Изобретение относится к измерительной технике и может быть применено для бесконтактного определения состояния поверхности дорожного полотна, на котором возможно образование слоя воды, снега или льда.
Известны микроволновые способы определения состояния дорожного покрытия (US 4690553, 01.09.1987; US 5686841, 11.11.1997; Hertl S., Schaffar G.,  H. Contactless determination of the properties of water films on road // Journal of Physics E.: Scientific Instruments. 1988. Vol. 21. N. 10. P. 955-958). Эти способы и реализующие их устройства позволяют производить бесконтактные измерения, определять и идентифицировать наличие воды, снега или льда на поверхности дорожного полотна и измерять их толщину. Однако известные способы имеют существенный недостаток: они не обеспечивают высокую точность измерения толщины слоя вещества (воды, снега или льда), который может быть очень тонким. Кроме того, эти способы достаточно сложны и имеют высокую стоимость реализации.
H. Contactless determination of the properties of water films on road // Journal of Physics E.: Scientific Instruments. 1988. Vol. 21. N. 10. P. 955-958). Эти способы и реализующие их устройства позволяют производить бесконтактные измерения, определять и идентифицировать наличие воды, снега или льда на поверхности дорожного полотна и измерять их толщину. Однако известные способы имеют существенный недостаток: они не обеспечивают высокую точность измерения толщины слоя вещества (воды, снега или льда), который может быть очень тонким. Кроме того, эти способы достаточно сложны и имеют высокую стоимость реализации.
Известен также способ (US 5497100, 05.03.1996), который заключается в зондировании поверхности дороги частотно-модулированными электромагнитными волнами, приеме отраженных волн, получении множества значений амплитуд разностных сигналов, соответствующих принимаемым и излучаемым волнам, сравнении данного множества с множеством известных моделей поверхности и определении состояния дороги по результатам этого сравнения. Данный способ характеризуется невысокой точностью и сложен в реализации: процесс получения полезной информации связан со сложной функциональной обработкой принимаемых сигналов.
Известно также техническое решение (RU 2473888 C1, 27.01.2013), которое заключается в зондировании поверхности дороги частотно-модулированными электромагнитными волнами, приеме отраженных волн, встраивании в поверхностный слой контролируемого участка дороги резонатора с изменяющейся в соответствии с состоянием дороги резонансной частотой электромагнитных колебаний, которые возбуждают в нем зондирующими электромагнитными волнами, измерении мощности отраженных от резонатора и принимаемых электромагнитных волн и по суждении о состоянии поверхности дороги по величине частоты, соответствующей минимуму принимаемой мощности. При этом диапазон изменения частоты зондирующих электромагнитных волн выбирают из условия его превышения диапазона возможных значений резонансной частоты резонатора, соответствующих определяемому состоянию поверхности дороги. Данный способ, как и вышеупомянутые способы, сложен в реализации: процесс получения полезной информации связан с применением генератора частотно-модулированных колебаний, со сложной функциональной обработкой принимаемых сигналов.
Известно также техническое решение (US 3836846, 17.09.1974), которое по технической сущности наиболее близко к предлагаемому способу и принято в качестве прототипа. Этот способ-прототип заключается в зондировании поверхности дороги электромагнитными волнами, возбуждаемыми в волноводе, размещаемом под контролируемой поверхностью, с одного из его торцевых участков, который встраивают в поверхностный слой контролируемого участка дороги, и определении одной из характеристик, а именно амплитуды, стоячей волны в волноводе, (см. фиг. 2 данного технического решения). В отсутствие слоя воды, снега, льда и т.п. на поверхности дороги отражение от торца волновода мало, но при наличии такого слоя амплитуда стоячей волны возрастает и несет информацию о состоянии поверхности - толщине и характере слоя осажденного вещества. Однако этот способ, связанный с проведением амплитудных измерений, не характеризуется высокой точностью измерения: амплитуда принимаемого сигнала - информативный параметр - зависит не только от полезной информации о состоянии поверхности дороги, но и от различных влияющих факторов (изменений мощности генератора, температуры и др.), т.е. имеет недостатки, присущие амплитудным изменениям.
Этот способ подразумевает наличие эталонной информации о состоянии поверхности дороги, соответствующей отсутствию какого-либо слоя вещества (воды, льда, снега и др.) на ее поверхности. Текущая информация о состоянии поверхности дороги подлежит сравнению с данной эталонной информацией в блоке сравнения измерительных устройств, реализующих этот способ, и суждении о состоянии поверхности дороги при сравнении этих данных, что усложняет данный способ.
