Изобретение относится к вибрационной технике и может быть использовано в различных отраслях промышленности.
Известен по А.С. СССР 1269854, В06В 1/14, способ возбуждения колебаний заданной частоты в вибрационной резонансной системе с двумя степенями свободы, заключающийся в том, что на вибрационную резонансную систему воздействуют возмущающей силой, при этом для вибрационных систем с упругими элементами, имеющими билинейную характеристику с изломом в положении статического равновесия, частоту возмущающей силы ν выбирают близкой к сумме двух собственных частот ω1 и ω2 колебательной системы и определяют из соотношения
где m1 и m2 - массы колеблющихся тел; К и К'=K+K1 - коэффициенты жесткости билинейной характеристики упругой подвески.
Недостатком способа является необходимость применения уравновешивающей массы, которая, как правило, имеет величину того же порядка, что и масса рабочего органа. Это приводит к значительному увеличению металлоемкости и усложнению конструкции устройства для осуществления способа. Кроме того, при большой массе рабочего органа получение резонансных колебаний на частотах возмущающей силы, создаваемых широко распространенными вибраторами (от 16 до 100 Гц), требует выполнения упругого элемента, связывающего рабочий орган и уравновешивающую массу с исключительно высокой жесткостью. Это требование в свою очередь создает проблему при практической реализации, т.к. узел вибрационной установки, выполняющий функцию уравновешивающей массы, должен иметь в зонах вокруг мест присоединения упругого элемента практически на порядок более высокую жесткость, чем упругий элемент. В противном случае этот узел будет испытывать подобно упругому элементу значительные деформации, что приведет к его поломке.
Известен по А.С. СССР 1609515, В06В 1/16, способ возбуждения резонансных колебаний механических систем синхронным электродвигателем, заключающийся в подаче на электродвигатель электрического напряжения, в измерении колебаний механической системы, осуществлении сдвига фазы измеренного сигнала, его усилении и подаче на электродвигатель, при этом одновременно подают напряжение на фазную обмотку и обмотку возбуждения электродвигателя, изменяют амплитуду напряжения, подаваемого на обмотки, поворачивают статор до обеспечения условия возбуждения резонансных колебаний.
Данному способу присущи те же недостатки, которые были указаны для предыдущего аналога. Кроме того, способ имеет ограниченные возможности для практического использования в силу высокой сложности, а также по причине использования синхронного электродвигателя, который значительно уступает асинхронному электродвигателю по объемам применения.
Ивестен по А.С. СССР 1726055, В06В 1/16, способ поддержания резонансных колебаний механической системы синхронным электродвигателем, заключающийся в подаче напряжения одновременно на фазную обмотку и обмотку возбуждения электродвигателя, измерении колебаний механической системы, осуществлении сдвига фаз измеренного сигнала, усилении его и подаче на электродвигатель, при этом изменяют амплитуду напряжения, подаваемого на электродвигатель, и поворачивают статор до обеспечения условий возбуждения резонансных колебаний, при измерении колебаний определяют ускорение колебаний механической системы, осуществляют сдвиг фазы измеренного сигнала на π/2, изменяют амплитуду напряжения, подаваемого на фазную обмотку, и поворачивают статор до совпадения движущего момента с моментом нагрузки, а на обмотку возбуждения подают постоянное напряжение.
Данный способ имеет те же недостатки, которые были указаны для предыдущего аналога.
В качестве прототипа выбран способ, осуществленный практически в резонансных вибрационных бункерных питателях и виброподъемниках (см. стр.42-45 и стр.67-69 в книге: В.А.Повидайло, Р.И.Силин, В.А.Щигель. Вибрационные устройства в машиностроении. Машгиз, Москва-Киев, 1962). Анализ конструкций этих вибрационных установок, а также описаний их работы позволяет отнести к существенным признакам осуществленного в них способа следующие признаки: на рабочий орган вибрационной установки воздействуют возмущающей периодической силой взаимодействия с реактивной массой, угловые частоты возмущающей периодической силы и собственных колебаний рабочего органа в колебательной системе настраивают в режим резонансных колебаний подстройкой жесткости основной упругой связи, резонансные колебания рабочего органа возбуждают на основной упругой связи с реактивной массой.
