Изобретение относится к вибрационной технике и может быть использовано в различных отраслях промышленности.
Наиболее близким к заявленному объекту является известное устройство для поддержания резонансных механических колебаний, (патент РФ №2335352, В06В 1/14, 2004 г. - прототип), содержащее рабочий орган, источник возмущающей периодической силы, основную и виброизолирующую упругие связи, рабочий орган, соединенный с основанием виброизолирующей упругой связью, в качестве источника возмущающей периодической силы применен инерционный вибратор, связанный с рабочим органом через основную упругую связь.
Недостатками данного устройства является невозможность его использования для автоматической настройки на резонансный режим вследствие неопределенности массы рабочего органа с технологической нагрузкой при ее произвольном изменении и, соответственно, неопределенности резонансной частоты системы и опорного сигнала, а также невозможности оценки резонансной частоты в системах с нелинейными характеристиками восстанавливающей силы и с двигателем ограниченной мощности. Кроме того, недостатком известного устройства является сравнительно невысокое демпфирование в системе.
Технический результат - создание устройства для автоматической настройки на резонансный режим колебаний рабочего органа вибромашины, возбуждаемых дебалансными инерционными вибровозбудителями с приводом от асинхронного двигателя, при изменении параметров механической системы вибромашины в широких пределах за счет управления частотой питающего напряжения, а также увеличение демпфирования в системе.
Это достигается тем, что в системе виброизоляции с автоматической настройкой и поддержанием резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя, содержащей рабочий орган вибромашины в виде платформы, установленной на неподвижном основании с помощью упруговязких опор, блок управления, частотный преобразователь электроэнергии, два датчика положения дебаланса, датчик колебаний, установленный на рабочем органе вибромашины, датчики положения дебаланса выполнены в виде двух оптопар, установленных на корпусе электродвигателя в точках, расположенных симметрично относительно оси вращения дебаланса на горизонтальной линии, проходящей через эту ось, а дебаланс выполнен с отверстием, центр которого расположен на линии, соединяющей центр вращения и центр масс дебаланса в точке, соответствующей оси чувствительности оптопар, причем датчик колебаний и датчики положения дебаланса соединены с входами блока управления, выход которого соединен с управляющим входом частотного преобразователя, силовой вход которого соединен с внешним источником электропитания, а выход частотного преобразователя соединен с асинхронным двигателем, блок управления состоит из устройства согласования сигналов, блока вычисления фазового сдвига и программируемого логического контроллера, причем к входу устройства согласования сигналов подключен датчик колебаний, а выход соединен с аналоговым входом блока вычисления фазового сдвига, к цифровым входам которого присоединены датчики положения дебаланса, а