или период (T) для программирования ступенчатой выходной функции генератора 30. После этого процессор 400 отображает выбранный уровень мощности, посылая сигнал по линии 410 к выходному индикатору 412.
В различных формах выходной индикатор 412 может предоставлять хирургу визуальную, звуковую и/или тактильную обратную связь для информирования его о состоянии хирургической процедуры, таком как, например, завершение разрезания и коагуляции ткани, определяемое на основании измеренных характеристик ультразвукового хирургического аппарата 100, например, полного сопротивления преобразователя, сопротивления ткани или других измерений, о которых пойдет речь далее. В качестве примерного, но не отграничивающего варианта, визуальная обратная связь содержит любой тип визуальной индикации, включая лампы накаливания или светодиоды, графический пользовательский интерфейс, дисплей, аналоговый индикатор, цифровой индикатор, гистограммный дисплей, цифровой буквенно-числовой дисплей. В качестве примерного, но не отграничивающего варианта, звуковая обратная связь содержит любой тип гудка, мелодию, генерированную компьютером, компьютеризованная речь, голосовой пользовательский интерфейс (ГПИ), предназначенный для взаимодействия с компьютером посредством голосовой/речевой платформы. В качестве примерного, но не отграничивающего варианта, тактильная обратная связь содержит любой тип вибрационной обратной связи, предоставляемый через узел рукоятки 68 корпуса аппарата.
В одной форме процессор 400 может быть сконфигурирован или запрограммирован на генерирование цифрового токового сигнала 414 и цифрового сигнала частоты 418. Сигналы 414, 418 передаются на схему цифрового синтезатора прямого синтеза (ЦСПС) 420 для регулировки амплитуды и частоты (f) токового выходного сигнала 416, поступающего в преобразователь 50. Выходные параметры схемы ЦСПС 420 передаются на усилитель 422, выходные параметры которого передаются на трансформатор 424. Выходные параметры трансформатора 424 представляют собой сигнал 416, переданный к ультразвуковому преобразователю 50, соединенному с лезвием 79 с помощью волновода 80 (ФИГ. 2).
В одной форме генератор 30 содержит один или более измерительных модулей или компонентов, которые могут быть выполнены с возможностью отслеживания измеряемых характеристик ультразвукового хирургического аппарата 100 (ФИГ. 1). В проиллюстрированной форме процессор 400 может использоваться для мониторинга и вычисления характеристик системы. Как видно, процессор 400 измеряет полное сопротивление Z преобразователя 50, отслеживая силу тока, подаваемую к преобразователю 50, и напряжение, подаваемое к преобразователю 50. В одной форме схема чувствительности по току 426 применяется для контроля тока, протекающего через преобразователь 50, и схема чувствительности по напряжению 428 применяется для контроля выходного напряжения, передаваемого на преобразователь 50. Эти сигналы могут воздействовать на преобразователь аналогового сигнала в цифровой 432 (АЦП) посредством аналоговой схемы канального уплотнителя 430 или узла схемы переключения. Аналоговый канальный уплотнитель 430 направляет подходящий налоговый сигнал к АЦП 432 для его преобразования. В других формах вместо схемы канального уплотнителя 430 для каждой измеряемой характеристики может применяться множество АЦП 432. Процессор 400 получает цифровой выходной сигнал 433 от АЦП 432 и вычисляет полное сопротивление Z преобразователя, основываясь на измеренных значениях силы тока и напряжения. Процессор 400 регулирует выходящий управляющий сигнал 416 таким образом, что он может генерировать необходимую кривую зависимости мощности от нагрузки. В соответствии с запрограммированными алгоритмами 402 ступенчатой функции процессор 400 может ступенчатым образом обрабатывать управляющий сигнал 416, например, ток или частоту, с любым подходящим инкрементом или декрементом в ответ на полное сопротивление Z преобразователя.
Чтобы вызвать фактическую вибрацию хирургического лезвия 79, например, чтобы привести в действие лезвие 79, пользователь активирует педальный переключатель 434 (ФИГ. 1) или переключатель 312a (ФИГ. 1) на узле рукоятки 68. Такая активация подает управляющий сигнал 416 преобразователю 50, исходя из запрограммированных значений силы тока (I), частоты (f) и соответствующих периодов времени (T). По окончании заранее заданного периода времени (T) или переменного периода времени, основываясь на измеряемых характеристиках системы, таких как изменения полного сопротивления Z преобразователя 50, процессор 400 изменяет шаг выходного тока или шаг частоты в соответствии с запрограммированными значениями. Выходной индикатор 412 сообщает пользователю конкретное состояние процесса.
Запрограммированная работа генератора 30 может быть далее проиллюстрирована со ссылкой на ФИГ. 6, 7 и 8, на которых показаны графические представления силы тока 300, напряжения 310, мощности 320, полного сопротивления 330 и частоты 340 для генератора 30 в ненагруженном состоянии, в слабо нагруженном состоянии и в сильно нагруженном состоянии, соответственно. На ФИГ. 6 дано графическое представление волновых форм силы тока 300, напряжения 310, мощности 320, полного сопротивления 330 и частоты 340 одной формы генератора 30 в ненагруженном состоянии. В показанной форме выходной ток 300 генератора 30 обработан ступенчатым образом. Как показано на ФИГ. 6, генератор 30 изначально приводится в действие приблизительно в момент времени 0, в результате чего ток 300 возрастает до первого заданного значения I1, равного приблизительно 100 мА. Ток 300 поддерживается на уровне первого заданного значения I1 на протяжении первого периода T1. В конце первого периода T1, например, приблизительно равного 1 секунде для проиллюстрированной формы, заданное значение тока 300 I1 изменяется, например, обрабатывается ступенчатым образом, с помощью генератора 30 в соответствии с программным обеспечением, например, в соответствии с алгоритмом(-ами) 402 ступенчатой функции, на второе заданное значение I2, равное приблизительно 175 мА на второй период времени T2, например, приблизительно равный 2 секундам для проиллюстрированной формы. В конце второго периода T2, например, приблизительно на 3 секунды для проиллюстрированной формы, программное обеспечение генератора 30 изменяет силу тока 300 на третье заданное значение I3, равное приблизительно 350 мА. Напряжение 310, сила тока 300, мощность 320 и частота реагируют очень незначительно, поскольку нагрузка в системе отсутствует.
На ФИГ. 7 дано графическое представление волновых форм силы тока 300, напряжения 310, мощности 320, полного сопротивления 330 и частоты 340 одной формы генератора 30 в незначительно нагруженном состоянии. Как показано на ФИГ. 7, генератор 30 приводится в действие приблизительно в момент времени 0, в результате чего ток 300 возрастает до первого заданного значения тока 300 I1, равного приблизительно 100 мА. Через приблизительно 1 секунду заданное значение тока 300 изменяется программным обеспечением внутри генератора 30 на I2, равное приблизительно 175 мА, а затем снова приблизительно через 3 секунды генератор 30 изменяет заданное значение тока 300 на I3, равное приблизительно 350 мА. Видно, что напряжение 310, сила тока 300, мощность 320 и частота 340 реагируют на незначительную нагрузку аналогичным образом, как это показано на ФИГ. 4.
На ФИГ. 8 дано графическое представление волновых форм силы тока 300, напряжения 310, мощности 320, полного сопротивления 330 и частоты 340 одной формы генератора 30 в сильно нагруженном состоянии. Как показано на ФИГ. 8, генератор 30 приводится в действие приблизительно в момент времени 0, в результате чего ток 300 возрастает до первого заданного значения I1, равного приблизительно 100 мА. Через приблизительно 1 секунду заданное значение тока 300 изменяется программным обеспечением внутри генератора 30 на I2, равное приблизительно 175 мА, а затем снова приблизительно через 3 секунды генератор 30 изменяет заданное значение тока 300 на I3, равное приблизительно 350 мА. Видно, что напряжение 310, сила тока 300, мощность 320 и частота 340 реагируют на сильную нагрузку аналогичным образом, как это показано на ФИГ. 5.
Специалистам в данной области понятно, что заданные значения ступенчатой функции тока 300 (например, I1, I2, I3) и периоды или интервалы времени (например, T1, T2) с длительностью, показанной на ФИГ. 6-8 для каждого заданного значения ступенчатой функции, не ограничены величинами, описанными в этом документе и могут быть отрегулированы до любых подходящих величин, которые могут потребоваться для заданного множества хирургических процедур. В зависимости от требований заданного множества конструктивных характеристик или ограничений производительности могут быть выбраны дополнительные или меньшие заданные значения или длительность периодов. Как описано выше, периоды могут быть заранее заданы путем программирования или могут быть переменными и основываться на измеряемых характеристиках системы. В этом контексте такие формы не ограничены. Например, в определенных формах амплитуды (заданные значения) последовательных импульсов могут повышаться, снижаться или оставаться одинаковыми. Например, в определенных формах амплитуды последовательных импульсов могут быть равны. Также, в определенных формах интервалы или периоды времени между импульсами могут принимать любое подходящее значение, включая например, доли секунды, минуты, часы и т.д. В одной примерной форме, интервал или периоды времени между импульсами могут составлять 55 секунд.
После описания деталей работы различных форм хирургической системы 19 можно переходить к дальнейшему описанию работы вышеупомянутой хирургической системы 19 в рамках процесса разрезания и коагуляции кровеносного сосуда, применяющего хирургический аппарат, содержащий устройство ввода 406 и возможности измерения полного сопротивления преобразователя, как описано со ссылкой на ФИГ. 9. Несмотря на то, что конкретный процесс описан в связи с деталями работы, можно понять, что такой процесс предоставляет только пример того, как можно с помощью хирургической системы 19 реализовать общие функциональные возможности, описанные в этом документе. Кроме того, данный процесс не обязательно должен выполняться в порядке, представленном в настоящем документе, если не указано иное. Как описано выше, устройство ввода 406 может быть использовано для программирования ступенчатого выходного сигнала (например, ток, напряжение, частота) для ультразвукового преобразователя 50/узла лезвия 79.
Таким образом, как показано на ФИГ. 1-3 и 6-9, один способ герметизации сосуда подразумевает отделение и перемещение внутреннего мышечного слоя сосуда в противоположном направлении от адвентициального слоя до воздействия стандартной ультразвуковой энергии для рассечения и герметизации сосуда. Хотя традиционные способы достигают такого отделения путем увеличения силы, воздействующей на захватывающий элемент 60, в настоящем описании раскрыто альтернативное устройство и способ разрезания и коагуляции ткани, который не основывается только на силе захвата. Для того чтобы более эффективно отделять слои ткани сосуда генератор 30, например, может быть запрограммирован для воздействия ступенчатой функцией частоты на ультразвуковой преобразователь 50, чтобы механически смещать лезвие 79 в ходе множества этапов в соответствии с указанной ступенчатой функцией. В одной форме ступенчатая функция частоты может быть запрограммирована посредством пользовательского интерфейса 406, при этом пользователь может выбрать программу ступенчатой частоты, частоту (f) для каждого шага и соответствующий период времени (T), имеющий длительность для каждого шага, для которого ультразвуковой преобразователь 50 будет приводиться в возбужденное состояние. Пользователь может запрограммировать весь операционный цикл путем установки множества частот для множества периодов с целью выполнения различных хирургических процедур.
В определенных формах амплитуды последовательных импульсов или шагов могут повышаться, снижаться или оставаться одинаковыми. Например, в определенных формах амплитуды последовательных импульсов могут быть равны. Также, в определенных формах периоды времени между импульсами могут принимать любое подходящее значение, включая, например, доли секунды, минуты, часы и т.д. В одной примерной форме периоды времени между импульсами могут составлять 55 секунд.
В одной форме первая ультразвуковая частота может быть изначально установлена для того, чтобы механически отделять слой мышечной ткани сосуда до воздействия второй ультразвуковой частоты, применяемой для разрезания и герметизации сосуда. В качестве примерного, но не ограничивающего варианта, в соответствии с одной реализацией программы, изначально генератор 30 программируется на подачу первой управляющей частоты f1 на протяжении первого периода времени T1 (например, менее приблизительно 1 секунды), причем первая частота f1 находится в значимой степени вне резонанса, например, fo/2, 2fo или другой структурной резонансной частоты, где fo является резонансной частотой (например, 55,5 кГц). Первая частота f1 предоставляет низкий уровень воздействия механической вибрации на лезвие 79, которое в сочетании с силой захвата механически отделяет (субтерапевтическое воздействие) слой мышечной ткани сосуда, не вызывая значительного нагрева, который как правило имеет место при резонансе. После первого периода T1 генератор 30 запрограммирован на автоматическое переключение управляющей частоты на резонансную частоту fo на период второго интервала T2 с целью рассечения и герметизации сосуда. Длительность второго периода T2 может быть запрограммирована или может быть определена длительностью времени, которую фактически занимает разрезание и уплотнение сосуда в соответствии с выбором пользователя или на основании измеряемых системных характеристик, таких как полное сопротивление Z преобразователя, как более подробно описано далее.
В одной форме, процесс рассечения ткани/сосуда (например, отделение мышечного слоя сосуда от адвентициального слоя и рассечение/уплотнение сосуда) может быть автоматизировано путем контроля характеристик полного сопротивления Z преобразователя 50 для определения выполнения рассечения ткани/сосуда. Полное сопротивление Z может быть сопоставлено с рассечением мышечного слоя и с рассечением/уплотнением сосуда для предоставления триггера процессора 400 для генерирования ступенчатого частотного и/или токового выходного сигнала. Как описано выше со ссылкой на ФИГ. 9, полное сопротивление Z преобразователя 50 может быть вычислено процессором 400 на основании силы тока, протекающего через преобразователь 50, и напряжения, воздействующего на преобразователь 50, в то время, когда лезвие 79 находится под разными нагрузками. Поскольку полное сопротивление Z преобразователя 50 пропорционально нагрузке, воздействующей на лезвие 79, по мере увеличения нагрузки на лезвие 79 полное сопротивление Z преобразователя 50 возрастает, и по мере снижения нагрузки на лезвие 79 полное сопротивление Z преобразователя 50 понижается. Следовательно, полное сопротивление Z преобразователя 50 можно отслеживать для определения отделения внутреннего слоя мышечной ткани сосуда от адвентициального слоя, а также для определения завершения рассечения и герметизации сосуда.
В одной форме ультразвуковой хирургический аппарат 110 может эксплуатироваться в соответствии с запрограммированным алгоритмом ступенчатой функции, который реагирует на полное сопротивление Z преобразователя. В одной форме выходной сигнал ступенчатой функции частоты может быть инициирован на основании сравнения полного сопротивления Z преобразователя и одного или более пределов, соотнесенными с нагрузками ткани на лезвие 79. Когда переходы полного сопротивления Z преобразователя больше или меньше (например, пересечения) предела, процессор 400 передает цифровой частотный сигнал 418 в схему ЦСПС 420 для изменения частоты управляющего сигнала 416 на предопределенный шаг в соответствии с алгоритмом (алгоритмами) 402 ступенчатой функции, который реагирует на полное сопротивление Z преобразователя. При эксплуатации лезвие 79 сначала располагается в области обработки ткани. Процессор 400 передает первый цифровой частотный сигнал 418 для установки первой управляющей частоты f1, которая находится вне резонанса (например, fo/2, 2fo или другой конструкционной резонансной частоты, где fo - резонансная частота). Управляющий сигнал 416 передается на преобразователь 50 в ответ на приведение в действие переключателя 312a на узле рукоятки 68 или педального привода 434. На протяжении этого периода ультразвуковой преобразователь 50 механическим образом приводит лезвие 79 в действие с первой управляющей частотой f1. Для облегчения этого процесса к захватывающему элементу 60 и лезвию 79 может быть приложена сила или нагрузка. На протяжении этого периода процессор 400 отслеживает полное сопротивление Z преобразователя до тех пор, пока нагрузка на лезвие 79 не изменится и полное сопротивление Z преобразователя не пересечет заранее заданный предел для обозначения завершения рассечения слоя ткани. Затем процессор 400 передает второй цифровой частотный сигнал 418 для установки второй управляющей частоты f2, например, резонансной частоты fo или другой частоты, подходящей для рассечения, коагуляции и уплотнения ткани. После этого между захватывающим элементом 60 и лезвием 79 зажимается другой участок ткани (например, сосуд). Преобразователь 50 в это время запитывается управляющим сигналом 416, который устанавливает вторую управляющую частоту f2, посредством приведения в действие педального привода 434 или переключателя 312a на узле рукоятки 68. Специалисты в данной области определят, что выходной сигнал управляющего тока (I) может также быть обработан ступенчатым образом, как показано на ФИГ. 6-8, исходя из полного сопротивления Z преобразователя.
В соответствии с одним алгоритмом 402 ступенчатой функции, процессор 400 изначально устанавливает первую управляющую частоту f1, которая в значимой степени находится вне резонанса, чтобы отделить внутренний мышечный слой сосуда от адвентициального слоя. На протяжении этого периода работы, процессор 400 отслеживает полное сопротивление Z преобразователя для определения момента, когда внутренний мышечный слой будет рассечен или отделен от адвентициального слоя. Поскольку полное сопротивление Z преобразователя соотносится с нагрузкой, воздействующей на лезвие 79, например, разрезание большего количества ткани снижает нагрузку на лезвие 79 и полное сопротивление Z преобразователя. Рассечение внутреннего мышечного слоя определяется тогда, когда полное сопротивление Z преобразователя опускается ниже предопределенного предела. Когда изменение полного сопротивления Z преобразователя сигнализирует о том, что сосуд отделен от внутреннего мышечного слоя, процессор 400 устанавливает управляющую частоту на резонансную частоту fo. После этого между лезвием 79 и захватывающим элементом 60 сосуд зажимается, и для рассечения и герметизации сосуда посредством активации либо педального привода, либо переключателя на узле рукоятки 68 приводится в действие преобразователь 50. В одной форме, изменение полного сопротивления Z, начиная с момента контактирования с тканью и до момента перед непосредственным рассечением и уплотнением мышечного слоя, может приблизительно в 1,5-4 раза превышать измерения базового полного сопротивления.
На ФИГ. 10 представлена одна форма хирургической системы 190, содержащей ультразвуковой хирургический аппарат 120 и генератор 500, содержащий модуль сопротивления ткани 502. Хотя в описываемой форме генератор 500 изображен отдельно от хирургического аппарата 120, в одной форме генератор 500 может быть интегрирован в хирургический аппарат 120 для образования единой хирургической системы 190. В одной форме генератор 500 может быть выполнен с возможностью мониторинга полного электрического сопротивления ткани Zt и контроля характеристик времени и уровня мощности, основываясь на полном сопротивлении ткани Zt. В одной форме, полное сопротивление ткани Zt может быть определено путем воздействия на ткань субтерапевтическим радиочастотным (РЧ) сигналом и измерения силы тока, проходящего через ткань с помощью возвратного электрода, установленного на захватывающем элементе 60. В форме, проиллюстрированной на ФИГ. 10, часть концевого зажима 810 хирургической системы 190 содержит узел прихвата 451, соединенный с дистальным концом внешней оболочки 72. Лезвие 79 образует первый (например, питающий) электрод, а узел прихвата 451 содержит проводящую электричество часть, которая образует второй (например, возвратный) электрод. Модуль сопротивления ткани 502 соединяется с лезвием 79 и узлом прихвата 451 с помощью подходящей проводящей среды, такой как провод 504. Провод 504 содержит множество электрических проводников для подачи напряжения к ткани и предоставления возвратного пути для тока, протекающего через ткань обратно к модулю полного сопротивления 502. В различных формах модуль сопротивления ткани 502 может быть выполнен в виде единого блока с генератором 500 или может быть предоставлен в виде отдельной схемы, соединенной с генератором 500 (для демонстрации этого варианта приведен вид в полуразрезе). Генератор 500 по существу аналогичен генератору 30 с добавленным элементом модуля сопротивления ткани 502.
На ФИГ. 11 показана одна форма приводной системы 321 генератора 500, содержащая модуль сопротивления ткани 502. Приводная система 321 генерирует ультразвуковой электрический управляющий сигнал 416 для приведения в действие ультразвукового преобразователя 50. В одной форме, модуль сопротивления ткани 502 может быть выполнен с возможностью измерения полного сопротивления Zt ткани, зажатой между лезвием 79 и узлом прихвата 451. Модуль сопротивления ткани 502 содержит РЧ-осциллятор 506, схему считывания напряжения 508 и схему считывания тока 510. Схемы считывания напряжения и тока 508, 510 реагируют на напряжение vrf, поданное на лезвийный электрод 79, и РЧ ток irf, протекающий через лезвийный электрод 79, ткань и проводящую часть узла прихвата 451. Считанные значения напряжения vrf и тока irf преобразуются в цифровую форму с помощью АЦП 432 посредством аналогового канального уплотнителя 430. Процессор 400 получает оцифрованный выходной сигнал 433 от АЦП 432 и определяет полное сопротивление ткани Zt путем вычисления отношения РЧ напряжения vrf к силе тока irf, измеренных с помощью схемы считывания напряжения 508 и схемы считывания тока 510. В одной форме рассечение внутреннего мышечного слоя и ткани может быть выявлено путем считывания значения сопротивления ткани Zt. Соответственно, определение сопротивления ткани Zt может быть интегрировано в автоматизированный процесс для отделения внутреннего мышечного слоя от внешнего адвентициального слоя до рассечения ткани, не вызывая значительного нагрева, который обычно имеет место при резонансе.
На ФИГ. 12 показана одна форма узла прихвата 451, который может быть применен с хирургической системой 190 (ФИГ. 10). В изображенной форме узел прихвата 451 содержит проводящий кожух 472, закрепленный на основании 449. Проводящий кожух 472 представляет собой проводящую электричество часть узла прихвата 451, который образует второй, например, возвратный электрод. В одной реализации прихват 56 (ФИГ. 3) может образовывать основание 449, к которому крепится проводящий кожух 472. В различных формах проводящий кожух 472 может содержать центральную часть 473 и по меньшей мере одну продолжающуюся вниз боковую стенку 474, которая может продолжаться ниже нижней поверхности 475 основания 449. В проиллюстрированной форме проводящий кожух 472 имеет две боковых стенки 474, продолжающиеся вниз с противоположных сторон основания 449. В других формах центральная часть 473 может содержать по меньшей мере одно отверстие 476, которое может быть выполнено с возможностью принимать выступ 477, продолжающийся из основания 449. В таких формах выступы 477 могут быть запрессованы в отверстия 476 для крепления проводящего кожуха 472 к основанию 449. В других формах выступы 477 могут деформироваться после вставки в отверстия 476. В различных формах для крепления проводящего кожуха 472 к основанию 449 могут использоваться крепежные элементы.
В различных формах узел прихвата 451 может содержать не проводящий электричество или изолирующий материал, такой как пластмасса и/или резина, например, расположенный между проводящим кожухом 472 и основанием 449. Проводящий электричество материал может препятствовать протеканию тока или короткому замыканию между проводящим кожухом 472 и основанием 449. В различных формах основание 449 может содержать по меньшей мере одно отверстие 478, которое может быть выполнено с возможностью приема пальца шарнира (не показан на фигуре). Палец шарнира может быть выполнен с возможностью шарнирного крепления основания 449 к оболочке 72 (ФИГ. 10), например, таким образом, что узел прихвата 451 может быть повернут между открытым и закрытым положениями относительно оболочки 72. В проиллюстрированной форме основание 449 содержит два отверстия 478, расположенных на противоположных сторонах основания 449. В одной форме палец шарнира может быть выполнен из или может содержать не проводящий электричество или изолирующий материал, такой как пластмасса и/или резина, например, который может быть выполнен с возможностью препятствовать протеканию тока в оболочку 72 даже тогда, когда основание 449 находится в электрическом контакте с проводящим кожухом 472, например. Могут применяться дополнительные узлы прихвата, содержащие различные виды электродов. Примеры таких узлов прихвата описаны в заявках на патент США, принадлежащих одному и тому же заявителю, сер. №12/503,769, 12/503,770 и 12/503,766, каждая из которых во всей своей полноте включена в настоящее описание путем отсылки.
На ФИГ. 13 представлен схематический график модуля сопротивления ткани 502, соединенного с лезвием 79 и узлом прихвата 415, между которыми размещена ткань 514. Как показано на ФИГ. 10-13, генератор 500 содержит модуль сопротивления ткани 502, выполненный для мониторинга сопротивления ткани 514 (Zt), расположенной между лезвием 79 и узлом прихвата 451 во время процесса рассечения ткани. Модуль сопротивления ткани 502 соединен с ультразвуковым хирургическим аппаратом 120 с помощью провода 504. Провод 504 содержит первый «питающий» проводник 504a, соединенный с лезвием 79 (например, положительный [+] электрод), и второй «возвратный» проводник 504b, соединенный с проводящим кожухом 472 (например, отрицательный [-] электрод) узла прихвата 451. В одной форме, РЧ напряжение vrf прикладывается к лезвию 79 для того, чтобы вызвать протекание РЧ тока irf через ткань 514. Второй проводник 504b обеспечивает возвратный путь тока irf назад к модулю сопротивления ткани 502. Дистальный конец возвратного проводника 504b соединен с проводящим кожухом 472 таким образом, что ток irf может протекать от лезвия 79, через ткань 514, расположенную между проводящим кожухом 472 и лезвием 79, и проводящий кожух 472 к возвратному проводнику 504b. Модуль полного сопротивления 502 соединяется в схему с помощью первого и второго проводников 504a, b. В одной форме РЧ энергия может воздействовать на лезвие 79 через ультразвуковой преобразователь 50 и волновод 80 (ФИГ. 2). Стоит отметить, что РЧ энергия, воздействующая на ткань 514 с целью измерения сопротивления ткани Zt, представляет собой низкоуровневый субтерапевтический сигнал, который практически или вообще не участвует в обработке ткани 514.
После описания деталей работы различных форм хирургической системы 190 можно переходить к дальнейшему описанию работы вышеупомянутой хирургической системы 190 в рамках процесса разрезания и коагуляции кровеносного сосуда, применяющего хирургический аппарат, содержащий устройство ввода 406 и модуль сопротивления ткани 502, как описано со ссылкой на ФИГ. 10-13. Несмотря на то, что конкретный процесс описан в связи с деталями работы, можно понять, что такой процесс предоставляет только пример того, как можно с помощью хирургической системы 190 реализовать общие функциональные возможности, описанные в этом документе. Кроме того, данный процесс не обязательно должен выполняться в порядке, представленном в настоящем документе, если не указано иное. Как описано выше, устройство ввода 406 может быть использовано для программирования ступенчатого выходного сигнала (например, ток, напряжение, частота) для ультразвукового преобразователя 50/узла лезвия 79.
В одной форме первый проводник или провод могут быть соединены с внешней оболочкой 72 аппарата 120, и второй проводник или провод могут быть соединены с лезвием 79/преобразователем 50. По характеру конструкции, лезвие 79 и преобразователь 50 электрически изолированы от внешней оболочки 72, также как и другие элементы приводного механизма для аппарата 120, в том числе основание 449 и внутренняя оболочка 76. Внешняя оболочка 79 и другие элементы приводного механизма, включая основание 449 и внутреннюю оболочку 76, вместе составляют электрически непрерывную конструкцию, т.е. все элементы являются металлическими и контактируют друг с другом. Следовательно, подключая первый проводник к внешней оболочке 72, и второй проводник к лезвию 79 или преобразователю 50 таким образом, что между этими двумя проводящими путями размещается ткань, система может отслеживать полное электрическое сопротивление ткани до тех пор, пока ткань контактирует с лезвием 79 и основанием 449. Для облегчения контакта само основание 449 может содержать элементы, выступающие наружу и, возможно, вниз, которые обеспечивают контакт с тканью, одновременно эффективно интегрируя проводящий кожух 472 в основание 449.
В одной форме ультразвуковой хирургический аппарат 120 может эксплуатироваться в соответствии с запрограммированным алгоритмом 402 ступенчатой функции, реагирующим на полное сопротивление ткани Zt. В одной форме выходной сигнал ступенчатой функции частоты может быть инициирован на основании сравнения сопротивления ткани Zt и заранее заданных пороговых значений, соотнесенных с различными состояниями ткани (например, обезвоживание, рассечение, герметизация). Когда переходы полного сопротивления Zt ткани больше или меньше (например, пересечения) предела, процессор 400 передает цифровой частотный сигнал 418 в схему ЦСПС 420 для изменения частоты ультразвукового осциллятора на предопределенный шаг в соответствии с алгоритмом 402 ступенчатой функции, который реагирует на полное сопротивление Z t ткани.
При эксплуатации лезвие 79 располагается в области обработки ткани. Ткань 514 захватывается между лезвием 79 и узлом прихвата 451 таким образом, что лезвие 79 и проводящий кожух 472 входят в электрический контакт с тканью 514. Процессор 400 передает первый цифровой частотный сигнал 418 для установки первой управляющей частоты f1, которая находится вне резонанса (например, fo/2, 2fo или другой конструкционной резонансной частоты, где fo - резонансная частота). Лезвие 79 запитывается электричеством от низкоуровневого субтерапевтического РЧ напряжения vrf, подаваемого модулем сопротивления ткани 502. Управляющий сигнал 416 подается на преобразователь 50/лезвие 79 в ответ на приведение в действие переключателя 312a на узле рукоятки 68 или педального переключателя 434 до тех пор, пока полное сопротивление ткани Zt не изменится на заранее заданную величину. Затем сила или нагрузка прикладывается к узлу прихвата 451 и лезвию 79. На протяжении этого периода ультразвуковой преобразователь 50 механическим образом приводит в действие лезвие 79 с первой управляющей частотой f1, и, в результате, ткань 514 начинает обезвоживаться под действием ультразвука, прикладываемого между лезвием 79 и одной или более подушками для скобок 58 узла прихвата 451, вызывая повышение сопротивления ткани Zt. В конечном итоге, когда ткань рассечена действием ультразвука и приложенной силы, полное сопротивление ткани Zt становится очень высоким или бесконечным, поскольку ткань полностью разрушена таким образом, что между лезвием 79 и проводящим кожухом 472 не остается какого-либо проводящего пути. Специалистам в данной области понятно, что выходной сигнал управляющего тока (I) может также быть обработан ступенчатым образом, как показано на ФИГ. 6-8, исходя из сопротивления ткани Zt.
В одной форме полное сопротивление ткани Zt может отслеживаться модулем полного сопротивления 502 в соответствии со следующей процедурой. Измеряемый РЧ ток i1 передается по первому питающему проводнику 504a к лезвию 79 через ткань 514 и обратно к модулю полного сопротивления 502 через проводящий кожух 472 и второй проводник 504b. Когда ткань 514 обезвожена и разрезана ультразвуковым действием лезвия 79, действующим в направлении одной или более подушек для скобок 58, полное сопротивление ткани 514 повышается, и, следовательно, ток i1 в возвратном пути, т.е., во втором проводнике 504b, понижается. Модуль полного сопротивления 502 измеряет полное сопротивление ткани Zt и передает сигнал о нем в АЦП 432, чей выходной сигнал 433 передается на процессор 400. Процессор 400 вычисляет полное сопротивление ткани Zt, основываясь на измеренных значениях vrf и irf. Процессор 400 ступенчатым образом обрабатывает частоту с любым подходящим инкрементом или декрементом в ответ на изменение сопротивления ткани Zt. Процессор 400 контролирует управляющие сигналы 416 и может вносить любые необходимые корректировки в амплитуду и частоту в ответ на полное сопротивление ткани Zt. В одной форме, процессор 400 прерывать управляющий сигнал 416, когда полное сопротивление ткани Zt достигает предопределенной величины.
Таким разом, в качестве примерного, но не ограничивающего варианта, в одной форме, ультразвуковой хирургический аппарат 120 может эксплуатироваться в соответствии с запрограммированным алгоритмом ступенчатого выходного сигнала для отделения внутреннего мышечного слоя сосуда от адвентициального слоя до рассечения и герметизации сосуда. Как описано выше, в соответствии с одним алгоритмом ступенчатой функции процессор 400 изначально устанавливает первую управляющую частоту f1, которая в значимой степени находится вне резонанса. Преобразователь 50 приводится в действие для отделения внутреннего мышечного слоя сосуда от адвентициального слоя, и модуль сопротивления ткани 502 подает сигнал субтерапевтического РЧ напряжения vrf на лезвие 79. На протяжении этого периода T1 работы процессор 400 отслеживает полное сопротивление Zt ткани для определения момента, когда внутренний мышечный слой будет рассечен или отделен от адвентициального слоя. Полное сопротивление ткани Zt соотносится с нагрузкой, воздействующей на лезвие 79, например, когда ткань становится обезвоженной, или когда ткань рассечена, полное сопротивление ткани Zt становится чрезвычайно высоким или бесконечным. Изменение сопротивления ткани Zt свидетельствует о том, что сосуд был отделен или отсечен от внутреннего мышечного слоя, и генератор 500 деактивируется на второй промежуток времени T2. Процессор 400 затем устанавливает управляющую частоту на резонансную частоту fo. После этого между лезвием 79 и узлом прихвата 451 зажимается сосуд, и преобразователь 50 снова приводится в действие для рассечения и герметизации сосуда. Постоянный мониторинг сопротивления ткани Zt позволяет определить, когда сосуд будет рассечен и уплотнен. Также, полное сопротивление ткани Zt может отслеживаться для того, чтобы обеспечить индикацию завершения процесса разрезания и/или коагуляции ткани или остановить активацию ультразвукового генератора 500, когда полное сопротивление ткани Zt достигнет заранее заданного порогового значения. Предел сопротивления ткани Zt может быть выбран, например, для того, чтобы сообщать о том, что сосуд рассечен. В одной форме полное сопротивление ткани Zt, начиная с момента контактирования с тканью и до момента перед непосредственным рассечением и уплотнением мышечного слоя, может находиться в диапазоне между приблизительно 10 Ом и приблизительно 1000 Ом.
Заявители обнаружили, что эксперименты, в которых используются изменяющиеся заданные значения тока (как увеличивающиеся, так и понижающиеся) и времена задержки свидетельствуют о том, что описанные формы могут применяться для отделения внутреннего мышечного слоя от наружного адвентициального слоя до завершения рассечения, что в результате повышает гемостаз и потенциально снижает общую энергию (нагрев) в области рассечения. Более того, хотя хирургические аппараты 100, 120 описаны в отношении схем определения ого полного сопротивления, используемых, чтобы определить момент отделения мышечного слоя от адвентициального слоя, другие формы, в которых не применятся никакие схемы определения, находятся в пределах объема настоящего раскрытия. Например, формы хирургических аппаратов 100, 120 могут применяться в упрощенных хирургических системах, в которых нерезонансная мощность используется для отделения слоев на заранее заданное время, приблизительно равное 1 секунде или менее, до воздействия резонансной мощности для разрезания ткани. В этом контексте такие формы не ограничены.
После описания деталей работы различных форм хирургической системы 19 (ФИГ. 1) и 190 (ФИГ. 10) можно переходить к дальнейшему описанию работы вышеупомянутой хирургической системы в рамках процесса разрезания и коагуляции ткани, применяющего хирургический аппарат, содержащий устройство ввода 406 и модуль сопротивления ткани 502. Несмотря на то, что конкретный процесс описан в связи с деталями работы, можно определить, что такой процесс предоставляет только пример того, как можно с помощью хирургической системы 19, 190 реализовать общие функциональные возможности, описанные в этом документе. Кроме того, данный процесс не обязательно должен выполняться в порядке, представленном в настоящем документе, если не указано иное. Как описано выше, устройство ввода 406 может быть использовано для программирования ступенчатого выходного сигнала (например, ток, частота) для ультразвукового преобразователя 50/узла лезвия 79.
На ФИГ. 14 изображена одна форма способа 600 приведения в действие концевого зажима, соединенного с ультразвуковой приводной системой хирургического аппарата. Способ 600, и любой из других способов, алгоритмов и т.д., описанных в этом документе могут быть инициированы подходящим образом. Например, способ 600 и любой из других способов, алгоритмов и т.д., описанных в этом документе могут быть инициированы в ответ на ввод данных пользователем, выполненный посредством любой кнопки, переключателя, педального привода и/или их комбинации, в том числе, например, посредством кнопок, переключателей и педальных приводов, описанных в этом документе. Как показано на ФИГ. 1-3 и 6-14, в качестве примерного, но не ограничивающего варианта, ультразвуковые хирургические аппараты 100, 120 могут эксплуатироваться в соответствии со способом 600 для отделения внутреннего мышечного слоя сосуда от адвентициального слоя до рассечения и герметизации сосуда. Таким образом, в различных формах концевой зажим (например, концевой зажим 81, 810) хирургического аппарата (например, хирургического аппарата 100, 120) может быть приведен в действие в соответствии со способом 600. Генератор (например, генератор 30, 500) соединен с ультразвуковой приводной системой. Ультразвуковая приводная система содержит ультразвуковой преобразователь (например, ультразвуковой преобразователь 50), соединенный с волноводом (например, с волноводом 80). Концевой зажим 81 соединен с волноводом 80. Ультразвуковая приводная система и концевой зажим 81 выполнены с возможностью резонировать при резонансной частоте (например, 55,5 кГц). В одной форме, на этапе 602, генератор 30 генерирует первый ультразвуковой управляющий сигнал. На этапе 604 ультразвуковой преобразователь 50 приводится в действие первым ультразвуковым управляющим сигналом в течение первого периода в ответ на активацию переключателя (например, переключателя 34) на узле рукоятки (например, на узле рукоятки 68) или педального привода (например, педального привода 434), соединенного с генератором 30. После первого периода на этапе 606 генератор 30 генерирует второй ультразвуковой управляющий сигнал. На этапе 608 ультразвуковой преобразователь 50 приводится в действие вторым ультразвуковым управляющим сигналом в течение второго периода в ответ на активацию переключателя 34 на узле рукоятки 68 или педального привода 434, соединенного с генератором 30. Первый управляющий сигнал, действующий в течение первого периода, отличается от второго управляющего сигнала, действующего в течение второго периода. Первый и второй управляющие сигналы определяют волновую форму ступенчатой функции в течение первого и второго периодов.
В одной форме генератор 30 генерирует третий ультразвуковой управляющий сигнал. Ультразвуковой преобразователь 50 приводится в действие третьим ультразвуковым управляющим сигналом в течение третьего периода. Третий управляющий сигнал, действующий в течение третьего периода, отличается от первого и второго ультразвуковых управляющих сигналов, действующих в течение первого и второго периодов. Первый, второй и третий управляющие сигналы определяют волновую форму ступенчатой функции в течение первого, второго и третьего периодов. В одной форме образование первого, второго и третьего ультразвуковых управляющих сигналов содержит этап генерирования соответствующих первого, второго и третьего управляющих токов и этап приведения в действие ультразвукового преобразователя 50 первым управляющим током в течение первого периода, этап приведения в действие ультразвукового преобразователя 50 вторым управляющим током в течение второго периода и этап приведения в действие ультразвукового преобразователя 50 третьим управляющим током в течение третьего периода.
В определенных формах первый, второй и третий управляющие токи могут увеличиваться, уменьшаться или оставаться одинаковыми относительно друг друга. Например, в определенных формах некоторые или все из первого, второго и третьего управляющих токов равны. Также, в определенных формах первый, второй и третий периоды времени могут принимать любое подходящее значение, включая например, доли секунды, минуты, часы и т.д. В одной примерной форме некоторые или все из первого, второго и третьего периодов времени могут составлять 55 секунд.
В одной форме генератор 30 генерирует первый ультразвуковой управляющий сигнал при первой частоте, которая отличается от резонансной частоты. Затем ультразвуковой преобразователь 50 приводится в действие первым ультразвуковым управляющим сигналом при первой частоте в течение первого периода времени. Приведение в действие при первой частоте предоставляет первый уровень механической вибрации концевого зажима 81, подходящий для отделения первой ткани от второй ткани, например, для отделения внутреннего мышечного слоя сосуда от адвентициального слоя. Генератор 30 генерирует второй ультразвуковой управляющий сигнал при резонансной частоте, например, 55,5 кГц, и приводит в действие ультразвуковой преобразователь 50 вторым ультразвуковым управляющим сигналом при резонансной частоте в течение второго периода времени, следующего за первым периодом времени. Приведение в действие при второй, резонансной частоте предоставляет второй уровень механической вибрации концевого зажима 81, подходящий для рассечения и герметизации первой ткани, так как сосуд, после того как она была отделена от внутреннего мышечного слоя. В одной форме второй ультразвуковой управляющий сигнал при резонансной частоте генерируется автоматически генератором 30 после окончания первого периода времени. В одной форме первая частота по существу отличается от резонансной частоты, а первый период времени занимает менее приблизительно одной секунды. Например, в одной форме, первая частота определяется следующим уравнением: f1=2*fo, где f1- первая частота, а fo - резонансная частота. В другой форме, первая частота определяется следующим уравнением: f1=fo/2, где f1 - первая частота, а fo - резонансная частота. Предполагается, что первый, второй и третий ультразвуковые управляющие сигналы также могут возбуждать вибрационные режимы ультразвукового преобразователя 50 в продольном, изгибном и крутильном режимах и их гармониках.
В одной форме генератор 30 отслеживает измеряемую характеристику ультразвуковой приводной системы и генерирует любой из первого и второго управляющих сигналов на основании измеренной характеристики. Например, генератор 30 отслеживает полное сопротивление Z ультразвукового преобразователя 50. Генератор 30 содержит электронную схему, подходящую для измерения полного сопротивления преобразователя 50. Например, схема чувствительности по току (например, схема чувствительности по току 426) считывает силу тока, протекающего через преобразователь 50, а схема чувствительности по напряжению (например, схема чувствительности по напряжению 428) считывает выходное напряжение, приложенное к преобразователю 50. Канальный уплотнитель (например, канальный уплотнитель 430) передает подходящий аналоговый сигнал к преобразователю аналогового сигнала в цифровой (например, АЦП 432), выходной сигнал которого передается на процессор (например, процессор 400). Процессор 400 вычисляет полное сопротивление Z преобразователя, исходя из измеренных значений силы тока и напряжения.
В одной форме, генератор 500 содержит модуль полного сопротивления (например, модуль сопротивления ткани 502) для измерения полного сопротивления участка ткани, контактирующего с концевым зажимом (например, с концевым зажимом 810). Модуль полного сопротивления 502 содержит РЧ осциллятор (например, РЧ осциллятор 506) для генерирования субтерапевтического РЧ сигнала. Субтерапевтический РЧ сигнал воздействует на лезвийную (например, лезвие 79) часть концевого зажима 810, которая образует питающий электрод. Часть ткани захватывается между концевым зажимом 810 и возвратным электродом узла прихвата (например, узла прихвата 451), и полное сопротивление ткани (например, ткани 514). Затем полное сопротивление ткани измеряется схемой чувствительности по напряжению (например, схемой чувствительности по напряжению 508) и схемой чувствительности по току (например, схемой чувствительности по току 510) модуля полного сопротивления 502. Эти сигналы передаются на АЦП 432 посредством канального уплотнителя 430. Цифровой выходной сигнал от АЦП 432 передается на процессор 400, который вычисляет полное сопротивление ткани Zt на основе измеренных значений силы тока, протекающего через ткань, и напряжения, поданного на участок лезвия 79 концевого зажима 810.
На ФИГ. 15A-C показаны различные формы логических блок-схем 700, 800, 900 для операций определения изменения состояния ткани, с которой проводятся манипуляции ультразвуковым хирургическим аппаратом, и предоставления обратной связи пользователю для индикации того, что ткань подверглась такому изменению состояния или что существует высокая вероятность того, что ткань подверглась такому изменению состояния. Операции 700, 800, 900 и различные их перестановки могут быть применены в любой реализации, в которой отслеживается состояние ткани. Например, одна или более операций 700, 800, 900 и т.д. могут выполняться автоматически при использовании хирургической системы. Также, операции 700, 800, 900 и т.д. могут быть инициированы на основании ввода данных врачом, выполненного, например, с помощью одного или более из кнопок, переключателей, педальных приводов и т.д. (например, кнопок, переключателей, педальных приводов и т.д., описанных в настоящем документе). Как описано в настоящем документе, ткань может подвергнуться изменению состояния, когда ткань отделяется от других слоев ткани или кости, когда ткань разрезается или рассекается, когда выполняется ее коагуляция и т.д., при проведении манипуляций с тканью с помощь концевого зажима ультразвукового хирургического аппарата, такого как, например, концевой зажим 81, 810 ультразвукового хирургического аппарата 100, 120, показанного на ФИГ. 1 и 10. Изменение состояния ткани может быть определено на основании вероятности возникновения события отделения ткани.
В различных формах выходной индикатор 412, показанный на ФИГ. 9 и 11, предоставляет обратную связь. Выходной индикатор 412 является особенно полезным в сферах применения, в которых ткань, с которой проводятся манипуляции концевым зажимом 81, 810, находится вне поля зрения пользователя, и в которых пользователь не видит, когда происходит изменение состояния ткани. Выходной индикатор 412 сообщает пользователю о том, что в соответствии с определением операций, описанных в связи с логическими блок-схемами 700, 800, 900, произошло изменение состояния ткани. Как описано выше, выходной индикатор 412 может быть выполнен с возможностью предоставлять пользователю различные виды обратной связи, в том числе, без ограничения, визуальную, звуковую и/или тактильную обратную связь, для того, чтобы сообщить пользователю (например, хирургу, врачу) о том, что ткань подверглась изменению состояния ткани. В качестве примерного, но не ограничивающего варианта, как обсуждалось выше, визуальная обратная связь содержит любой тип визуальной индикации, включая лампы накаливания или светодиоды, графический пользовательский интерфейс, дисплей, аналоговый индикатор, цифровой индикатор, гистограммный дисплей, цифровой буквенно-числовой дисплей. В качестве примерного, но не ограничивающего варианта, звуковая обратная связь содержит любой тип гудка, мелодию, генерированную компьютером, компьютеризованную речь, голосовой пользовательский интерфейс ГПИ, предназначенный для взаимодействия с компьютером посредством голосовой/речевой платформы. В качестве примерного, но не ограничивающего варианта, тактильная обратная связь содержит любой тип вибрационной обратной связи, предоставляемый через узел рукоятки 68 корпуса аппарата. Изменение состояния ткани может быть определено, исходя из измерений полного сопротивления преобразователя и ткани, как описывалось выше, или исходя из измерений напряжения, тока и частоты в соответствии с операциями, описанными в связи с логическими блок-схемами 700, 800, 900, описанными со ссылкой на ФИГ. 15A-C.
В одной форме логические блок-схемы 700, 800, 900 могут быть реализованы в виде исполнительных модулей (например, алгоритмов), содержащих считываемые компьютером команды, подлежащие для исполнения частью процессора 400 (ФИГ. 9, 11, 14) генератора 30, 500. В различных формах операции, описанные в связи с логическими блок-схемами 700, 800, 900, могу быть реализованы в виде одного или более компонентов программного обеспечения, например, программ, подпрограмм, логических узлов; одного или более компонентов аппаратного обеспечения, например, процессоров, ЦСП, ПЛУ, специализированных интегральных схем, схем, реестров; и/или комбинаций программного и аппаратного обеспечения. В одной форме исполнительные команды, предназначенные для выполнения операций, описанных логическими блок-схемами 700, 800, 900, могут храниться в устройстве памяти. После исполнения команды заставляют процессор 400 определять изменение состояния ткани в соответствии с операциями, описанными в логических блок-схемах 800 и 900, и предоставляют обратную связь пользователю посредством выходного индикатора 412. В соответствии с такими исполнительными командами процессор 400 отслеживает и оценивает образцы сигналов напряжения, силы тока и/или частоты, поступающие от генератора 30, 500, и в соответствии с оценкой таких образцов сигналов определяет, произошло ли изменение состояния ткани. Как более подробно будет описано ниже, изменение состояния ткани может быть определено, исходя из типа ультразвукового хирургического аппарата и уровня мощности, которым запитан аппарат. В ответ на обратную связь пользователь может контролировать режим работы ультразвукового хирургического аппарата 100, 120, или режим работы ультразвукового хирургического аппарата 100, 120 может контролироваться автоматически или полуавтоматически.
На ФИГ. 15A представлена логическая блок-схема 700 одной формы определения изменения состояния ткани и, соответственно, активации выходного индикатора 412. Как показано на ФИГ. 15А, где изображена логическая блок-схема 700, и на ФИГ. 9, где изображена приводная система 32 генератора 30, на этапе 702 часть процессора 400 приводной системы 32 замеряет сигналы напряжения (v), силы тока (i) и частоты (f) генератора 30. В проиллюстрированной форме на этапе 704 сигналы частоты и напряжения анализируются отдельно для определения соответствующих точек перегиба кривой частоты и/или точек падения напряжения. В других формах образцы токовых сигналов могут быть проанализированы отдельно в дополнение к образцам сигналов напряжения и частоты или вместо образцов сигналов напряжения. На этапе 706 текущий образец сигнала частоты передается в модуль анализа точки перегиба кривой частоты для определения изменения состояния ткани способом, показанным в логической блок-схеме 800 на ФИГ. 15B. На этапе 708 текущий образец сигнала напряжения передается в модуль анализа точки падения напряжения для определения изменения состояния ткани способом, показанным в логической блок-схеме 900 на ФИГ. 15C.
Модуль анализа точки перегиба кривой частоты и модуль анализа точки падения напряжения определяют, когда происходит изменение состояния ткани, основываясь на соотнесенных эмпирических данных для конкретного типа ультразвукового хирургического аппарата и уровня энергии, с которым аппарат приводится в действие. На этапе 714 результаты 710, полученные модулем анализа точки перегиба кривой частоты, и/или результаты 712, полученные модулем анализа падения напряжения, считываются процессором 400. Процессор 400 определяет 716, какие из результатов 710 и/или 712, полученных модулем анализа точки перегиба и/или модулем анализа падения напряжения, обозначают изменение состояния ткани. Если результаты 710, 714 не указывают на изменение состояния ткани, процессор 400 продолжает выполнение сценария по ветке «Нет» до 702 и считывает дополнительные образцы сигналов напряжения и частоты, исходящие от генератора 30. В формах, в которых при анализе применяется ток генератора, процессор 400 также будет считывать дополнительный образец токового сигнала, исходящий от генератора 30. Если результаты 710, 714 указывают на достаточное изменение состояния ткани, процессор 400 продолжает выполнение сценария по ветке «Да» до 718 и активирует выходной индикатор 412.
Как описано выше, выходной индикатор 412 может предоставить визуальную, звуковую и/или тактильную обратную связь, чтобы предупредить пользователя ультразвукового хирургического аппарата 100, 120 о том, что имело место изменение состояния ткани. В различных формах в ответ на обратную связь от выходного индикатора 412 рабочий режим генератора 30, 500 и/или ультразвукового хирургического аппарата 100, 120 может контролироваться вручную, автоматически или полуавтоматически. Рабочие режимы, без ограничения, включают отключение или выключение выходной мощности генератора 30, 500, снижение выходной мощности генератора 30, 500, циклирование выходной мощности генератора 30, 500, пульсирование выходной мощности генератора 30, 500 и/или выведение высокомощного кратковременного импульса перенапряжения от генератора 30, 500. Рабочие режимы ультразвукового хирургического аппарата в ответ на изменение состояния ткани могут быть выбраны, например, для уменьшения эффектов нагрева концевого зажима 81, 810, например, подушки для скобок 58 (ФИГ. 1-3), для предотвращения или уменьшения возможного повреждения хирургического аппарата 100, 120 и/или окружающей ткани. Это полезно, поскольку, когда преобразователь 50 приводится в действие при отсутствии материала между браншами концевого зажима 81, 810, быстро генерируется тепло, как происходит в случае, когда имеет место такое изменение состояния ткани, как при по существу отделении ткани от концевого зажима.
На ФИГ. 15B представлена логическая блок-схема 800, изображающая одну форму работы модуля анализа точки перегиба кривой частоты. На этапе 802 процессор 400 получает от 706 логической блок-схемы 700 образец частоты. На этапе 804 процессор 400 вычисляет экспоненциально-взвешенное скользящее среднее (ЭВСС) для анализа перегиба кривой частоты. ЭВСС вычисляется для фильтрации шумов, исходящих от генератора от образцов частоты. ЭВСС вычисляется в соответствии с уравнением скользящего среднего показателя частоты 806 и значения альфа (α) 808:
Stf=αYtf+(1-α)Stf-1 (2),
где:
Stf = текущее среднее скользящее значение дискретизированного сигнала частоты;
Stf-1 = предыдущее среднее скользящее значение дискретизированного сигнала частоты;
α = коэффициент сглаживания; и
Ytf = текущая точка данных дискретизированного сигнала частоты.
Значение α 808 может варьироваться от приблизительно 0 до приблизительно 1 в соответствии с требуемым коэффициентом фильтрации или сглаживания, причем малые значения α 808, приблизительно приближающиеся к 0, обеспечивает сильную фильтрацию или сглаживание, а большие значения α 808, приблизительно приближающиеся к 1, обеспечивают малую фильтрацию или сглаживание. Значение α 808 может быть выбрано, исходя из типа ультразвукового хирургического аппарата и уровня мощности. В одной форме блоки 804, 806 и 808 могут быть реализованы как переменный цифровой фильтр нижних частот 810, а значение α 808 определяет точку отсечения фильтра 810. После того, как выполнена фильтрация образцов частоты, вычисляется наклон образцов частоты на этапе 812 следующим образом:
Наклон частоты= дельта f/дельта t (3)
Вычисленные точки данных наклона частоты передаются к «медленно реагирующему» фильтру среднего скользящего 814 для вычисления среднего скользящего ЭВСС наклона частоты, чтобы далее выполнять снижение шумов. В одной форме «медленно реагирующий» фильтр скользящего среднего 814 может быть реализован путем вычисления ЭВСС наклона частоты на этапе 818 в соответствии с уравнением скользящего среднего наклона частоты 820 и значением альфа (α') 822:
S'tf=α'Y'tf+(1-α')S'tf-1 (4),
где:
S'tf = текущее среднее скользящее значение наклона частоты дискретизированного сигнала частоты;
S'tf-1 = предыдущее среднее скользящее значение наклона частоты дискретизированного сигнала частоты;
α' = коэффициент сглаживания; и
Y'tf = текущая точка данных дискретизированного сигнала частоты.
Значение α' 822 может варьироваться от приблизительно 0 до приблизительно 1, как обсуждалось ранее в отношении цифрового фильтрующего блока 810 в соответствии с требуемым коэффициентом фильтрации или сглаживания, причем малые значения α' 822, приблизительно приближающиеся к 0, обеспечивают сильную фильтрацию или сглаживание, а большие значения α' 822, приблизительно приближающиеся к 810, обеспечивают малую фильтрацию или сглаживание. Значение α' 822 может быть выбрано, исходя из типа ультразвукового хирургического аппарата и уровня мощности.
Вычисленные точки данных наклона частоты передаются к «быстро реагирующему» фильтру 816 для вычисления среднего скользящего наклона частоты. На этапе 824 «быстро реагирующий» фильтр 816 вычисляет скользящее среднее наклона частоты на основании количества точек данных 826.
В проиллюстрированной форме выходной сигнал «медленно реагирующего» фильтра скользящего среднего 814 «ЭВСС наклона» передается на вход (+) сумматора 828, а выходное значение «быстро реагирующего» фильтра 816 «Ср. наклона» передается на вход (-) сумматора 828. Сумматор 828 вычисляет разность между выходными сигналами «медленно реагирующего» фильтра среднего скользящего 814 и «быстро реагирующего» фильтра 816. Разность между выходными сигналами сравнивается на этапе 830 с предопределенным пределом 832. Предел 832 определяется на основании типа ультразвукового хирургического аппарата и уровня мощности, на который запитывается конкретный тип ультразвукового хирургического аппарата. Значение предела 832 может быть заранее задано и сохранено в памяти в виде справочной таблицы или в подобном ей виде. Если разность между «ЭВСС наклона» и «Ср. наклон» не больше предела 832, процессор 400 продолжает выполнять сценарий по ветке «Нет» и возвращает величину 834 в блок результатов 710, что указывает на то, что точка перегиба не найдена в дискретизированном сигнале частоты, и, следовательно, изменение состояния ткани не обнаружено. Однако, если разность между «ЭВСС наклона» и «Ср. наклон» больше предела 832, процессор 400 продолжает выполнять сценарий по ветке «Да» и определяет, что точка перегиба 836 кривой частоты была найдена, и возвращает индекс 838 точки в блок результатов 710, указывая на то, что точка перегиба в дискретизированных данных частоты была найдена, и, следовательно, было обнаружено изменение состояния ткани. Как описано выше со ссылкой на ФИГ. 15A, если точка перегиба кривой частоты 836 найдена, то на этапе 718 (ФИГ. 15A) процессор 400 активирует индикатор 718 изменения состояния ткани.
На ФИГ. 15C представлена логическая блок-схема 900, изображающая одну форму работы модуля анализа падения напряжения. На этапе 902 процессор 400 получает образец напряжения от блока 708 логической блок-схемы 700. На этапе 904 процессор 400 вычисляет экспоненциально-взвешенное скользящее среднее (ЭВСС) для анализа точки падения напряжения. ЭВСС вычисляется для фильтрации шумов, исходящих от генератора от образцов напряжения. ЭВСС вычисляется в соответствии с уравнением скользящего среднего показателя напряжения 906 и значения альфа (α) 908:
Stv=αYtv+(1-α)Stv-1 (5),
где:
Stv = текущее скользящее среднее дискретизированного сигнала напряжения;
Stv-1 = предыдущее скользящее среднее дискретизированного сигнала напряжения;
α = коэффициент сглаживания; и
Ytv = текущая точка данных дискретизированного сигнала напряжения.
Как описано выше, значение α 908 может варьироваться от 0 до 1 в соответствии с требуемым коэффициентом фильтрации или сглаживания и может выбираться, исходя из типа ультразвукового хирургического аппарата и уровня мощности. В одной форме, блоки 904, 906 и 908 могут быть реализованы как переменный цифровой фильтр нижних частот 910, а значение α 908 определяет точку отсечения фильтра 910. После того, как выполнена фильтрация образцов напряжения, вычисляется наклон образцов напряжения на этапе 912 следующим образом:
Наклон напряжения = дельта v/дельта t (6)
Вычисленные точки данных наклона напряжения передаются к «медленно реагирующему» фильтру среднего скользящего 914 для вычисления среднего скользящего ЭВСС наклона напряжения, чтобы далее выполнять снижение системных шумов. В одной форме, «медленно реагирующий» фильтр скользящего среднего 914 может быть реализован путем вычисления ЭВСС наклона напряжения на этапе 918 в соответствии с уравнением скользящего среднего наклона напряжения 920 и значением альфа (α') 822:
S'tv = α'Y'tv+(1-α')S'tv-1 (7),
где:
S'tv = текущее среднее скользящее значение наклона напряжения дискретизированного сигнала напряжения;
S'tv-1 = предыдущее среднее скользящее значение наклона напряжения дискретизированного сигнала напряжения;
α' = коэффициент сглаживания; и
Y'tv = текущая точка данных наклона дискретизированного сигнала напряжения.
Значение α' 922 может варьироваться от приблизительно 0 до приблизительно 1, как обсуждалось ранее в отношении цифрового фильтрующего блока 910 в соответствии с требуемым коэффициентом фильтрации или сглаживания, причем малые значения α' 922, приблизительно приближающиеся к 0, обеспечивают сильную фильтрацию или сглаживание, а большие значения α' 922, приблизительно приближающиеся к 1, обеспечивают малую фильтрацию или сглаживание. Значение α' 922 может быть выбрано, исходя из типа ультразвукового хирургического аппарата и уровня мощности.
Вычисленные точки данных наклона напряжения передаются к «быстро реагирующему» фильтру 916 для вычисления среднего скользящего наклона напряжения. На этапе 924 «быстро реагирующий» фильтр 916 вычисляет скользящее среднее наклона напряжения на основании количества точек данных 926.
В проиллюстрированной форме выходной сигнал «медленно реагирующего» фильтра скользящего среднего 914 «ЭВСС наклона» передается на вход (+) сумматора 928, а выходное значение «быстро реагирующего» фильтра 916 «Ср. наклона» передается на вход (-) сумматора 928. Сумматор 928 вычисляет разность между выходными сигналами «медленно реагирующего» фильтра среднего скользящего 914 и «быстро реагирующего» фильтра 916. Разность между выходными сигналами сравнивается на этапе 930 с заранее заданным пределом 932. Предел 932 определяется на основании типа ультразвукового хирургического аппарата и уровня мощности, на который запитывается конкретный тип ультразвукового хирургического аппарата. Значение предела 932 может быть заранее задано и сохранено в памяти в виде справочной таблицы или в подобном ей виде. Если разность между «ЭВСС наклона» и «Ср. наклон» не больше предела 932, процессор 400 продолжает выполнять сценарий по ветке «Нет» и сбрасывает счетчик на ноль на этапе 940, после чего возвращает величину 934 в блок результатов 710, что указывает на то, что точка падения напряжения не найдена в дискретизированном сигнале напряжения, и, следовательно, изменение состояния ткани не обнаружено. Однако, если разность между «ЭВСС наклона» и «Ср. наклон» больше предела 932, процессор 400 продолжает выполнять сценарий по ветке «ДА» и задает инкремент счетчика на этапе 942. На этапе 944 процессор 400 определяет, что счетчик больше 1 или больше какого-либо другого предопределенного порогового значения, например. Другими словами, процессор 400 принимает во внимание по меньшей мере две точки данных в отношении точки падения напряжения. Если счетчик не больше предела (например, 1 в проиллюстрированной форме) процессор 400 продолжает выполнять сценарий по ветке «Нет» и возвращает величину 934 в блок результатов 710, что указывает на то, что точка падения напряжения не найдена в дискретизированном сигнале напряжения, и, следовательно, изменение состояния ткани не обнаружено. Если счетчик больше предела (например, 1 в проиллюстрированной форме) процессор 400 продолжает выполнять сценарий по ветке «Да» и определяет, что точка падения напряжения 936 была найдена, и возвращает величину 938 в блок результатов 712, что указывает на то, что точка падения напряжения в дискретизированном сигнале напряжения была найдена, и, следовательно, было обнаружено изменение состояния ткани. Как описано выше со ссылкой на ФИГ. 15A, если точка напряжения 836 найдена, то на этапе 718 (ФИГ. 15A) процессор 400 активирует индикатор 718 изменения состояния ткани.
На ФИГ. 16 показана одна форма хирургической системы 1000, содержащей генератор 1002 и различные хирургические аппараты 1004, 1006, используемые с ней. На ФИГ. 16A представлена схема ультразвукового хирургического аппарата 1004, показанного на ФИГ. 16. Конфигурация генератора 1002 может быть перестроена для его использования с хирургическими приспособлениями. В соответствии с различными формами конфигурация генератора 1002 может быть перестроена для использования с различными хирургическими устройствами, в том числе, например, ультразвуковым устройством 1004 и электрохирургическим устройством или устройством для РЧ хирургии, таким как РЧ устройство 1006. Хотя в показанной на ФИГ. 16 форме генератор 1002 изображен отдельно от хирургических устройств 1004, 1006, в одной форме генератор 1002 может быть интегрирован в любое из хирургических устройств 1004, 1006 для образования единой хирургической системы. Генератор 1002 содержит устройство ввода 1045, расположенное на передней панели консоли генератора 1002. Устройство ввода 1045 может содержать любое подходящее устройство, генерирующее сигналы, подходящие для программирования работы генератора 1002.
На ФИГ. 17 представлена хирургическая система 1000, показанная на ФИГ. 16. В различных формах генератор 1002 может содержать несколько отдельных функциональных элементов, таких как модули и/или блоки. Различные функциональные элементы или модули могут быть выполнены с возможностью приводить в действие различные виды хирургических устройств 1004, 1006. Например, модуль ультразвукового генератора 1008 может приводить в действие ультразвуковые устройства, такие как ультразвуковое устройство 1004. Модуль для электрохирургии/модуль РЧ генератора 1010 может приводить в действие электрохирургическое устройство 1006. Например, соответствующие модули 1008, 1010 могут генерировать соответствующие управляющие сигналы для приведения в действие хирургических устройств 1004, 1006. В различных формах каждый модуль ультразвукового генератора 1008 и/или модуль для электрохирургии/модуля РЧ генератора 1010 могут быть интегрированы в генератор 1002. В альтернативных вариантах один или более модулей 1008, 1010 могут быть предоставлены в виде отдельных модулей, электрически соединенных с генератором 1002. (Для иллюстрации такого варианта модули 1008 и 1010 изображены в полуразрезе) Также, в некоторых формах модуль для электрохирургии/модуль РЧ генератора 1010 может быть интегрирован в модуль ультразвукового генератора 1008 или наоборот. Также, в некоторых формах генератор 1002 может быть полностью опущен, а модули 1008, 1010 могут выполняться процессорами или другим аппаратным обеспечением, содержащимся в соответствующих аппаратах 1004, 1006.
В соответствии с требуемыми формами модуль ультразвукового генератора 1008 может образовывать управляющий сигнал или сигналы с конкретным напряжением, силой тока и частотой, например, 55 500 циклов в секунду (Гц). Управляющий сигнал или сигналы могут передаваться в ультразвуковое устройство 1004, а точнее к преобразователю 1014, который может работать, например, как описано выше. Преобразователь 1014 и волновод, продолжающийся через стержень 1015 (волновод не показан на ФИГ. 16A), могут вместе образовывать ультразвуковую приводную систему, приводящую в движение ультразвуковое лезвие 1017 концевого зажима 1026. В одной форме генератор 1002 может быть выполнен с возможностью генерировать управляющий сигнал с конкретным напряжением, силой тока и/или частотой выходного сигнала, который может быть ступенчато или иным образом изменен с высоким разрешением, точностью и повторяемостью.
Генератор 1002 может быть активирован для того, чтобы передать управляющий сигнал преобразователю 1014 любым подходящим способом. Например, генератор 1002 может содержать педальный привод 1020, соединенный с генератором 1002 с помощью провода 1022 педального привода. Врач может активировать преобразователь 1014, нажимая педальный привод 1020. В дополнение или вместо педального привода 1020 некоторые формы ультразвукового устройства 1004 могут использовать один или более переключателей, расположенных на рукоятке таким образом, чтобы при активации приводить к тому, чтобы генератор 1002 активировал преобразователь 1014. В одной форме, например, один или более переключателей могут содержать пару кнопок-переключателей 1036a, 1036b (см. ФИГ. 16A), например, для определения рабочего режима устройства 1004. Когда кнопка-переключатель 1036a нажата, например, ультразвуковой генератор 1002 может передавать максимальный управляющий сигнал к преобразователю 1014, в результате чего последний будет производить максимальный выход ультразвуковой энергии. Нажатие кнопки-переключателя 1036b может привести к тому, что ультразвуковой генератор 1002 будет передавать к преобразователю 1014 выбираемый пользователем управляющий сигнал, в результате чего преобразователь будет производить выход ультразвуковой энергии, меньший максимального. Устройство 1004 дополнительно или в качестве альтернативы может содержать второй переключатель (не показан) для того, чтобы, например, обозначать положение триггера закрытия бранши для управления браншами концевого зажима 1026. Также, в некоторых формах ультразвуковой генератор 1002 может приводиться в действие, основываясь на положении триггера закрытия бранши (например, ультразвуковая энергия может воздействовать тогда, когда врач нажимает на триггер закрытия бранши, чтобы закрыть бранши).
В дополнение или в качестве альтернативы один или более переключателей может содержать кнопку-переключатель 1036c, которая в нажатом положении приводит к тому, что генератор 1002 подает импульсный выходной сигнал. Импульсы могут передаваться с любой подходящей частотой и группировкой, например. В определенных формах уровень мощности импульсов может представлять собой уровни мощности, связанные с кнопками-переключателями 1036a, 1036b (макс., меньше максимального), например.
Следует понимать, что устройство 1004 может содержать любую комбинацию кнопок-переключателей 1036a, 1036b, 1036c. Например, конфигурация устройства 1004 может содержать только две кнопки-переключателя: кнопку-переключатель 1036a для образования максимального выхода ультразвуковой энергии и кнопку-переключатель 1036c для образования импульсного выходного сигнала на любом из максимального уровня мощности или уровня мощности, который является меньше максимального. Таки образом, конфигурация выхода управляющего сигнала генератора 1002 может представлять собой 5 непрерывных сигналов и 5 или 4 или 3 или 2 или 1 импульсный сигнал. В определенных формах специфическая конфигурация управляющего сигнала может контролироваться на основе, например, настроек ЭСППЗУ, заданных в генераторе 1002, и/или на основе выбранного пользователем уровня мощности.
В определенных формах в качестве альтернативы кнопке-переключателю 1036с может применяться двухпозиционный переключатель. Например, устройство 1004 может содержать кнопку-переключатель 1036a для образования непрерывного выходного сигнала при максимальном уровне мощности и двухпозиционную кнопку-переключатель 1036b. В первом фиксированном положении, кнопка-переключатель 1036b может образовывать непрерывный выходной сигнал при менее чем максимальном уровне мощности, а во втором фиксированном положении кнопка-переключатель 1036b может образовывать импульсный выходной сигнал (например, при максимальном или при менее чем максимальном уровне мощности в зависимости от настроек ЭСППЗУ).
В соответствии с описанными формами модуль для электрохирургии/модуль РЧ генератора 1010 может генерировать управляющий сигнал или сигналы с выходной мощностью, подходящей для выполнения биполярных электрохирургических операций с применением радиочастотной (РЧ) энергии. В биполярной электрохирургии управляющий сигнал может быть передан, например, к электродам электрохирургического устройства 1006, например. Таким образом, генератор 1002 может быть выполнен с возможностью передачи в терапевтических целях к ткани электрической энергии, достаточной для обработки ткани (например, коагуляции, прижигания, сварки ткани).
Генератор 1002 может содержать устройство ввода 1045 (ФИГ. 16), расположенное, например, на консоли передней панели генератора 1002. Устройство ввода 1045 может содержать любое подходящее устройство, генерирующее сигналы, подходящие для программирования работы генератора 1002. При эксплуатации, пользователь может запрограммировать или иным образом управлять работой генератора 1002, используя устройство ввода 1045. Устройство ввода 1045 может содержать любое подходящее устройство, генерирующее сигналы, которые могут использоваться генератором (например, одним или более процессорами, содержащимися в генераторе) для управления работой генератора 1002 (например, работой модуля ультразвукового генератора 1008 и/или модуля для электрохирургии/модуля РЧ генератора 1010). В различных формах устройство ввода 1045 содержит одну или более кнопок, переключателей, дисковых переключателей, клавиатуру, кнопочную панель, сенсорный монитор, указывающее устройство, удаленное подключение к выделенному компьютеру или к компьютеру общего назначения. В других формах устройство ввода 1045 может содержать подходящий пользовательский интерфейс, такой как один или более экранов пользовательского интерфейса, отображенных на сенсорном мониторе, например. Соответственно, с помощью устройства ввода 1045 пользователь может устанавливать или программировать различные рабочие параметры генератора, такие как, например, сила тока (I), напряжение (V), частота (f) и/или период времени (T) управляющего сигнала или сигналов, генерированных модулем ультразвукового генератора 1008 и/или модулем для электрохирургии/модулем РЧ генератора 1010.
Генератор 1002 может также содержать устройство вывода 1047 (ФИГ. 16), такое как выходной индикатор, расположенный, например, на консоли передней панели генератора 1002. Устройство вывода 1047 содержит одно или более устройств, обеспечивающих пользователю обратную связь для считывания характеристик. Такими устройствами могут являться, например, устройства визуальной обратно связи (например, устройством визуальной обратной связи может являться лампа накаливания, светодиод, графический пользовательский интерфейс, экран, аналоговый индикатор, цифровой индикатор, гистограммный дисплей, цифровой буквенно-числовой дисплей, ЖК-монитор, светодиодный индикатор), устройства звуковой обратная связи (например, устройством звуковой обратной связи может быть динамик, гудок, звуковая мелодия, генерированная компьютером, компьютеризованная речь, голосовой пользовательский интерфейс (ГПИ), предназначенный для взаимодействия с компьютером посредством голосовой/речевой платформы) или устройства тактильной обратной связи (например, устройством тактильной обратной связи может быть любой тип вибрационной обратной связи, гаптическое управляющее устройство).
Хотя определенные модули и/или блоки генератора 1002 могут быть описаны путем примеров, понятно, что может использоваться большее и/или меньшее количество блоков, и такое использование все равно входит в объем описанных форм. Кроме того, хотя различные формы могут быть описаны в качестве модулей и/или блоков для упрощения описания, такие модули и/или блоки могут быть реализованы с помощью одного или более компонентов аппаратного обеспечения, например, процессоров, цифровых сигнальных процессоров (ЦСП), программируемых логических устройств (ПЛУ), специализированных интегральных схем (ИС), схем, реестров и/или компонентов программного обеспечения, например, программ, подпрограмм, логических устройств и/или комбинаций компонентов программного и аппаратного обеспечения. Также, в некоторых формах различные модули, описанные в этом документе, могут быть реализованы с применением подобного аппаратного обеспечения, расположенного внутри аппаратов 100, 120, 1004, 1006 (т.е. генератор 30, 50, 1002 может не использоваться).
В одной форме управляющий модуль 1008 ультразвукового генератора и модуль для электрохирургии/модуль РЧ привода 1010 могут содержать одно или более встроенных приложений, реализованных в виде встроенных программ, программного обеспечения, аппаратного обеспечения или их комбинации. Модули 1008, 1010 могут содержать различные исполнительные модули, такие как программное обеспечение, программы, данные, драйвера, интерфейсы для прикладных программ (API-интерфейсы) и т.п. Встроенные программы могут храниться в энергонезависимой памяти (NVM), такой как постоянная память (ПЗУ) с побитовой маскировкой или флэш-память. В различных реализациях хранение встроенных программ в ПЗУ может сохранить флэш-память. Энергонезависимая память может содержать другие виды памяти, включая, например, программируемое ПЗУ (ППЗУ), стираемое программируемое ПЗУ (СППЗУ), электрически стираемое программируемое ПЗУ (ЭСППЗУ) или оперативное запоминающее устройство (ОЗУ) с автономным питанием, такое как динамическое ОЗУ (ДОЗУ), ДОЗУ с удвоенной скоростью передачи данных (DDRAM) и/или синхронное ДОЗУ (СДОЗУ).
В одной форме модули 1008, 1010 содержат компонент аппаратного обеспечения, реализованный в виде процессора для выполнения команд программы, предназначенной для мониторинга различных измеряемых характеристик устройств 1004, 1006 и генерирования соответствующих выходных управляющих сигналов для эксплуатации устройств 1004, 1006. В формах, в которых генератор 1002 применяется в сочетании с устройством 1004, выходной управляющий сигнал может приводить ультразвуковой преобразователь 1014 в рабочие режимы разрезания и/или коагуляции. Электрические характеристики устройства 1004 и/или ткани могут быть измерены и использованы для контроля рабочих аспектов генератора 1002 и/или переданы пользователю в качестве обратной связи. В формах, в которых генератор 1002 поменяется в сочетании с устройством 1006, выходной управляющий сигнал может подавать электрическую энергию (например, РЧ энергию) к концевому зажиму 1032 в режимах разрезания, коагуляции и/или высушивания. Электрические характеристики устройства 1006 и/или ткани могут быть измерены и использованы для контроля рабочих аспектов генератора 1002 и/или переданы пользователю в качестве обратной связи. В различных формах, как обсуждалось выше, компоненты аппаратного обеспечения могут быть реализованы в виде ЦСП, ПЛУ, специализированных ИС, схем и/или реестров. В одной форме процессор может быть выполнен с возможностью хранения и выполнения команд компьютерного программного обеспечения для генерирования ступенчатых выходных сигналов, предназначенных для приведения в действие различных компонентов устройств 1004, 1006, таких как ультразвуковой преобразователь 1014 и концевые зажимы 1026, 1032.
На ФИГ. 18 показана эквивалентная схема 1050 ультразвукового преобразователя, такого как ультразвуковой преобразователь 1014, в соответствии с одной формой. Схема 1050 содержит первую «механическую» ветвь, имеющую последовательно подсоединенную катушку индуктивности Ls, сопротивление Rs и емкость Cs, которые определяют электромеханические свойства резонатора, и вторую емкостную ветвь, имеющую статическую емкость Co. Управляющий ток Ig может быть передан от генератора при управляющем напряжении Vg, когда механический ток Im протекает через первую ветвь и ток Ig-Im протекает через емкостную ветвь. Контроль над электромеханическими свойствами ультразвукового преобразователя может достигаться путем надлежащего управления Ig и Vg. Как объяснено выше, традиционные архитектуры генератора могут содержать подстроечную катушку индуктивности Lt (показана в полуразрезе на ФИГ. 18) для подстройки в параллельном резонансном контуре статической емкости Co при резонансной частоте таким образом, что по существу весь выходной ток генератора Ig будет протекать через механическую ветвь. Таким образом, контроль тока в механической ветви Im достигается путем управления выходным током генератора Ig. Подстроечная катушка индуктивности Lt характерна для статической емкости Co ультразвукового преобразователя, однако, другой ультразвуковой преобразователь, обладающий другой статической емкостью, требует использования другой подстроечной катушки индуктивности Lt. Более того, поскольку подстроечная катушка индуктивности Lt подбирается по номинальной величине статической емкости Co при одной резонансной частоте, точное управление током в механической ветви Im гарантируется только при такой частоте, и когда частота смещается вниз вместе с температурой преобразователя, точное управление током в механической ветви подвергается риску.
Формы генератора 1002 не полагаются на подстроечную катушку индуктивности Lt при мониторинге тока в механической ветви Im. Вместо этого генератор 1002 может использовать измеренное значение статической емкости Co между применениями мощности для специфического ультразвукового хирургического устройства 1004 (параллельно с управляющим сигналом напряжения и данными обратной связи о токе) для определения величин тока в механической ветви Im на динамической и постоянной основе (например, в режиме реального времени). Такие формы генератора 1002 могут, таким образом, предоставить виртуальную подстроку, чтобы смоделировать систему, которая может регулироваться или резонировать с любым значением статической емкости Co при любой частоте, а не только лишь при одной резонансной частоте, задаваемой номинальной величиной статической емкости Co.
На ФИГ. 19 представлена упрощенная блок-схема одной формы генератора 1002, которая, кроме других преимуществ, подтверждает возможность не зависящей от индуктивности регулировки, как описано выше. Дополнительные детали генератора 1002 описаны в одновременно поданной заявке на патент США, принадлежащей тому же правообладателю, сер. №12/896,360, под заголовком «Генератор для ультразвукового и электрохирургического устройства для применения в хирургии», досье патентного поверенного № END6673USNP/100558, раскрытие которого во все своей полноте включено в настоящий документ путем отсылки. Как показано на ФИГ. 19, генератор 1002 может содержать изолированную платформу пациента 1052, соединенную с неизолированной платформой 1054 с помощью силового трансформатора 1056. Вторичная обмотка 1058 силового трансформатора 1056 содержится в изолированной платформе 1052 и может содержать резьбовую конфигурацию (например, центрированную или нецентрированную резьбовую конфигурацию) для определения выходных управляющих сигналов 1060a, 1060b, 1060c, чтобы подавать выходные управляющие сигналы к различным хирургическим устройствам, таким как, например, ультразвуковое хирургическое устройство 1004 и электрохирургическое устройство 1006. В частности, выходы управляющих сигналов 1060a, 1060c могут подавать ультразвуковой управляющий сигнал (например, среднеквадратичный управляющий сигнал 420 В) к ультразвуковому хирургическому устройству 1004, а выходы управляющих сигналов 1060b, 1060c могут подавать электрохирургический управляющий сигнал (например, среднеквадратичный управляющий сигнал 100В) к электрохирургическому устройству 1006, где выход 1060b соответствует центральному витку силового трансформатора 1056.
В определенных формах ультразвуковой и электрохирургический управляющие сигналы могут подаваться одновременно к отдельным хирургическим аппаратам и/или к одному и тому же хирургическому аппарату, который способен передавать и ультразвуковую, и электрохирургическую энергию к ткани. Пример лезвия 79 и узла прихвата 415 одной примерной формы такого хирургического аппарата приведен выше со ссылкой на ФИГ. 13. Следует понимать, что электрохирургический сигнал, предоставляемый либо выделенному электрохирургическому аппарату и/или совмещенному ультразвуковому/электрохирургическому аппарату, может представлять собой сигнал терапевтического или субтерапевтического уровня.
Неизолированная платформа 1054 может содержать усилитель мощности 1062, имеющий выход, соединенный с первичной обмоткой 1064 силового трансформатора 1056. В определенных формах усилитель мощности 1062 может содержать двухтактный усилитель. Например, неизолированная платформа 1054 может далее содержать логическое устройство 1066 для подачи цифрового выходного сигнала к преобразователю цифрового сигнала в аналоговый (ЦАП) 1068, который в свою очередь подает соответствующий аналоговый сигнал к входу усилителя мощности 1062. В определенных формах логическое устройство 1066 может кроме прочих логических схем содержать программируемую логическую матрицу (ПЛМ), перепрограммируемую логическую матрицу (ППЛМ), программируемое логическое устройство (ПЛУ), например. В силу того, что логическое устройство 1066 управляет входом усилителя мощности 1062 с помощью ЦАП 1068, оно может, таким образом, контролировать любое из множества параметров (например, частоту, форму волновой формы, амплитуду волновой формы) управляющих сигналов, проявляющихся на выходах 1060a, 1060b, 1060c управляющих сигналов. В определенных формах и, как описано далее, логическое устройство 1066, в сочетании с процессором (например, процессор для обработки цифровых сигналов, описанный далее), может реализовать множество основанных на обработке цифровых сигналов (ОЦС) и/или других управляющих алгоритмов для контроля параметров выхода управляющих сигналов от генератора 1002.
Питание может подаваться к шине электропитания усилителя мощности 1062 с помощью регулятора переключения режимов 1070. В определенных формах регулятор переключения режимов 1070 может содержать регулируемый импульсный понижающий стабилизатор напряжения, например. Неизолированная платформа 1054 может далее содержать первый процессор 1074, который в одной форме может содержать процессор ОЦС, такой как Аналоговые устройства ADSP-21469 SHARC DSP, выпускаемое компанией «Analog Devices», г. Норвуд, штат Массачусетс, например, хотя в различных формах может использоваться любой подходящий процессор. В определенных формах процессор 1074 может управлять работой переключаемого силового преобразователя 1070, который реагирует на данные о напряжении, которые являются частью обратной связи, получаемой от усилителя мощности 1062 процессором ОЦС 1074 через преобразователь аналогового сигнала в цифровой (АЦП) 1076. В одной форме, например, процессор ОЦС 1074 может получать в качестве входных данных от АЦП 1076 огибающую сигнала (например, РЧ сигнал), усиленную усилителем мощности 1062. После этого процессор ОЦС 1074 может управлять регулятором переключения режимов 1070 (например, с помощью выхода широтно-импульсной модуляции (ШИМ)) таким образом, что напряжение питания, подаваемое к усилителю мощности 1062, повторяет огибающую усиленного сигнала. Динамически модулируя напряжение питания усилителя мощности 1062 на основе огибающей сигнала, можно значительно повысить эффективность усилителя мощности по сравнению с применением схем усилителей с фиксированным напряжением питания.
В определенных формах логическое устройство 1066 в сочетании с процессором ОЦС 1074 может реализовать схему управления цифрового генератора прямого синтеза (ЦСПС) для контроля формы, частоты и/или амплитуды волновой формы управляющих сигналов, исходящих от генератора 1002. В одной форме, например, логическое устройство 1066 может реализовать управляющий алгоритм ЦСПС путем повторного вызова образцов волновых форм, сохраненных в динамически обновляемой справочной таблице, такой как справочная таблица ОЗУ, которая может быть встроена в ПЛИС. Такой управляющий алгоритм особенно полезен в ультразвуковых применениях, в которых ультразвуковой преобразователь, такой как ультразвуковой преобразователь 1014, может приводиться в действие чистым синусоидальным током при его резонансной частоте. Поскольку другие частоты могут вызывать паразитные резонансы, сведение к минимуму или сокращение общего искажения тока в механической ветви может соответственно сводить к минимуму или сокращать нежелательные эффекты резонанса. Поскольку на форму волновой формы выхода управляющего сигнала, исходящего от генератора 1002, воздействуют различные источники искажения, присутствующие в управляющем контуре выхода (например, силовой трансформатор 1056, усилитель мощности 1062), данные о напряжении и силе тока, являющиеся частью обратной связи, в зависимости от управляющего сигнала, могут быть поданы в качестве входных данных в алгоритм, такой как алгоритм управления ошибками, реализуемый процессором ОЦС 1074, который компенсирует искажение, предварительно искажая или изменяя образцы волновых форм, сохраненные в справочной таблице на динамической, постоянной основе (например, в режиме реального времени). В одной форме количество или степень предварительного искажения, примененное к образцам из справочной таблицы, может основываться на погрешности между вычисленной силой тока в механической ветви и желаемой формой волновой формы тока, причем погрешность определяется последовательно для каждого образца. Таким образом, предварительно искаженные образцы из справочной таблицы, будучи обработанными управляющим контуром, могут привести к тому, что управляющий сигнал в механической ветви будет иметь требуемую форму волновой формы (например, синусоидальную) для того, чтобы оптимальным образом приводить в действие ультразвуковой преобразователь. В таких формах образцы волновых форм из справочной таблицы, таким образом, будут представлять собой не требуемую форму волновой формы управляющего сигнала, а форму волновой формы, требуемую для того, чтобы, в конечном счете, образовать требуемую форму волновой формы управляющего сигнала в механической ветви, когда эффекты искажения принимаются во внимание.
Неизолированная платформа 1054 может далее содержать АЦП 1078 и АЦП 1080, соединенные с выходом силового трансформатора 1056 через соответствующие разделяющие трансформаторы 1082, 1084 для того, чтобы соответствующим образом отбирать образцы напряжения и тока выхода управляющих сигналов, исходящих от генератора 1002. В определенных формах, АЦП 1078, 1080 могут быть выполнены с возможностью отбирать образцы с высокой скоростью (например, 80 млн. выборок в секунду), чтобы активировать отбор образцов управляющих сигналов с запасом. В одной форме, например, скорость отбора АЦП 1078, 1080 может позволить получить приблизительно 200-кратный (в зависимости от частоты) запас отбора образцов управляющих сигналов. В определенных формах, операции по отбору образцов АЦП 1078, 1080 могут выполняться одним АЦП, получающим входные сигналы напряжения и тока по двухходовому канальному уплотнителю. Применение высокоскоростного отбора образцов в формах генератора 1002 дает возможность, кроме прочего, вычислять комплексный ток, протекающий через механическую ветвь (который в определенных формах может использоваться для реализации управления формой волновой формы, основанное на ЦСПС, как описано выше), выполнять точное цифровое фильтрование дискретизированных сигналов и вычислять действительное потребление мощности с высокой степенью точности. Вывод данных о напряжении и токе, составляющих часть обратной связи, преобразователями АЦП 1078, 1080 может быть получен и обработан (например, FIFO-буферизация, уплотнение каналов) логическим устройством 1066 и сохранен в запоминающем устройстве для использования при последующем поиске и выборке, например, выполняемых процессором ОЦС 1074. Как отмечено выше, данные о напряжении и токе, составляющие часть обратной связи, могут использоваться в качестве входных данных для алгоритма предварительного искажения или изменения образцов волновых форм из справочной таблицы на динамической и постоянной основе. В определенных формах для этого может быть необходимо индексировать каждую сохраненную пару данных обратной связи о напряжении и токе в зависимости от соответствующего образца (или иным образом связать с таким образцом) из справочной таблицы, который был выдан логическим устройством 1066 в момент получения пары данных обратной связи о напряжении и токе. Такая синхронизация образцов из справочной таблицы и данных обратной связи о напряжении и токе способствует корректному согласованию по времени и стабильности алгоритма предварительного искажения.
В определенных формах данные обратной связи о напряжении и токе могут быть использованы для управления частотой и/или амплитудой (например, амплитудой тока) управляющих сигналов. В одной форме, например, данные обратной связи о напряжении и токе могут быть использованы для определения фазы полного сопротивления. Затем, для сведения к минимуму или сокращения разности между определенной фазой полного сопротивления и заданным значением фазы полного сопротивления (например, 0º) можно контролировать частоту управляющего сигнала, сводя к минимуму или сокращая, таким образом, влияние гармонического искажения и, соответственно, повышая точность измерения фазы полного сопротивления. Определение фазы полного сопротивления и управляющего сигнала частоты может быть реализовано в процессоре ОЦС 1074, например, если управляющий сигнал частоты подается в качестве входных данных в управляющий алгоритм ЦСПС, реализованный логическим устройством 1066.
В другой форме, например, для поддержания амплитуды тока управляющего сигнала на заданном уровне можно отслеживать данные обратной связи о токе. Заданное значение амплитуды тока может быть указано непосредственным образом или может определяться косвенным образом, исходя из указанных заданных значений амплитуды напряжения и мощности. В определенных формах управление амплитудой тока может осуществляться управляющим алгоритмом, таким как, например, управляющий ПИД-алгоритм, в процессоре 1074. Переменными, контролируемыми управляющим алгоритмом для того, чтобы подходящим образом управлять амплитудой тока управляющего сигнала могут являться, например, масштабирование образцов волновых форм из справочной таблицы, сохраненных в логическом устройстве 1066, и/или полное выходное напряжение ЦАП 1068 (которое подается на вход усилителя мощности 1062) через ЦАП 1086.
Неизолированная платформа 1054 может далее содержать второй процессор 1090, который, кроме прочего, предоставляет функциональные возможности пользовательского интерфейса (ПИ). В одной форме процессор ПИ 1090 может содержать процессор Atmel AT91SAM9263, оборудованный ядром ARM 926EJ-S, выпускаемый компанией «Atmel Corporation», г. Сан-Хосе, штат Калифорния, например. Примерами функциональных возможностей ПИ, которые поддерживает процессор ПИ 1090, может быть звуковая и визуальная обратная связь, обмен данными с периферийными устройствами (например, через интерфейс универсальной последовательной шины (USB)), связь с педальным переключателем 1020, связь с устройством ввода 1009 (например, с сенсорным экраном) и связь с устройством вывода 1047 (например, с динамиком). Процессор ПИ 1090 может обмениваться данными с процессором 1074 и логическим устройством 1066 (например, через шины последовательного периферийного интерфейса (SPI)). Хотя процессор ПИ 1090 главным образом поддерживает функциональные возможности ПИ, в определенных формах он также может координировать работу с процессором ОЦС 1074 для реализации снижения степени риска. Например, процессор ПИ 1090 может быть запрограммирован для отслеживания различных аспектов ввода данных пользователем и/или других входных данных (например, ввод данных с помощью сенсорного экрана, ввод данных с помощью педального переключателя 1020 (ФИГ. 17), входные сигналы от датчика температуры) и может отключать выходную мощность генератора 1002 при выявлении ложного условия.
В определенных формах и процессор ОЦС 1074, и процессор ПИ 1090, например, могут определять и отслеживать режим работы генератора 1002. Для процессора ОЦС 1074 режим работы генератора 1002 может определять, например, какой управляющий и/или диагностический процесс должен выполнять процессор ОЦС 1074. Для процессора ПИ 1090, режим работы генератора 1002 может определять, например, какие элементы пользовательского интерфейса (например, экран монитора, звуковые сигналы) представлять пользователю. Соответствующие процессоры ОЦС и ПИ 1074, 1090 могут независимо поддерживать текущий режим работы генератора 1002 и распознавать и оценивать возможные переходы из текущего режима работы. Процессор ОЦС 1074 может выполнять функции управляющего устройства для таких взаимосвязанных устройств и определять, когда должны происходить переходы между режимами работы. Процессор ПИ 1090 может быть осведомлен о корректных переходах между режимами работы и может подтверждать, что конкретный переход является целесообразным. Например, когда процессор ОЦС 1074 передает команду процессору ПИ 1090 перейти в определенный режим, процессор ПИ 1090 может проверить, корректен ли запрашиваемый переход. Если процессор ПИ 1090 определяет, что запрашиваемый переход не корректен, процессор ПИ 1090 может перевести генератор 1002 в режим сбоя.
Неизолированная платформа 1054 может далее содержать контроллер 1096 для мониторинга устройств ввода 1045 (например, емкостный датчик касания, используемый для включения и выключения генератора 1002, емкостный сенсорный экран). В определенных формах контроллер 1096 может содержать по меньшей мере один процессор и/или другое устройство управления, связанное с процессором ПИ 1090. В одной форме, например, контроллер 1096 может содержать процессор (например, 8-битный контроллер Mega168, выпускаемый компанией «Atmel»), выполненный с возможностью мониторинга данных, вводимых пользователем, предоставляемых с помощью одного или более емкостных датчиков касания. В одной форме контроллер 1096 может содержать контроллер сенсорного экрана (например, контроллер сенсорного экрана QT5480, выпускаемый компанией «Atmel») для контроля и управления получением данных о касаниях от емкостного сенсорного экрана.
В определенных формах, когда генератор 1002 находится в «обесточенном» режиме, контроллер 1096 может продолжать получать рабочее питание (например, через линию от источника электропитания генератора 1002, такой как источник электропитания 2011, описанный далее). Таким образом, контроллер 196 может продолжать выполнять мониторинг устройства ввода 1045 (например, емкостного датчика касания, расположенного на передней панели генератора 1002) для включения и выключения генератора 1002. Когда генератор 1002 находится в обесточенном режиме, контроллер 1096 может активировать источник электропитания (например, активировать работу одного или более преобразователей напряжения постоянного тока в постоянный ток 2013 источника электропитания 2011) при определении активации пользователем устройства ввода «включения/выключения» 1045. Контроллер 1096 может, таким образом, инициировать последовательность перевода генератора 1002 в «запитанный» режим. И наоборот, контроллер 1096 может инициировать последовательность перевода генератора 1002 в обесточенный режим, если активация устройства ввода «включения/выключения» 1045 была проведена тогда, когда генератор 1002 находился в запитанном режиме. В определенных формах, например, контроллер 1096 может сообщить об активации устройства ввода «включения/выключения» 1045 процессору 1090, который, в свою очередь, реализует необходимую последовательность процедур для перевода генератора 1002 в обесточенный режим. В таких формах контроллер 196 может не иметь независимого средства для отключения электропитания генератора 1002 после того, как для него был установлен запитанный режим.
В определенных формах контроллер 1096 может заставлять генератор 1002 предоставлять звуковую или иную сенсорную обратную связь для оповещения пользователя том, что запущена последовательность перехода в запитанный или обесточенный режим. Такое оповещение может предоставляться в начале последовательности перехода в запитанный или обесточенный режим и до начала других процессов, связанных с такой последовательностью.
В определенных формах изолированная платформа 1052 может содержать контур взаимодействия с прибором 1098, для того, например, чтобы предоставлять интерфейс обмена данными между контуром управления хирургического устройства (например, контуром управления, содержащим переключатели рукоятки) и компонентами не изолированной платформы 1054, такими как, например, программируемое логическое устройство 1066, процессор ОЦС 1074 и/или процессор ПИ 190. Контур взаимодействия с прибором 1098 может обмениваться информацией с компонентами не изолированной стадии 1054 через канал связи, который поддерживает подходящую степень электроизоляции между платформами 1052, 1054, такой как, например, инфракрасный (ИК) канал связи. Электропитание может подаваться к контуру взаимодействия с прибором 1098 с использованием, например, регулятора малого падения напряжения, питание которого выполняется от разделяющего трансформатора, приводимого в действие от не изолированной платформы 1054.
В одной форме контур взаимодействия с прибором 198 может содержать логическое устройство 2000 (например, логическую схему, программируемую логическую схему, ПЛМ, ПЛИС, ПЛУ), связанное со схемой формирования сигналов 2002. Схема формирования сигналов 2002 может быть выполнена с возможностью получения периодического сигнала от логической схемы 2000 (например, прямоугольного сигнала 2 кГц) для генерации биполярного опрашивающего сигнала с идентичной частотой. Опрашивающий сигнал может генерироваться с применением, например, биполярного источника тока, запитанного от дифференциального усилителя. Опрашивающий сигнал может быть сообщен в контур управления хирургического устройства (например, путем использования проводящей пары в проводе, соединяющем генератор 102 с хирургическим устройством) и может отслеживаться для определения состояния или конфигурации контура управления. Контур управления может содержать множество переключателей, резисторов и/или диодов для того, чтобы изменять одну или более характеристик (например, амплитуду, выпрямление сигнала) опрашивающего сигнала таким образом, чтобы состояние или конфигурация контура управления была уникальным образом выражена, исходя из одной или более характеристик. В одной форме, например, схема формирования сигналов 2002 может содержать АЦП для генерирования образцов сигнала напряжения, появляющихся на входах контура управления в результате прохождения через них опрашивающего сигнала. После этого, логическое устройство 2000 (или компонент неизолированной платформы 1054) может определить состояние или конфигурацию контура управления, основываясь на образцах АЦП.
В одной форме контур взаимодействия с прибором 1098 может содержать первый интерфейс канала передачи данных 2004 для того, чтобы обеспечить обмен данными между логической схемой 2000 (или другим элементом контура взаимодействия с прибором 1098), и первый канал передачи данных, расположенный в хирургическом устройстве или иным образом связанный с ним. В определенных формах, например, первый канал передачи данных 2006 (ФИГ. 16A) может располагаться в проводе, несъемным образом присоединенном к рукоятке хирургического устройства, или в переходнике, предназначенном для сочленения конкретного типа хирургического устройства с генератором 1002. Канал передачи данных 2006 может быть реализован любым подходящим образом и может обмениваться данными с генератором в соответствии с любым подходящим протоколом, в том числе, например, протоколом, описанном в этом документе относительно контура 6006. В определенных формах первый канал передачи данных может содержать энергонезависимое устройство хранения данных, такое как электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ). В определенных формах, как показано на ФИГ. 19, первый интерфейс канала передачи данных 2004 может быть реализован отдельно от логического устройства 2000 и может содержать подходящую электронную схему (например, дискретные логические устройства, процессор) для обеспечения обмена данными между программируемым логическим устройством 2000 и первым каналом передачи данных. В других формах первый интерфейс канала передачи данных 2004 может быть интегрирован в логическое устройство 2000.
В определенных формах первый канал передачи данных 2006 может хранить информацию, касающуюся конкретного хирургического устройства, с которым он связан. Такая информация может содержать, например, номер модели, серийный номер, количество операций, в которых применялось хирургическое устройство и/или любой другой вид информации. Такая информация может быть считана контуром взаимодействия с прибором 1098 (например, логическим устройством 2000), передана компоненту не изолированной платформы 1054 (например, логическому устройству 1066, процессору ОЦС 1074 и/или процессору ПИ 1090) для представления пользователю через устройство вывода 1047 и/или для управления функциями или работой генератора 1002. К тому же, любой тип информации может быть передан первому каналу передачи данных 2006 на хранение через интерфейс канала передачи данных 2004 (например, используя логическое устройство 2000). Такая информация может содержать, например, обновленное количество операций, в которых использовалось хирургическое устройство и/или даты и/или времена его использования.
Как обсуждалось ранее, хирургический аппарат может отсоединяться от рукоятки (например, прибор 1024 может отсоединяться от рукоятки 1014) для способствования взаимозаменяемости и/или утилизации аппарата. В таких случаях, традиционные генераторы могут иметь ограниченные возможности распознавания конкретных конфигураций используемых аппаратов и, соответственно, оптимизации управляющих и диагностических процессов. Однако, добавление считываемых каналов передачи данных в хирургические аппараты для исправления этого недостатка является проблематичным с точки зрения совместимости. Например, разработка хирургического устройства, совместимого с предыдущими версиями генераторов, не обладающих обязательной функциональностью считывания данных, может оказаться не практичным в связи, например, с отличиями сигнальных схем, сложностью конструкции и дороговизной. Формы инструментов, описанные в настоящем документе, справляются с этими проблемами путем применения каналов передачи данных, которые могут быть реализованы в существующих хирургических аппаратах рационально с экономической точки зрения и с минимальными изменениями конструкции, чтобы сохранить совместимость хирургических устройств с текущими платформами генераторов.
К тому же, формы генератора 1002 могут обеспечить обмен данными с каналами передачи данных приборов. Например, генератор 1002 может быть выполнен с возможностью обмена данными со вторым каналом передачи данных 2007, содержащимся в приборе (например, в приборе 1024) хирургического устройства (ФИГ. 16A). В некоторых формах второй канал передачи данных 2007 может быть реализован способом, во многом аналогичным со способом реализации канала передачи данных 6006, описанного в этом документе. Контур взаимодействия с прибором 1098 может содержать второй интерфейс канала передачи данных 2010 для обеспечения такого обмена данными. В одной форме второй интерфейс канала передачи данных 2010 может содержать цифровой интерфейс с тремя состояниями, однако могут также использоваться другие интерфейсы. В определенных формах второй канал передачи данных может, как правило, представлять собой любой контур для передачи и/или получения данных. В одной форме, например, второй канал передачи данных может хранить информацию, касающуюся конкретного хирургического аппарата, с которым он связан. Такая информация может содержать, например, номер модели, серийный номер, количество операций, в которых применялось хирургическое устройство и/или любой другой вид информации. В некоторых формах второй канал передачи данных 2007 может хранить информацию об электрических и/или ультразвуковых характеристиках связанного преобразователя 1014, концевого зажима 1026 или ультразвуковой приводной системы. Например, первый канал передачи данных 2006 может указывать на наклон тренировочной частоты, как описано в этом документе. К тому же или в качестве альтернативы, любой тип информации может быть передан второму каналу передачи данных на хранение через второй интерфейс канала передачи данных 2010 (например, используя логическое устройство 2000). Такая информация может содержать, например, обновленное количество операций, в которых использовалось хирургическое устройство и/или даты и/или времена его использования. В определенных формах второй канал передачи данных может передавать данные, полученные одним или несколькими датчиками (например, датчиком температуры прибора). В определенных формах второй канал передачи данных может получать данные от генератора 1002 и передавать пользователю показания (например, индикация с помощью светодиодов или другая визуальная индикация), основанные на полученных данных.
В определенных формах второй канал передачи данных и второй интерфейс канала передачи данных 2010 может быть сконфигурирован таким образом, что обмен данными между логическим устройством 2000 и вторым каналом передачи данных может быть активирован без необходимости предоставления дополнительных проводников, предназначенных для этой цели (например, выделенные проводники провода, соединяющего рукоятку с генератором 1002). В одной форме, например, информация может быть передана к и от второго канала передачи данных с помощью схемы 1-проводной коммуникационной шины, реализованной в существующей проводке, такой как один из проводников, используемых для передачи опрашивающих сигналов от схемы формирования сигналов 2002 к контуру управления в рукоятке. Таким образом, изменения или модификации конструкции хирургического устройства, которые в ином случае могли бы быть необходимы, сведены к минимуму или сокращены. Более того, поскольку различные виды коммуникации, реализуемые по одному физическому каналу, могут быть разделены по диапазону частот, наличие второго канала передачи данных может оставаться «незамеченным» генераторами, не имеющими обязательных функциональных возможностей считывания данных; таким образом, обеспечивается совместимость хирургического аппарата с более ранними версиями.
В определенных формах изолированная платформа 1052 может содержать по меньшей мере один блокировочный конденсатор 2096-1, соединенный с выходом управляющего сигнала 1060b для предотвращения прохождения постоянного тока на пациента. Для соответствия требованиям медицинских регламентов или стандартов может потребоваться один блокировочный конденсатор, например. Хотя сбой работы конструкций с одним конденсатором случается относительно не часто, такой сбой может иметь отрицательные последствия. В одной форме может предоставляться второй блокировочный конденсатор 2096-2, последовательно подключенный к блокировочному конденсатору 2096-1, при этом утечка тока из точки между блокировочными конденсаторами 2096-1, 2096-2 отслеживается, например, с помощью АЦП 2098, чтобы получить образцы напряжения, образуемого утечкой тока. Образцы могут быть получены логической схемой 2000, например. Основываясь на изменениях утечки тока (о чем свидетельствуют образцы напряжения в форме, показанной на ФИГ. 19), генератор 1002 может определить, когда по меньшей мере один из блокировочных конденсаторов 2096-1, 2096-2 дал сбой. Следовательно, форма, показанная на ФИГ. 19, предоставляет преимущество по сравнению с конструкциями с одним конденсатором, имеющими единственную точку сбоя.
В определенных формах неизолированная платформа 1054 может содержать источник электропитания 2011 для вывода мощности постоянного тока с подходящими значениями напряжения и силы тока. Источник электропитания может содержать, например, источник электропитания мощностью 400 Вт, который обеспечивает напряжение в системе, равное 48 В постоянного тока. Источник электропитания 2011 может далее содержать один или более преобразователей постоянного тока в постоянный ток 2013 для получения выходной мощности источника электропитания и генерирования выходной мощности постоянного тока со значениями напряжений и токов, необходимыми для различных компонентов генератора 1002. Как описывалось ранее в связи с контроллером 1096, один или более преобразователей постоянного тока в постоянный ток 2013 может получать входную мощность от контроллера 1096, когда контроллер 1096 обнаруживает активацию пользователем устройства ввода «включения/выключения» 1045, чтобы активировать работу, или пробуждение, преобразователей постоянного тока в постоянный ток 2013.
После описания деталей работы различных форм хирургической системы 19 (ФИГ. 1), 190 (ФИГ. 10), 1000 (ФИГ. 16) можно переходить к дальнейшему описанию работы вышеупомянутой хирургической системы 19, 190, 1000 в рамках процесса разрезания и коагуляции ткани, применяющего хирургический аппарат, содержащий устройство ввода 406, 1045 и генератор 1002. Несмотря на то, что конкретный процесс описан в связи с деталями работы, можно определить, что такой процесс предоставляет только пример того, как можно с помощью любой из хирургических систем 19, 190, 1000 реализовать общие функциональные возможности, описанные в этом документе. Кроме того, данный процесс не обязательно должен выполняться в порядке, представленном в настоящем документе, если не указано иное. Как описано выше, любое из устройств ввода 406, 1045 может быть использовано для программирования ступенчатого выходного сигнала (например, полного сопротивления, тока, напряжения, частоты) хирургических устройств 100 (ФИГ. 1), 120 (ФИГ. 10), 1002 (ФИГ. 16), 1006 (ФИГ. 16).
На ФИГ. 20-22 показаны различные формы логических блок-схем 1200, 1300, 1400, соотнесенные с тканевым алгоритмом для определения момента, когда происходит быстрый нагрев лезвия ультразвукового концевого зажима 1026, и предоставления возможности генерирования визуальной, звуковой и/или тактильной обратной связи и/или изменения режима работы аппарата и/или генератора. Например, обратная связь может предоставляться с помощью выходного индикатора 412 (ФИГ. 9, 11) и/или устройства вывода 1047 (ФИГ. 16) (например, сигнализация, модуляция выходной мощности и/или отображение содержания). В соответствии с настоящим раскрытием, когда для описания элемента, такого как «ультразвуковой хирургический аппарат 100, 120, 1004» применяется множество справочных номеров, следует понимать, что ссылка привязана к любому из элементов, таких как, например, «ультразвуковой хирургический аппарат 100» или «ультразвуковой хирургический аппарат 120» или «ультразвуковой хирургический аппарат 1004». Тем не менее следует понимать, что любой из алгоритмов, описанных в этом документе, подходит для исполнения с любым из аппаратов 100, 120, 1004, описанных в этом документе.
В различных формах обратная связь может предоставляться выходным индикатором 412, показанным на ФИГ. 9 и 11 или устройством вывода 1047, показанным на ФИГ. 16. Такие устройства обратной связи (например, выходной индикатор 412, устройство вывода 1047) особенно полезны для применений, в которых ткань, которой манипулирует концевой зажим 81 (ФИГ. 1), 810 (ФИГ. 10), 1026 (ФИГ. 16), находится вне поля зрения пользователя, и в которых пользователь не видит, когда происходит изменение состояния ткани. Устройство обратной связи сообщает пользователю о том, что произошло изменение состояния ткани, в соответствии с операциями, описанными в связи с логическими блок-схемами 700, 800, 900, 1200, 1300, 1400, соответствующими определенным тканевым алгоритмам. Устройства обратной связи может быть выполнено с возможностью предоставления различных видов обратной связи в соответствии с текущим состоянием ткани. Изменение состояния ткани может быть определено исходя из измерений преобразователя и/или ткани, основанных на измерениях напряжения, силы тока и частоты в соответствии с операциями, описанными, например, в отношении логических блок-схем 700, 800, 900, описанных ранее в связи с ФИГ. 15A-C, и логических блок-схем 1200, 1300, 1400, описанных далее в связи с ФИГ. 20-22, а также различных других логических блок-схем, описанных в этом документе.
В одной форме логические блок-схемы 1200, 1300, 1400 могут быть реализованы в виде исполнительных модулей (например, алгоритмов), содержащих считываемые компьютером команды, подлежащие для исполнения частью процессора 400 (ФИГ. 9, 11, 14) генератора 30, 500 или генератора 1002 (ФИГ. 16, 17, 19). В различных формах, операции, описанные в отношении логических блок-схем 1200, 1300, 1400 могут быть реализованы в виде одного или более программного компонента, например, программы, подпрограммы, логического узла; одного или более компонента аппаратного обеспечения, например, процессора, процессора ОЦС, ПЛУ, ПЛМ, ПЛИС, специализированной ИС, схемы, логической схемы, реестра; и/или комбинаций программного и аппаратного обеспечения. В одной форме, исполнительные команды, предназначенные для выполнения операций, описанных логическими блок-схемами 1200, 1300, 1400, могут храниться в устройстве памяти. При выполнении команд процессор 400, процессор ОЦС 1074 (ФИГ. 19) или логическое устройство 1066 (ФИГ. 19) определяет изменение состояния ткани в соответствии с операциями, описанными в логических блок-схемах 1200 и 1400, и предоставляют обратную связь с пользователем посредством выходного индикатора 412 (ФИГ. 9, 11) или выходного индикатора 1047 (ФИГ. 16, 17). В соответствии с такими исполнительными командами, процессор 400, процессор ОЦС 1074 и/или логическое устройство отслеживает и оценивает образцы сигналов напряжения, силы тока и/или частоты, поступающие от генератора 30, 500, 1002 и, в соответствии с оценкой таких образцов сигналов, определяет, произошло ли изменение состояния ткани. Как более подробно будет описано ниже, изменение состояния ткани может быть определено, исходя из типа ультразвукового хирургического аппарата и уровня мощности, которым запитан аппарат. В ответ на обратную связь, пользователь может контролировать режим работы любого из ультразвуковых хирургических аппаратов 100, 120, 1004 или режим работы любого из ультразвуковых хирургических аппаратов 100, 120, 1004 может контролироваться автоматически или полуавтоматически.
Краткое описание тканевого алгоритма, представленное в виде логических блок-схем 1200, 1300, 1400, будет далее описано в связи с любым из ультразвуковых хирургических аппаратов 100, 120, 1004, приводимых в действие соответствующим генератором 30 (ФИГ. 1), 500 (ФИГ. 10), 1002 (ФИГ. 17). В одном аспекте тканевый алгоритм определяет, когда температура участка лезвия (а, следовательно, и резонанс) ультразвукового концевого зажима 81 (ФИГ. 1), 810 (ФИГ. 10), 1026 (ФИГ. 17) резко изменяется (особый интерес представляет изменение в виде увеличения). Для аппарата, имеющего вид зажима или щипцов, такое изменение может соответствовать обычному клиническому сценарию, кроме прочего, когда в непосредственной близости от лезвия находится минимальное количество ткани (или ткань отсутствует), обрезки ткани или жидкость, и когда лезвие приводится в действие в направлении прихвата, подушки для скобок или другого подходящего элемента, отклоняющего ткань. Для применений, в которых не используется зажим, когда аппарат, оборудованный или не оборудованный прихватом и связанными механизмами, используется для воздействия на ткань, такое изменение соответствует условиям, в которых происходит быстрый нагрев, например, когда лезвие приводится в движение в направлении кости или других твердых материалов, или когда для сочленения лезвия с целевой тканью прилагается избыточное усилие. Эти варианты являются иллюстративными; можно представить другие клинические сценарии, в которых происходит быстрый нагрев лезвия, и для которых описанный в настоящем документе тканевый алгоритм окажется полезным.
Тканевый алгоритм, представленный логическими блок-схемами 1200, 1300, 1400, и любой из алгоритмов, описанных в этом документе, может применяться в сочетании с любыми генераторами 30, 500, 1002, описанными в этом документе, и другими подходящими генераторами, такими как генераторы GEN 04, GEN 11, выпускаемые компанией «Ethicon Endo-Surgery, Inc.», г. Цинциннати, штат Огайо, и сопутствующими приборами, системами, которые могут выгодно использовать алгоритм или технологию, описанную в настоящем документе. Следовательно, при описании тканевого алгоритма в сочетании с блок-схемами 1200, 1300, 1400 нужно сослаться на генераторы 30, 500, 1002, описанные на соответствующих ФИГ. 1-9, 10-13 и 16-19.
Таким образом, как показано на ФИГ. 1-14, частота резонирующей системы лезвия/ рукоятки любого из ультразвуковых хирургических аппаратов 100, 120, 1004 зависит от температуры. Когда, например, ультразвуковой концевой зажим, имеющий вид щипцов, выполняет разрез зажатого участка ткани, лезвие нагревается и сжимает ткань до тех пор, пока в конечном итоге не прорежется сквозь нее. На этом этапе, лезвие располагается напротив тканевой подушки и, если между ними сохраняется давление зажимания, место взаимодействия лезвия и подушки будет передавать мощность посредством механического или вибрационного движения лезвия относительно подушки. Мощность, «направленная» в место такого взаимодействия, будет в большинстве своем передана к кончику лезвия, поскольку материал подушки является относительно изолирующим. Именно тепловая энергия нарушает жесткость кончика лезвия, а резонанс системы будет изменяться в соответствии с такими локальными (для кончика) условиями. Генератор 30, 500, 1002 отслеживает этот резонанс. Пример со щипцами иллюстрирует один сценарий, для которого применяется алгоритм. Дополнительные сценарии представляют собой рассечение на обратном ходу, когда щипцы с прихватом закрыты, рассечение лезвием в направлении жесткой или твердо ткани или любой сценарий, в котором требуется знание температурного состояния концевого зажима лезвия. Тканевый алгоритм, применяющий логические принципы для такого отслеживания резонанса, и, следовательно, температурное состояние кончика лезвия описывается в связи с логическими блок-схемами 1200, 1300, 1400, показанными на ФИГ. 20-22.
К тому же, описание тканевого алгоритма, описанного в связи с логическими блок-схемами 1200, 1300, 1400, будет сопровождаться иллюстративными примерами с помощью данных, полученных с использованием любого из ультразвуковых хирургических аппаратов 100, 120, 1004, содержащих соответствующий генератор 30, 500, 1002, описанный в этом документе.
Тканевый алгоритм, описанный в связи с логическими блок-схемами 1200, 1300, 1400, опирается на мониторинг электрических управляющих сигналов, особенно тех, которые соотносятся с резонансной частотой управляющего сигнала. Алгоритм отслеживает резонансную частоту и ее изменения в зависимости от времени (т.е., первую производную частоты в зависимости от времени). В настоящем описании такое изменение частоты в зависимости от времени называется наклоном частоты. Наклон частоты вычисляется локально (с точки зрения времени) путем вычисления изменения частоты смежных (или сравнительно близких) точек данных и деления на соответствующее изменение времени. Из-за переходных процессов сигнала, может применяться усреднение или любая из амплитуд применимых техник фильтрации или сглаживания (чтобы ходы кривых были более ярко выражены и чтобы предотвратить быстрое включение/выключение множеств условий). Графики, показанные на ФИГ. 62, 63, 64, иллюстрируют вычисление наклона частоты и применение техник усреднения (например, экспоненциально взвешенное скользящее среднее или ЭВСС) для получения значений наклона частоты, используемых в управлении/мониторинге. Другими описаниями наклона частоты являются, без ограничения, «первая производная частоты» и «изменение частоты в зависимости от времени».
На ФИГ. 20 представлена логическая блок-схема 1200 тканевого алгоритма, который может быть реализован в одной форме генератора 30, 500, 1002 и/или бортового генератора или контура управления аппаратом. На общем уровне, тканевый алгоритм, описанный в связи с логической блок-схемой 1200, анализирует электрические сигналы в режиме реального времени с учетом множества логических условий, которые соотносятся с описываемыми условиями (например, лезвие ультразвукового хирургического аппарата быстро нагревается). Соответственно, генератор 30, 500, 1002 определяет, когда множество логических условий имеет место и активирует множество ответных действий. Термины «множество условий» и «множество ответных действий» означают следующее:
(1) Множество условий - множество логических условий, относительно которых выполняется мониторинг электрических сигналов в режиме реального времени.
(2) Множество ответных действий - одно или более действий системы генератора 30, 500, 1002, исполняемых, когда выполняется множество условий.
На этапе 1202 генератор 30, 500, 1002 устанавливается в ультразвуковой приводной режим в состоянии готовности.
На этапе 1204 генератор 30, 500, 1002 активируется на предопределенном уровне мощности N. Когда пользователь активирует хирургическую систему 19, 190, 1000, соответствующий генератор 30, 500, 1002 отвечает поиском резонанса хирургической системы 19, 190, 1000 и затем линейно изменяет выходную мощность на концевые зажимы 81, 810, 1026 до целевых уровней, соответствующих уровню мощности команды.
На этапе 1206 тканевый алгоритм определяет, используются ли параметры, связанные с тканевым алгоритмом, путем определения активации по меньшей мере одного флажка множеств условий/множеств ответных действий. Если ни один из таких флажков не активирован, алгоритм продолжает процедуру вдоль ветви «НЕТ», при этом на этапе 1208 хирургическая система 19, 190, 1000 эксплуатируется в нормальном ультразвуковом режиме, а на этапе 1210, соответствующий генератор 30, 500, 1002 деактивируется по завершении тканевой процедуры.
Если по меньшей мере один флажок настройки множеств условий/множеств ответных действий активирован, алгоритм продолжает процедуру вдоль ветви «ДА», и генератор 30, 500, 1002 использует оценку сигнала тканевого алгоритма 1300 после сброса таймера X и защелки таймера X. Тканевый алгоритм 1300, более подробно описанный далее, может возвращать индикацию о том, выполняется или «истинно» ли данное множество условий в настоящий момент. В одной форме, по меньшей мере один флажок для настройки множеств условий/множеств ответных действий может храниться в образе ЭСППЗУ аппарата 100, 120, 1004, закрепленном за соответствующим генератором 30, 500, 1002. Флажки ЭСППЗУ для установки множеств условий/множеств ответных действий в активированное состояние приведены в ТАБЛИЦЕ 1.
В одной форме часть тканевого алгоритма 1300, выполняющая оценку сигнала, входящая в состав логической блок-схемы 1200, применяет два множества условий, а каждое из этих двух множеств условий имеет множество ответных действий, описанных более подробно в связи с логическими блок-схемами 1300, 1400. Логика 1300 тканевого алгоритма может быть проиллюстрирована следующим образом: когда выполняется множество условий 1, активируется множество ответных действий 1. Наличие двух множеств условий активирует иерархический ответ (дифференцированные ответные действия, основанные на уровне условий), а также предоставляют способность управлять сложной последовательностью событий.
На этапе 1210 запускаются ответные действия для выполняемых множеств условий. Цикл 1212 повторяется до тех пор, пока выполняются множества условий, а на этапе 1214 генератор 30, 500, 1002 деактивируется.
Пульсирующий ответ содержит больше деталей, чем относительно простые аудио и ЖК-экранные ответы, и требует дальнейшего пояснения. Когда запускается пульсирующий ответ, генератор 30, 500, 1002 передает пульсирующий выходной сигнал, определяемый следующими четырьмя параметрами:
(1) Амплитуда первого импульса (параметр ЭСППЗУ, одно значение для каждого уровня мощности) - амплитуда привода для первого импульса;
(2) Время первого импульса (параметр ЭСППЗУ) - время, на протяжении которого подается амплитуда первого импульса;
(3) Амплитуда второго импульса (параметр ЭСППЗУ, одно значение для каждого уровня мощности) - амплитуда привода для второго импульса; и
(4) Время второго импульса (параметр ЭСППЗУ) - время, на протяжении которого подается амплитуда второго импульса.
В определенных формах амплитуда первого импульса и амплитуда второго импульса могут увеличиваться, уменьшаться или оставаться одинаковыми по отношению друг к другу. Например, в определенных формах амплитуда первого импульса и амплитуда второго импульса могут быть равными. Также, в определенных формах время действия первого импульса и время действия второго импульса могут принимать любые подходящие значения, в том числе, например, доли секунды, минуты, часы и т.д. В одной возможной форме время действия первого импульса и время действия второго импульса может составлять 55 секунд.