Техническим результатом настоящего изобретения является повышение точности и упрощение процесса определения состояния поверхности дороги.
Технический результат в предлагаемом способе определения состояния поверхности дороги достигается тем, что контролируемый участок поверхности дороги зондируют электромагнитными волнами, возбуждаемыми в волноводе, размещаемом под контролируемой поверхностью, с одного из его торцевых участков, который встраивают в поверхностный слой контролируемого участка дороги, и определяют одну из характеристик стоячей волны в волноводе. При этом с другого торцевого участка волновода зондируют электромагнитными волнами поверхность, идентичную участку поверхности дороги с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги. В качестве поверхности, зондируемой с другого торцевого участка волновода, может быть использован участок поверхности дороги с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги, а данный торцевой участок волновода встраивают в поверхностный слой этого участка поверхности дороги.
Предлагаемый способ поясняется чертежами.
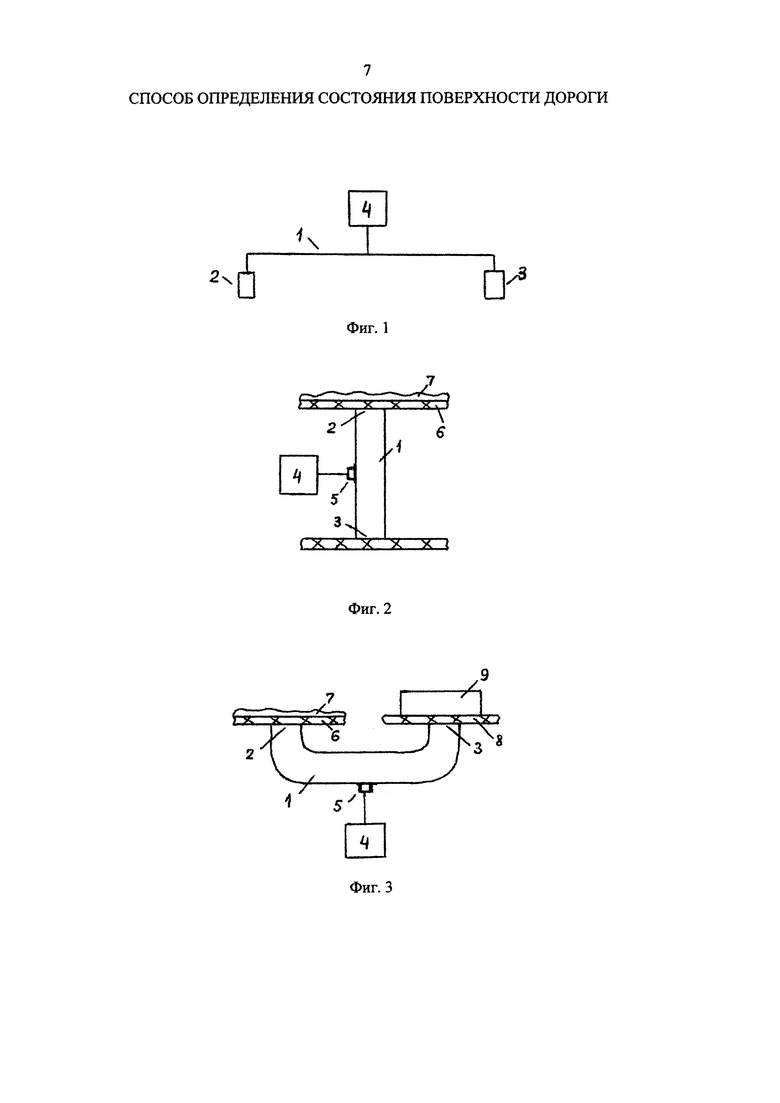
На фиг. 1 приведена функциональная схема, поясняющая способ.
На фиг. 2 и фиг. 3 приведены варианты функциональных схем устройств для реализации способа.
На чертежах показаны волновод 1 с торцевыми участками 2 и 3, электронный блок 4, элемент связи 5, поверхность дороги 6, покрывающий слой 7, идентичный участок поверхности дороги 8, защитный кожух 9.
Сущность предлагаемого способа состоит в следующем.