выход блока вычисления фазового сдвига соединен с входом программируемого логического контроллера, выход которого соединен с управляющим входом частотного преобразователя, датчик колебаний выполнен в виде виброметра, велосиметра или акселерометра, упругая составляющая упруговязких опор выполнена в виде комбинированной пружины, содержащей цилиндрическую винтовую пружину, состоящую из двух частей со встречно направленными концами, одна часть из которых имеет витки прямоугольного сечения, а другая часть пружины выполнена полой, при этом встречно направленный конец первой части размещен в полости второй, зазоры сегментного профиля контактирующих частей пружины заполнены антифрикционной смазкой, при этом на конце второй части пружины установлена уплотнительная манжета для предотвращения утечки смазки, а первую часть винтовой пружины, выполненную с витками прямоугольного сечения с закругленными кромками, охватывает трубка из демпфирующего материала, например полиуретана, а зазоры в первой части винтовой пружины, выполненной с витками прямоугольного сечения, которую охватывает трубка из демпфирующего материала, заполнены крошкой из фрикционного материала, выполненного из композиции, включающей следующие компоненты при их соотношении, мас.%:
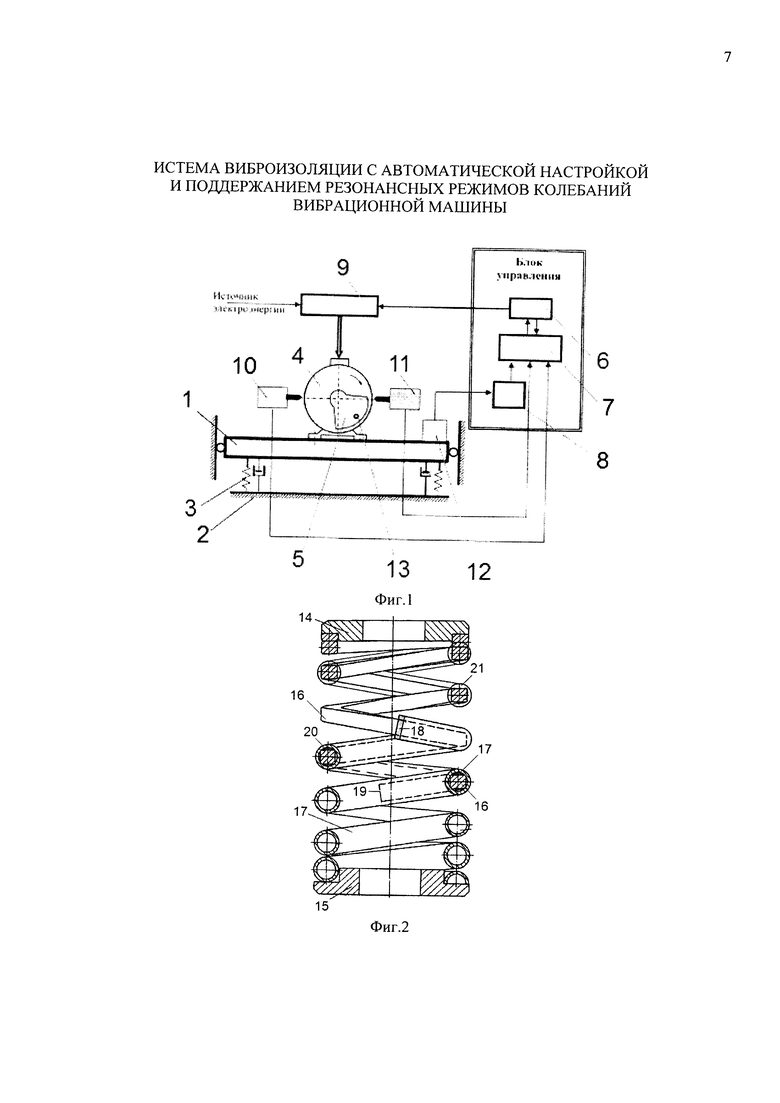
На фиг. 1 показана принципиальная схема системы, на фиг. 2 - схема упругой составляющей упруговязких опор 3.
Устройство для автоматической настройки поддержания резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя включает в себя рабочий орган вибромашины в виде платформы 1, установленной на неподвижном основании 2 с помощью упруговязких опор 3. На платформе 1 установлены асинхронный двигатель 4 с вращающимся дебалансом 5 и датчик колебаний 6. На корпусе асинхронного двигателя 4 закреплены датчики положения дебаланса 5, выполненные в виде двух оптопар 7 и 8, которые расположены на корпусе электродвигателя 4, в точках, симметричных относительно оси вращения дебаланса на горизонтальной линии, проходящей через эту ось. В дебалансе выполнено отверстие 9, центр которого расположен на линии, соединяющей центр вращения и центр масс дебаланса 5 в точке, соответствующей оси чувствительности оптопар 7 и 8. Датчик колебаний 6 и датчики положений 7 и 8 соединены с блоком управления 10, выход которого соединен с входом управляющего преобразователя электроэнергии 11, соединенный с внешним источником электропитания и имеющий выход н асинхронный двигатель 4.
Блок управления 10 состоит из устройства согласования сигналов 12, блока вычисления фазового сдвига 13 и программируемого логического контроллера 14, причем к выходу устройства согласования сигналов 12 подключен датчик колебаний 6, а его выход соединен с аналоговым входом блока вычисления фазового сдвига 13, к цифровым входам которого присоединены датчики положения дебаланса 7 и 8, причем выход блока вычисления фазового сдвига 13 также соединен с входом частотного преобразователя 11 через контроллер 14. Датчик колебаний 6 может быть выполнен в виде виброметра, велосиметра или акселерометра.
