Изобретение относится к железнодорожному транспорту и касается технологической оснастки ремонта и технического обслуживания подвижного состава.
В локомотивных и вагонных депо, а также на полигонах технического обслуживания подвижного состава ремонт колесных пар требует постановки на технологические рельсовые линии устройств оперативного вращения колесных пар для осмотра и неразрушающего контроля. Эта задача решается, как правило, путем монтажа в рассечке рельсовой колеи каткового механизма, представляющего собой два вала с роликами, снабженных приводом, с возможностью обеспечения контактного взаимодействия поверхностей качения этих роликов с поверхностями катания колес колесной пары при наезде последней в промежуток рассеченных рельсов.
Однако при таком наезде колесная пара как бы «проваливается» в этот промежуток и падает на ролики, создавая удары на роликовые опоры. При наличии дефектов на поверхностях катания колесной пары типа ползуна или выщербины формируются ударные циклы, воздействие которых ускоряет разрушение катковых роликов. Приведенные недостатки свидетельствует о низкой надежности этого технического решения.
Известен катковый механизм, выполненный ремонтным вагонным депо (ВЧДР) Омск-Сортировочный АО Первой вагоноремонтной компании (ВРК-1), по рационализаторскому предложению Валькова В.В. №396 от 15.03.2013 г. «Приспособление для вращения колесной пары с подвижной площадкой плавающего типа на участке неразрушающего контроля». Данное приспособление принято за прототип. Оно представляет собой две рамы, одна из которых «утоплена» в приямок и является основанием, а другая, верхняя, площадкой (или платформой) смонтирована на штоке вертикально ориентированного пневмоцилиндра, которая сверху оборудована приводом вращения со связанными с ним двумя валами, снабженными на их оконечностях роликами, взаимодействующими с гребнями колесной пары. Верхняя рама имеет возможность вертикального перемещения по четырем направляющим относительно основания. Последние снабжены ограничителями подъема.
Однако прототипу присущи следующие недостатки.
Закрепление платформы по ее центру снизу на штоке пневмоцилиндра не может обеспечить устойчивого горизонтального ее положения: при скатывании колесной пары с технологической рельсовой колеи на платформу она испытывает раскачку и колебания и, как следствие, преждевременный износ кинематических пар как в пневмоцилиндре, так и в упомянутых направляющих, что снижает надежность данного приспособления. Закрепление же платформы на большем количестве пневмоцилиндров подъема существенно снизит технологичность конструкции, что проявится особенно при пусконаладке и техническом обслуживании такого каткового механизма. Кроме того, опыт эксплуатации приспособления показал, что в результате возникающей повышенной концентрации напряжений под гребнями в зоне контакта с поверхностями катания роликовых опор на последних образуются углубляющиеся со временем желобообразные канавки, заставляющие довольно часто производить трудоемкую операцию разборки механизма для смены роликов, что снижает технологичность конструкции прототипа.
Целью изобретения является повышение надежности и технологичности подъемно-каткового механизма.
Она достигается тем, что подъемно-катковый механизм, содержащий катковый механизм с приводом вращения роликовых опор, закрепленных на оконечностях двух валов, осуществляющий взаимодействие колесной пары с рельсами технологической колеи и расположенный над основанием, выполненным в виде, например, выема прямоугольного сечения, согласно изобретению дополнен блоком управления и поворотной платформой в виде прямоугольной рамы, консольно подвешенной одной своей стороной к стенке основания и опертой противоположной на торец штока пневмоцилиндра подъема, у которого корпус установлен вертикально в донной части основания, а полости сообщены с централизованной пневмосетью через блок управления, валы механизма размещены в буксовых узлах на поперечных сторонах рамы, причем вал, наиболее удаленный от упомянутого штока, смонтирован со смещением своей осью вверх относительно линии между осями вращений данного вала и поворотной рамы, с возможностью синхронно-контактного взаимодействия роликовых опор на обоих валах с гребнями соответствующих колес, при этом роликовые опоры снабжены втулками, напрессованными на их катковые части и выполненными из стали повышенной твердости, например, в виде колец подшипников качения соответствующего размера, и концевая часть упомянутого штока снабжена подшипником шарнирного типа.