Подавая импульсный сигнал, генератор 30, 500, 1002 подает первый импульс, затем второй импульс, а затем повторяет эту последовательность. Амплитуда импульса может выражаться в: процентах от исходящего тока заданного уровня мощности. Заданный уровень мощности может быть установлен с помощью ключа активизации (МИН или МАКС) и настроек генератора при активированном режиме МИН.
На ФИГ. 21 представлена логическая блок-схема 1300 части тканевого алгоритма оценки сигнала, которая является частью тканевого алгоритма, показанного на ФИГ. 20, которая может быть применена в одной форме генератора. Тканевый алгоритм 1300 может определять, выполняется ли одно или несколько множество условий (а, следовательно, должны ли запускаться множества ответных действий на этапе 1210). Порядок действий при оценке сигнала тканевым алгоритмом, показанный на ФИГ. 21, показывает применение параметра «время ожидания» 1304 и вычисление наклона частоты (также называемого локальный наклон частоты, поскольку является вычислением, выполняемым в ходе реализации алгоритма).
На этапе 1302 алгоритм вычисляет время с момента активации на этапе 1204 (ФИГ. 20). Это время выражается как TElapse, которое равно TSytem-TPowerOn. Как описано выше, когда пользователь активирует хирургическую систему 19, 190, 1000, соответствующий генератор 30, 500, 1002 отвечает поиском резонанса ультразвуковой системы 100, 120, 1004 и затем линейно изменяет выходную мощность на концевые зажимы 81, 810, 1026 о целевых уровней, соответствующих уровню мощности команды.
В это время связанные сигнальные переходные процессы могут сделать применение логики алгоритма затруднительным. Таким образом, алгоритм применяет параметр «время ожидания» 1304, хранимый в ЭСППЗУ, расположенном в рукоятке ультразвукового хирургического аппарата 100, 120, 1004. Параметр «время ожидания» 1304 (параметр ЭСППЗУ) определяется как время в начале активации, во время которого генератор 30, 500, 1002 не применяет тканевый алгоритм для уменьшения влияния поиска резонанса и передачи линейных сигнальных переходных процессов к логике алгоритма. Характерное значение параметра «время ожидания» 1304 приблизительно составляет от 0,050 до 0,600 секунд (от 50 до 600 мс).
На этапе 1306 TElapse сравнивается со значением параметра «время ожидания» 1304. Если TElapse меньше или равно значению параметра «время ожидания» 1304, алгоритм продолжает выполнение процедур вдоль ветки «НЕТ» для вычисления на этапе 1302 нового значения TElapse. Если TElapse больше значения параметра «время ожидания» 1304, алгоритм продолжает выполнение процедуры вдоль ветки «ДА» для оценивания сигнала.
На этапе 1308 алгоритм выполняет оценку сигнала/функцию мониторинга. Как указывалось ранее, одним из аспектов функционального алгоритма является мониторинг наклона частоты. В физическом смысле наклон частоты соотносится с тепловым потоком в или из колебательной системы, содержащей лезвие и акустический сборочный узел рукоятки, такой как ультразвуковые системы 100, 120, 1004, описанные в этом документе. В изменениях частоты и наклона частоты во время активации на ткани преобладают изменяющиеся условия, имеющие место вблизи концевого зажима (обезвоживание, отделение ткани и контактирование лезвия с подушкой прихвата). Когда лезвие нагревается (т.е., тепловой поток направлен к лезвию), наклон частоты отрицательный. Когда лезвие охлаждается (т.е., тепловой поток направлен от лезвия), наклон частоты положителен. Соответственно, алгоритм вычисляет наклон между точками данных частоты, т.е., входящие точки данных частоты 1310 (Ft) и предыдущие Ft точки данных 1312. Расчетный наклон частоты также может называться локальный наклон частоты, поскольку он представляет собой расчет во время выполнения алгоритма. Локальный наклон частоты может обозначаться как FSlope_Freq, Ft, которое представляет собой наклон частоты (FSlope_Freq) при резонансной частоте (Ft). Локальный наклон частоты может быть направлен к множеству условий 1, множеству условий 2 1400, например, для оценки в соответствии с блок-схемой 1400, показанной на ФИГ. 22. Хотя показано два множества условий, следует понимать, что в некоторых возможных формах могут быть добавлены дополнительные множества условий.
На ФИГ. 22 представлена логическая блок-схема 1400 для оценки множеств условий для тканевого алгоритма оценки сигнала, показанного на ФИГ. 21, который может быть реализован в одной форме генератора, такого как 30, 50, 1002. Логическая блок-схема 1400 оценивает множество условий X, в которых X представляет собой либо 1, либо 2, например.
В соответствии с тканевым алгоритмом, на этапе 1402, локальный наклон частоты, вычисленный на этапе 1308 (ФИГ. 21) сравнивается со значением порогового параметра наклона частоты 1404 для множества условий X при уровне мощности N. Пороговые параметры наклона частоты 1404 могут храниться в ЭСППЗУ, расположенном в присоединенном аппарате 100, 120, 1004, причем для каждого уровня мощности сохраняется одно значение параметра ЭСППЗУ. Если локальный наклон частоты, рассчитанный на этапе 1308, опускается ниже значения порогового параметра наклона частоты 1404, на этапе 1210 (ФИГ. 20) может быть запущено первое множество ответных действий. Если лезвие нагревается относительно быстро, наклон частоты становится более отрицательным, и тканевый алгоритм определит это условие как падение наклона частоты ниже значения порогового параметра наклона частоты 1404. Итак, наклон частоты означает скорость температурного изменения или тепловой поток к или от лезвия.
В соответствии с тканевым алгоритмом, также на этапе 1402, резонансная частота сравнивается со значением порогового параметра частоты 1406 для множества условий X. Значение порогового параметра частоты 1406 может храниться в ЭСППЗУ, расположенном в присоединенном аппарате 100, 120, 1004. Когда резонансная частота падает ниже значения порогового параметра частоты 1406, на этапе 1210 (ФИГ. 20) может быть запущено второе множество ответных действий. Поскольку лезвие постоянно нагревается, частота будет продолжать падать. Значение порогового параметра частоты 1406 призвано повысить устойчивость алгоритма путем предоставления дополнительной информации о температурном состоянии лезвия (в дополнение к более динамичному индикатору, наклону частоты). Падение частоты от некоторого известного условия, например, комнатной температуры, представляет эффективную индикацию температурного состояния колебательной системы относительно таких известных температурных условий.
В некоторых формах наклон частоты и резонансная частота могут использоваться в одном множестве условий. Например, множество условий может не выполняться до тех пор, пока и наклон частоты, и резонансная частота не достигнут заданных пределов. Например, на этапе 1402, когда наклон частоты (FSlope_Freq) меньше значения порогового параметра наклона частоты 1404, и резонансная частота (Ft) меньше значения порогового параметра частоты 1406, алгоритм продолжает выполнение процедуры вдоль ветки «ДА» до этапа 1408, чтобы задать шаг для таймера X (где X соответствует конкретному множеству условий, анализируемому тканевым алгоритмом).
При сравнении электрических сигналов, например, наклона частоты (FSlope_Freq) и резонансной частоты (Ft) с соответствующими пороговыми параметрами 1404, 1406, гранитные условия, при которых сигнал отскакивает то вперед, то назад через предел, могут быть учтены следующим образом. В одном аспекте, тканевый алгоритм применяет значение параметра «требуемое время до запуска» 1412 (которое также может храниться в ЭСППЗУ аппарата) для конкретного множества условий X, чтобы учесть такую компенсацию. Значение параметра «требуемое время до запуска» 1412 определяется как время, которое должно пройти до запуска (параметр ЭСППЗУ) - время, которое необходимо для того, чтобы наклон частоты и/или частота стали меньше их соответствующих пределов для множества ответных действий, которые необходимо запустить. Этот параметр предназначен для предотвращения частого запуска ответных действий «то в одну сторону, то в другую». Однако, отслеживание не быстрого запуска ответных действий «то в одну сторону, то в другую» может иметь свои преимущества.
Таким образом, на этапе 1414 алгоритм определяет, что больше - значение таймера X или значение параметра «требуемое время до запуска» 1412 для множества условий X. Если значение таймера X больше значения параметра «требуемое время до запуска» 1412, алгоритм продолжает выполнение процедуры вдоль ветки «ДА», чтобы установить защелку для множества условий X на этапе 1416. Выходной сигнал 1418 указывает на выполнение множества условий X. Когда значение таймера X меньше или равно значению параметра «требуемое время до запуска» 1412, алгоритм продолжает выполнение процедуры вдоль ветки «НЕТ», чтобы на выходе 1420 показать, что множество условий X не выполняется.
На этапе 1402, если либо наклон частоты (FSlope_Freq) выше или равен значению порогового параметра наклона частоты 1404, либо резонансная частота (Ft) больше или равна значению порогового параметра частоты 1406, алгоритм продолжает выполнение процедуры вдоль ветки «НЕТ», чтобы сбросить таймер X на этапе 1410 (где X соответствует конкретному множеству условий, анализируемому тканевым алгоритмом).
Дополнительную устойчивость алгоритму обеспечивает применение двух защелкивающих параметров. Если защелкивание не применяется, то алгоритм сконфигурирован таким образом, чтобы завершать множество ответных действий, либо (a) если система деактивируется, либо (b) когда сигнал или сигналы перестают быть меньше их соответствующих пределов, могут применяться два защелкивающих параметра. Это параметр «минимальное время защелкивания» 1422 и параметр «предел перекрестно-обратного наклона частоты» 1424. Эти защелкивающие параметры 1422, 1424 важны для устойчивости, если: (a) поверхности подушки прихвата становятся более смазанными при повышенных температурах и (b) выходная мощность пульсирует, когда ожидаются сигнальные переходные процессы при передаче импульсов.
Параметр минимального времени защелкивания 1422 (параметр ЭСППЗУ) может определяться как минимальное время, необходимое для запуска ответа(-ов) на множество условий X. Компенсация минимального времени защелкивания подразумевает: (a) промежуток времени, требуемый для проигрывания запущенного звукового ответа (например, в одной форме, «предупреждающий» аудио файл формата WAV может длиться приблизительно 0,5 секунд), (b) характерное (от приблизительно 0,5 до 1,0 с) или экстремальное (от приблизительно 1,5 до 2,0 с) время реакции пользователя на событие или (c) характерное время перезахвата ткани при множественном разрезе (называемое «марш») (приблизительно 1,1-2,0, в среднем приблизительно 1,6 секунд).
Перекрестно-обратный пороговый параметр наклона частоты 1424 (параметр ЭСППЗУ) может определяться как предел наклона частоты, превышение которого останавливает выполнение ответных действий (т.е., ответные действия больше не активны). Это обеспечивает более высокий «перекрестно-обратный превышающий» предел наклона частоты, задачей которого является распознавание между активацией в направлении подушки и открытых браншей (в отличие от распознавания между активацией на ткани и активацией на подушке).
В соответствии с частью тканевого алгоритма, представленной логической блок-схемой 1400, после сброса таймера X на этапе 1410, на этапе 1426, тканевый алгоритм определяет, установлена ли защелка для множества условий X или для перекрестно-обратного наклона частоты. Если ни одна из защелок не установлена, алгоритм продолжает выполнение процедуры вдоль ветки «НЕТ», чтобы определить на выходе 1420, что множество условий X не выполняется. Если установлена хотя бы одна любая защелка, алгоритм продолжает выполнение процедуры вдоль ветки «ДА» до этапа 1428.
На этапе 1428 алгоритм определяет, превышает ли время защелкивания для множества условий X значение параметра минимального времени защелкивания 1422 для множества условий X, и превышает ли наклон частоты (FSlope_Freq) значение перекрестно-обратного порогового параметра наклона частоты 1424 алгоритм продолжает выполнение процедуры вдоль ветки «ДА», чтобы сбросить защелку для таймера X на этапе 1430 и чтобы указать на выходе 1420, что множество условий X не выполняется. Если время защелкивания для множества условий X меньше или равно значению параметра минимального времени защелкивания 1422 для множества условий X, а наклон частоты (FSlope_Freq) меньше или равен значению перекрестно-обратного ого параметра наклона частоты 1424, алгоритм продолжает выполнение процедуры вдоль ветки «НЕТ», чтобы указать на выходе 1432, что множество условий X выполняется.
Как показано на ФИГ. 21 и 22, существует два идентичных множества условий 1 и 2 с точки зрения хода выполнения. Эти множества условий 1 и 2 имеют дублированные множества параметров, перечисленные в ТАБЛИЦЕ 2. Параметры алгоритма, общие для множеств условий 1 и 2 перечислены в ТАБЛИЦЕ 3.
В ТАБЛИЦЕ 2 представлен краткий обзор дублированных параметров ЭСППЗУ алгоритма для каждого из множеств условий и количество параметров для каждого множества условий.
Краткий обзор параметров ЭСППЗУ алгоритма, дублированные параметры для каждого из множеств условий
В ТАБЛИЦЕ 3 представлен краткий обзор общих для каждого из множеств условий параметров ЭСППЗУ алгоритма (не дублированных параметров ЭСППЗУ) и количество параметров.
Краткий обзор параметров ЭСППЗУ алгоритма, общие параметры для всех множеств условий
Следует пояснить, что тканевый алгоритм, описанный в связи с логическими блок-схемами 1200, 1300, 1400, показанными на соответствующих ФИГ. 20-22, далее будет описан в рамках четырех примеров. Основным применением тканевого алгоритма является мониторинг наклона частоты, резонансной частоты или обоих из вышеперечисленных параметров относительно их соответствующих пределов. Таким образом, первый пример описывает мониторинг наклона частоты относительно его соответствующего предела, как показано на ФИГ. 23-28. Второй пример описывает мониторинг резонансной частоты относительно ее соответствующего предела, как показано на ФИГ. 29-31. Третий пример описывает мониторинг и наклона частоты, и резонансной частоты относительно их соответствующих пределов, как показано на ФИГ. 32-34. И наконец, четвертый пример также описывает мониторинг и наклона частоты, и резонансной частоты относительно их соответствующих пределов.
Пример 1. Мониторинг наклона частоты относительно соответствующего предела.
Первый пример описывает мониторинг наклона частоты относительно его соответствующего предела со ссылкой на ФИГ. ФИГ. 23-28. Первый, наиболее простой пример, представляет собой пример запуска множества ответных действий на основании только наклона частоты. В ТАБЛИЦЕ 4 представлены репрезентативные параметры для этой задачи для хирургических аппаратов, таких как любой из хирургических аппаратов 19, 190, 1000, описанных в этом документе, содержащих соответствующий ультразвуковой хирургический аппарат, такой как ультразвуковые хирургические аппараты 100, 120, 1004, описанные в этом документе.
Репрезентативные параметры для запуска звуковой индикации с помощью только предела наклона частоты (применяется одно множество условий)
уровень 4: -0,053 кГц/с
уровень 3: -0,045 кГц/с
уровень 2: -0,038 кГц/с
уровень 1: -0,030 кГц/с
На ФИГ. 23-25 показаны данные сигнала, генерируемого генератором для репрезентативных/иллюстративных параметров, перечисленных в ТАБЛИЦЕ 4. Генератор может быть аналогичным любому генератору 30, 500, 1002, описанному в этом документе, который составляет часть соответствующей хирургической системы 19, 190, 1000, работающей в ультразвуковом режиме (например, ультразвуковая система 19, 190, 1000), применяемом к ткани в соответствии с настоящим раскрытием.
Использование только наклона частоты для запуска множества ответных действий может быть далее продемонстрировано в ходе сценария «приработки оборудования». На ФИГ. 26-28 показаны данные сигнала, генерируемого генератором для репрезентативных/иллюстративных параметров, перечисленных в ТАБЛИЦЕ 4, во время сценария «приработки оборудования». Сценарий «приработки оборудования» симулирует случай, когда пользователь активирует щипцеподобный ультразвуковой хирургический аппарат, не зажимая ткань (например, обратный разрез с закрытыми браншами). Такая проверка также может быть использована для количественной оценки таких характеристик, как например, «время ответа».
Время ответа ультразвукового хирургического аппарата может быть определено как время, необходимое ультразвуковой системе (аппарату, рукоятку и генератору с тканевым алгоритмом) для выполнения действия в ответ на контакт подушки прихвата с лезвием. Ультразвуковая система обычно изначально активируется «в воздухе» (т.е., без нагрузки), прихват закрывается к лезвию и удерживается на протяжении некоторого промежутка времени, после чего прихват открывается, а ультразвуковая система деактивируется. Время ответа представляет собой время между точкой, в которой статическая мощность (мощность в воздушной среде) начинает изменяться из-за того, что подушка прихвата входит в контакт с лезвием, и точкой, в которой запускается множество ответных действий. Эта проверка также позволяет дать количественную оценку скорости охлаждения - чем выше скорость охлаждения (при аналогичных конвекционных граничных условиях), тем больше тепловой энергии или остаточного тепла присутствует в лезвии. Скорость охлаждения пропорциональная наклону частоты (следует подчеркнуть, что положительное значение наклона частоты соотносится к текущему оттоку тепла от лезвия). Далее будет подробнее описано, что скорость охлаждения также может быть отслежена и использована в целях контроля следующим образом, например: если скорость охлаждения, определяемая положительным наклоном частоты большего значения, понятно, что лезвие «несет» большое количество тепловой энергии и быстро его рассеивает.
На ФИГ. 23A представлена логическая блок-схема 1500 изменения наклона частоты в зависимости от времени для волновой формы 1502 одной формы генератора во время характерного разреза ткани. Наклон частоты (кГц/с) представлен вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси для характерного разреза ткани с применением любой из ультразвуковых систем, содержащих соответствующие ультразвуковые хирургические аппараты, установленные на уровень мощности 5. Предел наклона частоты 1504, использованный для этого применения, составил -0,06 кГц/с и показан горизонтальной пунктирной линией. Вертикальная штрихпунктирная линия 1506 изображает время (2,32 секунды), когда ткань начала отделяться, а вертикальная пунктирная линия 1508 изображает время (2,55 секунды), когда ультразвуковая система запустила множество ответных действий (в данном случае, в соответствии с ТАБЛИЦЕЙ 4, только слышимый звуковой сигнал).
На ФИГ. 23B приведено графическое представление волновой формы производной второй степени частоты (наклона частоты) в зависимости от времени (показано пунктиром), наложенной на волновую форму 1502, изображенную на ФИГ. 23, для одной формы генератора во время обычного разреза ткани.
На ФИГ. 24 представлено графическое представление 1510 волновой формы частоты в зависимости от времени 1512 одной формы генератора во время обычного разреза ткани, относящееся к графическому представлению 1500, показанному на ФИГ. 23A. Резонансная частота (кГц) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси для характерного разреза ткани с применением любой из ультразвуковых систем, установленных на уровень мощности 5. Вертикальная штрихпунктирная линия 1506 изображает время (2,32 секунды), когда ткань начала отделяться, а вертикальная пунктирная линия 1508 изображает время (2,55 секунды), когда ультразвуковая система запустила множество ответных действий (в данном случае, только слышимый звуковой сигнал).
На ФИГ. 25 представлено графическое представление 1514 волновой формы потребления мощности в зависимости от времени 1514 одной формы генератора во время обычного разреза ткани, относящееся к графическому представлению 1500, показанному на ФИГ. 23A. Мощность (Вт) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси для характерного разреза ткани с применением любой из ультразвуковых систем, установленных на уровень мощности 5. Вертикальная штрихпунктирная линия 1506 изображает время (2,32 секунды), когда ткань начала отделяться, а вертикальная пунктирная линия 1508 изображает время (2,55 секунды), когда ультразвуковая система запустила множество ответных действий (в данном случае, только слышимый звуковой сигнал).
На ФИГ. 26 приведено графическое представление 1516 волновой формы наклона частоты в зависимости от времени 1518 для одной формы генератора во время приработки оборудования. Параметры для этой проверки сопоставимы с параметрами в ТАБЛИЦЕ 4. Наклон частоты (кГц/с) представлен вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси для характерного разреза ткани с применением любой из ультразвуковых систем, установленных на уровень мощности 5. Предел наклона частоты 1504, использованный для этого применения, составил -0,06 кГц/с, как показано горизонтальной пунктирной линией. Вертикальная точечная линия 1524 изображает точку в зависимости от времени (2,49 секунда), когда статическая мощность начинает изменяться в связи с зажиманием, вертикальная штрихпунктирная линия 1506 показывает время (2,66 секунды), когда мощность завершила линейное увеличение, а вертикальная пунктирная линия 1508 изображает время(2,72 секунды), когда ультразвуковая система запустила множество ответных действий (в данном случае только слышимый звуковой сигнал). Как показано в графическом представлении 1516, наклон частоты на этапе 1520 соотносится со скоростью охлаждения или оттоком тепла от лезвия. Также, время ответа 1522 ультразвуковой системы измеряется как время, проходящее между точкой в зависимости от времени (2,49 секунды), когда статическая мощность начинает изменяться в связи с зажатием и временем (2,72 секунды), когда ультразвуковая система запускает множество ответных действий.
На ФИГ. 27 представлено графическое представление 1524 волновой формы частоты в зависимости от времени 1526 одной формы генератора во время приработки оборудования, относящееся к графическому представлению 1516, показанному на ФИГ. 26 Резонансная частота (кГц) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси для характерного разреза ткани с применением любой из ультразвуковых систем, установленных на уровень мощности 5.
На ФИГ. 28 представлено графическое представление 1528 волновой формы потребления мощности в зависимости от времени 1530 одной формы генератора во время приработки оборудования, относящееся к графическому представлению 1516, показанному на ФИГ. 26 Мощность (Вт) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси для характерного разреза ткани с применением любой из ультразвуковых систем, установленных на уровень мощности 5.
Пример 2. Запуск множества ответных действий с применением только предела частоты.
Второй пример описывает запуск множества ответных действий на основе только предела частоты со ссылкой на ФИГ. 29-35. В ТАБЛИЦЕ 5 представлены репрезентативные параметры для этой задачи для хирургических аппаратов, таких как любой из хирургических аппаратов 19, 190, 1000, описанных в этом документе, содержащих соответствующий ультразвуковой хирургический аппарат, такой как ультразвуковые хирургические аппараты 100, 120, 1004, описанные в этом документе. Следует понимать, что запуск с помощью предела частоты может применяться с ограничениями, поскольку он дает меньше представления о динамических условиях концевого зажима и представлен в настоящем документе для полноты раскрытия. Включение наклона частоты в тканевый алгоритм, описанный в связи с логическими блок-схемами 1200, 1300, 1400, направлено на использование в комбинированной логике (в комбинации с использованием предела наклона частоты), описанной в следующем разделе настоящего документа.
Репрезентативные параметры для запуска звуковой индикации с помощью только предела частоты
(применяется одно множество условий)
уровень 4: 1,00 кГц/с*
уровень 3: 1,00 кГц/с*
уровень 2: 1,00 кГц/с*
уровень 1: 1,00 кГц/с*
На ФИГ. 29-34 показаны волновые формы, генерируемые генератором для репрезентативных/иллюстративных параметров, перечисленных в ТАБЛИЦЕ 5. Генератор может быть аналогичным любому генератору 30, 500, 1002, описанному в этом документе, который составляет часть соответствующей хирургической системы 19, 190, 1000, работающей в ультразвуковом режиме (например, ультразвуковая система 19, 190, 1000), применяемом к ткани в соответствии с настоящим раскрытием.
Выбор 55,100 Гц в качестве предела частоты в ТАБЛИЦЕ 5 основан на данных испытаний для двух случаев неправильной эксплуатации: (1) когда ультразвуковой хирургический аппарат активируется в направлении подушки ткани в течение длительного промежутка времени; и (2) когда ультразвуковой хирургический аппарат применяется для выполнения 10 последовательных разрезов на иссеченной ткани свиного тонкого кишечника с наиболее высокой возможной скоростью при постоянно включенном генераторе. Оба из этих случаев неправильной эксплуатации будут более подробно раскрыты со ссылкой на соответствующие ФИГ. 29 и ФИГ. 30-31A-C.
На ФИГ. 29 представлено графическое представление 1600 изменения частоты 1602 в зависимости от времени для волновых форм нескольких генераторов во время приработки оборудования. Изменение частоты (кГц) спустя X секунд приработки оборудования показано вдоль вертикальной оси, а количество ультразвуковых хирургических аппаратов показано вдоль горизонтальной оси. На ФИГ. 29 показаны данные изменения частоты после длительных приработок ультразвукового хирургического аппарата, когда ультразвуковой хирургический аппарат активируется в направлении подушки ткани в течение длительного промежутка времени (продолжительная приработка). Выбор 55,100 Гц ограничивает это условие диапазоном времени не более 4 секунд или падением частоты приблизительно 700 Гц от номинальной резонансной частоты для комнатной температуры, равной 55,800 Гц. Данные изменения частоты 16021, 16022, 16023, 16024 были взяты из данных генератора 30, 500, 1002 в точках, соответствующих 1, 2, 3 и 4 секундам с начала приработки. Номинальная стартовая частота для пяти ультразвуковых хирургических аппаратов составила 55,8 кГц (лезвия запущены при комнатной температуре). Второе и пятое устройства продолжали работать недостаточно долго для генерации полного набора данных для всех промежутков времени.
На ФИГ. 30 приведено графическое представление 1604 изменения волновых форм нормализованного комбинированного полного сопротивления, тока и частоты в зависимости от времени и в зависимости от потребления мощности, подачи энергии и температуры для одной формы генератора, соединенного с соответствующим ультразвуковым хирургическим аппаратом, используемым для выполнения 10 последовательных разрезов на ткани (например, на иссеченной ткани свиного тонкого кишечника) с наиболее высокой возможной скоростью при постоянно включенном генераторе. Эти данные и способы, используемые для их получения, представляют условия неправильного применения.
Репрезентативные данные, показанные на ФИГ. 30, более четко показаны со ссылкой на ФИГ. 31A-C. На ФИГ. 31A приведено графическое представление 1606 волновой формы изменения полного сопротивления в зависимости от времени 1608 и волновой формы изменения силы тока в зависимости от времени 1610 одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени. Полное сопротивление (Ом) и сила тока (мА) представлены вдоль вертикальной оси, а время (с) - вдоль горизонтальной оси.
На ФИГ. 31B приведено графическое представление 1612 волновой формы резонансной частоты 1614 в зависимости от времени для сигнала одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени. Резонансная частота (кГц) представлена вдоль вертикальной оси, а время (с) - вдоль горизонтальной оси.
На ФИГ. 31C приведено графическое представление 1616 волновой формы мощности 1618, волновой формы энергии 1620 и волновой формы температуры 1622 в зависимости от времени одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени. Мощность (Вт), энергия (Дж) и температура (C) представлены вдоль горизонтальной оси, а время (с) - вдоль горизонтальной оси.
Соответственно, со ссылкой на ФИГ. 31A-C, как показано в графическом представлении 1612, можно увидеть, что кривая резонансной частоты 1614 опустилась на 700 Гц (с 55,8 кГц до 55,1 кГц) на этапе 1615 во время третьего разреза (который представляет собой особенно неправильный разрез при нагрузке ткани на кончик). После того как волновая форма резонансной частоты 1614 опустилась на 700 Гц (с 55,8 кГц до 55,1 кГц) во время третьего разреза, ультразвуковой хирургический аппарат начинает насыщать генератор, и волновая форма тока 1610 немного наклоняется во всех последующих разрезах. Поскольку волновая форма управляющего тока 1610 пропорциональна смещению кончика лезвия, наклон волновой формы тока 1610 замедляет воздействие ткани, а следовательно, снижает интенсивность поглощения энергии (и скорость нагрева, т.е., наклон частоты менее отрицателен). Управление таким изменением в результате наклона волновой формы тока 1610 в рамках последовательности применения возможно с использованием как изменения частоты, так и изменения наклона частоты, как будет описано далее в связи с примерами 3 и 4 в последующих разделах настоящего документа.
На ФИГ. 32 приведено комбинированное графическое представление 1630 волновой формы частоты 1632, волновой формы взвешенного наклона частоты 1634 (рассчитанного с помощью экспоненциально-взвешенного скользящего среднего со значением альфа 0,1) и волновой формы температуры 1636 в зависимости от времени, генерированных генератором, аналогичным одной форме генераторов, описанных в этом документе. Резонансная частота для комнатной температуры ультразвуковой системы (продольный режим) была немного выше резонансной частоты, для которой составлена ТАБЛИЦА 5. Следовательно, предел частоты 1633 увеличили соответственно с 55 100 Гц, указанных в ТАБЛИЦЕ 5, до приблизительно 55 200 Гц, как показано на ФИГ. 33 пунктирной линией. Активация выполнялась на ткани (например, на иссеченной ткани тонкого кишечника свиньи) с помощью ультразвуковой системы с резонансом комнатной температуры приблизительно 55,9 кГц, установленным для уровня мощности 5. Отделение ткани происходит через 6,25 секунд; одна сторона ткани отделяется от лезвия через приблизительно 8 секунд; полное отделение происходит через приблизительно 10 секунд. На ФИГ. 33 приведено графическое представление волновой формы частоты в зависимости от времени 1632 одной формы генератора 30, 500, 1002. Частота (кГц) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси. На ФИГ. 33 показан пример использования только предела частоты 1633 с применением параметров, совместимых с параметрами, перечисленными в ТАБЛИЦЕ 5, но отрегулированных до приблизительно 55 200 Гц, что изображено пунктирной линией 1633. Резонансная частота 1632 пересекает предел частоты 1633 (пунктирная горизонтальная линия - заданное значение на 700 Гц ниже резонанса комнатной температуры) приблизительно в точке 11 секунд, и в этот момент может быть запущено множество ответных действий.
На ФИГ. 34 приведено графическое представление 1634 волновой формы взвешенного наклона частоты в зависимости от времени 1634 для одной формы генератора. Взвешенный наклон частоты (кГц/с) представлен вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси. Волновая форма наклона частоты 1634 рассчитывается с помощью экспоненциально-взвешенного скользящего среднего со значением альфа 0,1. На ФИГ. 34, волновая форма наклона частоты 1634 пересекает предел наклона частоты 1635 (пунктирная горизонтальная линия), и множество ответных действий может быть запущено приблизительно в точке 5,8 секунд.
Оставшиеся примеры 3 и 4 относятся к применению нескольких множеств условий, которые требуют более сложного применения тканевого алгоритма, и описывают мониторинг наклона частоты и/или частоты относительно их соответствующих пределов и могут содержать иерархический подход к запуску множеств ответных действий.
Пример 3. Запуск множества ответных действий на основе предела наклона частоты и предела частоты.
Третий пример описывает запуск множества ответных действий на основе как предела наклона частоты, так и предела частоты. В ТАБЛИЦЕ 6 представлены репрезентативные параметры для этой задачи для хирургических аппаратов, таких как любой из хирургических аппаратов 19, 190, 1000, описанных в этом документе, содержащих соответствующий ультразвуковой хирургический аппарат, такой аппараты как ультразвуковые хирургические аппараты 100, 120, 1004, описанные в этом документе.
Репрезентативные параметры для запуска звуковой индикации с помощью предела наклона частоты и предела частоты
(применяется два множества условий)
уровень 4: -0,053 кГц/с
уровень 3: -0,045 кГц/с
уровень 2: -0,038 кГц/с
уровень 1: -0,030 кГц/с
уровень 4: 1,00 кГц/с*
уровень 3: 1,00 кГц/с*
уровень 2: 1,00 кГц/с*
уровень 1: 1,00 кГц/с*
В этом случае примера 3 показан многоуровневый или иерархический ответ. Комбинированная логика предела наклона частоты и предела частоты далее описывается с использованием тех же графических изображений, которые показаны на ФИГ. 32-34. На ФИГ. 34 множество условий 1 запускается волновой формой наклона частоты 1634, которая пресекает значение предела наклона частоты 1635 приблизительно в точке 6 секунд. Множество ответных действий для множества условий 1 может содержать, например, низкоуровневый звуковой индикатор. По мере того как пользователь продолжает активировать аппарат с минимальным количеством ткани в концевом зажиме, запускается множество условий 2, поскольку резонансная частота падает ниже предела частоты 1633 приблизительно в точке 11 секунд, как показано на ФИГ. 33. Множество ответных действий для множества условий 2 может представлять собой более высокий звуковой индикатор, например.
Пример 4. Запуск множества ответных действий на основе предела наклона частоты и предела частоты.
Четвертый пример распространяется на применение как предела частоты, так и предела наклона частоты во время неправильных условий эксплуатации хирургического аппарата. По разным причинам сигнальные уровни наклона частоты могут ослабляться (т.е., становиться менее отрицательными) при расширенном применении.
При неправильных условиях эксплуатации, волновые формы частоты, наклона частоты и силы тока могут отклоняться от нормальной работы, что может генерироваться во время постоянной активации ультразвукового хирургического аппарата на уровне мощности 5, при котором бранши ультразвукового хирургического аппарата открываются на 1 секунду и затем закрываются на одну секунду с 17-кратным повторением этого цикла.
Когда ультразвуковой хирургический аппарат активируется множество раз в направлении подушки, волновая форма наклона характеристической частоты в первой области, до того как генератор насыщается, становится менее отрицательной, чем во второй области, после того как произошло насыщение генератора благодаря во многом КПД системы и результирующему смещению/падению силы тока. В ненасыщенной области волновой формы наклона частоты еще не произошло насыщение ультразвуковой системы, и ток поддерживается на или вблизи целевой величины силы тока для уровня мощности 5. В области насыщения волновой формы наклона частоты сила тока (а, следовательно, и смещение кончика лезвия) постоянно падает, вызывая увеличение наклона частоты (скорость нагрева падает). Следует отметить, что после нескольких неправильных циклов работы, например, после четвертого неправильного цикла, который приблизительно является границей между ненасыщенной областью и областью насыщения, резонансная частота падает, как показано на ФИГ. 29-31A-C. Можно применять отдельные множества условий для каждой из ненасыщенной области и области насыщения. Первый предел наклона частоты может применяться в ненасыщенной области, когда условия резонансной частоты выше предопределенного предела частоты, а второй, менее отрицательный, предел наклона частоты может применяться в области насыщения, когда условия резонансной частоты ниже того же предопределенного предела частоты.
Волновая форма изменения взвешенного наклона частоты (кГц/с) в зависимости от времени может подходить для одной формы генератора. Когда аппарат используется в неправильных условиях работы в направлении подушки, волновая форма наклона характеристической частоты в ненасыщенной области становится менее отрицательной, чем в области насыщения благодаря смягчению материала и соответствующему сокращению коэффициента трения подушки. Ненасыщенная область волновой формы наклона частоты соответствует условиям, когда тканевая подушка еще не начала значительно нагреваться. В области насыщения волновой формы наклона частоты подушка начинает смягчаться, и граница между лезвием и подушкой становится более смоченной, что вызывает повышение волновой формы наклона частоты (скорость нагрева падает). Могут потребоваться отдельные множества условий для каждой из ненасыщенной области и области насыщения. Первый предел наклона частоты может применяться в ненасыщенной области, когда условия резонансной частоты выше предопределенного предела наклона частоты, а второй, менее отрицательный, предел наклона частоты может применяться в области насыщения, когда условия резонансной частоты ниже того же предопределенного предела наклона частоты.
Теперь рассмотрим другой возможный случай. В ТАБЛИЦЕ 7 перечислены параметры для ультразвукового хирургического аппарата, применяемые при использовании двух множеств условий для учета ослабления сигнальных уровней наклона частоты из-за насыщения системы и падения силы тока.
Репрезентативные параметры для запуска звуковой индикации с помощью пределов наклона частоты и частоты, учитывающие ослабление наклона частоты из-за насыщения системы
(применяется два множества условий)
уровень 4: -0,053 кГц/с
уровень 3: -0,045 кГц/с
уровень 2: -0,038 кГц/с
уровень 1: -0,030 кГц/с
уровень 4: -0,038 кГц/с
уровень 3: -0,030 кГц/с
уровень 2: -0,024 кГц/с
уровень 1: -0,020 кГц/с
Данные, сгенерированные для этого возможного прогона, были сгенерированы с использованием ультразвукового хирургического аппарата, выполняющего десять последовательных разрезов на ткани тонкого кишечника с максимальной возможной скоростью. Используя значения параметров из ТАБЛИЦЫ 7, построены графики зависимости частоты от времени для возможного случая использования примера, которые показаны на ФИГ. 35-36.
На ФИГ. 35 дано графическое представление 1800 волновой формы частоты в зависимости от времени 1802 для одной формы генератора при выполнении десяти разрезов ткани (например, ткани тонкого кишечника) и графическое представление 1804 волновой формы изменения температуры в зависимости от времени 1805. На графическом изображении 1800 частота (Гц) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси. На графическом изображении 1804 температура (°F) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
На ФИГ. 36 приведено графическое представление 1805 волновой формы изменения частоты в зависимости от времени 1802, показанной на ФИГ. 35, для одной формы генератора при выполнении десяти разрезов ткани (например, ткани тонкого кишечника) при активации промежуточной ткани на участках, отмеченных номером позиции 1806. Частота (Гц) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
Волновая форма частоты 1802, показанная на ФИГ. 35 и 36, представлена для возможного случая использования двух множеств условий для учета ослабления наклона частоты из-за насыщения электрической системы (уменьшения смещения). Следует отметить, что речь идет о таком же тестовом прогоне, который показан на ФИГ. 29-31A-C. На ФИГ. 36 выделенные участки 1806 обозначают активацию с промежуточной тканью (частота падает, форма кривой локальной частоты обусловлена обезвоживанием ткани - пологое начало наклона становится более крутым по мере обезвоживания ткани), выделенные участки 1808 обозначают активацию с минимальным количеством промежуточной ткани или активацию при отсутствии промежуточной ткани (локальный наклон частоты очень крутой, форма кривой более линейная, постепенно становится круче), часть кривой 1810, в которой нет выделенных участков, обозначает время, когда устройство изменяет положение для выполнения следующего разреза, лезвие на воздухе остывает и быстро остывает при размещении на ткани (частота возрастает).
На ФИГ. 37 дано графическое представление 1812 волновой формы изменения наклона частоты в зависимости от времени 1814 для одной формы генератора при выполнении десяти разрезов ткани тонкого кишечника. Наклон частоты (кГц/с) представлен вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси. Участок B волновой формы наклона частоты 1814 изображает область прогона, за который выполнятся десять разрезов, когда множество условий 2 запускается до множества условий 1 впервые за такой прогон (частота менее 55,1 кГц и наклон частоты менее -0,045 кГц/с). Состояние, показанное на участке B, где множество условий 2 запускается до множества условий 1, является желательным, поскольку ультразвуковая система стабильно насыщается, доходя до этой точки прогона (напряжение насыщается, а сила тока ослабляется, в результате чего уменьшается смещение, а следовательно, и скорость нагрева требует увеличения предела наклона частоты).
На ФИГ. 38 дано графическое представление 1816 волновой формы изменения мощности в зависимости от времени 1818, которая представляет собой мощность, потребляемую одной формой генератора при выполнении десяти разрезов ткани (например, ткани тонкого кишечника). Мощность (Вт) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
На ФИГ. 39 дано графическое представление 1820 волновой формы изменения силы тока в зависимости от времени 1822 для одной формы генератора при выполнении десяти разрезов ткани тонкого кишечника. Сила тока (мА) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
После описания основного применения тканевого алгоритма, раскрытого в связи с логическими блок-схемами 1200, 1300, 1400, показанными на ФИГ. 20-22 в рамках мониторинга наклона частоты, резонансной частоты или обоих из перечисленных параметров относительно их соответствующих пределов, настоящее раскрытие обращается к описанию логических схем с фиксацией состояния и соответствующим их использованием в связи с тканевым алгоритмом. Причинами для включения логических схем с фиксацией состояния в тканевый алгоритм является: (a) предотвращение возврата множества условий в точку рестарта (множество условий изменяет значение с «истина» на «ложь») из-за того, что граница между лезвием и подушкой становится более смоченной во время действия неправильных условий работы лезвия на подушке; и (b) предотвращение возврата множества условий в точку рестарта (множество условий изменяет значение с «истина» на с) из-за импульсной активации, при которой периоды быстрого нагрева сменяются периодами менее быстрого нагрева (участки притока тепла к лезвию и участки оттока тепла от лезвия сменяют друг друга). Первая и вторая из этих причин проиллюстрированы на ФИГ. 48 и 49, соответственно. Как было определено выше в этом раскрытии, двумя защелкивающими параметрами, которые устраняют эти проблемы, являются «предел перекрестно-обратного наклона частоты», показанной на ФИГ. 40, и «минимальное время защелкивания». Для полноты раскрытия на ФИГ. 43 показаны расчетные кривые наклона частоты для одного импульсного прогона, показанного на ФИГ. 41 и 42A-C.
На ФИГ. 40 приведено графическое представление 1900 параметра «предел перекрестно-обратного наклона частоты» в связи с волновой формой изменения наклона частоты в зависимости от времени 1902. На ФИГ. 40 «предел наклона частоты» 1904 показан горизонтальной пунктирной линией на отметке -0,15 кГц/с. «Предел перекрестно-обратного наклона частоты» 1906 показан горизонтальной штрихпунктирной линией на отметке -0,02 кГц/с. В этом примере, множество условий выполняется, а множество ответных действий запускается, когда локальный расчетный наклон частоты пересекает «предел наклона частоты», как показано стрелкой 1908, направленной вниз. Множество условий не выполняется (множество ответных действий более не активируется), когда локальный расчетный наклон частоты пересекает «предел перекрестно-обратного наклона частоты», как показано стрелкой 1910, направленной вверх. Следует отметить, что без использования «перекрестно-обратного превышающего предела наклона частоты» в этом случае, множество ответных действий не было бы запущено, когда локальный наклон частоты пересек бы горизонтальную пунктирную линию 1904 в возвышающемся направлении приблизительно в точке 4,7 секунд, обозначенной точкой пересечения 1911.
На ФИГ. 41 дано комбинированное графическое представление 1920 импульсного применения одной формы ультразвукового хирургического аппарата на иссеченной сонной артерии, изображающее данные нормализованной мощности, тока, энергии и частоты на графике зависимости от времени.
На ФИГ. 42A приведено графическое представление 1921 волновой формы изменения полного сопротивления в зависимости от времени 1922 и волновой формы изменения силы тока в зависимости от времени 1924 для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени. Полное сопротивление (Ом) и ток (мА) представлены вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
На ФИГ. 42B дано графическое представление 1923 волновой формы изменения частоты в зависимости от времени 1925 для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени. Частота (кГц) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
На ФИГ. 42C приведено графическое представление 1930 волновой формы мощности 1926, волновой формы энергии 1927, волновой формы первой температуры 1928 и волновой формы второй температуры 1929 в виде графика зависимости от времени для одной формы генератора во время выполнения последовательных разрезов ткани в течение некоторого промежутка времени. Мощность (Вт), энергия (Дж) и температура (°C) представлены вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
На ФИГ. 42A-C показано импульсное применение ультразвукового хирургического аппарата на иссеченной ткани сонной артерии, при котором время первого импульса составляет 1 секунду, амплитуда первого импульса составляет 100% выходного тока для уровня мощности 3. Время второго импульса составляет 1,5 секунды, а амплитуда второго импульса составляет менее 10% выходного тока для уровня мощности 3. Примечательно, что волновая форма резонансной частоты 1925 показывает как участки нагрева (приток тепла к лезвию), так и участки охлаждения (отток тепла от лезвия). Параметр «минимальное время защелкивания», определяемый в настоящем документе как минимальное количеств зависимости от времени для запуска ответного(-ых) действия(-ий) в ответ на множество условий X, предназначен для поддержания срабатывания множества ответных действий во время импульсного применения (одним примером времени фиксации состояния может быть приблизительно 1 секунда). Дополнительно следует отметить, что, как показано на ФИГ. 42A, волновая форма нагрузки или полного сопротивления 1922 не опускается ниже 200 Ом на протяжении всей последовательности прогона. Это может являться преимуществом если учесть то, что волновая форма полного сопротивления 1922 для маршевого применения стабильно падает ниже приблизительно 150 Ом во время эксплуатации в воздушной среде между разрезами, что подразумевает, что предел полного сопротивления может быть использован для возврата множеств условий в точку рестарта. В одном аспекте такой предел полного сопротивления может быть использован для реализации концепции «медленного привода в воздухе», как описано в патенте США №. 5,026,387, автор Томас.
На ФИГ. 43 дано графическое представление 1932 рассчитанной волновой формы наклона частоты 1934 для импульсного применения, показанного на ФИГ. 41 и ФИГ. 42A-C в широком смысле. На ФИГ. 44 дано графическое представление крупным планом рассчитанной волновой формы наклона частоты 1934 для импульсного применения, показанного на ФИГ. 43. И на ФИГ. 43, и на ФИГ. 44 показана рассчитанная волновая форма наклона частоты 1934 для импульсного применения, показанного на ФИГ. 41 и ФИГ. 42A-C. Наклон частоты (кГц/с) представлен вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси. Показаны две шкалы, причем на ФИГ. 43 представлена грубая шкала для наклона частоты, а на ФИГ. 44 показан вид крупным планом. Для наклона частоты одни и те же тенденции, наблюдаемые при непрерывном приведении в действие, показаны для импульсного приведения в действие, использующего значения, которые хорошо соотносятся с притоком тепла к лезвию (отрицательный наклон частоты) и оттоком тепла от лезвия (положительный наклон частоты). Переходная природа кривой частоты и кривой наклона частоты вследствие пульсации, в сочетании с расчетом наклона частоты по методу «скользящего среднего», используют кривую наклона частоты во время затруднений пульсации. Примечательно, что ткань отделяется на 13-ой секунде. Как видно из ФИГ. 43 и особенно из ФИГ. 44, скорость охлаждения может быть использования для запуска ответных действий, связанных с быстрым охлаждением на участках остановка импульсных выходных сигналов, до завершения рассечения ткани с применением логических схем (не показано логическими потоками на ФИГ. 20-22), когда волновая форма наклона частоты 1934 превышает значение предела, который в данном случае составляет приблизительно 0,04 кГц/с при дискретизации на концах (т.е., в установившихся областях) периодов останова. Как показано на ФИГ. 42A, волновая форма полного сопротивления 1922 может быть использована для запуска ответных действий, связанных с высоким полным сопротивлением (высоким сопротивлением механическому движению или вибрации), до завершения рассечения ткани с применением логических схем (снова не показано логическими потоками на ФИГ. 20-22), когда волновая форма полного сопротивления преобразователя 1922 превышает значение предела, который в данном случае составляет приблизительно 700 Ом при дискретизации на концах (т.е., в установившихся областях) периодов останова.
На ФИГ. 45 дано графическое представление 1936 волновых форм других интересующих данных 1938, таких как полное сопротивление, мощность, энергия и температура. На ФИГ. 45 вертикальная шкала справа относится только к кривой полного сопротивления.
Далее в настоящем раскрытии речь пойдет об уровне мощности и профиле и давлении зажима ультразвукового хирургического аппарата. Скорость нагрева границы взаимодействия лезвия и подушки пропорциональна смещению лезвия, коэффициенту трения на границе взаимодействия и нагрузке (давлению зажимания или нормальной силе). Для оценки тканевого алгоритма в диапазоне смещений (уровней мощности) и при использовании с характерными для конкретных устройств комбинациями давления зажимания и коэффициента трения (который в основном определяется материалами подушки и покрытия лезвия) были проведены испытания.
На ФИГ. 46 дано графическое представление 1940 изменения суммарного наклона взвешенной частоты в зависимости от уровня мощности для различных типов ультразвуковых хирургических аппаратов. Взвешенный наклон частоты (кГц/с) представлен вдоль вертикальной оси, а уровень мощности, тип устройства и устройство представлены вдоль горизонтальной оси. Аппараты, используемые для генерации данных, собранных в графическом представлении 1940, как правило, с некоторыми исключениями, доступны в продаже. В одно из испытаний входило зажимание устройства, активация устройства на три секунды и расчет среднего наклона частоты для этих трех секунд. Однако, могут применяться и другие системы показателей. Для большинства устройств данные, собранные на ФИГ. 46, будут указывать на приблизительно минимальное значение наклона частоты. На ФИГ. 46 показаны обобщенные данные для наклона частоты в режиме приработки щипцеподобных ультразвуковых хирургических аппаратов, во время которого аппарат был сжат, активирован на три секунды и разжат. Средний наклон частоты за все три секунды был рассчитан и изображен графически, как показано на фигуре.
Исходя из предопределенных испытаний и данных испытаний, показанных на ФИГ. 46, следующие пределы наклона частоты предложены для основных уровней мощности, применяемых с некоторыми ультразвуковыми хирургическими аппаратами:
(1) предел наклона частоты для уровня 5: -0,060 кГц/с;
(2) предел наклона частоты для уровня 3: -0,045 кГц/с;
(3) предел наклона частоты для уровня 5: -0,070 кГц/с; и
(4) предел наклона частоты для уровня 3: -0,050 кГц/с.
Жесткость системы состоит и из жесткости лезвия (консольной балки), и из жесткости/температурной устойчивости подушки. Чем больше отличается жесткость ненагруженной системы (без ткани) от жесткости нагруженной системы (с зажатой тканью), тем более надежной является работа тканевого алгоритма. Конечно же, жесткость системы может быть в высокой степени ограничена и другими ограничениями.
Дальнейшее исследование воздействия смещения было выполнено на основе анализа большого количества данных. Для ультразвуковой системы уровни мощности по большому счету отличаются целевыми значениями выходного тока и силой тока, пропорциональной амплитуде вибрации или смещению. Анализ этих данных может также содержать цифровое сглаживание данных частоты для получения применимых кривых наклона частоты.
На ФИГ. 47-49 показаны волновые формы изменения частоты и силы тока в зависимости от времени, полученные с использованием одной формы генератора и ультразвукового хирургического аппарата для иссечения сонной артерии свиньи на уровне мощности 5.
На ФИГ. 47 приведено графическое представление 1970 волновой формы изменения резонансной частоты в зависимости от времени 1972, волновой формы изменения усредненной резонансной частоты в зависимости от времени 1974 и волновой формы изменения наклона частоты в зависимости от времени 1976 для одной формы генератора. Частота (кГц) и наклон частоты (кГц/с) показаны вдоль вертикальных осей, а время (с) представлено вдоль горизонтальной оси. Волновая форма наклона частоты 1976 основывается на данных усредненной частоты и была получена путем последующей обработки данных волновой формы частоты 1972. Исходные данные частоты, а также сглаженные (способом простого скользящего среднего) данные частоты и сглаженные данные наклона частоты (рассчитанные из сглаженных данных, поскольку исходные данные частоты содержат ступенчатое изменение в результате округления транслируемых данных) изображены на графике. Волновая форма усредненной резонансной частоты 1974 получена с помощью 70-миллисекундного скользящего среднего (кГц) данных резонансной частоты.
На ФИГ. 48 представлен вид крупным планом 1978 волновой формы изменения резонансной частоты в зависимости от времени 1972 и волновая форма изменения усредненной резонансной частоты в зависимости от времени 1974 для одной формы генератора. Частота (кГц) представлена вдоль вертикальной оси, а время (с) представлено вдоль горизонтальной оси.
На ФИГ. 49 представлен вид крупным планом 1980 волновой формы изменения резонансной частоты 1972 и силы тока 1982 в зависимости от времени для одной формы генератора. Частота (Гц) и сила тока (A) показаны вдоль вертикальных осей.
На ФИГ. 48 и 49 соответствующие виды крупным планом 1978, 1980 представлены для того, чтобы показать влияние сглаживания данных частоты и информацию о росте в начале применения, которая может оказаться полезной для оценки параметров, таких как Время ожидания.
Другие аспекты тканевого алгоритма, описанные в этом документе, могут применяться для ситуаций, когда между ультразвуковым лезвием и прихватом остается малое количество ткани или ткань между ними отсутствует, и когда избыточная энергия сбрасывается на концевой зажим. Таким образом, в одной форме тканевый алгоритм может быть изменен для того, чтобы предоставлять обратную связь пользователю в такой ситуации. Например, тканевый алгоритм по максимум использует тот факт, что резонанс ультразвукового лезвия изменяется в зависимости от температуры (уменьшается, когда температура повышается, и увеличивается, когда температура падает).
В одном аспекте тканевый алгоритм, описанный в этом документе, может использоваться для выполнения мониторинга наклона частоты волновой формы, для которой алгоритм выполняет мониторинг изменения наклона резонансной частоты, чтобы подавать сигнал об изменении состояния ткани. В случае, показанном на ФИГ. 50, например, перегиб кривой ответной частоты соответствует точке, в которой ткань начинает отделяться (т.е., существует тканевая метка, и пользователь продолжает активировать аппарат), что может быть проверено в ходе эксперимента. Изменение наклона частоты может быть использовано для предоставления визуальной, звуковой и/или тактильной обратной связи (например, кроме описанных ранее, отчетливый звуковой сигнал, мигающий свет, вибрация, ощущаемая тактильно) пользователю о том, что избыточная энергия сбрасывается на концевой зажим, или что выходная мощность генератора может быть откорректирована, или подача ее может быть прекращена.
В другом аспекте тканевый алгоритм, описанный в этом документе, может применяться для мониторинга предела частоты волновой формы, для которой алгоритм выполняет мониторинг изменения частоты, поскольку волновая форма пересекает некоторый предел или разность от некоторого известного состояния (например, комнатной температуры). Аналогично мониторингу наклона частоты, когда изменение частоты падает ниже некоторого ого значения или разности, пользователю может быть подан сигнал о том, что концевой зажим устройства нагревается с увеличенной скоростью. На ФИГ. 50 снова представлен графический иллюстративный вид предела частоты.
В еще одном аспекте тканевый алгоритм, описанный в этом документе, может быть применен для мониторинга комбинации изменения наклона частоты и предела частоты. Комбинация значительного изменения наклона частоты и падения частоты ниже некоторого предела может быть использована для предоставления индикации повышения температуры.
На ФИГ. 50 приведено графическое представление 1990 волновых форм нормализованной комбинированной мощности 1991, полного сопротивления 1992, силы тока 1993, энергии 1994, частоты 1995 и температуры 1996 для одной формы генератора, сочлененного с ультразвуковым хирургическим аппаратом. Как показано, ткань начинает отделяться в точке 6,672 секунд. Начиная с этого момента и до полного отделения ткани, достигается приблизительно 55-60% общего падения частоты, температура повышается приблизительно в 1,92 раза (с 219°C до 418°C) и передается приблизительно 28% всей использованной энергии. Волновые формы изменения локальных наклонов частоты в зависимости от времени показаны первым множеством пунктирных линий 1997, которое представляет быстрое изменение наклона резонансной частоты. Мониторинг этого наклона 1997 предоставляет возможность обозначить резкое изменение, которое обычно происходит, когда в концевом зажиме отсутствует ткань или присутствует ограниченное количество ткани, и большая часть мощности передается на границу лезвия и тканевой подушки. Аналогично, изменение частоты из состояния резонанса в известное состояние (например, комнатная температура) может быть использовано для индикации высоких температур - предел изменения частоты показан второй пунктирной линией 1998. К тому же, комбинация этих двух параметров (изменение наклона частоты и предел изменения частоты) могут отслеживаться в целях индикации. Следует отметить, что в этом случае имеет место изменения частоты из исходного значения 55 712 Гц в конечное значение 55 168 Гц, при этом предел показан приблизительно в точке 55 400 Гц.
В некоторых возможных формах операционные условия и/или условия, обусловленные используемым аппаратом, могут сократить способность множеств условий, описанных выше, точно отражать состояние аппарата. В некоторых ситуациях, лезвие может нагреваться медленнее, чем обычно, в результате чего резонансная частота будет выше, а наклон частоты будет более плавным, чем предполагалось. Один из примером такой ситуации может иметь место, когда ткань прилипает к поверхности лезвия, которая не должна участвовать в зажимании. В такой и других ситуациях наблюдается более постепенная скорость нагрева, даже при завершении прижимания ткани, когда между лезвием и подушкой прихвата не остается ткани или остается малое количество ткани. Это, в свою очередь, может отсрочить выполнение различных множеств условий, основанных на сравнении локального наклона частоты с пороговым параметром наклона частоты и/или на сравнении локальной резонансной частоты с пороговым параметром частоты. В результате, множества ответных действий, реализующие подачу звуковых сигналов, переход в импульсные режимы, деактивацию тока и т.д., могут быть неоправданно отсрочены.
На ФИГ. 51A и 51B даны графические представления резонансной частоты и наклона частоты, соответственно, отображенные одной формой ультразвукового хирургического аппарата во время «зажимания» ткани ультразвуком. «Зажимание», показанное на ФИГ. 51A и 51B, привело к постепенному нагреву лезвия ультразвукового хирургического аппарата. На ФИГ. 51A представлен график, на котором время показано вдоль горизонтальной оси 2100, а резонансная частота лезвия - вдоль вертикальной оси 2104. На графике 2105 показано изменение резонансной частоты лезвия в зависимости от времени. На ФИГ. 51B представлен график, на котором время показано вдоль горизонтальной оси 2104, а наклон частоты - вдоль вертикальной оси 2106. На графике 2107 показано изменение наклона частоты в зависимости от времени. Во время возможного разреза, показанного на ФИГ. 51A и 51B, отделение ткани произошло между второй и третьей секундой. Отделение ткани вызвало небольшое изменение резонансной частоты, обозначенное в точке 2108, и пологий минимум наклона частоты, обозначенный в точке 2100. Свойства сигнала 2108, 2110, однако, могут оказаться недостаточными для своевременного запуска множества условий, которое требует, чтобы наклон частоты опустился ниже параметра наклона частоты, и/или чтобы резонансная частота опустилась ниже ого параметра частоты.
На ФИГ. 52A и 52B даны графические представления резонансной частоты и наклона частоты, соответственно, отображенные одной формой ультразвукового хирургического аппарата во время другого разреза ткани ультразвуком. Напомним, что оказанное «зажимание» ткани привело к постепенному нагреву лезвия ультразвукового хирургического аппарата. На графике 2112 показано изменение резонансной частоты в зависимости от времени для «зажимания» ткани, показанного на ФИГ. 52A-52B, в то время как на графике 2114 показано изменение наклона частоты в зависимости от времени для «зажимания» ткани, показанного на ФИГ. 52A-52B. В проиллюстрированном «зажимании ткани» ткань начала отделяться от лезвия между пятой и седьмой секундой, и кончик ткани полностью отделился от лезвия приблизительно через девять секунд. Видно, что отделение ткани вызвало изменение резонансной частоты, которое началось в точке 2116, и образовало небольшой минимум наклона частоты, обозначенный точкой 2118. Напомним, что, несмотря на это, вследствие медленного нагрева лезвия, свойства сигнала 2116, 2118 могут оказаться недостаточными для запуска желаемого множества условий.
В определенных формах генераторы, такие как генераторы 30, 500, 1002, и/или ультразвуковые хирургические аппараты, например, ультразвуковые хирургические аппараты 100, 120, 1004, могут быть реализованы с одним или более множествами условий, которые учитывают динамическую отсечку частоты. Эти и другие множества условий, описанные в этом документе, могут быть активированы врачом после получения входного сигнала от переключателя, кнопки, педали или, в некоторых формах работать в фоновом режиме во время выполнения других алгоритмов (например, алгоритмов управления аппаратом). Например, базовая резонансная частота может быть захвачена, когда ультразвуковое полное сопротивление превышает пороговое полное сопротивление. Например, превышение порогового полного сопротивления может обозначать, что прихват закрыт (например, в ближайшее время должно начаться «зажимание» ткани). Одно или более множеств условий может содержать условие отсечки базовой частоты, которое выполняется, когда резонансная частота лезвия отличается от базовой частоты на величину, большую, чем пороговый параметр базового отклонения. В определенных формах условие отсечки базовой частоты выполняется даже тогда, когда другие условия, зависящие от резонансной частоты или наклона частоты не выполнятся. При использовании в структуре логического ИЛИ с другими условиями условия отсечки базовой частоты могут предоставить возможность срабатывания определенных пар условий и ответных действий в таких ситуациях, которые были описаны ранее, когда нагрев лезвия является более постепенным, чем обычно.
На ФИГ. 53 представлена логическая блок-схема одной формы тканевого алгоритма 2120, реализующего исходное условие отсечки частоты, которое может быть реализовано в одной форме генератора для анализа исходной резонансной частоты ультразвукового лезвия. На этапе 2122 начинается активация лезвия. Например, генератор может быть активирован на конкретном уроне мощности, обозначенном «N.» Дополнительно, на этапе 2124 генератор может ждать в течение порогового периода времени. Порогового периода времени может быть достаточно для рассеивания любой частоты или других переходных процессов, которые происходят при активации. Например, на ФИГ. 54A и 54B даны графические представления частоты лезвия, продемонстрированные в различных примерных активациях ультразвукового оборудования. На графике 2136 показано изменение частоты в зависимости от времени для первого примера активации, на котором виден элемент переходной частоты или выброс сигнала на этапе 2140. На графике 2138 показано изменение частоты в зависимости от времени для второго примера активации, на котором виден элемент переходной частоты или выброс сигнала на этапе 2142.
Возвращаясь к этапу 2124, отметим, что алгоритм 2120 может использовать любой подходящий пороговый период времени, который выходит за пределы рассеяния всех или большинства переходных процессов или выбросов сигнала. Например, в некоторых формах пороговый период времени может составлять от 0,1 до 1,0 секунды. В некоторых возможных формах пороговый период времени может составлять от 0,2 до 0,5 секунд. В одной возможной форме, пороговый период времени может составлять приблизительно 0,2 секунды. На этапе 2126 может получить индикацию ультразвукового полного сопротивления. В различных возможных формах ультразвуковое полное сопротивление представляет собой электрическое полное сопротивление системы преобразователя и лезвия и/или полное сопротивление «в механической ветви», как описано в этом документе ранее. На этапе 2128 генератор может определить, больше ли ультразвуковое полное сопротивление, чем полное сопротивление. Например, это может быть представлено закрыванием прихвата либо в направлении лезвия, либо в направлении ткани. В некоторых формах генератор на этапе 2128 может не прийти к выводу, что ультразвуковое полное сопротивление больше предела, если ультразвуковое полное сопротивление не будет превышать предел на протяжении заданного промежутка времени («время превышения полного сопротивления»). Время превышения полного сопротивления может принимать любое подходящее значение между 10 и 100 мс, в том числе, например, 30 мс.
Если ультразвуковое полное сопротивление не больше порогового полного сопротивления на этапе 2128 (или не выше, чем пороговое полное сопротивление в течение «времени превышения полного сопротивления»), генератор может вернуться на этап 2126 и 2128, продолжая отслеживать ультразвуковое полное сопротивление до тех пор, пока оно не превысит пороговое полное сопротивление. Если ультразвуковое полное сопротивление выше, чем пороговое полное сопротивление на этапе 2128, генератор может захватить локальную резонансную частоту лезвия в качестве базовой частоты на этапе 2130. По мере продолжения активации генератор может на этапе 2132 определить превышает ли дельта частоты, или разность между фазовой частотой и локальной резонансной частотой лезвия, пороговый параметр базового отклонения. Если дельта частоты превышает пороговый параметр базового отклонения, то базовое условие отсечки может быть выполнено. Если соблюдение базового условия отсечки вызывает выполнение всего множества условий, то соответствующее множество ответных действий может быть запущено на этапе 2134. В некоторых формах базовое условие отсечки не выполняется до тех пор, пока или если дельта частоты не будет превышать величину порогового параметра базового отклонения в течение времени превышения дельта частоты.
Некоторые возможные формы, использующие базовую частоту и дельта частоты, как описано в отношении алгоритма 2120, также решают проблемы, возникающие во время операций, когда резонансная частота ультразвукового лезвия изменяется между активациями или разрезами. Это может произойти, например, когда ультразвуковое лезвие используется для выполнения множественных разрезов без его реактивации межу разрезами. На ФИГ. 55 дано графическое представление изменения резонансной частоты 2144 и ультразвукового полного сопротивления 2150 в зависимости от времени для одной формы, включая множественные разрезы, выполняемые с помощью ультразвукового лезвия. Каждый элемент 2147 представляет собой «зажимание», разрез или другой вид обработки ткани с применением ультразвукового лезвия. На ФИГ. 55 показано, что в начале каждого разреза резонансная частота подскакивает (например, по мере того, как прихват закрывается в направлении ткани). Например, по мере того, как прихват закрывается в направлении ткани, лезвие может быть приведено в контакт с относительно прохладной тканью. Такой контакт может охлаждать лезвие, что вызывает временный положительный наклон резонансной частоты, как показано на ФИГ. По мере того как ультразвуковая энергия передается на лезвие, оно начинает нагреваться, вызывая показанное снижение резонансной частоты для каждого разреза. Как показано на ФИГ. 55, связанном с алгоритмом 2120, ультразвуковое полное сопротивление может превышать гармоническое пороговое полное сопротивление в начале каждого разреза 2147, в результате чего генератор охватывает базовую частоту в этот момент времени. Например, линия 2148 обозначает примерную точку в зависимости от времени, когда ультразвуковое полное сопротивление превысило пороговое полное сопротивление, и была измерена величина базовой частоты.
В определенных формах условие отсечки базовой частоты может использоваться в общем множестве условий с одним или более других условий. На ФИГ. 56 представлена логическая блок-схема тканевого алгоритма 2150, который может быть реализован в одной форме генератора и/или аппарата для реализации исходного состояния отсечки частоты в сочетании с другими условиями. На этапе 2152 генератор может рассчитать дельта частоты. Дельта частоты может быть рассчитано, как описано выше, например, в отношении алгоритма 2120. Например, генератор может считывать базовую частоту, когда ультразвуковое полное сопротивление превышает пороговое полное сопротивление, и находить дельта частоты как разность между локальной резонансной частотой и базовой частотой. На этапе 2154 генератор может применять одно или более других условий. Такие условия могут быть аналогичными условиям, описанным выше в отношении ФИГ. 20-22. Например, другие условия могут содержать следующие условия: меньше ли локальный наклон частоты, чем пороговый параметр наклона частоты 1404, меньше ли локальная резонансная частота, чем пороговый параметр частоты и т.д. Другие условия могут быть применены в любом логическом порядке. Например, другие условия могут считаться выполненными, если одно из других условий выполнено (например, логическое ИЛИ), и могут считаться выполненными только, если все из других условий выполнены (например, логическое И) и т.д.
Если другие условия выполнены на этапе 2154, множество условий может считаться выполненным, и генератор может запустить подходящее множество ответных действий на этапе 2158. Если другие условия не выполнены на этапе 2154, генератор может определить, больше ли дельта частоты, чем пороговый параметр базового отклонения на этапе 2156. Если нет, то эти другие условия могут быть применены снова на этапе 2154. Если да, то множество условий может считаться выполненным даже несмотря на то, что другие условия не выполнены. После срабатывания множества ответных действий на этапе 2128 множество ответных действий может продолжать выполняться до тех пор, пока на этапе 2160 не будет определено, что выполняются параметры выхода из множества ответных действий, после чего будет выполнен выход из запущенного состояния на этапе 2162. Такие параметры могут содержать, например, истечение минимального времени защелкивания для множества условий, превышение наклоном частоты предела перекрестно-обратного наклона частоты и т.д.
В различных возможных формах условие отсечки базовой частоты может быть применено в контексте логических блок-схем 1200, 1300, 1400, показанных на ФИГ. 20-22, описанных выше. Например, на ФИГ. 57 представлена логическая блок-схема части 1300' тканевого алгоритма 1200 оценки сигнала, которая является частью тканевого алгоритма 1200, показанного на ФИГ. 20, анализирующая исходное условие отсечки частоты. Алгоритм 1300' может выполняться в порядке, аналогичном порядку выполнения алгоритма 1300, описанного в этом документе ранее. На этапе 2164, однако, генератор может определить, установлен ли флажок мониторинга нагрузки для данного множество условий X. В некоторых возможных формах флажок мониторинга нагрузки 2167 может подавать сигнал о том, следует ли учитывать условие отсечки частоты.
Если флажок мониторинга нагрузки 2167 не установлен, дельта частоты может быть установлено на ноль (например, нулевая дельта частоты никогда не превышает предел базового отклонения, что позволяет алгоритму 1300' работать в порядке, аналогичном порядку работы алгоритма 1300). Если флажок мониторинга нагрузки 2167 установлен, генератор может выполнить алгоритм мониторинга нагрузки 2166, который в качестве входных данных может получить флажок сохранения статуса 2168. Флажок сохранения статуса может подать сигнал генератору о том, нужно ли ждать пороговый период времени до того, как учесть ультразвуковое полное сопротивление, чтобы предупредить появление элементов переходных процессов или выбросов сигнала, как показано по отношению к ФИГ. 54A, 54B.
Алгоритм мониторинга нагрузки 2166 может возвращать значение дельта частоты. Подробнее о том, как алгоритм мониторинга нагрузки возвращает дельта частоты, описано в этом документе далее в связи с ФИГ. 58. Возвращаясь к ФИГ. 57, на этапе 2172 генератор может вычислить наклон между двумя или более точками данных резонансной частоты и может применить подходящее усреднение и/или сглаживание, как описано в этом документе ранее. Входные данные для этапа 2172 могут содержать входящую точку данных резонансной частоты 2174 (Ft) и входящую точку данных ультразвукового полного сопротивления 2176 ( ), которые могут быть мгновенными и/или средними для нескольких точек данных. Таймер времени ожидания может быть применен на этапе 1306, как описано ранее. Если время ожидания истекло, генератор может выполнить один или более алгоритмов с множеством условий 1400/1400', как описано в этом документе. Каждый алгоритм с множеством условий 1400/1400' может получить в качестве аргументов ультразвуковое полное сопротивление, наклон частоты, резонансную частоту и дельту частоты.
), которые могут быть мгновенными и/или средними для нескольких точек данных. Таймер времени ожидания может быть применен на этапе 1306, как описано ранее. Если время ожидания истекло, генератор может выполнить один или более алгоритмов с множеством условий 1400/1400', как описано в этом документе. Каждый алгоритм с множеством условий 1400/1400' может получить в качестве аргументов ультразвуковое полное сопротивление, наклон частоты, резонансную частоту и дельту частоты.
На ФИГ. 58 представлена логическая блок-схема одной формы алгоритма мониторинга нагрузки 2166, который может быть реализован в одной форме генератора. Алгоритм мониторинга нагрузки 2166 может принять в качестве входных данных локальное ультразвуковое полное сопротивление (), локальную резонансную частоту (Ft) и состояние флажка сохранения статуса (FMaintain Status). На этапе 2178 генератор может определить, установлен ли флажок сохранения статуса. Если нет, то дельта частоты (Fдельта) может быть установлена на ноль на этапе 2210. В определенных формах установка дельты частоты на ноль может эффективно отключать мониторинг нагрузки. Если флажок сохранения статуса установлен, таймер сохранения 2180 на этапе 2180 может быть увеличен. На этапе 2182 генератор может определить, достиг ли таймер сохранения порогового периода времени для рассеяния выброса сигнала. Если нет, дельта частоты может быть установлена на ноль на этапе 2210. Если да, генератор может определить на этапе 2184, больше ли полученное локальное ультразвуковое полное сопротивление, чем пороговое полное сопротивление 2186. Если да, таймер нагрузки, используемый для отсчета времени превышения порогового полного сопротивления, описанного выше, может быть увеличен на этапе 2192.
На этапе 2190 генератор может определить, больше ли таймер нагрузки, чем время превышения порогового полного сопротивления 2188. Если да, генератор может определить, установлена ли защелка базовой частоты на этапе 2194. Защелка базовой частоты может предотвратить отскакивание базовой частоты во время события закрытия бранши, индикация которого выполняется ультразвуковым полным сопротивлением. Например, если защелка базовой частоты установлена, это может означать, что базовая частота для данного события нагружения уже была считана. Если защелка базовой частоты не установлена, генератор может установить защелку и установить базовую частоту на уровне текущей резонансной частоты системы на этапе 2196. На этапе 2206 генератор может снова определить, установлена ли защелка базовой частоты. Если да, дельта частоты может быть установлено на величину базовой частоты за вычетом локальной резонансной частоты на этапе 2208. Если базовая защелка не установлена, то дельта частоты может быть установлено на ноль на этапе 2210.
Возвращаясь к этапу 2184, нужно отметить, что если ультразвуковое полное сопротивление не больше порогового полного сопротивления, генератор может сбросить таймер нагрузки на этапе 2198. На этапе 2202, генератор может определить, меньше ли ультразвуковое полное сопротивление, чем сбрасываемое пороговое полное сопротивление  . Если ультразвуковое полное сопротивление меньше, чем сбрасываемое пороговое полное сопротивление, генератор может сбросить защелку базовой частоты на этапе 2204 и перейти к этапу 2206, как описано ранее. Если ультразвуковое полное сопротивление не меньше сбрасываемого порогового полного сопротивления, генератор может перейти к этапу 2206, как описано ранее, не сбрасывая защелку базовой частоты.
. Если ультразвуковое полное сопротивление меньше, чем сбрасываемое пороговое полное сопротивление, генератор может сбросить защелку базовой частоты на этапе 2204 и перейти к этапу 2206, как описано ранее. Если ультразвуковое полное сопротивление не меньше сбрасываемого порогового полного сопротивления, генератор может перейти к этапу 2206, как описано ранее, не сбрасывая защелку базовой частоты.
На ФИГ. 59 представлена логическая блок-схема1400' для оценки множеств условий для тканевого алгоритма оценки сигнала 1300', показанного на ФИГ. 57, который может быть реализован в одной форме генератора. На этапе 2212, генератор может реализовать логическую схему для определения, выполняется ли нефильтрованное множество условий для оцениваемого множества условий. Логическая схема 2212 описана более подробно ниже в связи с ФИГ. 60 и может возвращать ответ в виде «истина» или «ложь». На этапе 2214, генератор может определить, установлена ли защелка фильтрованного множества условий. Защелка фильтрованного множества условий может быть установлена, как описано далее, когда выполняется фильтрованное множество условий, например, чтобы гарантировать индикацию необходимости установки фильтрованного множества условий на протяжении порогового периода времени. Если установлена защелка фильтрованного множества условий, генератор может увеличить таймер защелки на этапе 2218 и определить, выполняется ли нефильтрованное множество условий на этапе 2220. Если нефильтрованное множество условий выполняется, тогда логический поток 1400' может вернуть индикацию того, что фильтрованное множество условий выполняется.
Если нефильтрованное множество условий не выполняется на этапе 2220, генератор может определить, выполняется ли все еще множество условий на этапе 2222. Например, генератор может определить, (i) превысил ли таймер защелки фильтрованного множества условий таймер минимального времени защелкивания 1422; и (ii) больше ли наклон частоты, чем предел перекрестно-обратного наклона частоты 1424; и (iii) [отключен мониторинг нагрузки 2167 ИЛИ завершилось событие нагружения] (например, меньше ли ультразвуковое полное сопротивление, чем предел сброса полного сопротивления 2228). Если эти условия выполняются, генератор может на этапе 2224 отпустить защелку фильтрованного множества условий; сбросить таймер дребезга контактов (например, ТАЙМЕР X на ФИГ. 22); сбросить таймер защелки; сбросить таймер нагрузки (например, время превышения полного сопротивления), сбросить защелку базовой частоты; и установить дельта частоты на ноль. Логический поток 1400' может возвращать индикацию того, что фильтрованное множество условий не выполняется.
Снова возвращаясь к этапу 2214, отметим, что если защелка фильтрованного множества условий не установлена, генератор может определить, выполняется ли нефильтрованное множество условий на этапе 2216 (например, основываясь на значении, которое возвращается на этапе 2212). Если нет, таймер дребезга контактов может быть сброшен на этапе 1410, а логический поток 1400' может возвратить индикацию того, что фильтрованное множество условий не выполняется. Если да, генератор может увеличить таймер дребезга контактов на этапе 1408. На этапе 1414 генератор может определить, больше ли таймер дребезга контактов, чем параметр требуемого параметра времени до срабатывания 1412, как описано ранее. Если да, алгоритм 1400' может продолжить выполнение сценария вдоль ветки ДА, фиксируя защелку фильтрованного множества условий на этапе 1416 и возвращая индикацию того, что фильтрованное множество условий выполняется.
На ФИГ. 60 представлена логическая блок-схема для реализации одной формы логического устройства множества нефильтрованных условий 2212, показанного на ФИГ. 59, которое может быть реализовано в одной форме генератора. На этапе 2232 генератор может определить, меньше ли локальный наклон частоты, чем пороговый параметр наклона частоты 1404. В некоторых формах пороговый параметр наклона частоты может зависеть от уровня мощности, подаваемого генератором, как описано ранее. Если локальный наклон частоты меньше, чем пороговый параметр наклона частоты 1404, генератор может, на этапе 2236, определить, меньше ли локальная резонансная частота, чем пороговый параметр частоты 1406. Если да, то алгоритм 2212 может возвратить индикацию того, что нефильтрованное множество условий выполняется. В некоторых формах условия 2232, 2236 могут быть реализованы в порядке логического ИЛИ вместо логического И, как было описано. Например, после того, как было определено, что локальный наклон частоты меньше, чем пороговый параметр наклона частоты 1404, алгоритм может возвращать индикацию того, что нефильтрованное множество условий выполняется. Аналогично, после того, как было определено, что локальный наклон частоты не меньше, чем пороговый параметр наклона частоты 1404, алгоритм может выполнить оценку резонансной частоты и порогового параметра частоты 1406 на этапе 2236.
Если условия, проанализированные на этапе 2232 и 2236, не выполняются (не зависимо от того, какая логическая структура была применена), генератор может определить, на этапе 2240, превышает ли разность между базовой частотой (например, установленной на этапе 2196) и локальной резонансной частотой (например, дельта частоты) пороговый параметр базового отклонения 2242. Если да, алгоритм 2212 может возвращать индикацию того, что нефильтрованное множество условий выполняется. Если нет, алгоритм 2212 может возвращать индикацию того, что нефильтрованное множество условий не выполняется.
В определенных формах генераторы, такие как генераторы 30, 500, 1002, и/или ультразвуковые хирургические аппараты, такие как ультразвуковые хирургические аппараты 100, 120, 1004, могут быть реализованы с одним или более множествами условий, которые применяют события нагружения для запуска триггеров множества ответных действий. Например, генератор может выявлять события нагружения, как описано в этом документе. Событие нагружения может иметь место, например, когда нагрузка на ультразвуковое лезвие претерпевает изменение (например, внезапное или стремительное изменение). Физическими условиями, которые могут вызвать изменение нагрузки, являются, например, открытие и/или закрытие прихвата, внезапное опускание ультразвукового лезвия через ткань и т.д. В различных формах при обнаружении события нагружения, триггеры множества ответных действий могут срабатывать или иметь возможность сработать при условии возникновения других условий в соответствующем множестве условий. Если событие нагружения не обнаружено, триггеры множества ответных действий могут быть отключены, или не иметь возможности быть запущенными даже при условии возникновения других условий в соответствующем множестве условий. Существование события нагружения может служить альтернативным индикатором типов физических условий, которые должны быть выявлены различными множествами условий (например, изменение состояния ткани, например, отделение, обезвоживание ткани и т.д.). Таким образом, вероятность того, что множества условий, применяющие триггеры события нагружения, возвратят ложноположительное срабатывание (например, в ситуации, когда множество условий выполняется, а физическое условие, послужившее для этого причиной, отсутствует), меньше. В результате, множества условий, применяющие события нагружения, могут также использовать более низкие или менее чувствительные пороги для пределов наклона частоты 1404, пределов частоты 1406 и т.д.
В соответствии с различными формами события нагружения могут быть выявлены путем изучения изменений наклона частоты в зависимости от времени. На ФИГ. 61 дано графическое представление наклона частоты 2302 и производной частоты второй степени 2304 для ультразвукового лезвия, иллюстрирующие пару событий нагружения. События нагружения явно видны на графике наклона частоты 2302 по элементам 2305 и 2306 и на графике второй производной 2304 по элементам 2307 и 2308. Лезвие, которое генерировало характеристики, показанные на ФИГ. 61, было активировано ненагруженным, в точке приблизительно ½ секунды, зажато в точке приблизительно 1½ секунды и разжато в точке приблизительно 3½ секунды, как показано на горизонтально оси. Зажимание и разжимание может соответствовать событиям нагружения, обозначенным позициями 2305, 2307 и 2306, 2308. Следует понимать, что на сам наклон частоты могут воздействовать как температурные события (например, изменения температуры лезвия), так и события нагружения. Это утверждение проиллюстрировано на ФИГ. 61, поскольку график наклона частоты 2302 содержит различные изменения в дополнение к элементам 2305, 2306. И наоборот, график производной второго порядка 2304 является приблизительно постоянным за исключением изменений, обозначенных элементами 2307, 2308.
В виду этого, определенные формы определяют наличие события нагружения путем изучения изменений наклона частоты по скользящему окну. Например, настоящий или локальный наклон частоты сравнивается со сдвигом предыдущего наклона частоты от локального наклона частоты с помощью окна сдвига времени. Непрерывные результаты сравнения могут называться скользящим дельта. Окно сдвига времени может представлять собой любой подходящий промежуток времени и, в определенных формах может составлять приблизительно 100 мс. Когда скользящее дельта превышает пороговый параметр наклона частоты, может быть выявлено событие нагружения. В определенных формах события нагружения, которые начинаются, когда лезвие не нагружено, могут не учитываться (например, триггеры множества ответных действий могут быть не запущены). Например, перед исследованием наклона частоты с помощью скользящего окна, генератор может сначала выявить увеличение ультразвукового полного сопротивления свыше предела полного сопротивления. (В некоторых формах предел полного сопротивления должен сохраняться на протяжении времени превышения предела полного сопротивления прежде, чем генератор выявит событие нагружения.) Предел полного сопротивления может представлять собой любое подходящее значение и в определенных формах составляет между приблизительно 5 Ом и приблизительно 260 Ом, с разрешением приблизительно 5 Ом. В одной возможной форме предел полного сопротивления составляет приблизительно 100 Ом. Рост ультразвукового полного сопротивления свыше предела может свидетельствовать о том, что прихват закрыт, а следовательно, событие нагружения становится более вероятным.
На ФИГ. 62 дано графическое представление наклона частоты 2310, производной частоты второй степени 2312 и дельты качения 2314, демонстрирующие событие нагружения. Элемент 2316 на графике дельты качения 2314 означает, что дельта качения превысила пороговый параметр наклона частоты, что свидетельствует о наличии события нагружения. На ФИГ. 63 дано графическое представление другой формы наклона частоты 2318, производной частоты второй степени 2320 и дельты качения 2322, демонстрирующие другое событие нагружения. Элемент 2324 на графике дельты качения 2322, элемент 2326 на графике производной второго порядка 2320 и элемент 2328 на графике наклона частоты 2328 свидетельствует о наличии события нагружения.
На ФИГ. 64 представлена логическая блок-схема для реализации одной формы алгоритма 2330, использующего множество условий, содержащего триггер события нагружения, который может быть использован в одной форме генератора. На этапе 2332 генератор может определить, имеет ли место событие нагружения. Дополнительные примеры определения генератором наличия события нагружения представлены в настоящем документе в связи с ФИГ. 65. Если событие нагружения не происходит, генератор может продолжить тестирование на предмет наличия события нагружения на этапе 2332. Если событие нагружения имеет место, генератор может «запустить» соответствующее множество ответных действий на этапе 2334. Запуск множества ответных действий может подразумевать возможность запуска множества ответных действий, когда выполняется соответствующее ему множество условий. На этапе 2336 генератор может определить, ниже ли локальное ультразвуковое полное сопротивление, чем параметр предела сбрасывания полного сопротивления. Параметр предела сбрасывания полного сопротивления может представлять собой уровень полного сопротивления, на котором генератор приходит к заключению о том, событие нагружения завершено. Если локальное ультразвуковое полное сопротивление ниже параметра предела сбрасывания полного сопротивления, генератор может отключить множество ответных действий на этапе 2342. Если локальное ультразвуковое полное сопротивление не ниже чем предел сбрасывания полного сопротивления, генератор (например, 30, 500, 1002) может определить, выполнятся ли параметры множества условий на этапе 2338. Если множество условий выполняется, генератор может запустить подходящее множество ответных действий на этапе 2340.
На ФИГ. 65 представлена логическая блок-схема для реализации одной формы алгоритма 2332 для определения существования условия нагружения в хирургическом аппарате. На этапе 2342, генератор может определить, превышает ли локальное ультразвуковое полное сопротивление системы ультразвукового лезвия/преобразователя предел полного сопротивления. Например, превышение предела ультразвуковым полным сопротивлением может свидетельствовать о закрытии прихвата. Если превышения нет, алгоритм 2332 может возвращать индикацию того, что событие нагружения на этапе 2334 отсутствует. Если локальное ультразвуковое полное сопротивление превышает предел полного сопротивления, генератор может определить на этапе 2346, больше ли дельта качения частоты, чем пороговый параметр наклона частоты. Если да, алгоритм 2332 может возвращать индикацию о наличии события нагружения 2348. Если нет, алгоритм 2344 может возвращать индикацию об отсутствии события нагружения.
В различных возможных формах, множества условий, применяющие события нагружения для запуска триггеров множества ответных действий, могут быть использованы в контексте логических блок-схем 1200, 1300, 1400, показанных на ФИГ. 20-22, описанных выше. Например, на ФИГ. 66 представлена логическая блок-схема одной формы части 1300'' тканевого алгоритма оценки сигнала 1200, которая является частью тканевого алгоритма 1200, показанного на ФИГ. 20, анализирующая множество условий, применяющее событие нагружения, чтобы запустить триггеры множества ответных действий. В различных формах тканевый алгоритм 1300'' оценки сигнала может работать в порядке, аналогичном порядку работы алгоритма 1300, описанного выше, с некоторыми отличиями. Например, в алгоритме 1300'' функция оценки/мониторинга сигнала 1308 может выполняться до сравнения времени ожидания на этапе 1306, хотя следует понимать, что порядок этих действий может быть любым для любых из алгоритмов 1300, 1300', 1300'' описанных в этом документе. К тому же, функция оценки/мониторинга сигнала 1308 может также захватывать локальное ультразвуковое полное сопротивление  и дельта качения (Fslope_дельта), которые могут быть переданы в различные алгоритмы оценки множества условий 1400, как описано в этом документе. Например, алгоритм 1300 может передать в качестве аргументов локальное ультразвуковое полное сопротивление, дельту качения, локальный наклон частоты (Fslope) и локальную резонансную частоту (Ft).
и дельта качения (Fslope_дельта), которые могут быть переданы в различные алгоритмы оценки множества условий 1400, как описано в этом документе. Например, алгоритм 1300 может передать в качестве аргументов локальное ультразвуковое полное сопротивление, дельту качения, локальный наклон частоты (Fslope) и локальную резонансную частоту (Ft).
На ФИГ. 67 представлена логическая блок-схема алгоритма 1400'' для оценки множеств условий для тканевого алгоритма оценки сигнала 1300'', показанного' на ФИГ. 66, который может быть реализован в одной форме генератора. На этапе 2352, генератор может определить, установлен ли флажок сохранения статуса 2354. Если нет, множество ответных действий, соответствующее множеству условий алгоритма 1400'', может быть запущено на этапе 2358. В определенных формах запуск множества ответных действий на этапе 2358 может эффективно отключать мониторинг нагрузки. Если флажок сохранения статуса 2354 установлен, алгоритм мониторинга нагрузки 2356 может быть выполнен. Алгоритм мониторинга нагрузки 2356 может либо запустить, либо отключить триггеры множества ответных действий в зависимости от того, выявлено ли событие нагружения или нет. Подробнее об алгоритме мониторинга нагрузки 2356 повествуется в этом документе далее в связи с ФИГ. 68. На этапе 2360, генератор может реализовать логическую схему для определения, выполняется ли нефильтрованное множество условий для оцениваемого множества условий. Логическая схема 2360 описана более подробно ниже в связи с ФИГ. 69 и может возвращать ответ в виде «истина» или «ложь».
На этапе 2368 генератор может определить, установлена ли защелка фильтрованного множества условий. Защелка фильтрованного множества условий может быть установлена, как описано далее, когда выполняется фильтрованное множество условий, например, чтобы гарантировать индикацию необходимости установки фильтрованного множества условий на протяжении порогового периода времени. Если установлена защелка фильтрованного множества условий, генератор увеличить таймер защелки на этапе 2365 и определить, выполняется ли нефильтрованное множество условий на этапе 2366. Если нефильтрованное множество условий выполняется, тогда логический поток 1400'' может вернуть индикацию того, что фильтрованное множество условий выполняется.
Если нефильтрованное множество условий не выполняется на этапе 2366, генератор может определить, выполняется ли все еще множество условий на этапе 2368. Например, генератор может определить, (i) превысил ли таймер защелки фильтрованного множества условий таймер Минимального времени защелкивания 1422; и (ii) больше ли наклон частоты, чем предел перекрестно-обратного наклона частоты 1424. Если эти условия выполняются, генератор может, на этапе 2378, расфиксировать защелку фильтрованного множества условий; сбросить таймер дребезга контактов (например, ТАЙМЕР X на ФИГ. 22); сбросить таймер защелки; сбросить таймер нагрузки (например, время превышения полного сопротивления), и отключить триггер множества ответных действий. Логический поток 1400'' может возвращать индикацию того, что фильтрованное множество условий не выполняется.
Снова возвращаясь к этапу 2362, отметим, что если защелка фильтрованного множества условий не установлена, генератор может определить, выполняется ли нефильтрованное множество условий на этапе 2364 (например, основываясь на значении, которое возвращается на этапе 2360). Если нет, таймер дребезга контактов может быть сброшен на этапе 1410, а логический поток 1400'' может возвратить индикацию того, что фильтрованное множество условий не выполняется. Если да, генератор может увеличить таймер дребезга контактов на этапе 1408. На этапе 1414, генератор может определить, больше ли таймер дребезга контактов, чем параметр требуемого параметра времени до срабатывания 1412, как описано ранее. Если да, алгоритм 1400'' может продолжить выполнение сценария вдоль ветки ДА, фиксируя защелку фильтрованного множества условий на этапе 1416 и возвращая индикацию того, что фильтрованное множество условий выполняется.
На ФИГ. 68 представлена логическая блок-схема одной формы алгоритма мониторинга нагрузки 2356, который может быть реализован в одной форме генератора, как показано на ФИГ. 67. Алгоритм мониторинга нагрузки 2356 может получить в качестве входных данных локальное ультразвуковое полное сопротивление и дельта качения (Fslope_дельта). В качестве выходных данных алгоритм 2356 может либо запустить, либо отключить соответствующее множество ответных действий. На этапе 2380, генератор может определить, превышает ли ультразвуковое полное сопротивление предел полного сопротивления 2381. Если да, генератор может увеличить таймер нагрузки на этапе 2382. таймер нагрузки может действовать для устранения дребезга локального ультразвукового полного сопротивления. Например, генератор может не учитывать, что ультразвуковое полное сопротивление выше предела 2381 до тех пор, пока оно не будет превышать предел на протяжении предопределенного количества тактов таймера.
На этапе 2384 генератор может определить, больше ли таймер нагрузки, чем параметр требуемого времени до срабатывания 2386. Если да, генератор может запустить триггер нагрузки на этапе 2396 и перейти к этапу 2398. Например, триггер нагрузки может быть запущен, когда ультразвуковое полное сопротивление свидетельствует о нарушении. Если нет, на этапе 2384, генератор может перейти прямо к этапу 2398, не запуская триггер нагрузки. На этапе 2398 генератор может определить, запущен ли триггер нагрузки. Если нет, алгоритм мониторинга установки нагрузки 2356 может возвращать индикацию о том, что и триггер нагрузки и триггер множества ответных действий не запущены. Если да, генератор может определить на этапе 2400, превышает ли дельта качения параметр предела наклона частоты 2402. Если нет, алгоритм 2356 может возвращать индикацию том, что триггер нагрузки установлен, а триггер множества ответных действий не запущен. Если да, триггер множества ответных действий может быть запущен на этапе 2404 и алгоритм 2356 может вернуться. Возвращаясь к этапу 2380, нужно отметить, что если ультразвуковое полное сопротивление не выше, чем предел полного сопротивления, генератор может сбросить таймер нагрузки на этапе 2388. На этапе 2390 генератор может определить, меньше ли ультразвуковое полное сопротивление, чем параметр предела сбрасывания полного сопротивления 2392. Если да, генератор может отключить триггер множества ответных действий и триггер нагрузки на этапе 2394. Если нет, генератор может перейти к этапу 2398, как описано ранее.
На ФИГ. 69 представлена логическая блок-схема для реализации одной формы логического устройства множества нефильтрованных условий 2360, показанного на ФИГ. 67, которое может быть реализовано одной формой генератора. На этапе 2406 генератор может определить, меньше ли локальный наклон частоты, чем пороговый параметр наклона частоты 1404. В некоторых формах пороговый параметр наклона частоты может зависеть от уровня мощности, подаваемого генератором, как описано ранее. Если локальный наклон частоты меньше, чем пороговый параметр наклона частоты 1404, генератор может, на этапе 2408, определить, меньше ли локальная резонансная частота, чем пороговый параметр частоты 1406. Если да, генератор может определить на этапе 2410, запущен ли триггер нагрузки и триггер множества ответных действий. Если да, алгоритм 2360 может возвращать индикацию того, что нефильтрованное множество условий выполняется. Если нет, генератор может определить, установлена ли защелка фильтрованного множества условий на этапе 2412. Если да, алгоритм 2360 может возвращать индикацию того, что нефильтрованное множество условий выполняется. Если нет на любом из этапов 2406, 2408 или 2412, алгоритм 2360 может возвращать индикацию того, что нефильтрованное множество условий не выполняется.
В некоторых формах 2406 и 2408 могут быть реализованы в порядке логического ИЛИ вместо логического И, как было описано. Например, после того, как было определено, что локальный наклон частоты меньше, чем пороговый параметр наклона частоты 1404, алгоритм может перейти непосредственно к этапу 2410. Аналогично, после того, как было определено, что локальный наклон частоты не меньше, чем пороговый параметр наклона частоты 1404, алгоритм может выполнить оценку резонансной частоты и порогового параметра частоты 1406 на этапе 2408.
Были описаны различные формы алгоритмов 1400, 1400' и 1400'' оценки множеств условий для тканевых алгоритмов оценки сигнала 1300, 1300', 1300''. Следует понимать, что любое количество алгоритмов оценки множества условий может применяться с любым из тканевых алгоритмов оценки сигнала 1300, 1300', 1300'', описанных в этом документе. Например, в определенных формах генератор может реализовать алгоритм оценки множества 1400, как описано в этом документе ранее, в сочетании с алгоритмом оценки множества условий 1400'', использующим триггер события нагружения. Любая подходящая комбинация алгоритмов 1300, 1300', 1300'', 1400, 1400', 1400'' может быть использована.
В некоторых возможных формах ультразвукового хирургического аппарата и генератора, ток поддерживается на относительно постоянном уровне. Это может установить по существу постоянное смещение для ультразвукового лезвия, что, в свою очередь, установит по существу постоянную скорость действий воздействия на ткань. В некоторых формах сила тока сохраняется даже несмотря на изменяющуюся механическую нагрузку, причем механическая нагрузка получает отражение в ультразвуковом полном сопротивлении. Чтобы достичь этого, изменения механической нагрузки могут быть по существу компенсированы путем модуляции приложенного напряжения.
Как описано в этом документе, для эффективной работы (например, минимизации избыточного тепла в преобразователе), хирургический аппарат (например, комбинация лезвия и преобразователя) может быть приведен в действие при резонансной частоте системы или при частоте, близкой к ней. Частота системы может быть определена через разность фаз между сигналами тока и напряжения. Как описано в этом документе, резонансная частота системы изменяется при изменении температуры. Например, дополнительная тепловая энергия (например, тепло) приводит к смягчению лезвия и/или других компонентов системы, изменяя таким образом резонансную частоту системы. Таким образом, генератор, в некоторых возможных формах реализует две петли регулирования. Первая петля поддерживает по существу постоянный ток для различных нагрузок, в то время как вторая петля регулирования отслеживает резонансную частоту системы и изменяет соответствующим образом управляющие электрические сигналы.
Как описано в этом документе, различные алгоритмы, применяемые с ультразвуковыми хирургическими аппаратами, аппроксимируют физические условия аппарата (например, его ультразвуковое лезвие) на основании электрических сигналов, подаваемых к аппарату. Например, на ФИГ. 58 и 65, закрытие прихвата определяется в ходе мониторинга ультразвукового полного сопротивления. Понятно, однако, что в любой из форм, описанных в этом документе, закрытие прихвата может быть альтернативно определено любым подходящим способом, например, на базе любого подходящего электрического сигнала, переданного аппарату, и/или его отклонений. В некоторых возможных формах, в которых сила тока сохраняется по существу постоянной, значение сигнала напряжения пропорционально ультразвуковому полному сопротивлению. Следовательно, различные ультразвуковые пределы полного сопротивления, описанные в этом документе, могут быть альтернативно реализованы в качестве пределов напряжения. Аналогично, в случаях, когда сила тока по существу постоянна, мощность или энергия, подаваемая к лезвию, также будет пропорциональна ультразвуковому полному сопротивлению, а соответствующие изменения мощности, энергии, изменения напряжения, мощности или энергии в зависимости от времени и т.д., также могут свидетельствовать о закрытии прихвата. К тому же, как показано в настоящем документе, когда прихват изначально закрывается, температура ультразвукового лезвия может падать, когда оно контактирует с прохладной тканью. Таким образом, закрытие лезвия может альтернативно определяться в ходе мониторинга падения температуры лезвия, на которое указывает либо повышение резонансной частоты лезвия и/или, либо один из других способов, описанных в этом документе. К тому же, в некоторых формах закрытие прихвата может определяться на основании выявления активации триггера закрытия и/или средства контроля за закрытием. Различные формы могут выявлять закрытие прихвата, используя комбинации некоторых или всех описанных характеристик электрического сигнала.
К тому же, например, события нагружения описаны в этом документе, например, со ссылкой на ФИГ. 65. На ФИГ. 65 и в связанном с ним описании события нагружения выявляются на основании дельта качения частоты. Различные другие характеристики электрических сигналов, передаваемых к аппарату, могут также использоваться для индикации события нагружения. Например, физические изменения, о которых свидетельствует дельта качения частоты, могут также быть определены с помощью сигнала напряжения, изменения сигнала напряжения в зависимости от времени, ультразвукового полного сопротивления, а также его наклона, производной частоты второго порядка, тока, изменения тока в зависимости от времени и т.д. К тому же, изменения температуры лезвия, как описано в этом документе, определяются на основании выявления изменений наклона частоты. Дополнительными характеристиками электрического сигнала, которые могут варьироваться в зависимости от температуры лезвия, могут являться, например, наклон мощности и/или энергии, подаваемой к лезвию.
В соответствии с различными формами ультразвуковой хирургический аппарат, такой как аппараты 100, 120, 1004 может быть приведен в действие в соответствии с управляющим алгоритмом, который включает приведение в действие аппарата последовательно на различных уровнях мощности. Например, когда ультразвуковой хирургический аппарат активируется, он может быть приведен в действие на первом уровне мощности. Например, генератор (например, генераторы 30, 500, 1002 и/или внутренний генератор) может подавать управляющий сигнал на первом уровне мощности. После завершения первого периода времени, генератор может подавать второй управляющий сигнал на втором уровне мощности, меньшем, чем первый уровень мощности. В некоторых применениях, первый, то есть более высокий уровень мощности, может использоваться для отделения внутреннего мышечного слоя сосуда от адвентициального слоя, как описано в этом документе.
На ФИГ. 71 представлена логическая блок-схема одной формы алгоритма 3021 для последовательного приведения в действие ультразвукового хирургического аппарата на двух уровнях мощности. На ФИГ. 70 представлен график, иллюстрирующий мощность или эпюру смещения для одного примера реализации алгоритма, представленного на ФИГ. 71. Алгоритм 3021 может быть реализован генератором, таким как генератор 30, 500, 1002 и/или внутренний генератор, для приведения в действие ультразвукового хирургического аппарата, такого как аппарат 100, 120, 1004. На ФИГ. 70 вертикальная ось 3002 соответствует смещению лезвия концевого зажима. Горизонтальная ось 3004 соответствует времени в секундах. Алгоритм 3021 описан в этом документе как алгоритм, реализуемый генератором, таким как один из генераторов 30, 500, 1002, описанных в этом документе. Следует понимать, что алгоритм 3021 может альтернативно реализовываться аппаратом, таким как аппарат 100, 120, 1004 (например, его контуром управления 2009).
На этапе 3020 генератор может получить запускающий сигнал, поданный врачом. Запускающий сигнал может быть подан любым подходящим образом. Например, в некоторых формах врач передает запускающий сигнал, используя кнопку или другое устройство ввода, расположенное непосредственно на аппарате, (например, кнопки 312a, 1036a, 1036b, 1036c, педальные приводы 434, 1020 и т.д.). На этапе 3022 генератор может активировать аппарат, передавая первый управляющий сигнал. Как показано на ФИГ. 70, индикация активации аппарата происходит на этапе 3006. Первый управляющий сигнал соответствует первому уровню мощности, подаваемому к концевому зажиму аппарата. На этапе 3024 генератор поддерживает первый управляющий сигнал в течение первого периода времени. Смещение концевого зажима, соответствующее первому управляющему сигналу обозначено на ФИГ. 70 на этапе 3009. Как показано в примере, изображенном на ФИГ. 70, первый уровень мощности соответствует смещению концевого зажима, равному от 60 до 120 микрон, например, приблизительно 75 микрон. Первый уровень мощности может быть выбран для отделения внутреннего мышечного слоя сосуда от адвентициального слоя и/или для предоставления других видов воздействия на ткань, которые направлены на улучшение процессов рассечения и/или уплотнения. В некоторых формах первый управляющий сигнал может также предоставлять отсутствие резонанса, как описано в этом документе, чтобы продолжать способствовать отделению внутреннего мышечного слоя сосуда от адвентициального слоя.
Генератор определяет, истек ли первый период времени на этапе 3026. Первый период времени может быть измерен любым подходящим образом. Например, в некоторых формах первый период времени представляет собой заданный период времени, который истекает спустя предопределенное количеств зависимости от времени после активации аппарата. В примере, показанном на ФИГ. 70, описан как раз такой случай, в котором первый период времени составляет одну секунду. К тому же, в некоторых формах первый период времени истекает, когда происходит определенное изменение состояния ткани. Любые изменения состояния ткани, описанные в этом документе, могут обозначать завершение первого периода времени и, например, может использоваться любой из алгоритмов, описанных в этом документе, для определения изменений состояния ткани. Например, в некоторых формах завершение первого периода времени может обозначаться изменением полного сопротивления преобразователя.
Когда первый период времени истекает, генератор предоставляет второй управляющий сигнал со вторым уровнем мощности на этапе 3028. В примере, изображенном на ФИГ. 70, переход от первого ко второму управляющему сигналу обозначен на этапе 3007. Смещение концевого зажима при втором управляющем сигнале обозначено на ФИГ. 70 равным между приблизительно 20 и 60 микрон, например, приблизительно 37,5 микрон. Хотя второй управляющий сигнал на ФИГ. 70 показан как непрерывный, следует понимать, что, в некоторых формах второй управляющий сигнал представляет собой импульсный управляющий сигнал, например, как описано в этом документе. Второй управляющий сигнал может передаваться аппарату до любой подходящей конечной точки. Например, как показано на ФИГ. 70, завершение рассечения ткани обозначено на этапе 3008. Деактивация аппарата обозначена на этапе 3010. В некоторых формах рассечение ткани может быть определено с помощью любого и алгоритмов определения изменений состояния ткани, описанных в этом документе. В некоторых формах генератор может автоматически деактивировать аппарат либо в точке рассечения 3008 и/или после нее (например, через определенное время после нее).
Алгоритм 3021 может улучшить производительность аппарата о сравнению с простой активацией аппарата на одном уровне мощности. На ФИГ. 72 представлен график, изображающий давления разрыва, испытываемое хирургическим аппаратом, подобным аппарату 1004, который работает согласно алгоритму, показанному на ФИГ. 71 (3030), путем приведения в действие аппарата 1004 на одном уровне мощности (3032). В примере, показанном на ФИГ. 72, график 3032 соответствует аппарату 1004, активированному на одном уровне мощности, соответствующем второму уровню мощности алгоритма 3021. И испытания алгоритма 3021, и испытания при одном уровне мощности проводились на 5-7-миллиметровой сонной артерии свиньи. Видно, что алгоритм 3012 приводит к более высоким давлениям разрыва, которые могут соответствовать более качественным уплотнениям и рассечениям. На ФИГ. 73 представлен график, изображающий времена рассечений для пробных процедур, указанных на ФИГ. 72. Видно, что алгоритм 3021 может предоставлять недосягаемые времена рассечения.
При использовании алгоритм 3021 может быть потенциально неправильно использован врачами. Например, на ФИГ. 74 представлен график 3040, изображающий схему управляющего сигнала в соответствии с одной формой алгоритма 3021. На ФИГ. 74 вертикальная ось 3042 соответствует предоставляемому уровню мощности, а горизонтальная ось 3004 соответствует времени. Первый и второй уровни мощности обозначены на оси 3042 позициями «5» и «1», соответственно. Например, при реализации с генератором GEN 11 производства компании «Ethicon Endo-Surgery, Inc.», г. Цинциннати, штат Огайо, «5» может соответствовать уровню мощности «5», а «1» может соответствовать уровню мощности «1». Как показано, врач активировал (3006) и деактивировал (3010) аппарат несколько раз подряд, не завершая рассечение ткани. Как показано, врач деактивировал аппарат вблизи начала второго (менее мощного) управляющего сигнала, чтобы вновь активировать аппарат и восстановить первый (более мощный) управляющий сигнал. Следует понимать, что такой тип использования может помешать запроектированному порядку работы алгоритма 3021. В некоторых формах алгоритм 3021 может быть изменен для реализации времени отдыха между деактивацией 3010 и последующей активацией 3006.
На ФИГ. 75 представлена логическая блок-схема другой формы алгоритма 3021', изображающая паузу между деактивацией аппарата и его последующей активацией. Алгоритм 3021' может быть реализован генератором, таким как генератор 30, 500, 1002 и/или внутренний генератор, для приведения в действие ультразвукового хирургического аппарата, такого как аппарат 100, 120, 1004. После получения запускающего сигнала на этапе 3020 генератор может определить на этапе 3050, прошло ли время отдыха с момента последней активации аппарата. В различных формах время отдыха выбирается с тем, чтобы соответствовать количеству времени, которое было бы достаточно, чтобы ультразвуковое лезвие и/или ткань вернулись в состояние отдыха. В одной возможной форме, время отдыха составляет четыре секунды. Если время отдыха истекло, алгоритм 3021' может перейти к действиям 3022, 3024, 3026 и/или 3028, как описано в этом документе ранее. Если время отдыха не истекло на этапе 3050, генератор может на этапе 3052 предоставить инструменту управляющий сигнал на втором уровне мощности (например, меньшем из уровней мощности алгоритма 3021'). Таким образом, если период отдыха не истек с момента предыдущей деактивации, алгоритм 3021' может продолжить с точки, которую он покинул при деактивации.
На ФИГ. 76 представлен график, изображающий схему управляющего сигнала в соответствии с одной формой алгоритма 3021'. Врач может активировать аппарат на этапе 3056. Когда управляющий сигнал был передан, врач деактивирует аппарат на этапе 3058. Например, деактивация 3058 может произойти до того, как уплотнение и рассечение ткани будет завершено. На этапе 3660 врач повторно активирует аппарат, например, путем генерирования запускающего сигнала, как описано в этом документе ранее. Как показано, впрочем, время отдыха не истекло перед повторной активацией на этапе 3660. Таким образом, генератор на этапе 3660 передает управляющий сигнал на втором уровне мощности. После деактивации на этапе 3062, впрочем, время отдыха не истекло перед повторной активацией на этапе 3064. Таким образом, генератор передает управляющий сигнал на первом уровне мощности, и алгоритм 3021' продолжает работу, как показано на ФИГ. 70.
В различных формах алгоритм 3021' может быть реализован с использованием чередующегося логического условия вместо времени отдыха. Например, вместо определения того, истекло ли время отдыха на этапе 3050, генератор может определить, выполнено ли чередующееся логическое условие. Чередующееся логическое условие может представлять собой любое подходящее условие, в том числе, например, индикатор состояния аппарата и/или ткани, на которую он воздействует. В некоторых формах логическое условие может представлять собой или быть связанным с температурой концевого зажима. Например, чередующееся логическое условие может быть основано на резонансной частоте ультразвуковой приводной системы и концевого зажима, обозначенной частотой управляющего сигнала. Если частота выше порогового значения (что означает, что температура концевого зажима температура ниже порогового значения), алгоритм 3021' может перейти к действиям 3022, 3024, 3026, 3028, как описано. Частота управляющей частоты может быть измерена любым способом в том числе, например, способами, описанными в этом документе ранее со ссылкой на ФИГ. 21 выше. В другом примере, чередующееся логическое условие может быть основано на полном сопротивлении ультразвукового преобразователя, которое может служить другим представителем температуры концевого зажима, как описано в этом документе ранее со ссылкой на ФИГ. 10-13. Также, в некоторых формах температура концевого зажима может быть измерена датчиком температуры, установленном на концевом зажиме, например, датчиком температуры 3070, расположенном на концевом зажиме 1026, показанном на ФИГ. 16A.
На ФИГ. 77 представлена логическая блок-схема другой формы алгоритма 3021'', реализующая третий управляющий сигнал. Алгоритм 3021'' может быть реализован генератором, таким как генератор 30, 500, 1002 и/или внутренний генератор, для приведения в действие ультразвукового хирургического аппарата, такого как аппарат 100, 120, 1004. Генератор может выполнить действия 3020, 3022, 3024, 3026, 3028, как описано ранее со ссылкой на ФИГ. 71. После передачи второго управляющего сигнала на этапе 3028, однако, генератор может поддерживать второй управляющий сигнал на этапе 3070 до истечения второго периода времени на этапе 3072. По истечению второго периода времени генератор может передать третий управляющий сигнал на этапе 3074. Третий управляющий сигнал предоставляется на третьем уровне мощности, который может быть больше второй мощности и меньше первой мощности. Например, в одной возможной форме, второй уровень мощности составляет 45% первого уровня мощности. Уровень третьей мощности может составлять, например 100%, 75% и т.д. первого уровня мощности. Первый и второй периоды времени могут составлять, например, 1,5 секунды и 12 секунд, соответственно. Следует понимать, что алгоритм 3021'' может быть реализован с периодом времени отдыха, например, как алгоритм 3021'. Например, действия 3070, 3072 и 3074 могут выполняться после действия 3028, как показано на ФИГ. 75.
В различных формах алгоритм 3021'' может привести к повышению давлений разрыва и сокращению времен рассечения по сравнению с алгоритмом 3021, показанным на ФИГ. 71. Например, на ФИГ. 79 представлен график, изображающий давления разрыва, испытываемые хирургическим аппаратом, аналогичным аппарату 1004, который работает согласно алгоритму 3021, в сравнении с хирургическим аппаратом, который работает по алгоритму 3021''. Как показано, давление разрыва для алгоритма 3021'' выше, чем давление разрыва для алгоритма 3021. Аналогично, ФИГ. 80 представляет собой график, изображающий времена рассечения для пробных процедур, указанных на ФИГ. 79. Как показано, времена рассечения для алгоритма 3021'' ниже времен рассечения для алгоритма 3021. К тому же, в некоторых формах, в которых алгоритм 3021'' применяется в сочетании с другим алгоритмом предоставления обратной связи (например, множества ответных действий) при выявлении изменения состояния ткани (например, множества условий), передача третьего, более мощного, управляющего сигнала может увеличить эффективность алгоритмов, описанных в этом документе для определения изменения состояния ткани.
В некоторых формах алгоритмы 3021, 3021', 3021'' могут быть реализованы в сочетании с различными другими алгоритмами, описанными в этом документе. Например, любые алгоритмы 3021, 3021', 3021'' могут быть реализованы в сочетании с множеством условий и/или множеством ответных действий, основанных на измеренной характеристике аппарата и/или ткани, на которую воздействует аппарат. Например, алгоритмы 3021, 3021', 3021'' могут быть реализованы с одним из алгоритмов, описанных в этом документе выше со ссылкой на ФИГ. 15A-15C, ФИГ. 20-22, ФИГ. 57-60 и т.д. Когда множество условий подает сигнал о состоянии ткани, в верхней части алгоритмов 3021, 3021', 3021'' может быть выполнено соответствующее множество ответных действий. Например, когда сработавшее множество условий запрашивает обратную связь, обратная связь может быть предоставлена, в то время как алгоритм 3021, 3021', 3021'' продолжает выполняться. К тому же, например, когда сработавшее множество условий запрашивает изменение управляющего сигнала, генератор может отойти от выполнения алгоритма 3021, 3021', 3021'' в соответствии с запущенным множеством ответных действий.
На ФИГ. 81 представлена логическая блок-схема одной формы алгоритма 3100, изображающая исходный период зажимания. Алгоритм 3100 может быть реализован генератором, таким как генератор 30, 500, 1002 и/или внутренний генератор, для приведения в действие ультразвукового хирургического аппарата, такого как аппарат 100, 120, 1004. На этапе 3102 генератор может получить запрос активации, например, как описано в этом документе ранее со ссылкой на запрос активации 3020. На этапе 3104 генератор может предоставить обратную связь, свидетельствующую о том, что аппарат был активирован. Обратная связь может представлять собой звуковую, визуальную и/или тактильную обратную связь, как описано в этом документе. Однако, в момент предоставления обратной связи аппарат еще не активирован. Таким образом, алгоритм 3100 может предоставить концевому зажиму время для сжимания ткани до активации аппарата с целью повышения эффективности рассечения и уплотнения. На этапе 3106 концевой зажим может определить, истек ли первый период времени. Первый период времени может составлять, например, несколько секунд. По истечении первого периода времени, генератор может активировать аппарат и начать выполнение управляющего алгоритма. Управляющий алгоритм может представлять собой любой подходящий алгоритм, в том числе, например, любой из алгоритмов 3021, 3021', 3201''. Например, как показано на ФИГ. 71, действия 3104, 3106 будут выполнены после получения запускающего сигнала 3020. Действие 3022 будет выполнено для соответствия этапу 3108.
На ФИГ. 82 представлена логическая блок-схема другой формы алгоритма 3120, изображающая исходный период зажимания. Алгоритм 3021'' может быть реализован генератором, таким как генератор 30, 500, 1002 и/или внутренний генератор, для приведения в действие ультразвукового хирургического аппарата, такого как аппарат 100, 120, 1004. Например, алгоритм 3120 может реализовать исходный период зажимания в сочетании со ступенчатой функцией, например, ступенчатой функцией, описанной в этом документе ранее со ссылкой на ФИГ. 6-8. Как показано на ФИГ. 82, генератор может выполнять действия 3102, 3104 и 3106, как описано в этом документе со ссылкой на ФИГ. 81. На этапе 3122 генератор может передать первый управляющий сигнал 3122 на первом уровне. Первый уровень может соответствовать силе тока, мощности, смещению концевого зажима и т.д. По истечении второго периода времени на этапе 3124 генератор передает второй управляющий сигнал на этапе 3126. Второй управляющий сигнал соответствует силе тока, мощности и/или смещению концевого зажима на более высоком уровне по сравнению с первым уровнем. Второй управляющий сигнал может сохраняться до тех пор, пока генератор выявит изменение состояния ткани такое как, например, падение наклона частоты ниже порогового наклона частоты на этапе 3128. При возникновении такого события, генератор может передать третий управляющий сигнал на этапе 3130. Третий управляющий сигнал может сохраняться, например, до тех пор, пока не произойдет дополнительное изменение состояния ткани (например, рассечение), например, как определено алгоритмом, таким как алгоритмы, описанные ранее со ссылкой на ФИГ. 15A-15C, ФИГ. 20-22, ФИГ. 57-60 и т.д.
На ФИГ. 83 представлен график, изображающий схему управляющего сигнала в соответствии с алгоритмом 3120. Вертикальная ось 3132 соответствует силе тока управляющего сигнала, а горизонтальная ось 3134 соответствует времени. Запускающий сигнал получают на этапе 3092. Первый период времени представлен позицией 3096. Второй период времени с первым управляющим сигналом указан на этапе 3097. Второй управляющий сигнал предоставляется на этапе 3098 до тех пор, пока условие предела наклона частоты выполняется на этапе 3135, после чего этап 3099 распознает управляющий сигнал. Рассечение указано на этапе 3008, а деактивация на этапе 3094.
Как описано ранее, любой из алгоритмов, описанный в этом документе, в том числе 3021, 3021', 3021'', 3100, 3120 и т.д., могут быть реализованы в сочетании с алгоритмом реализации множества условий и множества ответных действий. Множество условий, например, может быть признано истинным на основании наличия или отсутствия конкретного состояния ультразвукового хирургического аппарата и/или ткани, на которую воздействует ультразвуковой хирургический аппарат. Множество ответных действий может определять действия, которые должен предпринять аппарат и/или генератор, когда множество условий становится истинным. В некоторых формах различные множества условий могут быть оценены с помощь использования одной или нескольких моделей с несколькими переменными. Примерами моделей с несколькими переменными могут быть, например, модели нейронной сети, модели генетических алгоритмов, моделей классифицирующего разветвленного алгоритма, рекурсивные Байесовы модели и т.д.
Один из подходящий видов моделей с несколькими переменными содержит нейронную сеть. Нейронные сети могут быть эффективными для распознания сложных картин входных переменных, из-за чего они хорошо подходят для определения множеств условий на основе состояния ткани (например, имело ли место рассечение, имело ли место уплотнение и т.д.). На ФИГ. 84 представлена диаграмма, изображающая примерную нейронную сеть 3150. Нейронная сеть 3150 содержит группу связанных между собой узлов 3152, 3154, 3156, называемых нейронами. Связи между различными нейронами указывают на то, как данные передаются по сети. Входным нейронам 3152 присваиваются значения, взятые из входных данных (например, различные параметры хирургического аппарата, управляющий сигнал и т.д.). В различных формах входные переменные масштабируются до значений между нулем и единицей. Значения входных нейронов 3152 (например, входные переменные) затем применяются для расчета значений различных скрытых нейронов 3154, которые, в свою очередь, используются для нахождения значения одного или нескольких выходных нейронов 3156. Значение выходного нейрона 3156 может запустить (или не запустить) множество ответных действий такое как, например, обратная связь и/или изменения управляющего сигнала. На практике, количество соответствующих входных узлов 3153, скрытых узлов 3154 и выходных узлов 3156 могут отличаться, иногда значительно, от количества, показанного на ФИГ. 84. В различных формах нейронная сеть работает с циклом данных. Во время каждого цикла входные значения предоставляются входным нейронам 3152, а выходные значения принимаются в качестве выходных узлов 3156.
Нейронные сети могут быть полностью связанными, как показано на ФИГ. 84, что означает, что каждый входной нейрон 3152 связан с каждым скрытым нейроном 3154. Некоторые формы могут использовать нейронную сеть, которая не является полностью связанной. Например, не все из входных узлов могут быть связаны с каждым скрытым нейроном 3154. Значения для скрытых узлов 3154 могут быть определены в соответствии с функцией активации. В различных формах выходные данные функции активации находятся в диапазоне от 0 до 1. Например, выходная функция может быть выбрана для генерации выходных данных в диапазоне между 0 и 1 или, в некоторых формах результаты выходной функции могут быть масштабированы. В некоторых формах полезно выбирать непрерывные и дифференцируемые функции. Это может способствовать обучению нейронной сети. Например, обучение обратному распространению, применяющее градиентный метод, может потребовать вычисление частных производных выходной функции, которая может быть упрощена, если функции оптимизации непрерывны и дифференцируемы. Одним примером такой функции, которая может быть использована в качестве функций активации, является сигмоидальная функция, как указано в уравнении (8) ниже:

В уравнении (8), ξ соответствует значениям входных нейронов, ω соответствует весу, присвоенному каждому входу, θ является константой. Если нейронная сеть полностью связана, значения всех входных нейронов передаются всем скрытым нейронам, что означает, что функция активации для каждого скрытого нейрона будет содержать ξ, соответствующее каждому входному узлу. Веса, присвоенные каждому входу (ω) могут быть уникальны для каждого скрытого нейрона и/или каждого входного значения. Константа θ может также быть уникальной для каждого скрытого нейрона 3154. Результаты в каждом узле могут быть предоставлены уравнениями (9) и (10) ниже:
На ФИГ. 85 представлен график одной возможной реализации уравнения (9), демонстрирующей, что функция непрерывна и дифференцируема.

Выходные данные сигмоидальной функции показаны на ФИГ. 86. Например, выходное значение (O) может быть рассчитано на основании взвешенной суммы входных нейронов и тета (например, уравнение (8)), примененной в уравнении (9).
В различных формах каждый скрытый нейрон имеет I входные данные, равные количеству входов в нейронную сеть. Если в ней присутствуют J скрытые нейроны 3154, тогда существует I×J уникальных значений для омега (ω) и J уникальных значений для (θ). В некоторых формах выходной(-ые) нейрон(-ы) 3156 могут использовать такое же уравнение активации. Таким образом, может существовать J×K уникальных значений омега (ω), связывающих скрытые нейроны 3154 с выходным нейроном 3156, где K представляет собой количество выходных нейронов, и K уникальных значений тета (θ) для выходного(-ых) узла(-ов) 3156.
Выход нейронной сети может указывать на истинность или ложность множества условий, содержащего одно или более условий ультразвукового хирургического аппарата, ткани, на которую воздействует хирургический аппарат или некоторой их комбинации. Например, нейронная сеть может быть использована для моделирования множества условий, указывающих на необходимость предоставления обратной связи, сигнализирующей о рассечении ткани в точке отделения или вблизи нее. Например, в некоторых формах выходной сигнал нейронной сети может указывать на выполнение 80% рассечения. Может использоваться любое подходящее количество и тип нейронов 3152, 3154, 3156. Например, нейронная сеть 3150 может содержать 12 входных нейронов 3152, (I=12), 4 скрытых нейрона (J=4) и один выходной нейрон (K=1). Цикл данных может составлять 10 миллисекунд. Таким образом, значения для 12 входов могут подаваться в сеть 3150, а результаты могут вычисляться каждые 10 миллисекунд.
Входные переменные (например, переменные, соответствующие входным узлам 3152) могут содержать любые переменные, которые могут в некоторых обстоятельствах оказывать влияние на значение выходного узла 3156. Возможные входные переменные, описанные далее, могут использоваться в нейронной сети, такой как 3154, имеющей выходной узел или узлы, соответствующие любому связанному с ультразвуковым хирургическим аппаратом значению такому как, например, 80% рассечения. Следует понимать, что входные переменные, описанные в этом документе, могут быть также использованы в любом другом подходящем типе модели, в том числе, например, в модели генетических алгоритмов, модели классифицирующего разветвленного алгоритма, рекурсивной Байесовой модели и т.д.
В некоторых формах входные переменные, соответствующие входным узлам 3152, содержат переменные, описывающие работу хирургической системы во время обработки ткани. Обработка ткани, например, может начаться, когда хирургическая система активируется на ткани. Примеры входных переменных обработки ткани описаны далее:
Время, прошедшее с момента активации входной переменной, может представлять время с момента активации аппарата (например, в начале обработки ткани). Время может быть измерено с любыми подходящими инкрементами, в том числе, например, 10 миллисекунд (0,010 секунд) с начала активации аппарата (например, 0,00 секунд). В некоторых формах время, прошедшее с момента активации, измеряется и сохраняется генератором.
Различные переменные могут быть использованы для описания работы ультразвукового преобразователя или рукоятки, в том числе, например, падение напряжения на преобразователе, ток, потребляемый преобразователем, и полное сопротивление преобразователя. Значения этих и подобных переменных могут считываться и сохраняться (например, генератором) с любыми подходящими интервалами. Например, значения напряжения, силы тока и/или полного сопротивления могут считываться с интервалом, равным циклу данных нейронной сети 3150.
Дополнительные входные переменные описывают различные изменения напряжения, силы тока и/или полного сопротивления преобразователя на притяжении предопределенных промежутков времени. Например, средние значения напряжения, силы тока или полного сопротивления могут быть рассчитаны за весь период активации (например, описанный временем, прошедшим с момента активации). К тому же, в некоторых формах средние значения напряжения, силы тока или полного сопротивления вычисляются за заранее заданное количество предыдущих проб. Например, среднее полное сопротивление может быть вычислено для A последних проб полного сопротивления, где A может быть равно 10. Мощность, энергия и различные другие значения, которые могут быть получены исходя из напряжения, силы тока и/или полного сопротивления, могут быть также вычислены как отдельные входные переменные или в рамках различных изменений. Например, полная энергия используется в качестве входной переменной в некоторых формах. Полная энергия может обозначать сумму энергии, поданной к ультразвуковой системе с момента активации. Эта сумма может быть получена, например, умножением сложения мощности на время активации. Кривая или форма полного сопротивления указывает на изменения полного сопротивления с момента активации. В некоторых формах подгонка по многозвенной функции или другая функция сглаживания может быть применена к кривой полного сопротивления. Применение функции сглаживания может подчеркнуть точки перегиба, наличие или положение которой может быть использовано в качестве входных переменных. Например, кривая полного сопротивления, в некоторых формах может претерпеть внезапное падение во время выполнения разреза. Различные возможные входные переменные, такие как кривая полного сопротивления, писаны в виде кривой или массива значений. Такие переменные могут представлять собой входные данные для нейронной сети 3150 или подобной модели в любой подходящей форме, в том числе, например, посредством вычисления площади под кривой, вычисления одного или более пиковых значений, вычисления среднего или скользящего среднего значения кривой и т.д. В некоторых формах интегралы, пики, средние значения и т.д. различных кривых могут быть ограничены, чтобы исключить влияние переходных процессов, возникающих в результате активации. Дополнительные переменные могут содержать, например, полную энергию (например, с момента активации), полное изменение полного сопротивления (например, с момента активации) и т.д.
Различные входные переменные основываются на резонансной частоте хирургической системы (например, преобразователя, волновода и лезвия). Резонансная частота хирургической системы может проявляться в частоте управляющего сигнала. Например, как описано в этом документе, генератор может быть включен для приведения в действие хирургической системы (например, для предоставления управляющего сигнала) при резонансной частоте системы. В некоторых формах сама по себе резонансная частота (например, текущая или мгновенная резонансная частота) может быть входной переменной. Образец резонансной частоты может отбираться с любым подходящим интервалом таким как, например, с интервалом, равным циклу данных нейронной сети или другой модели. Другой пример переменной резонансной частоты описывает изменение резонансной частоты в течение процедуры обработки ткани. Например, изменение резонансной частоты может быть задано равным разности между текущим значением резонансной частоты и значением частоты в момент активации и/или в заданной точке после активации (например, 0,5 секунд после активации). Другая переменная резонансной частоты описывает производную частоты dF/dt или мгновенный наклон резонансной частоты. Дополнительная переменная резонансной частоты может быть получена вычислением среднего значения производных частоты. Один пример среднего значения содержит все значения производной частоты с момента активации и/или значения производной частоты за предопределенный период времени, такой как, например, последние 10 циклов данных нейронной сети 3150. В некоторых формах множественные средние переменные производной частоты могут использоваться, при этом каждая переменная может вычисляться за отличный период времени (например, разное количество прошедших циклов данных нейронной сети 3150 или другой модели). Различные изменения переменных резонансной частоты, описанные в этом документе, также могут использоваться. Один пример переменной резонансной частоты описывает максимальное среднее значение производных частоты, вычисленное за предыдущие A средних значений dFdt, где A может соответствовать количеству циклов данных нейронной сети 3150 или другой модели. Например, A может равняться 10. Другим примером входной переменной является запас устойчивости по фазе. Запас устойчивости по фазе описывает разность фаз управляющего сигнала и смещения лезвия. Запас устойчивости по фазе может быть измерен любым подходящим образом, например, как описано в патенте США этого же автора №6,678,621 под заголовком «Управление выходным смещением с использованием запаса устойчивости по фазе в ультразвуковой рукоятке», текст которого во всей своей полноте включен в настоящее описание путем отсылки.
В различных формах нейронная сеть 3150 или другая модель получает входные переменные, содержащие значения, описывающие специфическую хирургическую систему (например, переменные, характерные для конкретной системы). Переменные, характерные для конкретной системы, могут описывать характеристики любого компонента или группы компонентов хирургической системы, в том числе, например, рукоятки, лезвия, волновода, концевого зажима, прихвата, подушки для скобок и т.д. Таким образом, переменные, характерные для конкретной системы, могут служить для предоставления «отпечатка пальца» каждой хирургической системы. Различные переменные, характерные для конкретной системы, могут быть измерены и применены различными способами. Например, переменные, характерные для конкретной системы, могут быть использованы как для обучения, так и для выполнения нейронной сети 3150 или других моделей.
Некоторые переменные, характерные для конкретной системы, описывают характеристики хирургической системы или ее компонентов, которые могут быть измерены физически. Длина системы описывает длину хирургической системы (например, ее волновод и лезвие). Возможная длина включает 23 см, 36 см и 45 см. В некоторых формах отдельные нейронные сети 3150 могут быть обучены и применены для систем, имеющих разные длины, однако, этого можно избежать путем использования длины системы в качестве входной переменной.
Некоторые входные переменные, характерные для конкретной системы, описывают характеристики ультразвукового лезвия. Например, отдельный коэффициент усиления лезвия описывает отношение увеличения или уменьшения отклонения от преобразователя к кончику лезвия (например, коэффициент усиления лезвия может описывать комбинацию лезвия и волновода). Коэффициент усиления любого заданного ультразвукового лезвия может быть определен физическими характеристиками самого лезвия, в том числе, например, неоднородностями диаметра лезвия. Разные лезвия, изготовленные по одним и тем же спецификациям, могут иметь немного отличающиеся коэффициенты усиления, например, из-за допусков изготовления. Например, коэффициент усиления для одного подходящего лезвия может составить 3,5±0,2. В различных формах коэффициент усиления лезвия измеряется во время изготовления и/или испытания хирургической системы. Например, лазерный виброметр или другой подходящий инструмент может использоваться для измерения отклонения лезвия, когда оно приводится в действие генератором и рукояткой с известными коэффициентами усиления.
Другая переменная, характерная для конкретного лезвия, представляет собой естественную резонансную частоту лезвия. Она также может называться резонансной частотой покоя. Естественная резонансная частота представляет собой функцию физических свойств лезвия. В различных формах естественная резонансная частота измеряется во время изготовления или испытания лезвия (или связанной системы), например с использованием импульсного возбуждения или испытания акустическим импульсом. В соответствии с испытанием акустическим импульсом, звуковые волны или вибрации в некотором диапазоне частот передаются к (обычно ненагруженному) лезвию. Частота, при которой лезвие резонирует, записывается. Например, микрофон или другой аудиодатчик может быть использован для записи ответа лезвия на акустические импульсы различных частот. Частотное содержание измеренных значений может быть проанализировано для определения резонанса. Другая переменная, характерная для конкретного лезвия, представляет собой коэффициент Q лезвия. Коэффициент Q описывает широтный диапазон лезвия относительно его центральной частоты. Другими словами, коэффициент Q описывает, насколько плотным является частотный спектр лезвия вблизи резонансной частоты. Коэффициент Q может быть измерен, например, с помощью обычного оборудования спектрального анализа, например, во время изготовления или испытания лезвия или связанной системы.
Дополнительная переменная, характерная для конкретного лезвия, представляет собой длину лезвия. Например, из-за допусков изготовления не каждое лезвие одной и той же конструкции будет иметь одинаковую длину. Точные длины лезвий могут быть измерены любым подходящим способом измерения, в том числе, например, микрометром, оптическими системами, координатно-измерительными машинами и т.д. Отклонение лезвия описывает степень, с которой отклоняется лезвие, входя в контакт с прихватом. Степень отклонения лезвия может быть измерена, например, с помощью бесконтактного лазерного инструмента измерения смещения, циферблатного индикатора или любого другого подходящего инструмента. Различные акустические характеристики лезвий могут также использоваться в качестве входных переменных, характерных для конкретного лезвия. Коэффициент Пуассона для разных лезвий может быть измерен с помощью тензометра для измерения поперечного и осевого напряжения и/или может быть выбран для материала лезвия. Скорость звука для разных лезвий может быть также измерена и/или выбрана для материалов лезвия. Другие акустические характеристики, которые представляют собой потенциальные входные переменные, включают фазовую скорость, плотность, сжимаемость или жесткость, коэффициент объемного сжатия и т.д. Например, многие акустические характеристики лезвий, подушек для скобок и т.д. предоставляться производителями материалов.
Дополнительные переменные, характерные для конкретного лезвия, включают коэффициент поверхностного трения и проецируемую поверхность уплотнения. Коэффициент поверхностного трения может соответствовать моделям воздействий на ткани, поскольку коэффициент поверхностного трения может зависеть от мощности, подаваемой к ткани, например, в соответствии с уравнением (11) ниже:
Мощность = μ×2π* d* f* N (11)
В уравнении (11), μ представляет собой коэффициент поверхностного трения (например, динамическое трение); f представляет собой частоту управляющего сигнала (например, резонансную частоту системы); N представляет собой нормальную силу, а d представляет собой смещение лезвия. Коэффициент поверхностного трения может быть измерен любым подходящим способом. Например, лезвие может быть установлено на поворотный стол и вращаться в то время, как к нему будет приложена нормальная сила. В некоторых формах уравнение (11) выше также учитывает проецируемую поверхность уплотнения, как указано в уравнении (12) ниже:
Плотность мощности = (μ×2π* d* f* N)/SS (12)
В уравнении (12), SS представляет собой проецируемую поверхность уплотнения. Проецируемая поверхность уплотнения может быть оценена, например, исходя из геометрической конфигурации лезвия. Например, длина, ширина и кривизна лезвия могут быть соответствующими. Относительным примером входной переменной являются циферблат лезвия. Например, в некоторых формах лезвие имеет искривленную форму. Циферблат лезвия описывает угловое направление кривизны лезвия относительно продольной оси.
В различных формах способ, которым хирургическая система действует на ткань, зависит от способа, которым прихват и лезвие захватывают ткань. Это, в свою очередь, может зависеть от различных характерных для конкретной системы размеров и других характеристик. Например, различные переменные, характерные для конкретной системы, описывает взаимодействие лезвия, прихвата и подушки для скобок. Одна такая возможная входная переменная представляют собой силу зажимания между лезвием и прихватом. Например, сила зажимания может соответствовать FT, описанной в этом документе ранее со ссылкой на уравнение (1). Сила зажимания может быть измерена любым подходящим способом. Например, со ссылкой на хирургическую систему 19, показанную со ссылкой на ФИГ. 1-3, прихват 56 может быть закреплен в открытом положении (например, не в контакте с лезвием 79). Датчик силы может быть закреплен на прихвате 56, например, в средней точке между шарниром и наиболее дистальным концом прихвата 56. Затем рукоятка 68 может быть приведена в действие для закрытия прихвата 56 в направлении лезвия 79. Датчик силы может измерять прилагаемую силу. В некоторых формах может выполняться мониторинг положения срабатывания для определения входной переменной, выражающей изменение силы зажимания в зависимости от положения срабатывания. В некоторых формах используется максимальная сила. В некоторых формах сила зажимания измеряется, когда прихват зафиксирован в открытых положениях. Например, датчик давления, такой как датчик давления «TEKSCAN», может быть размещен между лезвием и прихватом.
Аналогичными переменными являются смещение триггера, усилие срабатывания и упругая сила компоновочного узла трубки. Смещение триггера представляет собой расстояние, на которое триггер 34, 4120 (ФИГ. 93) поворачивается для закрытия прихвата в направлении лезвия. Смещение триггера может соответствовать степени, с которой смещается пружина для закрытия прихвата. Например, пружина 5051 показана на ФИГ. 105. Обратимся теперь к ФИГ. 93, 95 и 105. Хотя пружина 5051 конкретно не показана на ФИГ. 95, следует понимать, что пружина 5051 или аналогичная ей пружина, может быть соединена с хомутом 4174, показанном на ФИГ. 95, и с рукояткой 4122, аналогично тому, как показано на ФИГ. 105. Как описано со ссылкой на ФИГ. 93 и 95, проксимальное движение триггера 4120 приводит к дистальному движению хомута 4174 и возвратно-поступательному передвижению трубчатого приводного элемента 4138, чтобы закрыть прихват 4150 и лезвие 4152. По мере того как хомут 4174 перемещается дистально, он может растягивать пружину 5051. Таким образом, смещение триггера (например, триггера 4120) указывает на растяжение пружины (например, пружины 5051) и, следовательно, может служить в качестве представителя силы зажимания. Усилие срабатывания (например, усилие, необходимое для срабатывания) может также использоваться в качестве входной переменной. Смещение триггера и сила срабатывания могут быть измерены любым подходящим способом. В некоторых формах усилие компоновочного узла трубки может также измеряться и использоваться в качестве входной переменной. Например, со ссылкой на ФИГ. 95, усилие компоновочного узла трубки представляет собой силу, сообщенную прихвату 4150 и лезвию 4152 активирующим элементом 138, выполняющим возвратно-поступательное движение. Различные смещения и силы, описанные в этом документе, могут быть измерены любым подходящим способом, с использованием любого подходящего оборудования, в том числе, например, визуальных измерительных систем, тензометров, циферблатных указателей и т.д.
Другие подходящие переменные, связанные с зажиманием, связаны с профилем давления. Профиль давления описывает распространение давления по лезвию и прихвачу, когда прихват закрывается. Профиль зажимания может быть измерен любым подходящим способом. Например, датчик давления, такой как датчик давления «TEKSCAN», может быть размещен между лезвием и прихватом. Прихват затем может быть закрыт (например, с помощью триггера 34 и/или триггера 4120, описанного в этом документе), а результирующая сила (и/или распространение силы) измерено. В некоторых формах силы зажимания могут быть отмечены менее чем на протяжении всей длины прихвата. Например, сила зажимания в конкретном положении на прихвате или лезвии (например, в проксимальной части прихвата) может быть использована в качестве входной переменной нейронной сети 3150 или другой подходящей модели.
Различные другие входные переменные, связанные с зажиманием, включают отклонение прихвата, положение или ход прихвата, угол между браншами при полностью открытом триггере и высота подушки. Отклонение прихвата представляет собой меру степени отклонения в прихвате при его закрытии в направлении лезвия. Положение или ход прихвата, также называемое угол межу браншами при полностью открытом триггере, описывает расстояние или угол между прихватом и лезвием. Например, угол между браншами при полностью открытом триггере может быть измерен с помощью визуальной системы, оптического инструмента для сравнения, протрактора и т.д. Высота подушки может описывать толщину подушки прихвата. Эти величины могут быть измерены любым подходящим способом. Например, визуальная система может быть использования для сбора изображений лезвия и получения отклонений прихвата и т.д. К тому же, различные способы нахождения механического или оптического диапазона могут быть использованы для измерения конкретных размеров. Дополнительные переменные, связанные с зажиманием, могут описывать характеристики подушки (например, подушки для скобок 58). Примерами таких параметров могут быть номер партии подушки, размеры подушки, распределение материала в подушке, твердость материала подушки, температурные свойства подушки, а также средние значения этих или подобных величин для партии изготовления.
В некоторых формах переменным, характерным для конкретной системы, присваиваются значения, основанные на измерениях, выполняемых во время испытаний. Например, некоторые входные переменные определяются во время приработки системы. Одна форма приработки описана в этом документе выше, со ссылкой на ФИГ. 26-28. Приработка оборудования может быть выполнена при известных (и повторяемых) условиях, таких как, например, использование аппарата в воздушной среде, при полном зажимании и при использовании «всухую» (например, при отсутствии материала между прихватом и лезвием). В некоторых формах наклон частоты во время приработки может служить входной переменной наряду с аналогичными величинами, такими как, например, мощность, энергия, напряжение, скорость изменения мощности (d мощность/dt); скорость изменения энергии (dEnergy/dt); скорость изменения напряжения (dV/dt); скорость изменения силы тока (dI/dt); скорость изменения частоты (df/dt); скорость изменения полного сопротивления (dZ/dt), пикового полного сопротивления и т.д. В некоторых формах во время приработки оборудования в воздушной среде (например, при зажимании лезвия в направлении подушки), переменные, описанные выше, могут оставаться относительно постоянными на протяжении процедуры приработки. Если переменные изменяются, тем не менее, наклон частоты или другая переменная может быть записана в предопределенное время после активации, усреднена или иным образом математически объединена на протяжении цикла приработки и т.д.
В некоторых формах наклон частоты или другая величина записывается в условиях приработки при мощности генератора, установленной на разные уровни мощности. Например, наклон частоты или другое измерение может быть считано, когда генератор установлен на первый уровень мощности, а второй наклон частоты или другое измерение может быть считано, когда генератор установлен на второй уровень мощности. В некоторых формах приработка может быть выполнена при размещении ткани (например, свиной ткани) или заменителя ткани (пористого материала и т.д.) между прихватом и лезвием. В некоторых формах наклон частоты и связанные переменные могут изменяться по мере рассечения заменителя ткани. Например, наклон частоты может быть считан в различных точках цикла приработки, усреднен по всему или части цикла приработки и т.д. Другой переменной, связанной с испытаниями, является количество выполняемых циклов приработки. Например, в некоторых формах может быть выполнено множество циклов приработки, например, если существует некоторая проблема с аппаратом или в процедуре испытания во время первого цикла приработки.
После выполнения приработки различные другие характеристики хирургической системы могут быть измерены (и использованы как входные переменные). Например, приработка может образовать изрезание на подушке для скобок, соответствующее лезвию. В результате анализа изрезания можно получить глубину приработки (например, глубину изрезания). Глубина может быть измерена с помощью любого подходящего устройства. В некоторых формах глубина приработки может быть измерена с помощью визуальной системы, лазерного устройства определения диапазона и/или других механических или оптических измерительных приборов. В некоторых формах глубина приработки считывается в различных точках подушки для скобок для определения распределения глубины приработки (например, профиля контакта). К тому же, в некоторых формах точка контакта прихвата может быть также определена на основании изрезания. Например, самый глубокий участок изрезания может соответствовать точке первого контакта.
Другие входные переменные, характерные для конкретной системы, по прежнему измеряются в свободном состоянии. Свободное состояние может быть воссоздано, когда прихват не контактирует с лезвием, и лезвие работает в воздушной среде. Переменными, измеряемыми в свободном состоянии, могут быть потребление мощности, полное сопротивление устройства, наклоны частоты на разных уровнях мощности, полное сопротивление лезвия на разных уровнях мощности, сила тока, напряжение и полное сопротивление рукоятки и т.д. В различных формах переменные, связанные с системой и окружающей средой, могут быть измерены в ходе предварительного прогона. Например, различные хирургические системы могут быть выполнены с возможностью необходимости предварительного испытания до эксплуатации на ткани. Такое испытание, например, может служить для гарантии того, что хирургическая система собрана правильно. Во время предварительного испытания, однако, различные значения переменных, характерных для конкретной системы, могут быть считаны, в том числе, например, напряжение, сила тока, полное сопротивление, резонансная частота и их изменения, например, как описано в этом документе.
Дополнительные переменные, характерные для конкретной системы, зависят от температурной реакции лезвия и/или прихвата. Например, температурная реакция прихвата описывает способ нагревания конкретного прихвата, когда он подвергается притоку тепла. Температура прихвата может быть измерена, например, с помощью инфракрасного термометра. Температурная реакция прихвата может быть выражена в виде количества градусов нагрева в единицах температуры на ватт притока тепла. Аналогично, кривая остывания температуры прихвата может представлять собой меру того, насколько остывает данное лезвие на воздухе при комнатной температуре за единицу времени. Аналогичные входные переменные могут быть основаны на характеристиках лезвия, в том числе, например, на температурной реакции лезвия и кривой охлаждения лезвия. Другой возможной переменной температурной реакции является изменение полного сопротивления лезвия в зависимости от температуры. Эта переменная может представлять собой меру акустического полного сопротивления лезвия (например, выраженного электрическим полным сопротивлением датчика) как функции температуры. Поскольку изменение температуры лезвия может вызвать изменение частоты, компоненты, фиксирующие лезвие и волновод внутри вала не обязательно должны располагаться конкретно в узловых точках (например, в положениях на волноводе с нулевым поперечным смещением). Таким образом, когда компоненты расположены не в конкретных узловых точках, то они могут вызывать акустическое полное сопротивление в системе в условиях воздушной среды. Измерение изменения этого сопротивления и результирующих изменений частоты позволяет моделировать не только температуру лезвия, но и насколько далеко к задней части лезвия (например, в направлении рукоятки) изменилась температура лезвия. Соответствующие температурные реакции и/или кривые охлаждения могут использоваться в качестве входных данных для нейронной сети 3150 любым подходящим способом. Например, может быть выбран наклон соответствующих кривых, значение в точке перегиба, в которой изменяется наклон или любое другое подходящее значение.
Другими возможными переменными, характерными для конкретной системы, являются срок эксплуатации производственной линии, на которой была произведена система, и поперечная частота, измеренная внутри лезвия, например, во время приработки. Например, производственное оборудование может изменяться в течение срока эксплуатации, в результате чего лезвие и другие компоненты, изготовленные в различное время на этом оборудовании, могут вести себя по-разному. Поперечные частоты описывают вибрации в лезвии, направленные ортогонально к вибрациям вала, и могут быть измерены, например, с использованием векторного анализатора сигнала или спектроанализатора, такого как Анализатор сигнала N9030A PXA, выпускаемый компанией «AGILENT TECHNOLOGIES». Поперечные частоты могут быть измерены в любых подходящих условиях, в том числе, например, при предопределенном множестве условий, таком как приработка или свободное состояние.
Различные входные переменные для нейронной сети 3150 могут находиться на рукоятке или преобразователе, используемом хирургической системой для обработки ткани. Примерами таких переменных могут быть полное сопротивление преобразователя, как описано ранее, резонансная частота рукоятки, заданное значение силы тока рукоятки и т.д. Резонансная частота рукоятки описывает резонансную частоту рукоятки, не зависящую от волновода или лезвия. Например, резонансная частота рукоятки может быть измерена на этапе изготовления. Заданное значение силы тока для рукоятки описывает уровень тока, который необходимо подать к конкретной рукоятки для обеспечения предопределенного смещения. Например, разные рукоятки могут иметь различные заданные значения силы тока в зависимости от различных допусков изготовления. Заданное значение силы тока, резонансная частота и другие переменные значения, описывающие рукоятку, могут храниться, например, в электрически стираемом программируемом постоянном запоминающем устройстве (ЭСППЗУ) или другом устройстве хранения данных, связанном с рукояткой. Например, генератор может опрашивать рукоятку, чтобы возвратить переменные, характерные для конкретной рукоятки. В некоторых формах применение переменные, характерные для конкретной рукоятки, могут обеспечить дополнительную ясность относительно различных других переменных, характерных для конкретной системы, измеренных на этапе изготовления и/или испытания. Например, когда врач использует систему, может применяться другая, часто более новая, рукоятка. Переменные, характерные для конкретной части рукоятки, позволят учитывать такие особенности.
Следует понимать, что нейронная сеть 3150 может использовать любые из входных переменных, описанных в этом документе выше. В некоторых формах нейронная сеть 3150 может быть проанализирована с помощью матричной алгебры. Например, могут использоваться четыре матрицы. Входная матрица (O_i) размером 1×I может содержать значения (например, масштабированные) для I входных нейронов. Матрица скрытых нейронов (W_ij) размером I×J содержит значения омега (ω), используемые для вычисления значений скрытых нейронов 3154. Матрица выходных нейронов омега (W_jk) размером J×K содержит значения omega (ω), используемые для вычисления выходного нейрона или выходных нейронов 3156. Постоянная матрица скрытых нейронов (O_j) размером 1×J содержит постоянные значения θ для скрытых нейронов 3154. Постоянная матрица выходных нейронов (O_k) размером 1×K содержит постоянные значения θ для выходного(-ых) нейрона(-ов) 3156. Для любого данного цикла выход нейронной сети может быть вычислен посредством анализа матриц, как указано в уравнениях (13)-(16) ниже:
x_j=O_i* W_ij+O_j (13)
Решением уравнения (13), x_j, могут быть взвешенные суммы значений входных нейронов для каждого скрытого нейрона 3154. Матрица x_j может быть проработана поэлементно с использованием уравнения, такого как уравнение (14) ниже, в результате чего будет получена матрица равного размера, O_j.
O_j=(1+exp(-x_j))^ (-1* Z) (14)
Решением уравнения (14), O_j могут быть значения для каждого из скрытых нейронов 3154. В уравнении (12), Z соответствует матрице, состоящей из единиц, с размером K×J.
x_k=O_j* W_jk+O_k (15)
Решением уравнения (15), x_k, могут быть взвешенные суммы значений скрытых нейронов для каждого выходного нейрона 3156. Матрица x_k прорабатывается поэлементно с помощью уравнения, например, уравнения (16), в результате чего будет получена матрица одинакового размера, O_k.
O_k=(1+exp(-x_k))^ (-1* Z1) (16)
Решением уравнения (16), O_k, может быть выход нейронной сети. В уравнении (15), Z1 может представлять собой матрицу, состоящую из единиц, с размером K×1.
Нейронная сеть может быть обучена любым подходящим способом. Например, в некоторых формах нейронная сеть может быть обучена с помощью способа обратного распространения. Во время обучения обратным распространением поток данных нейронной сети обращается в обратную сторону. Например, значения погрешностей в зависимости от фактической выходной мощности используются для изменения индивидуального веса и постоянных параметров. На ФИГ. 87 представлена логическая блок-схема одной формы алгоритма тренировки нейронной сети, такой как нейронная сеть 3150, использующего обратное распространение ошибки обучения. На этапе 3172 могут быть генерированы соответствующие множества данных. В некоторых формах генерируются отдельные множества данных для обучения и тестирования. Используя такие множества данных можно убедиться в том, что имеет место фактическое распознавание картин, а не только изучение сетью файлов данных, используемых для обучения. Каждое множество данных может содержать, например, все из необходимых входных данных. Каждое множество данных может также содержать фактические значения, описывающие состояние аппарата и/или ткани, соответствующее каждому множеству входных значений, которые представляют собой значение, смоделированное нейронной сетью. Например, в некоторых формах фактические значения могут содержать данные рассечения, которые могут указывать на достижение тканью порогового значения рассечения (например, 80% рассечения) при любом данном множестве входных значений. Нейронные сети, обученные таким образом, могут предоставлять выходные данные, указывающие на достижение или недостижение тканью порогового значения рассечения. Следует понимать, что может быть использовано любое подходящее значение, в том числе, например, любое другое подходящее значение рассечения, полное рассечение, уплотнение ткани и т.д. Если любой данный образец достиг 80% или любого другого подходящего порогового значения, состояние рассечения, в некоторых формах может быть определено на основании количества ткани, находящейся вдоль длины разреза, рассечение которого выполняется. Например, рассечение может не происходить сразу, но, вместо этого, может происходить от передней части к задней, от задней части к передней или из середины наружу. Если любой данный образец ткани рассечен до порогового значения, это значение может быть определено в соответствии с любым подходящим способом. Например, в некоторых формах видеокамера может заснять разрез, а пользователь может визуально определить, завершено ли рассечение до порогового значения. Также в некоторых вариантах осуществления, оптический (например, лазерный) позиционирующий датчик может использоваться для измерения положения прихвата относительно лезвия. Наклон прихвата относительно лезвия может указывать на степень рассечения.
На этапе 3174 может быть создана нейронная сеть. Например, могут быть случайным образом инициализированы значения весов и констант различных нейронов 3154, 3156 (например, с помощью функции «rand» в программе MATLAB, которая генерирует однородное распространение). В некоторых формах может быть использован диапазон значений от -2,5 до 2,5, поскольку эти значения стремится в результате дать диапазон 0-1 при обработке сигмоидальной функцией активации. На этапе 3176 сеть 3150 может быть запущена в направлении входных данных, чтобы генерировать предсказуемые выход (или выходы, если существует множество выходных узлов). На этапе 3178 может быть вычислена погрешность. Погрешность представляет собой разность между предполагаемым выходом от 3176 и фактическим значением характеристики ткани или аппарата, как описано в этом документе. В различных формах выход или выходы могут быть обозначены бинарными числами, где единица (1) соответствует существованию или истинности условия, а ноль (0) соответствует отсутствию или ложности условия. Например, если условие представляет собой 80% рассечения, выход должен составлять 1, когда ткань рассечена на 80%, и 0, когда ткань не (еще не) рассечена на 80%. В некоторых формах условие может считаться выполненным, когда выход нейронной сети 3150 превышает пороговое значение (например, 0,85).
На этапе 3180 анализируется вес каждого узла. Например, для каждого веса находится частная производная входа или погрешности (E) по весу (омега (ω)). Эта величина может быть представлена как δE/δ ωij для связей между входным слоем 3152 и скрытым слоем 3154 и как δE/δ ωjk для связей между скрытым слоем 3154 и выходным слоем 3156. На этапе 3182 анализируются константы для каждого узла. Например, для каждой константы вычисляется частная производная выхода или погрешности (E) по константе θ. Эта величина может быть представлена как δE/δ θi для связей между входным слоем 3152 и скрытым слоем 3154 и как δE/δ θj для связей между скрытым слоем 3154 и выходным слоем 3156. На этапе 3184 для каждой константы и веса может быть вычислена величина дельта. Величина дельта может быть вычислена умножением каждой частной производной на градиентную константу, η. В некоторых формах для η может быть использована величина 0,1. Затем к исходным значениям веса и константы могут быть добавлены величины дельта. Действия 3176, 3178, 3180, 3182 и 3184 могут повторяться для последующих циклов входных данных. В некоторой форме, сеть 3150, после обучения, может быть протестирована. Например, сеть 3150 может быть протестирована, как описано в этом документе, на проверочном множестве данных, которое отличается от множества данных обучения. В различных формах нейронная сеть или другая модель с несколькими переменными может быть предварительно обучена. Результирующие параметры модели (например, конфигурация сети, значения весов и констант и т.д.) могут быть определены и сохранены в генераторе и/или аппарате. Значения могут быть использованы для выполнения модели во время применения.
На ФИГ. 88 представлена логическая блок-схема одной формы алгоритма 3160 выявления множества условий для ультразвукового хирургического аппарата, использующего модель с несколькими переменными, такую как нейронная сеть 3150, описанная в этом документе. Так же как и другие управляющий алгоритмы для аппаратов, описанные в этом документе, алгоритм 3160 описан как алгоритм, выполняемый генератором, таким как генераторы 30, 50, 1002, описанные в этом документе, однако, в некоторых формах алгоритм 3160 может выполняться самим аппаратом. К тому же, хотя в этом документе описана нейронная сеть, следует понимать, что алгоритм 3160 может быть выполнен с применением любого подходящего типа модели, в том числе, например, модели генетических алгоритмов, модели классифицирующего разветвленного алгоритма, рекурсивной Байесовой модели и т.д. На этапе 3162 генератор может выполнить модель с несколькими переменными. Выполнение модели с несколькими переменными может подразумевать предоставление входных значений в модель, обработку входных значений и генерирование выхода. Например, процесс выполнения возможной нейронной сети описан в этом документе ранее в сочетании с уравнениями (11)-(14). На этапе 3164 генератор может определить, выполняется ли смоделированное множество условий. В примере, приведенном выше, такое определение может подразумевать определение того, выполнено ли рассечение на 80% (например, превысило ли значение выходного узла 3156 пороговое значение. Если нет, модель может продолжать выполняться на этапе 3162. Если да, триггерная реакция, связанная с множеством условий, может быть запущена на этапе 3166. Множество ответных действий может содержать любые подходящие действия, в том числе, например, предоставление обратной связи, указывающей на истинность множества условий, изменение сигнала управления аппаратом и т.д.
Хотя, в этом документе описаны нейронные сети, такие как сеть 3150, следует понимать, что любой другой подходящий тип модели с несколькими переменными может быть использован в дополнение или вместо нейронной сети, в том числе, например, модели генетических алгоритмов, модели классифицирующего разветвленного алгоритма, рекурсивные Байесовы модели и т.д. Например, рекурсивная Байесова модель моделирует вероятность возникновения выходного события (например, пороговое состояние рассечения), где вероятность равна нулю в начале рассечения (например, t=0) и постоянно возрастает с каждым временным шагом. Степень увеличения вероятности зависит от выполнения определенных критериев. Критерии могут представлять пороговые значения разных входных переменных. Например, если «предел наклона частоты <1» принимает значение «истина», вероятность может возрасти на определенное значение на каждом временном шаге, для которого его значение истинно. Если «предел дельты частоты <2» принимает значение «истина», вероятность может возрасти на дополнительное значение, причем сумма возрастаний, обусловленных различными критериями на каждом временном шаге, обозначает увеличение вероятности в этот момент времени. Когда вероятность достигает порогового значения (например, 0,85), рекурсивная Байесова модель может указывать на то, что смоделированное условие истинно.
Другой тип подходящей модели с несколькими переменными представляет собой дерево классификаций или решений. Дерево классификаций или решений содержит множество иерархически структурированных бинарных решений, например, в некоторых вариантах осуществления, генератор может сначала определить, меньше ли наклон частоты, характеризующий управляющий сигнал, передаваемый к хирургическому аппарату, чем пороговое значение. Если нет, изменение частоты может быть измерено по отношению ко второму значению. Если изменение частоты меньше порогового значения, генератор может предоставить обратную связь, указывающую на конец рассечения. Если изменение частоты больше порогового значения, генератор может не предоставлять обратную связь. Возвращаясь назад к исходному решению, отметим, что если наклон частоты меньше первого порогового значения, то генератор может определить, больше ли требуемое время до срабатывания, чем пороговое значение. Требуемым временем до срабатывания может называться количеств зависимости от времени, которое прошло с момента выполнения условия наклона частоты до момента, когда генератор предоставил обратную связь, указывающую на завершение рассечения. Например, этот параметр может учитывать отскок сигнала наклона частоты. Если требуемое время до срабатывания истекло, генератор предоставляет обратную связь, указывающую на завершение рассечения. Если нет, обратная связь не предоставляется.
На ФИГ. 89 представлена логическая блок-схема одной формы алгоритма 3570, использующего модель со многими переменными, такую как, например, нейронная сеть 3150 или другие модели, описанные в этом документе. Алгоритм 3570 описан как алгоритм, выполняемый генератором, таким как генераторы 30, 50, 1002, описанные в этом документе, однако, в некоторых формах алгоритм 3570 может выполняться самим аппаратом. Алгоритм 3570 содержит цепочки действий 3571, 3573, которые могут выполняться параллельно. Например, цепочка управления 3571 может содержать действия для управления ультразвуковым хирургическим аппаратом. Таким образом, цепочка управления 3571 может быть аналогична алгоритмам 3021, 3021', 3021'', 3100, 3120, описанным в этом документе. Цепочка условий 3573 может быть аналогичной алгоритмам мониторинга условий, описанным в этом документе, со ссылкой на ФИГ. 15A-15C, ФИГ. 20-22, ФИГ. 57-60 и т.д.
Обратимся сначала к первой цепочке 3571, то есть к цепочке управления, которая может быть аналогичной алгоритму 3021'', показанному на ФИГ. 77. Например, на этапе 3572, генератор может получить запрос активации, аналогичный запросу активации на этапе 3020, описанному в этом документе ранее. На этапе 3574 генератор может привести в действие концевой зажим на первом уровне мощности на протяжении первого периода времени, например, посредством передачи первого управляющего сигнала на первом уровне мощности. На этапе 3576, по истечении первого периода времени, генератор может привести в действие концевой зажим на втором уровне мощности на протяжении второго периода времени, причем второй уровень мощности меньше первого уровня мощности. Это может быть сделано, например, посредством передачи второго управляющего сигнала на втором уровне мощности. По истечении второго промежутка времени на этапе 3578 генератор может привести в действие концевой зажим на третьем уровне в течение третьего периода времени на третьей мощности, например, посредством передачи третьего управляющего сигнала на третьем уровне мощности. Третий уровень мощности может быть больше второго уровня мощности и меньше первого приводного уровня или, в некоторых формах может равняться первому уровню мощности. На этапе 3580 генератор может привести в действие концевой зажим на уровне температурного управления либо по истечении третьего периода времени, либо следуя указаниям цепочки условий 3573, как описано в этом документе. В соответствии с уровнем или стадией температурного управления, генератор может понижать мощность, подаваемую на концевой зажим, чтобы снизить скорость выделения избыточного тепла. Например, в одной форме вход в стадию температурного управления может повлечь за собой снижение мощности до уровня, равного 75% первого уровня мощности. К тому же, в некоторых формах этап или стадия температурного управления может повлечь за собой линейное и/или ступенчатое понижение мощности, подаваемой на концевой зажим.
Возвращаясь к цепочке условий 3573, отметим, что генератор может на этапе 3582 выполнить модель со многими переменными, такую как нейронная сеть 3150, описанная в этом документе, или любу другую модель со многими переменными. На этапе 3584 генератор может определить, соответствует ли выход модели предопределенному пороговому значению. Пороговое значение может указывать на истинность или существование одного или более условий смоделированного множества условий. Если нет, генератор может продолжить выполнять модель на этапе 3582. Если да, генератор может ждать в течение предупреждающего периода времени на этапе 3586. По истечении предупреждающего периода времени генератор может генерировать обратную связь (например, звуковую, визуальную или тактильную обратную связь) на этапе 3588. Обратная связь может указывать на истинность или существование выявленного условия. На этапе 3590 генератор может ждать в течение периода времени температурного управления. Во время ожидания обратная связь, инициированная на этапе 3588, может сохраняться. На этапе 3592 генератор может определить, истекли ли оба из первого и второго периодов времени (см. цепочку 3571). Если да, генератор может изменить мощность, подаваемую на концевой зажим на этапе 3596. Если нет, то в некоторых формах генератор может ждать, пока не истекут первый и второй периоды времени на этапе 3594, прежде чем изменять мощность, подаваемую на концевой зажим на этапе 3596. Например, генератор может войти на уровень или стадию температурного управления.
На ФИГ. 90 представлен график, изображающий схему управляющего сигнала 3200 одной реализации алгоритма 3170. В примере, показанном на ФИГ. 90, первый период времени представляет собой период времени, равный одной секунде, второй период времени представляет собой период времени, равный шестнадцати секундам. Первый уровень мощности составляет 100% мощности, которая доступна от генератора (например, 100% мощности доступно на уровне 5, который предоставляет генератор GEN 11 производства компании «Ethicon Endo-Surgery, Inc.», г. Цинциннати, штат Огайо). Второй уровень мощности может составлять 50% мощности, доступной от генератора. Третий уровень мощности может составлять 100% мощности, доступной от генератора.
Как показано, после активации концевой зажим может быть приведен в действие на первом уровне мощности, как указано на этапе 3572 (ФИГ. 89). Концевой зажим затем приводится в действие на втором уровне мощности в течение второго периода времени, и приводится в действие на третьем уровне мощности по истечении второго периода времени. Модель с несколькими переменными может возвращать значение, указывающее на истинность по меньшей мере одного условия из множества условий в точке, обозначенной «предел превышен» (см. 3584 на ФИГ. 89). T4, как показано на ФИГ. 90, может соответствовать предупреждающему периоду времени. По истечении предупреждающего периода времени, генератор может предоставить обратную связь, описанную выше со ссылкой на этап 3588, показанный на ФИГ. 89. T5, как показано, может соответствовать периоду времени температурного управления. По истечении этого периода времени, поскольку первый и второй периоды времени истекли (3194), генератор может изменить уровень приведения в действие концевого зажима (3196), как показано точкой, обозначенной «температурное управление активировано». Например, генератор может передать управляющий сигнал на уровне мощности, более низком или равном первому уровню мощности и более высоким, чем второй уровень мощности (например, 75% мощности, доступной от генератора).
На ФИГ. 91 представлен график, изображающий схему управляющего сигнала 3202 другой реализации алгоритма 3570. В примере, показанном на ФИГ. 91, периоды времени и уровни мощности такие же, как показанные на ФИГ. 90. После активации концевой зажим может быть приведен в действие на первом уровне мощности, как указано на этапе 3572. По истечении первого периода времени концевой зажим приводится в действие на втором уровне мощности в течение второго периода времени. На ФИГ. 91, однако, показано, что модель с несколькими переменными возвращает значение, указывающее на истинность по меньшей мере одного условия из множества условий в точке, обозначенной «предел превышен», до истечения второго периода времени, в точке, обозначенной «предел превышен». Как указано на ФИГ. 89, генератор может ждать в течение предупреждающего периода времени, а затем инициировать обратную связь, показанную на этапе 3588, в точке, обозначенной «обратная связь». По истечении периода времени температурного управления (3190) второй период все еще не истек. Таким образом, генератор ждет до конца второго периода (3194), а затем изменяет уровень приведения в действие концевого зажима, например, путем реализации возможного уровня температурного управления, равного 75% мощности, доступной от генератора.
На ФИГ. 92 представлена логическая блок-схема, изображающая одну форму алгоритма 3210, использующего модель со многими переменными для мониторинга множества условий, содержащего множественные условия. Алгоритм 3210 описан как алгоритм, выполняемый генератором, таким как один из генераторов 30, 50, 1002, описанных в этом документе, однако, в некоторых формах алгоритм 3210 может выполняться самим аппаратом. В возможной форме, показанной на ФИГ. 92, множество условий, мониторинг которого выполняет модель с несколькими переменными, содержит два условия, а именно, условие, указывающее на существование или отсутствие уплотнения ткани, и условие, указывающее на наличие или отсутствие рассечения ткани. Рассечение ткани может представлять собой полное рассечение ткани и/или частичное рассечение ткани (например, 80% рассечения, как описано в этом документе). На этапе 3212 и 3214 генератор может выполнять мониторинг значений модели, указывающих на истинность или ложность условий уплотнения ткани и рассечения ткани. В некоторых формах и условие уплотнения ткани, и условие рассечения могут отслеживаться одной и той же моделью. Например, может быть генерирована и обучена нейронная сеть 3150, описанная в этом документе, с двумя выходными узлами 3156. К тому же, в некоторых формах генератор реализует отдельные модели, то есть отличные друг от друга модели, для каждого условия.
Если условие рассечения выполняется на этапе 3216, это может означать, что рассечение произошло или начинает происходить до уплотнения. Поскольку это может быть нежелательным, генератор может деактивировать хирургический аппарат на этапе 3528, чтобы предотвратить выполнение рассечения до уплотнения. На этапе 3222 генератор может ждать первый период времени. Ожидание в течение первого периода времени, например, может позволить ткани завершить уплотнение либо до того, как произойдет рассечение, и/или до того, как врач получит сигнал о необходимости открыть концевой зажим, чтобы высвободить ткань. Первый период времени может представлять собой предопределенный период времени или, в различных формах, может быть основан на выходе условия уплотнения модели. По истечении первого периода времени генератор может предоставить обратную связь, указывающую на завершение операции уплотнения и рассечения на этапе 3224. В альтернативных вариантах, по истечении первого периода времени генератор может применять некоторое количество энергии на протяжении второго периода времени и затем, впоследствии, деактивировать аппарат и предоставить обратную связь, указывающую на завершение операции уплотнения и рассечения. Если условие рассечения не выполняется на этапе 3216, это может означать, что рассечение не началось до уплотнения. Генератор может затем определить на этапе 3220, истинно ли условие уплотнения. Если нет, генератор может вернуться к действиям мониторинга 3212, 3210. Если условие уплотнения начало выполняться, генератор может генерировать обратную связь на этапе 3224. В некоторых формах, если аппарат все еще активирован на этапе 3224, генератор может деактивировать аппарат и/или может деактивировать аппарат с отсрочкой.
Различные алгоритмы, описанные в этом документе, описаны как алгоритмы, выполняемые генератором. Следует понимать, однако, что в определенных возможных формах все или часть из этих алгоритмов могут выполняться внутренним логическим устройством 2009 хирургического аппарата (ФИГ. 16A). К тому же, различные алгоритмы, описанные в этом документе ранее, применяют различные пределы и флажки, такие как, например, пороговое полное сопротивление, время превышения полного сопротивления, пороговый параметр базового отклонения частоты, время превышения дельта частоты, флажок мониторинга нагрузки, флажок сохранения статуса и т.д. Такие пределы, флажки и т.д. могут храниться в любом подходящем месте, в том числе, например, в генераторе и/или ЭСППЗУ или в другом устройстве хранения данных, содержащемся в хирургическом аппарате.
Многофункциональные возможности многих ультразвуковых хирургических аппаратов ставят по сомнение возможность пользователя в удобном доступе и эксплуатации множественных функций и средств управления аппарата. Имеется в виду, например, возможность удобной активации браншей зажимающего механизма и активации кнопок/переключателей ручного управления, иногда выполняемых одновременно. Таким образом, различные средства управления пользовательского интерфейса могут быть желательными. Одна конструкция пользовательского интерфейса для управления функциями ультразвукового хирургического аппарата может содержать поворотный механизм между двумя частями устройства, которые требуют поворотное электрическое соединение. Поворотные электрические соединения могут со временем давать сбой, требуя дорогостоящего ремонта или замены связанных компонентов аппарата, которые в ином случае могли бы прослужить еще долгий промежуток времени. Таким образом, существует необходимость продлить срок эксплуатации различных ультразвуковых хирургических аппаратов путем предоставления альтернативных решений проблем дорогостоящего ремонта и преждевременной замены компонентов.
Ультразвуковые хирургические аппараты, в том числе и аппараты с полым сердечником, и аппараты со сплошным сердечником, используются для безопасной и эффективной обработки многих медицинских заболеваний. Ультразвуковые хирургические аппараты, и особенно ультразвуковые хирургические аппараты со сплошным сердечником, являются предпочтительными, поскольку они могут быть использованы для разреза и/или коагуляции ткани с применением энергии в форме механических вибраций, передаваемых хирургическому концевому зажиму с ультразвуковыми частотами. Ультразвуковые вибрации при их передаче ткани на подходящих уровнях энергии и с использованием подходящего концевого зажима могут применяться для разрезания, рассечения, коагуляции, подъема или отделения ткани. Ультразвуковые хирургические аппараты, в которых применяется технология сплошного сердечника, являются особенно предпочтительными, поскольку количество ультразвуковой энергии, которая может быть передана от ультразвукового преобразователя через ультразвуковой передающий волновод к хирургическому концевому зажиму. Такие аппараты могут быть использованы для открытых процедур или минимально инвазивных процедур, таких как эндоскопические или лапароскопические процедуры, в которых концевой зажим проходит сквозь троакар для того, чтобы достичь операционного поля.
Активация или возбуждение концевого зажима (например, режущего лезвия, шарикового коагулятора) такого инструмента с ультразвуковыми частотами создает продольное вибрационное движение, которое генерирует локализованное тепло внутри смежной ткани, способствуя как разрезу, так и коагуляции. Из-за природы ультразвуковых хирургических аппаратов особый концевой зажим, активируемый ультразвуком, может быть разработан для выполнения многочисленных функций, в том числе, например, разреза и коагуляции.
Ультразвуковая вибрация индуцируется в хирургическом концевом зажиме путем электрического возбуждения преобразователя, например. Преобразователь может быть изготовлен из одного или нескольких пьезоэлектрических или магнитострикционных элементов в рукоятки аппарата. Вибрации, создаваемые в секции преобразователя, передаются в хирургический концевой зажим с помощью ультразвукового волновода, проходящего из блока преобразователя к хирургическому концевому зажиму. Волноводы и концевые зажимы разработаны, чтобы резонировать на той же частоте, что и преобразователь. Когда концевой зажим присоединяется к преобразователю, общая частота системы может представлять собой ту же частоту, что и частота самого преобразователя. Преобразователь и концевой зажим могут быть разработаны, чтобы резонировать на двух разных частотах, а при их соединении или сочленении могут резонировать на разной частоте. В некоторых формах амплитуда смещения продольной ультразвуковой вибрации на кончике d концевого зажима ведет себя также, как и простая синусоида при резонансной частоте, как указано в уравнении:
d=A⋅sin(ωt) (17)
где: ω=угловая частота, в 2 раза больше, чем циклическая частота, f; а A=амплитуда смещения. Продольное смещение описывается как двойная (PTP) амплитуда, которая может быть в два раза больше амплитуды синусоиды или 2А.
Различные формы ультразвуковых хирургических аппаратов, описанных в этом документе, содержат первую конструкцию и вторую конструкцию, причем вторая структура может вращаться относительно первой конструкции. В некоторых формах, электрическая связь между первой конструкцией и второй конструкцией может обеспечиваться поворотным электрическим соединением. В одной форме первая конструкция содержит ультразвуковую рукоятку, содержащую ультразвуковой преобразователь, который во многих исполнениях, может быть использован для вращения стержня, продолжающегося в дистальном направлении от рукоятки. Вращение рукоятки может содержать вращение относительно второй конструкции, например, относительно узла рукоятки или другого компонента аппарата, в котором необходимо использовать электрическую муфту. Например, в одной форме вторая конструкция может содержать пользовательский интерфейс. В соответствии с одной формой пользовательский интерфейс может быть захвачен пользователем для того, чтобы он мог передавать команды для работы или сигналы между рукояткой, генератором энергии или другим компонентом ультразвуковой хирургической системы. В одной форме команды или сигналы, предоставляемые с помощью пользовательского интерфейса, могут быть электрически сочленены посредством поворотного электрического соединения для предоставления сигналов, которые могут быть использованы для управления или предоставления информации, связанной с эксплуатацией, связанной с ультразвуковым хирургическим аппаратом. В одной форме пользовательский интерфейс может содержать кнопки, переключатели, поворотные ручки или другие интерфейсы, известные специалистам в данной области техники. В одной форме поворотное электрическое соединение может электрически соединять концевой зажим, вращаемый относительно другого компонента аппарата, например, относительно рукоятки или узла рукоятки, чтобы обеспечить обмен данными между ними.
На ФИГ. 93-94 представлена одна форма ультразвукового хирургического аппарата 4100. Ультразвуковой хирургический аппарат 4100 может быть задействован в различных хирургических процедурах, в том числе в эндоскопических или традиционных открытых операциях. В одной форме, ультразвуковой хирургический аппарат 4100 содержит узел рукоятки 4102, узел удлиненного эндоскопического стержня 4110 и ультразвуковую рукоятку 4114, содержащую узел ультразвукового преобразователя. Узел рукоятки 4102 содержит узел срабатывания 4104, дистальный поворотный узел 4106 и узел переключателя 4108. Ультразвуковая рукоятка 4114 электрически сочленена с генератором 4116 с помощью провода 4118. Узел удлиненного эндоскопического стержня 4110 содержит узел концевого зажима 4112, который содержит элементы, предназначенные для рассечения ткани или взаимного захвата, разреза и коагуляции сосудов и/или ткани, и активирующие элементы, предназначенные для активации узла концевого зажима 4112. Хотя на ФИГ. 93-94 изображен узел концевого зажима 4112, используемый в эндоскопических хирургических процедурах, ультразвуковой хирургический аппарат 4100 может быть задействован в более традиционных открытых хирургических процедурах. Для целей настоящего описания ультразвуковой хирургический аппарат 4100 описан в рамках эндоскопического аппарата; однако, подразумевается, что открытая версия ультразвукового хирургического аппарата 4100 также может содержать такие же или подобные рабочие компоненты и элементы, как описано в этом документе. Дополнительные варианты осуществления подобных ультразвуковых хирургических аппаратов раскрыты в опубликованной заявке на патент США, принадлежащей этому же автору, №2009-0105750, текст которой во всей своей полноте включен в настоящее описание путем ссылки.
Ультразвуковой преобразователь ультразвуковой рукоятки 4114 преобразует электрический сигнал от источника энергии, такого как ультразвуковой сигнальный генератор 4116 или батарея (не показана), в механическую энергию, которая вызывает преимущественно стоящую акустическую волну продольного колебательного движения преобразователя и части лезвия 4152 узла концевого зажима 4112 на ультразвуковых частотах. Как показано на ФИГ. 94, узел рукоятки 4102 приспособлен для вкладывания ультразвуковой рукоятки 4114 в его проксимальный конец через проксимальное отверстие 4156. В одной форме, для того чтобы ультразвуковая рукоятка подавала энергию к узлу концевого зажима 4112, который может содержать прихват 4150, установленный подвижно напротив лезвия 4152, компоненты рукоятки 4114 должны быть акустически сочленены с лезвием 4152. В одной форме, например, ультразвуковая рукоятка 4114 содержит продольно выступающий присоединительный столбик, содержащий муфту волновода, показанную в виде резьбовой шпильки 4133 на ФИГ. 94, на дистальном конце рукоятки 4114, предназначенную для акустического сочленения ультразвуковой рукоятки 4114 с волноводом 4128 (см. ФИГ. 95). Ультразвуковая рукоятка 4114 может входить в зацепление с узлом удлиненного эндоскопического стержня 4110 и участками узла концевого зажима 4112. Например, как показано на ФИГ. 94, в одной форме, ультразвуковой передающий волновод 4128 содержит выступающий в продольном направлении присоединительный столбик 4129 на проксимальном конце 4131 волновода 4128, предназначенный для соединения с поверхностью 4166 ультразвуковой рукоятки 4114 с помощью резьбового соединения, такого как, шпилька 4133. То есть, ультразвуковой передающий волновод 4128 и ультразвуковая рукоятка 4114 могут механическим образом сочленяться посредством резьбового соединения между ними, чтобы вводить в зацепление с помощью резьбы и акустически сочленять ультразвуковой передающий волновод 4128 и ультразвуковая рукоятка 4114. В одной форме, когда ультразвуковая рукоятка 4114 вставляется через проксимальное отверстие 4156, ультразвуковая рукоятка 4114 может быть прикреплена к волноводу 4128 с помощью гаечного ключа. В других формах дистальная муфта волновода может быть защелкнута на проксимальном конце ультразвукового передающего волновода 4128. Ультразвуковая рукоятка 4114 также содержит дистальный кромочный участок 4158 с круговым рубчиком 4160, выполненный с возможностью входить в зацепление с рукояткой 4102 через проксимальное отверстие 4156. Как более подробно описано ниже, дистальный кромочный участок 4158 может содержать один или более электрических контактов, выполненных с возможностью электрически сочленять узел рукоятки 4102, например, чтобы получать от пользователя электрические команды управления работой через узел рукоятки 4102.
В одной форме узел рукоятки 4102 содержит триггер 4120 и неподвижную рукоятку 4122. Неподвижная рукоятка 4122 может быть интегрально связана с узлом рукоятки 4102 и триггером 4120, который может перемещаться по отношению к неподвижной рукоятке 4122. Триггер 4120 может перемещаться в направлении 4121a к неподвижной рукоятке 4122, когда пользователь прикладывает сдавливающее усилие в направлении триггера 4120. Триггер 4120 может отклоняться в направлении 4121b таким образом, что триггер 4120 вынужден переместиться в направлении 4121b, когда пользователь ослабляет сдавливающее усилие в направлении триггера 4120. Возможный триггер 4120 также содержит спусковой крючок 4124, который предоставляет дополнительную часть интерфейса, с помощью которого можно эксплуатировать триггер 4120.
На ФИГ. 95 показано поперечное сечение узла рукоятки в соответствии с различными формами. Узел рукоятки 4102 содержит триггер 4120, который может перемещаться в направлениях 4121a и 4121b относительно неподвижного триггера 4122. Триггер 4120 сочленен с рычажным механизмом для преобразования вращательного движения триггера 4120 в направлениях 4121a и 4121b в линейное движение совершающего возвратно-поступательные движения трубчатого активирующего элемента 4138 вдоль продольной оси «T». Триггер 4120 содержит первый набор фланцев 4182 с отверстиями, выполненными в них для приема пальца шарнира 4176a. Первый палец шарнира 4176a также располагается сквозь множество отверстий, выполненных в дистальном конце хомута 4174. Триггер 4120 также содержит второе множество фланцев 4180, предназначенных для приема первого конца 4176a связи 4176. По мере шарнирного поворота триггера 4120 хомут 4174 перемещается горизонтально вдоль продольной оси «T». Таким образом, как показано на ФИГ. 93, когда триггер 4120 сдавливается в направлении 4121a, совершающий возвратно-поступательное движение активирующий элемент 4138 перемещается в направлении 4146a, чтобы сомкнуть элементы браншей, содержащие прихват 4150 и лезвие 4152 узла концевого зажима 4112. После высвобождения триггер 4120 может быть отклонен, чтобы переместиться в направлении 4121B, когда сдавливающая сила перестает действовать. Таким образом, хомут 4174 и совершающий возвратно-поступательное движение активирующий элемент 4138 перемещаются в направлении 4146b, чтобы открыть бранши узла концевого зажима 4112. В некоторых вариантах осуществления пружина 5051 (ФИГ. 105) соединяет хомут 4174 и узел рукоятки 4102. Пружина 5051 отклоняет триггер 4120 в открытое положение, показанное на ФИГ. 95.
К тому же, дистальный поворотный узел 4106 может быть расположен на дистальном конце узла рукоятки 4102, когда ультразвуковая рукоятка 4114 вводится в и механически и акустически сочленяется с узлом рукоятки 4102. В одной форме, дистальный поворотный узел 4106 содержит кольцевую или кольцеобразную ручку 4134. Дистальный поворотный регулятор 4134 выполнен с возможностью механического или фрикционного соединения с частью ультразвуковой рукоятки 4114. Как описано выше, ультразвуковая рукоятка 4114 механическим образом входит в зацепление с узлом удлиненного эндоскопического стержня 4110. Таким образом, вращение поворотного регулятора 4134 вращает ультразвуковую рукоятку 4114 и узел удлиненного эндоскопического стержня 4110 в том же направлении 4170.
В различных формах ультразвуковой хирургический аппарат 4100 может содержать один или более пользовательских интерфейсов, предназначенных для передачи электрических команд управления для управления работой аппарата 4100. Например, в одной форме пользователь может использовать педальный привод 4111 для активации подачи энергии к ультразвуковой рукоятке 4114. В некоторых формах ультразвуковой хирургический аппарат 4100 содержит один или более переключателей настройки электрической мощности для активации ультразвуковой рукоятки 4114 и/или установки одной или более настроек мощности для ультразвуковой рукоятки 4114. На ФИГ. 93-95 изображены узлы рукоятки 4102, содержащие узел переключателя 4108. Узел переключателя 4108 может содержать пользовательский интерфейс, связанный с рычажным или клавишным переключателем 4132a, 4132b, например. В одной форме узел переключателя 4108 может быть по меньшей мере частично связан с узлом рукоятки 4102 и может быть реализован в виде клавишного переключателя MIN/MAX или «рычажного» переключателя. В одном положении кнопки 4132a, 4132b клавишного переключателя MIN/MAX (или «рычажного» переключателя) могут формировать легкодоступное средство активации мощности. Например, пользователь также может использовать первую выступающую ручку 4132a, чтобы установить мощность на первый уровень (например, MAX) и может использовать вторую выступающую ручку 4132b, чтобы установить мощность на второй уровень (например, MIN). Рычажный переключатель 4132a, 4132b может быть сочленен с генератором 4116 для управления работой аппарата, например активацией или подачей энергии к ультразвуковой рукоятке 4114. Таким образом, в различных формах рычажный переключатель 4132a, 4132b и генератор 4116 могут быть электрически сочленены поворотным соединением. Например, в определенных формах хирургический аппарат 4100 может содержать поворотное электрическое соединение, позволяющее выполнять операции управления мощностью, подаваемой к узлу рукоятки 4102, чтобы электрически связываться с генератором 4116 посредством ультразвуковой рукоятки 4114. Рычажный переключатель 4132a, 4132b может содержать управляющий селектор и/или активирующий переключатель, электрически сочлененный с печатной платой, например, с платой с печатной схемой, гибкой печатной платой, жестко-гибкой печатной платой или другими подходящими конфигурациями. В одной форме узел переключателя 4108 содержит рычажный переключатель, имеющий участок первого электрического контакта 4132a и второй участок электрического контакта 4132b, выполненные с возможностью модуляции настроек мощности ультразвуковой рукоятки 4114 между минимальным уровнем мощности (например, MIN) и максимальным уровнем мощности (например, MAX). Рычажный переключатель может быть электрически сочленен с рукояткой электронной схемы, которая может содержать, например, гибкую электронную схему, выполненную с возможностью электрически сочленяться с генератором 4116 посредством поворотного соединения через рукоятку 4114, чтобы управлять активацией ультразвуковой рукоятки 4114. В различных формах узел переключателя 4108 содержит один или более переключателей настройки электрической мощности для активации ультразвуковой рукоятки 4114 с целью установки одной или более настроек мощности для ультразвуковой рукоятки 4114.
Специалистам в данной области техники будет понятно, что генератор 4116 может предоставлять активирующую мощность ультразвуковой рукоятки 4114 через провод 4118, например. Как описано ранее, узел рукоятки 4102 может быть удобным для подачи электрических команд управления мощностью генератору 4116 для управления подачей энергии к ультразвуковой рукоятке 4114, например, посредством одного или более переключателей, связанных с узлом переключателя 4108. Например, при эксплуатации, один или более переключателей 4108 могут быть выполнены с возможностью электрической связи с генератором 4116 для управления подачей электрической энергии и/или рабочими элементами электрической энергии ультразвукового хирургического аппарата 4100. Следует понимать, что по меньшей мере в одной форме, генератор 4116 может быть внутренним по отношению к рукоятке 4114.
Как описано ранее, ультразвуковая рукоятка 4114 может быть выполнена с возможностью вращения относительно узла рукоятки 4102 или его компонентов с помощью дистального поворотного регулятора 4134, вращения ультразвукового передающего волновода 4128 и размещения узла концевого зажима 4112 в должной ориентации во время хирургической процедуры. Таким образом, в различных формах ультразвуковая рукоятка 4114 может быть электрически сочленена в одной или нескольких точках с управляющими операциями электрической энергии, предоставляемыми узлом рукоятки 4102. Например, в определенных формах хирургический аппарат может содержать поворотное электрическое соединение, позволяющее выполнять операции управления мощностью, подаваемой узлом рукоятки 4102, чтобы электрически связываться с генератором 4116 посредством ультразвуковой рукоятки 4114. То есть, в одной форме узел рукоятки 4102 и ультразвуковая рукоятка 4114 электрически сочленены посредством поворотного электрического соединения соединительного модуля 4190.
На ФИГ. 96 представлен соединительный модуль 4200 в соответствии с различными формами. Соединительный модуль 4200 представлен сочлененным с гибкой электронной схемой 4202 и дистальным участком 4204 рукоятки 4114, которая также показана в выноске в заштрихованном окне. Соединительный модуль 4200 содержит корпус 4206 и поворотную муфту 4208. Хотя это и не показано, соединительный модуль 4200 и ультразвуковая рукоятка 4114 могут быть расположены внутри отверстия 4156 узла рукоятки 4102 таким образом, что ультразвуковая рукоятка 4114 или волновод 4128 располагаются внутри центрального отверстия 4210, сформированного корпусом 4206 и дистальной частью 4204 рукоятки, которая таким образом вводится в и входит в зацепление с соединительным модулем 4200. Как описано ранее, ультразвуковая рукоятка 4114 может механически и акустически сочленяться с волноводом 4128, который может быть сконструирован для функционального сочленения с узлом концевого зажима 4112. Ультразвуковая рукоятка 4114 может также вращаться относительно корпуса 4206 соединительного модуля 4200, который может обеспечивать поворотное электрическое соединение между ультразвуковой рукояткой 4114 и электронной схемой управления или пользовательского интерфейса, содержащей пользовательский интерфейс, такой как узел переключателя 4108, функционально связанный с гибкой электронной схемой 4202.
В проиллюстрированной форме электронная схема управления или пользовательского интерфейса содержит гибкую электронную схему 4202. Например, поворотное электрическое соединение может содержать электрическую связь или проводящий путь, по которому электрические управляющие команды для работы или сигналы, подаваемые пользователем с помощью пользовательского интерфейса, например, через узел переключателя 4108, могут быть электрически соединены с генератором 4116, например, с помощью ультразвуковой рукоятки 4114. Таким образом, электрические управляющие команды для работы или сигналы могут быть получены генератором 4116, который может отреагировать изменением подачи энергии к ультразвуковой рукоятке 4114 для управления работой аппарата 4100. В дополнение к выше изложенному, узел переключателя 4108 может содержать или быть электрически сочлененным с гибкой электронной схемой 4202, которая в свою очередь может быть выполнена с возможностью предоставлять электро-механический интерфейс между переключателями 4132a, 4132b и генератором 4116 с помощью рукоятки 4114. Например, гибкая электронная схема 4202 может содержать одну или более точек подключения 4202a, 4202b, выполненных для механической активации посредством рычажных переключателей 4132a, 4132b. В одной форме гибкая электронная схема 4202 может содержать электрические контактные переключатели, такие как купольные переключатели, которые могут быть нажаты для обеспечения электрического сигнала к генератору 4116. Гибкая электронная схема 4202 может содержать один или более проводников, таких как проводящие магистрали, обозначенные как правило позицией 4211, которые могут обеспечиваться проводами, шинами или другими проводящими магистралями, известными специалистам в данной области техники. Проводящие магистрали могут электрически сочленяться с одним или более переключающими проводниками или кольцевыми проводниками 4212, 4214, как показано на изображении с пространственным разделением деталей соединительного модуля 4200 на ФИГ. 97. Гибкая электронная схема 4202 может сочленять круговые проводники 4212, 4214 с помощью одного или более проводящих электрических выводов 4216, 4218 или язычков соответствующих питающих круговых проводников 4212, 4214 (описанных далее). Понятно, что переключающие проводники в целом называются в настоящем документе круговыми проводниками 4212, 4214, которые формируют в общем изогнутые конструкции или корпуса, которые могут содержать один или более проводящих путей, в различных формах переключающие проводники могут содержать другие конструкции, такие как изогнутые шины, например.
Соединительный модуль 4200 содержит внешний круговой проводник 4212 и внутренний круговой проводник 4214. Внешний круговой проводник 4212 и внутренний круговой проводник 4214 формируют в общем О-образную конструкцию с открытыми концами и выполнены для относительного вращения относительно рукоятки 4114. Каждый из внешнего и внутреннего круговых проводников 4212, 4214 может далее содержать проводящее соединение, например, электрический вывод 4216, 4218, который может быть электрически сочленен с гибкой электронной схемой 4202 с помощью одного или более проводящего пути 4211, предоставляя таким образом проводящий путь к соединительному модулю 4200 для поворотной электрической связи с генератором 4116 посредством рукоятки 4114. Таким образом, может быть установлен контур управления, в котором соединительный модуль 4200 обеспечивает поворотное электрическое соединение между пользовательским интерфейсом, например, узлом переключателя 4108, и рукояткой 4114.
Со ссылкой в основном на ФИГ. 97, в различных формах один или более рычагов 4220, 4222a, 4222b могут быть расположены для того, чтобы перемещаться относительно и/или вдоль части кругового проводника 4212, 4214, содержащего проводящий путь. Например, рычаг 4220, 4222a, 4222b может быть сочленен с возможностью вращения с ультразвуковой рукояткой 4114, когда рукоятка 4114 вводится внутрь отверстия 4156, чтобы войти в зацепление с соединительным модулем 4200. Вращение ультразвуковой рукоятки 4114 в направлении 4170 (см. ФИГ. 93) может повлечь соответствующий поворот рычага 4220, 4222a, 4222b вокруг продольной оси «T» относительно соответствующего кругового проводника 4212, 4214 между первым и вторым положениями. Рычаг 4220, 4222a, 4222b может содержать один или несколько проводящих контактов 4224a, 4224b, 4226a, 4226b, расположенных для электрического сочленения с соответствующим круговым проводником 4212, 4214, когда рычаг 4220, 4222a, 4222b находится в первом положении и втором положении. Рычаг 4220, 4222a, 4222b может далее содержать одну или более соединительных контактов рукоятки 4228a, 4228b, 4230a, 4230b, выполненных с возможностью электрического сочленения с дистальной поверхностью 4232a, 4232b, 4234a, 4234b дистальной части 4204 ультразвуковой рукоятки 4114, когда рычаг 4220, 4222a, 4222b находится в первом положении и втором положении.
В дополнение к вышесказанному, в различных формах рычаги 4220, 4220a, 4220a могут поворачиваться относительно соответствующего кругового проводника 4212, 4214. Контакты кругового проводника 4224a, 4224b, 4226a, 4226b могут быть расположены таким образом, чтобы вращаться вокруг или вдоль поверхности круговых проводников 4212, 4214, когда рукоятку 4114 вращается относительно корпуса 4206. В одной форме, круговые проводники 4212, 4214 содержат изогнутые поверхности или дорожки, с которыми контакты кругового проводника 4224a, 4224b, 4226a, 4226b могут вращательно контактировать путем изогнутого элемента вращения, проходящего из или между первым положением и вторым положением. Например, в некоторых формах контакты кругового проводника 4224a, 4224b, 4226a, 4226b могут содержать прижимные контакты, выполненные для контактирования под действием давления с соответствующим круговым проводником 4212, 4214 вдоль изогнутого проводящего пути. В одной форме, один или более рычагов 4220, 4222a, 4222b содержат натяжной элемент, такой как пружинный рычаг 4236a, 4236b, 4238a, 4238b, предназначенный для сжатия или отведения одного или более контактов кругового проводника 4224a, 4224b, 4226a, 4226b в направлении кругового проводника 4212, 4214 для сохранения электрического сочленения по отношению к круговому проводнику 4212, 4214, когда рычаг 4220, 4222a, 4222b вращается относительно кругового проводника 4212, 4214. В определенных формах контакты кольцевого проводника 4224a, 4224b, 4226a, 4226b могут быть отклонены в направлении внутренней и внешней поверхности кольцевой проводник 4212, 4214 таким образом, что кольцевой проводник может электрически сочленять рычаг 4220, 4222a, 4222b с кольцевым проводником 4212, 4214 вдоль одного или более участков изогнутого движения, связанного с ультразвуковой рукояткой и/или соответствующим рычагом 4220, 4222a, 4222b. В других формах, например, рычаг 4212, 4214 может содержать контакт кольцевого проводника 4224a, 4224b, 4226a, 4226b, который может входить в зацепление с кольцевым проводником 4212, 4214 вдоль поводящего пути посредством участка, имеющего крючок или петлю, расположенного вблизи или вокруг кольцевого проводника 4212, 4214.
Со ссылкой в основном на ФИГ. 98, изображающую рабочее расположение рычагов 4220, 4222a, 4222b и соответствующего кольцевого проводника 4212, 4214, отметим, что соединительный модуль может содержать внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214. В различных формах каждый кольцевой проводник 4212, 4214 может также формировать проводящий путь вдоль изогнутого участка кольцевого проводника 4212, 4214. Может быть предоставлен внешний рычаг 4220, выполненный с возможностью вращения относительно или вокруг внешнего кольцевого проводника 4212. Внутренний рычаг 4222a, 4222b может быть аналогично выполнен с возможностью вращения относительно или вокруг внутреннего кольцевого проводника 4214. Например, внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214 могут содержать проводящие электрические выводы 4216, 4218, выполненные с возможностью электрического подключения к гибкой электронной схеме 4202 через слоты 4242, 4244, выполненные в корпусе 4206. В одной форме, проводящие электрические выводы 4216, 4218 могут по меньшей мере частично удерживать внешний кольцевой проводник 4212 и внутренний кольцевой проводник 4214, чтобы предоставить возможность относительного вращения по отношению к рычагам 4220, 4222a, 4222b. Каждый рычаг 4220, 4222a, 4222b может содержать один или несколько проводящих контактов 4224a, 4224b, 4226a, 4226b, расположенных для электрического сочленения с соответствующим кольцевым проводником 4212, 4214, когда рычаг 4220, 4222a, 4222b находится в первом положении и втором положении. Каждый рычаг 4220, 4222a может далее содержать один или более соединительных контактов рукоятки 4228a, 4228b, 4230a, 4230b, выполненных с возможностью электрического сочленения с дистальной поверхностью 4232a, 4232b, 4234a, 4234b дистальной поверхности 4204 ультразвуковой рукоятки 4114. Например, контакты кольцевого проводника 4224a, 4224b, 4226a, 4226b могут быть повернуты вокруг продольной оси между первым положением и вторым положением таким образом, что контакты кольцевого проводника 4224a, 4224b, 4226a, 4226b будут сохранять электрический контакт с соответствующим кольцевым проводником 4212, 4214 на протяжении поворота.
Внешний рычаг может содержать пару контактов кольцевого проводника 4224a, 4224b, которая может быть сочленена с пружинными рычагами 4236a, 4236b для отведения контактов 4224a, 4224b в сторону внутренней поверхности внешнего кольца 4212. В одной форме внутренний рычаг 4214 содержит пару контактов кольцевого проводника 4226a, 4226b, прикрепленную к пружинным рычагам 4238a, 4238b, сконструированным для отведения контактов 4226a, 4226b в сторону внешней поверхности внутреннего кольца 4214. Внутренний рычаг 4222a, 4222b содержит первый участок 4222a и второй участок 4222b, однако, в определенных формах внутренний рычаг 4222a, 4222b может содержать единую конструкцию. Например, внутренний рычаг 4222a, 4222b может содержать проводящую или непроводящую часть корпуса между парой контактов кольцевого проводника 4226a, 4226b.
Как описано выше, в различных формах соединительный модуль 4202 содержит один или более рычагов 4220, 4222a, 4222b, расположенных с возможностью вращения относительно узла рукоятки, корпуса 4206, пользовательского интерфейса 4108, триггера 4120 и/или проводящего пути, связанного с кольцевым проводником 4212, 4214 (см. ФИГ. 94, 98-99). В соответствии с различными формами рычаги 4220, 4222a, 4222b содержат одну или более контактов муфты рукоятки 4228a, 4228b, 4230a, 4230b, сконструированных для вхождения в зацепление и электрического сочленения с дистальной частью 4204 ультразвуковой рукоятки 4114 (ФИГ. 96). В одной форме контакты муфты рукоятки 4228a, 4228b, 4230a, 4230b могут содержать элемент зацепления, сконструированный для зацепления с дистальной частью 4204 ультразвуковой рукоятки 4114 с возможностью по меньшей мере частичного сочленения соответствующего рычага 4220, 4222a, 4222b с ультразвуковой рукояткой 4114.
В одной форме внешний рычаг 4220 содержит пару внешних контактов муфты рукоятки 4228a, 4228b, электрически сочлененных с парой контактов внешнего кольца 4224a, 4224b для предоставления электрического проводящего пути от дистальной части рукоятки до внешнего кольцевого проводника 4212. Каждая из пар контактов муфты рукоятки 4228a, 4228b сконструирована проходящей через соответствующий слот 4246a, 4246b, выполненный в поворотной муфте 4210. Далее более подробно описано, что поворотная муфта 4210 может быть выполнена с возможностью сочленения с элементом вращения ультразвуковой рукоятки 4114. Например, в различных формах поворотная муфта 4210 выполнена с возможностью предоставлять поворотную конструкцию для сочленения элемента вращения ультразвуковой рукоятки 4114 с рычагами 4220, 4222a, 4222b.
Пара контактов муфты рукоятки 4228, 4228b, изображенная на ФИГ. 98, содержит изогнутые выступы, сконструированные для зацепления и электрического сочленения с одним или более электрическими контактами, размещенными на первой дистальной поверхности 4232a, 4232b ультразвуковой рукоятки 4114. Как показано, изогнутые выступы пары внешних контактов муфты рукоятки 4228a, 4228b могут функционировать, чтобы по меньшей мере частично содействовать сочленению элемента вращения ультразвуковой рукоятки 4114, чтобы осуществить соответствующий поворот к внешнему рычагу 4220. Например, изогнутые выступы могут содержать элемент зацепления, содержащий кромку, сконструированную для фрикционного зацепления первой дистальной поверхности 4232a, 4232b или размещения внутри канавки или кромки, выполненной в первой дистальной поверхности 4232a, 4232b, для сочленения с возможностью вращения ультразвуковой рукоятки 4114 и поворотной муфты 4210. В определенных формах внешние контакты муфты рукоятки 4228a, 4228b выступают из натяжных элементов или пружинных рычагов 4248a, 4248b, выполненных с возможностью отведения или сжатия внешних контактов муфты рукоятки 4228a, 4228b в направлении от продольной оси «T» и/или к первой дистальной поверхности 4232a, 4232b. В одной форме внешний рычаг 4220 содержит один или более язычков 4250a, 4250b, например, выступов или фиксаторов, сконструированных для удержания рычага 4220. Например, первый язычок 4250a может вводиться в паз 4252, выполненный в поворотной муфте 4208, а второй язычок 4250b может защелкиваться и/или сжиматься в направлении части поворотной муфты 4208 для поддержания положения или ориентации рычага 4220 (ФИГ. 100).
В одной форме внутренний рычаг 4222a содержит пару внутренних контактов муфты рукоятки 4230a, 4230b, электрически сочлененных с парой контактов внутреннего кольца 4226a, 4226b для предоставления электрического 4222b проводящего пути от ультразвуковой рукоятки 4114 до внутреннего кольцевого проводника 4214. Каждая пара внешних контактов муфты рукоятки 4230a, 4230b сконструирована проходящей через паз 4254a, 4254b, выполненный в поворотной муфте 4210, и содержит изогнутые выступы, определяющие края, сконструированные для зацепления и электрического сочленения с одним или более электрическими контактами, размещенными на второй дистальной поверхности 4234a, 4234b дистальной части 4204 ультразвуковой рукоятки 4114. Как показано, изогнутые выступы могут служить по меньшей мере для частичного содействия в сочленении элемента вращения ультразвуковой рукоятки 4114 (ФИГ. 96) для осуществления соответствующего поворота к внутреннему рычагу 4222a, 4222b. Например, изогнутые выступы могут содержать элементы зацепления, сконструированные для фрикционного зацепления второй дистальной поверхности 4234a, 4234b или расположения внутри канавки или кромки, выполненной во второй дистальной поверхности 4234a, 4234b для сочленения с возможностью вращения ультразвуковой рукоятки 4114. В различных формах внутренние контакты муфты рукоятки 4230a, 4230b выступают из натяжных элементов, содержащих пружинные рычаги 4258a, 4258b, выполненные с возможностью отведения или сжатия контактов муфты рукоятки 4230a, 4230b в направлении от продольной оси «T» и/или ко второй дистальной поверхности 4234a, 4234b рукоятки 4114. В различных формах внутренний рычаг 4220a, 4220b далее содержит один или более язычков 4256a, 4256b для удержания рычага в требуемой ориентации. Например, внутренний рычаг 4220a, 4220b может содержать первый язычок 4256a и второй язычок 4256b. Первый и второй язычки 4256a, 4256b могут быть выполнены с возможностью ведения в паз, выполненную в поворотной муфте 4210, или защелкиваться и/или прижиматься в направлении части поворотной муфты 4210 (не показано).
В различных формах дистальная часть 4204 ультразвуковой рукоятки 4114 может содержать одну или более дистальных контактных поверхностей 4232a, 4232b, 4234a, 4234b, показанных в целом в заштрихованных выносках, показанных на ФИГ. 96. Дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b могут обеспечить электрические контакты или точки контакта, которые могут сочленяться с кольцевыми проводниками 4212, 4214 посредством рычагов 4220, 4222a, 4222b. В некоторых формах электрическое сочленение рукоятки 4114 с кольцевыми проводниками 4212, 4214 может завершающим для образования электрической цепи, содержащей электронную схему пользовательского интерфейса, например, гибкую электронную схему 4202, и генератор 4116, как описано ранее.
В одной форме рукоятка 4114 может содержать дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b, размещенные на или внутри дистальной кромки 4205, расположенной вдоль дистальной части 4204 рукоятки 4114. Дистальная кромка 4205 может образовывать одну или более канавок, обозначающих дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b, содержащие один или более электрических контактов или контактных поверхностей. Контактные поверхности могут содержать, например, позолоту или другой подходящий проводящий электрический контактный материал, известный специалистам в этой области техники. В одной форме эта дистальная кромка 4205 может образовывать продольные или круговые канавки, размеры которых позволяют дополнять или принимать контакт муфты рукоятки 4228a, 4228b, 4230a, 4230b. Например, дистальная кромка 4205 может образовывать одну или более канавок вдоль дистальных контактных поверхностей 4232a, 4232b, 4234a, 4234b, чтобы вмещать соответствующий контакт муфты рукоятки 4228a, 4228b, 4230a, 4230b таким образом, что дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b и соответствующие контакты муфты рукоятки 4228a, 4228b, 4230a, 4230b могут фрикционно, электрически и поворотно сочленяться, когда рукоятка 4114 входит в соединительный модуль 4200. В одной форме дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b и соответствующие контакты муфты рукоятки 4228a, 4228b, 4230a, 4230b могут сочленяться как система внутреннего и внешнего элемента или как система замка и ключа. В определенных формах дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b содержат одну или более круговых кромок, проходящих по внутренней окружности дистальной кромки 4205 для электрического сочленения с соответствующими контактами муфты рукоятки 4228a, 4228b, 4230a, 4230b вдоль всех или части круговых кромок. В различных формах дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b содержат позолоченные круговые электрические контакты, размещенные на круговых кромках на внутренней поверхности дистальной кромки 4205, как показано на ФИГ. 96.
Дистальные контактные поверхности 4232a, 4232b, 4234a, 4234b могут электрически сочленяться с генератором 4116 посредством электрических выводов, проходящих через рукоятку 4114, и провода 4118 для сообщения электрических сигналов управления от пользовательского интерфейса, например, узла переключателя 4108 и для управления работой ультразвукового хирургического аппарата 4100. Таким образом, в одной форме, гибкая электронная схема 4202 может быть выполнена с возможностью взаимодействия с переключателями 4132a, 4132b и предоставления электрических сигналов по проводящим магистралям 4211 к проводящим электрическим выводам 4216, 4218, которые в свою очередь предоставляют электрическое соединение рычагам 4220, 4222a, 4222b посредством кольцевых проводников 4212, 4214, которые в свою очередь электрически сочленяются через контакты муфты рукоятки 4228a, 4228b, 4230a, 4230b с дистальными контактными поверхностями 4232a, 4232b, 4234a, 4234b размещенными на дистальной части ультразвуковой рукоятки 4114 с целью обеспечения проводящего пути к генератору 4116 через ультразвуковую рукоятку 4114 и провод 4118.
В соответствии с различными формами соединительный модуль 4202 содержит шпиндель 4240. Шпиндель может проходить из корпуса 606 вдоль продольной оси «T» и может обозначать центральное отверстие 4210 вдоль продольной оси «T», размеры которого позволяют принимать длину рукоятки 4114 и/или волновода 4128. Как показано на ФИГ. 96-97, шпиндель проходит проксимально из корпуса 4206 вдоль продольной оси «T». Поворотная муфта 4208 установлена на шпинделе 4240 с возможностью поворота для вращения вокруг продольной оси «T» относительно корпуса 4206. В определенных формах шпиндель 4240 содержит одну или более удерживающих структур 4260a, 4260b, конструкция которых позволяет удерживать и, следовательно, ограничивать продольный ход поворотной муфты 4208.
На ФИГ. 99 показаны кольцевые проводники 4212, 4214, прикрепленные к или иным образом расположенные относительно корпуса 4206 таким образом, что рукоятка 4114 может поворачиваться относительно кольцевых проводников 4212, 4214. Один или более участков кольцевых проводников 4212, 4214 могут проходить сквозь паз, образованную в корпусе 4206, для обеспечения надежного крепления относительно корпуса 4206. Как описано выше, кольцевые проводники 4212, 4214 могут содержать электрические выводы 4216, 4218, проходящие сквозь пазы 4242, 4244, образованные в корпусе. Как показано на ФИГ. 97 и ФИГ. 99, внешний кольцевой проводник 4212 содержит два язычка 4262a, 4262b, размеры которых позволяют им входить в удерживающие пазы 4264a, 4264b, образованные в корпусе 4206. В различных формах кольцевые проводники 4212, 4214 и/или корпус могут содержать дополнительные позиционирующие элементы, такие как крючки, защелки, клипсы и клеящие материалы, например, которые могут применяться для расположения кольцевых проводников 4212, 4214 проксимально по отношению к корпусу 4206, чтобы обеспечить возможность относительного вращения между ультразвуковой рукояткой 4114 и кольцевыми проводниками 4212, 4214. На ФИГ. 99, внутренний кольцевой проводник 4214 содержит внутренняя окружность 4266 (см. ФИГ. 97), выполненную с возможностью входить в зацепление с поверхностью 4268, проходящей из корпуса 4206. В одной форме, внутренний кольцевой проводник 4212 может быть фрикционно сочленен с и/или приклеен с помощью клея к поверхности 4268.
На ФИГ. 100 показано перспективное изображение дистальной части поворотной муфты 4210, имеющей размещенные в ней внутренний и внешний кольцевые проводники 4212, 4214 и соответствующие внутренний и внешний рычаги 4220, 4222a, 4222b. Поворотная муфта 4210 содержит множество внутренних пазов, выполненных с возможностью вмещать и удерживать в себе внутренний и внешний рычаги 4220, 4222a, 4222b. Следует понимать, что различные формы могут содержать конфигурацию пазов, отличную от конфигурации, показанной на ФИГ. 100. Например, в различных формах поворотная муфта может содержать позиционирующие выступы для расположения рычагов. В одной форме одна или более частей рычагов 4220, 4222a, 4222b может быть приклеена к поворотной муфте клеем. В проиллюстрированной форме поворотная муфта содержит внешний паз 4270a, 4270b, 4270c для приема внешнего кольцевого проводника 4212. Внешний паз 4270a, 4270b, 4270c может иметь такие размеры, которые обеспечивают возможность относительного вращения между поворотной муфтой 4210 и внешним кольцевым проводником 4212. Поворотная муфта 4210 может далее обозначать паз 4280 для приема внешнего рычага 4220. Паз 4280 размещен лицевой стороной к продольной оси «T» (см. ФИГ. 96) по отношению к внешнему пазу 4270a, 4270b, 4270c. Паз 4280 содержит пазы для пружинных рычагов 4282a, 4282b, размеры которых позволяют принимать пружинные рычаги 4236a, 4248a и 4236b, 4248b, соответственно. Смежный с пазами для пружинных рычагов 4282a, 4282b паз 4280 определяет пазы 4284a, 4284b, размеры которых позволяют принимать контакты внешнего кольцевого проводника 4224a, 4224b, соответственно. Паз 4280 далее определяет пазы 4286a, 4286b, размеры которых позволяют принимать внешние контакты муфты рукоятки 4228a, 4228b и проходить проксимально к пазам 4246a, 4246b (паз 4246b показан на ФИГ. 96). Поворотная муфта 4210 может далее определять паз 4296b для приема внутреннего кольцевого проводника 4214 и паз 4281 для приема внутреннего рычага 4222a, 4222b. Паз 4281 расположен лицевой стороной к продольной оси «T» (см. ФИГ. 96) по отношению к пазам для пружинных рычагов 4288a, 4288b и имеет размеры, которые позволяют принимать пружинные рычаги 4238a, 4238b, соответственно. Смежно с одним концом каждого из пазов для пружинных рычагов 4288a, 4288b поворотная муфта определяет паз для внутреннего кольцевого контакта 4290a, 4290b для приема внутренних кольцевых контактов 4226a, 4226b, соответственно. Смежно с другим концом каждого из пазов для пружинных рычагов 4288a, 4288b поворотная муфта определяет пазы 4292a, 4292b, размеры которых позволяют принимать внутренние контакты муфты рукоятки 4230a, 4230b, соответственно, и которые соответственно проходят проксимально к пазам 4254a, 4254b (паз 4254b показан на ФИГ. 96).
Поворотная муфта далее обозначает отверстие 4294, размеры которого позволяют установить его вокруг шпинделя 4240. Проксимальная внутренняя круговая поверхность 4296a поворотной муфты образовывает часть отверстия 4294, которая содержит уменьшенный диаметр по сравнению с более дистальной внутренней круговой поверхностью, образовывающей паз 4296b. Уменьшенный диаметр проксимальной внутренней круговой поверхности, образовывающей паз 4296a, может сокращать вращательное трение вокруг шпинделя 4240 и может предоставлять дополнительное пространство для расположения компонентов, таких как кольцевые проводники 4212, 4214 и рычаги 4220, 4222a, 4222b, вблизи шпинделя 4240 внутри поворотной муфты 4210. Поворотная муфта 4210 далее содержит проксимальную внешнюю круговую поверхность 4298a, содержащую уменьшенный диаметр по отношению к дистальной внешней круговой поверхности 4298b. Уменьшенный диаметр дистальной внешней круговой поверхности может предоставлять дополнительное пространство для расположения компонентов, таких как кольцевые проводники 4212, 4214 и рычаги 4220, 4222a, 4222b, вблизи шпинделя 4240 внутри поворотной муфты 4210. Следует заметить, что могут быть предоставлены дополнительные кольцевые проводники и рычаги, чтобы, например, обеспечить дополнительные поворотные электрические соединения.