Недостатки прототипа: необходимость применения реактивной массы, невозможность применения при значительных технологических изменениях массы рабочего органа вследствие нарушения резонансного режима колебаний рабочего органа.
Задачей изобретения является получение резонансных механических колебаний рабочего органа вибрационной установки без применения реактивной массы с возможностью поддержания заданных колебаний рабочего органа при технологических изменениях его массы.
Решение задачи достигается тем, что в предлагаемом способе получения и поддержания резонансных механических колебаний на рабочий орган вибрационной установки воздействуют возмущающей периодической силой, угловые частоты возмущающей периодической силы и собственных колебаний рабочего органа в колебательной системе настраивают в режим резонансных колебаний, причем возмущающую периодическую силу передают рабочему органу через основную упругую связь, в качестве возмущающей периодической силы применяют возмущающую периодическую силу инерции, рабочий орган подвешивают в пространстве на виброизолирующей упругой связи с основанием, резонансные колебания рабочего органа возбуждают на основной упругой связи относительно источника возмущающей периодической силы инерции, при этом угловую частоту резонансных колебаний рабочего органа определяют по формуле

где ω - угловая частота резонансных колебаний рабочего органа в рад/с;
С - жесткость основной упругой связи в Н/м;
m - масса рабочего органа в кг;
изменяют угловую частоту возмущающей периодической силы инерции в области частот восходящей части резонансной кривой и настраивают амплитуду колебаний рабочего органа, заданную по технологии, для осуществления которой используется вибрационная установка, измеряют колебания рабочего органа, сигнал измерения колебаний обрабатывают, сравнивают с опорным сигналом, задающим амплитуду колебаний рабочего органа, полученный сигнал ошибки используют в качестве сигнала, управляющего угловой частотой возмущающей периодической силы инерции.
Устройство для получения и поддержания резонансных механических колебаний содержит рабочий орган, источник возмущающей периодической силы, основную и виброизолирующую упругие связи, при этом рабочий орган соединен с основанием виброизолирующей упругой связью, в качестве источника возмущающей периодической силы применен инерционный вибратор, связанный с рабочим органом через основную упругую связь, причем основная упругая связь выполнена с жесткостью, определяемой по формуле
где C - жесткость основной упругой связи в Н/м;
ωн - номинальная угловая частота возмущающей силы инерционного вибратора в рад/с;
mн - номинальная масса рабочего органа в кг;
жесткости основной и виброизолирующей упругих связей связаны соотношением
С>>Co
где С - жесткость основной упругой связи;
Со - жесткость виброизолирующей упругой связи;
инерционный вибратор подключен к устройству управления колебаниями рабочего органа, на рабочем органе установлен датчик колебаний, выход которого подключен к входу устройства управления колебаниями рабочего органа, при этом устройство управления колебаниями рабочего органа выполнено с возможностью обработки сигнала датчика колебаний, сравнения его с заданным опорным сигналом и формирования сигнала управления инерционным вибратором по угловой частоте возмущающей периодической силы, а также с возможностью работы в двух режимах: режиме ручной настройки колебаний рабочего органа и режиме автоматического поддержания заданных колебаний рабочего органа.
Применение предложенных совокупностей существенных признаков позволяет получить новый технический результат: получить резонансные механические колебания рабочего органа вибрационной установки без применения реактивной массы с возможностью поддержания заданных колебаний рабочего органа при технологических изменениях его массы.
Анализ уровня техники в области вибрационной техники показал, что предложенные в способе и устройстве для его осуществления совокупности существенных признаков являются новыми, явным образом не следуют из уровня техники и таким образом, предлагаемое изобретение является новым и имеет изобретательский уровень.
