УРОВЕНЬ ТЕХНИКИ
Углеводороды, такие как нефть и газ, как правило, добывают из подземных пластов, которые могут быть расположены на суше или в море. В большинстве случаев пласты расположены в тысячах футов под поверхностью, а ствол скважины должен пройти через пласт перед началом добычи углеводородов. Поскольку операции бурения скважин становятся все более сложными, и углеводородные пласты, соответственно, становятся более труднодоступными, повышается необходимость точного определения местонахождения буровой компоновки в пласте как вертикальной, так и горизонтальной. Бурение скважин для достижения пластов, представляющих интерес, в механических и эксплуатационных пределах системы бурения, при этом с высокой степенью точности и производительности, является тяжелым, но важным для рентабельности операции бурения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Некоторые конкретные типовые варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные графические материалы.
На фиг. 1 представлена схема, иллюстрирующая типовую систему бурения, в соответствии с аспектами настоящего изобретения.
На фиг. 2 представлена схема, иллюстрирующая типовую систему обработки информации, в соответствии с аспектами настоящего изобретения.
На фиг. 3 представлена схема, показывающая рельеф участка местности одновременно с разрезом земной коры типовой модели земных недр, в соответствии с аспектами настоящего изобретения.
На фиг. 4 представлена схема, иллюстрирующая типовой процесс генерирования эксплуатационных ограничений и выходных управляющих сигналов, в соответствии с аспектами настоящего изобретения.
На фиг. 5 представлена схема, иллюстрирующая типовую систему управления процессом, в соответствии с аспектами настоящего изобретения.
На фиг. 6 представлена примерная схема, иллюстрирующая систему управления для блока управления, в соответствии с аспектами настоящего изобретения.
На фиг. 7 представлена диаграмма, иллюстрирующая типовое эксплуатационное ограничение, относящееся к поворотам в бурильной колонне, в соответствии с аспектами настоящего изобретения.
На фиг. 8 представлена диаграмма, иллюстрирующая типовое эксплуатационное ограничение для предотвращения радиального биения бурового долота в скважине, в соответствии с аспектами настоящего изобретения.
На фиг. 9 проиллюстрирован типовой внутрискважинный инструмент, способный изменить один или более параметров бурения, в соответствии с аспектами настоящего изобретения.
На фиг. 10 проиллюстрирован типовой блок управления тягой, в соответствии с аспектами настоящего изобретения.
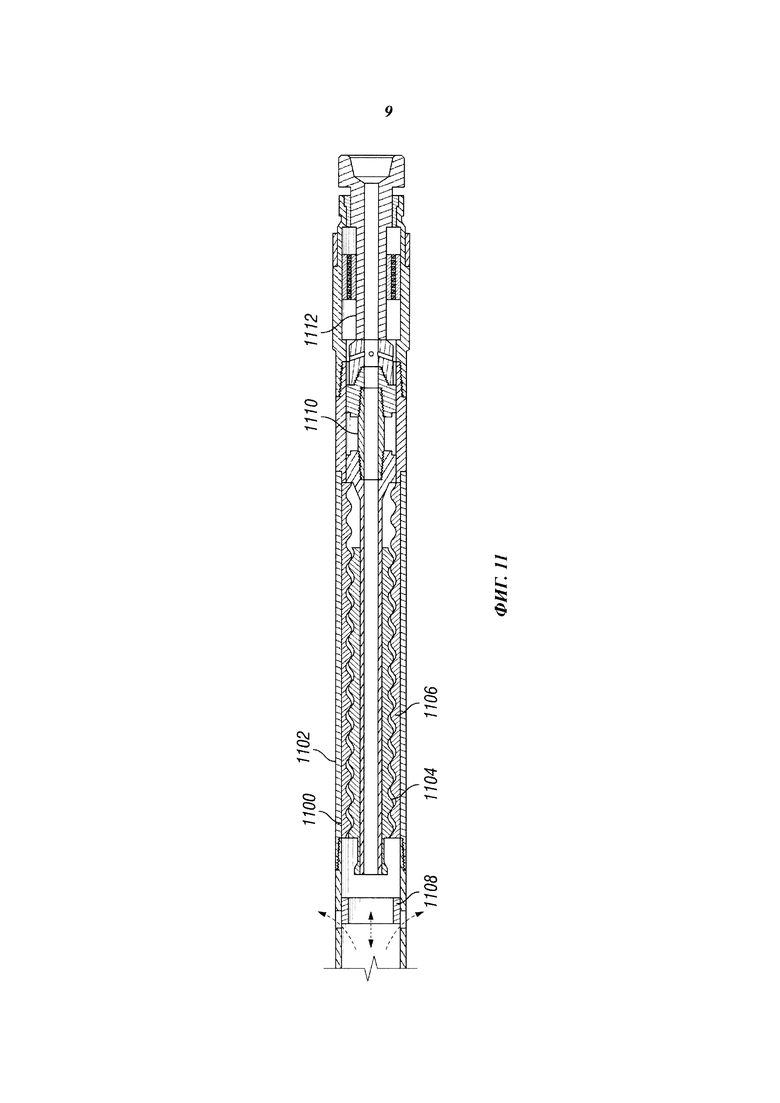
На фиг. 11 проиллюстрирован типовой забойный двигатель, в соответствии с аспектами настоящего изобретения.
Несмотря на то, что варианты реализации настоящего изобретения были проиллюстрированы, описаны и изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, которые станут понятны специалистам в данной отрасли и имеют преимущества данного изобретения. Проиллюстрированные и описанные варианты реализации настоящего изобретения приведены исключительно в целях иллюстрации и не ограничивают объем настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В контексте настоящего описания система обработки данных может содержать любые устройства или совокупность устройств, выполненных с возможностью вычисления, систематизации, обработки, передачи, получения, извлечения, создания, перенаправления, хранения, отображения, выдачи, обнаружения, записи, воспроизведения, управления или применения любой формы информации, оперативной информации или данных для бизнеса, научных целей, управления или других целей. Например, система обработки информации может являться персональным компьютером, сетевым устройством хранения данных или любым подходящим устройством и может иметь разный размер, форму, производительность, функциональность и стоимость. Система обработки данных может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов, производящих обработку, таких как центральный процессор (ЦП) или логическое устройство управления аппаратным или программным обеспечением, постоянное запоминающее устройство ПЗУ и/или другие типы энергонезависимого запоминающего устройства. Дополнительные компоненты системы обработки данных могут содержать одно или большее количество внешних запоминающих устройств, таких как дисковые запоминающие устройства, твердотельные накопители, такие как ОЗУ флеш-накопители, устройства облачного хранения в сети, один или большее количество сетевых портов для обмена данными с внешними устройствами, а также с различными устройствами ввода-вывода (I/O), такими как клавиатура, мышь и монитор. Система обработки данных может также содержать одну или большее количество шин, выполненных с возможностью обеспечения обмена данными между различными компонентами аппаратного обеспечения. Она также может содержать одну или большее количество интерфейсных устройств, способных передавать один или большее количество сигналов на автоматическое регулирующее устройство, привод или подобное устройство.
Для целей данного раскрытия машиночитаемый носитель может содержать любое устройство или совокупность устройств, способных хранить данные и/или команды в течение определенного периода времени. Читаемые компьютером носители могут включать, например, носитель данных, такой как запоминающее устройство с прямым доступом (например, жесткий диск или дискета), запоминающее устройство с последовательным доступом (например, магнитная лента), компакт диск, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и/или флеш-память, но не ограничиваются ими; а также средства коммуникации, такие как провода, оптоволокно, микроволны, радиоволны и другие электромагнитные и/или оптические носители; и/или сочетание перечисленного ранее.
Иллюстративные варианты реализации настоящего изобретения более подробно приведены в данном описании изобретения. Для ясности в настоящем описании могут быть приведены не все признаки фактической реализации. Конечно, следует понимать, что в разработке любого такого фактического варианта осуществления для достижения конкретных целей реализации выполняют многочисленные реализации конкретных решений, которые будут отличаться от одной реализации к другой. Кроме того, следует иметь в виду, что такая разработка может быть сложной и трудоемкой, но, тем не менее, благодаря настоящему описанию, быть повседневным делом для специалиста в данной области техники.
С целью лучшего понимания настоящего изобретения приведены следующие примеры конкретных вариантов реализации. Эти примеры не следует воспринимать как ограничивающие или определяющие объем изобретения. Варианты реализации настоящего изобретения могут быть применимы к горизонтальным, вертикальным, отклоненным или другим нелинейным стволам скважины в любом типе подземного пласта. Варианты реализации изобретения могут быть применимы к нагнетательным скважинам, а также добывающим скважинам, включая углеводородные скважины. Варианты осуществления могут быть реализованы с использованием инструмента, подходящего для тестирования, извлечения и отбора проб вдоль секций пласта. Варианты осуществления могут быть реализованы посредством инструментов, которые, например, могут быть переправлены через канал потока в колонне труб или с использованием кабеля, тросовой проволоки, колонны гибких труб, скважинного робота и т.п.
В контексте настоящего описания предполагается, что термин «соединены» или «соединен» обозначает непрямое либо прямое соединение. Таким образом, если первое устройство соединено со вторым устройством, такое соединение может быть осуществлено через прямое соединение или через непрямое механическое или электрическое соединение посредством других устройств и соединений. Аналогично термин "коммуникационно присоединенный" обозначает непрямое либо прямое коммуникационное присоединение. Такое соединение может быть проводным или беспроводным соединением, таким как, например, Ethernet или локальная вычислительная сеть (LAN). Данные проводные или беспроводные соединения хорошо известны специалистам в данной отрасли, поэтому они не будут подробно рассматриваться в контексте данного изобретения. Таким образом, если первое устройство коммуникационно присоединено ко второму устройству, такое соединение может быть осуществлено через прямое присоединение или через непрямое коммуникационное присоединение посредством других устройств и соединений.
Современные операции бурения и добычи нефти требуют информации относительно параметров и условий в скважине. Существует несколько способов сбора информации о скважине, включая каротаж во время бурения ("КВБ") и измерения во время бурения ("ИВБ"). При КВБ, данные обычно собирают во время процесса бурения, таким образом исключая необходимость удаления буровой компоновки для введения кабельного каротажного прибора. Следовательно, КВБ обеспечивает возможность оператору, осуществляющему бурение, вносить точные модификации или исправления в режиме реального времени для оптимизации производительности, при этом сводя к минимуму время простоя. Термин ИВБ обозначает измерение условий в скважине, относящихся к перемещению и расположению буровой компоновки во время продолжения бурения. КВБ более сконцентрирован на измерении параметров пласта. Хотя существуют различия между ИВБ и КВБ, термины ИВБ и КВБ часто используются взаимозаменяемо. В настоящем описании термин КВБ будет использован с пониманием того, что этот термин включает сбор параметров пласта и сбор информации, относящейся к перемещению и расположению буровой компоновки.