На ФИГ. 101-103 показан соединительный модуль 4300 в соответствии с различными формами. В одной форме соединительный модуль может быть применен в ультразвуковых хирургических аппаратах, аналогичных аппаратам, описанным выше со ссылкой на ФИГ. 96-99. Следовательно, для краткости изложения аналогичные элементы могут быть обозначены одинаковыми позициями и могут не описываться подробно повторно. Однако, следует понимать, что различные элементы могут применяться аналогичным образом и могут разделять аналогичные описания, представленные выше, со ссылкой на соединительный модуль 4190 и соединительный модуль 4200 и ультразвуковой хирургический аппарат 4100. Например, соединительный модуль 4300 может быть сочленен с электронной схемой, связанной с пользовательским интерфейсом, которая может быть аналогичной гибкой электронной схеме 4202. Соединительный модуль 4300 может быть также сочленен с дистальной частью 4304 ультразвуковой рукоятки (см. ФИГ. 93-94). Соединительный модуль 4300 содержит корпус 4306 и поворотную муфту 4308 и может размещаться внутри узла рукоятки (например, узла рукоятки 4102, показанного на ФИГ. 93-95). Как описано ранее, ультразвуковая рукоятка может механически и акустически сочленяться с волноводом, который может быть сконструирован для функционального сочленения с узлом концевого зажима. Ультразвуковая рукоятка может также поворачиваться относительно корпуса соединительного модуля 4306, который может обеспечивать поворотное электрическое соединение между ультразвуковой рукояткой и пользовательским интерфейсом. Соединительный модуль 4300 может содержать шпиндель 4340, продолжающийся в целом проксимально из корпуса 4306 вдоль продольной оси. Поворотная муфта 4308 может быть установлена на шпиндель 4340 с возможностью вращения для поворота вокруг него по отношению к корпусу 4306. Шпиндель 4340 содержит одну или более удерживающих структур 4360a, 4360b, конструкция которых позволяет удерживать и, следовательно, ограничивать продольный ход поворотной муфты 4308.
Узел переключателя 4300 содержит пару внешних контактов муфты рукоятки 4328, 4328b, содержащую прижимные контакты, конструкция которых позволяет электрически сочленяться с одним или более электрическими контактами, размещенными на первой дистальной поверхности 4332a, 4332b ультразвуковой рукоятки. Внешние контакты муфты рукоятки 4328a, 4328b могут выступать из натяжных элементов или пружинных рычагов 4348a, 4328b (см. ФИГ. 103), выполненных с возможностью отведения или сжатия внешних контактов муфты рукоятки 4328a, 4348b в направлении от продольной оси и/или к первой дистальной поверхности 4332a, 4328b. Внешние контакты муфты рукоятки 4328a, 4328b могут иметь конструкцию, позволяющую проходить сквозь паз 4346a, 4346b, соответственно, выполненный в поворотной муфте 4310, и содержать прижимные контакты, конструкция которых позволяет им электрически сочленяться с одним или более электрическими контактами, размещенными на первой дистальной поверхности 4332a, 4332b дистальной части 4304 ультразвуковой рукоятки.
В одной форме узел переключателя 4300 содержит пару внутренних контактов муфты рукоятки 4330a, 4330b, содержащую прижимные контакты, конструкция которых позволяет электрически сочленяться с одним или более электрическими контактами, размещенными на второй дистальной поверхности 4334a, 4334b ультразвуковой рукоятки. Внутренние контакты муфты рукоятки 4330a, 4330b могут выступать из натяжных элементов или пружинных рычагов 4358a, 4330b (см. ФИГ. 103), выполненных с возможностью отведения или сжатия внутренних контактов муфты 4330a, 4358b рукоятки в направлении от продольной оси и/или ко второй дистальной поверхности 4334а, 4330b Внешние контакты муфты рукоятки 4330a, 4334b могут иметь конструкцию, позволяющую проходить сквозь паз 4354b, 4354a, соответственно, выполненный в поворотной муфте 4310 и содержать прижимные контакты, конструкция которых позволяет им электрически сочленяться с одним или более электрическими контактами, размещенными на второй дистальной поверхности 4334a, 4330b дистальной части 4304 ультразвуковой рукоятки.
На ФИГ. 101-102 наиболее наглядно показано, что соединительный модуль 4300 содержит один или более зацепляющих элементов 4399a, 4399b, 4399c, 4399d, сконструированных для вхождения в зацепление с ультразвуковой рукояткой. Зацепляющие элементы 4399a, 4399b, 4399c, 4399d могут содержать один или более выступов, клипс или «захватов», образованных вблизи поворотной муфты 4310. Зацепляющие элементы 4399a, 4399b, 4399c, 4399d имеют структуру, которая позволяет входить в зацепление с поверхностью ультразвуковой рукоятки. Зацепляющие элементы могут содержать один или более податливых, эластичных, гибких полимерных материалов, размещенных на поворотной муфте. В одной форме зацепляющие элементы 4399a, 4399b, 4399c, 4399d имеют размеры, позволяющие захватывать диаметр ультразвукового хирургического аппарата. Например, зацепляющие элементы 4399a, 4399b, 4399c, 4399d могут образовывать диаметр, уменьшенный по размеру по сравнению с размером ультразвуковой рукоятки, для образования фрикционной посадки с натягом. В различных формах рукоятка может содержать дистальную часть 4304, образовывающую выступ или канавку, выполненные с возможностью принимать часть зацепляющих элементов 4399a, 4399b, 4399c, 4399d. В одной форме зацепляющий элемент 4399a, 4399b, 4399c, 4399d может быть выполнен с возможностью гнуться внутрь в направлении продольной оси для приема рукоятки, обеспечивая сжатие наружу продольной оси для сочленения с возможностью вращения с рукояткой, когда рукоятка уже введена.
На ФИГ. 103 показано перспективное изображение дистальной части поворотной муфты 4310, имеющей размещенные в ней внутренний и внешний кольцевые проводники 4312, 4314 и соответствующие внутренний и внешний рычаги 4320, 4322a, 4322b. Внутренний и внешний рычаги 4320, 4322a, 4322b имеют возможность вращения относительно внешнего кольцевого проводника 4312 и внутреннего кольцевого проводника 4314. Внешний кольцевой проводник 4312 и внутренний кольцевой проводник 4314 содержит проводящие электрические выводы 4316, 4318, выполненные с возможностью электрически соединяться с пользовательским интерфейсом через пазы, образованные в корпусе 4306, аналогичные пазам 4342, 4344. Каждый рычаг 4320, 4322a, 4322b содержит пару проводящих контактов 4324a, 4324b, 4326a, 4326b, расположенных с возможностью электрического сочленения с соответствующим кольцевым проводником 4312, 4314, когда рычаг 4320, 4322a, 4322b находится в первом положении и втором положении, и пару контактов муфты рукоятки 4328a, 4328b, 4330a, 4330b, выполненных с возможностью электрически сочленяться с дистальной поверхностью 4332a, 4332b, 4334a, 4334b дистальной части 4304 ультразвуковой рукоятки. Например, контакты кольцевого проводника 4324a, 4326b, 4326a, 4324b могут быть повернуты вокруг продольной оси между первым положением и вторым положением таким образом, что контакты кольцевого проводника 4324a, 4326b, 4326a, 4324b будут сохранять электрический контакт с соответствующим кольцевым проводником 4312, 4314 на протяжении поворота.
Внешний рычаг 4312 содержит пару контактов кольцевого проводника 4324a, 4324b, которая может быть сочленена с пружинными рычагами 4336a, 4336b для отведения контактов 4324a, 4324b в сторону внутренней поверхности внешнего кольца 4312. Пара внешних контактов муфты рукоятки 4328a, 4324b электрически сочленяется с парой контактов внешнего кольца 4324a, 4328b для предоставления электрического проводящего пути от дистальной части рукоятки 4304 до внешнего кольца. Внутренний рычаг 4314 содержит пару контактов кольцевого проводника 4326a, 4326b, электрически сочлененную с парой контактов муфты рукоятки 4320a, 4320b и прикрепленных к пружинным рычагам 4338a, 4338b, конструкция которых позволяет отводить контакты кольцевого проводника 4326a, 4326b в направлении внешней поверхности внутреннего кольца 4314. Внутренний рычаг 4322a, 4322b содержит первую часть 4322a и вторую часть 4322b.
Поворотная муфта 4310 формирует центральное отверстие 4394, образованное проксимальной поверхностью вращения 4396a и дистальным пазом 4396b. Поворотная муфта 4310 содержит множество пазов, размеры которых позволяют вмещать кольцевые проводники 4312, 4314 и соответствующие рычаги 4320, 4322a, 4322b. Конфигурация пазов, показанная на ФИГ. 103, аналогична конфигурации пазов, показанной на ФИГ. 100, и для краткости изложения не будет описана подробно. Например, поворотная муфта содержит паз 4370 для приема внешнего кольцевого проводника 4312 и паз 4396b для приема внутреннего кольцевого проводника 4314. Поворотная муфта образовывает паз 4380, размеры которого позволяют принимать внешний рычаг 4312. Поворотная муфта также образовывает паз 4388a для приема первой части внутреннего рычага 4322a и паз 4388b для приема второй части внутреннего рычага 4322b. Пазы 4346a, 4346b содержат круговое окно, лицевая сторона которого направлена от продольной оси. Пазы 4392a, 4392b образовывают комплекс обращенных наружу изогнутых канавок для вмещения внутренних контактов муфты рукоятки 4330a, 4320b.
На ФИГ. 104 и 105 показана одна форма узла рукоятки 5000, в котором применен уникальный и инновационный узел переключателя, в целом обозначаемый позицией 5020. В различных формах, узел рукоятки 5000 может быть аналогичным по конструкции и применению другим узлам рукоятки, описанным в этом документе. Таким образом, элементы, общие для этой и других конструкций узла рукоятки, описанных ранее, не будут подробно описаны кроме случаев, когда такое описание необходимо для понимания конструкции и принципа работы узла рукоятки 5000.
По меньшей мере в одной форме узел рукоятки 5000 может содержать два сегмента корпуса рукоятки, выполненных с возможностью сочленяться вместе с образованием корпуса рукоятки 5002. Например, левый сегмент корпуса рукоятки 5004 показан на ФИГ. 104, и правый сегмент корпуса рукоятки 5006 показан на ФИГ. 105. Каждый из сегментов корпуса рукоятки 5004, 5006 может быть изготовлен из пластмассы или другого полимерного материала, и сегменты могут быть сочленены вместе с помощью крепежных элементов, таких как винты, болты, защелкивающие элементы, клей и т.д. Сегменты корпуса рукоятки 5004, 5006 вместе формируют корпус рукоятки 5002, имеющий «неподвижную» рукоятку, которая может образовывать пистолетную рукоятку 5008, которую с легкостью можно захватить и которой легко манипулировать одной рукой. На ФИГ. 104 показано, что левый сегмент корпуса рукоятки 5004 может иметь такие очертания, которые позволяют установить «выемку под большой палец», которая как правило обозначена позицией 5010. Специалистам в данной области техники понятно, что когда врач захватывает пистолетную рукоятку 5008 правой рукой, например, большой палец врача может естественным образом размещаться в области выемки для большого пальца 5010. По меньшей мере в одной форме, правый сегмент корпуса рукоятки 5006 может также быть выполнен с аналогичной областью выемки для большого пальца (не показано), таким образом, чтобы если врач захватывает узел рукоятки 5000 левой рукой, большой палец врача естественным образом размещается в этой области.
Как указано ранее, узел рукоятки 5000 содержит узел переключателя 5020, который может содержать первое устройство переключения 5030 и второе устройство переключения 5060. По меньшей мере в одной форме первый переключатель 5030 содержит первый узел кнопки 5032, установленный с возможностью шарнирного перемещения относительно «передней части» 5003 корпуса рукоятки 5002. Первый узел кнопки 5032 может быть выполнен, например, из полимера или другого подходящего материала и может содержать первую кнопку 5034 и вторую кнопку 5036, соединенные между собой с помощью цапфы 5038. Цапфа 5038 служит для шарнирного закрепления первого узла кнопки 5032 на первом пальце шарнира 5040, проходящем между левым и правым сегментами корпуса 5004, 5006. Первый палец шарнира 5040 может быть выполнен литьем на одном из сегментов корпуса 5004, 5006 и может входить в соответствующее углубление (не показано), выполненное в другом сегменте корпуса 5004, 5006. Первый палец шарнира 5040 может крепиться к сегментам корпуса рукоятки 5004, 5006, также и с помощью других средств. Первый палец шарнира 5040 определяет первую ось переключателя FS-FS, относительно которой может «раскачиваться» первый узел кнопки 5032. См. ФИГ. 107. По меньшей мере в одной форме первая и вторая кнопки 5034, 5036 могут предоставляться в форме, немного напоминающей луковицу, как показано на ФИГ. 106 и 107. К тому же, чтобы еще более усовершенствовать способность врача различать первую кнопку 5034 и вторую кнопку 5036, не переводя взгляд непосредственно на кнопки 5034, 5036, одна из кнопок может иметь отличающий элемент или элементы. Например, как показано на ФИГ. 106 и 107, первая кнопка 5034 имеет множество зацепов 5042 или других образований, выполненных по ее периметру.
Как показано на ФИГ. 105, корпус переключателя 5050 установлен внутри узла рукоятки 5002 таким образом, чтобы быть расположенным проксимально по отношению к первому узлу кнопки 5032 в части узла корпуса 5002, расположенной смежно с зоной выемки для большого пальца 5010 (ФИГ. 104). В одной форме, корпус переключателя 5050 является неподвижным относительно первого узла кнопки 5032 и может быть жестко установлен на опорах или иных угловых опорных элементах, отлитых в или иным образом выполненных на сегментах корпуса рукоятки 5004, 5006. На корпусе переключателя 5050 может быть установлена печатная плата 5052, например, плата с печатной схемой, гибкая электронная схема, жестко-гибкая электронная схема или другая подходящая конфигурация, содержащая первую контактную площадку ИС 5054, соответствующую первой кнопке 5034, и вторую контактную площадку ИС 5056, соответствующую второй кнопке 5036. Специалистам в данной области техники понятно, что раскачиванием или шарнирным перемещением первого узла кнопки 5032 относительно оси первого переключателя FS-FS врач может активировать первую контактную площадку ИС 5054 путем шарнирного перемещения первой кнопки 5034 в активирующий контакт с первой контактной площадкой ИС 5054. В настоящем документе термин «активирующий контакт» может означать достаточное количество физического контакта между кнопкой и первой контактной площадкой ИС, необходимое для инициации активации контактной площадки ИС (или подобной контактной схемы). «Активирующий контакт» может также обозначать достаточное количество физической близости кнопки к контактной площадке ИС (или подобной контактно схеме), необходимое для инициации активации контактной площадки ИС, не подразумевающее фактический физический контакт какого-либо участка кнопки с контактной площадкой ИС. Врач может активировать вторую контактную площадку ИС 5056, шарнирно поворачивая вторую кнопку 5036 в активирующий контакт со второй контактной площадкой ИС 5056. Такое уникальное и инновационное первое устройство переключения может с легкостью активировать врач с помощью пальца, захватывая пистолетную часть рукоятки 5008 узла рукоятки 5000. Таким образом, каждая кнопка узла переключателя может с легкостью активироваться одной рукой, удерживающей узел рукоятки. Как и в различных формах, описанных выше, первое устройство переключения 5030 может быть применено для модуляции настроек мощности ультразвуковой рукоятки и/или для активации различных алгоритмов, описанных в этом документе.
В некоторых формах первое устройство переключения 5030 сочленено с генератором, таким как любой из генераторов 30, 500, 1002. Например, соответствующие контактные площадки ИС 5054, 5056 могут находиться в электрической связи с генератором через соединительный модуль 5057, который, в некоторых формах аналогичен соединительному модулю 4200, описанному в этом документе выше. Соединительный модуль 5057 сочленен с внутренним или внешним генератором. Сигналы, указывающие на активацию соответствующих контактных площадок ИС 5054, 5056, могут привести к тому, что генератор изменит режим работы аппарата 5000. Например, когда врач выбирает первую кнопку 5034, он может заставить генератор повысить уровень мощности, подаваемый к концевому зажиму. Например, когда врач выбирает вторую кнопку 5036, он может заставить генератор понизить уровень мощности, подаваемый к концевому зажиму. В различных вариантах осуществления, генератор может быть настроен между минимальным уровнем мощности (например, MIN) и максимальным уровнем мощности (например, MAX). Например, некоторые формы генератора GEN11, производимого компанией «Ethicon Endo-Surgery, Inc.», г. Цинциннати, штат Огайо, предоставляют пять уровней мощности. Кнопки могут использоваться для переключения генератора из одного уровня мощности на другой. К тому же, в некоторых формах одна или обе из кнопок 5034, 5036 могут быть связаны с алгоритмом, таким как алгоритмы, описанные в этом документе. Например, когда пользователь выбирает одну из кнопок 5034, генератор может выполнить алгоритм, такой как, например, один или более алгоритмов 3021, 3021', 3021'', 3120, 3170, описанных со ссылкой на ФИГ. 15A-15C, 20-22, 57-60.
В различных формах узел переключателя 5020 также содержит второе устройство переключения 5060. Как показано на ФИГ. 107-109, второе устройство переключения 5060 может содержать правую кнопку переключения 5062 и левую кнопку переключения 5066, обе из которых шарнирно прикреплены к корпусу переключателя 5050. Например, правая кнопка переключения 5062 шарнирно прикреплена к или зашплинтована к корпусу переключателя 5050 для выборочного шарнирного перемещения вокруг оси правого переключателя RS-RS, которая по существу поперечна оси первого переключателя FS-FS. См. ФИГ. 108 и 109. Аналогично, левая кнопка переключения 5066 шарнирно прикреплена к или зашплинтована к корпусу переключателя 5050 для выборочного шарнирного перемещения вокруг оси левого переключателя LS-LS. В альтернативных конструкциях, правая и левая кнопки переключения 5062, 5066 могут быть шарнирно установлены на сегментах корпуса рукоятки 5004, 5006.
По меньшей мере в одной форме правая и левая кнопки 5062 и 5066 могут иметь в целом «бочковидную» форму, что способствует простоте активации с помощью пальца. Простота активации далее улучшается стратегическим расположением правой и левой кнопки 5062, 5066 в областях канавок для большого пальца, связанных с каждым сегментом корпуса рукоятки. Например, если врач удерживает пистолетную рукоятку 5008 в правой руке, он может активировать правую кнопку переключения 5062, согнув правый большой палец вниз через правую кнопку переключения 5062 контактирующим изгибающим движением. Аналогично, если врач удерживает пистолетную рукоятку 5008 в левой руке, он может активировать левую кнопку переключения 5066, согнув левый большой палец вниз через левую кнопку переключения 5066 контактирующим изгибающим движением. Такое уникальное и инновационное устройство переключения позволяет активировать левую и правую кнопки переключения 5062, 5066, не допуская случайную активацию в результате непосредственного внутрь направленного усилия, приложенного к кнопкам переключения.
Как показано на ФИГ. 108, правая кнопка переключения 5062 имеет правый рычаг переключения 5064, выступающий из нее для активации правой контактной площадки ИС 5058, содержащей часть печатной платы 5052. Аналогично, левая кнопка переключения 5062 имеет левый рычаг переключения 5068, выступающий из нее для активации левой контактной площадки ИС 5059, содержащей часть печатной платы 5052. Таким образом, специалистам в данной области техники будет понятно, что раскачиванием или шарнирным перемещением правой кнопки переключения 5062 вокруг оси правого переключателя RS-RS врач может активировать правую контактную площадку ИС 5058, а раскачиванием или шарнирным перемещением левой кнопки переключения 5066 врач может активировать левую контактную площадку ИС 5059. Левая и правая контактные площадки ИС 5058, 5059 могут быть электрически связаны с генератором, например, через соединительный модуль 5057. Генератор может быть запрограммирован на изменение режима работы аппарата 5000 любым подходящим способом в ответ на активацию одной из кнопок переключения 5062, 5066. Например, в некоторых формах одна или обе из кнопок переключения 5062, 5066 могут быть связаны с алгоритмом, таким как алгоритмы, описанные в этом документе. Например, когда пользователь выбирает одну из кнопок 5034, генератор может выполнить алгоритм, такой как, например, один или более алгоритмов 3021, 3021', 3021'', 3120, 3170, описанных со ссылкой на ФИГ. 15A-15C, 20-22, 57-60 и т.д. В некоторых формах генератор выполнен с возможностью выполнять один и тот же алгоритм в ответ на активацию любой из кнопок переключения 5062, 5066, например, чтобы подходить и для правшей и для левшей.
На ФИГ. 109A показан узел переключателя 5020', который может содержать первое устройство переключения 5030, а также второе устройство переключения 5060'. По меньшей мере в одной форме второе устройство переключения 5060' содержит левую кнопку переключения 5066', имеющую левый шарнирный рычаг 5067, выступающий из нее. Левая кнопка переключения 5066' может быть шарнирно установлена на крепление с центральным шарниром 5007 или образования, выполненные литьем или иным способом, на левом сегменте корпуса рукоятки 5004. Левая кнопка переключения 5066' может иметь бочкообразную форму или конфигурацию и может быть выборочно шарнирно повернута вокруг оси левого переключателя LS-LS, которая может быть по существу поперечна оси первого переключателя FS-FS. Врач может избирательно шарнирно поворачивать левую кнопку переключения 5066', чтобы привести часть управляющего устройства 5069 левого рычага переключения 5067 в активирующий контакт с соответствующей левой контактной площадкой ИС 5059, установленной внутри узла рукоятки. В показанной конфигурации второе устройство переключения содержит только левую кнопку переключения 5066', как описано ранее. В альтернативных формах второе устройство переключения может содержать только правую кнопку переключения, установленную на правой стороне корпуса рукоятки, как показано на ФИГ. 109A. Другие формы второго устройства переключения могут содержать и правую, и левую кнопки переключения, установленные, как показано на ФИГ. 109A.
На ФИГ. 110 и 111 показана другая форма узла рукоятки 5100, аналогичного узлу рукоятки 5000, описанному выше, отличающегося тем, что правая и левая кнопки переключения 5162, 5166 не поворачиваются шарнирно, а вместо этого установлены в соответствующих сегментах корпуса рукоятки 5106, 5104 таким образом, что они могут быть нажаты в контакт с соответствующим правым и левым контактами (не показано). Аналогично узлу рукоятки 5000, описанному выше, правая и левая кнопки переключения 5162, 5166 расположены, однако, в областях канавки для большого пальца 5012, 5010, соответственно, как описано выше, для упрощения эксплуатации, когда врач захватывает пистолетную часть рукоятки 5108.
На ФИГ. 112 показана часть левого сегмента корпуса рукоятки 5204 другого узла рукоятки 5200, в котором его левая кнопка 5266 может быть шарнирно сочленена с корпусом переключателя 5250, как показано, и может быть выполнена со столбиком переключателя 5267, приспособленного для шарнирного перемещения в активирующий контакт с соответствующей левой контактной площадкой ИС 5059. Узел правой кнопки (не показан) узла рукоятки 5200 может иметь аналогичную конфигурацию. В альтернативных конфигурациях правая и левая кнопки могут быть шарнирно сочленены с соответствующими сегментами корпуса рукоятки.
На ФИГ. 113 и 114 показана другая форма второго устройства переключения 5360, которое может быть применено, например, в узле рукоятки 5000, описанном выше, вместо второго устройства переключения 5060. Как показано на ФИГ. 113 и 114, второе устройство переключения 5360 может содержать левую кнопку переключения 5366, имеющую левый рычаг переключения 5370, продолжающийся сбоку над и через корпус переключателя 5350, установленный внутри узла рукоятки, как было описано ранее. Левый рычаг переключения 5370 выполнен с возможностью шарнирного сочленения с правой частью или образованием 5352 корпуса переключателя 5350, расположенного смежно с правым сегментом корпуса рукоятки (не показан) узла рукоятки. Левый рычаг переключения 5370 может быть зашплинтован, например, к правой части 5352 корпуса переключателя 5350 для образования оси правого переключателя RS-RS, вокруг которой левый рычаг переключения может шарнирно поворачиваться. См. ФИГ. 113. Левый активирующий шплинт или лапка 5372 продолжается вниз от левого рычага переключения 5370 таким образом, что, когда врач раскачивает левую кнопку переключения 5366, как описано выше, левый активирующий шплинт 5372 приводится в активирующий контакт с соответствующей левой контактной площадкой ИС 5359, установленной на корпусе переключателя 5350.
Как показано на ФИГ. 113 и 114, второе устройство переключения 5360 может далее содержать правую кнопку переключения 5362, имеющую правый рычаг переключения 5380, продолжающийся сбоку над и через левый рычаг переключения 5370, чтобы шарнирно сочлениться с левой частью или образованием 5354 корпуса переключателя 5350, расположенным смежно с левым сегментом корпуса рукоятки (не показан) узла рукоятки. Правый рычаг переключения 5380 может быть зашплинтован, например, к левой части 5354 корпуса переключателя 5350 для образования оси левого переключателя LS-LS, вокруг которой правый рычаг переключения 5380 может шарнирно поворачиваться. См. ФИГ. 113. Правый активирующий шплинт или лапка 5382 продолжается вниз от правого рычага переключения 5380 через соответствующее отверстие 5374 в левом рычаге переключения 5370 таким образом, что когда врач раскачивает правую кнопку переключения 5362, как описано выше, правый активирующий шплинт 5382 приводится в активирующий контакт с соответствующей правой контактной площадкой ИС 5358, установленной на корпусе переключателя 5350. Оси правого и левого переключателей могут быть по существу параллельными друг другу, но смещены в сторону друг от друга. В конструкции узла рукоятки, содержащего первое устройство переключения 5030, каждая из осей правого и левого переключателей может быть, по существу, поперечна оси первого переключателя FS-FS первого устройства переключения. Специалистам в данной области техники очевидно, что такое устройство переключения задействует более длинные шарнирные рычаги или длины, которые в свою очередь способствуют движению кнопок, направленному по существу прямо вниз.
На ФИГ. 115 показана другая форма второго устройства переключения 5460, которая может быть применена, например, в узле рукоятки 5000, описанном выше, вместо второго устройства переключения 5060. Как видно из этой фигуры, левая и правая кнопки переключения 5566, 5562 выполнены с возможностью шарнирно сочленяться с корпусом переключателя 5450, который размещен по центру между кнопками переключения 5566, 5562 и который образовывает ось единственного переключателя SA. В конструкции узла рукоятки, содержащего первое устройство переключения 5030, ось переключателя SA может быть по существу поперечной оси первого переключателя FS-FS первого устройства переключения. Корпус переключателя 5450 может быть неподвижно установлен внутри узла корпуса рукоятки и проходить между соответствующими правым и левым сегментами корпуса рукоятки (не показано).
По меньшей мере в одной форме правая кнопка переключения 5462 имеет правый рычаг 5480, продолжающийся из нее, шарнирно сочлененный с корпусом переключателя 5450. Аналогично, левая кнопка переключения имеет левый рычаг 5470, продолжающийся из нее, шарнирно сочлененный с корпусом переключателя 5460. Правый и левый рычаги 5480, 5470 могут быть шарнирно присоединены к корпусу переключателя 5450 с помощью обычного шплинта (не показан), образовывающего ось переключателя SA, вокруг которой кнопки 5462 и 5466 могут быть шарнирно повернуты. Правый активирующий шплинт или лапка 5482 проходит внутрь от правого рычага переключения 5480 таким образом, что когда врач раскачивает или шарнирно поворачивает правую кнопку переключения 5462, как описано выше, правый активирующий шплинт 5482 приводится в активирующий контакт с соответствующей правой контактной площадкой ИС 5458, установленной на корпусе переключателя 5450. Аналогично, левый активирующий шплинт или лапка 5472 проходит внутрь от левого рычага переключения 5470 таким образом, что когда врач раскачивает или шарнирно поворачивает левую кнопку переключения 5466, как описано выше, левый активирующий шплинт 5472 приводится в активирующий контакт с соответствующей левой контактной площадкой ИС 5459, установленной на корпусе переключателя 5450. Каждый из рычагов переключения 5470 и 5480 может быть отведен в неактивированное положение соответствующими пружинами или отводящими конструкциями (не показаны), расположенными, например, между рычагом переключения 5470, 5480 и корпусом 5450.
На ФИГ. 116 показана другая форма второго устройства переключения 5560, которое может быть применено, например, в узле рукоятки 5000, описанном выше, вместо второго устройства переключения 5060. Как показано на этой фигуре, второе устройство переключения 5560 использует одно второе управляющее устройство переключения 5561, продолжающееся между правой частью корпуса рукоятки 5006 и левой частью корпуса рукоятки 5004 таким образом, что его правый конец образовывает правую кнопку переключения 5562, а его левый конец образовывает левую кнопку переключения 5566. Второе управляющее устройство переключения 5561 проходит с возможностью скольжения через соответствующие отверстия 5005 и 5007 в левом и правом сегментах корпуса рукоятки 5004, 5006 таким образом, что второе активирующее устройство 5561 может быть выборочно смещено в осевом направлении вдоль оси переключателя SA-SA. В конструкции узла рукоятки 5000, содержащего первое устройство переключения 5030, ось переключателя SA-SA может быть по существу параллельной оси первого переключателя FS-FS первого устройства переключения.
Правый отводящий элемент 5590 и левый отводящий элемент 5592 могут быть расположены внутри второго управляющего устройства переключения 5561 и могут быть выполнены с возможностью функционировать сообща с расположенной по центру частью корпуса переключателя 5550, чтобы удерживать управляющее устройство переключения 5561 размещенным в неактивированном положении, как показано на ФИГ. 116. Узел контакта переключателя 5557 может быть расположен по центру между правым элементом или выступом активирующего устройства 5563, прикрепленным или сформированным на втором активирующем устройстве 5561, и левым элементом или выступом активирующего устройства 5565, сформированным на втором активирующем устройстве 5561. Узел контакта переключателя 5557 может иметь, например, правую часть 5557R, которая соответствует правому активирующему устройству 5563 и левую часть 5557L, соответствующую левому элементу активирующего устройства 5565. Таким образом, при нажатии правой кнопки переключения 5562 внутрь, второе управляющее устройство переключения 5561 будет перемещаться в сторону в направлении влево «LD», чтобы привести правое активирующее устройство 5563 в активирующий контакт с правой частью 5557R узла контакта переключателя 5557. Аналогично, при нажатии левой кнопки переключения 5566 внутрь, второе управляющее устройство переключения 5561 будет перемещаться в сторону в направлении вправо «RD», чтобы привести левое активирующее устройство 5565 в активирующий контакт с левой частью 5557L узла контакта переключателя 5557.
На ФИГ. 117-120 в некоторой схематической форме показан узел переключателя 5620, который может быть применен в связи с различными узлами ультразвуковой и рукоятки, описанными в этом документе. По меньшей мере в одной форме узел переключателя 5620 содержит узел единственной кнопки 5632, который может быть расположен, например, где первый узел кнопки 5032 расположен в узле рукоятки 5000, как было подробнее описано выше. Например, узел кнопки 5632 может содержать рычаг каретки кнопки 5633, имеющий активирующую кнопку 5634, сформированную на ней, которая может активироваться указательным пальцем врача, когда он захватывает пистолетную часть соответствующей узла рукоятки.
По меньшей мере в одной форме рычаг каретки кнопки 5633 может содержать пару пальцев шарнира 5637, 5639, которые подвижно входят в удлиненный паз 5671 в корпусе переключателя 5670, который функционально установлен внутри корпуса рукоятки. Пальцы шарнира кнопки 5637, 5639 способствуют осевому перемещению рычага каретки кнопки 5633 (ФИГ. 118), а также вращательному движению или шарнирному повороту рычага каретки кнопки 5633 относительно корпуса переключателя 5670 (ФИГ. 119 и 120). Как показано на ФИГ. 117-120, удлиненный паз 5671 переходит в трехходовое отверстие активирующего устройства 5673, имеющее правый конец 5675, соответствующий правому переключателю 5658, левый конец 5677, соответствующий левому переключателю 5659, и центральный конец 5679, соответствующий центральному переключателю 5654. Как показано на ФИГ. 117, рычаг каретки кнопки 5633 может содержать часть управляющего устройства левого переключателя 5690, часть управляющего устройства центрального переключателя 5692 и часть управляющего устройства правого переключателя 5694. К тому же, между рычагом каретки кнопки 5633 и корпусом рукоятки 5002 могут быть предоставлены правая пружина 5680 и левая пружина 5682 для удержания рычага каретки кнопки 5633 в центральном и нейтральном положении (ФИГ. 117), когда он неактивирован.
Работа узла переключателя 5620 может быть объяснена со ссылкой на ФИГ. 118-120. На ФИГ. 118 показана активация центрального переключателя 5654с помощью нажатия активирующей кнопки 5634 внутрь, что показано стрелкой «D». По мере нажатия активирующей кнопки 5634 рычаг каретки кнопки 5633 перемещается в осевом направлении вдоль или относительно удлиненного паза 5671 в корпусе переключателя 5670, чтобы привести часть управляющего устройства центрального переключателя 5692 в активирующий контакт с центральным переключателем 5654. На ФИГ. 119 показана активация правого переключателя 5658 шарнирным поворотом активирующей кнопки 5634 в направлении, показанном стрелкой «MIN», который приводит часть управляющего устройства правого переключателя 5694 в активирующий контакт с правым переключателем 5658. На ФИГ. 120 показана активация левого переключателя 5659 шарнирным поворотом активирующей кнопки 5634 в направлении, показанном стрелкой «МАХ», который приводит часть управляющего устройства левого переключателя 5690 в активирующий контакт с левым переключателем 5659. Соответствующие переключатели 5654, 5658, 5659 могут быть электрически связаны с генератором, например, через соединительный модуль 5057, как описано в этом документе выше. Генератор может быть запрограммирован на выполнение любого подходящего действия по отношению к аппарату 500 в ответ на активацию одного из переключателей 5654, 5658, 5659. Например, в некоторых формах переключатели 5658 и 5659 выполняют функцию, подобную функции кнопок 5034, 5036 описанной выше. Например, активация одной из кнопок 5658, 5659 может заставить генератор увеличить мощность, подаваемую к концевому зажиму, в то время как активация другой кнопки 5658, 5659 может заставить генератор понизить мощность, подаваемую к концевому зажиму. К тому же, в ответ на нажатие одной или нескольких кнопок 5654, 5658, 5659 генератор может выполнить алгоритм, такой как, например, один или более алгоритмов 3021, 3021', 3021'', 3120, 3170, описанных со ссылкой на ФИГ. 15A-15C, 20-22, 57-60 и т.д.
Врачи используют ультразвуковые хирургические аппараты и системы по-разному, как описано в этом документе. Например, некоторые врачи традиционно активируют ультразвуковой хирургический аппарат, не закрывая полностью прихват в направлении лезвия. Хотя некоторые врачи уверены, что такой способ повышает производительность системы, на практике этого не происходит, и использование такого способа повышает вероятность повреждения ткани, например, из-за необходимости более длительного времени для рассечения, а иногда из-за пренебрежения рассечением и/или коагуляцией.
В различных формах с этой и другими проблемами можно справиться, оборудуя хирургический аппарат переключателем закрытия, подающем сигнал о полном закрытии прихвата. Генератор может быть выполнен с возможностью воздерживаться от активации хирургического аппарата до тех пор, пока переключатель закрытия не подаст сигнал о полном закрытии прихвата. Возвращаясь к ФИГ. 95 и 105, отметим, что некоторые формы переключателя закрытия располагаются в рукоятке 4122 (ФИГ. 95). Например, на ФИГ. 95 и 105 показан дополнительный переключатель закрытия 5900, расположенный на внутренней, проксимальной части рукоятки 4122 (ФИГ. 95) и одном или более сегментах корпуса рукоятки 5004, 5006 (ФИГ. 105).
Переключатель 5900 может быть расположен таким образом, что триггер 4124 контактирует с переключателем 5900 в его самом проксимальном положении. Например, переключатель 5900 может быть расположен на конце хода триггера 4124 (например, в направлении, указанном стрелкой 4121a на ФИГ. 93). Таким образом, триггер 4124 может контактировать с переключателем 5900, когда триггер 4124 вытянут в проксимальном направлении, чтобы закрыть прихват в направлении лезвия. В различных формах переключатель 5900 может располагаться в любом месте, где он будет активирован при закрытии концевого зажима (например, прихват поворачивается в направлении лезвия). Например, переключатель 5900 может располагаться дистально по отношению к хомуту 4174 и/или совершающему возвратно-поступательное движение активирующему элементу 4138, чтобы активироваться, когда один или другой из перечисленных компонентов перемещается в дистальном направлении, чтобы закрыть концевой зажим. Переключатель 5900 может быть электрически связан с генератором, таким как, генератор 30, 50, 1002, например, через соединительный модуль 5057 и/или 4200 рукоятку, как описано в этом документе. В различных формах генератор запрограммирован не активировать хирургический аппарат до тех пор, пока переключатель 5900 также не будет активирован. Например, если генератор получает запрос активации от одного или нескольких переключателей, описанных в этом документе, он может отреагировать на запрос активации только, если переключатель 5900 активирован, чтобы указать на закрытие прихвата.
На ФИГ. 121 показана блок-схема системы 6000, изображающая генератор 6002, сочлененный с медицинским аппаратом 6004 и электронной схемой 6006. Генератор 6002 может быть сочленен непосредственно с аппаратом 6004 или может быть сочленен с помощью кабеля 6008. Электронная схема 6006 может быть подключена к генератору 6002 для получения закодированного кадра передачи данных от схемы формирования сигналов 2002 (например, от клемм HS и SR генератора 1002 (ФИГ. 19) по паре проводящих элементов HS/SR). В различных формах генератор 6002 функционально аналогичен генератору 2002 и описан со ссылкой на ФИГ. 19. Таким образом, для краткости и ясности изложения, описание генератора 2002, 6002 в этом документе не повторяется. Однако, следует понимать, что другие генераторы могут применяться в системе 6000. К тому же, хотя некоторые аспекты раскрытых серийных протоколов могут быть описаны в этом документе ниже со ссылкой на различные электронные схемы и системы, следует понимать, что объем настоящего раскрытия стремится охватить все способы генерирования сигналов через кадр передачи данных в соответствии с циклограммами протокола, описанного со ссылкой на ФИГ. 123-128.
Закодированный кадр передачи данных, описанный подробнее далее в этом документе со ссылкой на ФИГ. 123-127, является повторяемым, двунаправленным сигналом связи, в котором закодированный кадр циклически передается генератором 6002. Кадр содержит последовательность битов, которая мгновенно кодирует информацию ввода/вывода в единственный бит модулированием как амплитуды бита, так и ширины импульса бита. Входные биты закодированы таким образом, что информация, касающаяся состояния электронной схемы 6006, передается генератору 6002 одновременно с выходными битами, в которых закодирована информация от генератора 6002, касающаяся настройки выходов электронной схемы 6006, и, следовательно, выходных состояний аппарата 6004. В различных формах, описанных в этом документе, генератор 6002 модулирует или настраивает ширину импульсов (время) для передачи информации от генератора 6002 к электронной схеме 6006 о настройке выходов электронной схемы 6006. В различных формах, описанных в этом документе, электронная схема 6006 модулирует или устанавливает высоту (амплитуду) импульсов для передачи информации о состоянии электронной схемы генератору 6002. Более того, в одной форме, электронная схема 6006 может быть излишне запитана энергией от двунаправленного сигнала связи, не содержащего другого источника энергии. В других формах электронная схема 6006 может быть запитана энергией от других источников энергии. В других формах электронная схема 6006 может быть и излишне запитана энергией от двунаправленного сигнала связи, и от источников энергии.
Аппарат 6004 содержит электронную схему 6006, которая может содержать по меньшей мере один переключатель, который в сочетании с генератором 6002 поддерживает входные сигналы активирующего переключателя и аппаратов
ЭСППЗУ. Электронная схема 6006 может располагаться внутри аппарата (как показано выше со ссылкой на каналы передачи данных 2006, 2007). В некоторых вариантах осуществления, электронная схема 6006 может располагаться на рукоятке, такой как рукоятка 1014, и может предоставлять генератору характерные для конкретной рукоятки данные, такие как, например, заданное значение силы тока, коэффициент усиления и т.д. Аппараты 6004 предоставляют различные возможности вода/вывода и могут применять множество входных данных переключения, аналоговых входных данных, а также дискретных выходных данных, аналоговых выходных данных. Для реализации функциональных возможностей множества входов и выходов переключателя, электронная схема 6006 обменивается данными с генератором 6002, используя инновационный серийный протокол передачи данных, циклограммы которого изображены со ссылкой на ФИГ. 122-127. Электронная схема 6006 выполнена с возможностью закорачивания электрических проводящих элементов HS-SR, электрически сочленяя генератор 6002 и аппарат 6004. Закорачивание линий HS-SR позволяет электронной схеме 6006 настроить начальный и конечный импульсы кадра передачи данных, которые также могут называться стартовыми/стоповыми битами. В дополнение к настройке длины кадра, закорачивание линий HS-SR позволяет генератору 6002 выполнять калибровку контура, в ходе которого генератор 6002 измеряет сопротивление контура для каждого передаваемого кадра.
Формы генератора 6002 могут обеспечить обмен данными с одной или более электронными схемами 6006, содержащимися в аппарате 6004. В определенных формах электронная схема 6006 может, как правило представлять собой любую электронную схему для передачи и/или получения данных. В одной форме, например, электронная схема 6006 может хранить информацию, касающуюся конкретного хирургического аппарата 6004, с которым она связана. Такая информация может содержать, например, номер модели, серийный номер, количество операций, в которых применялось хирургическое устройство и/или любой другой вид информации. К тому же или альтернативно, любой тип информации может быть передан электронной схеме 6006 на хранение в ней. Такая информация может содержать, например, обновленное количество операций, в которых использовалось хирургическое устройство 6004 и/или даты и/или времена его использования. В определенных формах электронная схема 6006 может передавать данные, полученные одним или несколькими датчиками (например, датчиком температуры прибора). В определенных формах электронная схема 6006 может получать данные от генератора 6002 и передавать пользователю показания (например, индикация с помощью светодиодов, индикация с помощью информации силового переключателя и звуковая и/или визуальная индикация), основанные на полученных данных.
В определенных формах электронная схема 6006 может быть выполнена таким образом, что обмен данными между аппаратом 6004 и генератором 6002 может быть активирован без необходимости предоставления дополнительных проводников, предназначенных для этой цели (например, выделенные проводники провода, соединяющего рукоятку с генератором 6002). В одной форме, например, информация может быть передана к и от электронной схемы с помощью схемы 1-проводной коммуникационной шины, реализованной в существующей проводке, такой как один из проводников, используемых для передачи опрашивающих сигналов от схемы согласования сигналов к электронной схеме 6006 в аппарате. Таким образом, изменения или модификации конструкции аппарата 6004,которые в ином случае могли бы быть необходимы, сведены к минимуму или сокращены. Более того, поскольку различные виды коммуникации могут осуществляться по одному физическому каналу (с или без разделения по диапазону частот), наличие электронной схемы 6004 может оставаться «незамеченным» генераторами, не имеющими обязательных функциональных возможностей считывания данных; таким образом, обеспечивается совместимость аппарата с более ранними версиями 6004.
Генератор 6002 может обмениваться данными с электронной схемой 6006, характерной для хирургического устройства, в которой она применяется, или с которой она может применяться, через провод 6008 и может содержать, например, номер модели, серийный номер, количество операций, в которых хирургическое устройство применялось, и/или любой другой тип информации. Информация может также быть передана от генератора 6002 к электронной схеме 6006 для хранения в ней. В одной форме, электронная схема 6006 не обязательно должна располагаться на или в аппарате 6004, но может быть размещена в переходнике для взаимодействия конкретного типа или модели аппарата 6004 с генератором 6002.
На ФИГ. 122 показана блок-схема электронной схемы 6006, расположенная внутри аппарата 6004. Электронная схема 6006 может быть подключена к генератору для получения опрашивающего сигнала по паре проводящих проводников или проводящих элементов 6010, 6012. Электронная схема 6006 может содержать множество ветвей. Первая ветвь содержит контроллер 6014, вторая ветвь содержит канал передачи данных 6016, а дополнительные ветви могут содержать дополнительные каналы передачи данных 6018 или другие электронные схемы, датчики, переключатели, индикаторы (звуковые, тактильные, визуальные). Контроллер 6014, каналы передачи данных 6018 и/или другие электронные схемы могут быть излишне запитаны энергией в битах кадра. В других формах контроллер 6014, каналы передачи данных 6018 и/или другие электронные схемы могут быть запитаны от других источников энергии. В других формах контроллер 6014, каналы передачи данных 6018 и/или другие электронные схемы могут быть излишне запитаны энергией и от двунаправленного сигнала связи и от других источников энергии.
Контроллер 6014 может представлять собой специализированную интегральную схему (ИС), микроконтроллер, содержащий процессор и запоминающее устройство, электронную схему цифровой обработки сигнала, программируемое логическое устройство, программируемую пользователем логическую матрицу, дискретную электронную схему и т.п. Контроллер содержит множество входов S0-Sn, где n- подходящее целое число. Как показано на ФИГ. 122, множество входов S0-Sn соединены с множеством переключателей SW0-SWn, где n - любое подходящее целое число. Переключатели SW0-SWn предоставляют входные данные для контроллера 6014, необходимые для управления функциями, связанными с аппаратами 6004. Контроллер 6014 передает информацию о статусах переключателей SW0-SWn генератору 6002 по серийному протоколу в соответствии настоящим раскрытием.
Контроллер 6014 также содержит множество выходов O0-Om, где m - любое подходящее целое число, и может быть таким же, как n. Выходы O0-Om приводятся в действие контроллером 6014 для управления функциями, связанными с аппаратом 6004 в соответствии с информацией, переданной генератором 6002.
В различных формах электронная схема 6006 также может содержать один или более каналов передачи данных 6016, 6018, связанных 1-проводным протоколом. В определенных формах каналы передачи данных 6016, 6018 содержат элементы хранения данных, которые могут представлять собой однопроводное шинное устройство (например, однопроводной протокол ЭСППЗУ) или другой однопроводной протокол или протокол коммутируемой локальной сети. В одной форме, например, элемент хранения данных 302 может содержать однопроводное ЭСППЗУ. Элемент хранения данных представляет собой один пример элемента электронной схемы, которая может входить в состав каналов передачи данных 6016, 6018. Канал передачи данных может дополнительно или альтернативно содержать один или более других элементов или компонентов электронной схемы, которые способны передавать и получать данные. Такие элементы или компоненты электронной схемы могут быть выполнены с возможностью, например, передачи данных, собранных одним или более датчиками (например, датчиком температуры аппарата), и/или передачи данных от генератора 6002 и предоставления оповещения пользователя (например, индикация с помощью светодиодов или другая визуальная индикация) на основании полученных данных.
В соответствии с настоящим раскрытием во время эксплуатации генератор 6002 и электронная схема 6006 обмениваются данными по надежному, гибкому, особо помехоустойчивому протоколу связи. Протокол используется на двух проводящих элементах аппарата 6010, 6012 (HS, HSR), что позволяет генератору 6002 передавать до 8 или более дискретных вводов и выводов аппарату 6004, существуя при этом в тех же линиях, что и 1-проводное ЭСППЗУ (например, каналы передачи данных 6016, 6018), и сохраняя совместимость с более ранними версиями существующих устаревших электронных схем. Протокол содержит кадр, который циклически повторяется. Кадр содержит главные импульсы (биты), например, старт/стоп, и заглавные импульсы, а также мгновенно кодируемые информационные импульсы (биты), которые кодируют и входную, и выходную информацию в единый импульс (бит) модуляцией как амплитуды, так и ширины (продолжительность импульса) каждого информационного импульса.
Одна форма такого протокола показана со ссылкой на ФИГ. 123 и 124, где ФИГ. 123 изображает циклограмму 6020 импульсов тока в кадре серийного протокола на выходе генератора 6002, а ФИГ. 124 изображает циклограмму 6022 импульсов напряжения в кадре серийного протокола на выходе электронной схемы 6014. Глядя на ФИГ. 123, описанную в сочетании с ФИГ. 122, можно отметить, что циклограмма 6020 изображает выходной сигнал от генератора 6002 к контроллеру 6014 в форме импульсов тока. Ограничение тока (барьер) может быть выбран в соответствии с конкретной комбинацией генератора 6002 и аппарата 6006. В одной форме, например, барьеры тока составляют +15 мА и -15 мА. Кадр начинается и заканчивается на возрастающих краях 6023a, 6023b старт/стоп импульсов 6024a, 6024b, генерированных контроллером 6014 путем закорачивания барьеров HS-SR. Кадр начинается на переднем фронте 6023a стартового импульса 6024a, а заканчивается на переднем фронте 6023b стопового импульса 6024b. Импульсы токового сигнала раскачиваются из отрицательного барьера -I в положительный барьер +I с пересечением нуля во время передачи стартового импульса 6024a от генератора 6002 к контроллеру 6014. После генерирования стартового импульса 6024 передаются заглавные импульсы заглавные импульсы 6026, 6028 и закодированные информационные импульсы ввода/вывода 6025. После передачи последнего закодированного информационного импульса 6025 передний фронт 6023b стопового импульса 6024b сигнализирует об окончании текущего кадра данных. Затем инициируется следующий кадр, и процесс повторяется. В одном аспекте, биты кадра, кроме старт/стоповых импульсов 6024a, 6024b, раскачиваются от 0 до отрицательного барьера -I. В других аспектах, некоторые из битов кадра вслед за стартовым импульсом 6024a раскачиваются между положительным и отрицательным барьерами +I, -I. Последний аспект обсуждается в этом документе со ссылкой на ФИГ. 128.
Информационные импульсы кадра данных одновременно кодируются и по ширине, и по амплитуде. Ширина старт/стоповых импульсов 6204a, 6024b составляет to. Импульсы тока, следующие за стартовым импульсом 6024a, являются заглавными импульсами, представляющими заглавные импульсы 6026, 6028, и также имеют ширину импульса t0. В контексте кодирования выходных импульсов, несущих информацию от генератора 6002 аппарату 6004, информационные импульсы 6025 кодируются как выходной импульс логической «1» 6030 путем увеличения импульса до ширины t1, причем выходной импульс логического «0» 6032 может иметь такую же ширину импульса t0 как и стартовый импульс 6024 и заглавные импульсы 6026, 6028. Выходной сигнал логической «1» соответствует активному статусу выхода, в котором аппарат 6004 потребляет энергию от генератора 6002. Как описано выше, кадр инициируется на переднем фронте 6023a стартового токового импульса 6024 закорачиванием первого проводящего элемента 6010 (HS) на второй проводящий элемент 6012 (SR), которые представляют собой силовую и сигнальную линии, соединяющие генератор 6002 с аппаратом 6004.
На ФИГ. 124 оказана циклограмма 6022 импульсов напряжения +/-V на уровне пересечения нуля. Циклограмма 6022 показывает информационные импульсы вода/вывода, одновременно кодируемые с помощью входной информации, поступающей от контроллера 6014 к генератору 6002 (входные данные), и выходной информации, поступающей от генератора 6002 к контроллеру 6014 (выходные данные). За исключением стартового импульса 6034a, серийная передача данных происходит между нулем и отрицательной стороной сигнала. Как показано, входной сигнал напряжения логической «1» -V1 является отрицательным, но более положительным, чем входной сигнал напряжения логического «0» -V0. Входная логическая «1» соответствует замкнутому состоянию переключателя (SW0-SWn).
Со ссылкой на циклограммы 6020, 6022, показанные на ФИГ. 123, 124, в сочетании с электронной схемой 6006, показанной на ФИГ. 122, кадр инициируется на переднем фронте 6023a стартового импульса 6034a и завершается на переднем фронте стопового импульса 6023b. Между тем, кадр содержит два заглавных импульса 6040, 6042, передаваемых после стартового импульса 6024a, и множество одновременно кодируемых информационных импульсов вода/вывода 6044. В одной форме, биты 6048 между заглавными импульсами 6042, 6042 и информационными импульсами 6044 возвращаются в ноль и имеют ширину импульса t0. В других формах, как описано в этом документе далее со ссылкой на ФИГ. 128, биты между заглавными импульсами 6042, 6042 и информационными импульсами 6044 возвращаются поочередно в любой из положительного или отрицательного барьеров. Следует понимать, что одним из преимуществ такой конфигурации является использование дополнительной избыточной энергии от кадровых сигналов для электроснабжения электронной схемы 6066.
Информационные импульсы 6044 закодированы для переноса информации как о входных, так и о выходных данных. Таким образом, каждый информационный импульс 6044 определяет первое логическое состояние, связанное с входными данными от аппарата 6004 к генератору 6002, а также второе логическое состояние, связанное с выходными данными от генератора 6002 к аппарату 6002. Одновременное кодирование сигналов вода/вывода описано более подробно со ссылкой на ФИГ. 125A-D, на которых для ясности изложения четыре логических состояния закодированного бита вода/вывода показаны отдельно.
Возвращаясь к ФИГ. 124, отметим, что заглавный импульс 6040 представляет входной логический «0», а заглавный импульс 6042 представляет входную логическую «1». Заглавные импульсы 6040, 6042 могут быть использованы генератором 6002 для определения присутствия и для идентификации типа электронной схемы 6006. Генератор 6002 может использовать считывание значений с помощью специального АЦП либо для обоих из заглавных импульсов 6040, 6042, или для стартового бита 6084 для калибровки диапазонов АЦП для входных импульсов в рамках текущего кадра данных. Генератор 6002 будет определять количество входных и выходных сигналов, использованных конкретным аппаратом 6004, путем считывания параметров ЭСППЗУ 6016, 6018.
Количество импульсов вода/вывода за кадр может быть большим из количества использованных входных сигналов и количества использованных выходных сигналов для данного аппарата 6004, или может представлять собой фиксированное число. Хотя максимальное общее количество входных и выходных сигналов является предопределенным, например 8 (всего 16), неиспользованные входные и выходные сигналы для данного аппарата 6004 могут или не могут быть реализованы или сконтактированы. Неиспользованные входные сигналы (если выходных сигналов больше, чем входных) могут быть установлены электронной схемой 6006 в логический «0». Неиспользованные выходные сигналы могут быть установлены генератором 6002 в логическое состояние «0» или «1», в зависимости от конкретного случая, для оптимизации либо скорости опроса, либо передачи энергии к электронной схеме 6006. Электронная схема 6006 будет сохранять энергию от отрицательных импульсов для энергоснабжения как собственной электронной схемы, так и любых устройств вывода (например, светодиодов, переключателей, силовых выключателей, в том числе транзисторов, устройств обратной связи, например, звуковой, визуальной, тактильной). Обмен данными с ЭСППЗУ 6016, 6018 будет происходить на положительной стороне напряжения сигнала.
Обращаясь к условным обозначениям 6054 под циклограммой 6022, можно увидеть, что каждый информационный импульс 6044 имеет два возможных входных логических состояния (входная логическая «1» и входной логический «0»), на которые указывают два отрицательных уровня напряжения -V1, -V0, и два возможных выходных логических состояния (входная логическая «1» и входной логический «0»), на которые указывают две ширины импульса t1, t0. Таким образом, когда происходит замыкание переключателя (SW0-SWn), следующий информационный импульс опускается до состояния входной логической «1»-V1, а если переключатель (SW0-SWn) остается разомкнутым, следующий информационный импульс падает до состояния логического «0»-V0. С одинаковым интервалом по времени, если аппарат 6004 потребляет энергию от генератора 6002, ширина импульса выходной логической «1» составляет t1, если аппарат 6004 не потребляет энергию от генератора 6002, ширина импульса выходного логического «0» составляет t0.
Как показано на циклограмме 6022, ширина импульса сброса 6034, заглавных импульсов 6040, 6042, выходных импульсов логического «0» и импульсов возврата в ноль 6048, каждый, имеют ширину импульсов t0. Только выходной импульс логического«1» имеет ширину импульса t1, где t0<t1. Следует понимать, что специфические µ уровни напряжения и ширины импульсов, показанные в этом документе, могут быть выбраны другими, таким образом, что -V1<-V2 и t0>t1. К тому же, импульс сброса 6034, заглавные импульсы 6040, 6042, выходные импульсы логического «0» и импульсы возврата в ноль 6048 могут иметь разную ширину импульсов.
Как показано на ФИГ. 125A-D, информационный импульс 6056 может быть закодирован в два или четыре логических состояния вода/вывода во время обмена данными между генератором 6002 и аппаратом 6004, например, электронной схемой 6006. На ФИГ. 125A, например, информационный импульс 6056A представляет собой входной логический «0» и выходной логический «0», поскольку логический уровень напряжения составляет -V0, а текущая логическая ширина импульса составляет t0. На ФИГ. 125B, например, информационный импульс 6056B представляет собой входную логическую «1» и выходной логический «0», поскольку логический уровень напряжения составляет -V1, а текущая логическая ширина импульса составляет t0. На ФИГ. 125C, например, информационный импульс 6056C представляет собой входной логический «0» и выходную логическую «1», поскольку логический уровень напряжения составляет -V0, а текущая логическая ширина импульса составляет t1. На ФИГ. 125D, например, информационный импульс 6056D представляет собой входную логическую «1» и выходной логический «0», поскольку логический уровень напряжения составляет -V1, а текущая логическая ширина импульса составляет t1.
На ФИГ. 126 изображена одна примерная циклограмма 6064 серийного протокола передачи данных. Как показано на ФИГ. 126, и со ссылкой на ФИГ. 122, циклограмма 6064 представляет сигнал связи, передаваемый по протоколу, содержащий три входных сигнала и ноль выходных сигналов. Входные сигналы, обозначенные S0, S1 и S2 на ФИГ. 22, соединены в часть контроллера 6014 электронной схемы 6006. Эти три входных сигнала могут быть связаны с состоянием переключателей SW0, SW1, SW2, подключенных к контроллеру 6014, или могут быть связаны с другими типами входных сигналов. Контроллер 6014 модулирует амплитуду соответствующего закодированного бита до -V0 или -V1, исходя из состояния (разомкнут или замкнут) переключателей SW0, SW1, SW2. Кадр данных в этом примере содержит стартовый импульс 6034a, два заглавных импульса 6040, 6042 и три информационных импульса 6058, 6060, 6062, соответствующие состояниям переключателей SW0, SW1, SW2, для всех шести импульсов. Кадр заканчивается на переднем фронте 6023b стопового импульса 6034b.
Как показано на ФИГ. 126, первый и второй информационные импульсы 6058, 6060 представляют собой входной логический «0», означающий, что входные переключатели SW0, SW1, SW2разомкнуты, а третий информационный импульс представляет собой входную логическую «1», означающую, что переключатель SW2 замкнут. Поскольку выходные сигналы отсутствуют, выходные импульсы не кодируются, таким образом, кадр данных состоит из шести импульсов, трех главных импульсов (например, импульса сброса и заглавных импульсов 6034, 6040, 6042) и трех информационных импульсов 6058, 6060, 6062. Кадр данных передается циклически для информирования генератора 6002 о состоянии входных переключателей SW0, SW1, SW2 на аппарате 6004. Когда происходит изменение состояния переключателя SW0, SW1, SW2, бит, связанный с таким переключателем автоматически кодируется, и кадр данных повторяется.
На ФИГ. 127 изображена одна примерная циклограмма 6068 серийного протокола передачи данных. Как показано на ФИГ. 127 и со ссылкой на ФИГ. 122, циклограмма 6068 представляет сигнал связи, передаваемый по протоколу, содержащий четыре входных сигнала и два выходных сигнала. Входные сигналы, обозначенные S0, S1, S2 и S3 на ФИГ. 22, соединены в часть контроллера 6014 электронной схемы 6006. Выходные сигналы связаны с O0 и O1 контроллера 6014. Эти четыре входных сигнала могут быть связаны с состоянием переключателей SW0, SW1, SW2, SW3, подключенных к контроллеру 6014, или могут быть связаны с другими типами входных сигналов. Выходные сигналы O0и O1 используются для управления различными функциями аппарата 6004, такими как, например, запуск звуковой, визуальной, тактильной обратной связи, управление мощностью, и т.д. Контроллер 6014 модулирует высоту импульса (амплитуду) соответствующих закодированных битов до -V0 или -V1, исходя из состояния (разомкнут или замкнут) переключателей SW0, SW1, SW2, SW3. Генератор 6002 модулирует ширину импульса (время) закодированного бита на основании выходной информации управления, которую генератор 6002 стремится передать контроллеру 6014. Кадр данных в этом примере содержит стартовый импульс 6034a, два заглавных импульса 6040, 6042 и четыре информационных импульса SW0, SW1, SW2, SW3, для всех семи импульсов. Кадр заканчивается на переднем фронте 6023b стопового импульса 6034b.
Как показано на ФИГ. 127, контроллер 6014 закодировал первый информационный бит 6070, содержащий как входную, так и выходную информацию. Таким образом, напряжение и ширина импульса первого информационного бита 6070 модулируются для кодирования выхода как логического «0», а входа как логической «1». Аналогично, контроллер 6014 закодировал второй информационный бит 6072, содержащий как входную, так и выходную информацию. Таким образом, напряжение и ширина импульса второго информационного бита 6072 модулируются для кодирования выхода как логической «1» и входа как логического «0». Поскольку в этом примере 4 входа и только 2 выхода, третий и четвертый биты 6074, 6076 кодируются только входной информацией, причем третий бит 6074 кодируется как входная логическая «1», а четвертый бит кодируется как входной логический «0». Кадр данных передается циклично для информирования генератора 6002 о состоянии входных переключателей SW0, SW1, SW2, SW3 на аппарате 6004, а выходы O0 и O1 приводятся в действие контроллером 6014. Когда в состоянии переключателя SW0, SW1, SW2, SW3 происходит изменение, или генератор 6002 стремится контролировать один из двух выходов O0 и O1, бит, связанные с ними, автоматически кодируются, а кадр повторяется.
На ФИГ. 128 изображены примерные циклограммы 6080, 6083 серийного протокола передачи данных. Как показано на ФИГ. 128 и 122, верхняя волновая форма представляет собой циклограмму тока 6080, произведенного генератором 6002. Токовый сигнал раскачивается от +I до -I с пересечением нуля. Эта циклограмма 6080 предоставляет мощность к электронной схеме 6014 непрерывно, за исключением времени передачи стартовых битов 6084, входной логической «1» 6086 и стопового бита 6102, описывающего состояние «ошибки отсутствуют». Нижняя волновая форма 6082 представляет собой циклограмму напряжения электронной схемы 6014. Заглавный бит 6104 начинает кадр данных, а за ним следует один стартовый бит 6084. 12 входных битов и 12 выходных битов одновременно кодируются в одном кадре данных, как описано выше, в котором входные логические биты закодированы модуляцией амплитуды импульса, а выходные логические биты закодированы модуляцией ширины импульса. Затем эти 12 информационных битов передаются для кодирования 12 входных сигналов и 12 выходных сигналов. Как показано на фигуре, входной сигнал №1 6086 кодируется как логическая «1», а выходной сигнал №1 6090 кодируется как логический «0». Входной сигнал №2 6088 кодируется как логическая «1», а выходной сигнал №2 6092 кодируется как логическая «1». Входной сигнал №3 6094 кодируется как логический «0», а выходной сигнал №3 6092 кодируется как логическая «1». Последний бит представляет входной сигнал №12 6098, закодированный как логический «0», и выходной сигнал №12, закодированный как логический «0». Как указано выше, каждый другой бит 6106 возвращает положительный барьер подачи, который предоставляет дополнительную избыточную энергию к электронной схеме 6006 аппарата 6004.
Хотя различные детали изложены в предшествующем описании, следует понимать, что различные аспекты протокола последовательной передачи данных для медицинского устройства могут на практике применяться без таких специфических деталей. Например, для краткости и ясности выбранные аспекты показаны в форме блок-схемы, а не подробного описания. Некоторые части подробных описаний, представленных в настоящем документе, могут быть представлены в виде инструкций, которые работают с данными, хранящимися в компьютерной памяти. Такие описания и представления применяются специалистами в данной области для описания и доведения сути их работы до других специалистов в данной области. Как правило, алгоритмом называют логическую последовательность этапов, приводящих к получению желаемого результата, где «этап» относится к манипулированию физическими величинами, которые могут, хотя и не обязательно, принимать форму электрических или магнитных сигналов, которые можно сохранять, передавать, комбинировать, сравнивать и которыми можно иным образом манипулировать. В распространенной практике эти сигналы называют битами, значениями, элементами, символами, знаками, терминами, числами и т.п. Эти и аналогичные термины могут быть связаны с соответствующими физическими величинами, и они являются лишь удобными метками, применяемыми в отношении этих физических величин.
Если иное конкретно не указано, как очевидно из приведенного выше описания, следует понимать, что на протяжении приведенного выше описания использование таких терминов, как «обработка», или «вычисление», или «расчет», или «определение», или «отображение» и т.п., относится к действию или процессам компьютерной системы или аналогичного электронного вычислительного устройства, которое манипулирует и преобразует данные, представленные в виде физических (электронных) величин в регистрах и памяти компьютерной системы, в другие данные, аналогичным образом представленные в виде физических величин в памяти или регистрах компьютерной системы или другом таком устройстве хранения, передачи или отображения информации.
Следует заметить, что любые ссылки, приводимые в тексте данного повествования на фразы «один аспект», «аспект», «одна форма» или «форма», означают, что конкретное свойство, структура или характеристика, описанные в связи с этим аспектом, содержится по меньшей мере в одном аспекте. Таким образом, фразы «в одном аспекте», «в аспекте», «в одной форме» или «в форме», встречающиеся в различных местах этого повествования не обязательно все относятся к одному и тому же аспекту. Более того конкретные особенности, структуры или характеристики могут быть скомбинированы любым подходящим способом в одном или более аспектах.
Некоторые аспекты могут быть описаны выражениями «сочлененный» и «соединенный», а также их производными. Следует понимать, что такие термины не являются синонимами. Например, некоторые аспекты могут описываться с использованием термина «соединенный», обозначающего, что два или более элемента находятся в непосредственном физическом или электрическом контакте друг с другом. В другом примере, некоторые аспекты могут описываться с использованием термина «сочлененный», обозначающего, что два или более элемента находятся в непосредственном физическом или электрическом контакте. Однако термин «сочлененный» также может обозначать, что два или более элемента косвенно контактируют друг с другом, но все же взаимодействуют или кооперируют свою работу друг с другом.
Следует заметить, что любые ссылки, приводимые в тексте данного повествования на фразы «один аспект», «аспект», «одна форма» или «форма», означают, что конкретное свойство, структура или характеристика, описанные в связи с этим аспектом, содержится по меньшей мере в одном аспекте. Таким образом, фразы «в одном аспекте», «в аспекте», «в одной форме» или «в форме», встречающиеся в различных местах этого повествования не обязательно все относятся к одному и тому же аспекту. Более того конкретные особенности, структуры или характеристики могут быть скомбинированы любым подходящим способом в одном или более аспектах.
Хотя в настоящем документе описаны различные формы, специалистам в данной области может быть очевидна возможность множества модификаций, вариантов, замен, изменений и эквивалентов для этих форм. Также для некоторых компонентов, для которых раскрыты материалы, могут применяться другие материалы. Таким образом, следует понимать, что представленное выше описание и приложенные пункты формулы изобретения должны охватывать все такие модификации и варианты как попадающие в рамки объема раскрытых форм. Предполагается, что следующие пункты формулы изобретения охватывают все такие модификации и варианты.
В общем смысле, специалистам в данной области техники понятно, что различные аспекты, описанные в этом документе, которые могут быть реализованы, отдельно и/или совместно, широким диапазоном аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или любой их комбинации, могут рассматриваться как аспект, составленные из различных типов «электронных схем». Следовательно, термин «электронная схема» обозначает, без ограничения, электронную схему, имеющую по меньшей мере одну дискретную электронную схему, электронную схему, имеющую по меньшей мере одну интегральную схему, электронную схему, имеющую по меньшей мере одну специализированную интегральную схему, электронную схему, образовывающую вычислительное устройство общего назначения, сконфигурированное компьютерной программой (например, компьютер общего назначения, сконфигурированный компьютерной программой, по меньшей мере частично выполняющий процессы и/или содержащий устройства, описанные в этом документе, или микропроцессор, сконфигурированный компьютерной программой, по меньшей мере частично выполняющий процессы и/или содержащий устройства, описанные в этом документе), электронную схему, образующую запоминающее устройство (например, образует оперативное запоминающее устройство), и/или электронную схему, образующую устройство обмена данными (например, модем, переключатель линий связи или оптико-электрическое оборудование). Специалистам в данной области будет понятно, что описанный в настоящем документе объект изобретения может быть реализован аналоговым или цифровым способом или в виде их некоторой комбинации.
В приведенном выше подробном описании установлены различные формы устройств и/или процессов с применением блок-схем, структурных схем и/или примеров. Поскольку такие блок-схемы, структурные схемы и/или примеры содержат одну или более функций и/или операций, специалистам в данной области будет понятно, что каждая функция и/или операция внутри таких блок-схем, структурных схем или примеров может быть реализована по отдельности и/или в совокупности широким диапазоном аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или практически любой их комбинации. В одной форме, несколько частей объекта изобретения, описанного в настоящем документе, могут быть реализованы с помощью специализированных интегральных схем (СИС), программируемых пользователем вентильных матриц (ППВМ), процессоров для обработки цифровых сигналов (DSP) или других встроенных форматов. Однако специалистам в данной области будет понятно, что некоторые аспекты раскрытых в настоящем документе форм полностью или частично могут быть эквивалентно реализованы во встроенных схемах в виде одной или более компьютерных программ, работающих на одном или более компьютерах (например, в виде одной или более программ, работающих на одной или более компьютерных системах), в виде одной или более компьютерных программ, работающих на одном или более процессорах (например, в виде одной или более программ, работающих на одном или более микропроцессорах), в виде встроенного программного обеспечения или практически в виде любой их комбинации, а разработка схемы и/или написание кода для программного обеспечения и/или встроенного программного обеспечения в свете настоящего описания будет соответствовать навыкам специалиста в данной области. В дополнение к этому специалистам в данной области будет очевидно, что механизмы описанного в настоящем документе объекта изобретения могут распространяться в виде программного продукта в различных формах и что описанная в настоящем документе иллюстративная форма объекта изобретения, описанная в настоящем документе, применяется независимо от конкретного типа среды, являющейся носителем сигнала, применяемой для действительного осуществления распространения. Примеры среды, являющейся носителем сигнала, включают в себя, без ограничений, следующие: записываемые типы носителей, такие как гибкий диск, накопитель на жестком магнитном диске, компакт-диск (CD), цифровой видеодиск (DVD), цифровая лента, компьютерная память и т.п.; и среда типа среды передачи сигнала, такая как цифровая и/или аналоговая среда связи (например, оптоволоконный кабель, волновод, проводное коммуникационное соединение, беспроводное коммуникационное соединение (например, датчик, приемник, передающая логическая схема, принимающая логическая схема и т.п.).
Все вышеупомянутые патенты США, опубликованные заявки на патент США, заявки на патент США, зарубежные патенты, зарубежные заявки на патент и публикации, не являющиеся патентами, на которые приведены ссылки в тексте настоящего документа, и/или перечисленные в перечне технических характеристик любой заявки или любом другом раскрывающем материале, включены в настоящее описание путем отсылки при условии, что они не противоречат настоящему документу. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям настоящего документа, которая была включена в указанный документ путем ссылки. Любой материал или его часть, которая включена в настоящий документ путем ссылки и которая противоречит указанным определениям, положениям или другому описанию, представленному в настоящем документе, включается в настоящий документ в той мере, в которой между включенным путем ссылки материалом и настоящим документом с описанием не возникает противоречий.
Специалисту в данной области будет понятно, что описанные в настоящем документе компоненты (например, операции), устройства, объекты и сопровождающее их описание применяются в качестве примеров ради обеспечения концептуальной ясности, и что предполагаются различные модификации конфигурации. Следовательно, при применении в настоящем документе конкретные приведенные примеры и сопроводительное описание считаются представителями их более общих классов. Как правило, применение любого конкретного примера считается представляющим его класс, а не исключение конкретных компонентов (например, операций), устройств и объектов не следует считать ограничивающими.
В отношении применения по существу любых случаев множественного и/или единственного числа для терминов в настоящем документе специалисты в данной области могут изменять множественное на единственное и/или единственное на множественное в соответствии с требованиями контекста и/или сферой применения. Различные комбинации единственного/множественного числа для ясности в настоящем документе явным образом не указаны.
Описанный в настоящем документе объект изобретения иногда иллюстрирует различные компоненты, содержащиеся внутри или соединенные с различными другими компонентами. Следует понимать, что такие показанные архитектуры являются лишь примерами и что фактически могут быть реализованы многие другие архитектуры с такой же функциональностью. В концептуальном смысле любая конфигурация компонентов для достижения такой же функциональности эффективно «связана» так, чтобы желаемая функциональность была достигнута. Таким образом, любые два компонента, скомбинированные в настоящем документе для достижения конкретной функциональности, могут рассматриваться как «связанные» друг с другом так, чтобы достигалась желаемая функциональность, независимо от архитектур или промежуточных компонентов. Аналогичным образом, любые два компонента, соединенные таким образом, можно рассматривать как «функционально соединенные» или «функционально связанные» друг с другом для достижения желаемой функциональности, а любые два компонента, которые могут быть связаны таким образом, также могут рассматриваться как «функционально соединяемые» друг с другом для достижения желаемой функциональности. Конкретные примеры функционально соединяемых компонентов включают в себя, без ограничений, физически сопрягаемые, и/или физически взаимодействующие компоненты, и/или беспроводно взаимодействующие, и/или логически взаимодействующие, и/или логически взаимодействующие компоненты.
В некоторых примерах, один или более компонентов могут быть описаны в настоящем документе как «выполненный с возможностью», «выполненный для», «функционирующий/функциональный для», «приспособленный/адаптированный», «способный», «согласующийся/соответствующий» и т.д. Специалистам в данной области техники будет понятно, что термин охватывать активные и/или неактивные компоненты и/или компоненты в режиме ожидания, если в контексте не требуется иное.
Хотя были показаны и описаны конкретные аспекты настоящего объекта изобретения, описанного в этом документе, специалистам в данной области техники будет очевидно, что на основании описанных в настоящем документе способов могут быть выполнены изменения и модификации, и такие изменения и модификации не будут являться отхождением от объекта изобретения, описанного в настоящем документе, и его расширенных аспектов, а следовательно, прилагаемые пункты формулы изобретения призваны охватить все такие изменения и модификации, которые составляют истинную сущность и объем объекта изобретения, описанного в настоящем документе. Специалистам в данной области техники будет понятно, что в общем термины, используемые в настоящем документе, и особенно в прилагаемых пунктах формулы изобретения (например, основное содержание прилагаемых пунктов формулы изобретения), как правило, подразумевают их использование в «открытом» смысле (например, термин «в том числе» должен интерпретироваться как «в том числе без ограничения», термин «имеющий» должен интерпретироваться как «имеющий по меньшей мере», термин «содержит» должен интерпретироваться как «содержит без ограничения» и т.д.). К тому же специалистам в данной области техники будет понятно, что если в конкретной мере подразумевается использование ссылки на представленный пункт формулы изобретения, то такое предназначение будет явно изложено в таком пункте формулы изобретения, а в отсутствии такой ссылки такое предназначение не подразумевается. Например, для простоты понимания, заметим, что в следующей прилагаемой формуле изобретения могут применяться вступительные фразы «по меньшей мере один» или «один и более» с целью представления изложения пункта формулы изобретения. Однако, использование таких фраз не должно означать, что представление изложения пункта формулы изобретения с использованием термина «некоторый» ограничивает любой конкретный пункт формулы изобретения, содержащий такое представление изложения пункта формулы изобретения для пунктов, содержащих только одно такое представление изложения, даже в случаях, когда один и тот же пункт содержит вводные фразы «один или более» или «по меньшей мере один» и термин «некоторый» (например, «некоторый» обычно должен быть интерпретирован как «по меньшей мере один» или «один или более»). То же самое касается использования терминов «этот» или «такой» для представления изложения пунктов формулы изобретения.
Кроме того, даже если определенное количество представленного изложения пункта формулы изобретения цитируется явно, специалистам в данной области техники будет понятно, что такое цитирование, как правило, должно быть интерпретировано в виду по меньшей мере, приведенного количества (например, простое цитирование фразы «два изложения» без других модификаторов, как правило, означает, по меньшей мере, два изложения или два или более изложений). Кроме того, в случаях использования традиционных аналогов фразы «по меньшей мере, один из A, B, C и т.д.» как правило подразумевается, что специалисты в данной области техники смогут понять традиционность аналогии (например, «система, имеющая по меньшей мере один из A, B, и C» будет содержать, без ограничения, системы, которые имеют только А, только B, только C, и B вместе, и А и С вместе, и В и С вместе и/или А, В, и С вместе и т.д.). В случаях использования традиционных аналогов фразы «по меньшей мере один из A, B или C и т.д.» как правило подразумевается, что специалисты в данной области техники смогут понять традиционность аналогии (например, «система, имеющая по меньшей мере один из A, B или C» будет содержать, без ограничения, системы, которые имеют только А, только B, только C, и B вместе, и А и С вместе, и В и С вместе и/или А, В, и С вместе и т.д.). Кроме того, специалистам в данной области техники будет понятно, что, как правило, дизъюнктивное слово и/или фраза, представляя два или более альтернативных термина, будь то в описании изобретения, формуле изобретения или на чертежах, должна быть понята, как имеющая в виду возможности включения одного из терминов, любого из терминов или обоих этих терминов, если контекст не требует иного. Например, фраза «A или B» обычно будет подразумевать включение возможностей «A» или «B» или «A и B».
В отношении приложенных пунктов формулы изобретения специалистам в данной области будет понятно, что перечисленные в них операции могут по существу выполняться в любом порядке. Также, хотя различные операционные потоки представлены в виде последовательности(-ей), следует понимать, что различные операции могут выполняться в других порядках, отличных от показанного, или же могут выполняться одновременно. Примеры таких альтернативных порядков могут включать в себя перекрывающийся, перемежающийся, прерываемый, перестраиваемый, инкрементный, предварительный, дополнительный, одновременный, обратный или другие варианты порядка, если контекст не требует иного. Более того, предполагается, что такие термины как «чувствительный к», «связанный с» или другие прилагательные прошедшего времени по существу не должны исключать таких вариантов, если контекст не требует иного.
В определенных случаях, может иметь место применение системы или способа на некоторой территории, даже если компоненты расположены вне этой территории. Например, в контексте распределенного вычисления, применение распределенной вычислительной системы может иметь место на некоторой территории, даже если части системы могут располагаться вне этой территории (например, если реле, сервер, процессор, среда передачи сигнала, передающий компьютер, приемный компьютер и т.д. расположены за пределами данной территории).
Продажа системы или способа может подобным же образом произойти на некоторой территории, даже если компоненты системы или способа расположены и/или применяются вне этой территории. Кроме того, реализация по меньшей мере части системы для выполнения способа на одной территории не исключает использование системы на другой территории.
Хотя в настоящем документе описаны различные формы, специалистам в данной области может быть очевидна возможность множества модификаций, вариантов, замен, изменений и эквивалентов для этих форм. Также для некоторых компонентов, для которых раскрыты материалы, могут применяться другие материалы. Таким образом, следует понимать, что представленное выше описание и приложенные пункты формулы изобретения должны охватывать все такие модификации и варианты как попадающие в рамки объема раскрытых форм. Предполагается, что следующие пункты формулы изобретения охватывают все такие модификации и варианты.
В целом использование описанных в настоящем документе принципов настоящего изобретения обеспечивает получение множества преимуществ. Представленное выше описание одной или более форм было представлено для целей иллюстрации и описания. Считается, что описание не является исчерпывающим или ограничивающим точной раскрытой формой. В свете вышеуказанных идей возможны модификации или варианты. Одна или более форм были выбраны и описаны для иллюстрации принципов и способов практической реализации, посредством чего позволяя специалисту в данной области использовать различные формы изобретения, а также с различными модификациями, соответствующими конкретной предполагаемой сфере применения. Предполагается, что полный объем определен в приложенных пунктах формулы изобретения.
ПРИМЕРЫ
В одном общем аспекте хирургический аппарат в сборе, осуществляющий принципы описанных форм, выполнен с возможностью позволять выполнять избирательное рассечение, разрез, коагуляцию и захват ткани во время хирургических процедур. Генератор может генерировать по меньшей мере один электрический сигнал, который можно отслеживать по отношению к первому множеству логических условий. Если выполняется первое множество логических условий, может быть запущен первый ответ генератора.
В определенных формах выполняется мониторинг ультразвукового полного сопротивления хирургического аппарата. Если ультразвуковое полное сопротивление хирургического аппарата превышает пороговое полное сопротивление, резонансная частота по меньшей мере одного электрического сигнала может быть сохранена в качестве базовой частоты. К тому же, первый ответ генератора может быть запущен, либо если выполняется первое множество логических условий, либо если резонансная частота по меньшей мере одного электрического сигнала отличается от базовой частоты на базовое пороговое отклонение.
В определенных формах может выполняться мониторинг событий нагружения концевого зажима хирургического аппарата. Первый ответ генератора может быть запущен, когда выполняется первое множество логических условий, и когда обнаружено событие нагружения.
В соответствии с одной общей формой предоставляется узел переключателя для ультразвуковой хирургического аппарата, содержащий корпус рукоятки, выполненный с возможностью удержания в одной руке. По меньшей мере в одной форме узел переключателя содержит первое устройство переключения, функционально установленное на передней части корпуса рукоятки и выборочно перемещаемое относительно по меньшей мере одного контакта первого переключателя. Узел переключателя далее содержит второе устройство переключения, которое содержит по меньшей мере одну из правой кнопки переключения и левой кнопки переключения. Правая кнопка переключения может быть подвижно закреплена на правой стороне корпуса рукоятки и может быть избирательно перемещена относительно по меньшей мере одного контакта правого переключателя, установленного на корпусе рукоятки. Левая кнопка переключения может быть подвижно закреплена на левой стороне корпуса рукоятки и может быть избирательно перемещена относительно по меньшей мере одного контакта левого переключателя, установленного на корпусе рукоятки. Первое и второе устройства переключения могут быть выполнены с возможностью избирательного приведения в действие одной рукой, удерживающей корпус рукоятки.
В соответствии с по меньшей мере одной другой общей формой предоставляется ультразвуковой хирургический аппарат. По меньшей мере в одной форме ультразвуковой хирургический аппарат содержит генератор для генерирования ультразвуковых сигналов и узел рукоятки, который содержит корпус рукоятки, выполненный с возможностью функционального удерживания одной рукой. Аппарат может далее содержать узел переключателя, содержащий первое устройство переключения, функционально установленное на передней части корпуса рукоятки и выборочно перемещаемое относительно по меньшей мере одного контакта переключателя, который обменивается данными с генератором. Узел переключателя может далее содержать второе устройство переключения, которое содержит по меньшей мере одну из правой кнопки переключения и левой кнопки переключения. Правая кнопка переключения может быть подвижно закреплена на правой стороне корпуса рукоятки и может быть избирательно перемещена относительно по меньшей мере одного контакта правого переключателя, установленного на корпусе рукоятки. По меньшей мере один контакт правого переключателя может обмениваться данными с генератором. Левая кнопка переключения может быть подвижно закреплена на левой стороне корпуса рукоятки и может быть избирательно перемещена относительно по меньшей мере одного контакта левого переключателя, установленного на корпусе рукоятки, и может функционально обмениваться данными с генератором. Первое и второе устройства переключения могут быть выполнены с возможностью избирательного приведения в действие одной рукой, удерживающей корпус рукоятки.
В соответствии с еще одной общей формой предоставляется узел переключателя для ультразвуковой хирургического аппарата, содержащий корпус рукоятки, выполненный с возможностью удерживания одной рукой. По меньшей мере в одной форме узел переключателя содержит узел кнопки, подвижно закрепленный на корпусе рукоятки для избирательного осевого и шарнирного перемещения относительно контакта правого переключателя, контакта центрального переключателя и контакта левого переключателя таким образом, что осевое перемещение узла кнопки в первом направлении вызывает активацию контакта центрального переключателя, а шарнирное перемещение узла кнопки в первом поворотном направлении вызывает активацию контакта левого переключателя, а шарнирное перемещение узла кнопки во втором поворотном направлении вызывает активацию контакта правого переключателя.
В соответствии с различными формами соединительный модуль может представлять собой модульный компонент, который может предоставляться в виде вспомогательного приспособления для ультразвукового хирургического аппарата или его компонентов, не прикрепленного к ним, или может использоваться для ремонта, замены или модернизации ультразвуковых хирургических аппаратов. В определенных формах, однако, соединительный модуль может быть связан с узлом рукоятки или ультразвуковым преобразователем. В одной форме соединительный модуль может содержать узел, который может быть с легкостью удален и/или заменен пользователем. Соединительный модуль может также содержать съемные элементы, которые позволяют пользователю, например, удалять и/или заменять поворотные муфты, проводники переключателей или звенья. Соответственно, в определенных формах в комплекте может содержаться один и более соединительных модулей. Комплект может содержать различные поворотные муфты, сконфигурированные для адаптируемого использования с одним или более ультразвуковыми преобразователями или рукоятками. Комплект может содержать соединительные модули, поворотные муфты или корпуса, содержащие различные конфигурации пользовательских интерфейсов, которые могут требовать один, два или более проводящих путей.
В одном аспекте, настоящее раскрытие направлено на ультразвуковой хирургический аппарат. Ультразвуковой аппарат может содержать концевой зажим, волновод, продолжающийся проксимально из концевого зажима вдоль продольной оси и соединительный модуль для приема ультразвуковой рукоятки. Соединительный модуль может содержать корпус, определяющий шпиндель, продолжающийся вдоль продольной оси, муфту, расположенную на шпинделе и поворачиваемую относительно корпуса, первый проводник, механически сочлененный с корпусом и продолжающийся по меньшей мере частично вокруг продольной оси, и первое звено, поворачиваемое вокруг продольной оси относительно первого проводника между первым положением и вторым положением. Первое звено может содержать первый контакт, расположенный в электрическом контакте с первым проводником, причем первое звено находится в первом положении и втором положении, и второй контакт, электрически связанный с первым контактом и расположенный в электрическом контакте с ультразвуковой рукояткой, когда первое звено находится в первом положении и втором положении.
В одном аспекте каждый из первого и второго проводников содержит проводящий вывод, выполненный с возможностью электрического сочленения с пользовательским интерфейсом и получения сигналов управления мощностью от пользователя. Ультразвуковая рукоятка может быть приспособлена для электрического подсоединения к генератору и поворотного сочленения с первым и вторым звеньями при введении ее в соединительный модуль. Соединительный модуль может быть выполнен с возможностью электрического соединения с контуром пользовательского интерфейса и генератором с помощью ультразвуковой рукоятки, когда первое и второе звенья находятся в соответствующих первом и втором положениях. В одном аспекте пользовательский интерфейс содержит рычажный переключатель, функционально сочлененный с узлом рукоятки, соединительный модуль прикреплен к узлу рукоятки. Ультразвуковая рукоятка может вращаться относительно узла рукоятки, когда она ведена в соединительный модуль. В одном аспекте корпус электрически изолирует первый и второй проводники друг от друга.
Различные аспекты объекта изобретения, описанного в этом документе, направлены на устройство, содержащее контур, выполненный с возможностью передачи сигнала в виде серийного протокола по паре электрических проводников. Серийный протокол может быть определен как последовательность импульсов, распространяемых по меньшей мере по одному кадру передачи данных. По меньшей мере один импульс в кадре передачи данных одновременно кодируется путем модуляции амплитуды импульса для представления одного из двух первых логических состояний и модуляции ширины импульса для представления одного из двух вторых логических состояний.
Различные аспекты объекта изобретения, описанного в этом документе, относятся к аппарату, содержащему контур, выполненный с возможностью передачи сигнала в виде серийного протокола по паре электрических проводников. Серийный протокол может быть определен как последовательность импульсов, распространяемых по меньшей мере через один кадр передачи данных. По меньшей мере один импульс в кадре передачи данных может быть одновременно закодирован путем модуляции амплитуды импульса для представления одного из двух первых логических состояний и модуляции ширины импульса для представления одного из двух вторых логических состояний. Аппарат может также содержать устройство вывода, соединенное с выходом контура; и устройство ввода, соединенное с входом контура.
Различные аспекты объекта изобретения, описанного в этом документе, относятся к генератору, содержащему контур согласования, выполненный с возможностью обмена данными с аппаратом по двухпроводному интерфейсу. Генератор может содержать контур управления, выполненный с возможностью передачи сигнала в виде серийного протокола по паре электрических проводников. Серийный протокол может быть определен как последовательность импульсов, распространяемых по меньшей мере через один кадр передачи данных. По меньшей мере один импульс в кадре передачи данных одновременно кодируется путем модуляции амплитуды импульса для представления одного из двух первых логических состояний и модуляции ширины импульса для представления одного из двух вторых логических состояний. Генератор может также содержать энергетический контур, выполненный с возможностью приводить в действие аппарат.
Различные аспекты направлены на способы приведения в действие концевого зажима, соединенного с ультразвуковой приводной системой ультразвукового хирургического аппарата. Может быть получен запускающий сигнал. В ответ на запускающий сигнал, первый управляющий сигнал может быть передан к ультразвуковой приводной системе для приведения в действие концевого зажима на первом уровне мощности. Первый управляющий сигнал может поддерживаться на протяжении первого периода времени. В конце первого периода времени второй управляющий сигнал может быть передан к ультразвуковой приводной системе для приведения в действие концевого зажима на втором уровне мощности, меньшем, чем первый уровень мощности.
В другом аспекте после получения запускающего сигнала хирургическая система генерирует обратную связь, обозначающую, что ультразвуковой хирургический аппарат активируется при поддержании ультразвукового аппарата в неактивированном состоянии. В конце порогового периода времени ультразвуковой хирургический аппарат активируется путем передачи управляющего сигнала к ультразвуковой приводной системе для приведения в действие концевого зажима.
В другом аспекте ультразвуковой хирургический аппарат активируется путем генерирования управляющего сигнала, передаваемого к ультразвуковой приводной системе для приведения в действие концевого зажима. Множество вводимых переменных могут быть применены к модели с несколькими переменными для генерирования выходного сигнала модели с несколькими переменными, при этом выходной сигнал модели с несколькими переменными соответствует воздействию ультразвукового хирургического аппарата на ткань. Множество вводимых переменных может содержать по меньшей мере одну переменную, описывающую управляющий сигнал, и по меньшей мере одну переменную, описывающую свойство ультразвукового хирургического аппарата. Когда выходной сигнал модели с несколькими переменными достигает ого значения, может быть генерирована обратная связь, указывающая на соответствующее состояние по меньшей мере одного ультразвукового хирургического аппарата и ткани, на которую воздействует этот ультразвуковой хирургический аппарат.
В другом аспекте в ответ на запускающий сигнал первый управляющий сигнал с первым уровнем мощности передается к ультразвуковой приводной системе для приведения в действие концевого зажима. Первый управляющий сигнал поддерживается на первом уровне в течение первого периода времени. Второй управляющий сигнал передается к ультразвуковой приводной системе для приведения в действие концевого зажима на втором уровне мощности, меньшем, чем первый уровень мощности. Множество вводимых переменных могут быть применены к модели с несколькими переменными для генерирования выходного сигнала модели с несколькими переменными. Выходной сигнал модели с несколькими переменными может соответствовать воздействию ультразвукового хирургического аппарата на ткань, а множество переменных может содержать по меньшей мере одну переменную, описывающую управляющий сигнал, и по меньшей мере одну переменную, описывающую свойство ультразвукового хирургического аппарата. После того как выходной сигнал модели с несколькими переменными превышает значение предела для ого периода времени, может быть запущено первое ответное действие.
Хотя было описано и проиллюстрировано несколько форм, заявитель не намеревался ущемить или ограничить объем прилагаемых пунктов формулы изобретения такими описанными деталями. Возможны многие варианты, изменения и замещения, понятные специалистам в данной области, без отклонения от области действия изобретения. Более того, структура каждого элемента, связанного с описанными формами, может быть в качестве альтернативы описана как средство предоставления функциональной возможности, выполняемой этим элементом. Следовательно, подразумевается, что описанные формы будут ограничены только объемом прилагаемых пунктов формулы изобретения.
Ссылки, приводимые в тексте данного повествования на фразы «различные формы», «некоторые формы», «одна форма» или «форма», означают, что конкретное свойство, структура или характеристика, описанное в связи с формой, содержится по меньшей мере в одной форме. Таким образом, фразы «в различных формах», «в некоторых формах» или «в одной форме», встречающиеся в различных местах этого повествования не обязательно все относятся к одной и той же форме. Более того, конкретные особенности, структуры или характеристики могут быть скомбинированы любым подходящим способом в одной или более формах. Таким образом, конкретные конструктивные особенности, структуры или характеристики, показанные или описанные в связи с одной формой, могут без ограничений быть скомбинированы, полностью или частично, с конструктивными особенностями, структурами или характеристиками одной или более других форм.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВА ПЕРЕКЛЮЧЕНИЯ ДЛЯ УЛЬТРАЗВУКОВЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2648854C2 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ДЛЯ РАССЕЧЕНИЯ И КОАГУЛЯЦИИ | 2013 |
|
RU2669023C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВАНИИ ЭЛЕКТРИЧЕСКОГО ПАРАМЕТРА, СВЯЗАННОГО С ТОКОМ ДВИГАТЕЛЯ | 2016 |
|
RU2731410C2 |
| МНОГОПРОЦЕССОРНЫЙ КОНТРОЛЬ ДВИГАТЕЛЕЙ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2663487C2 |
| КОНЦЕВОЙ ЭФФЕКТОР, ВЫПРЯМЛЯЕМЫЙ С ПОМОЩЬЮ ДАТЧИКА ПРИ ИЗВЛЕЧЕНИИ ЧЕРЕЗ ТРОАКАР | 2014 |
|
RU2646575C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С СИЛОИЗМЕРИТЕЛЬНЫМ УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ | 2016 |
|
RU2728896C2 |
| ДЖОЙСТИКОВЫЕ УЗЛЫ ПЕРЕКЛЮЧАТЕЛЕЙ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2661144C2 |
| КОНФИГУРАЦИЯ ПЕРЕКЛЮЧАТЕЛЯ ПОВОРОТНОЙ РУЧКИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2690595C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ПРИБОР С КОНСТРУКЦИЕЙ РЕТРАНСЛЯЦИИ СИГНАЛА | 2014 |
|
RU2664168C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МЯГКИМ УПОРОМ | 2014 |
|
RU2669463C2 |
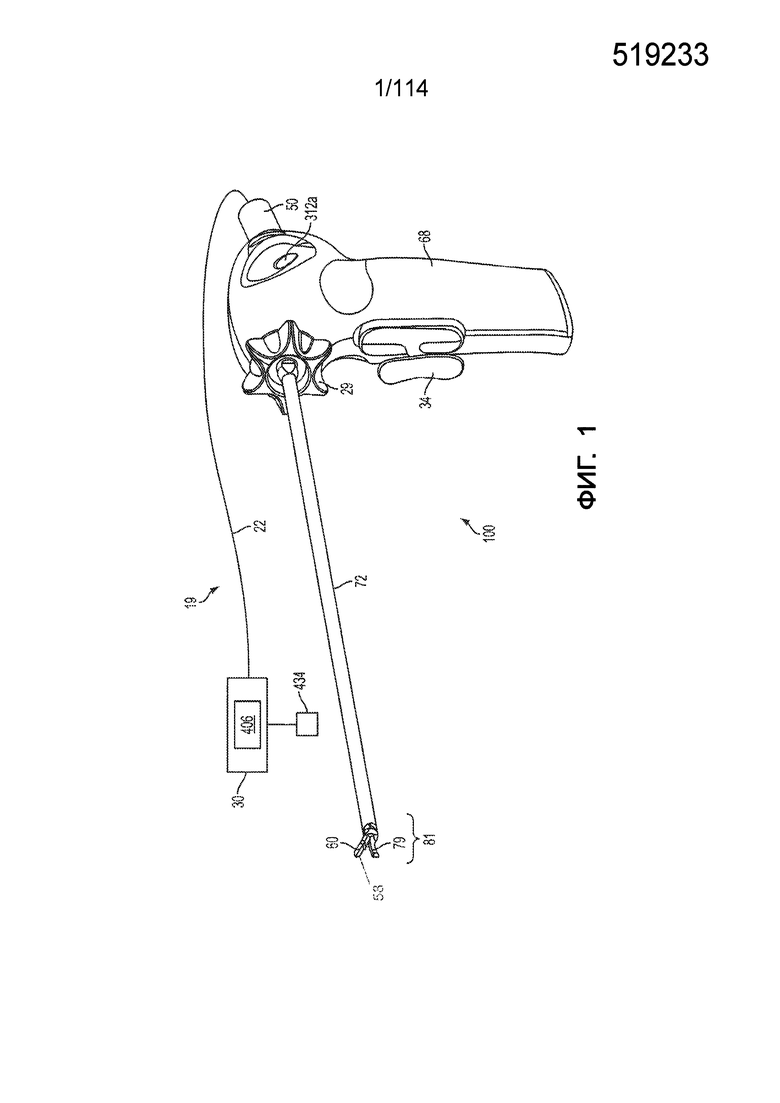
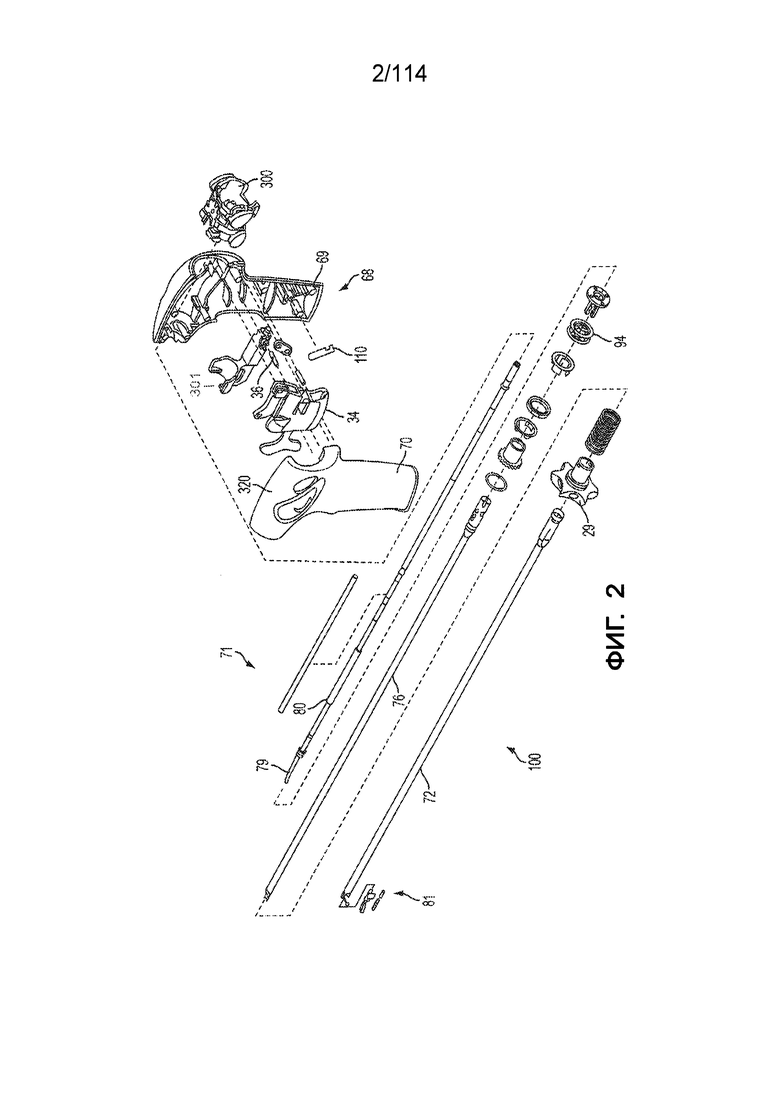
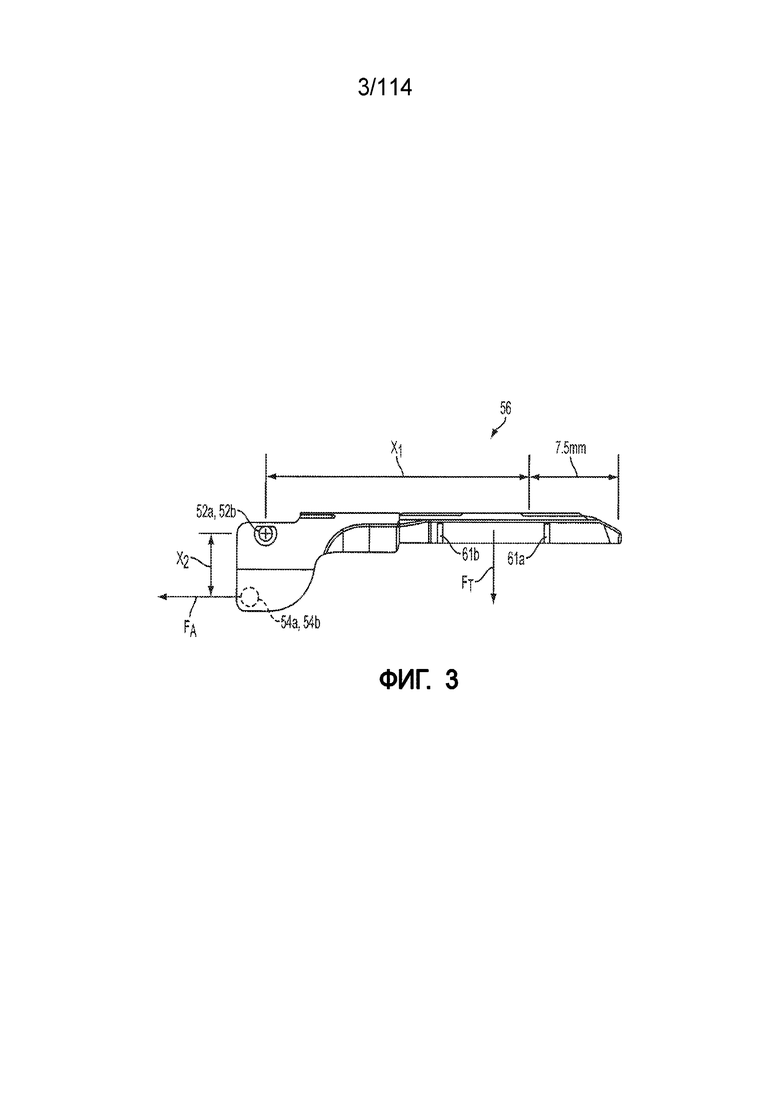
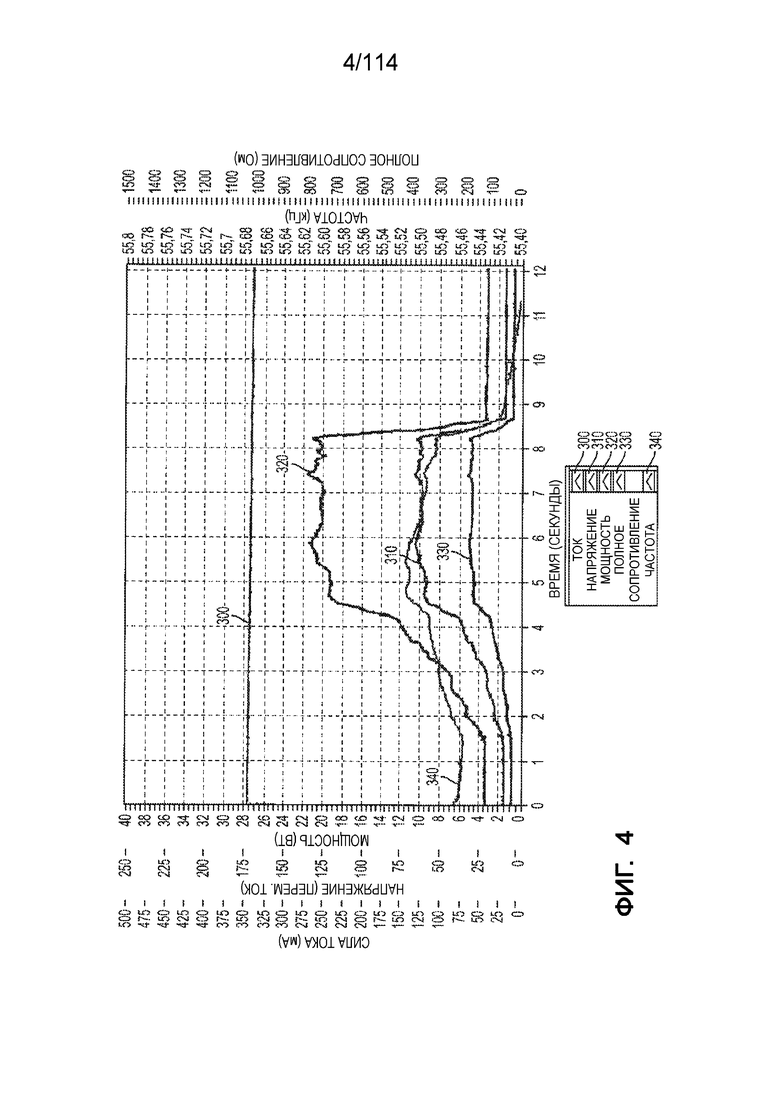
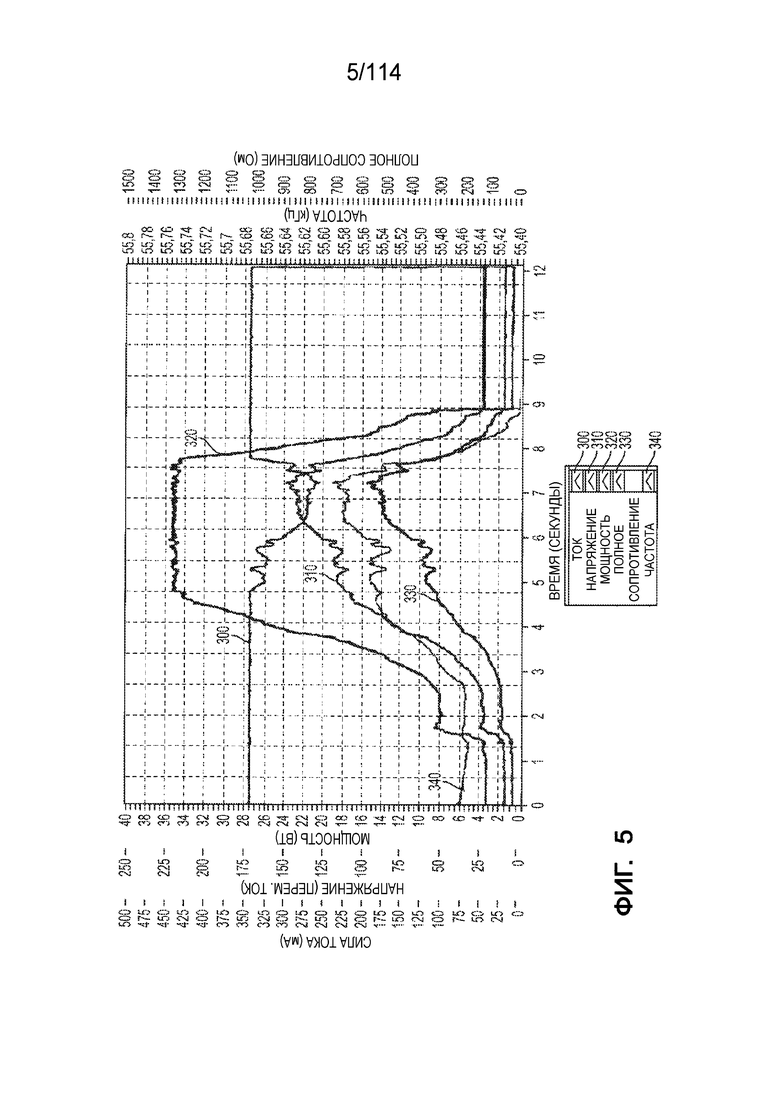
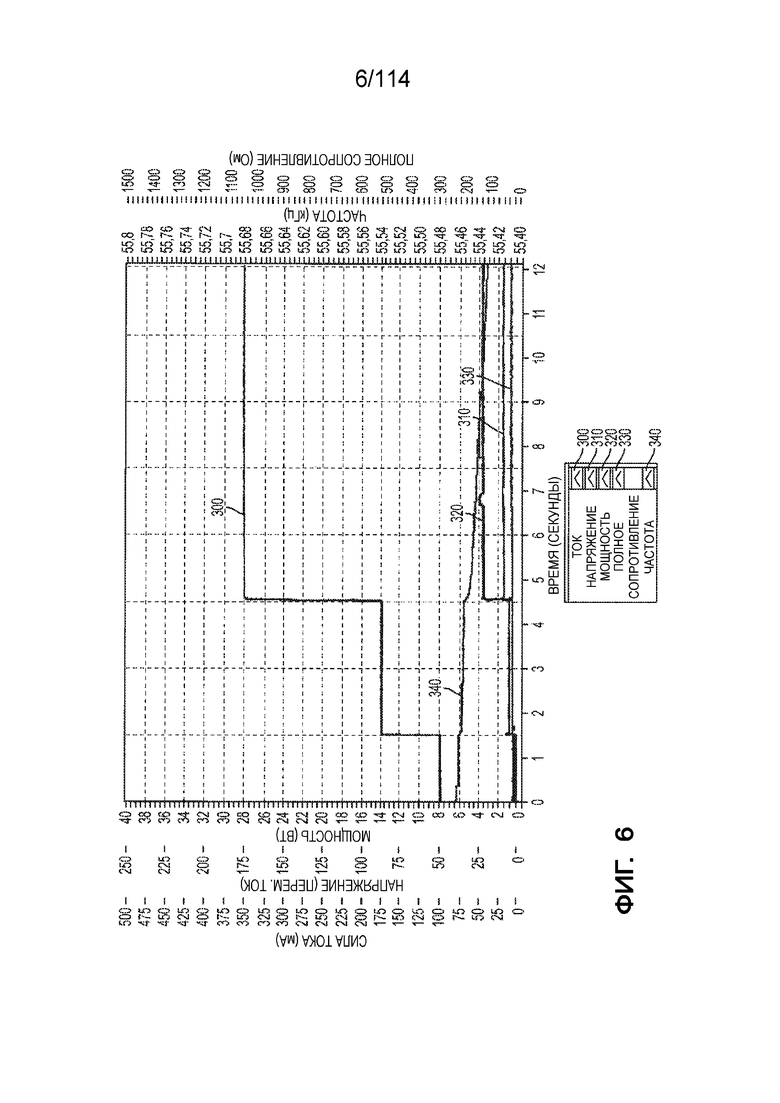
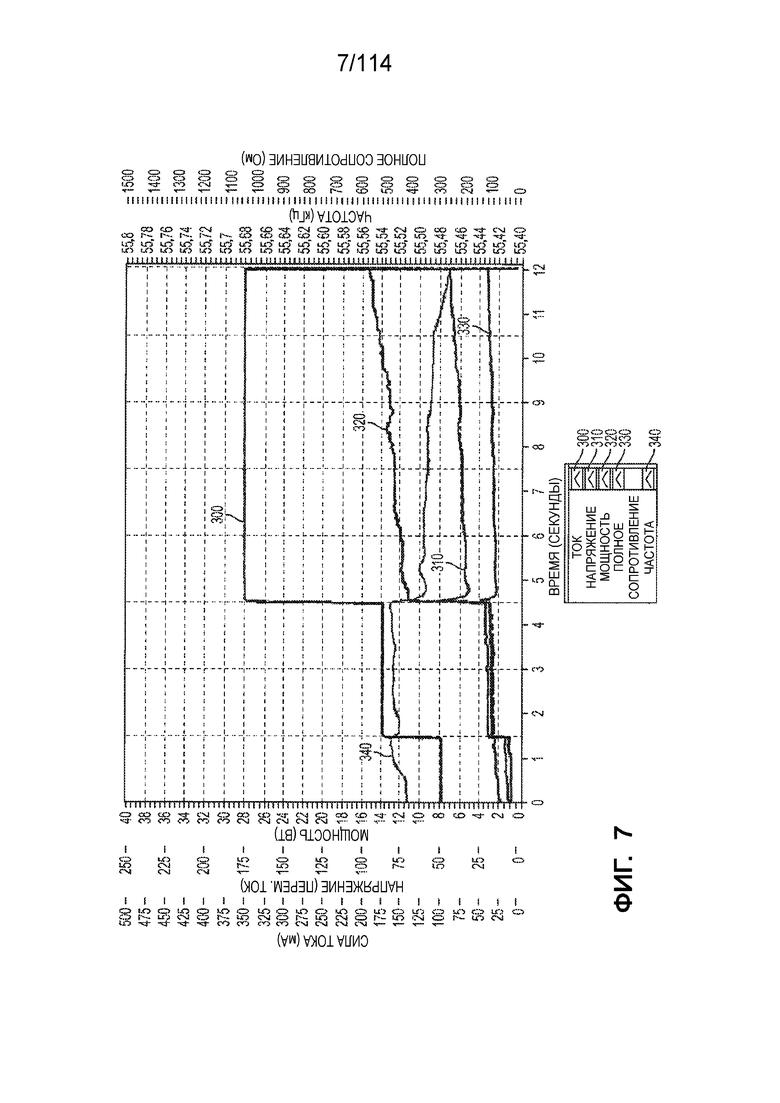
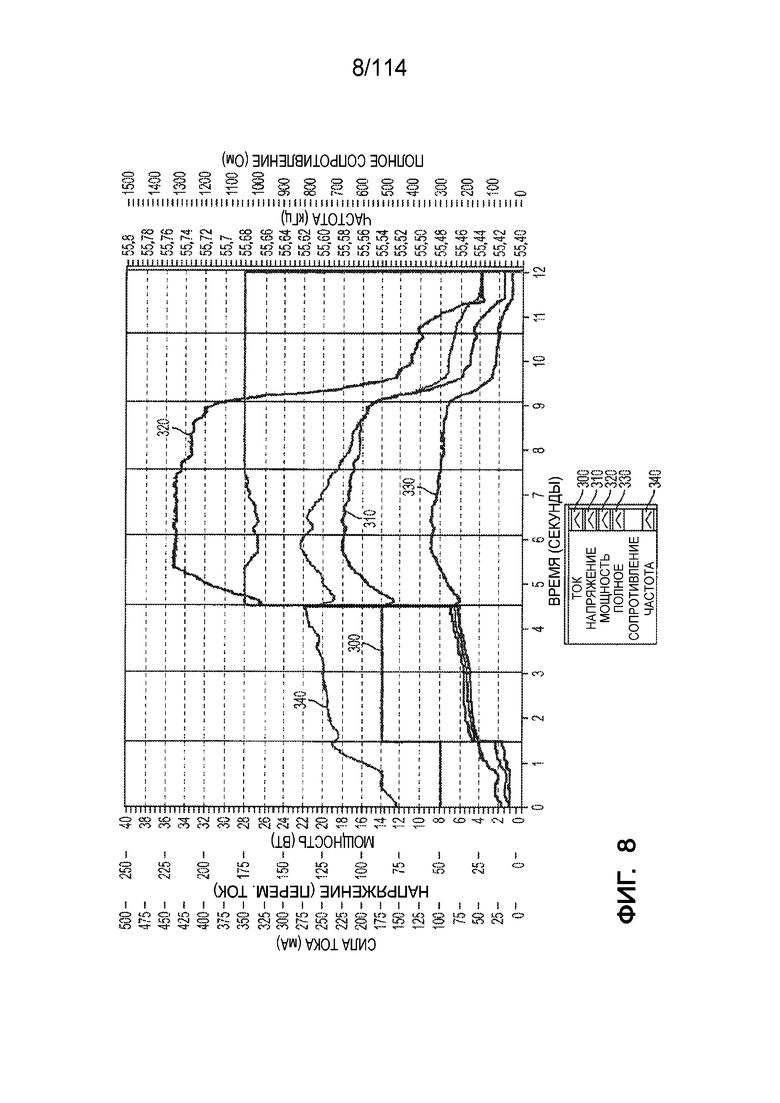