Сущность изобретения поясняется чертежом, на котором показана принципиальная схема устройства для осуществления способа получения и поддержания резонансных механических колебаний. Устройство содержит рабочий орган 1, который через виброизолирующую упругую связь 2 соединен с основанием 3. Инерционный вибратор 4 связан с рабочим органом через основную упругую связь 5. Инерционный вибратор подключен к устройству управления колебаниями рабочего органа (УУ) 6. На рабочем органе установлен датчик колебаний 7, выход которого подключен к каналу управления УУ.
Устройство работает следующим образом. Инерционный вибратор 4 настраивают на заведомо меньшую амплитуду возмущающей периодической силы, чем требуется в номинальном режиме работы вибрационной установки. При максимальном значении массы рабочего органа 1 включают инерционный вибратор 4 и создают в области номинальной угловой частоты возмущающую периодическую силу, которая через основную упругую связь 5 передается к рабочему органу 1. Возникающие при этом резонансные колебания рабочего органа 1 настраивают на максимальную амплитуду с помощью УУ 6 путем совмещения угловой частоты возмущающей периодической силы с угловой частотой резонансных колебаний рабочего органа в колебательной системе "основание - виброизолирующая упругая связь - масса рабочего органа - основная упругая связь - инерционный вибратор". Измеряют колебания рабочего органа 1 и подбирают амплитуду возмущающей периодической силы, при которой достигается требуемое максимальное значение заданного параметра резонансных колебаний: амплитуды или виброускорения рабочего органа. Инерционный вибратор 4 настраивают на выбранное значение амплитуды возмущающей периодической силы. На этом заканчивается подготовка устройства к работе. Далее в соответствии с требованиями технологии, осуществляемой с помощью вибрационной установки, настраивают УУ 6 на заданные колебания рабочего органа. После этого переключают УУ 6 в режим автоматического поддержания заданных колебаний рабочего органа. При этом сигнал датчика колебаний 7 обрабатывается в УУ 6 и сравнивается с заданным опорным сигналом. Полученный сигнал ошибки обрабатывается и формируется выходной сигнал УУ 6, который изменяет соответствующим образом угловую частоту возмущающей периодической силы. Благодаря обратной связи обеспечивается поддержание резонансных механических колебаний рабочего органа вибрационной установки независимо от технологических изменений массы рабочего органа.
Способ получения и поддержания резонансных механических колебаний осуществляется следующим образом. Физико-механическая сущность действий, выполняемых при осуществлении способа, поясняется анализом условий, имеющих определяющее значение для реализации способа.
Первое условие: рабочий орган необходимо подвесить в пространстве на упругой связи, которая практически не должна оказывать влияния на вынужденные колебания рабочего органа, возбуждаемые возмущающей периодической силой. Очевидно, что это условие может быть выполнено, если рабочий орган будет связан с основанием виброизолирующей упругой связью, отличительной особенностью которой является низкая жесткость (см. стр.102 и 178 в книге: Ивович В.А., Онищенко В.Я. Защита от вибрации в машиностроении. - М.: Машиностроение, 1990. - 272 с.: ил.).
Второе условие: действие возмущающей периодической силы необходимо передавать рабочему органу через упругую связь (назовем ее основной упругой связью). Если это условие не будет выполнено, то рабочий орган может совершать резонансные колебания только на виброизолирующей упругой связи. Однако эти колебания не могут быть приняты в качестве рабочих по причине низкой угловой частоты резонансных колебаний и, как следствие этого, - низкого значения создаваемого виброускорения. Возможность же увеличения амплитуды колебаний ограничена требованиями технологии, а также нарастающим динамическим воздействием рабочего органа на основание, что нарушает требования по виброизоляции.