Принцип работы устройства основан на периодическом измерении фазового сдвига Между направлением возмущающей силы, которое однозначно определяется угловым положением дебаланса, и колебаниями рабочего органа, в результате чего определяется режим работы вибромашины (дорезонансный, резонансный или зарезонансный) и формируются управляющие воздействия. При резонансе фазовый сдвиг возмущающей силы составляет π/2 относительно перемещения рабочего органа. Датчики углового положения дебаланса представляют собой оптоэлектронные устройства оптопары ДП1 и ДП2, формирующие импульсы электрического напряжения при прохождении оптического луча через отверстие в дебалансе (фиг. 1).
Отверстие в дебалансе расположено на радиальной линии, соединяющей центр вращения вала с центром масс дебаланса. Датчики положения дебаланса установлены на корпусе электродвигателя в точках, расположенных на горизонтальном диаметре, так, чтобы при прохождении дебалансом горизонтальной линии происходило срабатывание оптопар ДП1 или ДП2 и формирование электрического импульса, соответствующего углу поворота дебаланса (фиг. 1).
Датчик колебаний ДК рабочего органа, жестко установленный на рабочем органе, формирует электрическое напряжение, соответствующее его колебаниям. Сигнал с ДК поступает на блок СС, в котором в случае измерения перемещения сигнал без преобразования поступает в блок ВФС; в случае измерения скорости сигнал интегрируется один раз, а в случае измерения ускорения сигнал интегрируется дважды. В блоке ВФС, построенном с использованием электронных микросхем, вычисляется рассогласование между измеренным сдвигом фазы ϕ и сдвигом фазы, соответствующим резонансному режиму колебаний, равным π/2. По знаку величины рассогласования определяется режим работы машины: дорезонансный, если ϕ<π/2, резонансный, если ϕ=π/2 или зарезонансный, если ϕ>π/2.
Из блока ВФС в блок ПЛК поступает сигнал, соответствующий текущему режиму работы, в зависимости от которого в блоке ПЛК генерируется сигнал, соответствующий необходимой корректировке частоты вращения дебаланса. Этот сигнал передается на ЧП, что приводит к изменению питающего напряжения электродвигателя и соответственно частоты его вращения. Блок вычисления фазового сдвига (ВФС) работает следующим образом (фиг. 2).
Пуск двигателя происходит под управлением ПЛК с номинальными значениями частоты и напряжения, блок ВФС во время пуска выключен. После завершения пускового режима и выхода электродвигателя в рабочую область его механической характеристики сигнал от ПЛК сбрасывает триггеры Т1 и Т2, что приводит к сбрасыванию триггера Т3 и обнулению счетчиков СТ1 и СТ2. Затем ПЛК формирует сигнал «А», равный логической единице, который включает работу блока ВФС. В момент времени, когда угол поворота дебаланса относительно вертикальной оси по направлению движения составит π/2, срабатывает оптопара ДП1 (светодиод VD1 и фотодиод VD3). В результате кратковременный световой импульс установит триггер Т1, который разрешает работу счетчика СТ1 (при R=0 счетчик формирует выходной код, при R=1 - обнуляется). СТ1 выполняет подсчет тактовых импульсов «Т». Все счетчики, используемые в схеме, работают в режиме суммирования. Выходы СТ1 подсоединены к входам регистра RG1. Установленный Т1 переводит триггер Т3 в режим работы D-триггера. В момент времени, когда угол поворота дебаланса 4 относительно вертикальной оси по направлению движения составит 3π/2, срабатывает оптопара ДП2 (светодиод VD2 и фотодиод VD4). В результате кратковременный световой импульс, проходя через логический элемент «И», одновременно устанавливает триггер Т2 и записывает в регистр RG1 двоичный код, соответствующий  периода колебаний. Фактически CT1 фиксирует полупериод колебаний, но, сдвинув разряды при подаче их в регистр, получим деление полупериода на два. Установленный T2 разрешает прохождение импульсов с выхода одновибратора G1 на тактовый вход С триггера Т3. Сигнал с датчика ДК через блок СС поступает на оптопару VD5, подключенную к входу ST3 одновибратора G1. Одновибратор G1 формирует короткие импульсы при подаче на его вход ST3 положительного фронта сигнала. Импульс на выходе G1 будет формироваться в момент, когда перемещение рабочего органа принимает нулевое значение при переходе из отрицательной области в положительную. Импульс от G1 устанавливает Т3, который запускает счетчик CT2, а также запрещает повторную запись кода в RG1.