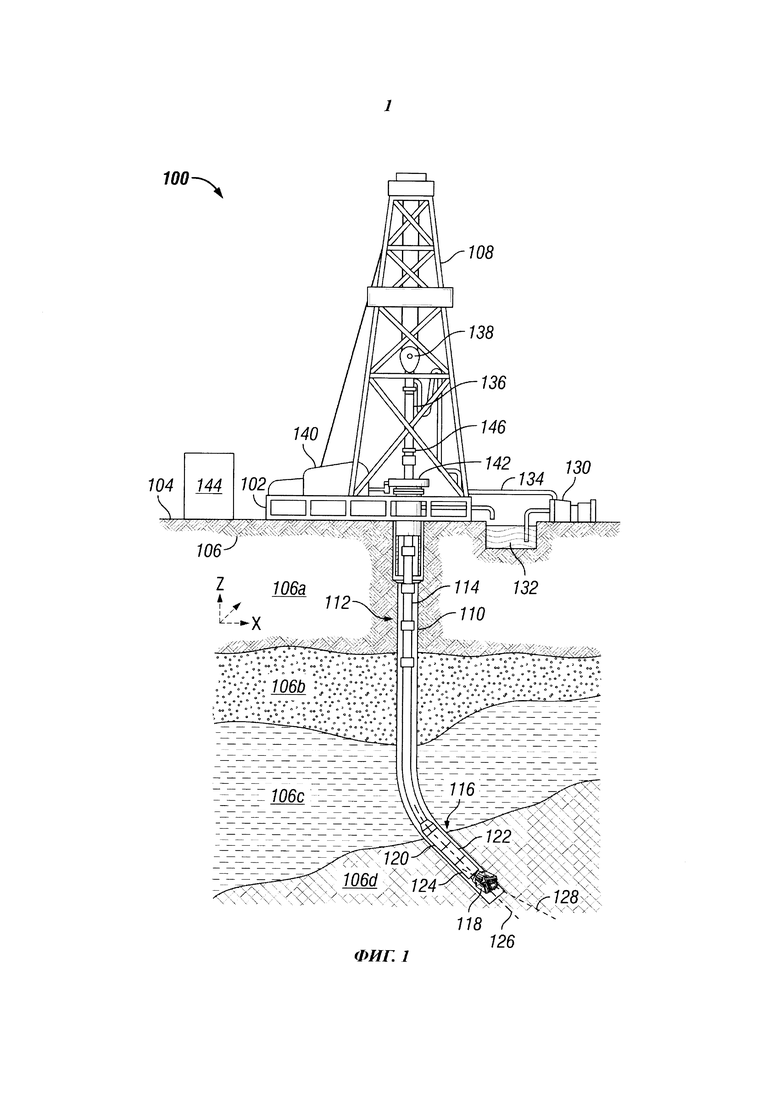
На фиг. 1 представлена схема, иллюстрирующая типовую систему бурения 100, в соответствии с аспектами настоящего изобретения. Система бурения 100 может содержать буровую платформу 102, расположенную на поверхности 104. В проиллюстрированном варианте реализации изобретения поверхность 102 содержит верхнюю часть пласта 106, содержащую одну или более породных толщин или слоев 106a-d. Несмотря на то, что на фиг. 1 поверхность 104 проиллюстрирована как участок земли, в некоторых вариантах реализации изобретения буровая платформа 102 может быть расположена в море, в таком случае поверхность 104 будет отделена от буровой платформы 102 массой воды.
Система бурения 100 может содержать буровую установку 108, установленную на буровую платформу 102 и расположенную над стволом скважины 110, находящимся внутри пласта 106. В проиллюстрированном варианте реализации изобретения буровая компоновка 112 может быть по меньшей мере частично размещена внутри ствола скважины 110 и присоединена к буровой установке 108. Буровая компоновка 112 может содержать бурильную колонну 114, компоновку низа бурильной колонны (КНБК) 116, и буровое долото 118. Бурильная колонна 114 может содержать множество участков бурильной трубы с резьбовым соединением. КНБК 116 может быть присоединена к бурильной колонне 114, а буровое долото 118 может быть присоединено к КНБК 116.
КНБК 116 может содержать устройства, такие как телеметрическая система 120 и элементы КВБ/ИВБ 122. Элементы КВБ/ИВБ 122 могут содержать внутрискважинные приборы – в том числе датчики, антенны, гравитометры, гироскопы, магнитометры, инерциальные измерительные блоки и т.д., которые могут непрерывно или периодически контролировать условия в скважине и измерять показатели скважины 110 и пласта 106, окружающего скважину 110. Элементы КВБ/ИВБ 122 могут дополнительно измерять угол торца долота внутрискважинных элементов, угловое положение внутрискважинных элементов относительно пласта 106. Такие значения измерений могут быть предусмотрены как данные измерений для процессора (например, как описано в фиг. 2 ниже). В некоторых вариантах реализации изобретения, информация, сгенерированная элементом КВБ/ИВБ 122, может быть передана в виде данных измерения на поверхность с использованием телеметрической системы 120. Телеметрическая система 120 может обеспечивать обмен данными с поверхностью через различные каналы, включая проводные и беспроводные каналы обмена данными, а также гидроимпульсы через буровой раствор внутри буровой компоновки 112.
В некоторых вариантах реализации изобретения КНБК 116 может дополнительно содержать блок управления 124. Блок управления 124 может быть присоединен к буровому долоту 118, может управлять любым направлением бурения буровой компоновки 112, управляя углом и ориентацией бурового долота относительно КНБК 116 и/или пласта 106. Угол и ориентация бурового долота 112 могут управляться блоком управления 124, например, посредством управления продольной осью 126 КНБК 116 наряду с продольной осью 128 бурового долота 118 относительно пласта 106 (например, размещение с отклонением долота) или путем управления продольной осью 128 бурового долота 118 относительно продольной оси 126 КНБК 116 (например, размещение с направлением долота).
В проиллюстрированных вариантах реализации изобретения продольная ось 128 бурового долота 118 смещена относительно продольной оси 126 КНБК 116. Продольная ось 128 бурового долота 118 может соответствовать направлению бурения буровой компоновки 112, т.e. направлению, при котором буровое долото 118 будет врезаться в пласт 106 при вращении. То есть, блок управления 124 может быть коммуникационно присоединен к телеметрической системе 120, а также к одному или более внутрискважинным и/или поверхностным автоматическим регулирующим устройствам, которые могут определять и обмениваться данными о направлении бурения для буровой компоновки 112 с блоком управления 128 .
Насос 130, расположенный на поверхности 104, может прокачивать буровой раствор со скоростью нагнетания (например, галлонов в минуту) из резервуара для раствора 132 через питающую трубу 134 к ведущей бурильной трубе 136, вниз по скважине через внутреннее пространство бурильной колонны 114, через отверстия в буровом долоте 118, обратно к поверхности через кольцевое пространство вокруг бурильной колонны 114, и в резервуар для раствора 132. Буровой раствор переносит буровой шлам из ствола скважины 110 в резервуар 132 и способствует сохранению целостности ствола скважины 110. Скорость нагнетания на насосе 130 может соответствовать скважинному расходу, отличающемуся от скорости нагнетания вследствие потери текучей среды внутри пласта 106. В некоторых вариантах реализации изобретения, КНБК 116 может содержать забойный двигатель с гидравлическим приводом (не показан), который преобразует поток бурового раствора во вращательный момент и крутящий момент, который используется для передачи движения буровому долоту 118. Крутящий момент, приложенный к буровому долоту 118 забойным двигателем, и результирующая скорость вращения бурового долота 118 могут основываться, по меньшей мере частично, на скорости нагнетания.
В некоторых вариантах реализации изобретения, участки буровой компоновки 112 могут быть подвешены от буровой установки 108 на крюке в сборе 138. Общая сила, опускающая крюк в сборе 138, может упоминаться как нагрузка на крюк, характеризующаяся весом соответствующей бурильной колонны 114, КНБК 116, бурового долота 118, и других элементов скважины, присоединенных к бурильной колонне 114 за вычетом любых сил, уменьшающих вес, таких как трение вдоль стенки ствола скважины 110 и подъемные силы, действующие на колонну бурильных труб 114, вызванные ее затоплением в буровом растворе. При контакте бурового долота 118 с нижней частью пласта 106, пласт 106 обеспечивает смещение некоторого веса буровой компоновки 112, и это смещение может соответствовать осевой нагрузке на долото (WOB) буровой компоновки 112. Крюк в сборе 138 может содержать индикатор веса, показывающий количество веса, подвешенного на крюке 138 в данный момент времени. В некоторых вариантах реализации изобретения, положение крюка в сборе 138 относительно буровой установки 108 и, следовательно, нагрузку на крюк и WOB можно изменять при помощи лебёдки 140, присоединенной к крюку в сборе 138.
Система бурения 100 может дополнительно содержать механизм верхнего силового привода или роторный стол 142. Бурильная колонна 114 может находиться по меньшей мере частично внутри роторного стола 142, который может сообщать крутящий момент и вращение к бурильной колонне 114 и приводит к вращению бурильной колонны 114. Крутящий момент и вращение, сообщаемые бурильной колонне 114, могут быть переданы на КНБК 116 и буровое долото 118, приводя их к вращению. Описанный выше крутящий момент на буровом долоте 118 вызванный роторным столом 142 и/или забойным двигателем, может быть обозначен как момент вращения долота (ТОВ), а скорость вращения бурового долота 118 может быть выражена в оборотах в минуту (RPM). Вращение бурового долота 118 может приводить к взаимодействию бурового долота 118 с пластом 106 или его забуриванию в пласт, и углублению ствола скважины 110. Возможны и другие конфигурации буровой компоновки.
В некоторых вариантах реализации изобретения, система бурения 100 может содержать блок управления 144, расположенный на поверхности 104. Узел управления 144 может содержать систему обработки данных, реализующую систему управления или алгоритм управления для системы бурения 100. Блок управления 144 может быть коммуникационно присоединен к одному или более регулируемым элементам системы бурения 100, включая насос 130, крюк в сборе 138/лебёдку 140, элементы КВБ/ИВБ 122, роторный стол 142, и блок управления 124. Регулируемые элементы могут содержать элементы буровой компоновки 112, которые отвечают на управляющие сигналы от блока управления 114 для изменения одного или более параметров бурения системы бурения 100, как будет описано ниже. Блок управления 144 может быть коммуникационно присоединен к поверхностным регулируемым элементам, например, посредством проводных или беспроводных соединений, а также может быть коммуникационно присоединен к забойным регулируемым элементам посредством телеметрической системы 120 и поверхностного приёмника 146. В некоторых вариантах реализации изобретения, система управления или алгоритм может обеспечивать генерирование и передачу блоком управления 124 сигналов управления к одному или более элементам системы бурения 100.
В некоторых вариантах реализации изобретения, блок управления 144 может принимать входные сигналы от системы бурения 100 и выпускать управляющие сигналы, основанные по меньшей мере частично на входных сигналах. Входные сигналы могут содержать данные измерений или запись показаний приборов в пласте от КНБК 116, в том числе прямые или косвенные значения измерений параметров бурения для буровой компоновки 112. Типовые параметры бурения включают ТОВ, WOB, скорость вращения бурового долота, угол торца долота, скорость потока и т.д. Управляющие сигналы могут быть направлены к элементам системы бурения 100, коммуникационно присоединенным к блоку управления 144, или к приводам или другим управляемым механизмам, содержащимся в данных элементах. В некоторых вариантах реализации изобретения, некоторые или все из управляемых элементов системы бурения 100 могут содержать ограниченные интегральные элементы управления или процессоры, выполненные с возможностью приема управляющего сигнала от блока управления 144 и создавать конкретную команду к соответствующим приводам или другим управляемым механизмам.
Управляющие сигналы, выпускаемые блоком управления, могут вызывать изменения одного или более параметров бурения элементами системы бурения 100, к которым для этого направляются управляющие сигналы. Например, управляющий сигнал, направленный к насосу 130, может вызвать изменение скорости нагнетания насоса, при которой буровой раствор перекачивается в бурильную колонну 114, которая в свою очередь может изменить скорость потока через забойный двигатель, присоединенный к буровому долоту 118, а также ТОВ и скорость вращения бурового долота 118. Управляющий сигнал, отправленный к крюку в сборе 138, может изменять нагрузку на крюк в сборе путем увеличения или уменьшения веса буровой установки, переносимого лебедкой 140, что может приводить к изменению WOB и TOB. Управляющий сигнал, отправленный к роторному столу 142, может изменять скорость вращения и крутящий момент роторного стола, приложенные к бурильной колонне 110, которые могут изменять TOB, скорость вращения бурового долота 118, и угол торца долота КНБК 116. Несмотря на то, что управляющие сигналы описаны выше по отношению к поверхностным элементам системы бурения 100, в некоторых вариантах реализации изобретения, как будет описано ниже, один или более забойных элементов могут принимать управляющие сигналы от автоматического регулирующего устройства и изменять один или более параметров бурения на основании управляющего сигнала. Другие типы управляющего сигнала будут понятны специалисту в данной отрасли при ознакомлении с настоящим описанием.