Третье условие: необходимо обеспечить принудительные периодические перемещения конца основной упругой связи, соединенного с источником возмущающей периодической силы. Такие перемещения приведут к появлению динамических деформаций в основной упругой связи. При этом будет происходить периодическая передача механической энергии от источника возмущающей периодической силы к основной упругой связи. Как известно, запас потенциальной энергии в деформируемой упругой связи составляет
где u - потенциальная энергия в Дж;
С - жесткость упругой связи в Н/м;
a - амплитуда колебаний в м;
(см. стр.244 в книге: Справочник машиностроителя в трех томах. Том 3. Под ред. С.В.Серенсена и Н.С.Ачеркана. Гос. научно-техн. изд-во машиностроит. лит-ры. М., 1951, с.1098). Появление запаса потенциальной энергии в основной упругой связи (допустим, при ее сжатии) приведет к тому, что эта энергия, не имея со стороны массы рабочего органа ограничений по ее высвобождению, приведет в движение рабочий орган. Следовательно, начнется процесс перехода потенциальной энергии деформации основной упругой связи в кинетическую энергию движения рабочего органа. Поскольку конец основной упругой связи соединен с источником возмущающей периодической силы и, следовательно, совершает принудительные перемещения, то начавшееся движение рабочего органа прекратится, как только его кинетическая энергия перейдет в потенциальную энергию растяжения основной упругой связи. Благодаря взаимному переходу потенциальной и кинетической энергии начнется процесс вынужденных колебаний рабочего органа. Принципиально важное значение имеет то, что эти колебания будут определяться практически только жесткостью основной упругой связи и массой рабочего органа. Влиянием виброизолирующей упругой связи можно пренебречь, т.к. ее жесткость по требованиям виброизоляции должна быть более чем на порядок меньшей по сравнению с жесткостью основной упругой связи. Кроме того, при осуществлении предлагаемого способа соотношение жесткостей основной и виброизолирующей упругих связей многократно изменится и можно принять, что
C>>Co,
где С - жесткость основной упругой связи;
Со - жесткость виброизолирующей упругой связи.
Дело в том, что предлагаемый способ открывает возможность конструирования вибрационных установок на высокие частоты колебаний, что при значительных массах рабочих органов приводит к весьма высоким значениям жесткости основной упругой связи, на которой будут совершаться резонансные колебания. Например, для получения резонансных колебаний рабочего органа массой m=600 кг при частоте колебаний f=50 Гц требуется обеспечить жесткость основной упругой связи

Сопоставление полученного значения с жесткостью распространенных в вибрационных установках виброизолирующих упругих опор показывает, что различие в жесткости превышает два порядка. Например, жесткость виброизолирующих опор, используемых в вибросите СВ1Л для очистки бурового раствора (выпускаемого по ТУ 39-0147001-145-96), составляет Со≈42,4·104 Н/м. Принимая во внимание, что масса рамы вибрирующей указанного вибросита составляет около 600 кг, можно корректно сопоставить полученные значения жесткостей. Получаем C:Co=5916·104:42,4·104=139,5. Таким образом, жесткость виброизолирующей связи рабочего органа с основанием в предлагаемом способе практически не будет влиять на колебания рабочего органа.
Предложенный механизм возбуждения вынужденных колебаний массы, подвешенной в пространстве на виброизолирующей упругой связи, относительно конца основной упругой связи, получающего принудительные периодические перемещения (а не относительно основания или реактивной массы), согласуется с данными теории механических колебаний. Так, известна задача о поведении подобной колебательной системы, включающей массу m и упругий элемент жесткостью Сn, причем упругий элемент прикреплен с одной стороны к основанию, а с другой стороны соединен с массой. При этом рассматривается передача возбуждающей силы к массе через упругий элемент. Для этого условно принято, что закрепленный конец упругого элемента (т.е. основание) совершает принудительные периодические перемещения (см. стр.250-251 в книге: Справочник машиностроителя в трех томах. Том 3. Под ред. С.В.Серенсена и Н.С.Ачеркана. Гос. научно-техн. изд-во машиностроит. лит-ры. М., 1951, с.1098). Показано, что если перемещение конца упругого элемента происходит по закону
где X - перемещение;
r - амплитуда перемещения;
ω - угловая частота перемещения;
t - текущее время;
"то получается такое абсолютное перемещение массы m в пространстве, какое вызвала бы приложенная к ней внешняя сила Q
Q=Сn·r·sinωt при неподвижном закреплении конца упругого элемента.