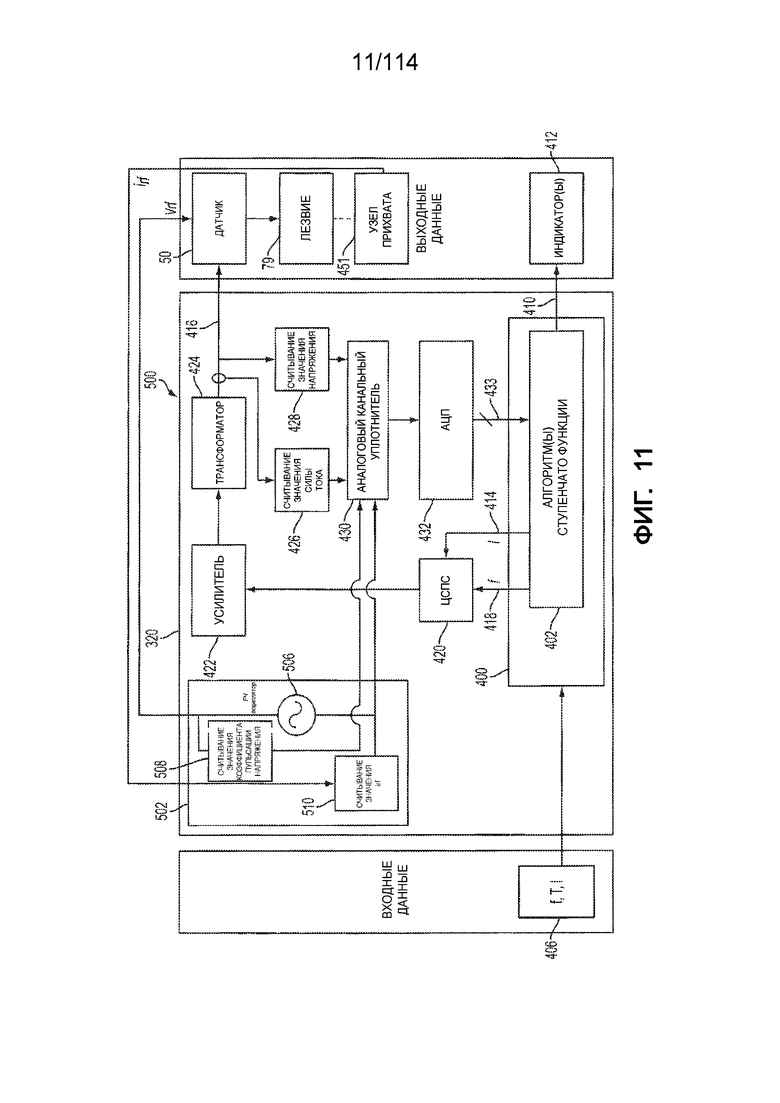
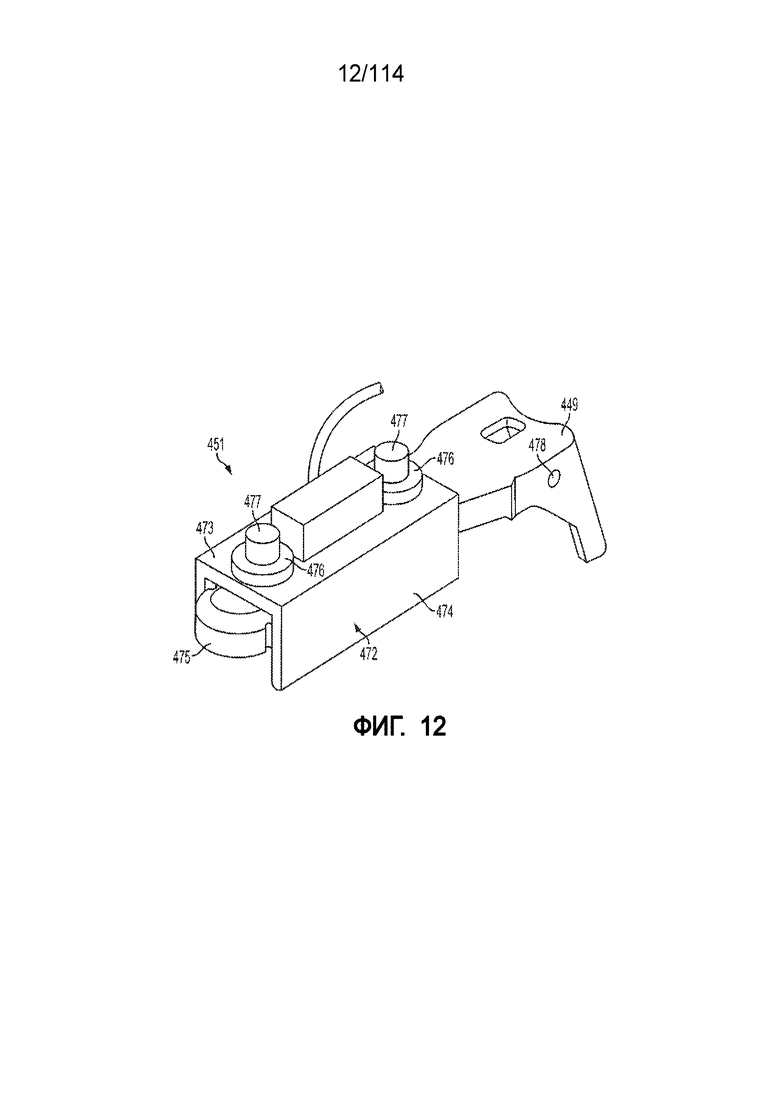