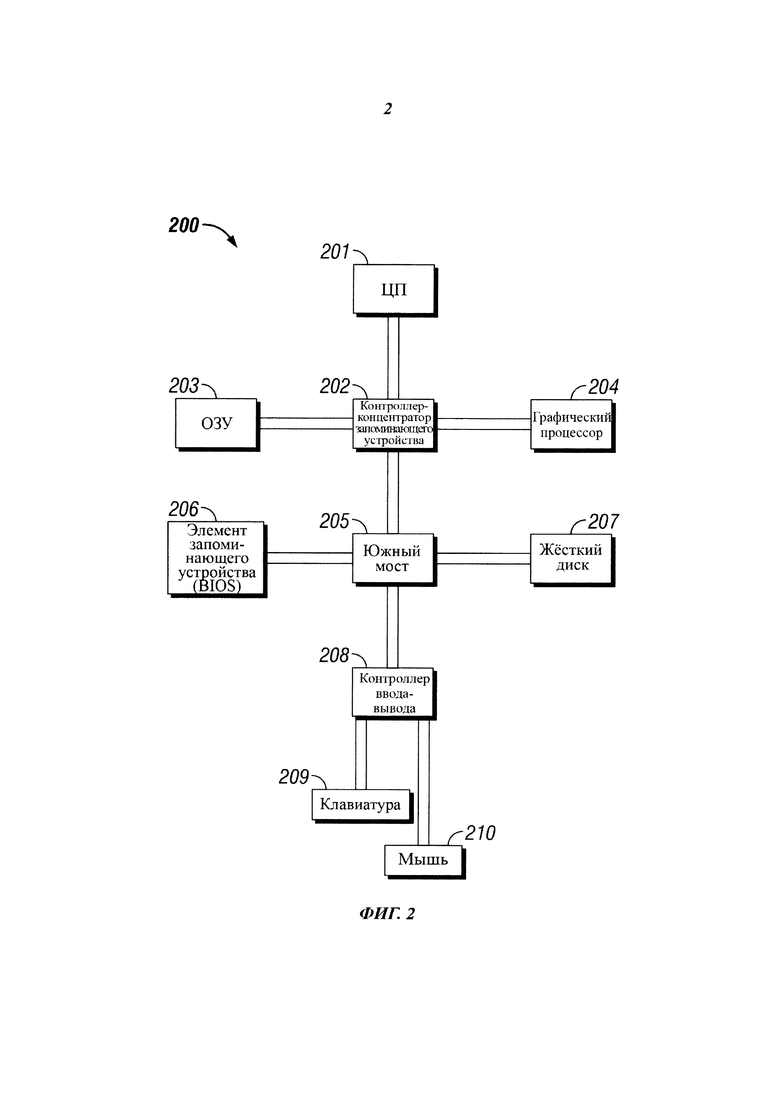
На фиг. 2 представлена схема, иллюстрирующая типовую систему обработки данных 200, в соответствии с аспектами настоящего изобретения. Система обработки данных 200 может применяться, например, как часть системы или блока управления для буровой компоновки, и может быть расположена на поверхности, в скважине (например, в стволе скважины), или частично на поверхности и частично в скважине. Например, оператор буровой установки может взаимодействовать с системой обработки данных 200, расположенной на поверхности, для изменения параметров бурения или для выдачи управляющих сигналов к регулируемым элементам системы бурения, коммуникационно присоединенным к системе обработки данных 200. В других вариантах реализации изобретения, система обработки данных 200 может автоматически генерировать управляющие сигналы, что приводит к изменению параметров бурения элементами системы бурения, основанному по меньшей мере частично на входных сигналах, принимаемых от забойных элементов, которые более подробно будут описаны ниже.
Система обработки данных 200 может содержать процессор или центральный процессор ЦП 201, коммуникационно присоединенный к контроллеру-концентратору запоминающего устройства или северному мосту 202. Контроллер-концентратор запоминающего устройства 202 может содержать контроллер запоминающего устройства для передачи информации к или от различных компонентов запоминающего устройства системы в пределах системы обработки данных, таких как, ОЗУ 203, элемент запоминающего устройства 206 и накопитель на жестких дисках 207. Контроллер-концентратор запоминающего устройства 202 может быть соединен с ОЗУ 203 и графическим процессором 204. Контроллер-концентратор запоминающего устройства 202 также может быть присоединен к контроллеру-концентратору ввода-вывода или южному мосту 205. Концентратор ввода-вывода 205 присоединен к элементам запоминающего устройства вычислительной системы, содержащей элемент 206 запоминающего устройства, который может содержать флэш-ПЗУ, которое содержит базовую систему ввода-вывода (BIOS) вычислительной системы. Концентратор ввода-вывода 205 также присоединен к накопителю на жестких дисках 207 вычислительной системы. Концентратор ввода-вывода 205 также может быть присоединен к сверхбольшой интегральной схеме 208 ввода-вывода, которая присоединена к нескольким портами ввода-вывода вычислительной системы, включая порты для подключения клавиатуры 209 и мыши 210. Система обработки данных 200 может быть дополнительно коммуникационно присоединена к одному или более элементам системы бурения посредством интегральной схемы 208. Система обработки данных 200 может содержать компоненты программного обеспечения, которые обрабатывают входные сигналы, и компоненты программного обеспечения, которые генерируют командные сигналы или управляющие сигналы, основанные по меньшей мере частично на входных сигналах. В контексте данного изобретения, программное обеспечение или компоненты программного обеспечения могут содержать набор команд, хранящийся в машиночитаемом носителе информации, исполнение которых процессором, присоединенным к машиночитаемому носителю информации, приводит к выполнению процессором определенных действий.
В соответствии с аспектами настоящего изобретения, блок управления может обнаруживать или принимать по меньшей мере одно эксплуатационное ограничение для буровой компоновки, и может генерировать и выпускать управляющие сигналы к элементам буровой компоновки, основанные по меньшей мере частично на эксплуатационном ограничении и принятых входящих данных. Эксплуатационные ограничения могут содержать диапазон значений параметров бурения или диапазон значений, имеющих отношение к параметрам бурения буровой компоновки. В дополнение к этому, эксплуатационные ограничения могут быть вычислены для того, чтобы буровая компоновка оставалась в физико-механических пределах элементов буровой компоновки, или для оптимизации работы буровой компоновки или элемента буровой компоновки.
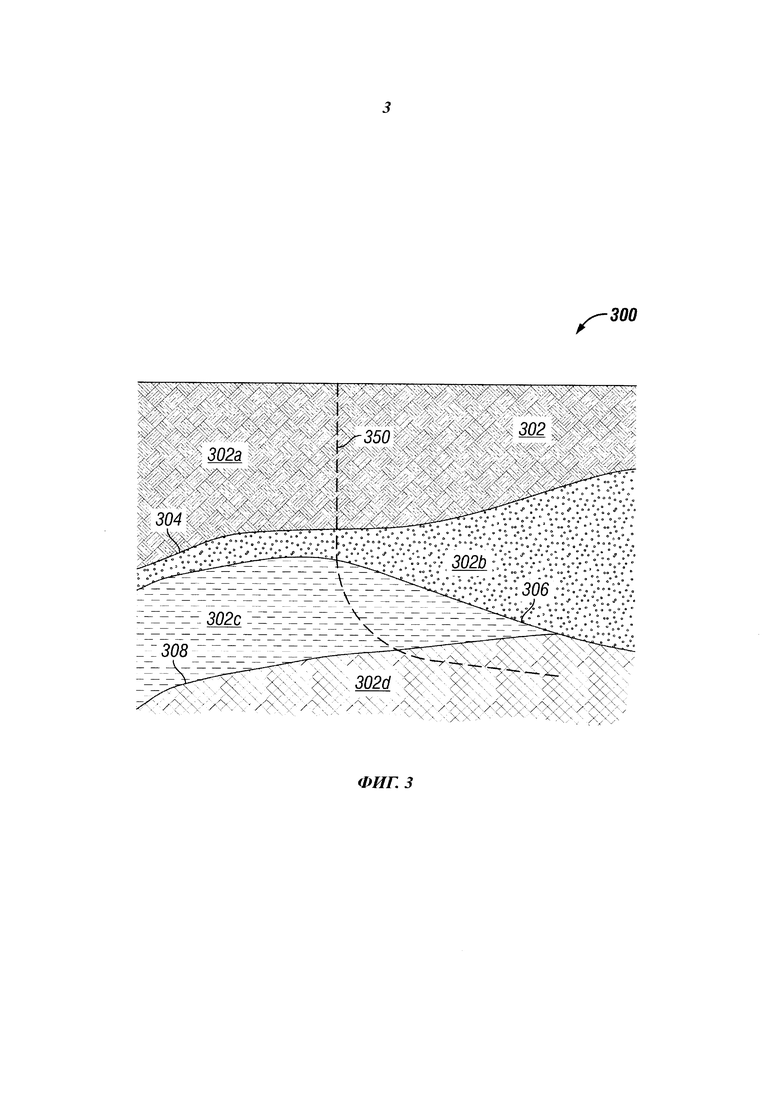
В некоторых вариантах реализации изобретения, эксплуатационные ограничения могут быть установлены с использованием по меньшей мере одного из указанных: модели земных недр и набора данных отклонения. На фиг. 3 представлена схема, показывающая рельеф участка местности одновременно с разрезом земной коры типовой модели земных недр 300, в соответствии с аспектами настоящего изобретения. Как можно увидеть, модель земных недр 300 содержит пласт 302 с отложениями пластов 302a-d, каждый из которых может содержать отличающийся от другого тип породы с различными механическими и электромагнитными характеристиками. Модель 300 может идентифицировать конкретные точки заложения скважины, ориентировки, литологические типы пород и особенности формирования пластов 302a-d, в том числе местоположения граничных поверхностей 304-308, отделяющих отложения пластов 302a-d. В некоторых вариантах реализации изобретения, модель 300 может быть получена на месте из записи показаний приборов и материалов обследования, в том числе, но не ограничиваясь только ими: акустических, электромагнитных и сейсмических данных обследования. Несмотря на то, что модель земных недр 300 проиллюстрирована в виде наглядного изображения в пояснительных целях, модель земных недр 300 также может содержать математическую модель.
В некоторых вариантах реализации изобретения, блок управления может внедрять данные отклонения в или использовать их в сочетании с моделью земных недр 300 при определении эксплуатационных ограничений для буровой компоновки. В контексте данного изобретения, данные отклонения могут содержать фактические показатели, зарегистрированные в ходе других операций бурения, которые сопоставляют типы породы и пласты с определенными инструментами и параметрами бурения. Данные отклонения могут, например, определять взаимосвязи крутящего момента между литологическими типами пород и буровыми долотами, пределы скорости бурового долота для конкретных типов пластов и т.д. Данные отклонения могут быть охарактеризованы литологическими типами пород, соответствующими данным, и связаны с теми литологическими типами породами, что в структуре модели 300. Следовательно, эксплуатационные ограничения, установленные с использованием как модели земных недр 300, так и набора данных отклонения, могут быть строго определенными для отложений пластов, каждое отложение пласта связанно с отличным от другого эксплуатационным ограничением или набором эксплуатационных ограничений.
На фиг. 3 дополнительно проиллюстрирован план бурения 350 внутри пласта 300. План бурения 350 может содержать заданную траекторию скважины, пробуренную в пласте 300. Модель 300 может применяться для определения где и когда скважина будет проходить через граничные поверхности 304-308, где и когда скважина будет вскрывать определенные типы геологических пластов в отложениях пластов 302a-d, параметров бурения внутри скважины, прогнозируемых когда буровая компоновка, следующая по плану бурения 350, находится в контакте с отложением пластов 302a-d, и эксплуатационных ограничений, применяемых при выпускании управляющих сигналов. Когда скважина бурится в соответствии с планом бурения 350, блок управления может выбрать эксплуатационное ограничение или набор эксплуатационных ограничений, связанный с отложением пластов, в котором размещена буровая компоновка в соответствии с моделью земных недр 300 и планом бурения 350, и может использовать выбранный набор эксплуатационных ограничений для генерирования и выпускания управляющих сигналов к элементам буровой компоновки. В дополнение к этому, блок управления может использовать входные сигналы от буровой компоновки, чтобы определить, когда была пересечена граница в разных отложениях пластов модели земных недр 300, и может выбрать эксплуатационное ограничение или набор эксплуатационных ограничений, связанных с различными отложениями пластов. Блок управления также может использовать входные сигналы для проверки корректности модели земных недр 300 и обновления модели земных недр 300 и эксплуатационных ограничений, если модель земных недр 300 ошибочна.