Также упомянутые валы связаны между собой цепной передачей, и один из них связан такой же передачей с приводом вращения, смонтированным на данной поворотной раме; подошвы технологических рельсов с их внутренних сторон в зоне расположения поворотной рамы вырезаны с возможностью беспрепятственных ее поворотных движений; блок управления содержит пневмораспределитель, выполненный четырехканальным двухпозиционным с управлением от выносного пульта, снабженного фиксатором положений «ОПУСК» и «ПОДЪЕМ», причем в первом положении штоковая полость пневмоцилиндра подъема сообщена с пневмосетью и поршневая полость - с атмосферой через управляемый дроссель, а во втором положении - наоборот, и магнитным пускателем, через который привод вращения роликовых опор, выполненный в виде мотор-редуктора с двигателем асинхронным трехфазным, подключен к электросети.
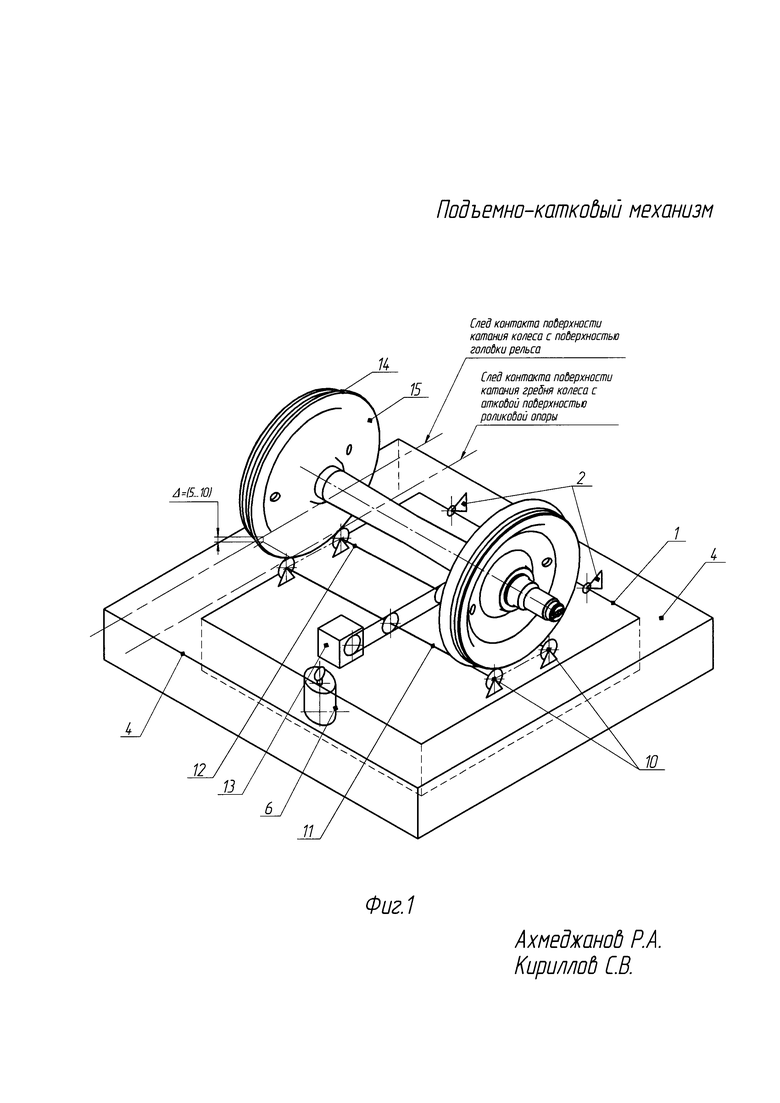
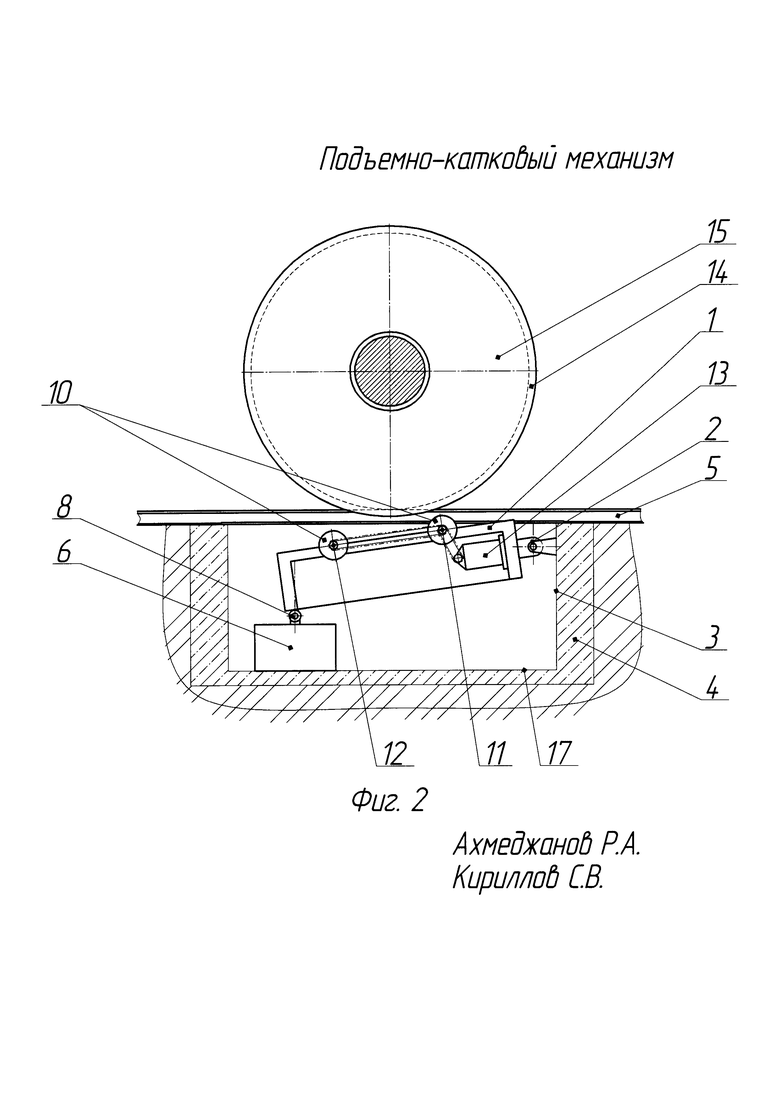
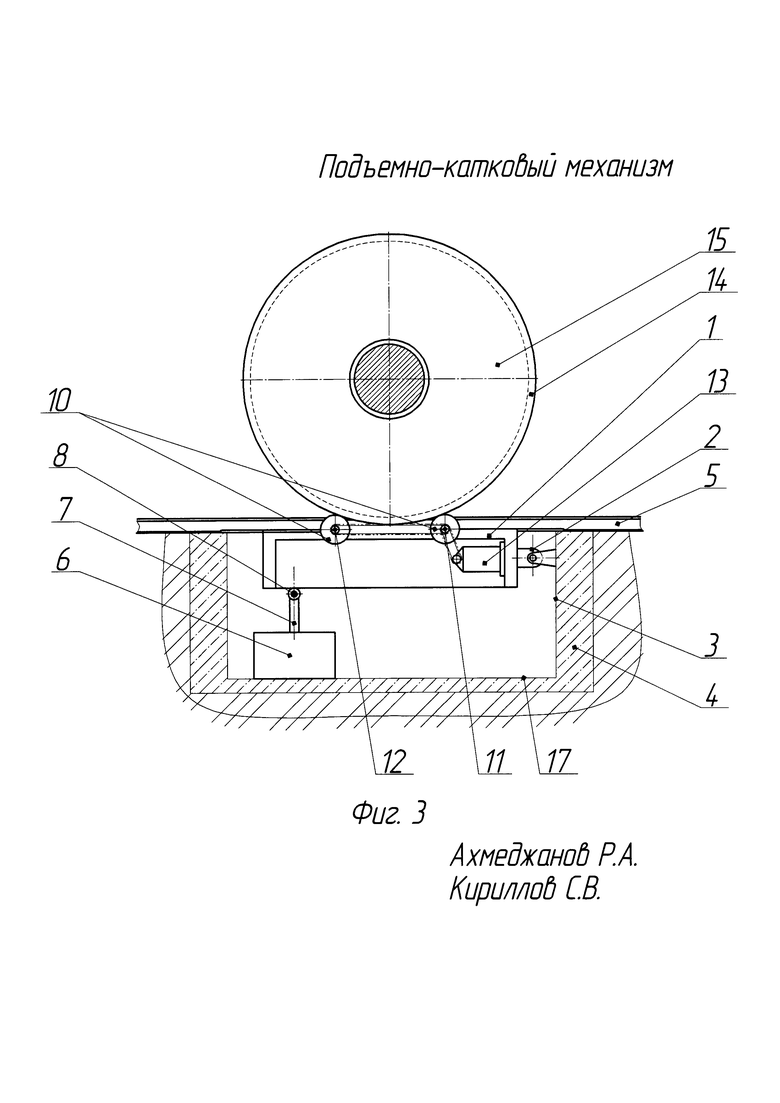
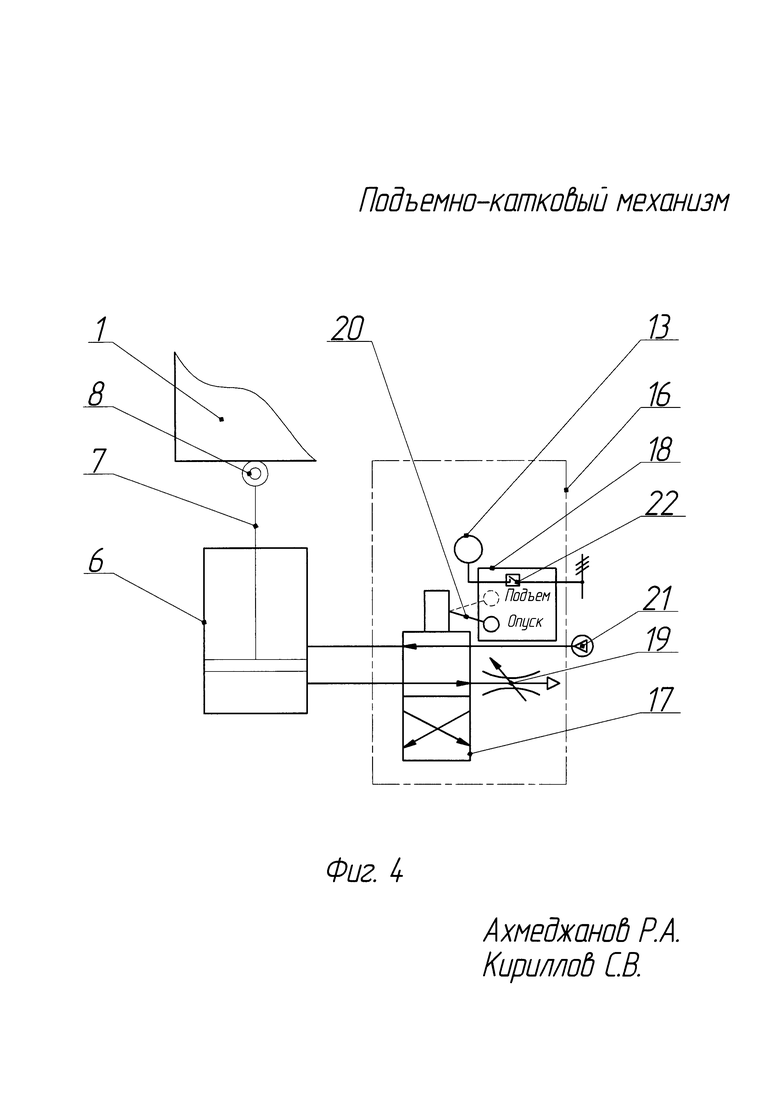
На фиг. 1 представлена компоновочная схема предлагаемого подъемно-каткового механизма, на фиг. 2 и 3 показаны состояния механизма в исходном и рабочем положениях соответственно, на фиг. 4 - схема блока управления.