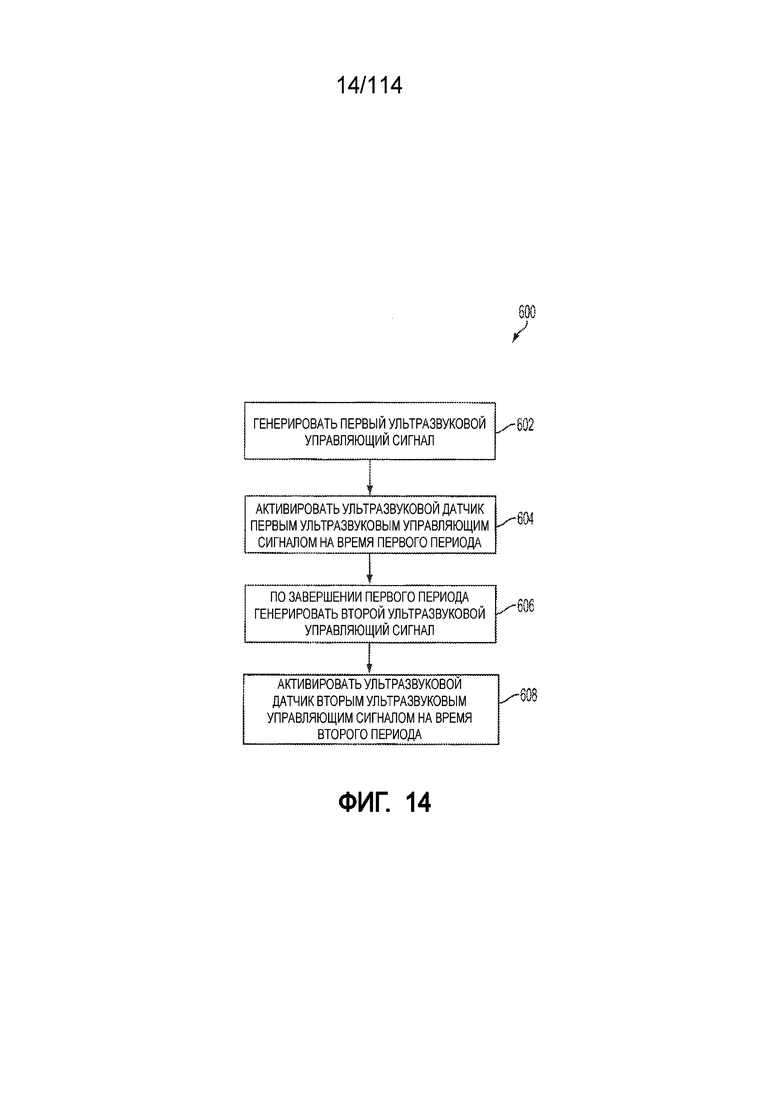

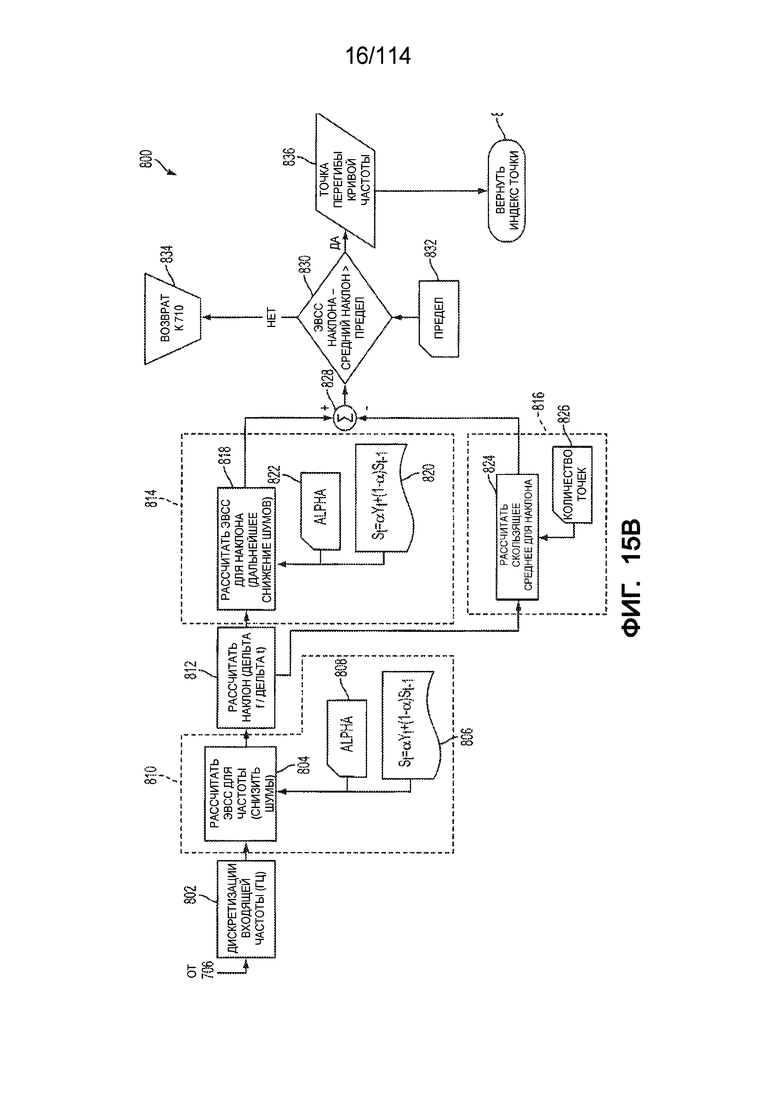
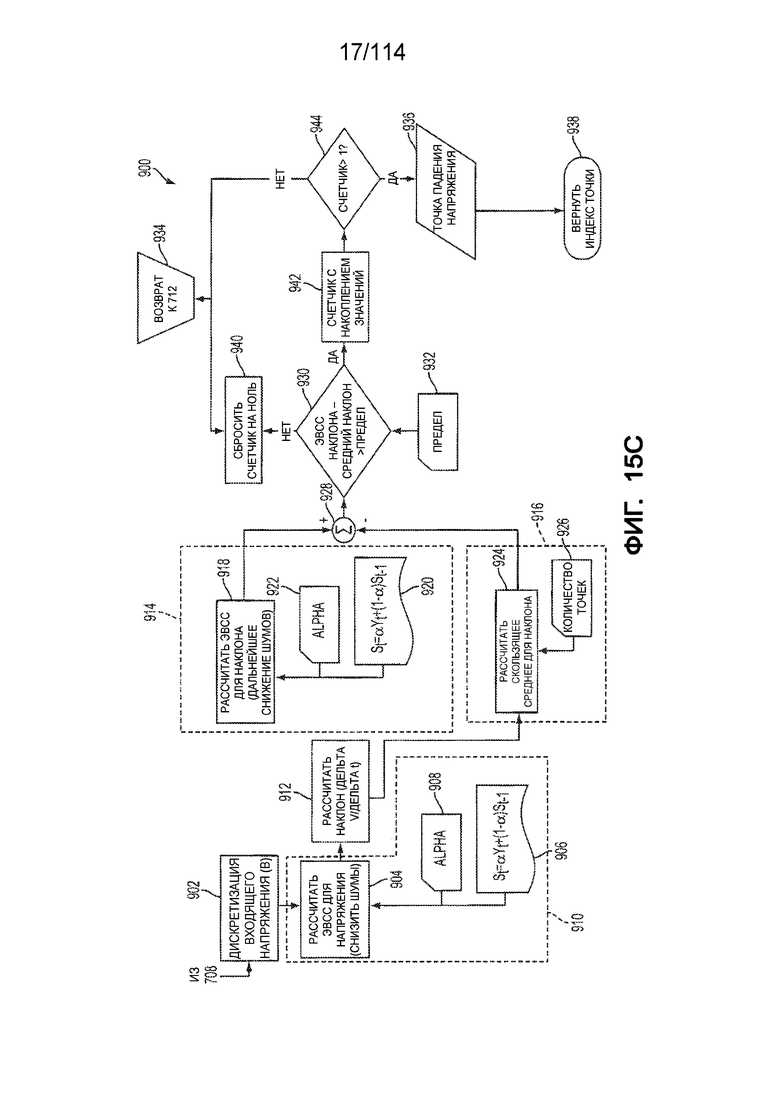
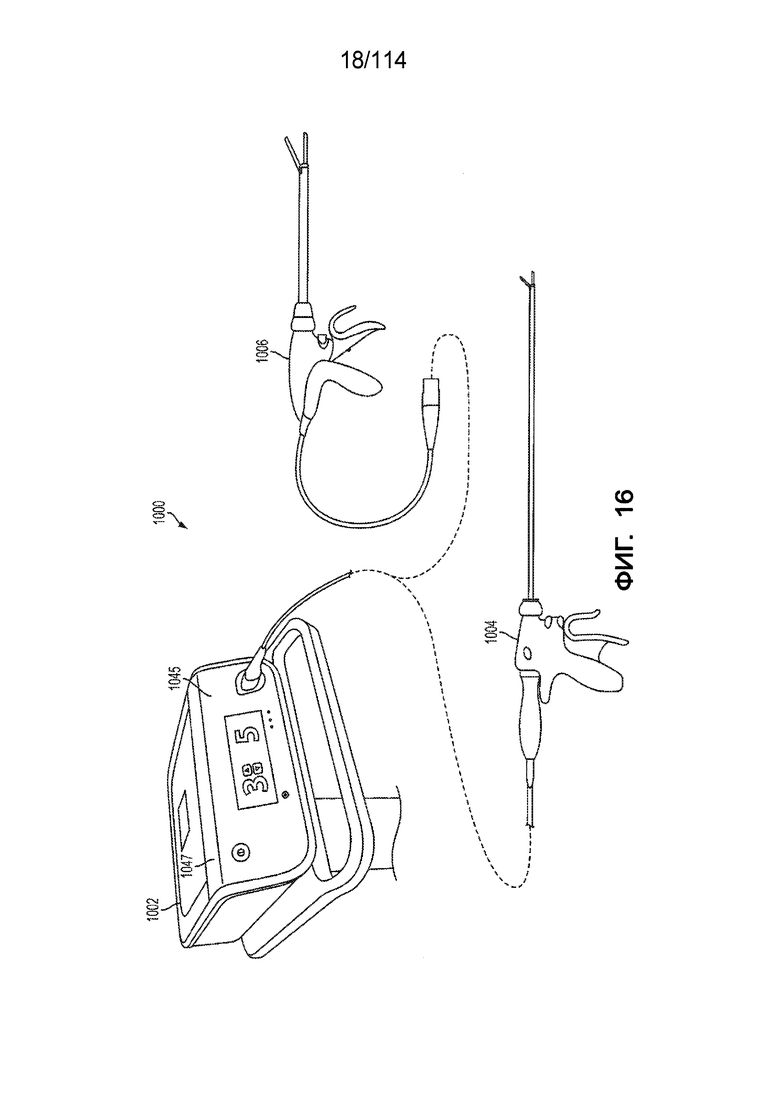

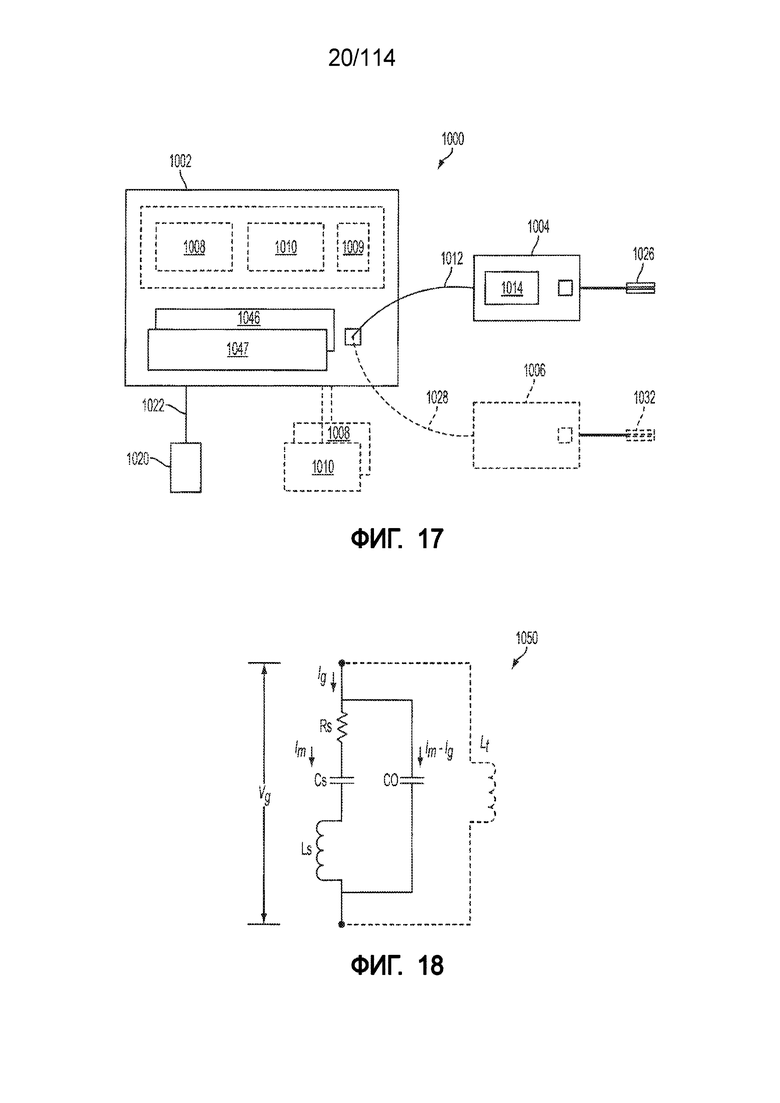
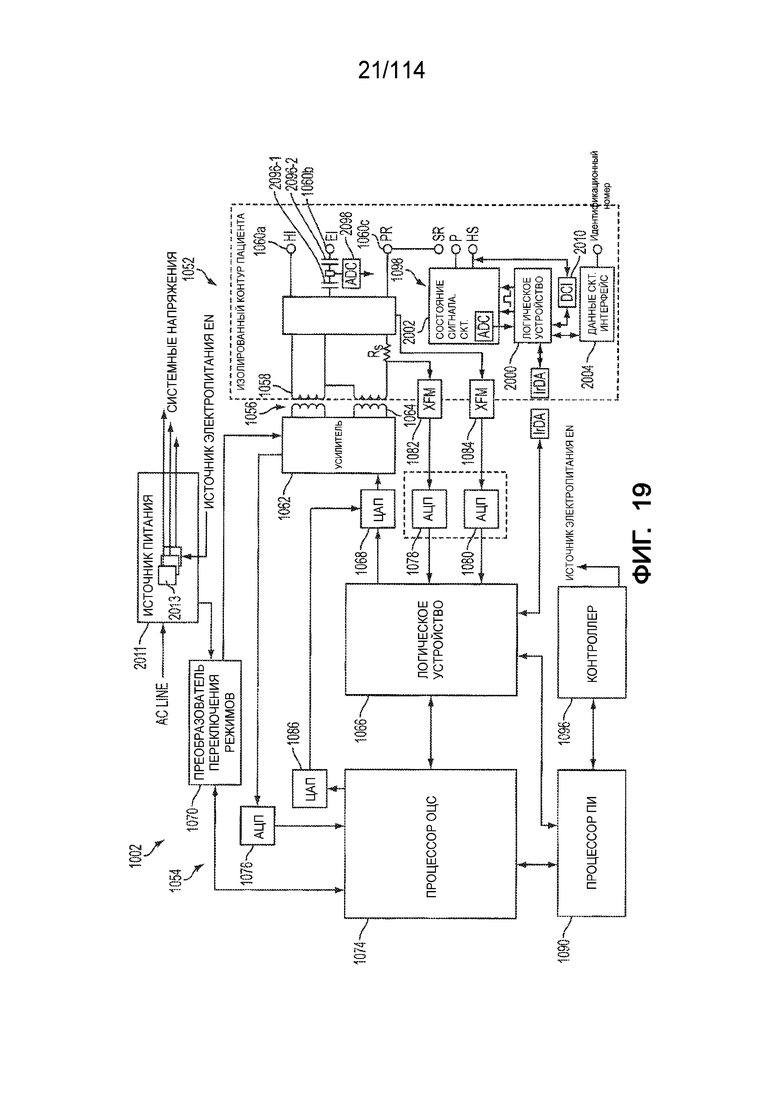
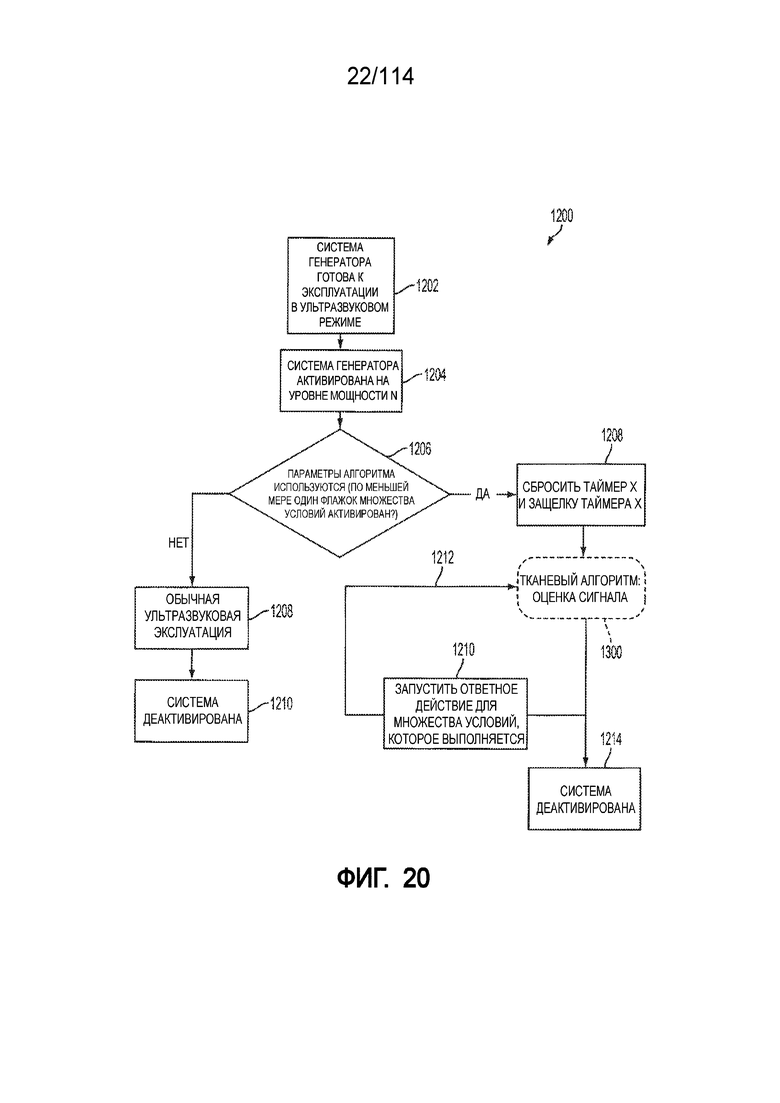

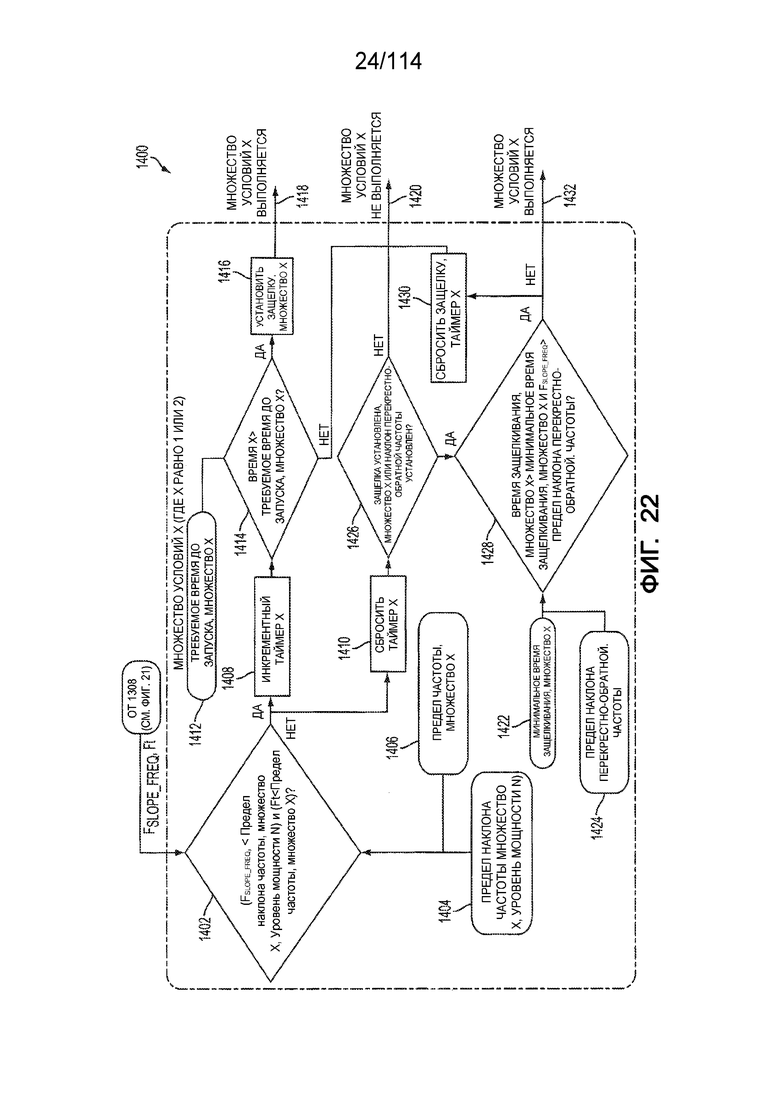

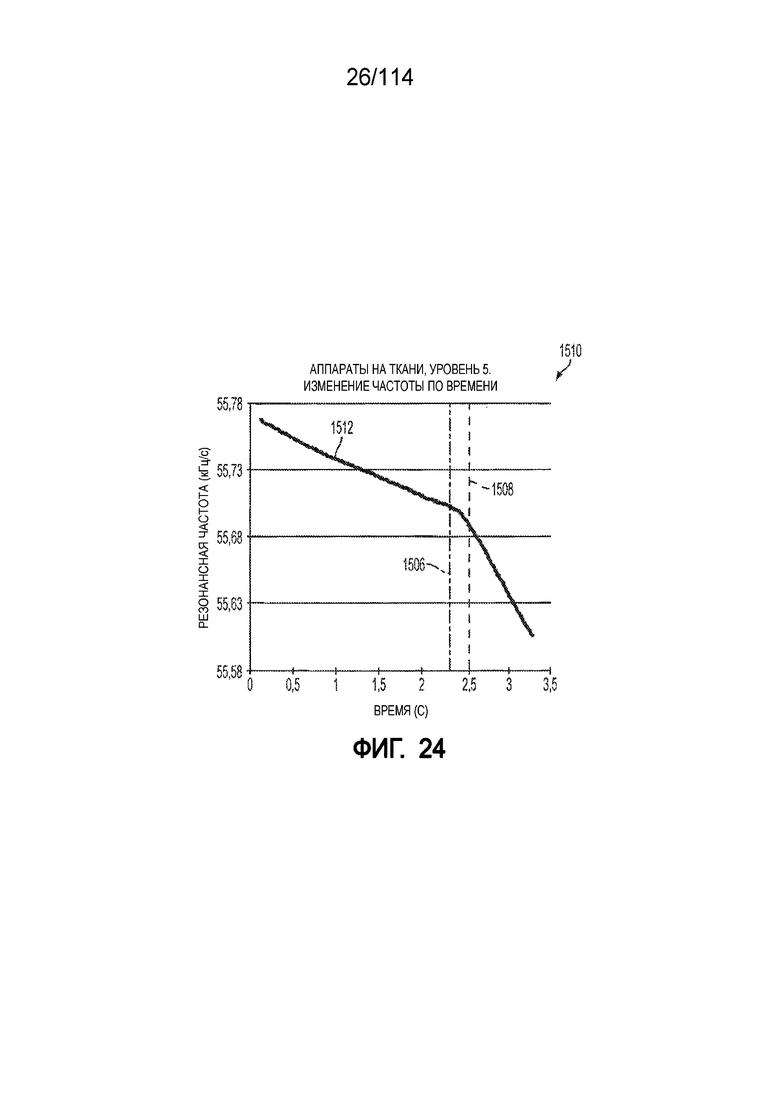
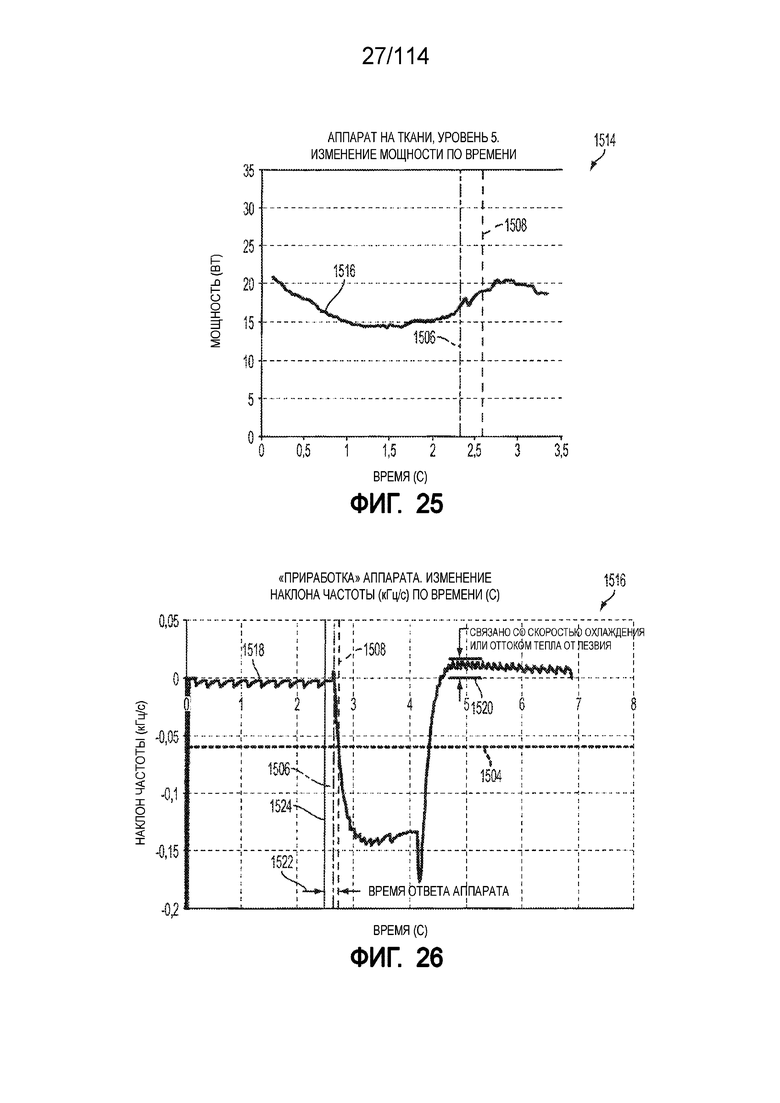
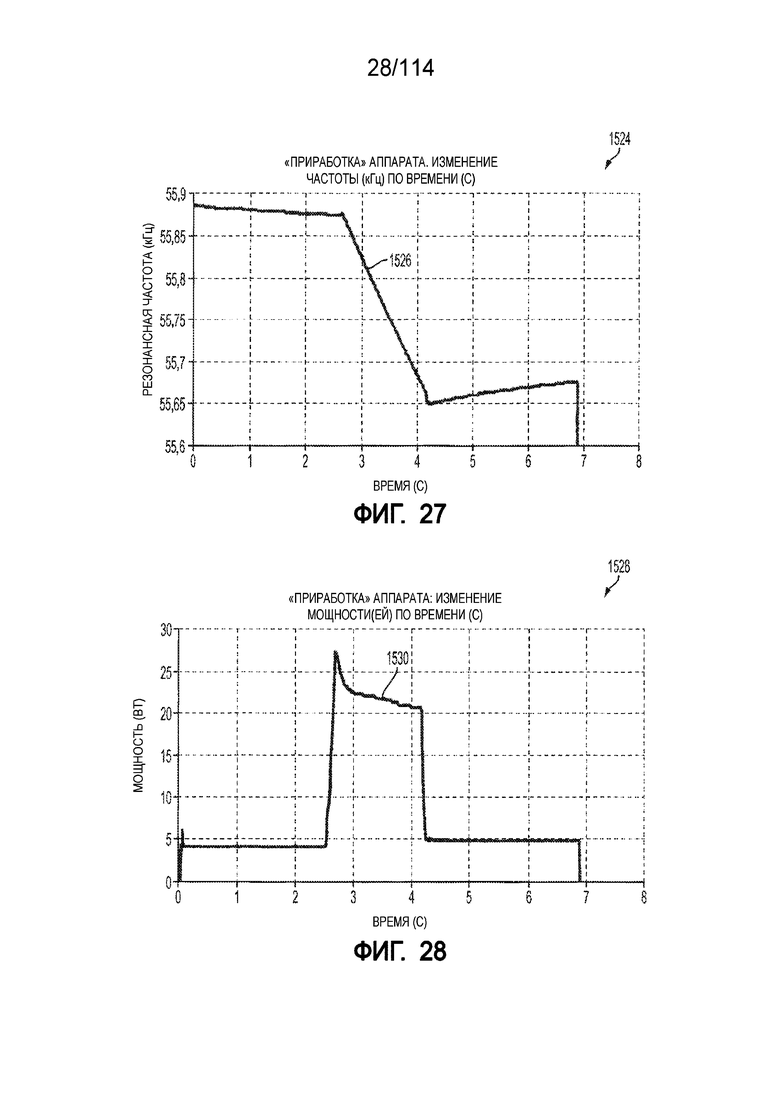

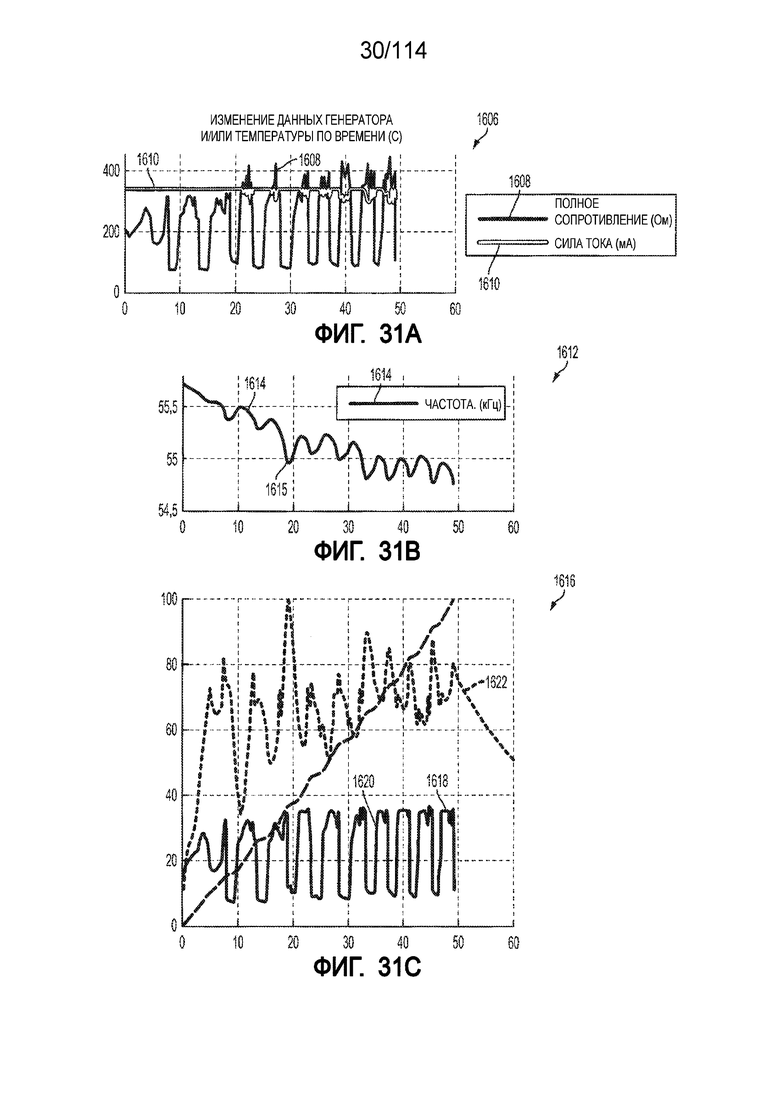
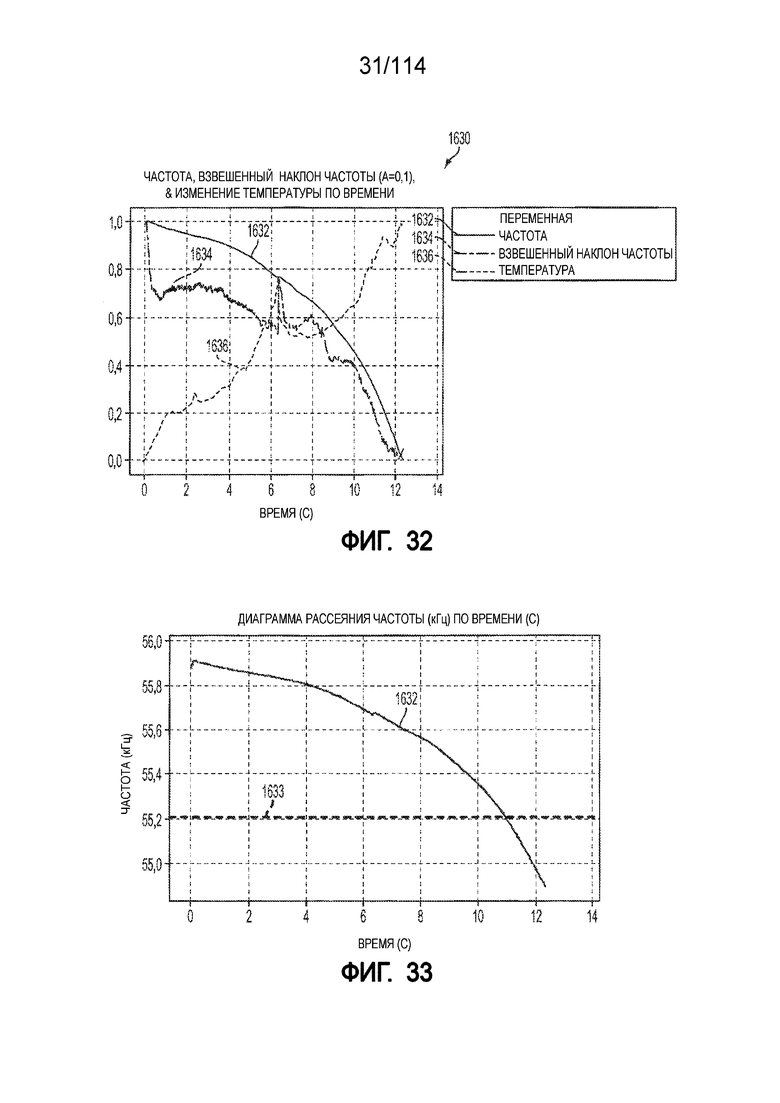
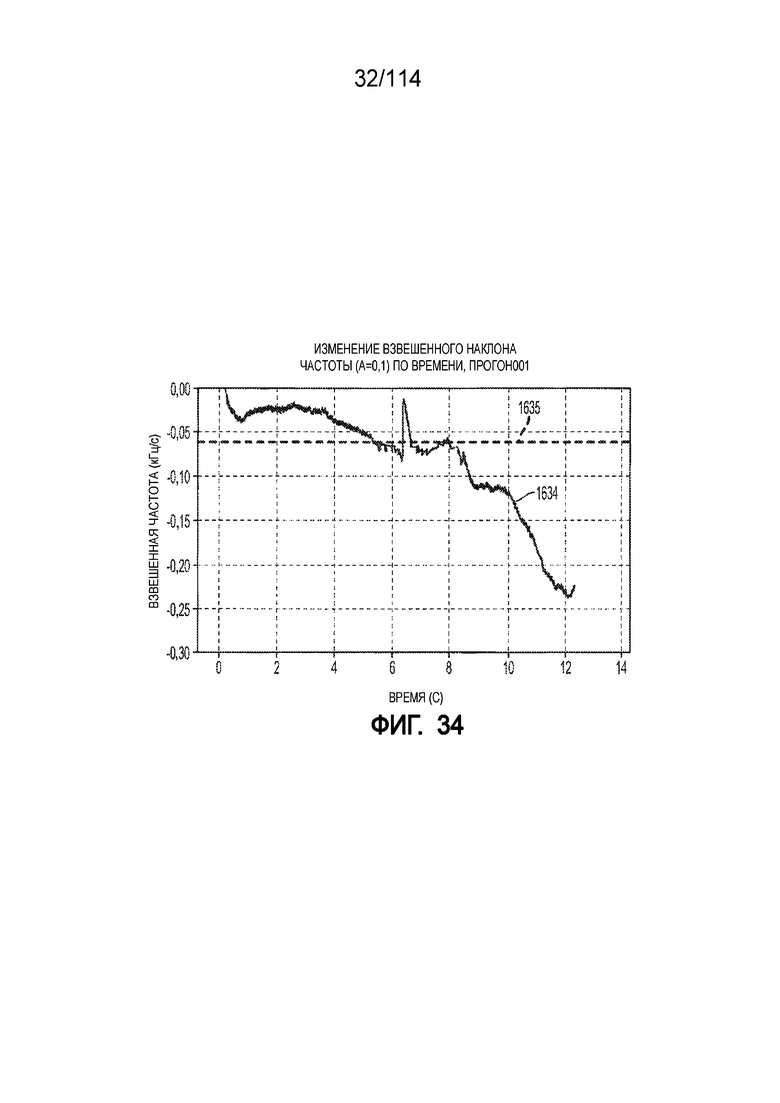
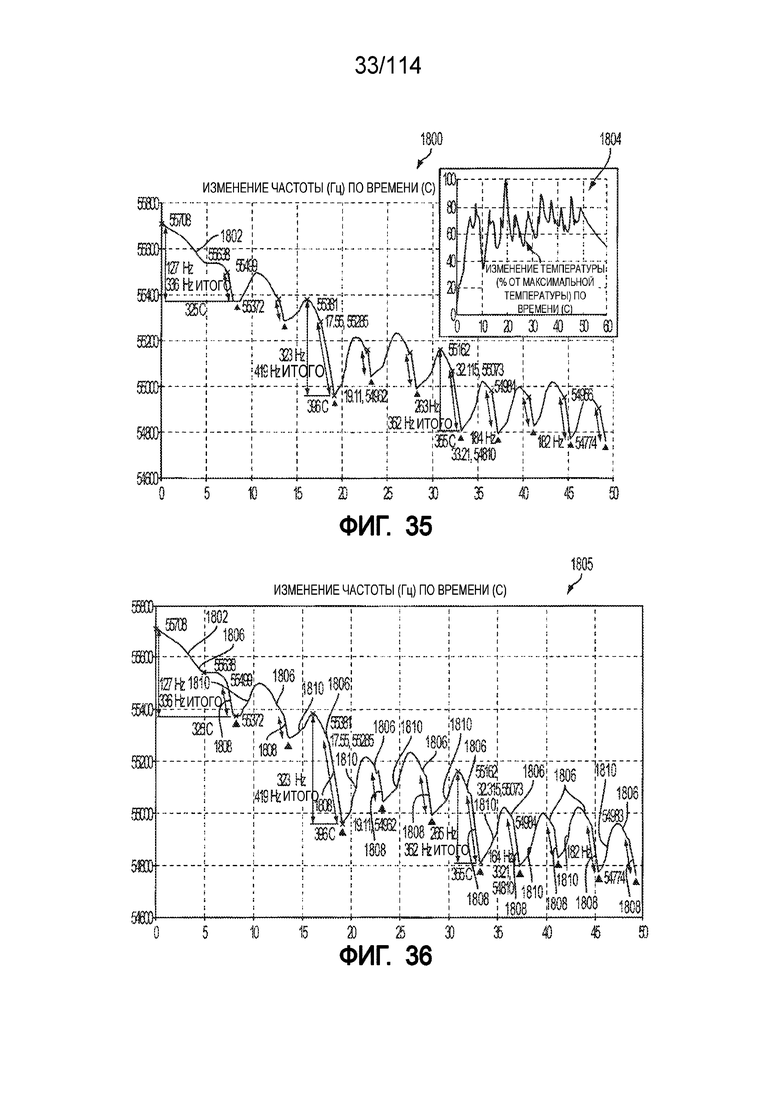