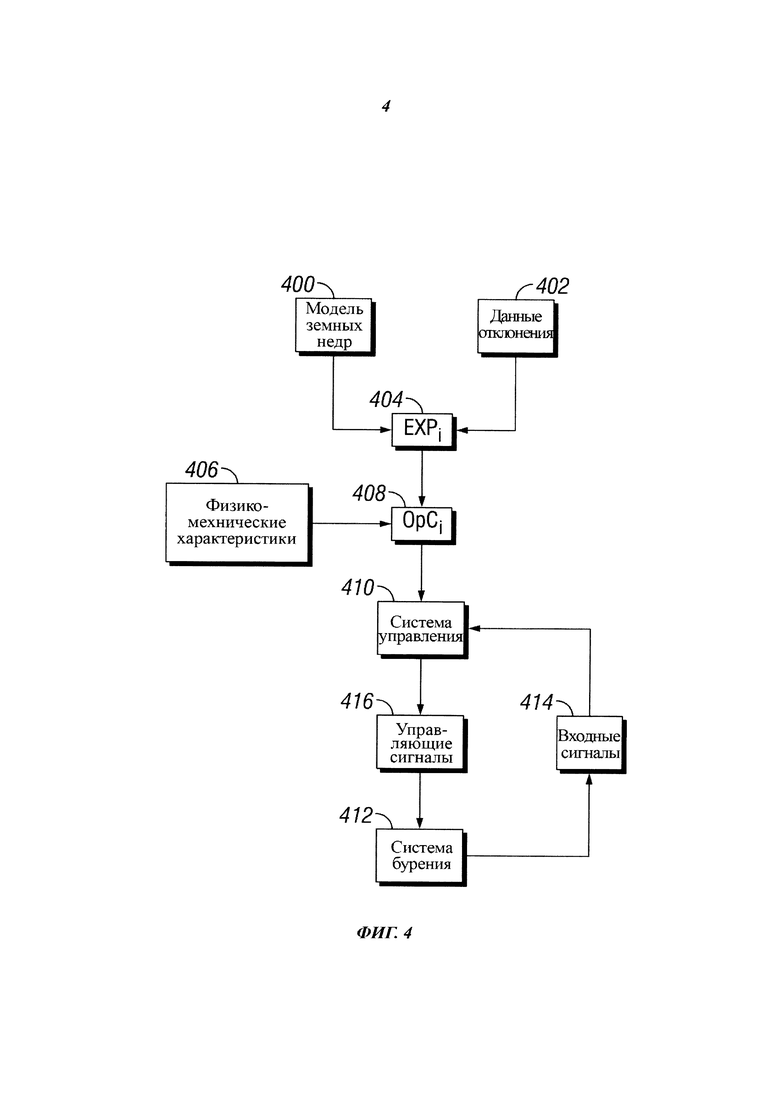
На фиг. 4 представлена схема, иллюстрирующая типовой процесс генерирования эксплуатационных ограничений и выходных управляющих сигналов, основанных по меньшей мере частично на эксплуатационных ограничениях, в соответствии с аспектами настоящего изобретения. Процесс может быть осуществлен в системе обработки данных или блоке управления, как описано выше. В проиллюстрированном варианте реализации изобретения, модель земных недр 400 и набор данных отклонения 402 могут быть получены процессором, который может генерировать набор прогнозных измеренных значений 404, основанных по меньшей мере частично на модели земных недр 400 и данных отклонения 402. Набор прогнозных измеренных значений 404 может содержать выборки, связанные с различными отложениями пластов, определенными в модели земных недр 400. В проиллюстрированном варианте реализации изобретения, набор прогнозных измеренных значений 404 обозначен как EXPi, где i соответствует одному отложению пласта из отложений пластов в модели земных недр 400. Набор прогнозных параметров бурения 404 может содержать параметры бурения и/или измерений промысловых геофизических исследований, которые прогнозируются в системе конкретного отложения пластов на основании типа отложения пластов из модели земных недр 400 и параметров бурения и/или значений измерений при промысловых геофизических исследованиях, выявленных в подобном отложении пластов из данных отклонения 402.
В некоторых вариантах реализации изобретения, процессор может принимать набор прогнозных измеренных значений 404 и по меньшей мере один физический, механический, или эксплуатационный предел 406 буровой компоновки, и может генерировать набор эксплуатационных ограничений 408, основанных по меньшей мере частично на наборе значений прогнозных параметров бурения 404 и по меньшей мере одном физическом, механическом или эксплуатационном пределе 406 буровой компоновки. По меньшей мере одна физическая, механическая, или эксплуатационная характеристика 406 буровой компоновки может содержать интервал значений, вне которого буровая компоновка или элемент буровой компоновки не будет функционировать должным образом. Эти интервалы значений могут основываться на механических предельных значениях буровой компоновки, например, прочности скважинной опорной поверхности, временном сопротивлении при растяжении внутрискважинных инструментов, и т.д. Интервалы значений также могут основываться на взаимодействии между различными элементами буровой компоновки. Например, как будет описано ниже, определенный блок управления может быть способен только поддерживать направление бурения буровой компоновки, когда определенный крутящий момент и параметры вращения оказываются в соответствии относительно двигателя, входящего в комплект блока управления.
Набор эксплуатационных ограничений 408 может быть образован или вычислен процессором и может отражать диапазон параметров бурения или диапазон значений, относящихся к параметрам бурения буровой компоновки, которые будут гарантировать, что буровая компоновка функционирует надлежащим образом и/или функционирует оптимальным образом. Также, как и набор прогнозных значений параметров бурения 404, набор эксплуатационных ограничений 408 может содержать выборки, связанные с различными отложениями пластов, определенными в модели земных недр 400, эксплуатационные ограничения 408 на фиг. 4 обозначены как OpCi , где i соответствует одному отложению пласта из отложений пластов в модели земных недр 400. В некоторых вариантах реализации изобретения, эксплуатационные ограничения 408 могут быть многомерными по отношению к параметрам бурения буровой компоновки. В частности, эксплуатационные ограничения 408 могут содержать двух- и более мерные рабочие параметры, которые ограничивают комбинации двух и более параметров бурения.
В некоторых вариантах реализации изобретения, набор эксплуатационных ограничений 408 может использоваться системой управления или алгоритмом 410 для управления системой бурения 412. В частности, система управления 410 может принимать входные сигналы 414 от элементов системы бурения 412 и может выборочно выпускать управляющие сигналы 416 для системы бурения 412, основанные по меньшей мере частично на сравнении между входными сигналами 414 и набором эксплуатационных ограничений 408. В некоторых вариантах реализации изобретения, система управления 410 может автоматически генерировать управляющие сигналы 416 для системы бурения 412 без вмешательства оператора. В дополнение к этому, в некоторых вариантах реализации изобретения, система управления 410 может использовать входные сигналы 414, чтобы обновить модель земных недр 400 для формирования или для отслеживания условий работы буровой установки.
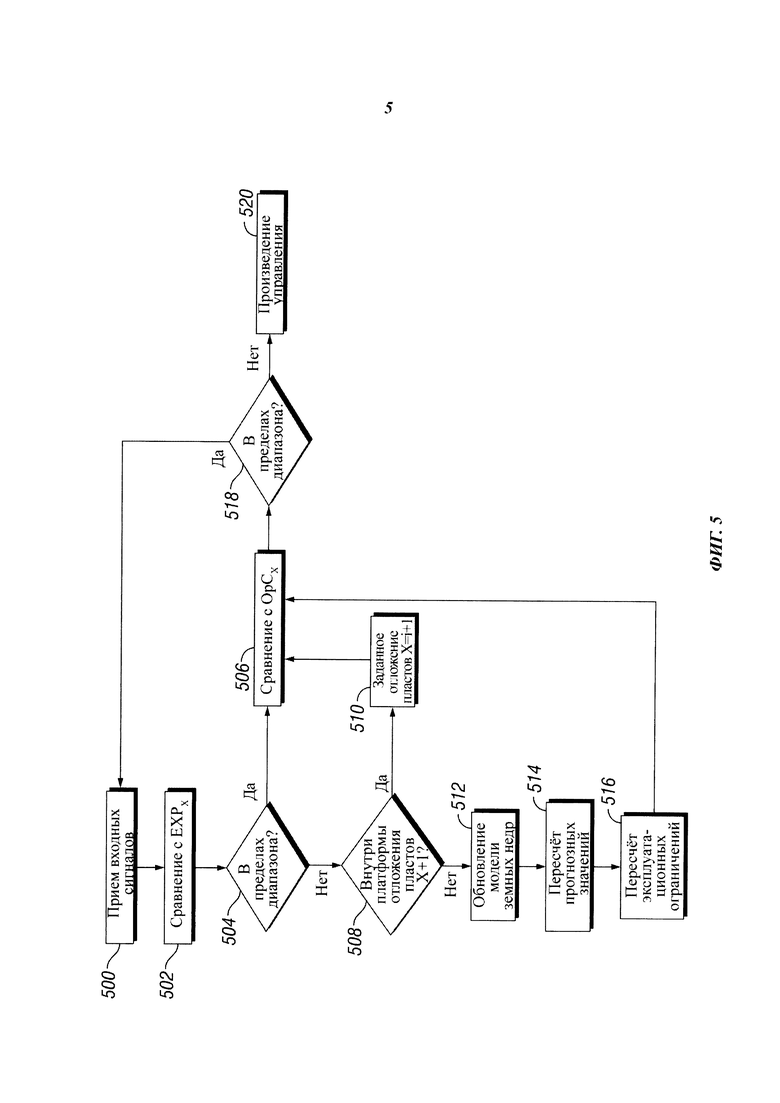
Фиг. 5 иллюстрирует схему типовой системы управления процессом, в соответствии с аспектами настоящего изобретения. В целях иллюстрации, нижеприведенный процесс может содержать текущую переменную пласта x, которая может быть установлена до значений, соответствующих одному или более отложениям пластов i, i+1, i+2, и т.д. Текущая переменная пласта x может быть изначально установлена до i , при этом i соответствует самому близкому к поверхности отложению пластов. Этап 500 может содержать приём входных сигналов по меньшей мере от одного элемента системы бурения. Как было описано выше, входные сигналы могут содержать значение измерения или регистрируемую информацию от КНБК, которая может содержать прямые или косвенные значения измерений параметров бурения буровой компоновки. На этапе 502 входные сигналы могут быть сопоставлены непосредственно с набором прогнозных измеренных значений, связанных с фактическим отложением пластов x, EXPx, или входные сигналы могут быть сопоставлены с EXPx после чего входные сигналы подвергаются обработке.