Подъемно-катковый механизм содержит (фиг. 1, 2, 3) поворотную раму 1 преимущественно прямоугольной формы, которая одной своей стороной консольно подвешена с помощью шарниров 2 к боковой стенке 3 основания 4, выполненного в виде, например, армированного выема под технологическими рельсами 5, пневмоцилиндр подъема 6, у которого шток 7 уперт посредством подшипника 8 в раму 1 снизу на другой (противоположной) ее стороне и корпус 9 закреплен вертикально к донной поверхности основания 4, роликовые опоры 10, жестко закрепленные на оконечностях валов 11 и 12, установленных в буксах на поперечных сторонах поворотной рамы 1, и на ней размещенный привод вращения роликовых опор 10, выполненный в виде мотор-редуктора 13, связанного цепной передачей с ближайшем к нему валом 11. Валы 11 и 12 связаны между собой такой же цепной передачей. При этом каждая пара роликовых опор 10 расположена в одной плоскости качения и строго ориентирована под гребнями 14 соответствующих колес колесной пары 15. Расстояние между валами 11 и 12 выбраны с учетом установления рационального значения угла между нормалями, соединяющими центр каждого колеса колесной пары 15 с центрами роликов 10 в состоянии их взаимодействия с соответствующими гребнями 14. Пара качения 8 выполнена в виде подшипника шарнирного типа. Последние известны своей способностью выдерживать высокую нагрузку при малых скоростях вращения. Количество шарниров 3 для подвески рамы 1 равно двум. Блок управления 16 содержит (фиг. 4) пневмораспределитель 17 четырехканальный двухпозиционный, управляемый от выносного пульта 18, снабженного управляемым дросселем 19 и фиксатором 20 положений «ОПУСК» и «ПОДЪЕМ», с помощью которого обеспечивается доступ сжатого воздуха в поршневую или штоковую полости пневмораспределителя 17 из центролизованной пневмосети 21. Кроме того, пульт 18 оборудован магнитным пускателем 22 в цепи питания мотор-редуктора 13 от электросети.
Исходное положение предлагаемого механизма (фиг. 2): колесная пара 15 взаимодействует после ее подкатки в зону подъема поверхностями катания своих колес с поверхностями катания рельсовой колеи 5; поворотная рама 1 отклонена вниз на угол (примерно 15-20° относительно горизонта), обеспечивающий свободное, беспрепятственное прохождение колесной пары 15 по технологической колее 5, и опирается на подшипник 8 штока 7, занимающего свое нижнее положение; фиксатор 20 установлен в положение «ОПУСК»; мотор-редуктор 13 привода вращения роликовых опор 10 обесточен.
Функционирование подъемно-каткового механизма в рабочем положении состоит в следующем. Устанавливают (фиг. 4) фиксатор 20 в положение «ПОДЪЕМ», сжатый воздух через пневмораспределитель 17 поступает в поршневую полость пневмоцилиндра 6, его шток 7, находясь в контакте с рамой 1, выдвигается, тем самым поворачивая раму 1 до установления ее в горизонтальное положение, которое обусловлено заданным ходом штока 7. При этом (фиг. 3) роликовые опоры 10, плавно входя в синхронный контакт с гребнями 14 колесной пары 15, приподнимают ее, создавая отрыв от поверхности катания рельсов 5 на величину 5-10 мм. Контакт роликовых опор 10 с гребнями 14 совершается без ударов, мягко за счет предварительной настройки управляемого дросселя 19. Затем подключают с помощью магнитного пускателя 22 мотор-редуктор 13 и заставляют вращаться валы 11 и 12, а с ними и роликовые опоры 10. Колесная пара 15, теперь уже опираясь гребнями 14 колес на эти роликовые опоры 10, совершает вращательное движение. Скорость вращения устанавливают «удобной» для проведения осмотра и/или дефектоскопических работ в пределах нескольких оборотов в минуту. При этом завершение рабочего цикла механизма может быть исполнено двумя путями.
В первом из них после проведения контрольной операции продолжают цикл вращения колесной пары 15, но устанавливают фиксатор 22 в положение «ОПУСК». В результате сжатый воздух поступает теперь в штоковую полость пневмоцилиндра 6, его поршень и шток 7 движутся вниз, и рама 1, поворачиваясь в обратную сторону и возвращаясь в исходное положение, устанавливает колесную пару 15 поверхностями качения ее колес на рельсовую колею 5. Колесная пара 15 за счет приобретенного количества движения продолжает, но уже вращательно-поступательное вращение, перекатываясь по технологической колее 5.