Внешняя сила, создающая при неподвижном закреплении такую же динамическую деформацию упругого элемента, какая имеет место в рассматриваемой системе, равна Q=m·r·ω2·sinωt".
Таким образом, можно сделать вывод о том, что периодическое принудительное перемещение конца основной упругой связи будет возбуждать на этой же связи вынужденные колебания рабочего органа с параметрами, которые будут определяться практически только массой рабочего органа и жесткостью основной упругой связи. Практически такой способ осуществлен при кинематическом принудительном перемещении конца упругого элемента, передающего возбуждающую силу массе, связанной с основанием еще одним упругим элементом (см. стр.351 в книге: С.В.Серенсен и др. Динамика машин для испытаний на усталость. М.: Машиностроение, 1967). Для обоснования заявляемого способа приведенная ссылка важна тем, что авторами указанной работы экспериментально было установлено, что колебательная система "основание - упругая связь жесткостью С1 - масса m - упругая связь жесткостью С2 - узел кинематического принудительного периодического перемещения конца упругой связи, опирающийся на основание с другой стороны" имеет две резонансные угловые частоты ω1 и ω2, определяемые по формулам:

Применительно к предлагаемому способу C2>>C1, что приводит к формуле для определения угловой частоты резонансных колебаний рабочего органа относительно инерционного вибратора
где ω - угловая частота резонансных колебаний рабочего органа в рад/с;
С - жесткость основной упругой связи в Н/м;
m - масса рабочего органа в кг.
Четвертое условие: необходимо обеспечить возможность выполнения третьего условия без опоры источника возмущающей периодической силы на основание или реактивную массу. Это условие может быть выполнено практически только при использовании источника возмущающей силы инерционной природы. Как известно, силы инерции обусловлены не взаимодействием тел, а свойствами самих неинерциальных систем отсчета (см. стр.48-52 в книге: Иродов И.Е. Основные законы механики: Учебн. пособие для вузов. - 2-е изд., перераб. - М.: Высшая школа, 1978. - 240 с., ил.). Очевидно, что данное условие может быть выполнено при использовании центробежных вибраторов или вибраторов с возвратно-поступательным движением массы.
Пятое условие: необходимо обеспечить возможность плавного совмещения угловых частот возмущающей периодической силы и собственных колебаний рабочего органа для получения режима резонанса, а также для регулирования амплитуды резонансных колебаний при настройке установки на требуемый режим работы. В предлагаемом способе данное условие выполняется путем изменения угловой частоты возмущающей периодической силы инерции.
Шестое условие: для поддержания заданных колебаний рабочего органа при технологических изменениях его массы необходима система автоматического регулирования колебаний рабочего органа с обратной связью. В предлагаемом способе такая система предусмотрена.
Для осуществления способа выполняют следующие действия. Рабочий орган вибрационной установки подвешивают в пространстве на виброизолирующей упругой связи с основанием. Источник возмущающей периодической силы инерции настраивают на заведомо меньшую амплитуду создаваемой силы, чем требуется для достижения максимальной заданной амплитуды колебаний рабочего органа. Загружают массу рабочего органа до максимального значения. Создают возмущающую периодическую силу инерции, действие которой передают рабочему органу через основную упругую связь. Изменяют угловую частоту возмущающей периодической силы инерции в области угловой частоты резонансных колебаний рабочего органа, которую предварительно определяют по формуле
где ω - угловая частота резонансных колебаний рабочего органа в рад/с;
С - жесткость основной упругой связи в Н/м;
m - масса рабочего органа в кг.