На этапе 504 определяют, находятся ли входные сигналы в пределах диапазона набора прогнозных значений измерений EXPx. Если входные сигналы находятся в диапазоне набора прогнозных значений измерений EXPx, входные сигналы могут быть сопоставлены с набором эксплуатационных ограничений, связанных с фактическим отложением пластов x, OpCx, на этапе 506. Если входные сигналы находятся вне диапазона набора прогнозных значений измерений EXPx, это может свидетельствовать о том, что модель земных недр, используемая для определения набора прогнозных значений измерений EXPx ошибочна, или глубина буровой компоновки точно не известна по отношению к модели земных недр, и процесс может перейти к этапу 508. Этап 508 может содержать определение, находятся ли входные сигналы в диапазоне набора прогнозных измеренных значений, связанных со следующим отложением пластов i+1. Это может произойти, например, когда граничная поверхность следующего отложения пластов i+1 достигнута, и один или более параметров бурения или внутрискважинные замеры отражают условия внутри следующего отложения пластов x+1. Если входные сигналы находятся в диапазоне набора прогнозных измеренных значений, связанных со следующим отложением пластов x+1, переменная фактического отложения пластов x может быть задана до i+1 на этапе 510 с тем, чтобы мог быть выбран правильный набор эксплуатационных ограничений для сопоставления на этапе 506. Если входные сигналы находятся вне диапазона прогнозных параметров бурения для отложения пластов i+1, модель земных недр может быть обновлена на этапе 512 и набор прогнозных измеренных значений и эксплуатационные ограничения для отложения пластов i могут быть заново вычислены на этапах 514 и 516, соответственно.
Этап 518 может содержать определение, находятся ли входные сигналы в пределах диапазона набора эксплуатационных ограничений, связанных с фактическим отложением пластов x, OpCx. Если входные сигналы находятся в пределах диапазона, тогда буровая компоновка может эксплуатироваться в пределах набора эксплуатационных ограничений OpCx, и процесс может вернуться к этапу 500, когда принимаются новые входные сигналы. Если входные сигналы находятся вне диапазона, автоматическое регулирующее устройство или процессор может генерировать один или более управляющих сигналов на этапе 520. Как описано выше, управляющие сигналы могут вызывать изменения параметра бурения системы одним или более элементами буровой компоновки таким образом, что буровая компоновка работает в пределах эксплуатационных ограничений.
В других вариантах реализации изобретения, процессор или система управления дополнительно может отслеживать изменения одного или более параметров бурения в динамике по времени с использованием входных сигналов. Об изменениях в параметрах бурения внутри одного отложения пластов может свидетельствовать, например, механическое состояние инструмента. В одном варианте реализации изобретения, система управления может принимать входные сигналы от системы бурения и определять ТОВ каждый раз, когда приняты входные сигналы. Если ТОВ со временем изменяется с поддающимся идентификации перепадом, или резко изменяется при отсутствии граничной поверхности пласта, это может указывать на то, что возникло механическое повреждение в одном или более элементах буровой компоновки, буровые работы могут остановиться для выполнения работ по техническому обслуживанию.
Система управления и процесс, описанные выше, могут использоваться с различными элементами и системами буровой компоновки. В одном варианте реализации изобретения система управления, описанная выше, может использоваться с блоком управления, аналогичным описанному выше со ссылкой на фиг. 1, чтобы гарантировать, что блок управления с высокой степенью точности поддерживает выбранное направление бурения. Некоторые блоки управления используют внутрискважинные источники энергии (например, электродвигатели, поток жидкости, и т.п.), чтобы поддерживать направление бурения бурового долота в то время, как буровое долото контактирует с пластом. Действительная мощность источника энергии может накладывать ограничения на блок управления в отношении параметров бурения, которые могут быть приспособлены и отрегулированы для поддержания направления бурения. Например, в области применения с роторно-управляемым направлением долота, блок управления может использовать силы вращения в противоположных направлениях для противодействия крутящему моменту и вращению, прилагаемым к буровому долоту бурильной колонной в целях поддержания желаемой угловой ориентации бурового долота относительно пласта. Если крутящий момент и скорость вращения остались в пределах фиксированного диапазона, определенного эксплуатационными ограничениями для блока управления, блок управления может иметь достаточную мощность, чтобы компенсировать крутящий момент и вращение для поддержания направления бурения. Если крутящий момент и скорость вращения превосходят пределы данного диапазона, блок управления может не иметь достаточной мощности, чтобы компенсировать силы крутящего момента, и направление бурения может измениться.
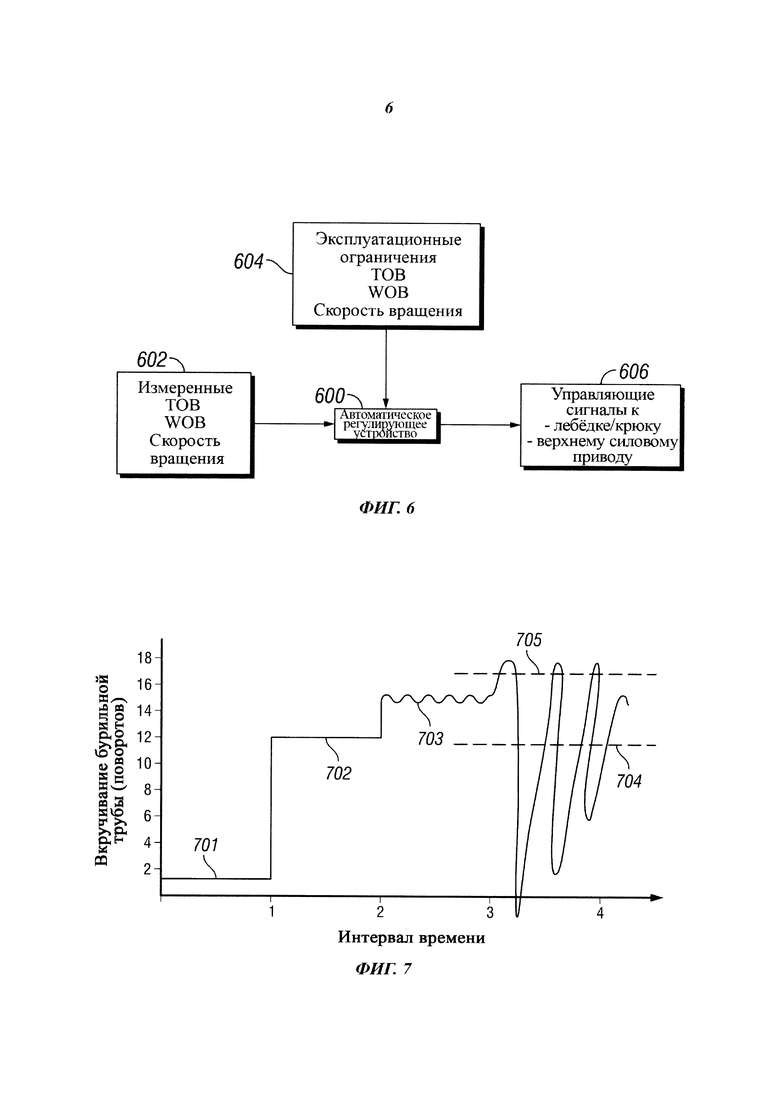
На фиг. 6 проиллюстрирована типовая схема системы управления для блока управления, в соответствии с аспектами настоящего изобретения. Как было описано выше, система может содержать автоматическое регулирующее устройство или блок управления 600, который принимает входные сигналы, соответствующие параметрам бурения. В проиллюстрированном варианте реализации изобретения, входные сигналы 602 содержат прямые измерения для ТОВ, WOB, и скорости вращения от одного или более датчиков, установленных на или вблизи блока управления. Значения измерений ТОВ, WOB, и скорости вращения могут передаваться автоматическому регулирующему устройству 600, которое может быть размещено, например, на поверхности или в скважине внутри КНБК. Автоматическое регулирующее устройство 600 также может принимать эксплуатационные ограничения для параметров бурения ТОВ, WOB, и скорости вращения, которые могут быть рассчитаны по меньшей мере частично на основании эксплуатационных качеств блока управления. Если один или более из измеренных параметров: ТОВ, WOB, и скорость вращения превосходят пределы эксплуатационного ограничения 604, автоматическое регулирующее устройство 600 может генерировать управляющие сигналы 606 к одному или более элементам системы бурения, чтобы заставить элемент изменить один из параметров бурения. Например, автоматическое регулирующее устройство 600 может генерировать управляющий сигнал к лебёдке/крюку в сборе на поверхности, чтобы уменьшить WOB внутри скважины, и/или управляющий сигнал к верхнему силовому приводу, чтобы изменить крутящий момент и скорость вращения, приложенные к бурильной колонне. Как будет описано ниже, автоматическое регулирующее устройство 600 также может приводить в действие внутрискважинный механизм для регулирования ТОВ или WOB.
Во многих случаях, бурильная колонна, к которой присоединен блок управления, может быть тысячи футов в длину, и крутящий момент, приложенный к бурильной колонне на поверхности, может привести к намотке бурильной колонны. В зависимости от количества поворотов в бурильной колонне, буровая компоновка может столкнуться с работой "неравномерного вращения (бурильной колонны)", когда блок управления и буровое долото временно останавливают вращение - "заклинивают", прежде чем резко начать снова - "проскользнуть". Это резкое начало может вызвать состояние крутящего момента на буровом долоте, которое может превосходить пределы блока управления.
В некоторых вариантах реализации изобретения, для учета условий неравномерного вращения входные сигналы 602 могут содержать значения измерений, из которых может быть вычислено количество поворотов в колонне бурильных труб, а эксплуатационные ограничения 604 могут содержать пределы на приемлемое количество поворотов, чтобы избежать условий неравномерного вращения. В частности, входные сигналы 602 могут содержать значения измерений угла торца долота по меньшей мере от одного датчика торца долота, прикрепленного внутри скважины на или вблизи КНБК и на поверхности, и по меньшей мере одного датчика торца долота, прикрепленного к участку бурильной колонны на или вблизи поверхности. При сопоставлении угла торца долота блока управления с углом торца долота бурильной колонны на поверхности, автоматическим регулирующим устройством 600 может быть рассчитано количество поворотов в бурильной колонне. В дальнейшем автоматическое регулирующее устройство 600 может сопоставлять рассчитанное количество поворотов с эксплуатационным ограничением и, если количество поворотов находится вне эксплуатационного ограничения, автоматическое регулирующее устройство 600 может генерировать один или более управляющих сигналов для изменения параметров бурения, которые будут влиять на количество поворотов. Например, автоматическое регулирующее устройство 600 может выпускать управляющий сигнал для изменения WOB, ТОВ, и/или скорости вращения, каждый из которых может изменять количество поворотов в бурильной колонне.
На фиг. 7 представлена диаграмма, иллюстрирующая типовое эксплуатационное ограничение, относящееся к поворотам в колонне бурильных труб, в соответствии с аспектами настоящего изобретения. Диаграмма 700 иллюстрирует график ряда точек, определяющих кривую по количеству поворотов бурильной колонны на оси x и по времени на оси y, а также вероятное количество поворотов при различных условиях эксплуатации. Область 701 диаграммы 700 отображает условия эксплуатации, при которых бурильная колонна не вращается, в таком случае количество поворотов в бурильной колонне может быть равно или приближено к нулю. Область 702 отображает ситуацию, кода бурильная колонна вращается, однако буровое долото не контактирует с пластом. Область 703 отображает ситуацию, когда бурильная колонна вращается и буровое долото контактирует с пластом, но количество поворотов осталось в пределах эксплуатационных ограничений 704. Несмотря на то, что количество поворотов может колебаться в области 703, результирующие состояния крутящего момента на буровом долоте и блок управления в целом могут оставаться постоянными в эксплуатационных пределах блока управления. В противоположность этому, область 705 отображает этап, когда количество поворотов находится вне эксплуатационных ограничений 705, приводя к условиям неравномерного вращения, при которых количество поворотов и условия крутящего момента на блоке управлении и буровом долоте резко изменяются и превосходят пределы блока управления.
В дополнение к использованию системы управления для поддержания элемента буровой компоновки в эксплуатационных пределах, система управления также может быть использована для оптимизации аспектов системы бурения. Например, система управления может использоваться по отношению к буровому долоту и КНБК для оптимизации скорости проникновения буровой компоновки и для защиты внутрискважинных элементов. В ходе того, как буровая компоновка проходит бурением пласт, силы осевого и крутящего момента, приложенные к буровому долоту, могут привести к перемещению бурового долота вокруг ствола скважины по вихревому типу, соприкосновению с пластом в различных местах на конце ствола скважины в течение некоторого времени. Данное биение бурового долота уменьшает скорость проникновения буровой компоновки из-за непостоянной точки касания с пластом. Биение бурового долота также может вызвать поперечное колебание внутри КНБК выше бурового долота, которое может привести к повреждению чувствительных механических и электрических элементов.