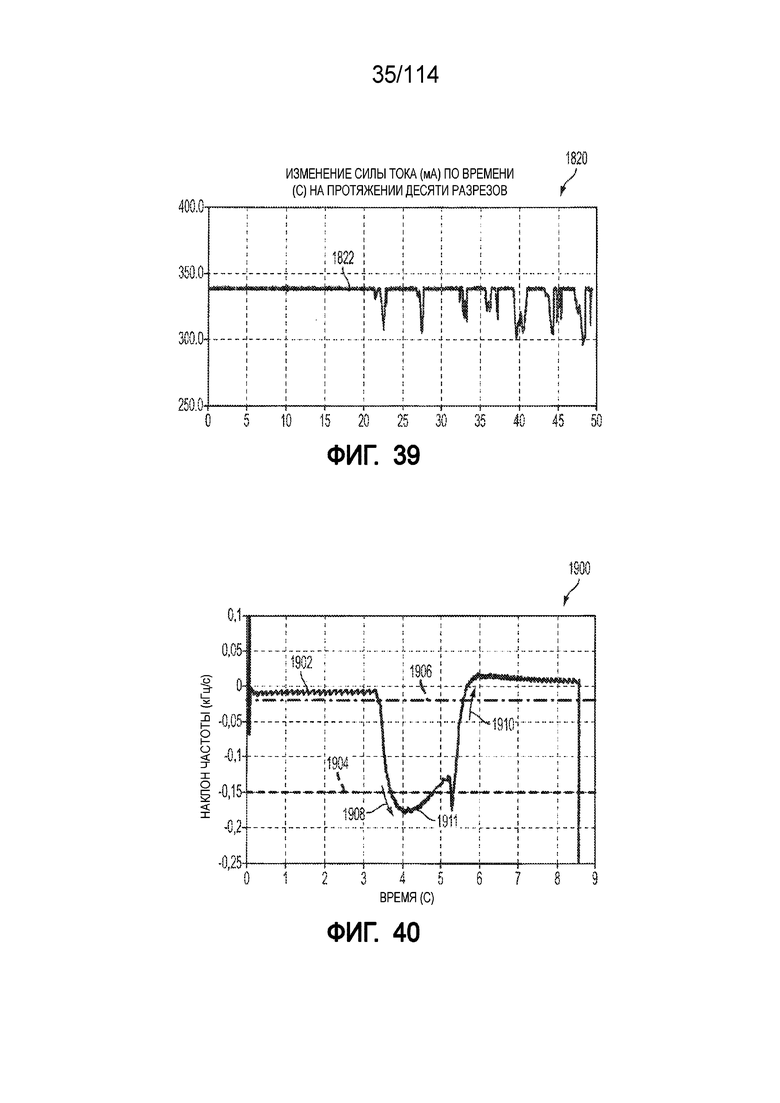
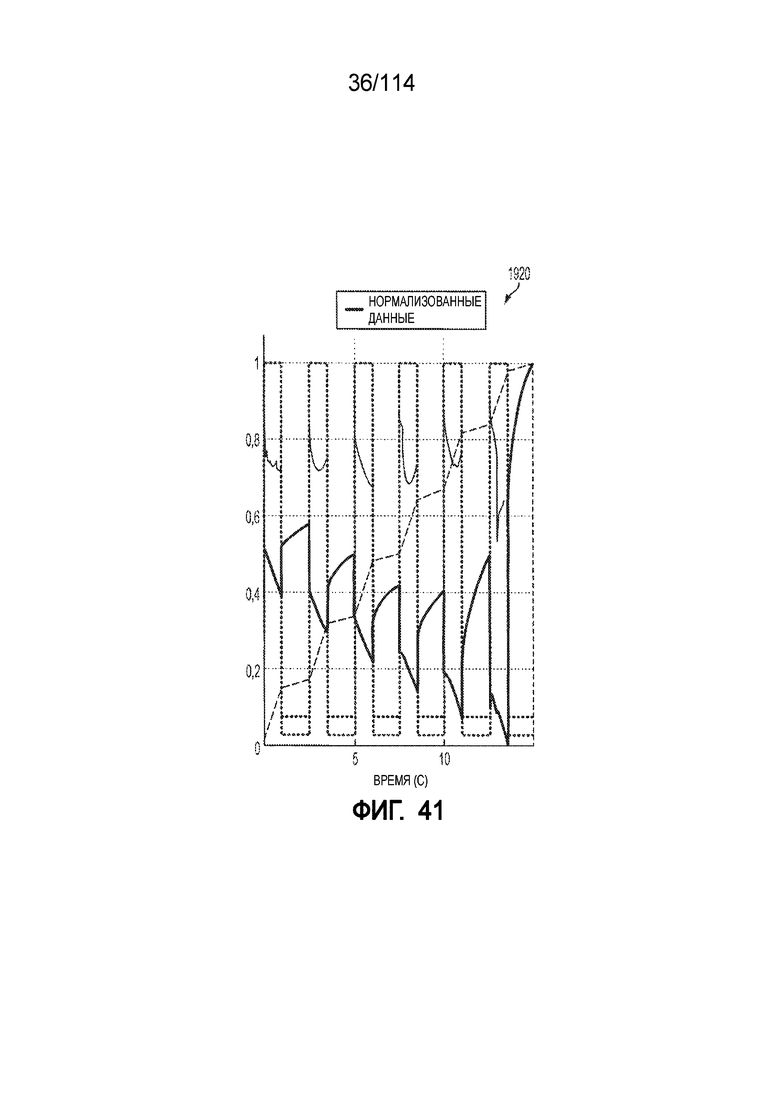
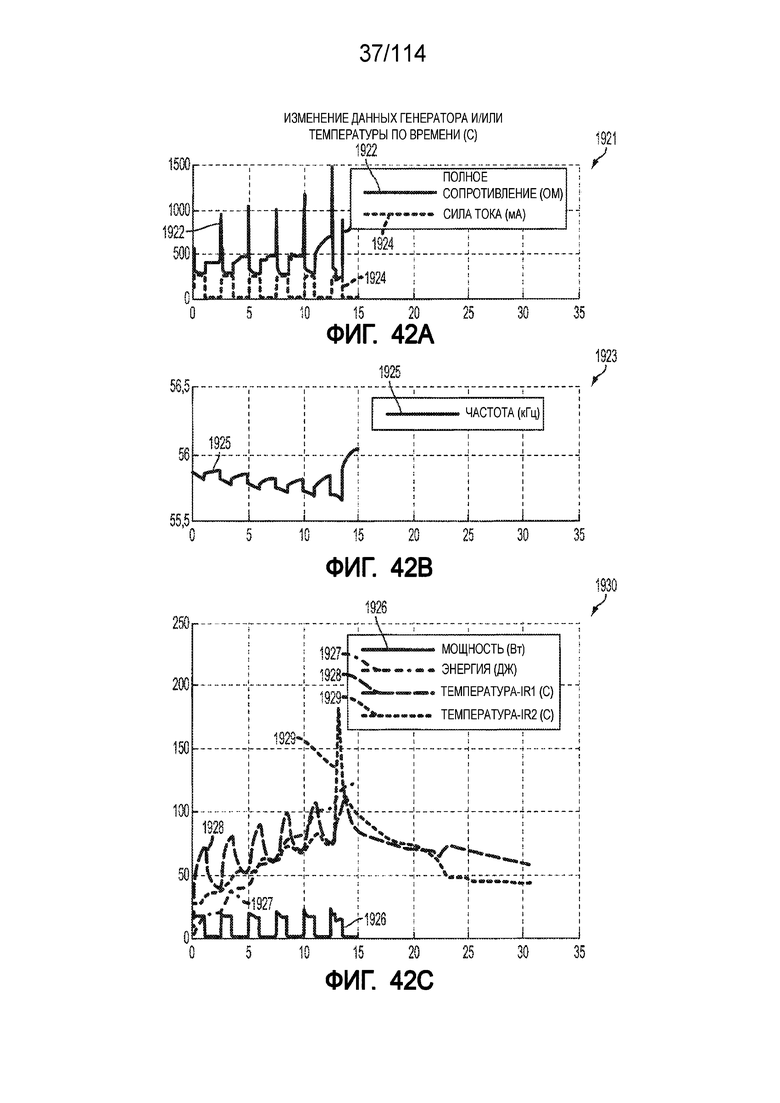
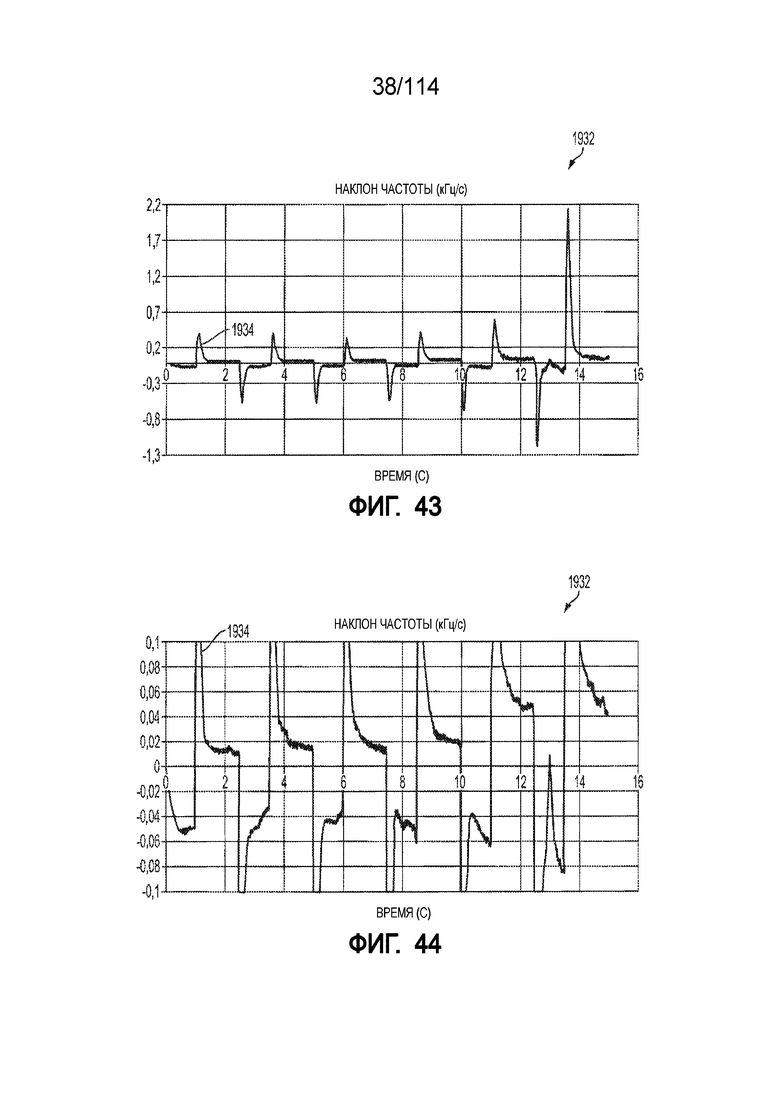
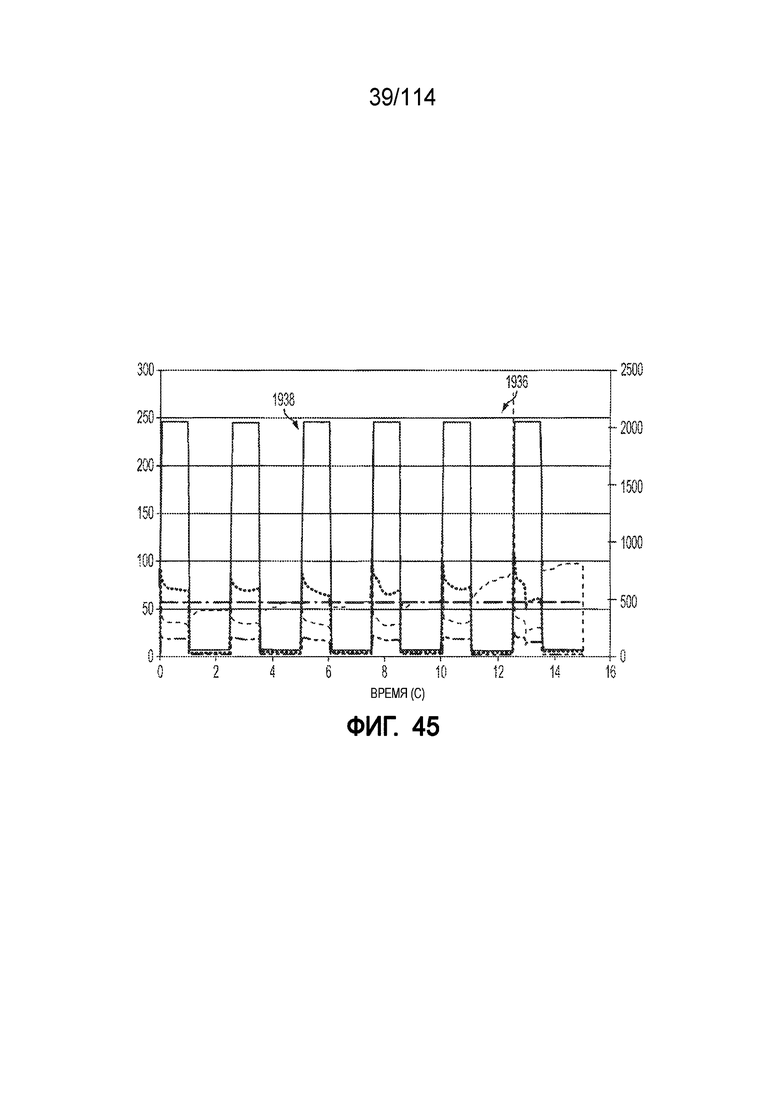
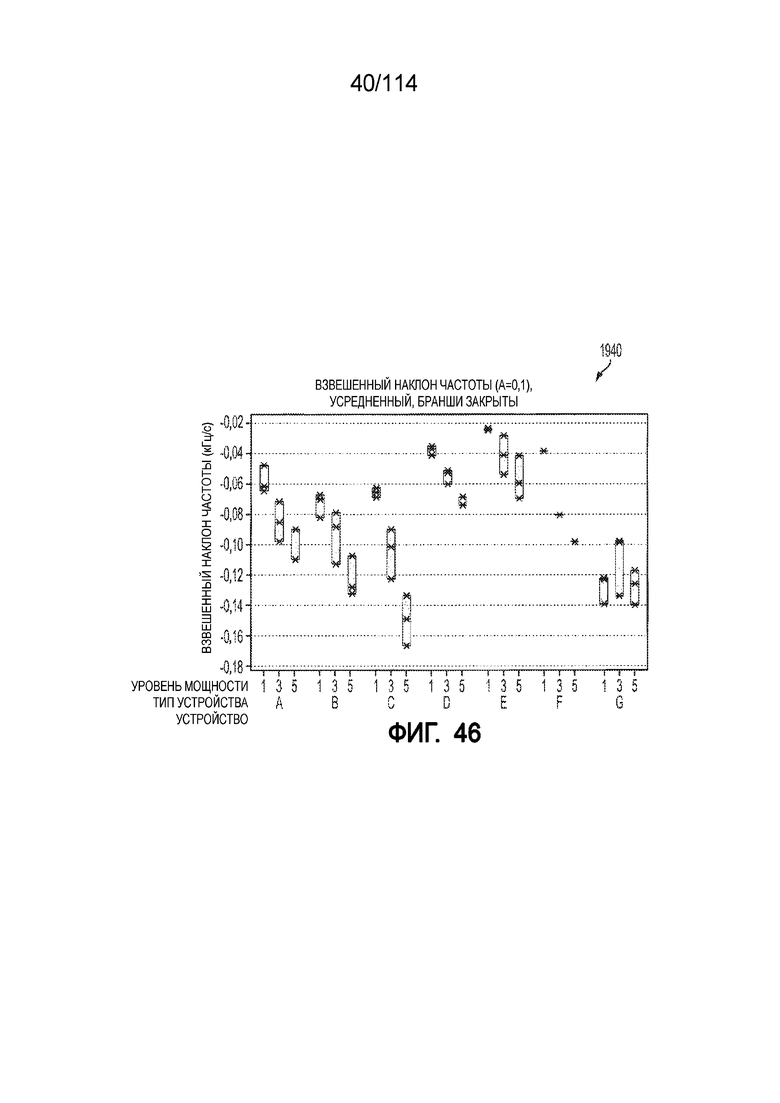
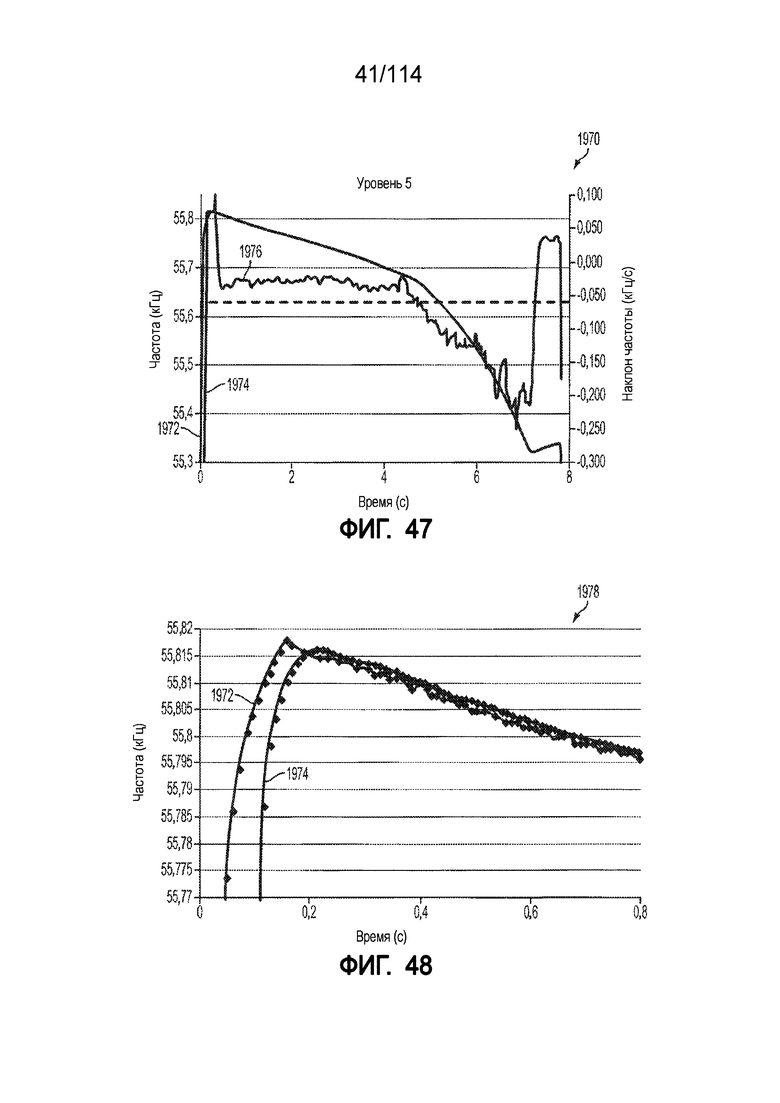
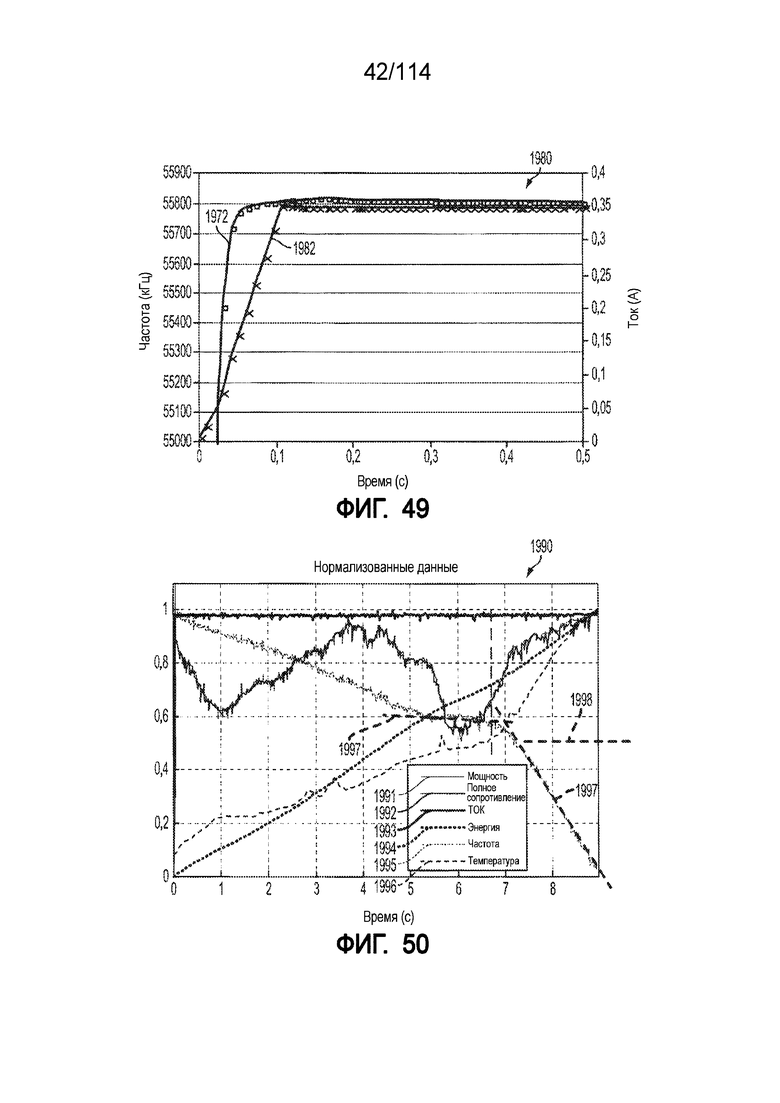
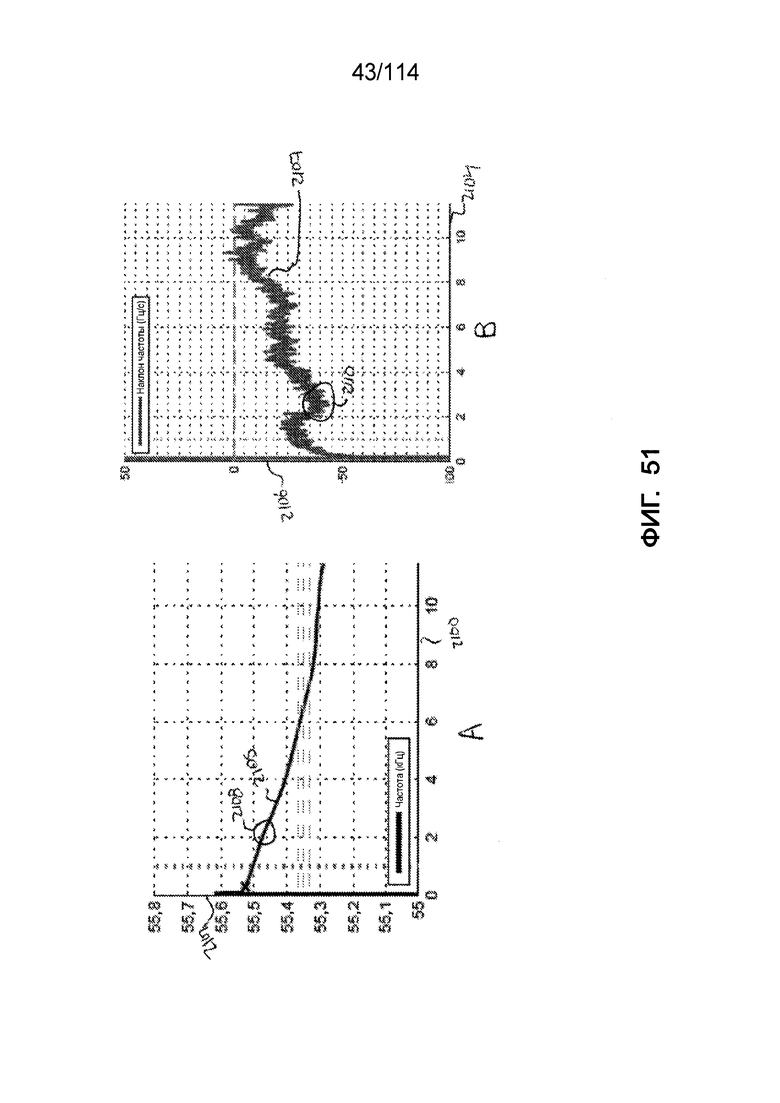
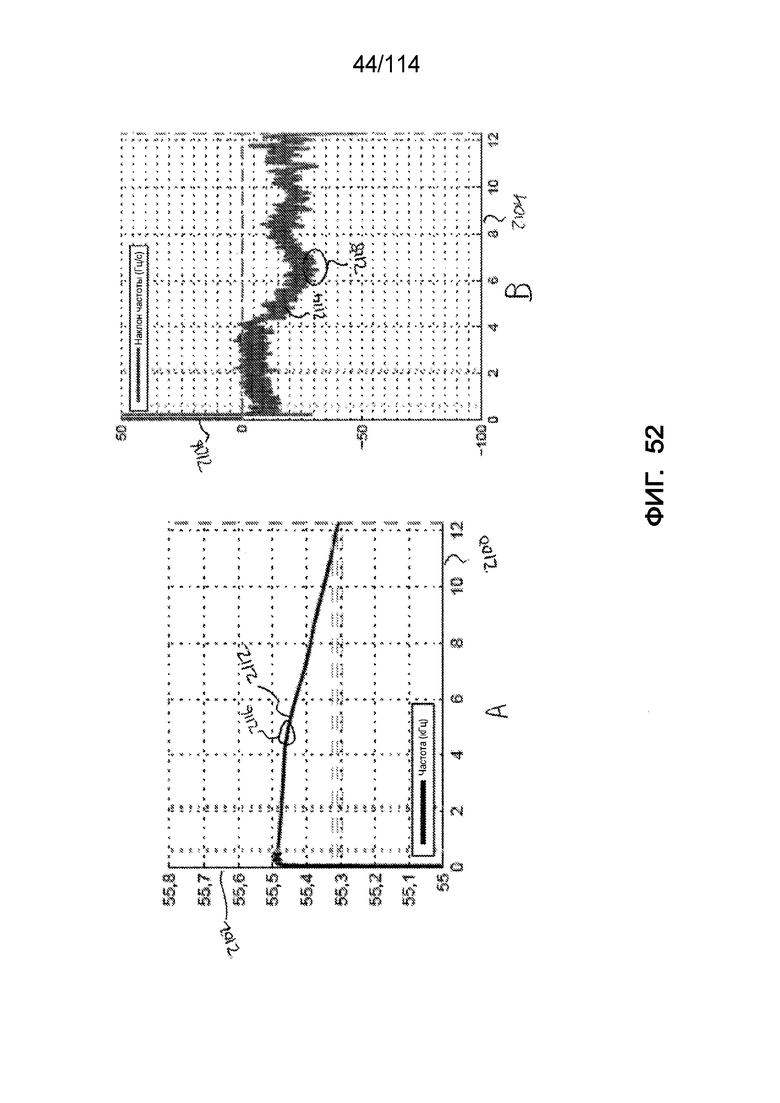
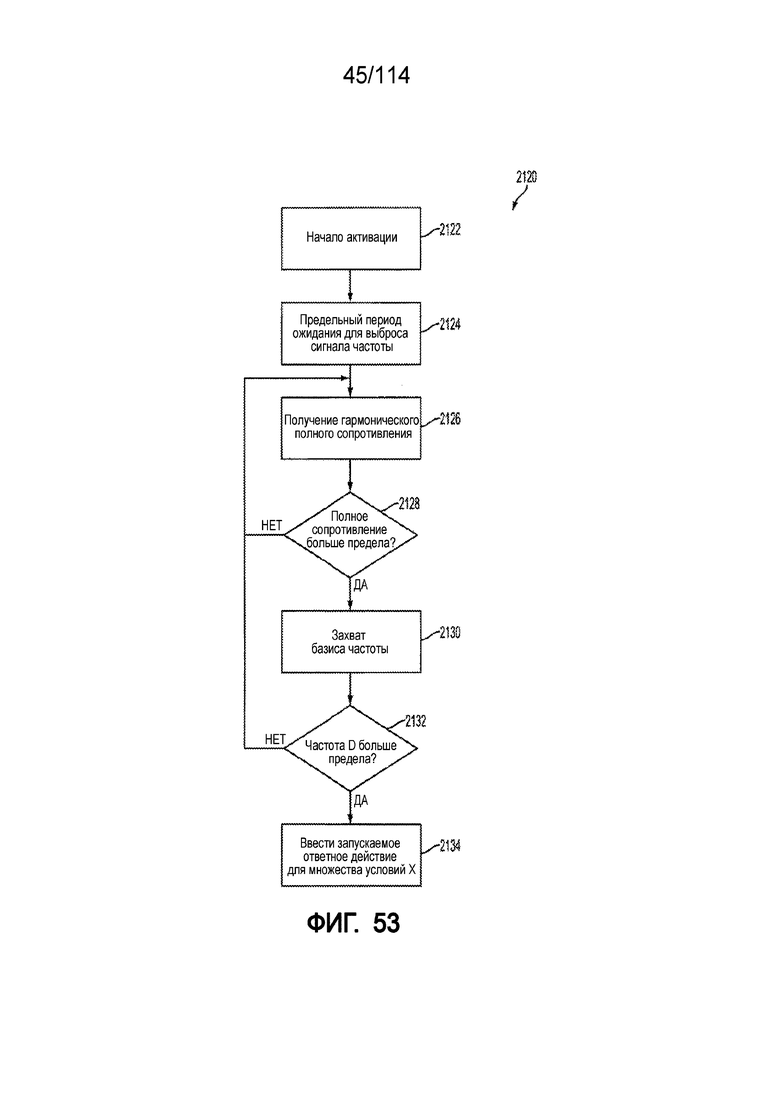
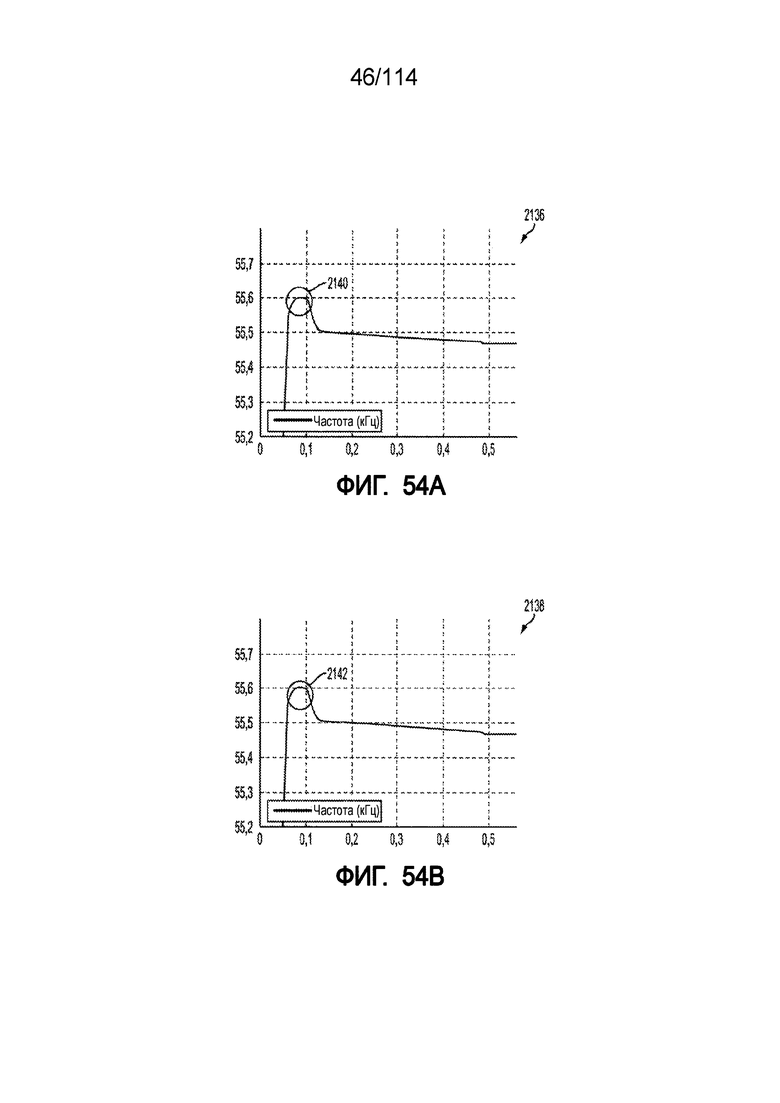
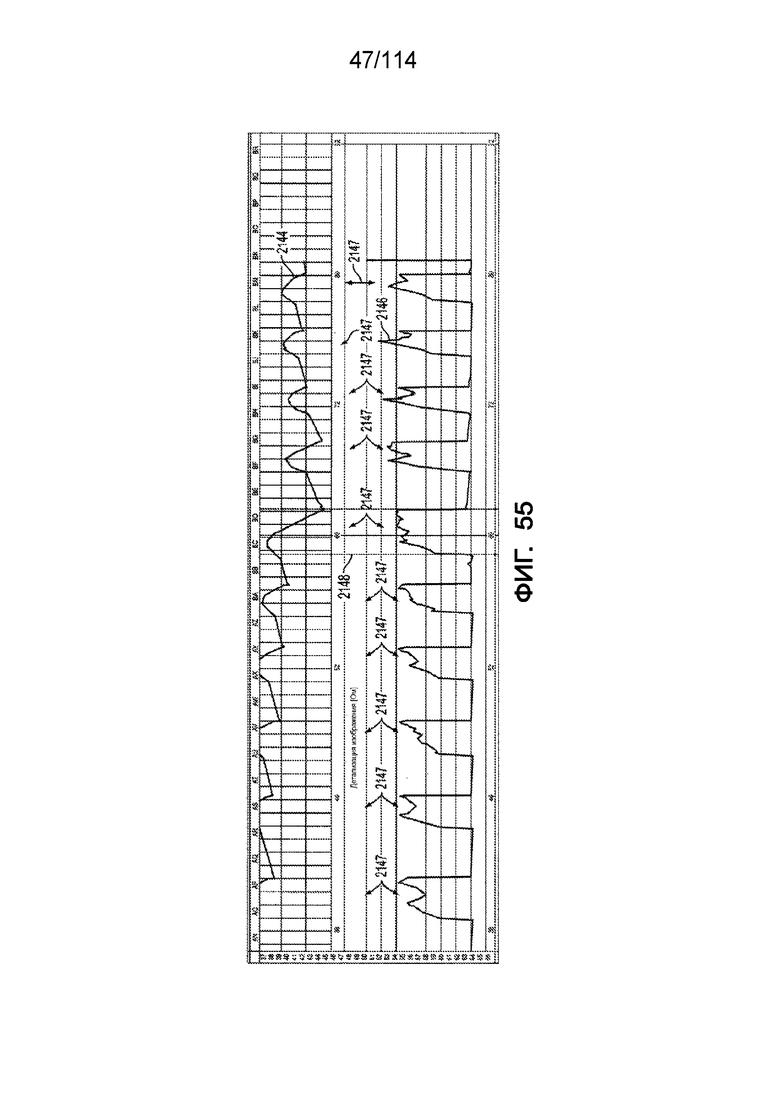
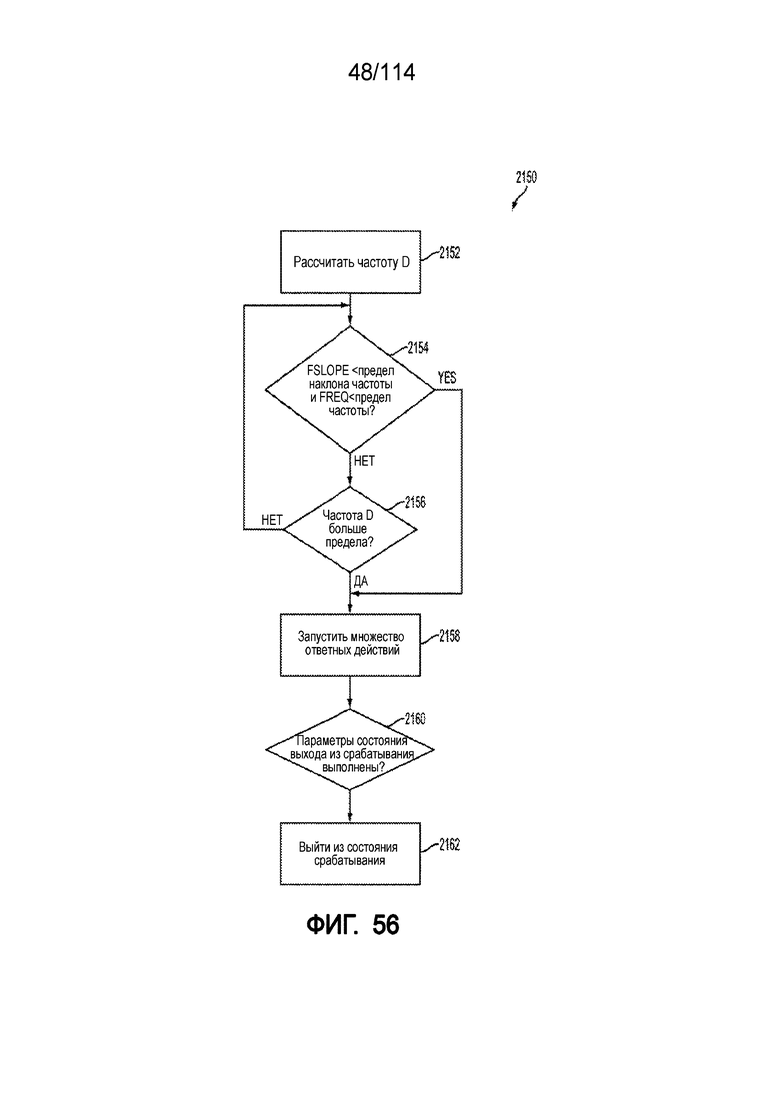
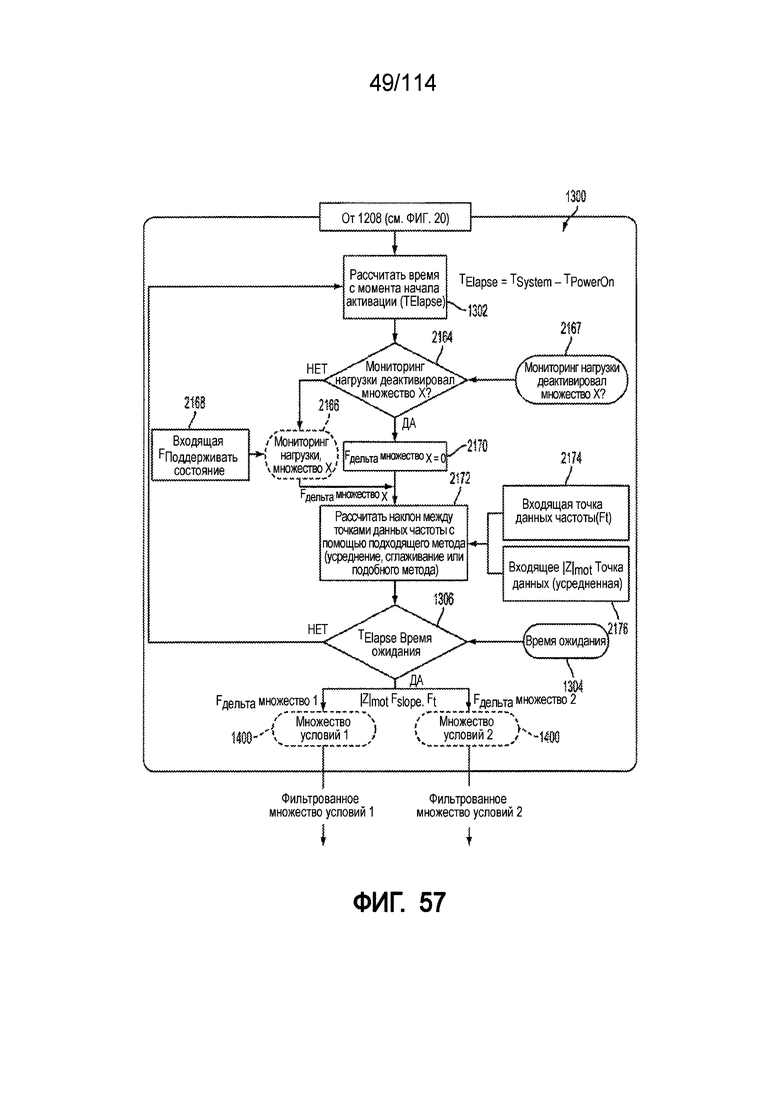

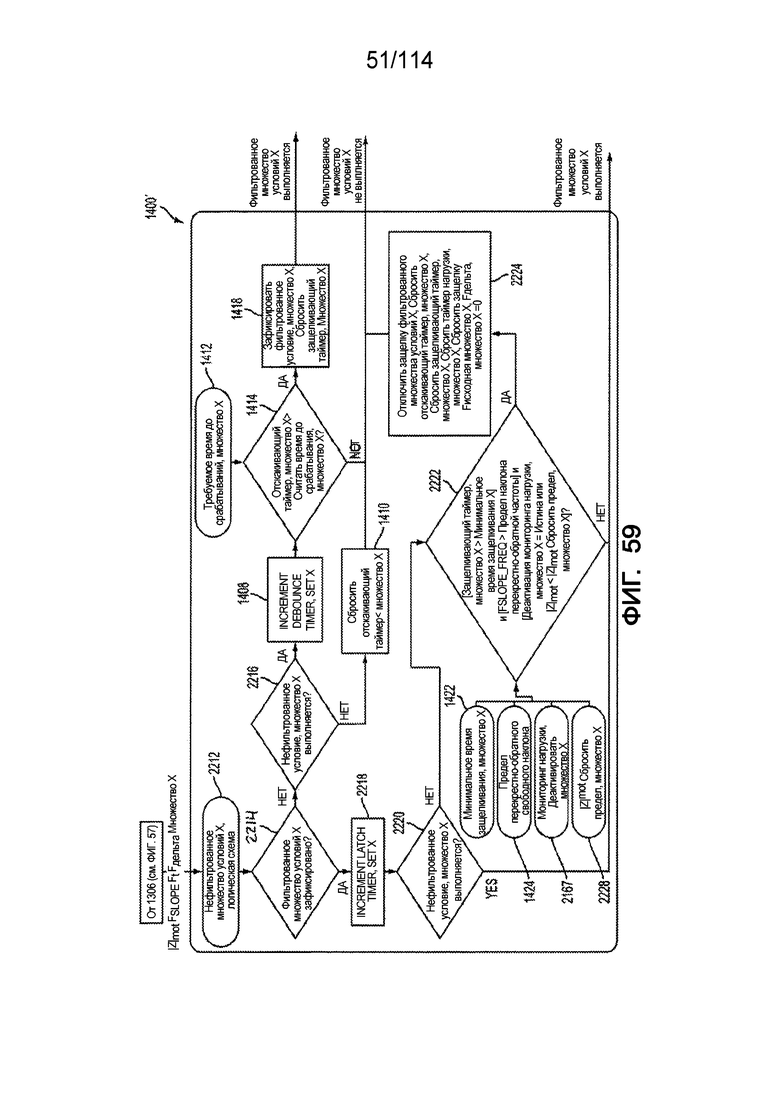
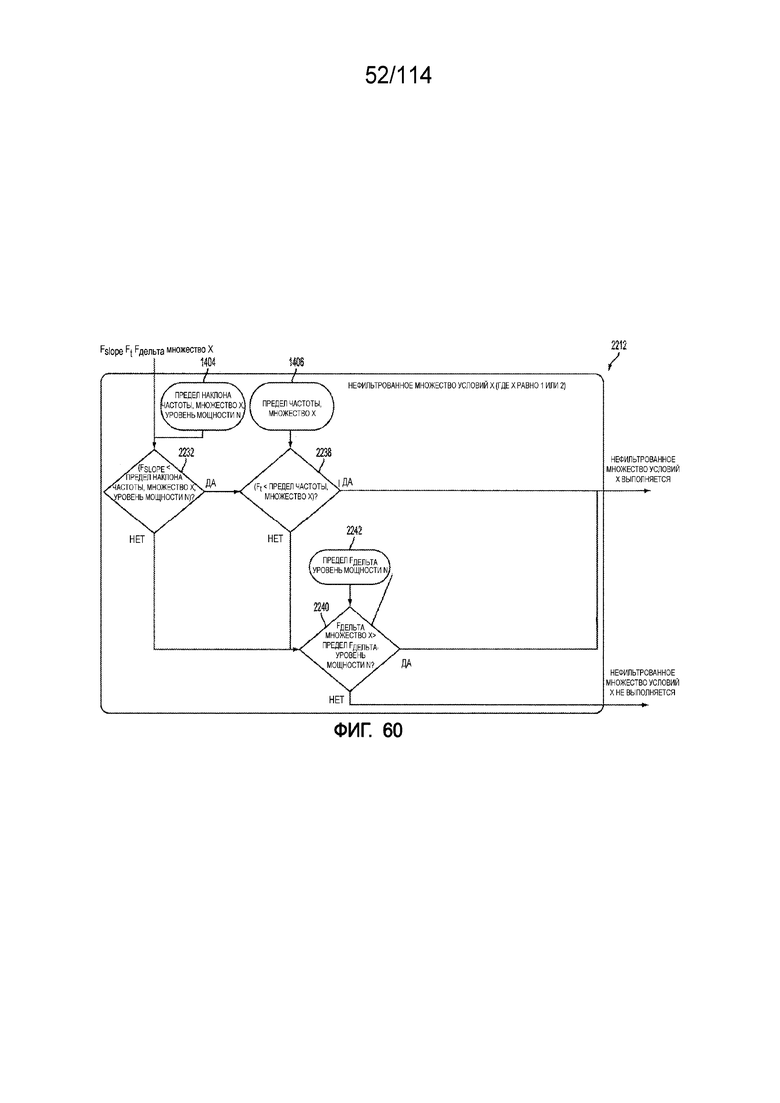
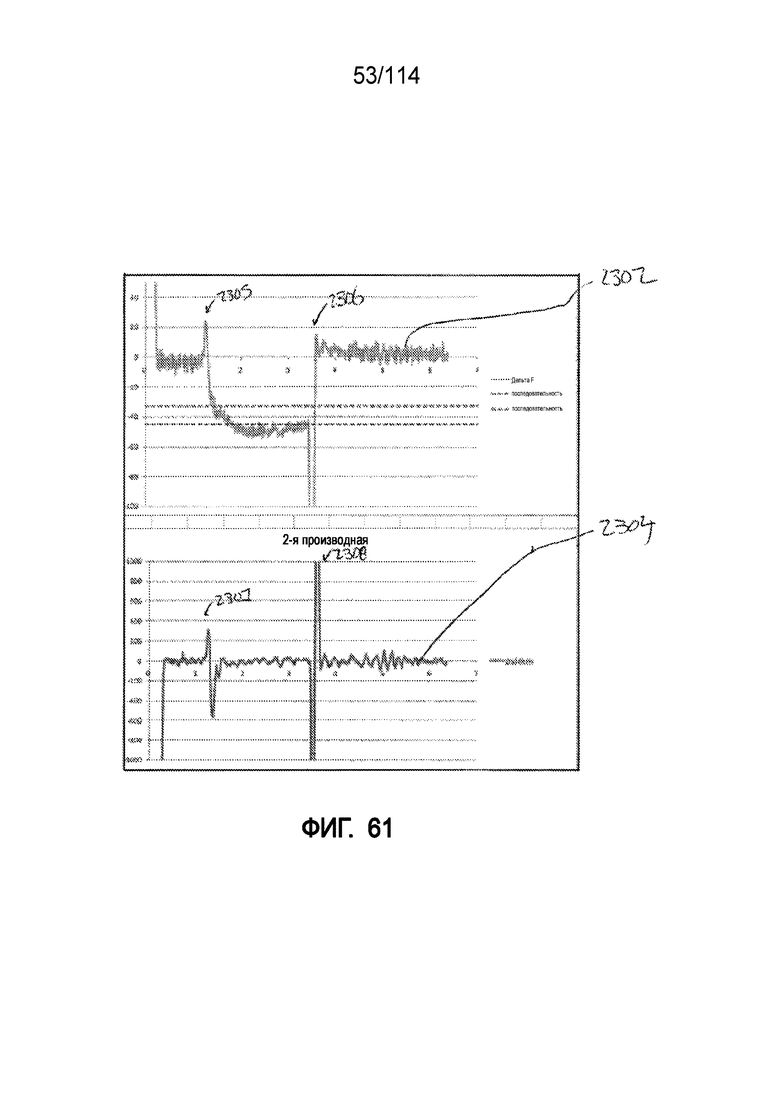
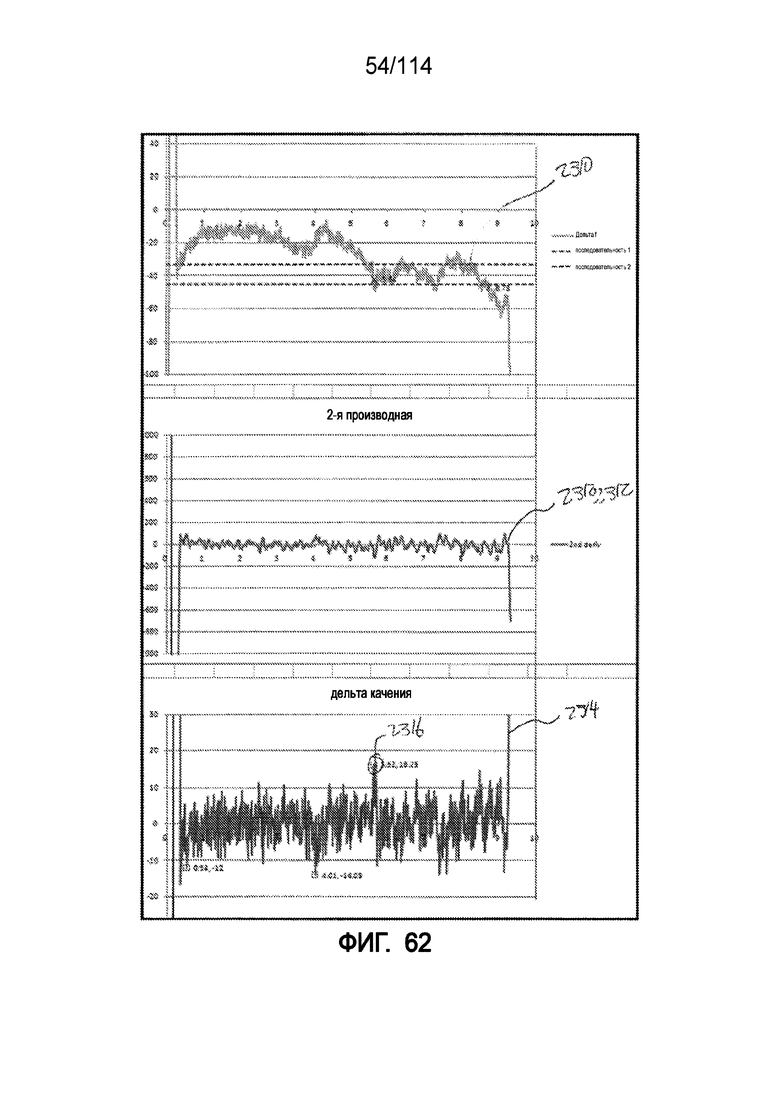
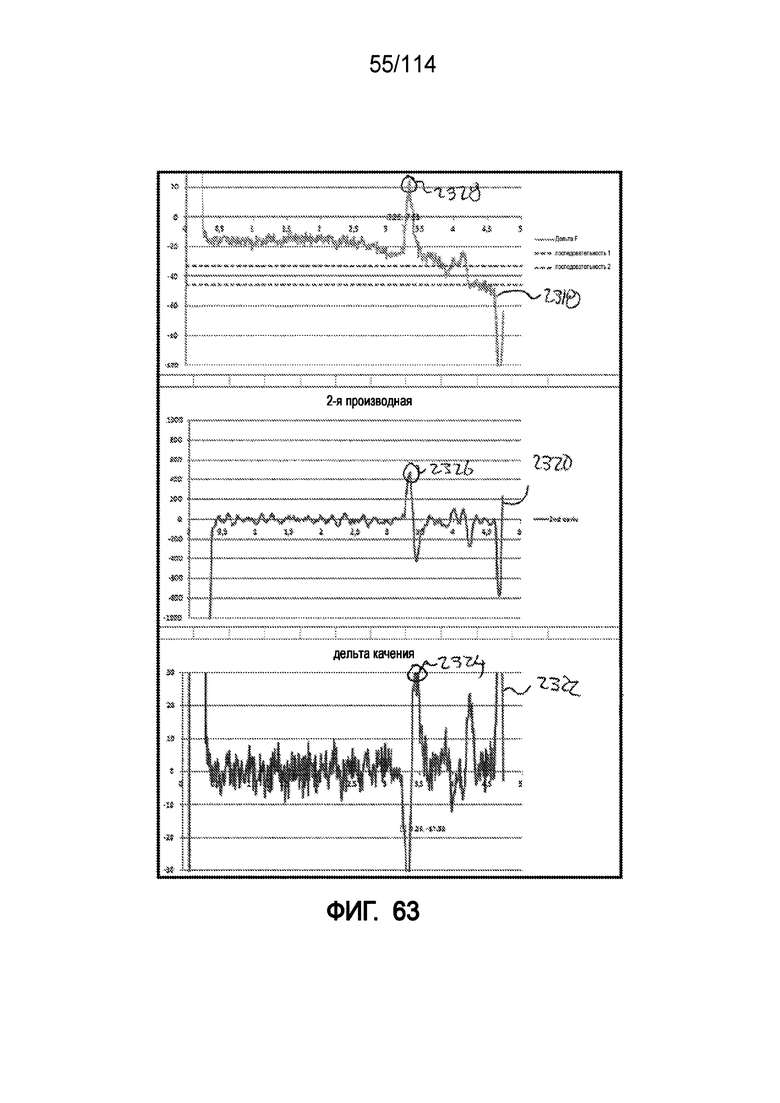
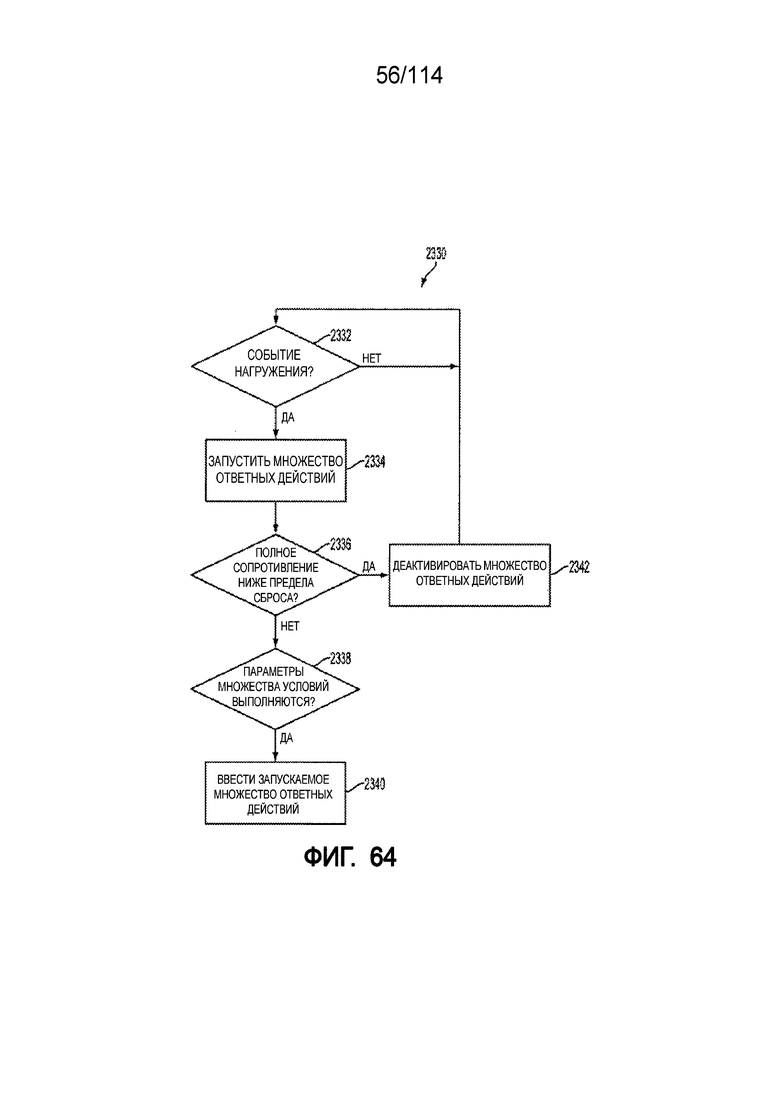
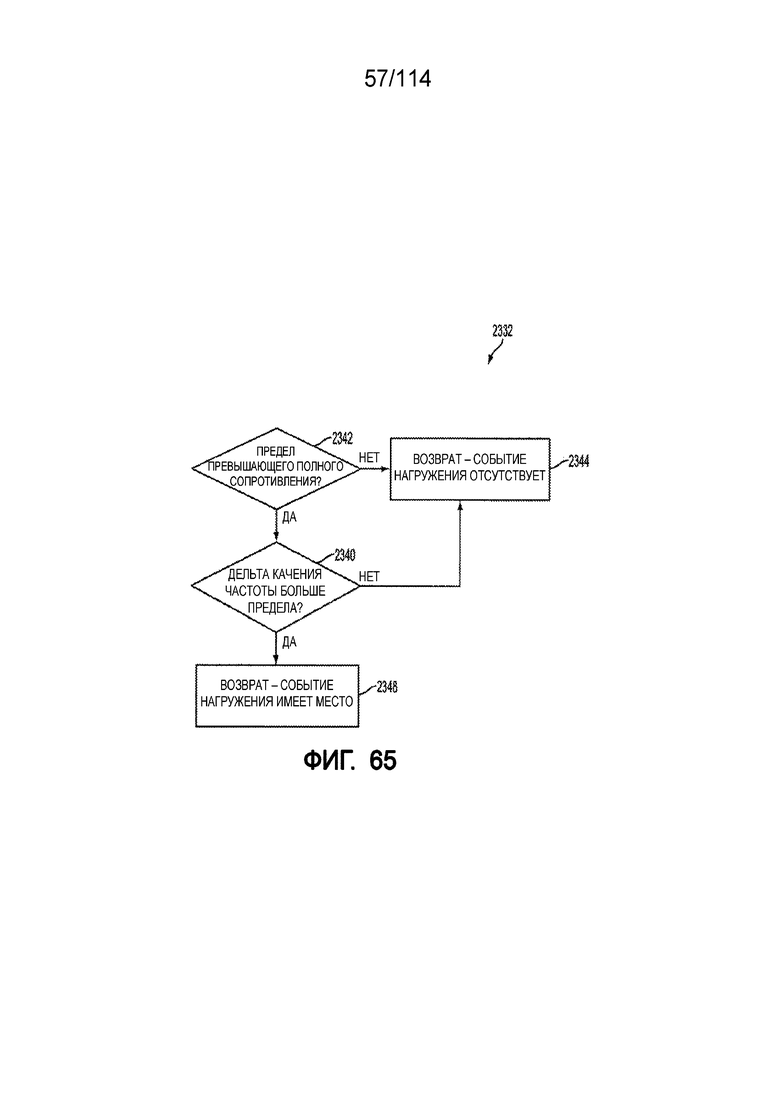


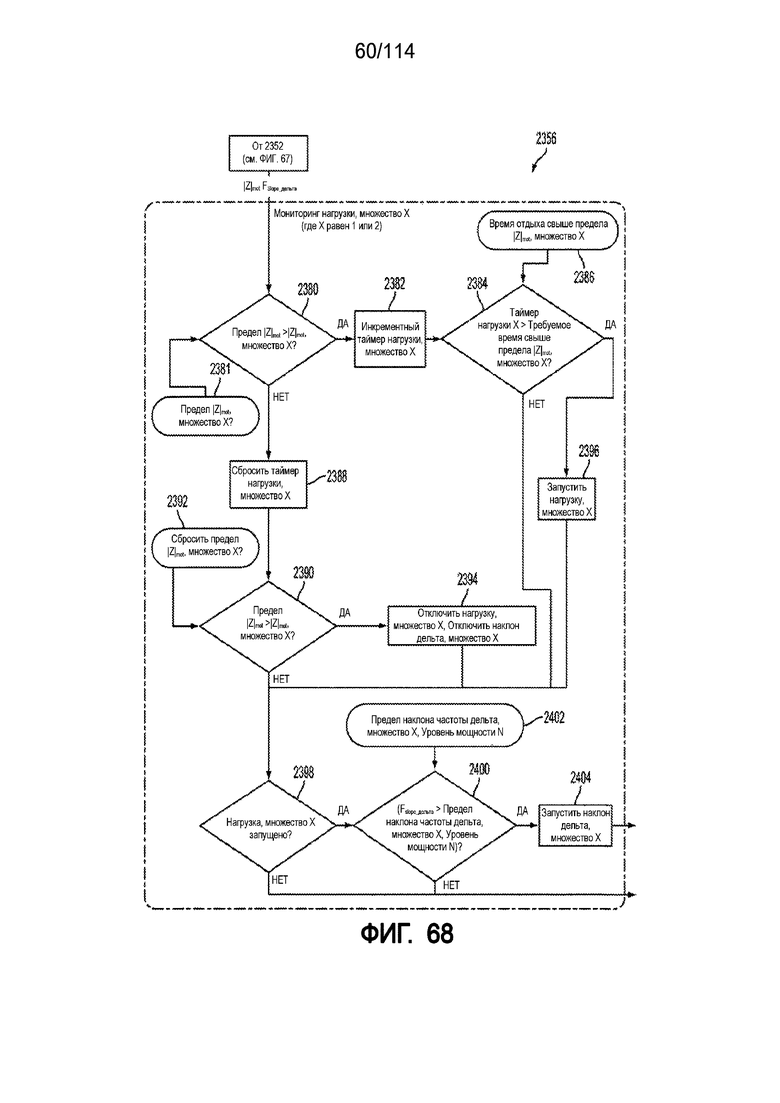

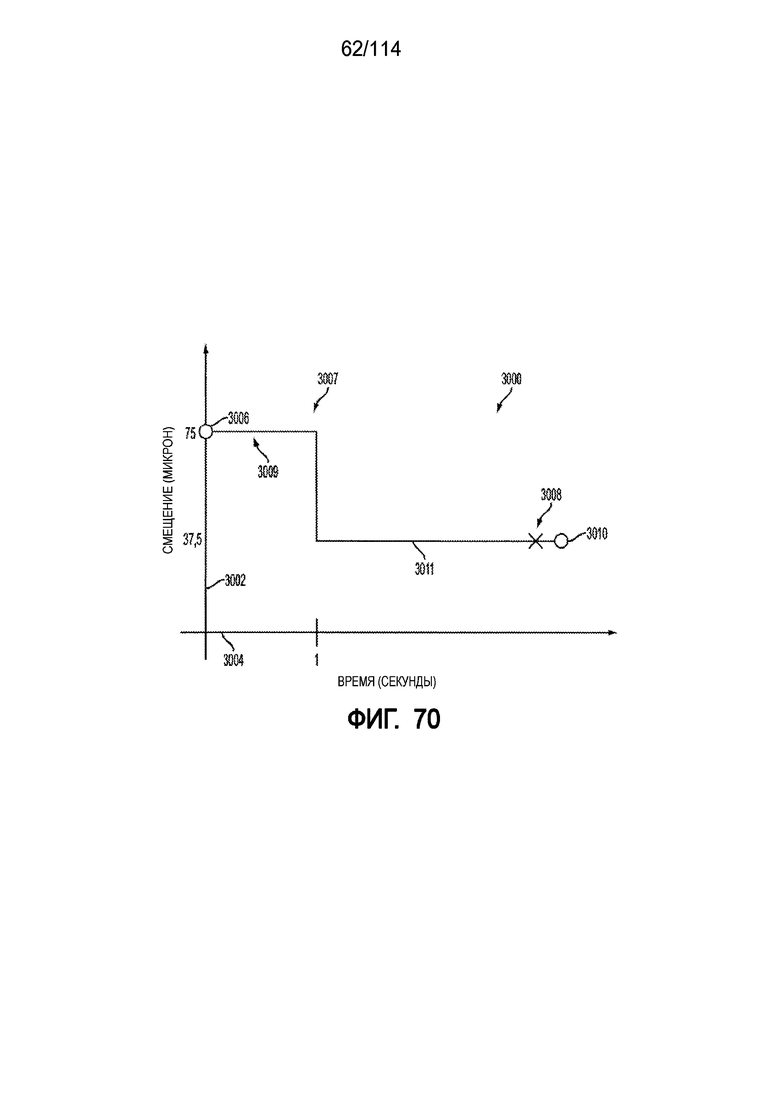
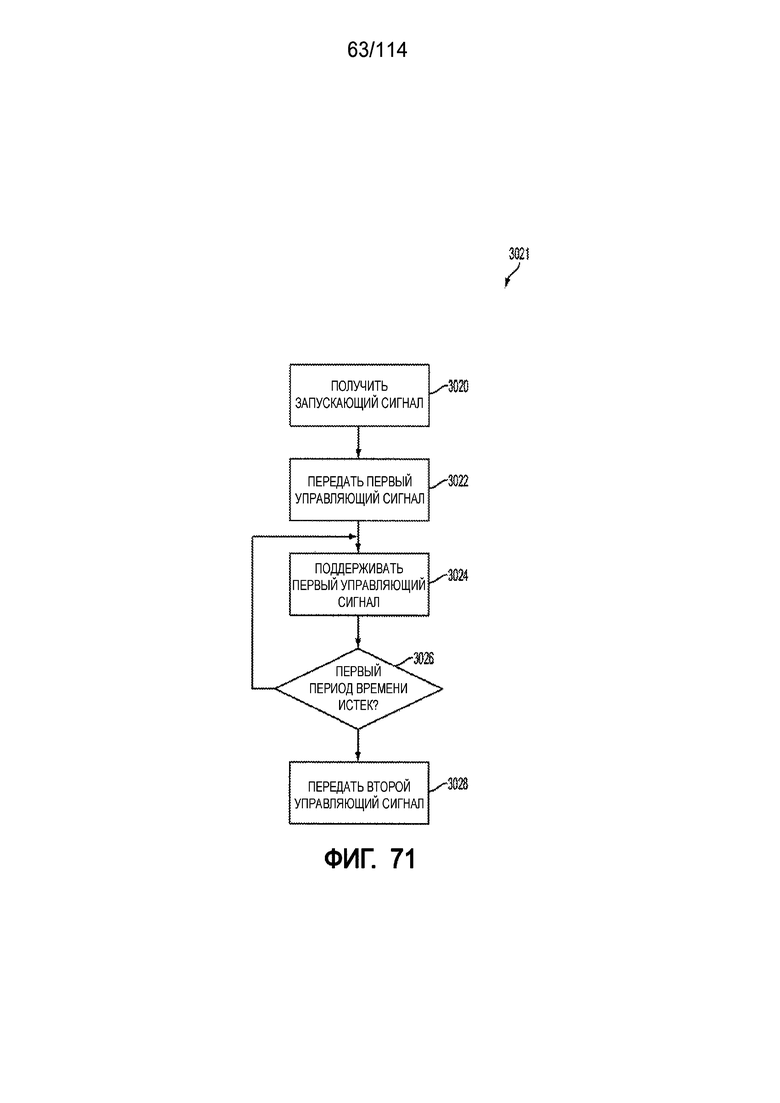


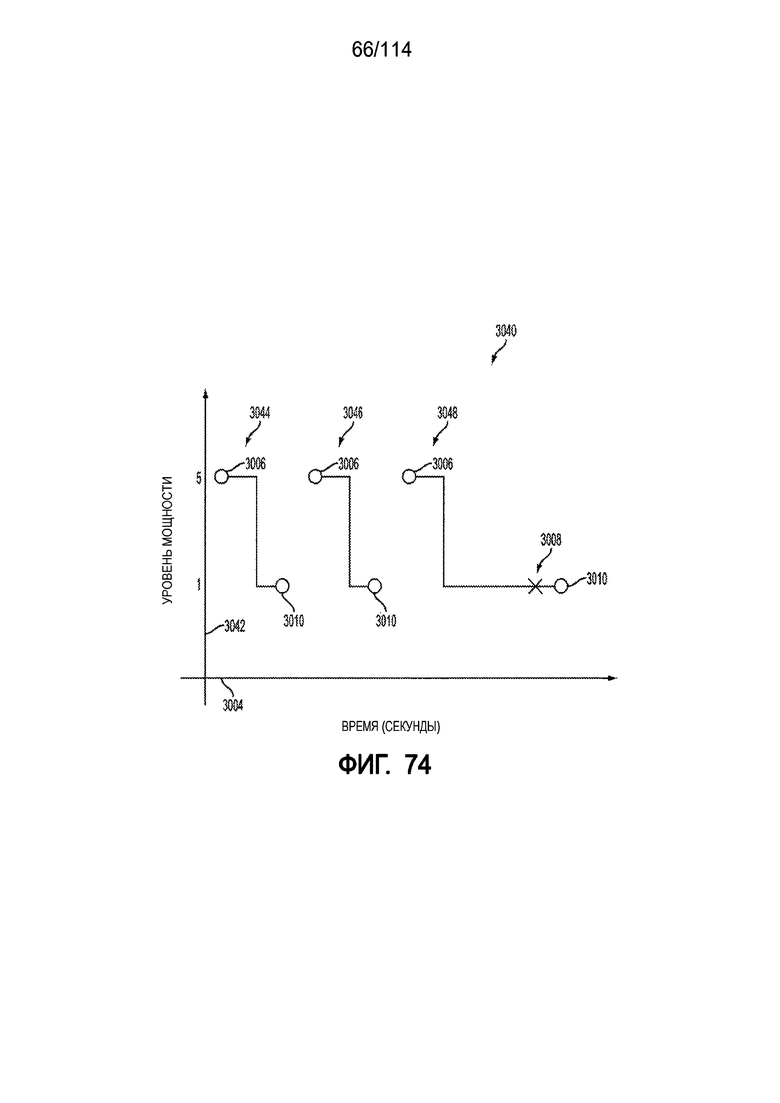
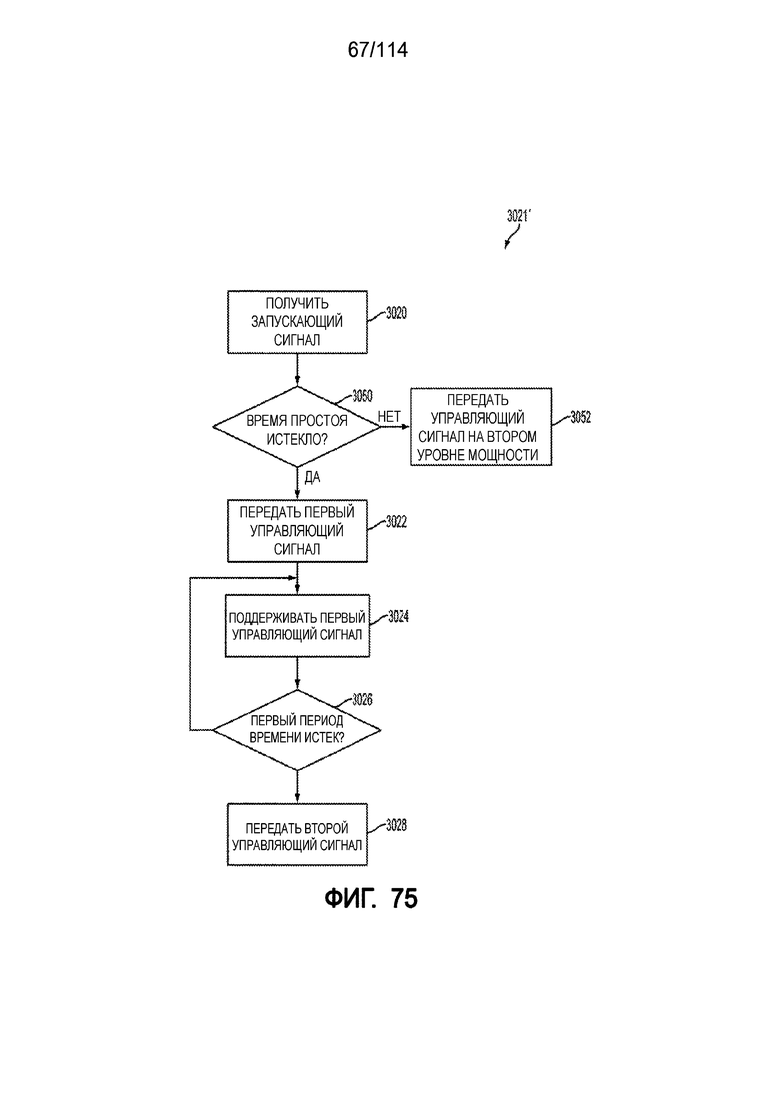

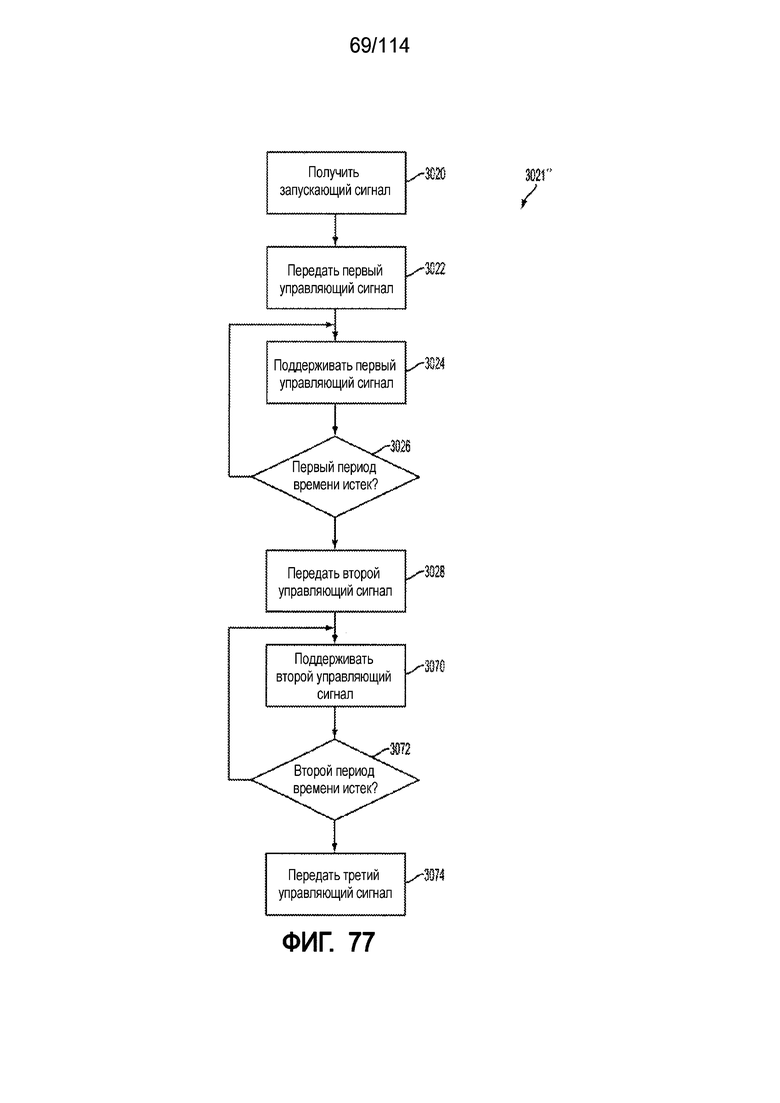
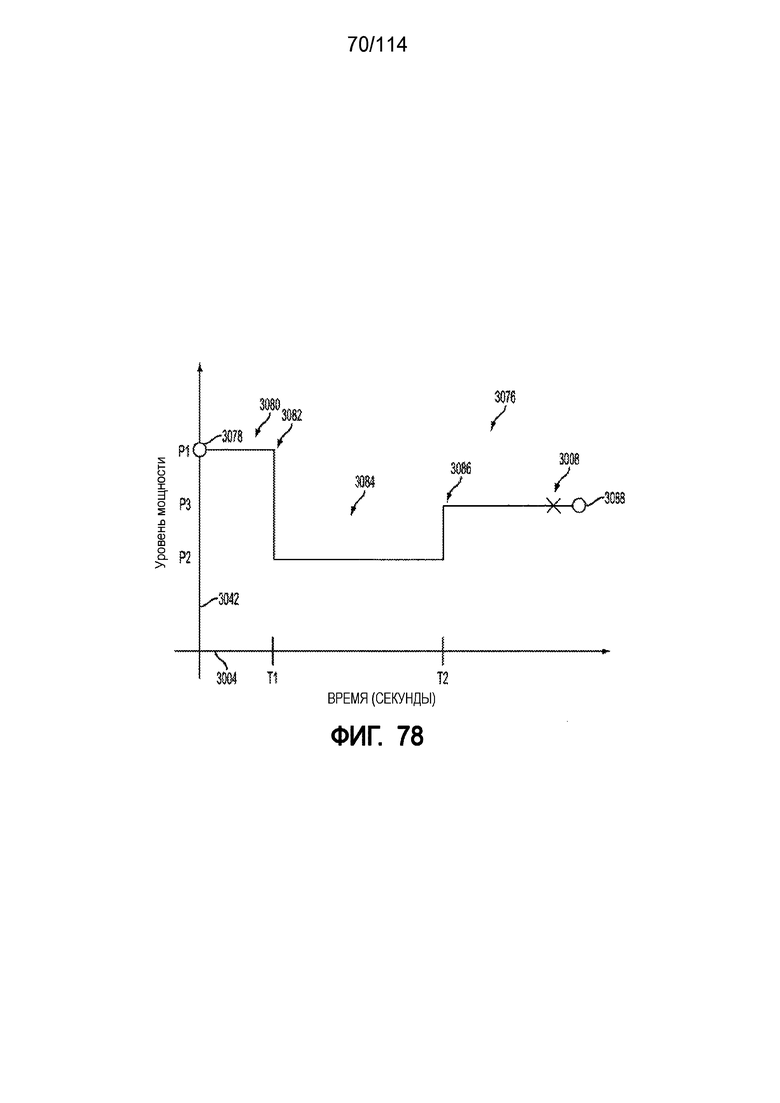