Настраивают угловую частоту возмущающей периодической силы инерции на режим получения резонансных колебаний рабочего органа с максимальной амплитудой. При этой настройке проводят корректировку амплитуды возмущающей периодической силы инерции исходя из необходимости обеспечения максимальной заданной амплитуды колебаний рабочего органа. Изменяют угловую частоту возмущающей периодической силы инерции в области частот восходящей части резонансной кривой и настраивают амплитуду колебаний рабочего органа, заданную по технологии, для осуществления которой используется вибрационная установка. Измеряют колебания рабочего органа, сигнал измерения обрабатывают, сравнивают с опорным сигналом, задающим требуемую амплитуду колебаний рабочего органа. Полученный сигнал ошибки используют в качестве сигнала, управляющего угловой частотой возмущающей периодической силой инерции.
Данный способ в сравнении с прототипом имеет преимущество, т.к. позволяет получать резонансные механические колебания рабочего органа вибрационной установки без применения реактивной массы с возможностью поддержания заданных колебаний рабочего органа при технологических изменениях его массы.
Для проверки возможности практического осуществления способа была изготовлена по схеме устройства для реализации способа модель устройства со следующими данными: масса инерционного лабораторного вибратора, выполненного на базе электромотора постоянного тока, mВ=1,5 кг; масса, имитирующая рабочий орган, выбиралась по распространенному на практике соотношению m≥10mВ принято m=15 кг; соотношение жесткостей основной и виброизолирующей упругих связей выбиралось с учетом требования виброизоляции (см. стр.102 в книге В.А.Ивович, В.Я.Онищенко. Защита от вибрации в машиностроении. М.: Машиностроение, 1990), при этом для С=20·10-4 Н/м жесткость виброизолирующей связи была выбрана равной Со=1,2·104 Н/м. Устройство управления колебаниями рабочего органа было выполнено на основе усилителя постоянного тока и содержало также блоки обработки сигнала датчика колебаний, задатчик опорного сигнала и сравнивающее устройство. В качестве датчика колебаний использовали пьезокерамический датчик детонации, применяемый на двигателях современных автомобилей.
Эксперименты показали, что колебательная система имеет три резонансные угловые частоты: низшую ωн=27 рад/с (проявляется при резонансе колебаний массы "рабочего органа" совместно с массой вибратора на виброизолирующей связи относительно основания), среднюю ωc=119 рад/с (проявляется при резонансе колебаний массы "рабочего органа" на основной упругой связи относительно вибратора), высшую ωв=365 рад/с (проявляется при резонансе колебаний массы вибратора на основной упругой связи относительно массы "рабочего органа").
Таким образом, наличие средней резонансной угловой частоты подтверждает возможность получения резонансных механических колебаний рабочего органа относительно инерционного вибратора, т.е. без применения реактивной массы.
Эксперименты показали также практическую возможность поддержания заданных колебаний "рабочего органа" путем изменения угловой частоты возмущающей силы, - при изменениях массы "рабочего органа" до 30% отклонение амплитуды колебаний не превышало 5%.
Таким образом, предложенное изобретение промышленно применимо.