периода колебаний. Фактически CT1 фиксирует полупериод колебаний, но, сдвинув разряды при подаче их в регистр, получим деление полупериода на два. Установленный T2 разрешает прохождение импульсов с выхода одновибратора G1 на тактовый вход С триггера Т3. Сигнал с датчика ДК через блок СС поступает на оптопару VD5, подключенную к входу ST3 одновибратора G1. Одновибратор G1 формирует короткие импульсы при подаче на его вход ST3 положительного фронта сигнала. Импульс на выходе G1 будет формироваться в момент, когда перемещение рабочего органа принимает нулевое значение при переходе из отрицательной области в положительную. Импульс от G1 устанавливает Т3, который запускает счетчик CT2, а также запрещает повторную запись кода в RG1.
После этого схема ожидает прихода импульса, при котором формируется сигнал «Б», записывающий двоичный код на выходе СТ2 в регистр RG3, а код из RG1 - в RG2. Выходы регистра RG2 подключены к входам X, а выходы регистра RG3 - к входам Y двоичного компаратора, который сравнивает значения на входах и формирует соответствующий сигнал на выходе, поступающий в ПЛК. Если числовой код в RG2 меньше, чем в RG3, то на выходе «X<Y» компаратора появится логическая единица, а на выходах «Х=Y» и «Х>Y» - нули, и режим работы системы будет определен как дорезонансный, а это значит, что ПЛК будет увеличивать частоту вращения вибровозбудителя. Если числовой код в RG2 больше, чем в RG3, то на выходе «X>Y» компаратора появится логическая единица, а на выходах «Х=У» и «Х<Y» - нули, и режим работы системы будет определен как зарезонансный, а это значит, что ПЛК будет уменьшать частоту вращения вибровозбудителя. Если числовые коды в RG2 и в RG3 равны, то на выходе «X=Y» компаратора появится логическая единица, а на выходах «X>Y» и «X<Y» - нули, и режим работы системы будет определен как резонансный, а это значит, что ПЛК оставит частоту вращения вибровозбудителя без изменения. С целью учета погрешностей на компаратор подаются старшие разряды двоичных кодов. Сигнал «Б» также сбрасывает триггеры Т1 и Т2, подготавливая схему к следующему такту работы.
Упругая составляющая упруговязких опор 3 выполнена в виде комбинированной пружины со встроенным демпфером (фиг. 2) и содержит цилиндрическую винтовую пружину, состоящую из двух частей 16 и 17 со встречно направленными концами 19 и 18 соответствующих витков этих пружин. На опорных витках пружины выполнены опорные кольца 14 и 15 для прочной и надежной фиксации концов пружин при их работе.
Первая часть винтовой пружины 16 выполнена с витками прямоугольного (или квадратного) сечения с закругленными кромками, а вторая часть 17 пружины выполнена полой, например круглого сечения, при этом встречно направленный конец 19 первой части пружины размещен в полости встречно направленной второй части пружины с концом 18, при этом второй ее конец, закрепленный на опорном кольце 15, загерметизирован, например при помощи резьбовой пробки (на чертеже не показана).
В полости второй части 17 пружины, выполненной полой круглого сечения, образованы с четырех сторон, относительно прямоугольного сечения первой части 16 пружины, зазоры 20 сегментного профиля в сечении, перпендикулярном оси контактирующих частей 16 и 17 пружины.
Для лучшей регулировки жесткости пружины (без задиров, заминов и заеданий) зазоры 20 сегментного профиля контактирующих частей 16 и 17 пружины заполнены антифрикционной смазкой, например вязкой типа «солидол», при этом на конце 18 второй части пружины установлена уплотнительная манжета (на чертеже не показана) для предотвращения утечки (потери) смазки. Такая конструкция представляет собой своеобразный демпфер «вязкого трения» с протяженным дроссельным элементом в виде зазоров 20 сегментного профиля контактирующих частей 16 и 17 пружины, которые в этом случае будут являться аналогами системы соответственно «поршень-цилиндр».