Согласно данному способу контролируемый участок поверхности дороги зондируют электромагнитными волнами, возбуждаемыми в волноводе, размещаемом под контролируемой поверхностью, с одного из его торцевых участков, который встраивают в поверхностный слой контролируемого участка дороги, и определяют одну из характеристик стоячей волны в волноводе. При этом с другого торцевого участка волновода зондируют электромагнитными волнами поверхность, идентичную участку поверхности дороги с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги.
В данном случае стоячая волна в волноводе образуется вследствие отражений как от одного, так и от другого торцов волновода. В этом случае данный волновод является волноводным резонатором, в котором при совпадении частоты зондирующих волн (частоты генератора) с одной из частот - резонансных частот, на которой имеет место стоячая волна, существуют электромагнитные колебания. Измеряя резонансную частоту электромагнитных колебаний такого волноводного резонатора, можно судить о состоянии поверхности дороги.
При появлении на поверхности дороги слоя какого-либо вещества (воды, снега, льда и др.), то есть при отклонении резонансной частоты данного волноводного резонатора от ее эталонного значения, соответствующего отсутствию такого слоя вещества, в волноводном резонаторе происходит изменение картины распределения поля стоячей волны с соответствующим изменением значений резонансной частоты.
Данный волноводный резонатор образован волноводом 1 и размещенными на его торцах идентичными чувствительными элементами - торцевыми участками 2 и 3 (фиг. 1). В их электромагнитном поле помещены объекты с соответственно текущим (измеряемым) и эталонным значениями измеряемого параметра - толщины x слоя воды, снега или льда на поверхности дорожного полотна. Каждому значению x соответствует значение сопротивления Zн(x) чувствительного элемента, в общем случае комплексного сопротивления. При равенстве измеряемой величины x ее эталонному значению x0 (x=x0=0) Zн(x)=Zн(xq). При отличии x от x0 в волноводном резонаторе происходит изменение картины распределения поля стоячей волны с соответствующим изменением значений информативного параметра - одной из резонансных (собственных) частот  электромагнитных колебаний рассматриваемого волноводного резонатора. Эта резонансная частота изменяется в зависимости от толщины покрывающего поверхность дороги слоя. Она также зависит и от электрофизических параметров, в частности диэлектрической проницаемости покрывающего слоя (воды, льда или снега).
электромагнитных колебаний рассматриваемого волноводного резонатора. Эта резонансная частота изменяется в зависимости от толщины покрывающего поверхность дороги слоя. Она также зависит и от электрофизических параметров, в частности диэлектрической проницаемости покрывающего слоя (воды, льда или снега).
На фиг. 2 приведена функциональная схема устройства для реализации данного способа (первый вариант). К волноводному резонатору, образованному волноводом 1 и размещенными на его торцах чувствительными элементами - торцевыми участками 2 и 3, подсоединен электронный блок 4 с помощью элемента связи 5 для возбуждения в данном волноводном резонаторе колебаний и измерения одного из его информативных параметров, в частности, резонансной частоты электромагнитных колебаний. Данный электронный блок, изображенный здесь схематично в виде одного блока, может представлять собой также совокупность отдельных элементов и блоков для возбуждения в волноводном резонаторе колебаний, их съема и измерения информативного параметра (Лебедев И.В. Техника и приборы СВЧ. Т. 1. М.: Высшая школа. 1970. 440 с.). Волновод 1 размещают под контролируемой поверхностью дороги 6 с возможным покрывающим слоем 7. Один из его торцевых участков 2 встраивают снизу в поверхностный слой дороги на ее контролируемом участке. При этом с другого торцевого участка 3 волновода 1 зондируют электромагнитными волнами идентичный участок поверхности дороги 8 с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги. По величине информативного параметра, в частности основной резонансной частоты  электромагнитных колебаний данного волноводного резонатора, судят о состоянии поверхности дороги.
электромагнитных колебаний данного волноводного резонатора, судят о состоянии поверхности дороги.
На фиг. 3 приведена функциональная схема устройства для реализации данного способа (второй вариант), у которого как первый торцевой участок 2 волновода 1, так и его второй торцевой участок 3 встроены снизу в поверхность дороги. При этом в качестве поверхности, зондируемой с другого торцевого участка 3 волновода 1, используют участок поверхности дороги 8 с эталонными значениями ее состояния, соответствующими отсутствию на поверхности дороги покрывающего слоя 7. Для защиты этого участка дороги от присутствия на нем какого-либо поверхностного слоя вещества (воды, снега, льда и др.) в схеме устройства предусмотрено наличие защитного кожуха 9.