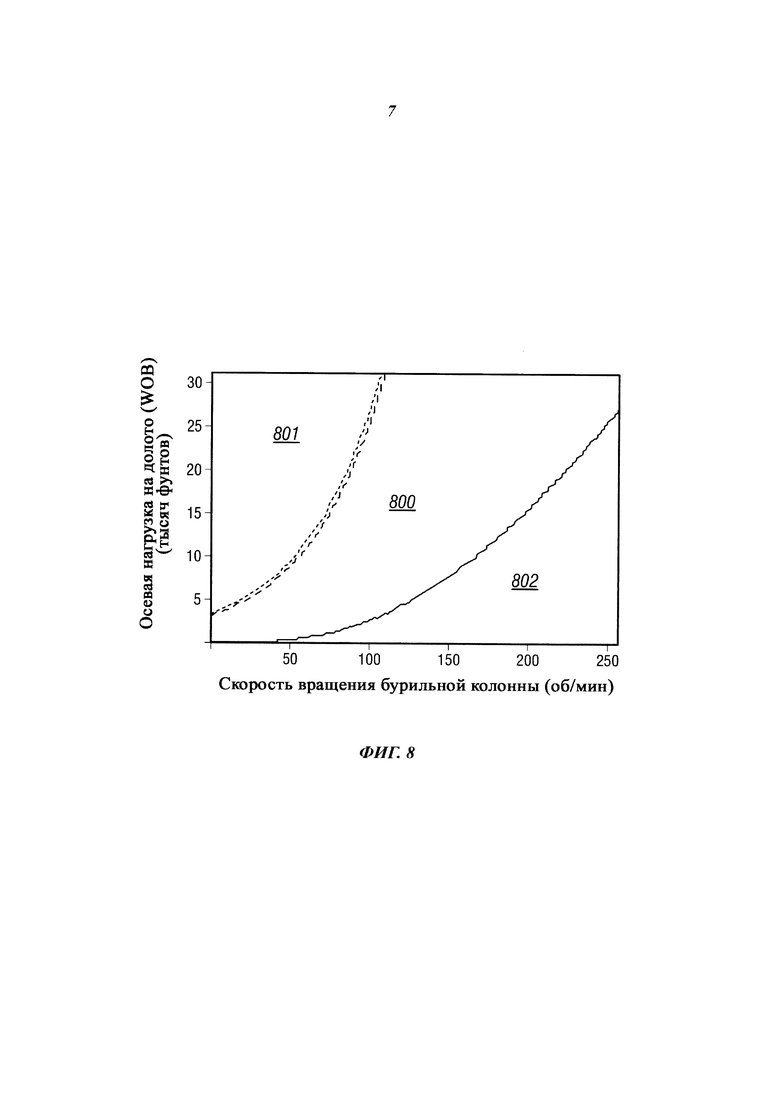
В соответствии с аспектами настоящего изобретения, эксплуатационные ограничения для одного или более параметров бурения могут быть выбраны для уменьшения биения бурового долота в скважине, и система управления подобно управляющим системам, описанным выше, может выпускать управляющие сигналы, чтобы гарантировать, что буровая компоновка остается в пределах эксплуатационных ограничений. По отношению к биению бурового долота в скважине, эксплуатационные ограничения могут содержать двухмерные эксплуатационные ограничения по показателям WOB и скорости вращения, которые определяют комбинации значений WOB и скоростей вращения, при которых биение бурового долота и поперечное колебание снижены до минимального уровня. На фиг. 8 представлена диаграмма, иллюстрирующая устойчивую рабочую область 800 между двумя неустойчивыми областями 801 и 802, построенная по ряду точек, определяющих кривую, по показателям WOB на оси x и скорости вращения бурильной колонны, в оборотах в минуту (об/мин), на оси y. То есть, не все буровые долота, условия в стволе скважины, и типы пластов будут иметь такие же устойчивые и неустойчивые области, или такую отчетливо устойчивую рабочую зону, однако подобные эксплуатационные ограничения могут быть рассчитаны с использованием известных буровых долот, условий в стволе скважины, и типов пластов для данных буровых работ. Когда конкретная комбинация измеренных параметров бурения WOB и скорости вращения бурильной колонны находится вне устойчивой области 800, автоматическое регулирующее устройство может выпускать управляющие сигналы для изменения одного или обоих из указанных параметров бурения: WOB и скорости вращения бурильной колонны, пока система не вернется к стабильной области 800.
Несмотря на то, что выше описаны системы по отношению к элементам системы бурения (таким как, крюк в сборе, насос, верхний силовой привод, и т.п.), размещенным на поверхности, и модификация или изменение параметров бурения посредством выпускания управляющих сигналов к поверхностным элементам системы бурения, система управления также может быть внедрена в систему с замкнутым контуром внутри скважины, в которой внутрискважинные элементы принимают управляющие сигналы от внутрискважинного автоматического регулирующего устройства и изменяют параметры бурения в ответ на управляющие сигналы. Системы управления также могут разделяться между поверхностными и внутрискважинными элементами, когда некоторые параметры бурения регулируются на поверхности, а некоторые – внутри скважины. В других вариантах реализации изобретения, определённые параметры бурения могут регулироваться как на поверхности, так и внутри скважины.
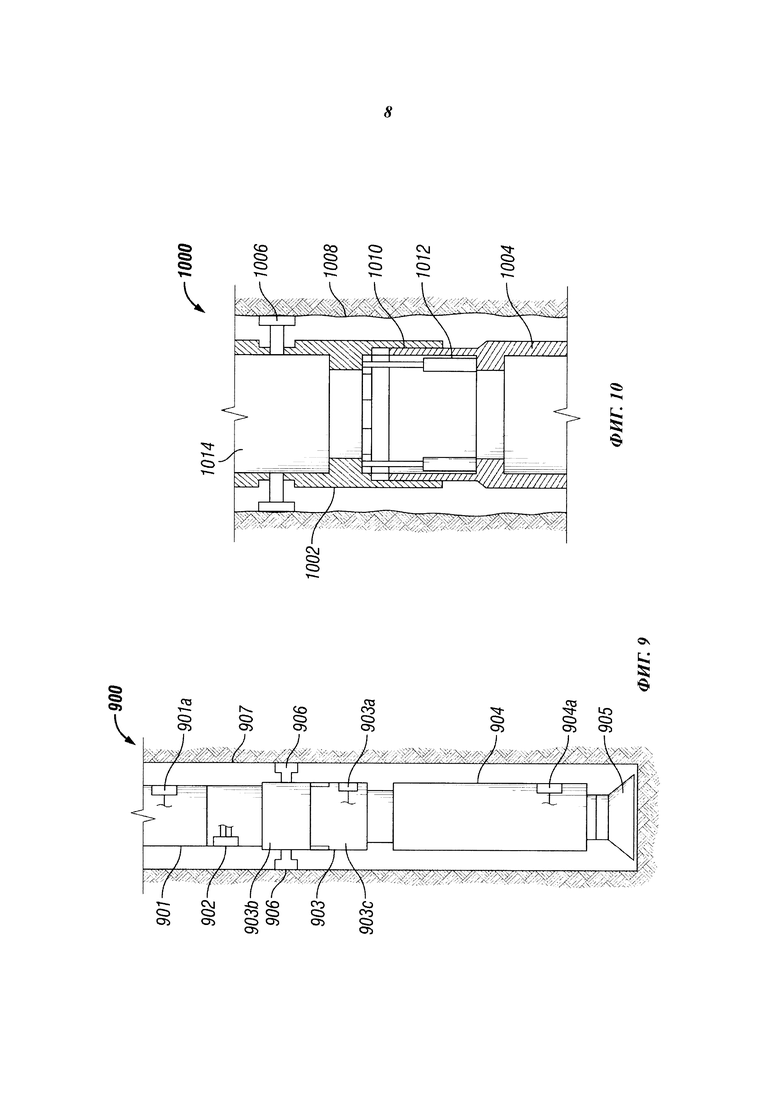
На фиг. 9 проиллюстрировано типовая КНБК, способная изменить один или более параметров бурения, в соответствии с аспектами настоящего изобретения. В проиллюстрированном варианте реализации изобретения КНБК 900 содержит зону КВБ/ИВБ 901, автоматическое регулирующее устройство 902, блок управления тягой 903, забойный двигатель 904, и буровое долото 905. Автоматическое регулирующее устройство 902 может быть коммуникационно присоединено к автоматическим регулирующим устройствам и/или измеряющим устройствам 901a, 903a, и 904a зоны КВБ/ИВБ 901, блоку управления тягой (TCU) 903, и забойному двигателю 904, в указанном порядке. Некоторые из всех автоматических регулирующих устройств и/или измеряющих устройств 901a, 903a, и 904a могут транслировать как входные сигналы измеренные параметры бурения к автоматическому регулирующему устройству 902. Например, автоматическое регулирующее устройство и/или измеряющее устройство 901a зоны КВБ/ИВБ 901 может измерять угол торца долота КНБК 900, автоматическое регулирующее устройство и/или измеряющее устройство 903a TCU 903 может измерять WOB, а автоматическое регулирующее устройство и/или измеряющее устройство 904a забойного двигателя 904 может измерять ТОВ и скорость вращения бурового долота 904. Автоматическое регулирующее устройство 902 может функционировать подобно описанной выше системе управления, и может сопоставлять принятые входные сигналы с одним или более эксплуатационными ограничениями для буровой компоновки. Эксплуатационные ограничения могут храниться внутри скважины в отдельном информационном носителе автоматического регулирующего устройства 902 или в запоминающем устройстве, объединенном с автоматическим регулирующим устройством 902. Таким образом, автоматическое регулирующее устройство 902 может генерировать управляющие сигналы для одного или более автоматических регулирующих устройств и/или измеряющих устройств 901a, 903a, и 904a зоны КВБ/ИВБ 901, TCU 903, и забойного двигателя 904, для изменения одного или более параметров бурения.
В проиллюстрированном варианте реализации изобретения, забойный двигатель 904 отвечает за приведение в движение бурового долота 905, и по этой причине может управлять крутящим моментом, приложенным к буровому долоту 904, и скоростью вращения бурового долота 904. Забойный двигатель 904 может содержать, например, электродвигатель, гидравлический забойный двигатель, или объёмный забойный двигатель. В том случае, когда забойным двигателем 904 является электродвигатель, крутящий момент и скорость вращения бурового долота 905 можно изменять посредством регулирования уровня или мощности приведения в движение двигателя 904. В том случае, когда забойным двигателем 904 является гидравлический забойный двигатель или объёмный забойный двигатель, крутящий момент и скорость вращения, приложенные к буровому долоту 905, в некоторой степени могут зависеть от скорости потока бурового раствора через забойный двигатель 904. Следовательно, крутящий момент и скорость вращения прикладываются к буровому долоту посредством включения в состав одного или более перепускных клапанов, которые могут отклонять часть бурового раствора в кольцевое пространство, окружающее забойный двигатель 904, или через забойный двигатель 904, не способствуя вращению бурового долота 905. В тех случаях, автоматическое регулирующее устройство и/или измеряющее устройство 904a может передавать сигналы к одной или более электрическим составляющим (например, перепускным клапанам или электродвигателям) забойного двигателя 904 для изменения ТОВ и скорости вращения бурового долота 905.
В некоторых вариантах реализации изобретения, блок управления тягой 903 может применяться для изменения WOB. В проиллюстрированном варианте реализации изобретения, TCU 903 содержит выдвижные консоли 906, которые контактируют со стенкой ствола скважины 907. Выдвижные консоли 906 могут приводиться в действие посредством системы чистой сырой нефти и насоса (не показан) внутри TCU 903, или могут приводиться в действие посредством бурового раствора, протекающего через КНБК 900. Указанный TCU 903 может содержать зону крепления 903b, из которой выступают прикрепленные к ней выдвижные консоли 906, и зону тяги 903c, к которой зона крепления может сообщать осевое усилие. Как и выдвижные консоли 906, осевое усилие может обеспечиваться системой чистой сырой нефти и насосом, размещенным в TCU 903.