Первую часть 16 винтовой пружины, выполненную с витками прямоугольного (или квадратного) сечения с закругленными кромками, охватывает трубка 21 из демпфирующего материала, например полиуретана, которая создает в системе виброзащиты трение, величина которого повышается при подходе системы к резонансному режиму, что и является аналогом демпфера «сухого трения».
Зазоры в первой части 16 винтовой пружины, выполненной с витками прямоугольного сечения, которую охватывает трубка 21 из демпфирующего материала, заполнены крошкой из фрикционного материала (на чертеже не показано).
Возможен вариант, когда зазоры в первой части винтовой пружины, выполненной с витками прямоугольного сечения, которую охватывает трубка из демпфирующего материала, заполнены крошкой из фрикционного материала, выполненного из композиции, включающей следующие компоненты при их соотношении, мас.%:
Комбинированная пружина со встроенным демпфером работает следующим образом.
Регулировка жесткости пружины осуществляется укорочением или удлинением высоты пружины. При вращении опорных колец 14 и 15 витки пружины перемещаются относительно друг друга во взаимно противоположных направлениях относительно продольной оси пружины, т.е. ввинчиваются или вывинчиваются. В первом случае (при ввинчивании) жесткость пружины увеличивается, а во втором случае (при вывинчивании) - уменьшается, что позволяет упростить регулировку жесткости пружины.
Таким образом, пружина благодаря избирательным свойствам обеспечивает эффективную пространственную виброизоляцию оборудования по всем шести направлениям колебаний (по трем осям Х.У, Z и поворотные колебания вокруг этих осей) с демпфированием колебаний на резонансе и при различных условиях работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| РЕЗИНОМЕТАЛЛИЧЕСКОЕ ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2639361C1 |
| ВИБРОЗАЩИТНАЯ СИСТЕМА С РЕГУЛИРУЕМЫМИ ПАРАМЕТРАМИ | 2016 |
|
RU2640154C1 |
| ВИБРОИЗОЛИРОВАННЫЙ ФУНДАМЕНТ | 2016 |
|
RU2631272C1 |
| СИСТЕМА ВИБРОИЗОЛЯЦИИ ЯДЕРНОГО РЕАКТОРА ПОДВОДНОЙ ЛОДКИ | 2016 |
|
RU2630780C1 |
| ВИБРОИЗОЛИРОВАННЫЙ ФУНДАМЕНТ | 2017 |
|
RU2655672C1 |
| ВИБРОИЗОЛИРОВАННЫЙ ФУНДАМЕНТ | 2017 |
|
RU2659931C1 |
| КОМБИНИРОВАННЫЙ ВИБРОИЗОЛЯТОР КОЧЕТОВА | 2016 |
|
RU2639357C1 |
| ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ОПЕРАТОРА | 2016 |
|
RU2640156C1 |
| СПОСОБ НАСТРОЙКИ РЕЖИМОВ РАБОТЫ ВИБРОЗАЩИТНОЙ СИСТЕМЫ | 2016 |
|
RU2640155C1 |
Изобретение относится к вибрационной технике. Система виброизоляции содержит платформу, установленную на неподвижном основании с помощью упруговязких опор, блок управления, частотный преобразователь электроэнергии, два датчика положения дебаланса и датчик колебаний. Блок управления состоит из устройства согласования сигналов, блока вычисления фазового сдвига и программируемого логического контроллера. Упругая составляющая упруговязких опор выполнена в виде цилиндрической винтовой пружины, состоящей из двух частей со встречно направленными концами. Первая часть пружины имеет витки прямоугольного сечения с закругленными кромками, а вторая часть выполнена полой. Встречно направленный конец первой части размещен в полости второй. Зазоры сегментного профиля контактирующих частей пружины заполнены антифрикционной смазкой. На конце второй части пружины установлена уплотнительная манжета для предотвращения утечки смазки. Первую часть винтовой пружины охватывает трубка из демпфирующего материала. Зазоры в первой части винтовой пружины, которую охватывает трубка из демпфирующего материала, заполнены крошкой из фрикционного материала. Достигается автоматическая настройка на резонансный режим колебаний рабочего органа вибромашины, а также увеличение демпфирования в системе. 2 ил.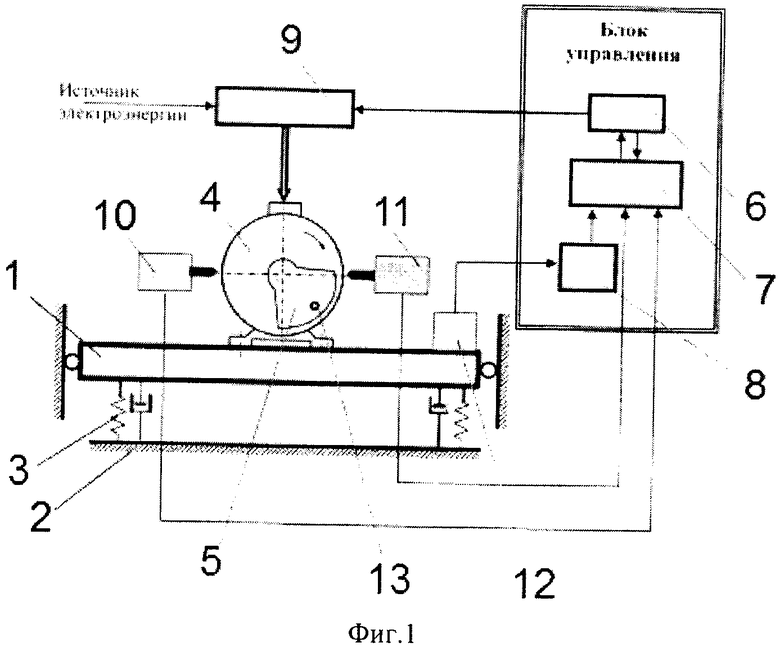