Изобретение относится к вибрационной технике и может быть использовано в различных отраслях промышленности. Технический результат направлен на получение резонансных механических колебаний рабочего органа вибрационной установки относительно источника возмущающей периодической силы инерции без применения реактивной массы с возможностью поддержания заданных колебаний рабочего органа при технологических изменениях его массы. Способ получения и поддержания резонансных механических колебаний заключается в том, что на рабочий орган вибрационной установки воздействуют возмущающей периодической силой, угловые частоты возмущающей периодической силы и собственных колебаний рабочего органа в колебательной системе настраивают в режим резонансных колебаний, причем возмущающую периодическую силу передают рабочему органу через основную упругую связь, в качестве возмущающей периодической силы применяют возмущающую периодическую силу инерции, рабочий орган подвешивают в пространстве на виброизолирующей упругой связи с основанием, резонансные колебания рабочего органа возбуждают на основной упругой связи относительно источника возмущающей периодической силы инерции. Указанный способ реализован соответствующим устройством. 2 н.п. ф-лы, 1 ил.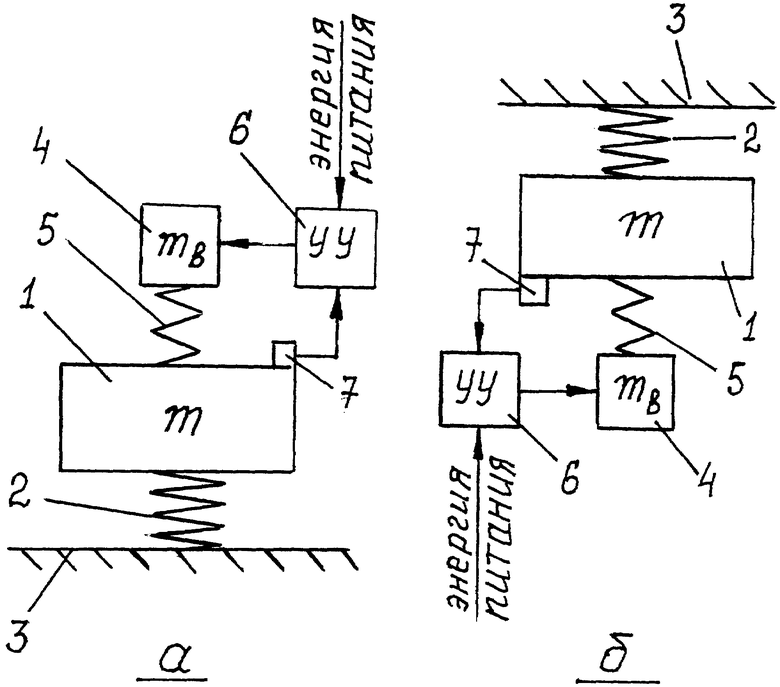

где ω - угловая частота резонансных колебаний рабочего органа, рад/с;
С - жесткость основной упругой связи, H/м;
m - масса рабочего органа, кг;
изменяют угловую частоту возмущающей периодической силы инерции в области частот восходящей части резонансной кривой и настраивают амплитуду колебаний рабочего органа, заданную по технологии, для осуществления которой используется вибрационная установка, измеряют колебания рабочего органа, сигнал измерения колебаний обрабатывают, сравнивают с опорным сигналом, задающим амплитуду колебаний рабочего органа, полученный сигнал ошибки используют в качестве сигнала, управляющего угловой частотой возмущающей периодической силы инерции.
где С - жесткость основной упругой связи, Н/м;
ωн - номинальная угловая частота возмущающей силы инерционного вибратора, рад/с;
mн - номинальная масса рабочего органа, кг;
жесткости основной и виброизолирующей упругих связей связаны соотношением
С>>Со,
где С - жесткость основной упругой связи;
Со - жесткость виброизолирующей упругой связи;
инерционный вибратор подключен к устройству управления колебаниями рабочего органа, на рабочем органе установлен датчик колебаний, выход которого подключен к входу устройства управления колебаниями рабочего органа, при этом устройство управления колебаниями рабочего органа выполнено с возможностью обработки сигнала датчика колебаний, сравнения его с заданным опорным сигналом и формирования сигнала управления инерционным вибратором по угловой частоте возмущающей периодической силы, а также с возможностью работы в двух режимах: режиме ручной настройки колебаний рабочего органа и режиме автоматического поддержания заданных колебаний рабочего органа.
| Способ возбуждения резонансных колебаний механических систем и устройство для его осуществления | 1988 |
|
SU1609515A1 |
| Способ поддержания резонансных колебаний механической системы и устройство для его осуществления | 1989 |
|
SU1726055A1 |
| Способ возбуждения колебаний | 1984 |
|
SU1269854A1 |
| Способ возбуждения круговых колебаний и устройство для его осуществления | 1988 |
|
SU1664412A1 |
| Способ остановки вибровозбудителя,включающего ведомые и ведущие дебалансы,и устройство для его осуществления | 1985 |
|
SU1292846A1 |