Во втором случае - после завершения контрольной операции - мотор-редуктор 13 отключают, и колесная пара 15 прекращает вращение, затем фиксатор 20 устанавливают в положение «ОПУСК», сжатый воздух также поступает в штоковую полость пневмоцилиндра 6. у которого поршень и шток 7 движутся вниз, и рама 1, возвращаясь в исходное положение, устанавливает колесную пару 15 в штатное положение на рельсовую колею 5. Теперь она находится в неподвижном состоянии, и ее перекатку затем можно осуществить вмешательством рабочего персонала.
Изобретение выгодно отличается от прототипа. Платформа в виде поворотной рамы 1 имеет три опорные «точки» вместо одной (в прототипе), причем две из них связаны со стенкой 3 основания 4, поэтому ее качания и колебания исключены; вес колесной пары 15 распределен между этими тремя опорами, и в результате на шток 7 подъемного пневмоцилиндра 6 действует менее половины ее веса; нагружение подъемно-каткового механизма колесной парой 15 происходит мягко, без ударов (этому также способствует соответствующая настройка регулируемого дросселя 19); устранены изнашивания роликовых опор 10 и продавливание желобов на их катковых поверхностях; поскольку вращение проверяемых колесных пар 15 осуществлено на гребнях 14, то наличие дефектов (ползунов, выщербин) на поверхностях катания колес не оказывает негативного влияния на результаты контроля.
Приведенное доказывает, что поставленная цель достигнута.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД МАГНИТОПОРОШКОВОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕС | 2015 |
|
RU2601295C1 |
| СТЕНД ИСПЫТАНИЙ КОЛЕСНЫХ ПАР И ИХ ЭЛЕМЕНТОВ | 2010 |
|
RU2436061C1 |
| УСТРОЙСТВО РЕГИСТРАЦИИ И СЧЕТА ЗУБЬЕВ ЗУБЧАТОГО КОЛЕСА | 2016 |
|
RU2662304C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ВЗАИМОДЕЙСТВИЯ КОЛЕСА С РЕЛЬСОМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА (ВАРИАНТЫ) | 1997 |
|
RU2115908C1 |
| КАТКОВАЯ СТАНЦИЯ | 2004 |
|
RU2268460C1 |
| Стенд для определения динамических нагрузок, возникающих в колесных парах тележки грузового вагона при прохождении кривых участков пути | 2021 |
|
RU2761887C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2423259C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2438897C1 |
| ТРИБОТЕХНИЧЕСКИЙ СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ ИЗ ПЛАСТИЧНЫХ МЕТАЛЛОВ НА ПОВЕРХНОСТИ ТРЕНИЯ ДЕТАЛЕЙ СОЧЛЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2283702C2 |
| БЛОК УДЕРЖАНИЯ СОСТАВА НА СТАНЦИОННОМ ПУТИ | 2015 |
|
RU2578642C1 |
Изобретение относится к железнодорожному транспорту, в частности к подъемно-катковым механизмам. Подъемно-катковый механизм содержит катковый механизм с приводом вращения роликовых опор, закрепленных на оконечностях двух валов, осуществляющий взаимодействие колесной пары с рельсами технологической колеи и расположенный над основанием, выполненным в виде выема прямоугольного сечения. Механизм дополнен блоком управления и поворотной платформой в виде прямоугольной рамы. Рама консольно подвешена одной своей стороной к стенке основания и оперта противоположной на торец штока пневмоцилиндра подъема, у которого корпус установлен вертикально в донной части основания. Валы механизма размещены в буксовых узлах на поперечных