Система виброизоляции с автоматической настройкой и поддержанием резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя, содержащая рабочий орган вибромашины в виде платформы, установленной на неподвижном основании с помощью упруговязких опор, блок управления, частотный преобразователь электроэнергии, два датчика положения дебаланса, датчик колебаний, установленный на рабочем органе вибромашины, датчики положения дебаланса выполнены в виде двух оптопар, установленных на корпусе электродвигателя в точках, расположенных симметрично относительно оси вращения дебаланса на горизонтальной линии, проходящей через эту ось, а дебаланс выполнен с отверстием, центр которого расположен на линии, соединяющей центр вращения и центр масс дебаланса в точке, соответствующей оси чувствительности оптопар, причем датчик колебаний и датчики положения дебаланса соединены с входами блока управления, выход которого соединен с управляющим входом частотного преобразователя, силовой вход которого соединен с внешним источником электропитания, а выход частотного преобразователя соединен с асинхронным двигателем, блок управления состоит из устройства согласования сигналов, блока вычисления фазового сдвига и программируемого логического контроллера, причем к входу устройства согласования сигналов подключен датчик колебаний, а выход соединен с аналоговым входом блока вычисления фазового сдвига, к цифровым входам которого присоединены датчики положения дебаланса, а выход блока вычисления фазового сдвига соединен с входом программируемого логического контроллера, выход которого соединен с управляющим входом частотного преобразователя, датчик колебаний выполнен в виде виброметра, велосиметра или акселерометра, отличающаяся тем, что упругая составляющая упруговязких опор выполнена в виде комбинированной пружины, содержащей цилиндрическую винтовую пружину, состоящую из двух частей со встречно направленными концами, одна часть из которых имеет витки прямоугольного сечения, а другая часть пружины выполнена полой, при этом встречно направленный конец первой части размещен в полости второй, зазоры сегментного профиля контактирующих частей пружины заполнены антифрикционной смазкой, при этом на конце второй части пружины установлена уплотнительная манжета для предотвращения утечки смазки, а первую часть винтовой пружины, выполненную с витками прямоугольного сечения с закругленными кромками, охватывает трубка из демпфирующего материала, например полиуретана, а зазоры в первой части винтовой пружины, выполненной с витками прямоугольного сечения, которую охватывает трубка из демпфирующего материала, заполнены крошкой из фрикционного материала, выполненного из композиции, включающей следующие компоненты при их соотношении, мас.%:
| СПОСОБ ПОЛУЧЕНИЯ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2335352C2 |
| RU 2014110221 A, 27.09.2015 | |||
| JP 2012121024 A, 28.06.2012 | |||
| JP S5620843 A, 26.02.1981. | |||