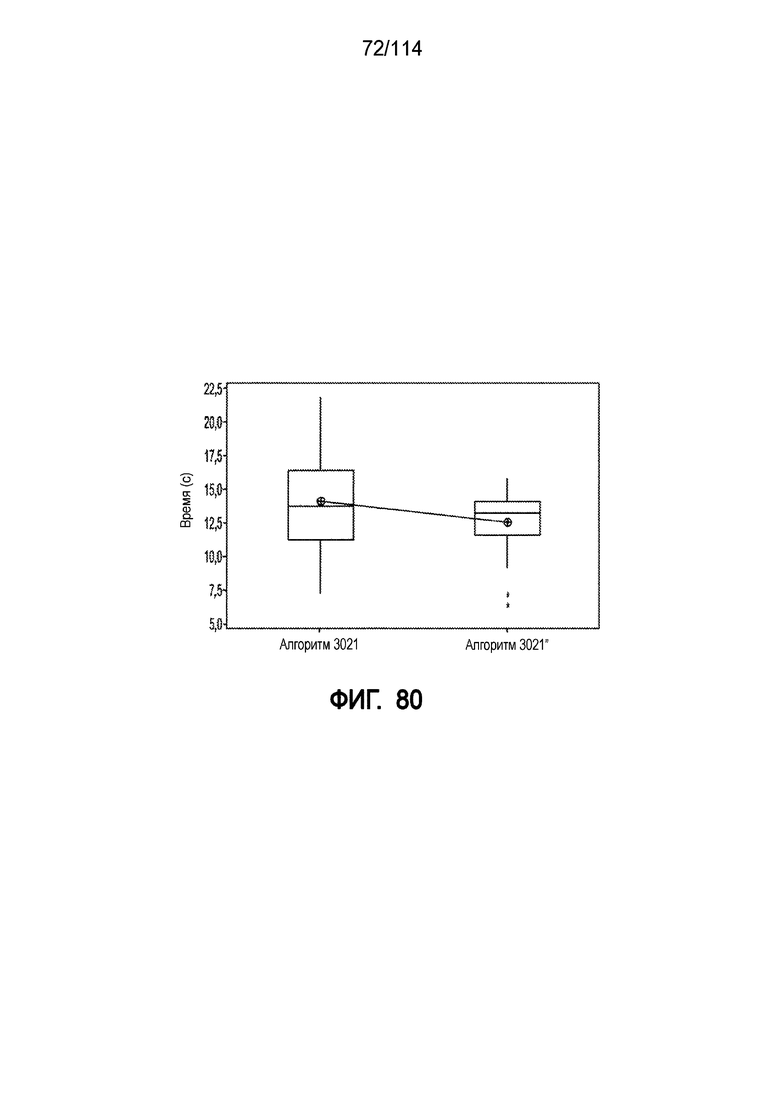
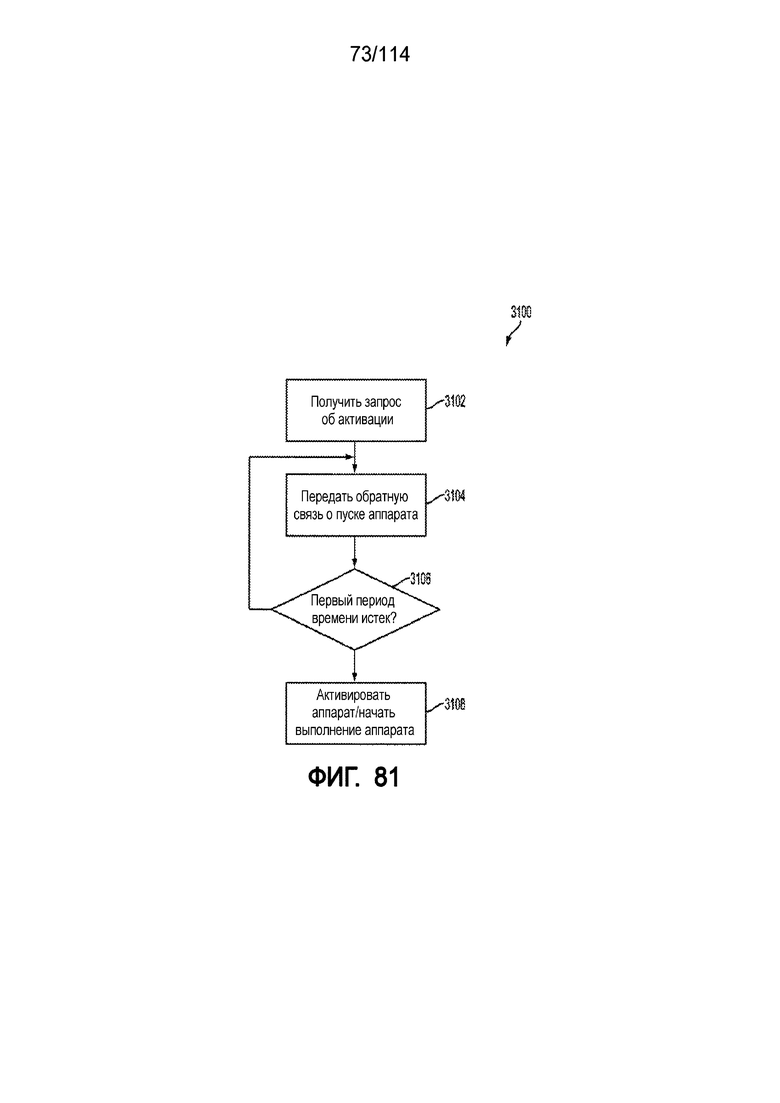
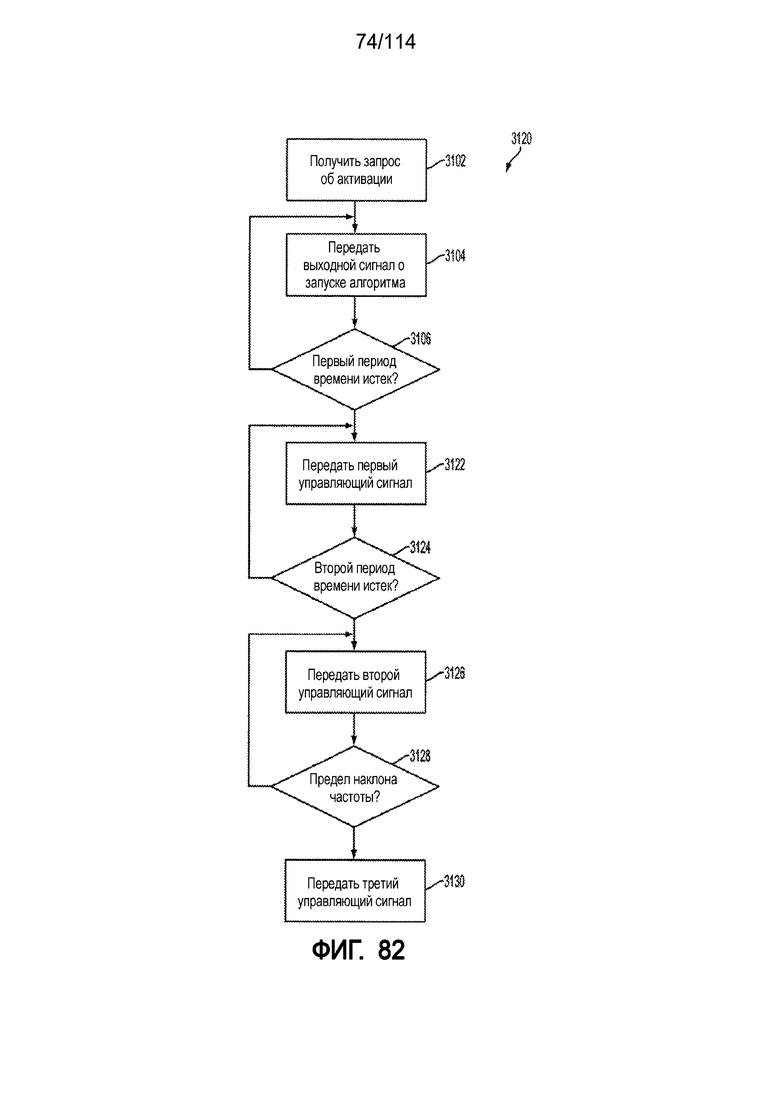
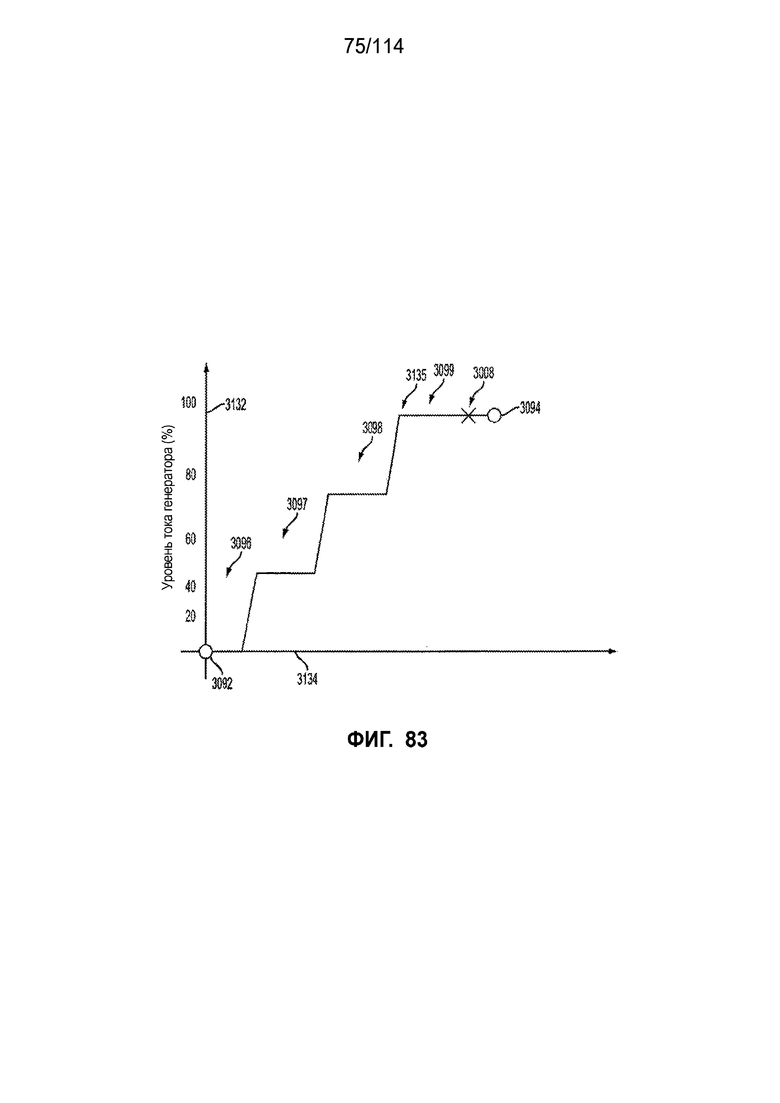
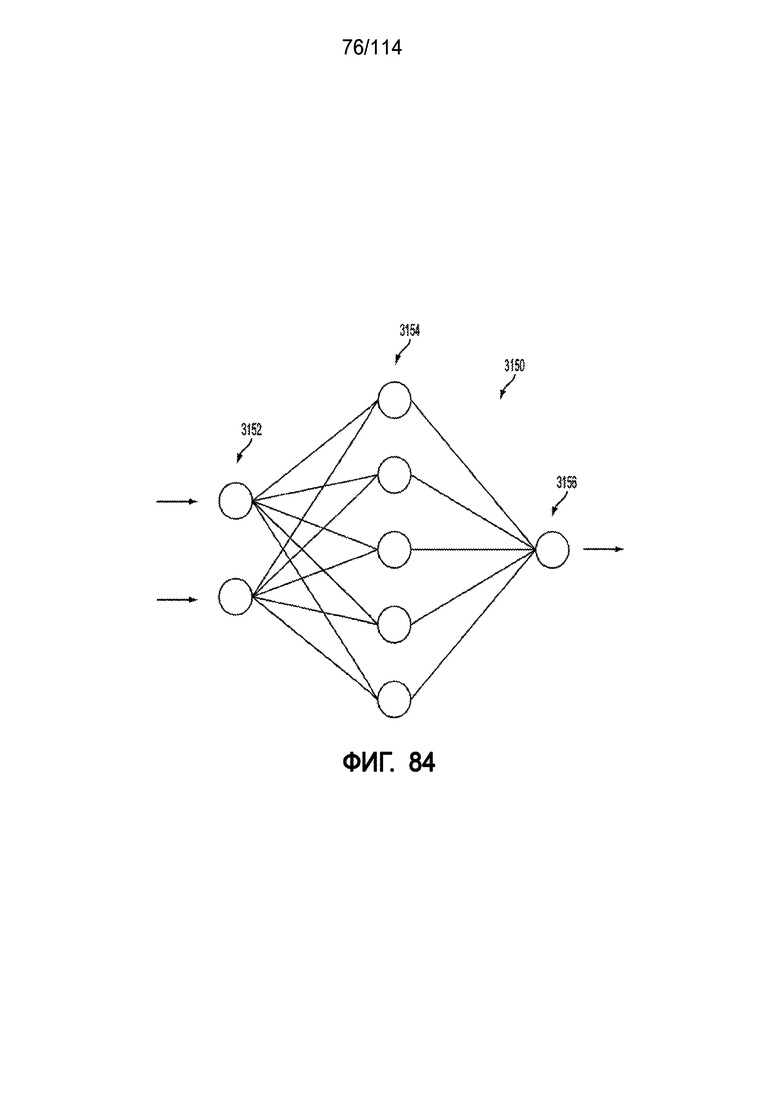



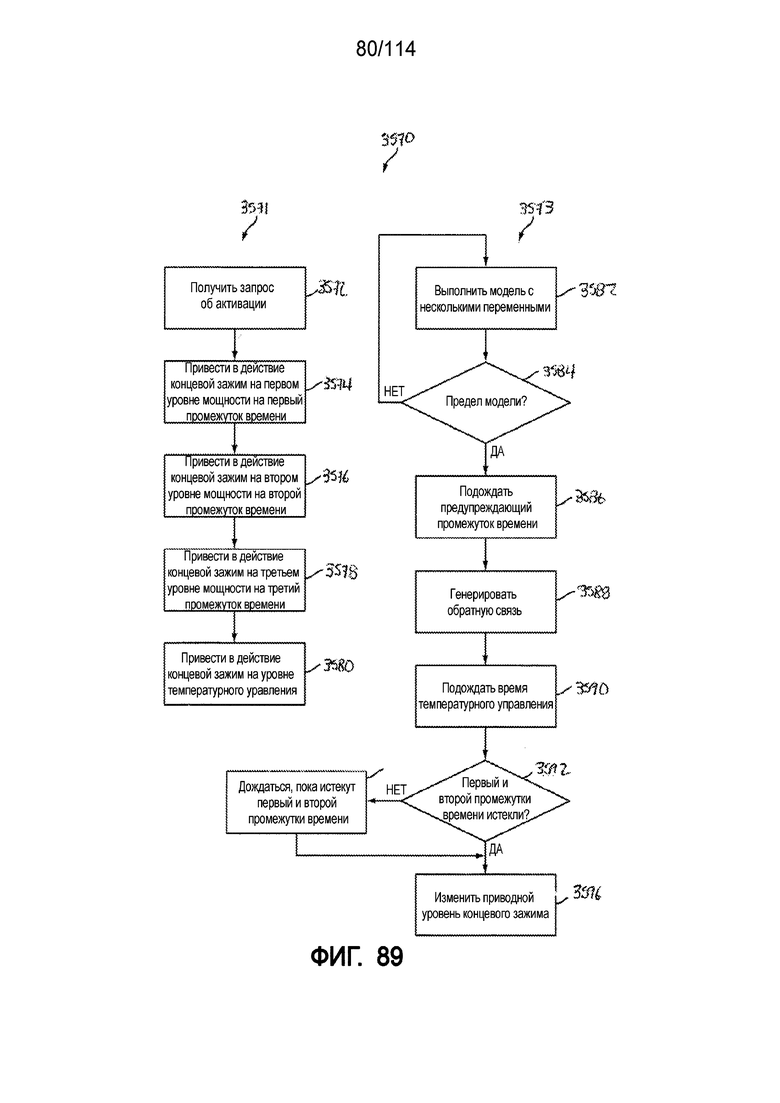
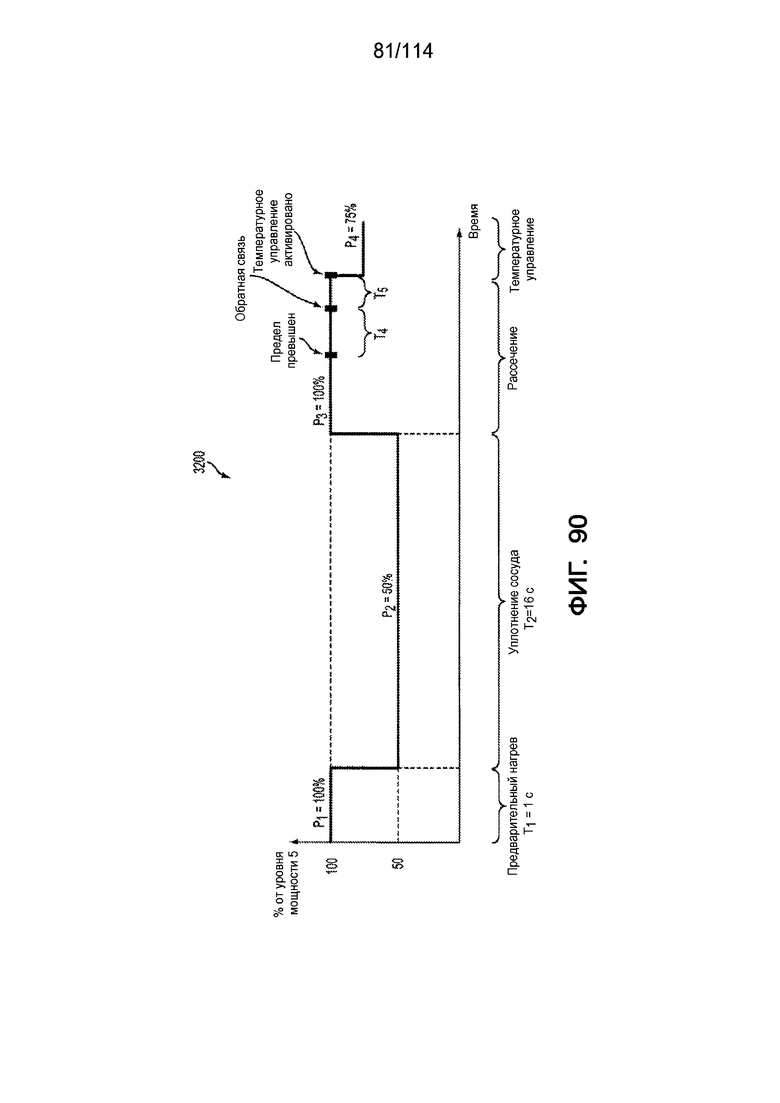
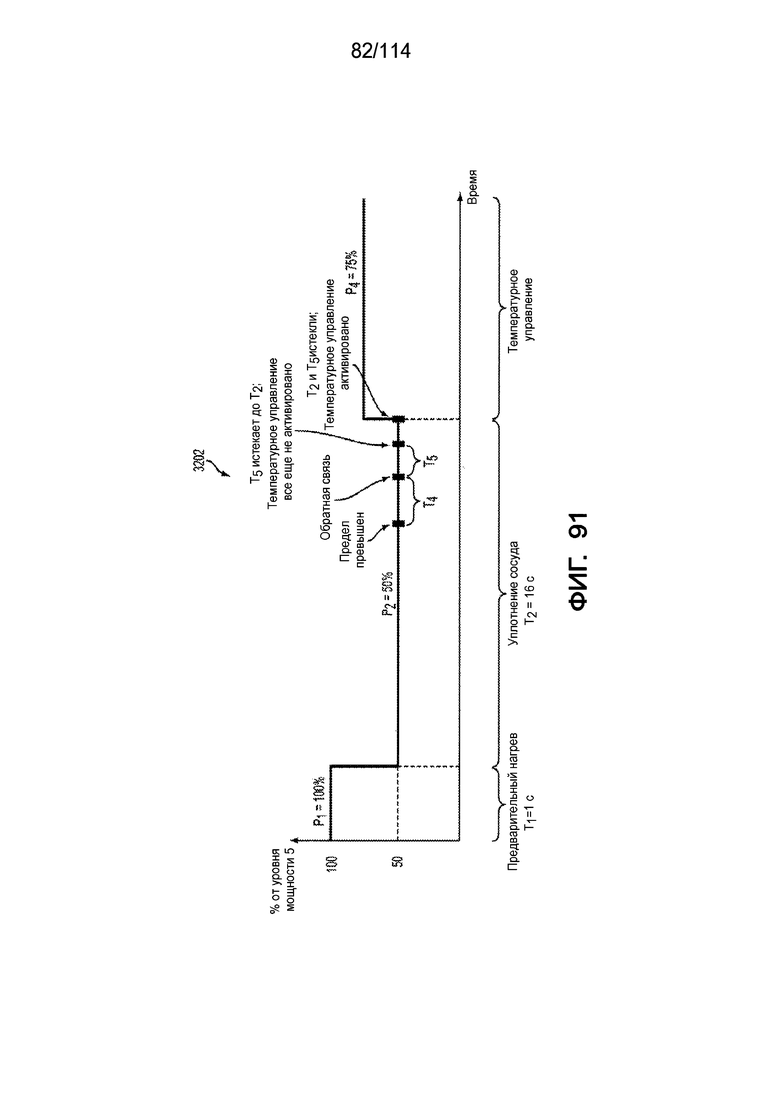
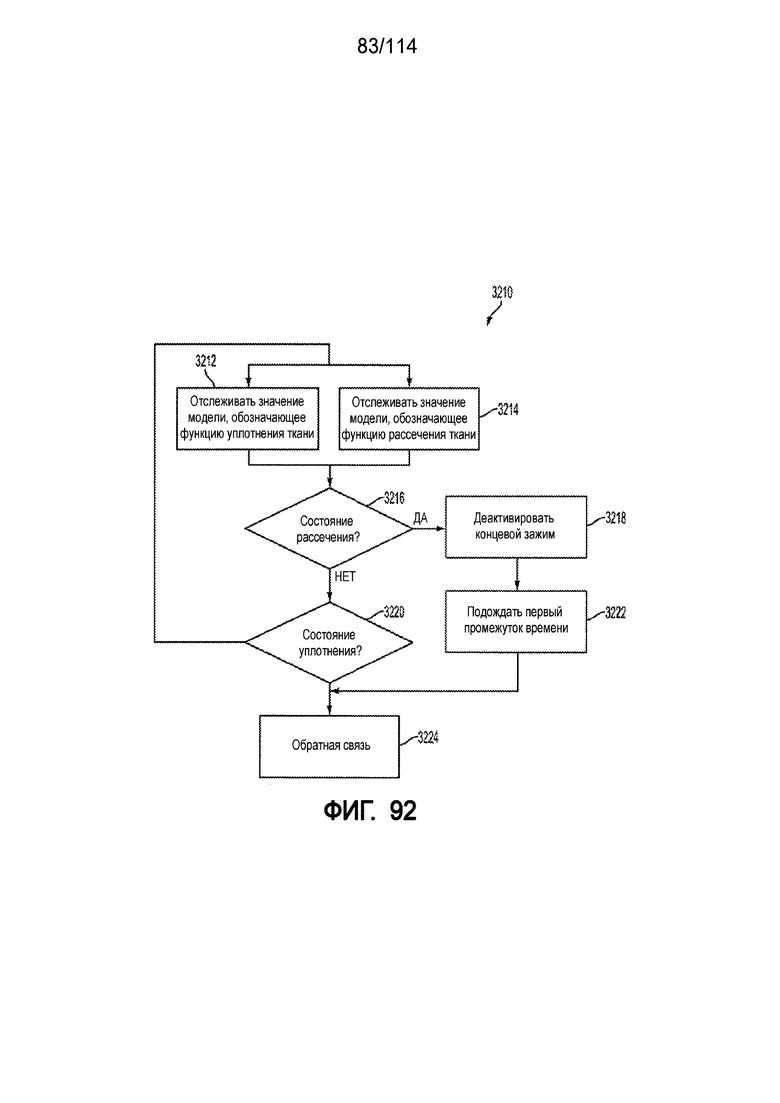
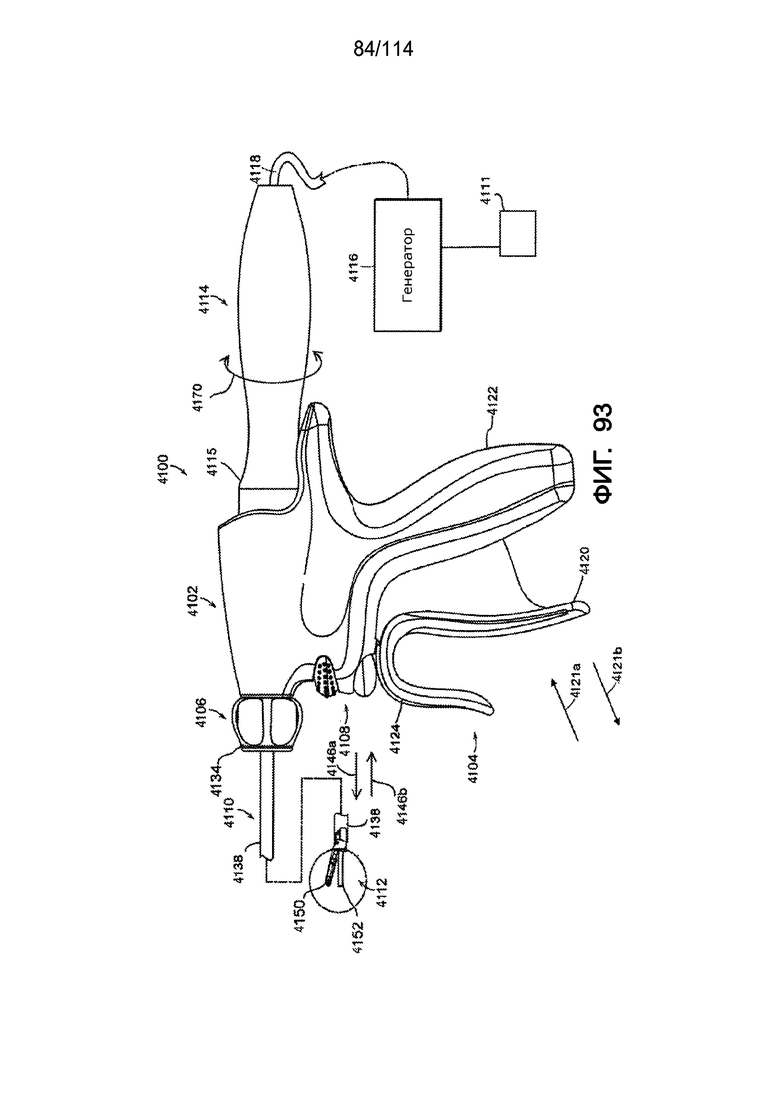
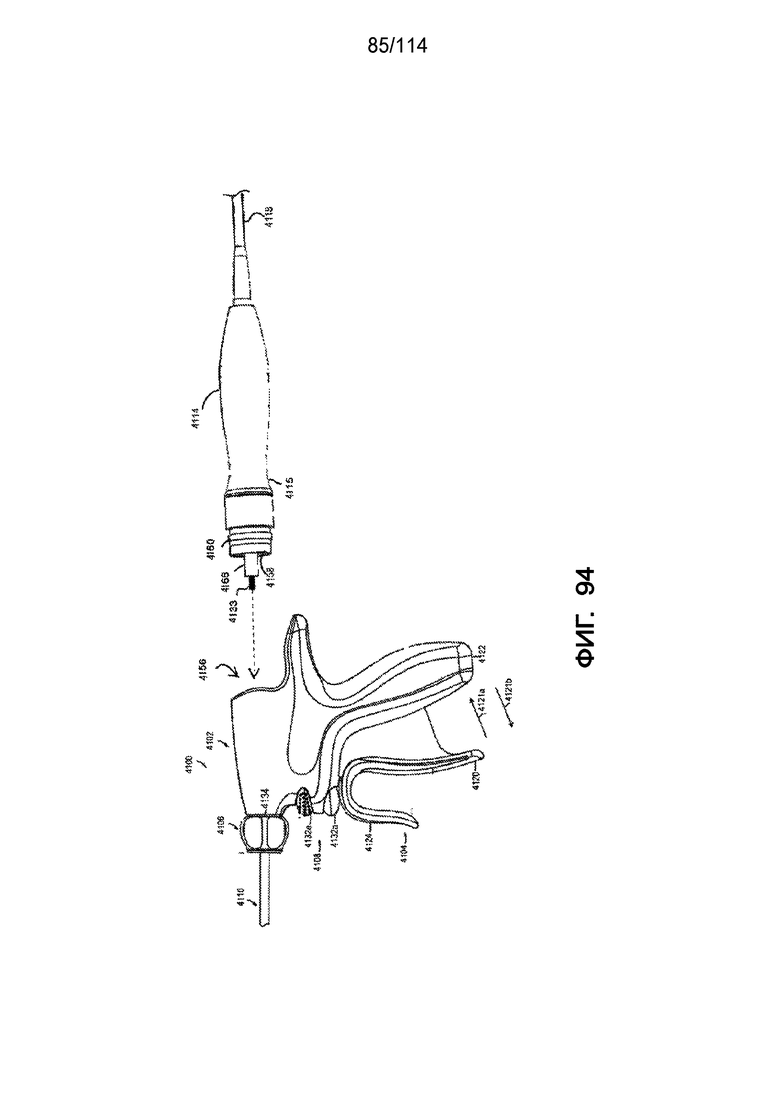
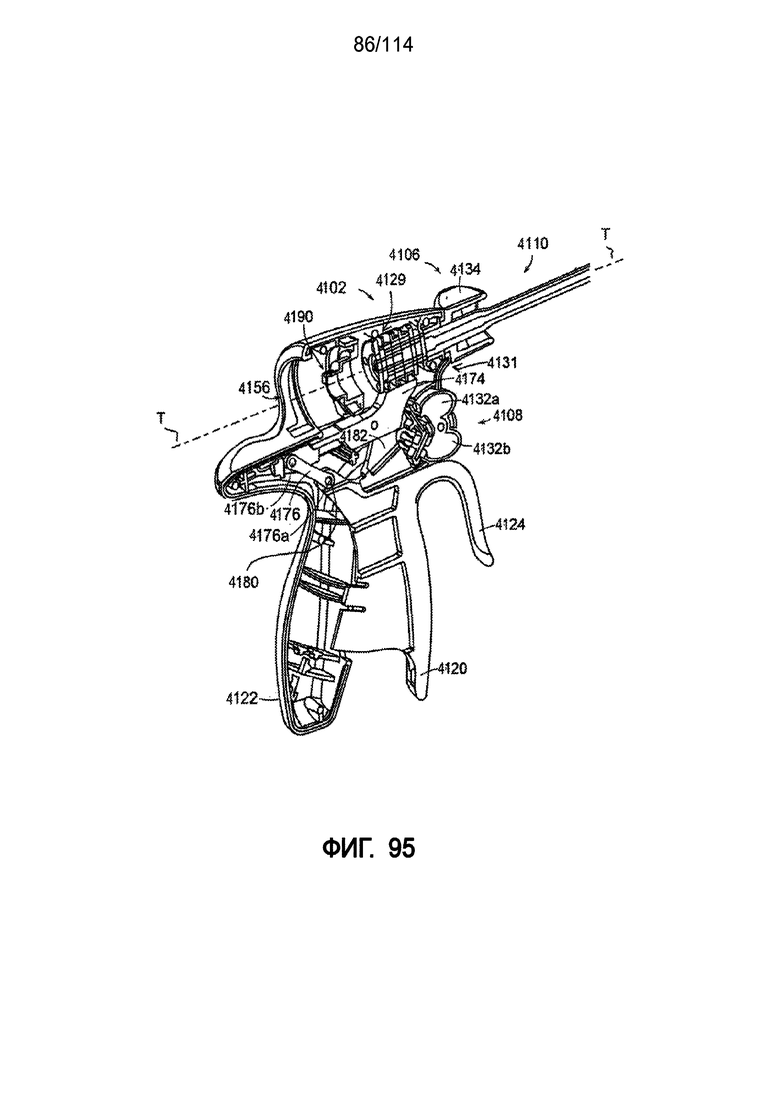
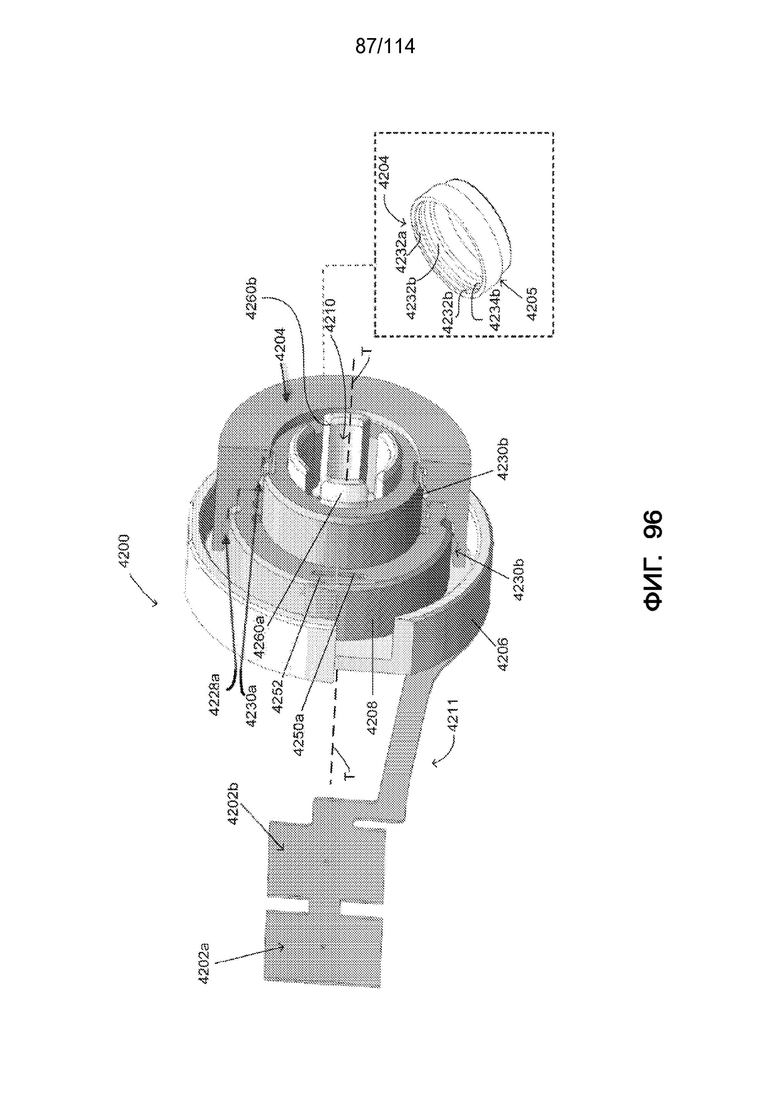
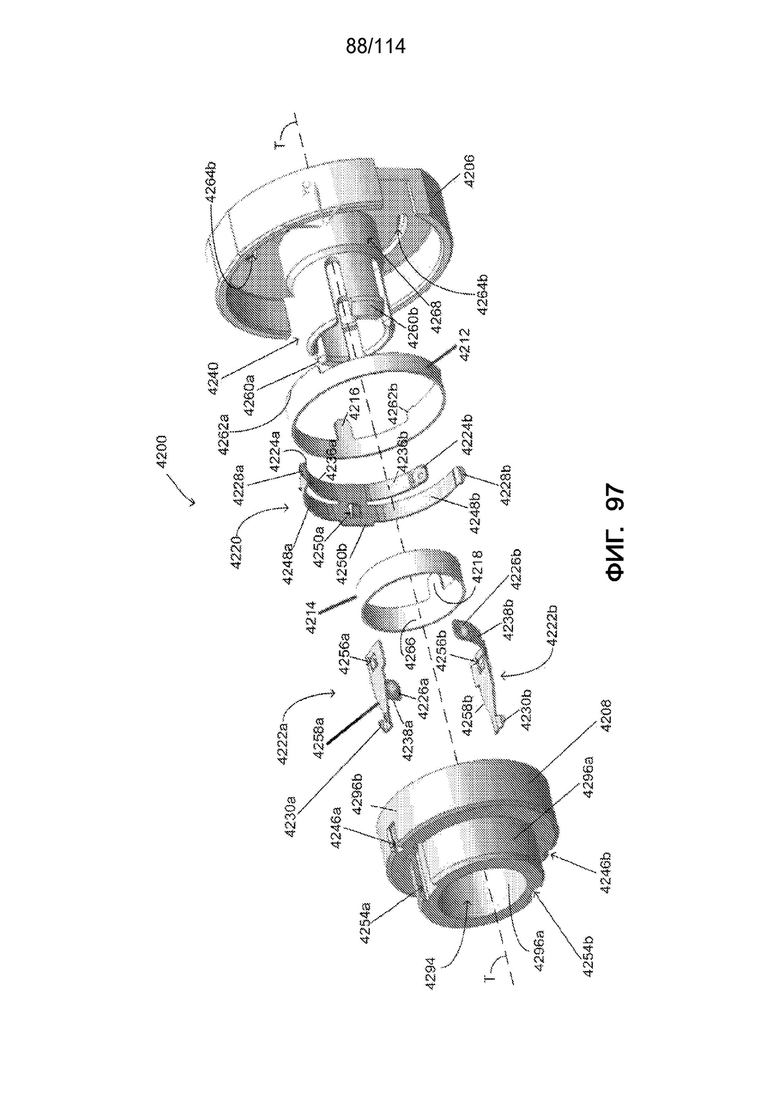
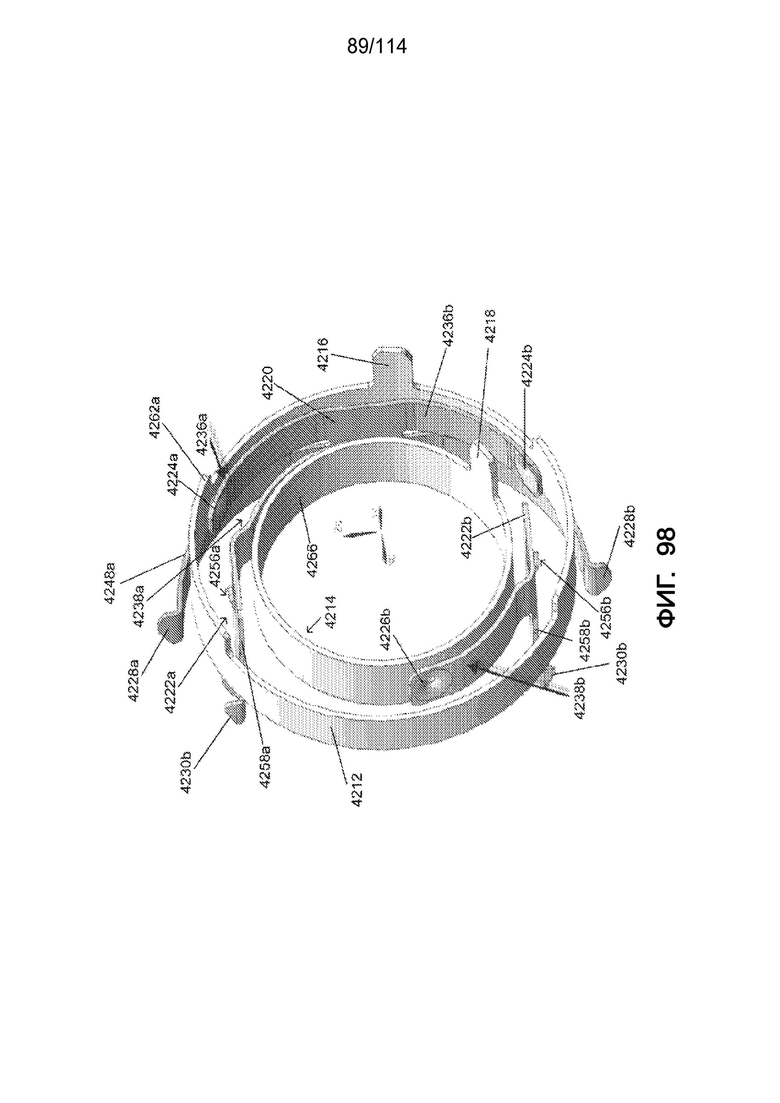
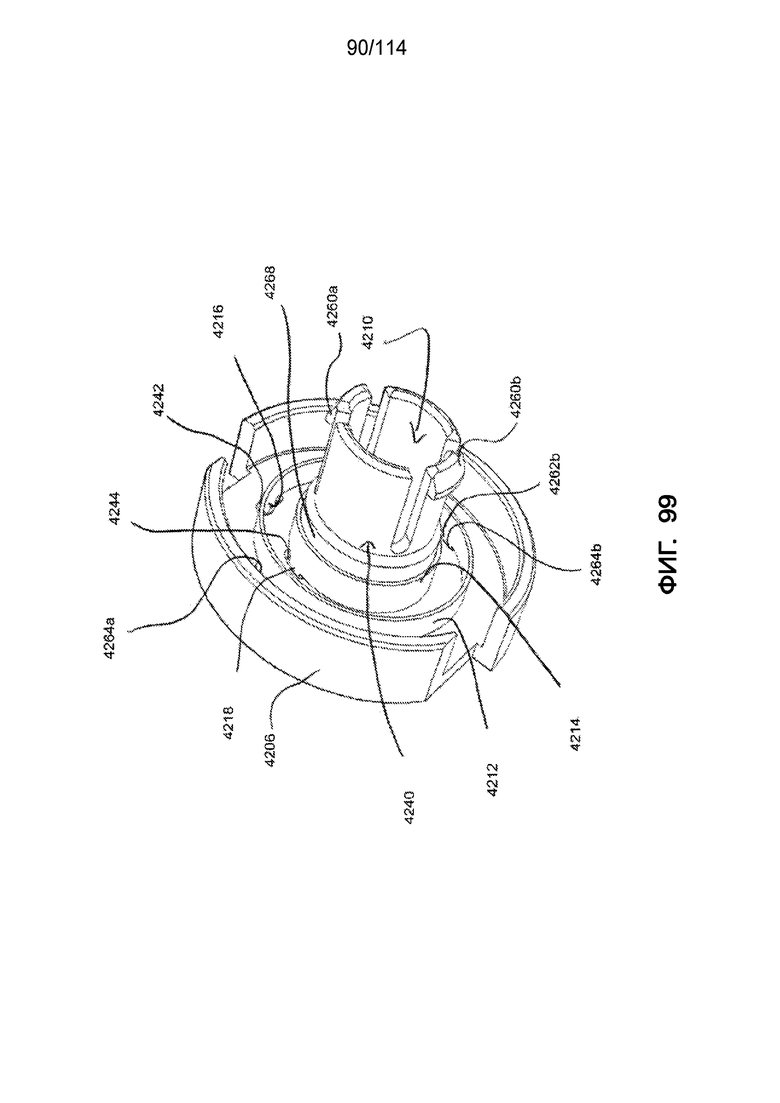

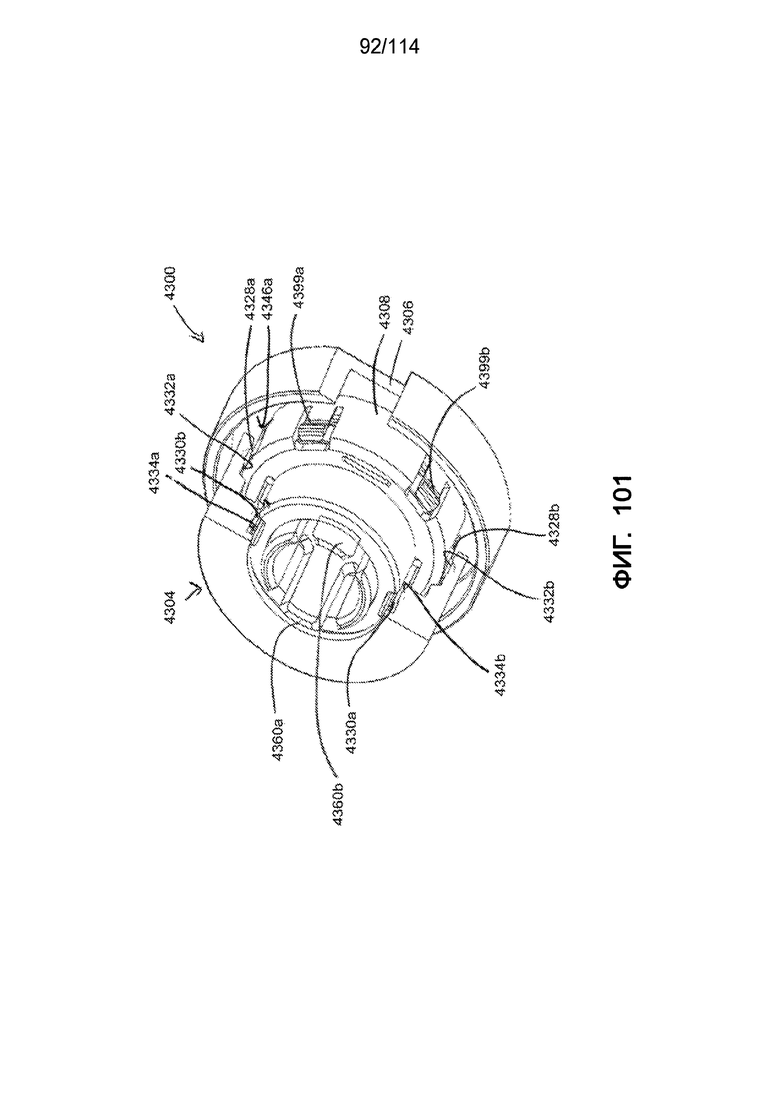
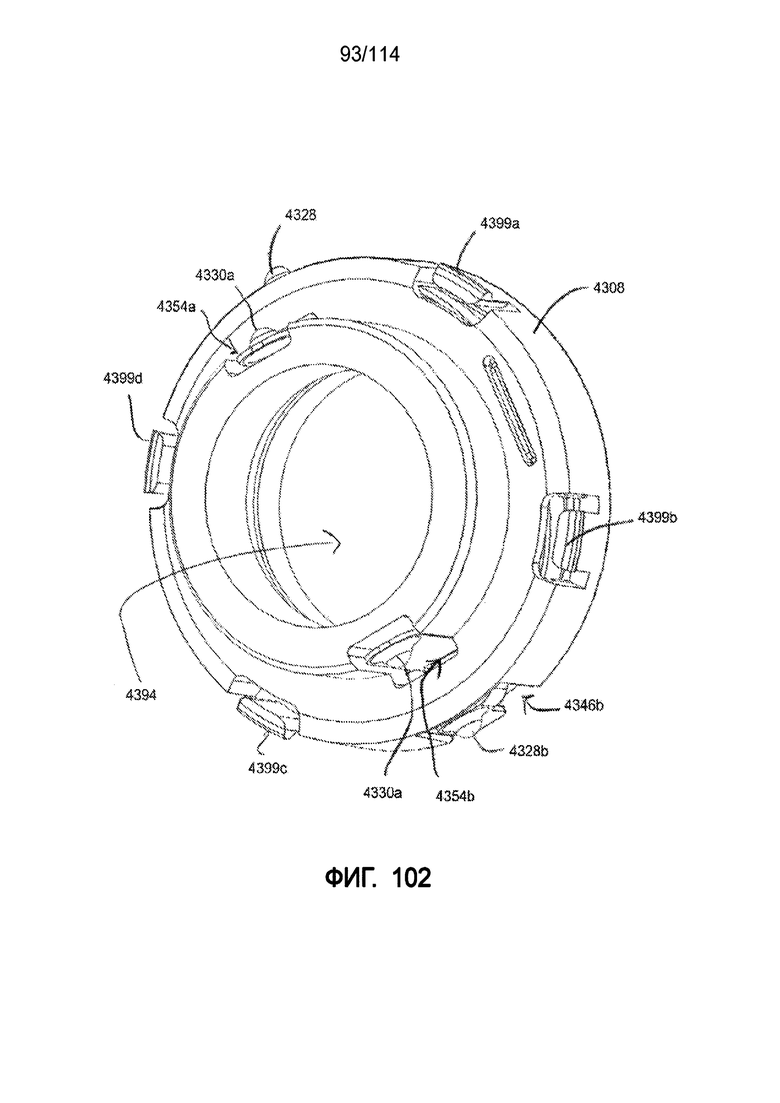
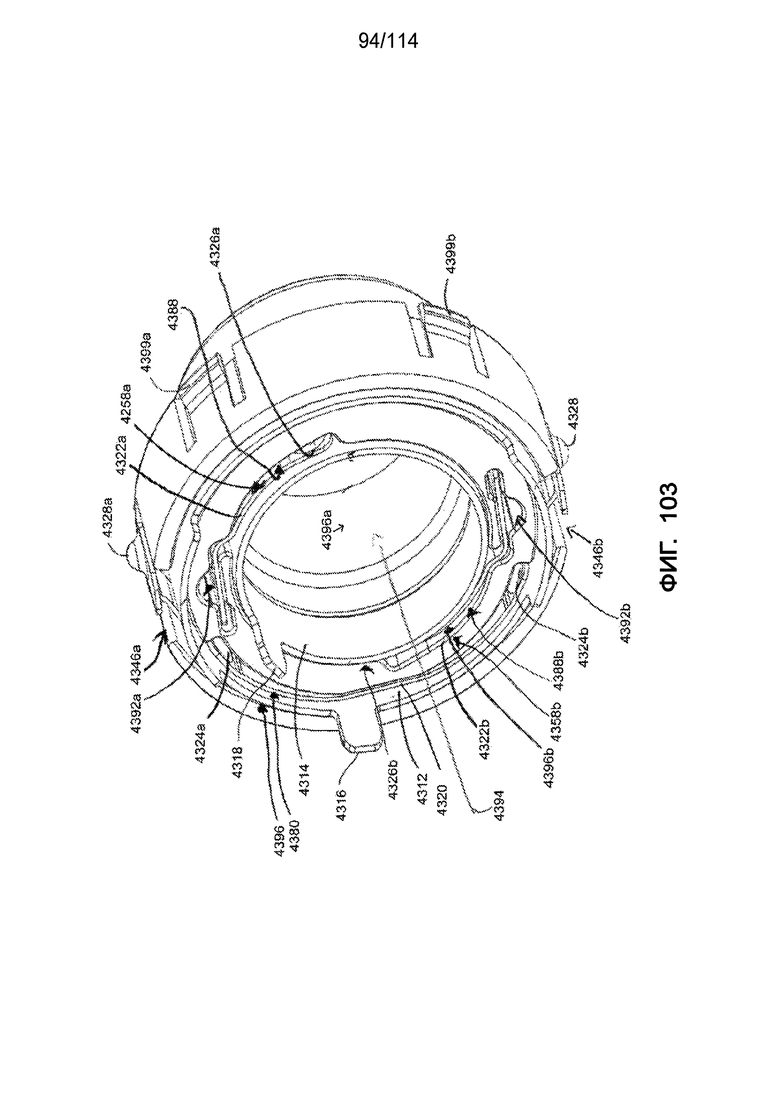
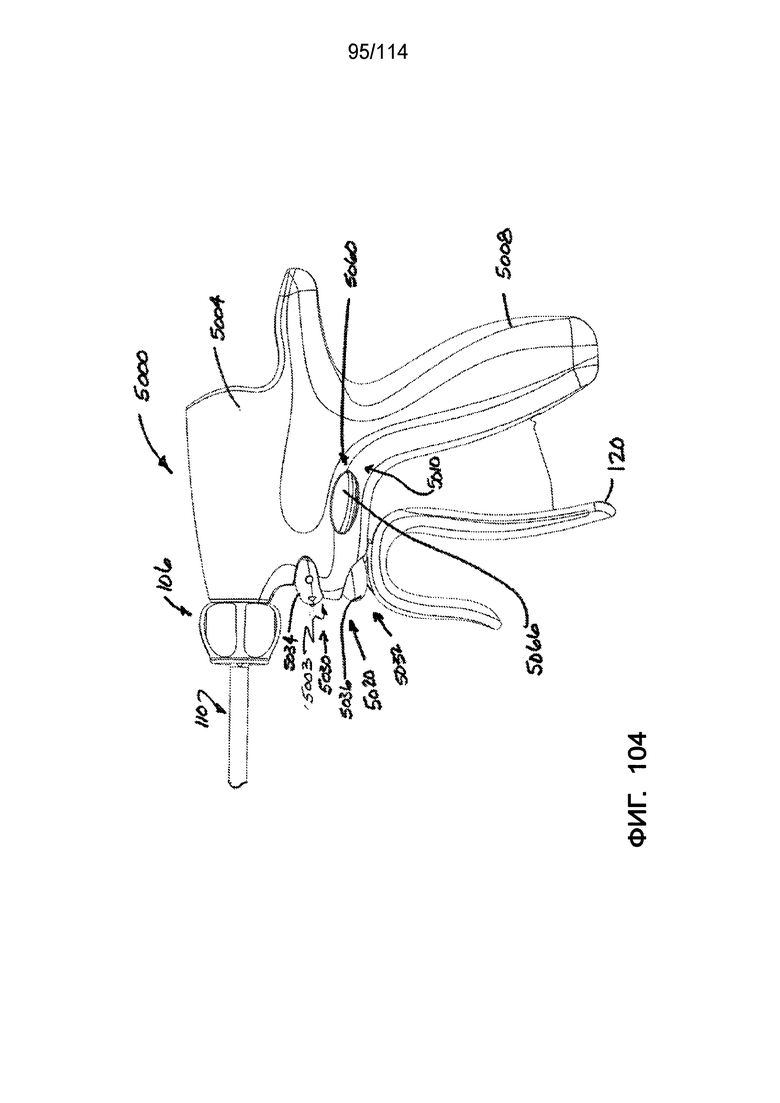
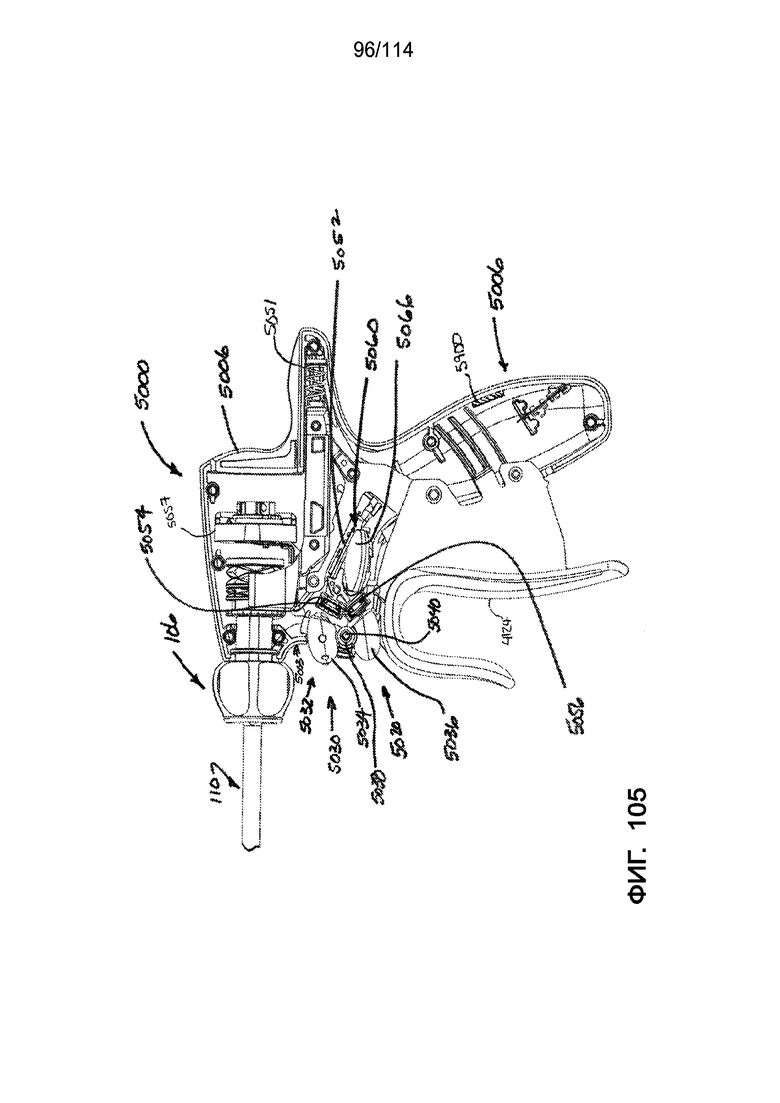
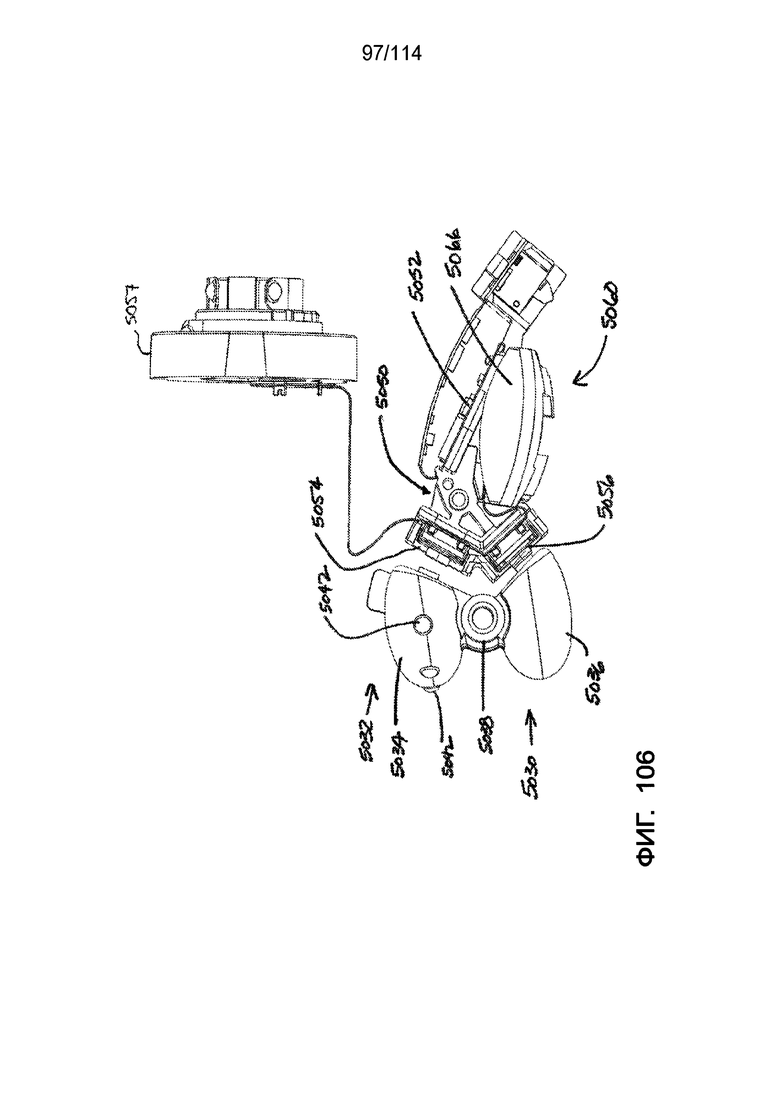

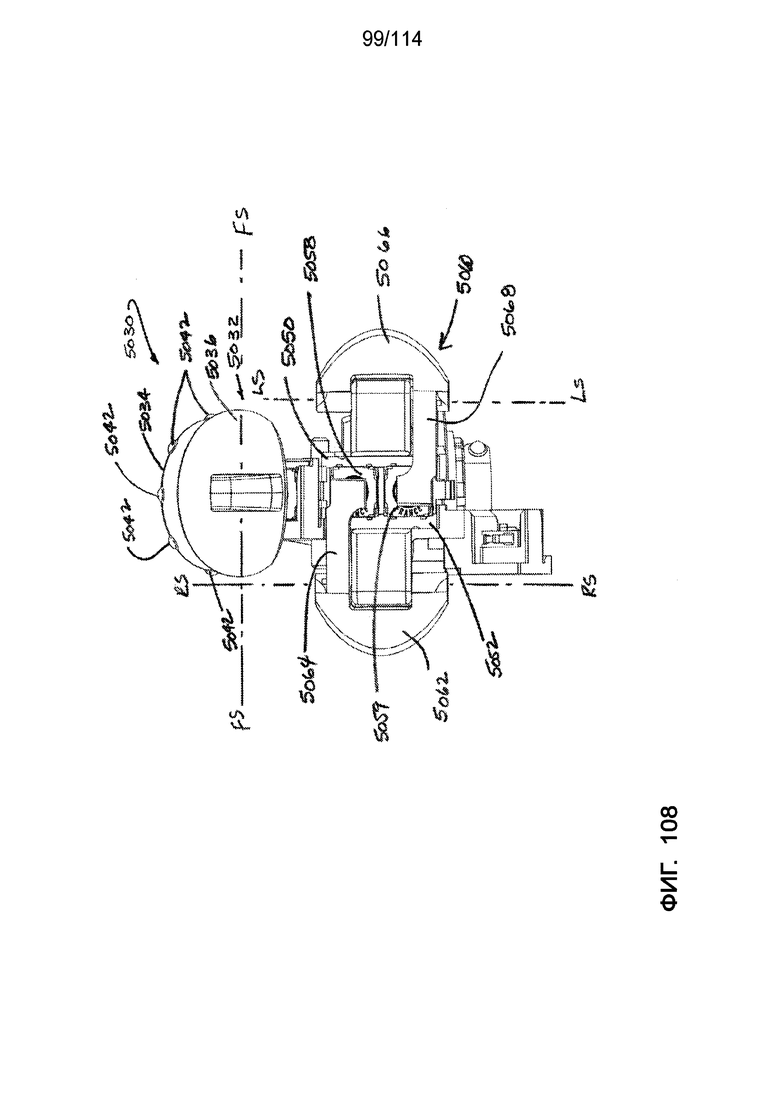


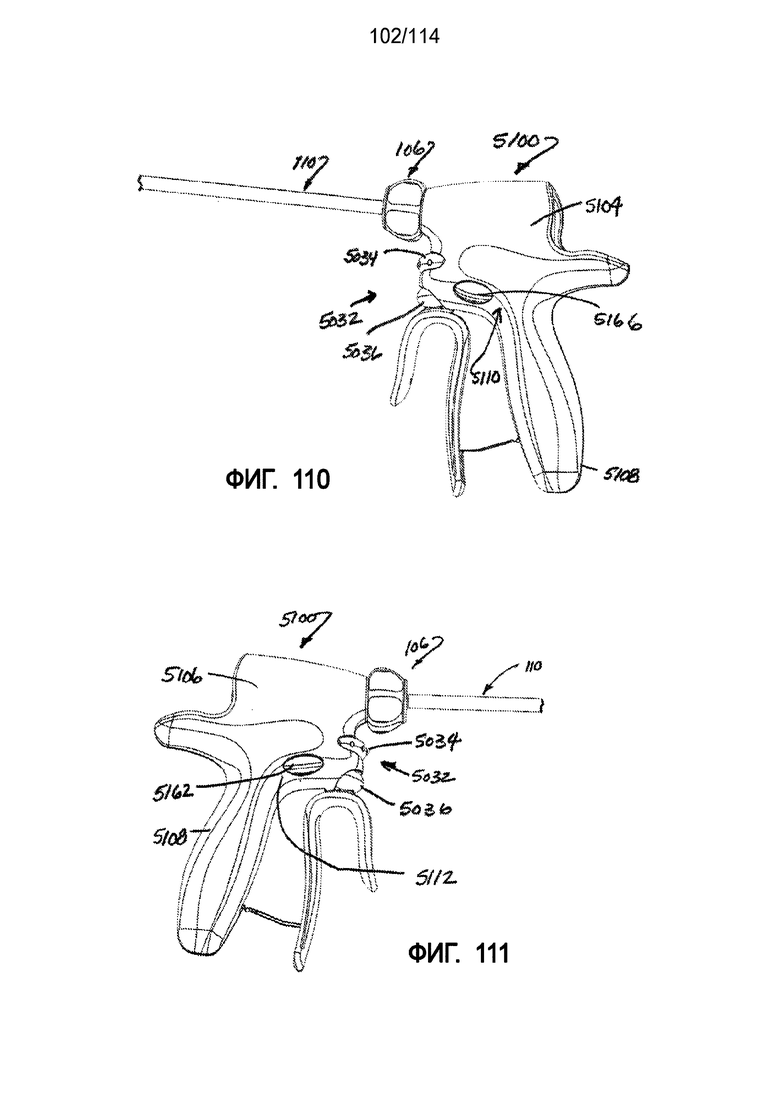

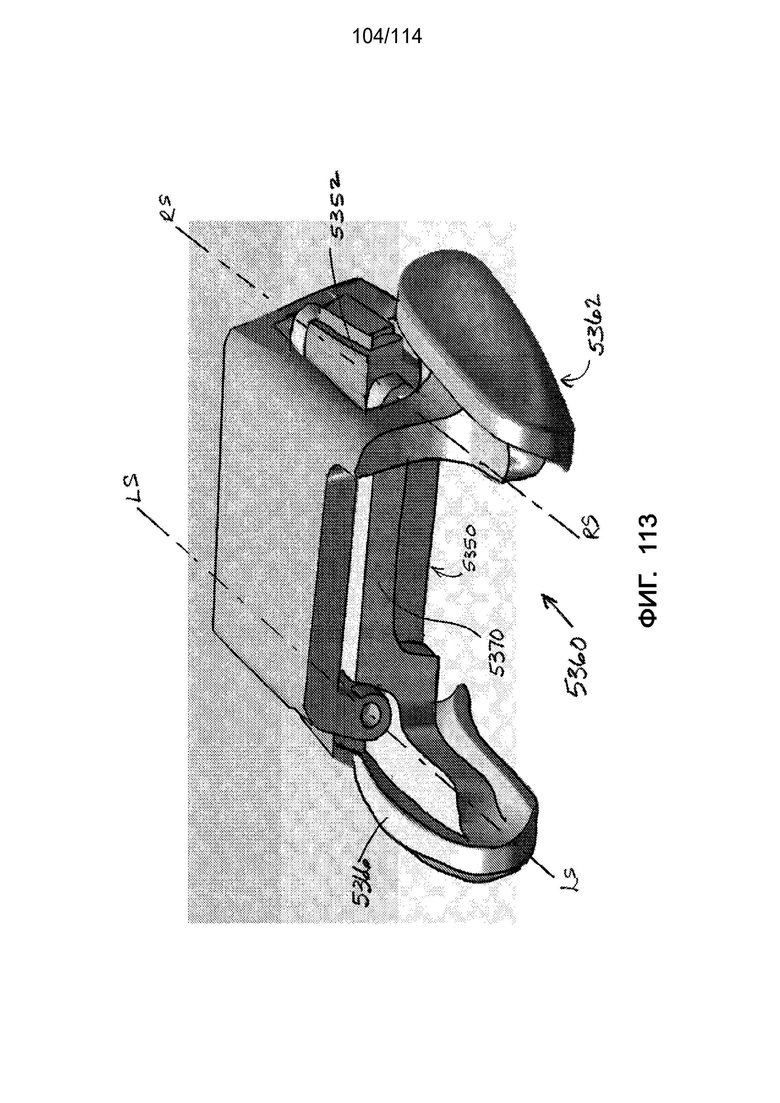


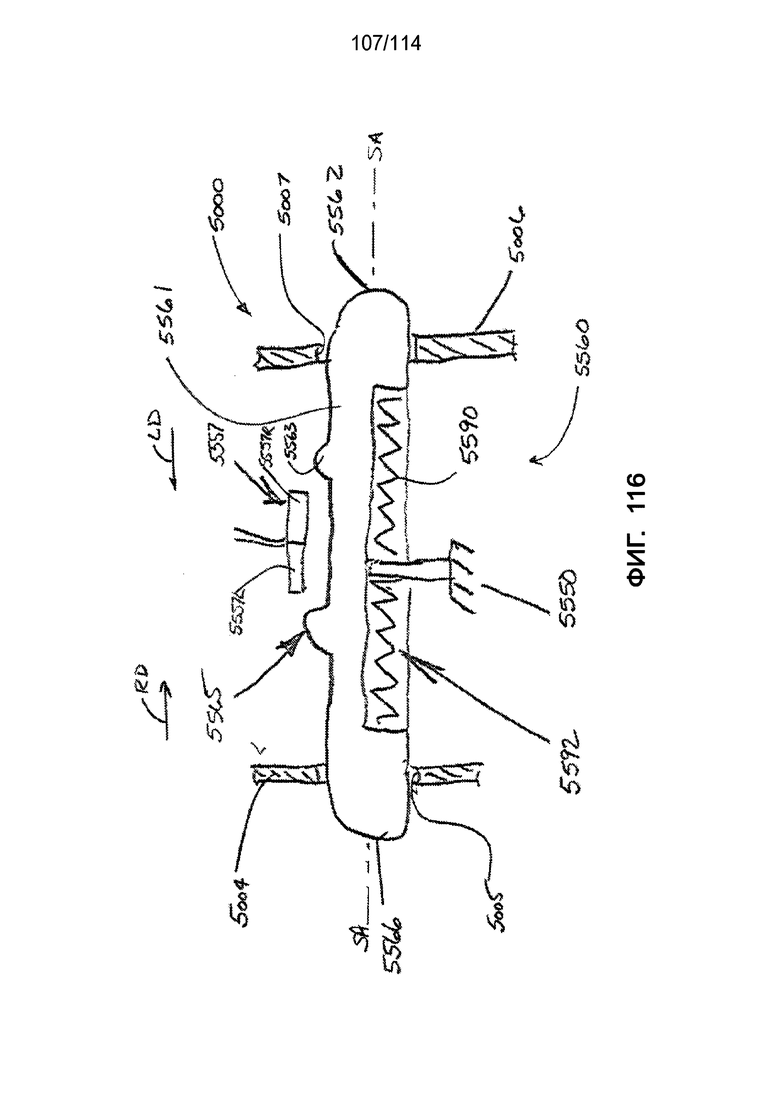

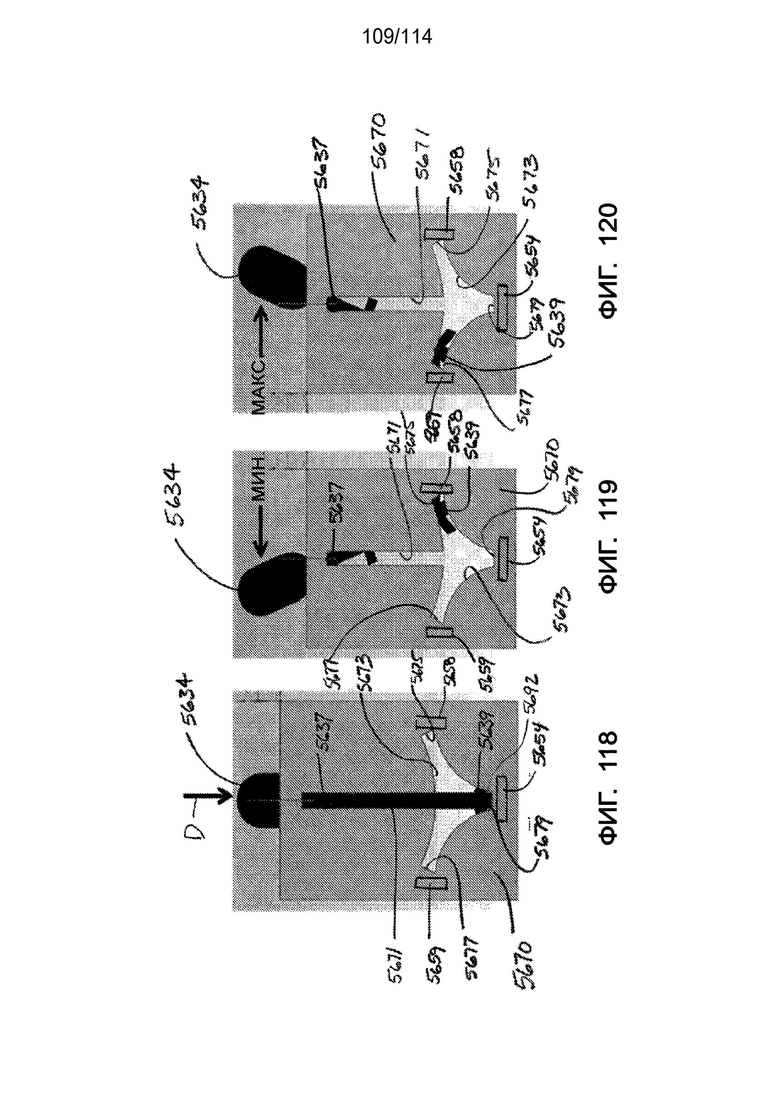
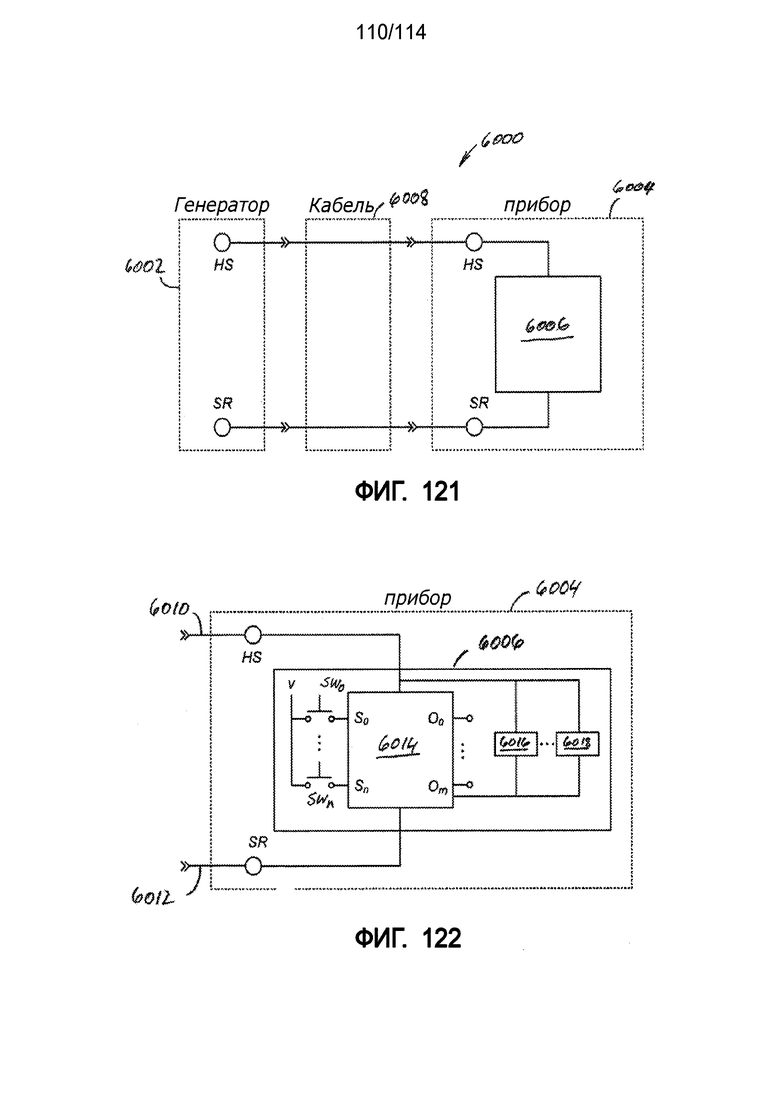

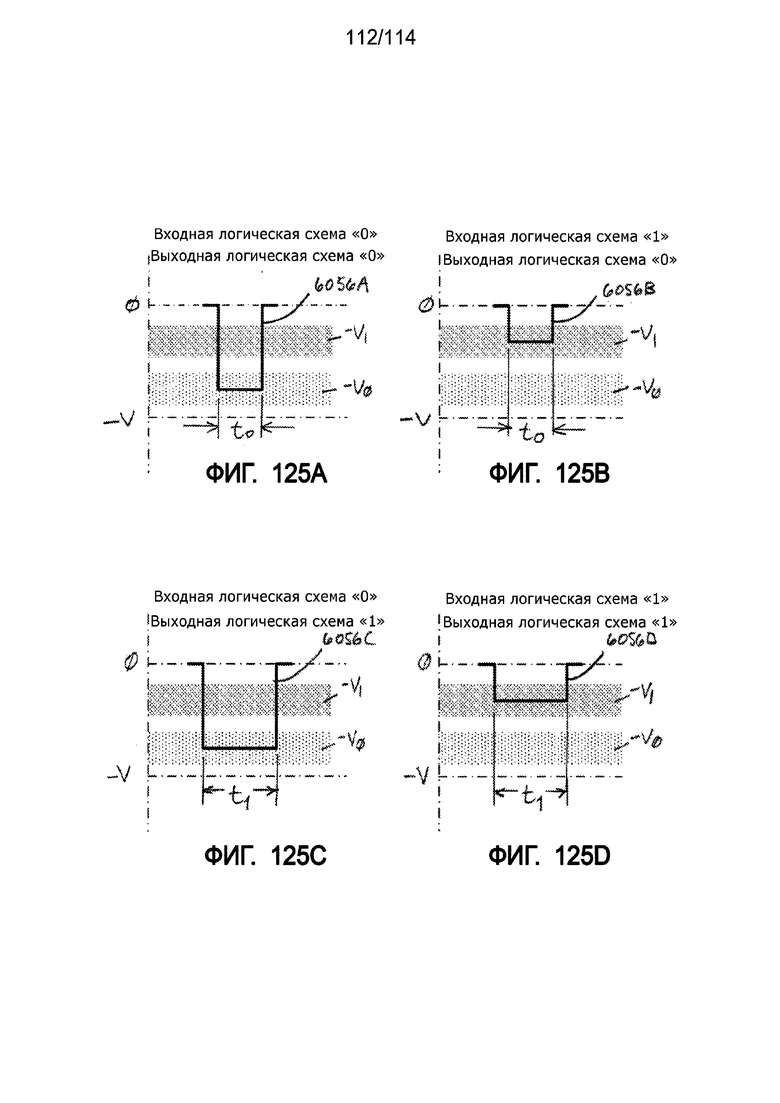
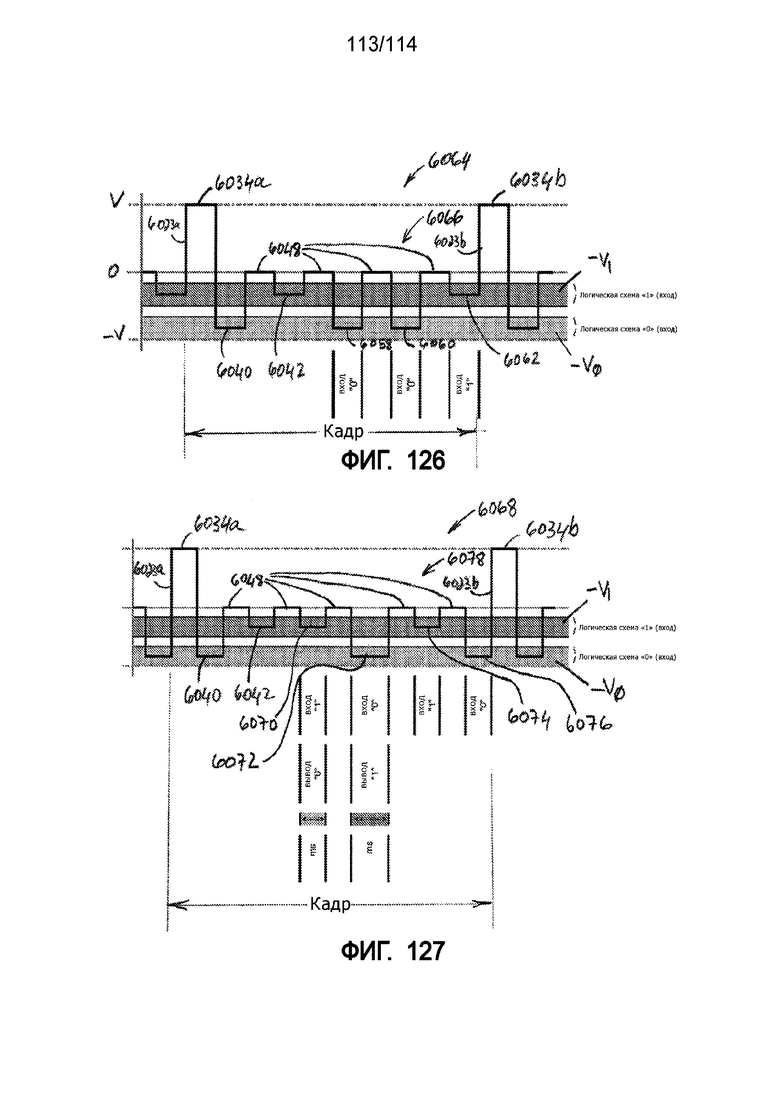
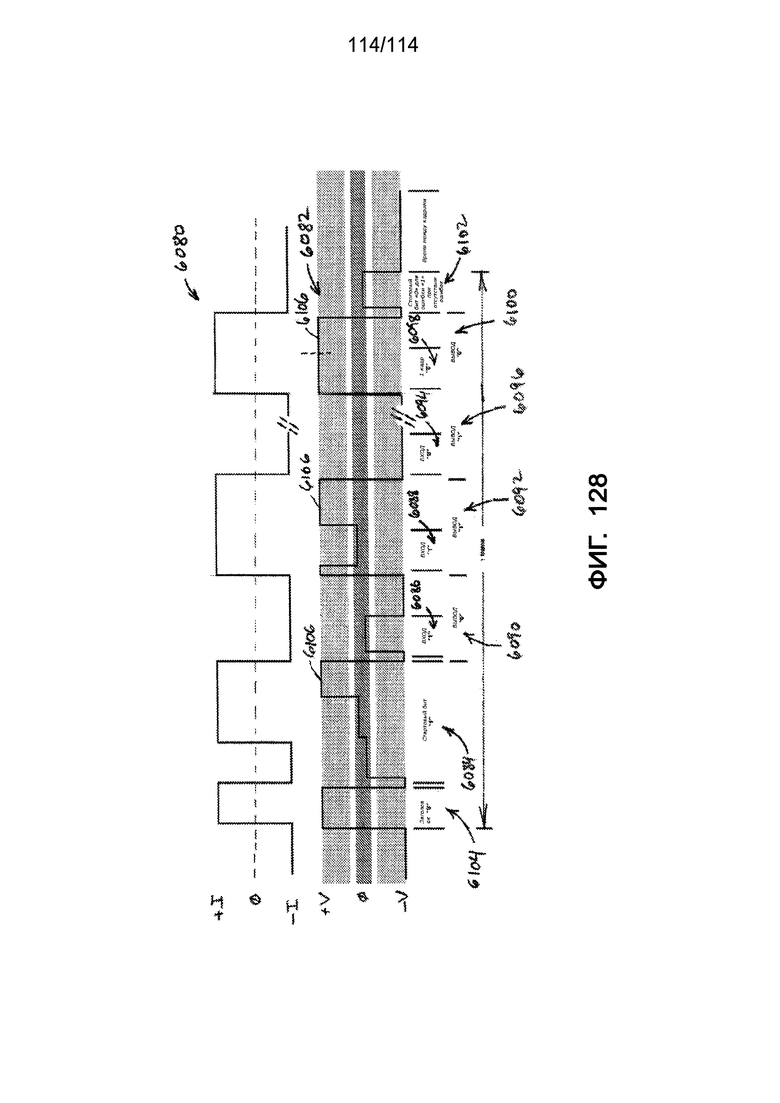
Группа изобретений относится к медицинской технике, а именно к ультразвуковым хирургическим системам. Система для приведения в действие концевого зажима, соединенного с ультразвуковой приводной системой хирургического аппарата, содержит по меньшей мере одну электронную схему, выполненную с возможностью получения первого запроса активации, для порогового периода времени генерирования обратной связи, указывающей на активацию ультразвукового хирургического аппарата, пока ультразвуковой хирургический аппарат поддерживается в деактивированном состоянии, в конце порогового периода времени активации ультразвукового хирургического аппарата путем передачи управляющего сигнала к ультразвуковой приводной системе для приведения в действие концевого зажима. Способ приведения в действие концевого зажима осуществляется посредством системы. Использование изобретений позволяет расширить арсенал приводных систем хирургических аппаратов. 2 н. и 2 з.п. ф-лы, 128 ил., 7 табл. 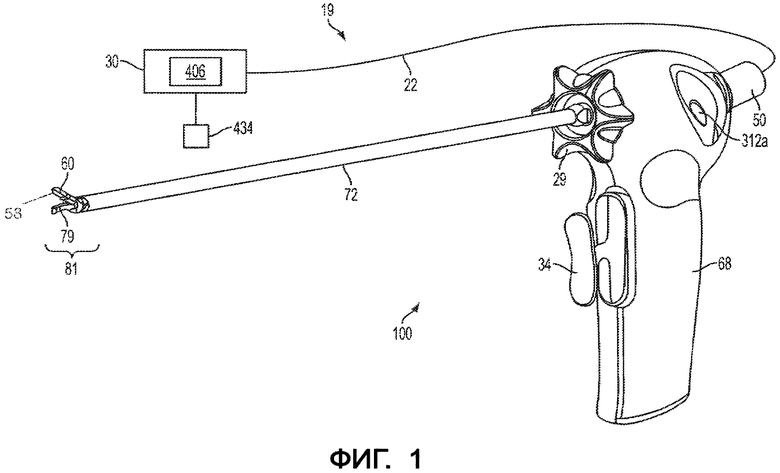
1. Хирургическая система для приведения в действие концевого зажима, соединенного с ультразвуковой приводной системой хирургического аппарата, содержащая по меньшей мере одну электронную схему, выполненную с возможностью:
получения первого запроса активации;
для порогового периода времени генерирования обратной связи, указывающей на активацию ультразвукового хирургического аппарата, пока ультразвуковой хирургический аппарат поддерживается в деактивированном состоянии;
в конце порогового периода времени активации ультразвукового хирургического аппарата путем передачи управляющего сигнала к ультразвуковой приводной системе для приведения в действие концевого зажима.
2. Способ приведения в действие концевого зажима, соединенного с ультразвуковой приводной системой ультразвукового хирургического аппарата, с использованием системы по п. 1, содержащий:
получение первого запроса активации;
для порогового периода времени генерирование обратной связи, указывающей на активацию ультразвукового хирургического аппарата, пока ультразвуковой хирургический аппарат поддерживается в деактивированном состоянии;
в конце порогового периода времени активирование ультразвукового хирургического аппарата путем передачи управляющего сигнала к ультразвуковой приводной системе для приведения в действие концевого зажима.
3. Способ по п. 2, далее содержащий поддержание обратной связи, указывающей на активацию ультразвукового хирургического аппарата после активации ультразвукового хирургического аппарата.
4. Способ по п. 2, в котором активация ультразвукового хирургического аппарата содержит:
поддержание управляющего сигнала на первом уровне на протяжении первого периода времени;
в конце первого периода времени изменение управляющего сигнала до второго уровня, причем мощность, подаваемая к концевому зажиму на втором уровне, выше мощности, подаваемой к концевому зажиму на первом уровне;
поддержание управляющего сигнала на втором уровне до тех пор, пока управляющий сигнал не опустится ниже первого порогового наклона частоты;
когда управляющий сигнал опускается ниже первого порогового наклона частоты, изменение управляющего сигнала до третьего уровня до тех пор, пока управляющий сигнал не упадет ниже второго порогового наклона частоты, причем мощность, подаваемая к концевому зажиму на третьем уровне, выше мощности, подаваемой к концевому зажиму на втором уровне.
| US 2010036405 A1, 11.02.2010 | |||
| US 2011009890 A1, 13.01.2011 | |||
| US 6306131 B1,23.10.2001 | |||
| US 2011082486 A1, 07.04.2011 | |||
| УЛЬТРАЗВУКОВОЙ СКАЛЬПЕЛЬ | 2007 |
|
RU2433807C2 |