Зона тяги 903c может быть присоединена к забойному двигателю 904, и осевое усилие, сообщаемое зоне тяги 903c зоной крепления, может передаваться забойному двигателю 904 и буровому долоту 905. Следовательно, WOB может изменяться с переменой осевого усилия, сообщаемого зоне тяги 903c. В ходе бурения выдвижные консоли 906 могут быть полностью или частично втянуты, разъединяясь со стенкой ствола скважины 907, при этом консоли 906 имеют возможность выдвинуться и вернуться в исходное положение в более низком положении на стволе скважины 906, для поддержания постоянной WOB. Как и забойный двигатель 904, автоматическое регулирующее устройство и/или измеряющее устройство 903a TCU 903 может передавать сигналы к одному или более составляющим (например, насосам и клапанам) TCU 903 для изменения WOB при побуждении управляющим сигналом от автоматического регулирующего устройства 902.
В альтернативном варианте реализации изобретения, зона тяги 903 может содержать выдвижные консоли с одним или более звеньями каждая, которые ухватывают стенку ствола скважины 907. Звенья могут содержать танкоподобные звенья с непрерывно вращающимися гусеницами. Вместо того, чтобы использовать выдвижные консоли, которые крепятся к стенке ствола скважины 907 и разделяют зоны крепления тяги 903b и 903c, звенья могут прикладывать постоянное осевое усилие книзу на буровое долото 905 без необходимости втягиваться и возвращаться в исходное положение. Другие варианты реализации изобретения будут понятны специалисту в данной отрасли при ознакомлении с настоящим описанием. Например, WOB также могла бы изменяться через управление поршнем, прикрепленным к бурильной колонне, такой как в системе Reelwell™, которая взаимодействует с колонной труб, не доходящей до устья скважины или обсадной колонной, чтобы создать усилие бокового давления поршня на бурильную колонну через поверхности гидравлики.
Чтобы поспособствовать TCU 903, данные в режиме реального времени или записанные при предыдущих измерениях в приведенной скважине или в соседних скважинах могут применяться для определения механических свойств пласта, таких как предел прочности при сжатии и эпюру напряжений стенки ствола скважины 907. Модель земных недр, сохраненная в системе, может быть обновлена на основании локальных измерений у или вблизи TCU 903, чтобы уточнить существующую модель и тем самым улучшить прогнозирование особенностей пласта. Например, если расстояние протягивания выдвижных консолей 906 измеряется с помощью системы для данного усилия, может быть определен коэффициент жесткости пласта, а отсюда и прочность на сжатие. Если общий градиент прочности на сжатие увеличивается или уменьшается в области ствола скважины 907 со скоростью отличающейся от таковой, связанной с данными отклонения из соседней скважины, обновление модели земных недр будет способствовать уточнению оптимального груза, требуемого для данного долота и текущей заостренности бурового долота, чтобы определить, какие должны быть ограничения по WOB для бурения.
Фиг. 10 иллюстрирует схему типового TCU 1000, в соответствии с аспектами настоящего изобретения. Как можно видеть, TCU 1000 содержит участок крепления 1002 и участок тяги 1004. Одна или более выдвижных консолей 1006 могут быть присоединены к участку крепления 1002, и могут контактировать со стенкой ствола скважины 1008. В проиллюстрированном варианте реализации изобретения, участок тяги 1004 присоединен к участку крепления 1002 при помощи шлицей 1010 и плашек 1012. Шлиц 1010 может держать участок тяги 1004 соосно внутри участка крепления 1002, а плашки 1012 могут применяться для сообщения осевого усилия книзу на участок тяги 1004. В частности, плашки 1012 могут быть двухсторонними с большой длиной хода и скорым откликом для точного управления WOB. В некоторых вариантах реализации изобретения, бурильная колонна может вращаться внутри ствола 1014 TCU 1000, продолжая использование TCU 1000, когда буровое долото вращается от поверхности через верхний силовой привод.
На фиг. 11 проиллюстрирован типовой забойный двигатель 1100, в соответствии с аспектами настоящего изобретения. Двигатель 1100 может содержать наружный корпус объёмного забойного двигателя 1102, который может быть присоединен к другим элементам КНБК. В некоторых вариантах реализации изобретения, двигатель 1100 может содержать ротор 1104 и статор 1106, при этом ротор присоединен к буровому долоту и приводит в движение буровое долото в ответ на поток бурового раствора через двигатель 1100. В проиллюстрированном варианте реализации изобретения, двигатель содержит перепускной клапан 1108, который может открываться для отклонения бурового раствора от ротора 1104, за пределы двигателя 1100. В альтернативном варианте реализации изобретения, клапан может отклонять раствор через ротор 1104 таким образом, что он не попадает на границу раздела между ротором 1104 и статором 1106.
Поток бурового раствора между ротором 1104 и статором 1106 может создавать разность давлений, что создает осевое усилие книзу на ротор 1104, которое может быть передано от ротора 1104 к валу распределительного клапана (CV) 1110 и от вала секции подшипника 1112 к буровому долоту (не показано). Вместо того, чтобы передавать это осевое усилие к корпусу 1102, как это характерно для забойных двигателей, секция подшипника может позволить ротору 1104 перемещаться относительно статора 1106 и прилагать осевое усилие к буровому долоту. Следовательно, ТОВ, WOB, и скорость вращения бурового долота могут изменяться посредством управления перепускным клапаном 1108.
В соответствии с аспектами настоящего изобретения, типовой способ управления буровой компоновкой может включать получение данных измерений по меньшей мере от одного датчика, присоединенного к элементу буровой компоновки, расположенному в пласте. Эксплуатационное ограничение по меньшей мере для участка буровой компоновки может быть определено по меньшей мере частично на основании модели пласта и набора данных отклонения. Управляющий сигнал может быть сгенерирован для изменения одного или более параметров бурения буровой компоновки, основанных по меньшей мере частично на данных измерений и эксплуатационном ограничении. Управляющий сигнал может передаваться к регулируемому элементу буровой компоновки.
В некоторых вариантах реализации изобретения генерирование управляющего сигнала для изменения одного или более параметров бурения включает генерирование управляющего сигнала для изменения одного или более из указанных: параметра осевой нагрузки на долото (WOB), параметра момента вращения долота (TOB), скорости вращения бурового долота, скорости потока бурового раствора, и угла торца долота элемента буровой компоновки. Получение данных измерений по меньшей мере от одного датчика может включать получение блоком управления первого значения измерений угла торца долота; определение эксплуатационного ограничения по меньшей мере для участка буровой компоновки может включать определение верхнего и нижнего пределов на количество поворотов в колонне бурильных труб буровой компоновки; и генерирование управляющего сигнала для изменения одного или более параметров бурения буровой компоновки может включать определение текущего значения количества поворотов на основании первого угла торца долота и второго угла торца долота участка бурильной колонны вблизи поверхности и генерирование управляющего сигнала для изменения одного или более из указанных: ТОВ, WOB, и скорости вращения бурового долота, если текущее значение количества поворотов находится вне верхнего и нижнего пределов.
В некоторых вариантах реализации изобретения, получение данных измерений по меньшей мере от одного датчика может включать получение значения измерений WOB и значения измерений ТОВ; определение эксплуатационного ограничения по меньшей мере для участка буровой компоновки может включать определение комбинаций параметров бурения WOB и ТОВ для буровой компоновки, которые снижают до минимального уровня биение бурового долота; и генерирование управляющего сигнала для изменения одного или более параметров бурения буровой компоновки может включать генерирование управляющего сигнала для изменения одного или более из указанных параметров бурения: ТОВ и WOB таким образом, что измененные параметры бурения ТОВ и WOB содержат одну из комбинаций параметров бурения WOB и ТОВ, которая минимизирует биение бурового долота. В любом из вариантов реализации изобретения, описанных выше, передача управляющего сигнала к регулируемому элементу буровой компоновки может включать передачу управляющего сигнала по меньшей мере к одному из указанных: регулируемому элементу буровой компоновки, расположенному на поверхности пласта, и регулируемому элементу буровой компоновки, расположенному в пласте.
В некоторых вариантах реализации изобретения, регулируемый элемент буровой компоновки, расположенный на поверхности, может содержать по меньшей мере один из указанных: крюк в сборе, насос, и верхний силовой привод. В некоторых вариантах реализации изобретения, регулируемый элемент буровой компоновки, расположенный в пласте, может содержать по меньшей мере один из указанных: забойный двигатель и блок управления тягой. В тех вариантах реализации изобретения, забойный двигатель может содержать объёмный забойный двигатель, а блок управления тягой может содержать по меньшей мере одну выдвижную консоль для закрепления блока управления тягой на пласте.
В любом из вариантов реализации изобретения, описанных выше, типовой способ может дополнительно включать обновление модели с использованием полученных данных измерений, если полученные данные измерений находятся вне набора прогнозных данных измерений, образованных из модели и набора данных отклонения, и определение новых эксплуатационных ограничений, основанных по меньшей мере частично на обновленной модели. Подобным образом, в любом из вариантов реализации изобретения, описанных выше, типовой способ может дополнительно включать определение по меньшей мере одного параметра бурения буровой компоновки на основании полученных данных измерений, и выявление неисправности в одном или более элементах буровой компоновки, основанное по меньшей мере частично на определенном параметре бурения.
В соответствии с аспектами настоящего изобретения, типовая система управления буровой компоновкой может содержать датчик внутри ствола скважины в пласте, регулируемый элемент, и процессор, коммуникационно присоединенный к датчику и регулируемому элементу. Процессор может быть присоединен к запоминающему устройству, содержащему набор команд, выполнение процессором которых побуждает процессор принимать данные измерений от датчика; определять эксплуатационное ограничение для буровой компоновки, основанное по меньшей мере частично на модели пласта и набора данных отклонения; генерировать управляющий сигнал для изменения одного или более параметров бурения буровой компоновки по меньшей мере частично на основании данных измерений и эксплуатационного ограничения; и передавать управляющий сигнал к регулируемому элементу.
В некоторых вариантах реализации изобретения, один или более параметров бурения могут содержать по меньшей мере один из указанных: параметр осевой нагрузки на долото (WOB), параметр момента вращения долота (ТОВ), скорость вращения бурового долота, скорость потока бурового раствора, и угол торца долота элемента буровой компоновки. В любом из вариантов реализации изобретения, описанных выше, процессор и регулируемый элемент могут находиться по меньшей мере частично внутри ствола скважины, и регулируемый элемент может содержать по меньшей мере один из указанных: забойный двигатель и блок управления тягой. В некоторых вариантах реализации изобретения, забойный двигатель может содержать объёмный забойный двигатель, а блок управления тягой может содержать по меньшей мере одну выдвижную консоль для закрепления блока управления тягой на пласте.