Данное устройство может быть применено для определения состояния поверхности дороги 6 (например, асфальта) с возможным покрывающим слоем 7 воды, льда или снега посредством определения резонансной частоты .
Для определения состояния поверхности дороги, обусловленного наличием на ее поверхности слоя осадков или его отсутствием, необходимо знать электрофизические параметры возможных веществ на его поверхности - воды, снега и льда в СВЧ-диапазоне частот электромагнитных волн. Поскольку электрофизические параметры воды, снега и льда существенно отличаются от единицы (что соответствует отсутствию такого слоя на дороге) и друг от друга (Nyfors E.G., Vainikainen P. Industrial microwave sensors. Artech House, Inc. 1989. 351 p.), то значения резонансной частоты электромагнитных колебаний и диапазон изменения существенно отличаются при наличии того или иного слоя на поверхности дороги или при его отсутствии. Это позволяет определить, какой вид слоя осадков (вода, снег или лед) присутствует на дороге (или отсутствует), а также, по величине изменения , найти его толщину.
Таким образом, данный способ позволяет достаточно просто и с высокой точностью определять состояние поверхности дороги. Он дает возможность фиксировать наличие или отсутствие на поверхности дороги слоя воды, снега или льда и производить их идентификацию.
Изобретение относится к измерительной технике и может быть применено для определения состояния поверхности дорожного полотна, на котором возможно образование слоя воды, снега или льда. Техническим результатом является повышение точности и упрощение процесса определения состояния поверхности дороги. Контролируемый участок поверхности дороги зондируют электромагнитными волнами, возбуждаемыми в волноводе, размещаемом под контролируемой поверхностью, с одного из его торцевых участков, который встраивают в поверхностный слой контролируемого участка дороги, и определяют одну из характеристик стоячей волны в волноводе. С другого торцевого участка волновода зондируют электромагнитными волнами поверхность, идентичную участку поверхности дороги с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги. В качестве поверхности, зондируемой с другого торцевого участка волновода, может быть использован участок поверхности дороги с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги, а данный торцевой участок волновода встраивают в поверхностный слой этого участка поверхности дороги. 1 з.п. ф-лы, 3 ил.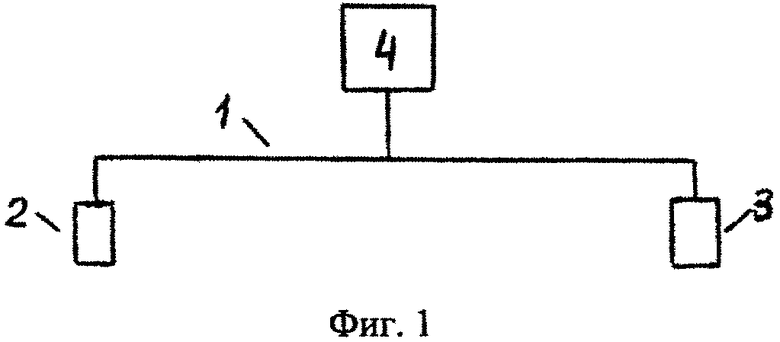
1. Способ определения состояния поверхности дороги, при котором контролируемый участок поверхности дороги зондируют электромагнитными волнами, возбуждаемыми в волноводе, размещаемом под контролируемой поверхностью, с одного из его торцевых участков, который встраивают в поверхностный слой контролируемого участка дороги, и определяют одну из характеристик стоячей волны в волноводе, отличающийся тем, что с другого торцевого участка волновода зондируют электромагнитными волнами поверхность, идентичную участку поверхности дороги с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги.
2. Способ по п. 1, отличающийся тем, что в качестве поверхности, зондируемой с другого торцевого участка волновода, используют участок поверхности дороги с эталонными значениями ее состояния, соответствующими отсутствию покрывающего слоя на поверхности дороги, а данный торцевой участок волновода встраивают в поверхностный слой этого участка поверхности дороги.
| US 3836846 A1, 17.09.1974 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ДОРОГИ | 2011 |
|
RU2473888C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ПОВЕРХНОСТИ ДОРОЖНОГО ПОКРЫТИЯ | 2004 |
|
RU2279665C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ДОРОГИ | 2014 |
|
RU2550778C1 |
| US 4690553 A1, 01.09.1987 | |||
| US 5497100 A1, 05.03.1996 | |||
| US 5686841 A, 11.11.1997. | |||