сторонах рамы. Вал, наиболее удаленный от упомянутого штока, смонтирован со смещением своей оси вверх относительно линии между осями вращений данного вала и поворотной рамы с возможностью синхронно-контактного взаимодействия роликовых опор на обоих валах с гребнями соответствующих колес. Роликовые опоры снабжены втулками, напрессованными на их катковые части и выполненными из стали повышенной твердости. Концевая часть упомянутого штока снабжена подшипником шарнирного типа. Достигается повышение надежности конструкции подъемно-каткового механизма. 3 з.п. ф-лы, 4 ил.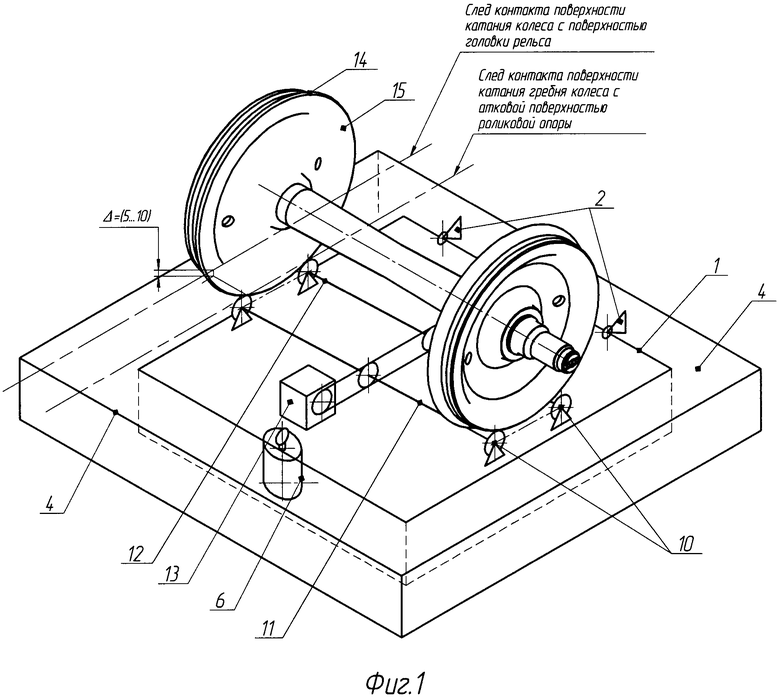
1. Подъемно-катковый механизм, содержащий катковый механизм с приводом вращения роликовых опор, закрепленных на оконечностях двух валов, осуществляющий взаимодействие колесной пары с рельсами технологической колеи и расположенный над основанием, выполненным в виде, например, выема прямоугольного сечения, отличающийся тем, что он дополнен блоком управления и поворотной платформой в виде прямоугольной рамы, консольно подвешенной одной своей стороной к стенке основания и опертой противоположной на торец штока пневмоцилиндра подъема, у которого корпус установлен вертикально в донной части основания, а полости сообщены с централизованной пневмосетью через блок управления, валы механизма размещены в буксовых узлах на поперечных сторонах рамы, причем вал, наиболее удаленный от упомянутого штока, смонтирован со смещением своей оси вверх относительно линии между осями вращений данного вала и поворотной рамы, с возможностью синхронно-контактного взаимодействия роликовых опор на обоих валах с гребнями соответствующих колес, при этом роликовые опоры снабжены втулками, напрессованными на их катковые части и выполненными из стали повышенной твердости, например, в виде колец подшипников качения соответствующего размера, и концевая часть упомянутого штока снабжена подшипником шарнирного типа.
2. Подъемно-катковый механизм по п. 1, отличающийся тем, что упомянутые валы связаны между собой цепной передачей, и один из них связан такой же передачей с приводом вращения, смонтированным на данной поворотной раме.
3. Подъемно-катковый механизм по п. 1, отличающийся тем, что подошвы технологических рельсов с их внутренних сторон в зоне расположения поворотной рамы вырезаны с возможностью беспрепятственных ее поворотных движений.
4. Подъемно-катковый механизм по п. 1, отличающийся тем, что блок управления содержит пневмораспределитель, выполненный четырехканальным двухпозиционным с управлением от выносного пульта, снабженного фиксатором положений «ОПУСК» и «ПОДЪЕМ», причем в первом положении штоковая полость пневмоцилиндра подъема сообщена с пневмосетью и поршневая полость - с атмосферой через управляемый дроссель, а во втором положении - наоборот, и имеет магнитный пускатель, через который привод вращения роликовых опор, выполненный в виде мотор-редуктора с двигателем асинхронным трехфазным, подключен к электросети.
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ ИСПЫТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2211443C2 |
| СТЕНД ДЛЯ ДИАГНОСТИКИ ТЕЛЕЖЕК ПАССАЖИРСКИХ ВАГОНОВ | 2006 |
|
RU2315276C1 |
| Устройство для регулированияНАпРяжЕНия | 1978 |
|
SU802101A1 |