В некоторых из вышеизложенных вариантов реализации изобретения, процессор расположен на поверхности пласта, и регулируемый элемент содержит по меньшей мере один из указанных: крюк в сборе, насос, и верхний силовой привод. Регулируемый элемент может быть расположен на поверхности пласта; процессор может быть расположен на поверхности пласта или внутри ствола скважины; а набор команд, который побуждает процессор передавать управляющий сигнал к регулируемому элементу, также может побуждать процессор передавать первый управляющий сигнал к регулируемому элементу, и передавать второй управляющий сигнал ко второму регулируемому элементу внутри ствола скважины. В некоторых вариантах реализации изобретения, данные измерений могут содержать значение измерений блока управления первого угла торца долота, к которому присоединен датчик; эксплуатационное ограничение может содержать верхний и нижний пределы на количество поворотов в колонне бурильных труб буровой компоновки; и набор команд, который побуждает процессор генерировать управляющий сигнал, также может побуждать процессор определять текущее значение количества поворотов на основании первого угла торца долота и второго угла торца долота участка бурильной колонны вблизи поверхности, и генерировать управляющий сигнал для изменения одного или более из указанных: ТОВ, WOB, и скорости вращения бурового долота, если текущее значение количества поворотов находится вне верхнего и нижнего пределов
В некоторых вариантах реализации изобретения, данные измерений могут содержать значение измерений WOB и значение измерений ТОВ; эксплуатационное ограничение может содержать комбинации параметров бурения WOB и ТОВ для буровой компоновки, которые снижают до минимального уровня биение бурового долота; и набор команд, который побуждает процессор генерировать управляющий сигнал, также может побуждать процессор генерировать управляющий сигнал для изменения одного или более из указанных параметров бурения: ТОВ и WOB таким образом, что измененные параметры бурения ТОВ и WOB содержат одну из комбинаций параметров бурения WOB и ТОВ, которая минимизирует биение бурового долота. В некоторых вариантах реализации изобретения, набор команд дополнительно может вызывать обновление модели процессором с использованием полученных данных измерений, если полученные данные измерений находятся вне набора прогнозных данных измерений, образованных из модели и набора данных отклонения, и определение новых эксплуатационных ограничений, основанных по меньшей мере частично на обновленной модели. Аналогично, в некоторых вариантах реализации изобретения, набор команд дополнительно может вызывать определение по меньшей мере одного параметра бурения буровой компоновки процессором на основании полученных данных измерений; и выявление неисправности в одном или более элементах буровой компоновки, основанное по меньшей мере частично на определенном параметре бурения.
Таким образом, настоящее изобретение хорошо приспособлено для достижения целей и преимуществ, указанных выше, а также свойственных ему. Конкретные варианты реализации изобретения, раскрытые выше, являются лишь иллюстрацией, поскольку настоящее раскрытие может быть модифицировано и осуществлено различными, но эквивалентными способами, очевидными для специалистов в данной отрасли, у которых есть возможность ознакомиться с настоящим описанием. Кроме того, не налагаются ограничения в отношении подробностей разработки или конструкции, приведенных в данном документе, за исключением описанных в приведенной ниже формуле изобретения. Таким образом, очевидно, что конкретные иллюстративные варианты реализации изобретения, раскрытые выше, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности настоящего изобретения. Также термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Применяемая в формуле изобретения форма единственного числа предполагает наличие одного или большего количества рассматриваемых элементов.
Изобретение относится к средствам управления буровой компоновкой. Техническим результатом является исключение неравномерного вращения бурильной колонны при заклинивании или проскальзывании бурового долота. В частности, предложен способ управления буровой компоновкой, содержащий: получение данных измерений по меньшей мере от одного датчика, присоединенного к элементу буровой компоновки, расположенному в пласте; определение эксплуатационного ограничения по меньшей мере для участка буровой компоновки, основанного по меньшей мере частично на модели пласта и наборе данных отклонения, причем это определение включает определение верхнего и нижнего пределов количества скручиваний в колонне бурильных труб буровой компоновки; генерирование управляющего сигнала для изменения одного или более параметров бурения буровой компоновки, основанных по меньшей мере частично на данных измерения и эксплуатационном ограничении; и передачу управляющего сигнала к регулируемому элементу буровой компоновки. 2 н. и 18 з.п. ф-лы, 11 ил.
1. Способ управления буровой компоновкой, содержащий:
получение данных измерений по меньшей мере от одного датчика, присоединенного к элементу буровой компоновки, расположенному в пласте;
определение эксплуатационного ограничения по меньшей мере для участка буровой компоновки, основанного по меньшей мере частично на модели пласта и наборе данных отклонения, причем это определение включает определение верхнего и нижнего пределов количества скручиваний в колонне бурильных труб буровой компоновки;
генерирование управляющего сигнала для изменения одного или более параметров бурения буровой компоновки, основанных по меньшей мере частично на данных измерения и эксплуатационном ограничении; и
передачу управляющего сигнала к регулируемому элементу буровой компоновки.
2. Способ по п. 1, отличающийся тем, что генерирование управляющего сигнала для изменения одного или более параметров бурения включает генерирование управляющего сигнала для изменения одного или более из указанных: параметра осевой нагрузки на долото (WOB), параметра момента вращения долота (ТОВ), скорости вращения бурового долота, скорости потока бурового раствора и угла торца долота указанного элемента буровой компоновки.
3. Способ по п. 2, отличающийся тем, что
получение данных измерений по меньшей мере от одного датчика включает получение первого значения измерения угла торца долота в составе блока управления; и
генерирование управляющего сигнала для изменения одного или более параметров бурения буровой компоновки включает
определение текущего количества поворотов на основании первого угла торца долота и второго угла торца долота участка колонны бурильных труб вблизи поверхности; и
генерирование управляющего сигнала для изменения одного или более из указанных: ТОВ, WOB и скорости вращения бурового долота, если текущее количество поворотов находится вне верхнего и нижнего пределов.
4. Способ по п. 2, отличающийся тем, что
получение данных измерения по меньшей мере от одного датчика включает получение значения измерений WOB и значения измерений ТОВ;
определение эксплуатационного ограничения по меньшей мере для участка буровой компоновки включает определение комбинации параметров бурения WOB и ТОВ для буровой компоновки, которая минимизирует биение бурового долота; и
генерирование управляющего сигнала для изменения одного или более параметров бурения буровой компоновки включает генерирование управляющего сигнала для изменения одного или более из указанных параметров бурения, ТОВ и WOB, таким образом, что измененные параметры бурения ТОВ и WOB содержат одну из комбинаций параметров бурения WOB и ТОВ, которая минимизирует биение бурового долота.
5. Способ по любому из пп. 1-4, отличающийся тем, что передача управляющего сигнала к регулируемому элементу буровой компоновки включает передачу управляющего сигнала по меньшей мере к одному из указанных: регулируемому элементу буровой компоновки, расположенному на поверхности пласта, и регулируемому элементу буровой компоновки, расположенному в пласте.
6. Способ по п. 5, отличающийся тем, что регулируемый элемент буровой компоновки, расположенный на поверхности, содержит по меньшей мере один из указанных: крюк в сборе, насос и верхний силовой привод.
7. Способ по п. 5, отличающийся тем, что регулируемый элемент буровой компоновки, расположенный в пласте, содержит по меньшей мере один из указанных: забойный двигатель и блок управления тягой.
8. Способ по п. 7, отличающийся тем, что
забойный двигатель содержит объемный забойный двигатель; и
блок управления тягой содержит по меньшей мере одну выдвижную консоль для крепления блока управления тягой к пласту.
9. Способ по любому одному из пп. 1 или 2, дополнительно включающий
обновление модели при помощи полученных данных измерений, если полученные данные измерений находятся вне набора ожидаемых данных измерений, образованных из модели и набора данных отклонения; и
определение новых эксплуатационных ограничений, основанных по меньшей мере частично на обновленной модели.
10. Способ по любому одному из пп. 1 или 2, дополнительно включающий
определение по меньшей мере одного параметра бурения буровой компоновки на основании полученных данных измерений; и
выявление неисправности в одном или более элементах буровой компоновки, основанное по меньшей мере частично на определенном параметре бурения.
11. Система управления буровой компоновкой, содержащая:
датчик внутри ствола скважины в пласте;
регулируемый элемент; и
процессор, коммуникационно присоединенный к датчику и регулируемому элементу, при этом процессор присоединен к запоминающему устройству, содержащему набор команд, выполнение которых процессором побуждает процессор
получать данные измерений от датчика;
определять эксплуатационное ограничение для буровой компоновки, основанное по меньшей мере частично на модели пласта и наборе данных отклонения, причем это эксплуатационное ограничение содержит верхний и нижний пределы количества скручиваний в колонне бурильных труб буровой компоновки;
генерировать управляющий сигнал для изменения одного или более параметров бурения буровой компоновки, основанный по меньшей мере частично на данных измерений и эксплуатационном ограничении; и передавать управляющий сигнал к регулируемому элементу.
12. Система по п. 11, отличающаяся тем, что один или более параметров бурения включают по меньшей мере один из указанных: параметр осевой нагрузки на долото (WOB), параметр момента вращения долота (ТОВ), скорость вращения бурового долота, скорость потока бурового раствора и угол торца долота в составе элемента буровой компоновки.
13. Система по п. 11 или 12, отличающаяся тем, что:
процессор и регулируемый элемент по меньшей мере частично находятся внутри ствола скважины; и
регулируемый элемент содержит по меньшей мере один из указанных: забойный двигатель или блок управления тягой.
14. Система по п. 13, отличающаяся тем, что
забойный двигатель содержит объемный забойный двигатель;
блок управления тягой содержит по меньшей мере одну выдвижную консоль для крепления блока управления тягой к пласту.
15. Система по п. 11 или 12, отличающаяся тем, что
процессор расположен на поверхности пласта; и
регулируемый элемент содержит по меньшей мере один из указанных: крюк в сборе, насос и верхний силовой привод.
16. Система по п. 11 или 12, отличающаяся тем, что
регулируемый элемент расположен на поверхности пласта;
процессор расположен либо на поверхности пласта, либо внутри ствола скважины; и
набор команд, который побуждает процессор передавать управляющий сигнал к регулируемому элементу, дополнительно побуждает процессор
передавать первый управляющий сигнал к регулируемому элементу; и
передавать второй управляющий сигнал ко второму регулируемому элементу внутри ствола скважины.
17. Система по п. 12, отличающаяся тем, что
данные измерения включают значение измерений первого угла торца долота в составе блока управления, к которому присоединен датчик; и
набор команд, который побуждает процессор генерировать управляющий сигнал, дополнительно побуждает процессор
определять текущее количество поворотов на основании первого угла торца долота и второго угла торца долота участка колонны бурильных труб вблизи поверхности; и
генерировать управляющий сигнал для изменения одного или более из указанных: ТОВ, WOB и скорости вращения бурового долота, если текущее количество поворотов находится вне верхнего и нижнего пределов.
18. Система по п. 12, отличающаяся тем, что
данные измерений включают значение измерений WOB и значение измерений ТОВ;
эксплуатационное ограничение содержит комбинации параметров бурения WOB и ТОВ для буровой компоновки, которая минимизирует биение бурового долота; и
набор команд, который побуждает процессор генерировать управляющий сигнал, дополнительно побуждает процессор генерировать управляющий сигнал для изменения одного или более из указанных параметров бурения, ТОВ и WOB, таким образом, что измененные параметры бурения ТОВ и WOB включают одну из комбинаций параметров бурения WOB и ТОВ, которая минимизирует биение бурового долота.
19. Система по любому из пп. 11 или 12, отличающаяся тем, что набор команд дополнительно побуждает процессор
обновлять модель при помощи полученных данных измерения, если полученные данные измерения находятся за пределами набора ожидаемых данных измерения, сгенерированных исходя из модели и набора данных отклонения; и
определять новые эксплуатационные ограничения, основанные по меньшей мере частично на обновленной модели.
20. Система по любому из пп. 11 или 12, отличающаяся тем, что набор команд дополнительно побуждает процессор
определять по меньшей мере один параметр бурения буровой компоновки на основании полученных данных измерения; и
выявлять неисправность в одном или более элементах буровой компоновки по меньшей мере частично на основании определенного параметра бурения.
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ В СКВАЖИНЕ И СИСТЕМА БУРЕНИЯ СКВАЖИНЫ | 2003 |
|
RU2244117C2 |
| EA 201070263 A1, 30.08.2010 | |||
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО И СПОСОБЫ ДЛЯ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ | 2008 |
|
RU2471980C2 |
| Способ управления буровым агрегатом и устройство для его осуществления | 1978 |
|
SU1055863A1 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ БУРОВЫХ РАБОТ НА НЕФТЯНОМ МЕСТОРОЖДЕНИИ С ИСПОЛЬЗОВАНИЕМ СПОСОБОВ ВИЗУАЛИЗАЦИИ | 2008 |
|
RU2452855C2 |
| WO 2013101984 A2, 04.07.2013 | |||
| US 20110174541 A1, 21.07.2011. | |||

