Изобретение относится к области добычи нефти и может быть использовано для привода штанговых скважинных насосов.
Известна конструкция безбалансирного привода штангового скважинного насоса, содержащего установленные на единой раме электродвигатель, редуктор, кривошипно-шатунный механизм преобразования вращательного движения выходного вала редуктора в возвратно-поступательное движение гибкой связи, стойку со шкивом и гибкую связь, соединяющую траверсу с механизмом, обеспечивающим возвратно-поступательное движение (ГОСТ Р 51763-2001, Приводы штанговых скважинных насосов, Общие технические требования. ГОССТАНДАРТ РОССИИ, Москва - стр. 4, рис. 2).
К недостаткам данного безбалансирного станка-качалки можно отнести большую металлоемкость, ограничение длины хода траверсы длиной шатуна, сложность конструкции.
Наиболее близким по технической сущности является станок-качалка с плавным регулирование производительности, содержащий опорную вышку, направляющие и отклоняющие шкивы, лебедку с двумя асинхронными двигателям (Патент на изобретение №2270366, F04B 47/02 от 30.01.2004 г.).
Недостатком такого станка-качалки является то, что длина хода колонны штанг ограничена длиной опорной вышки. Также к недостаткам можно отнести сложность и трудоемкость изменения длины хода и числа качаний подвески штанг, сокращение длины хода в случае увеличения нагрузки на полированном штоке вследствие отложения парафинов. Также наличие упругих верхних ограничителей снижает коэффициент полезного действия системы и приводит к повышенным нагрузкам на лебедку и асинхронные двигатели.
Задачей данного изобретения является повышение эффективности работы штанговой скважинной насосной установки, а также повышение эффективности эксплуатации скважин штанговыми глубинными насосами.
Техническая задача решается тем, что в приводе штангового насоса, состоящего из рамы, асинхронного электродвигателя, приводящего через редуктор барабан с канатом, причем канат, проходя через шкив, установленный на стойках – опорах, и устьевой сальник соединяется с колонной штанг, станции управления с частотно-регулируемым приводом, датчика положения барабана и датчика нагрузки на шкив, причем при движении колонны штанг вниз асинхронный электродвигатель работает в режиме генератора и выполняет функцию тормоза.
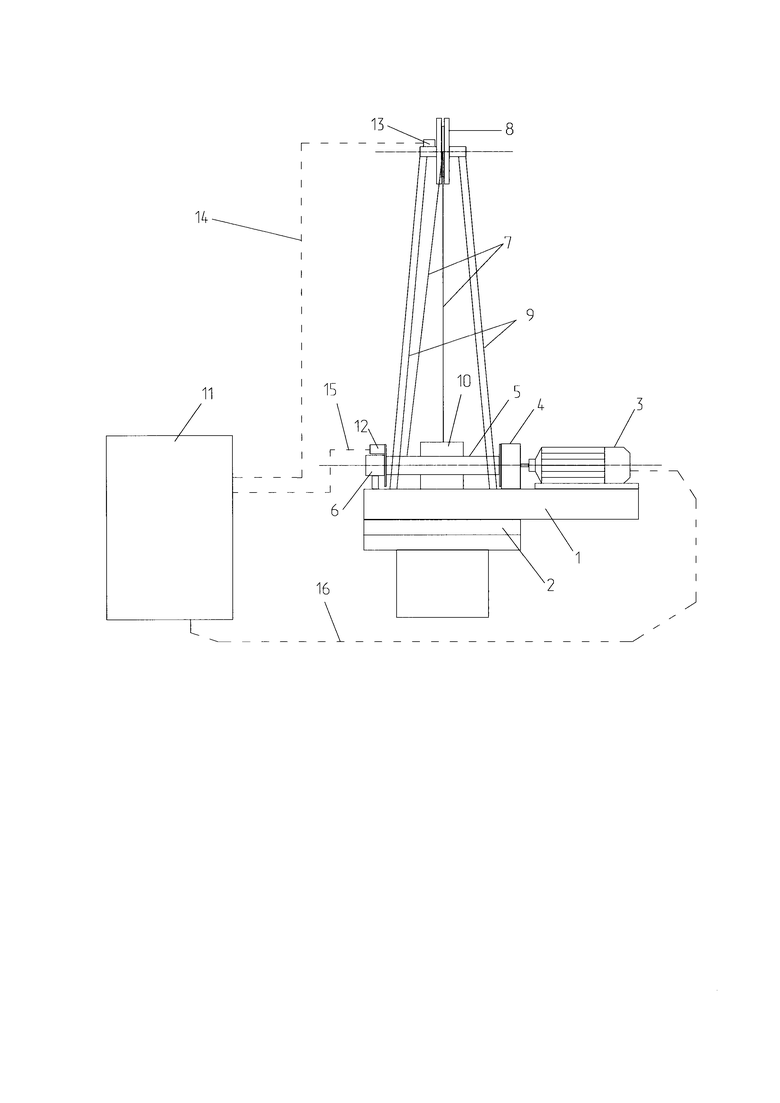
На фигуре показан привод штангового скважинного насоса.
Длинноходовой безбалансирный привод скважинного насоса содержит раму 1, установленную на фланец устья скважины 2. На раме 1 установлены асинхронный электродвигатель 3, редуктор 4, барабан 5 с кантом 7, подшипниковая опора 6, стойки-опоры 9 с установленным на них шкивом 8. К станции управления с частотно-регулируемым приводом 11 подключены по сигнальным кабелям 14, 15 датчик нагрузки на шкив 13 и датчик положения барабана 12 соответственно, по силовому кабелю 16 подключен электродвигатель 3. Устьевой сальник 10.
Длинноходовой безбалансирный привод скважинного насоса работает следующим образом.
Вращение от вала асинхронного электродвигателя 3 через редуктор 4 передается на барабан 5. На вращающийся барабан укладывается канат 7, который, проходя через шкив 8, устьевой сальник 10, предает поступательное движение вверх колонне штанг скважинного насоса. Датчик положения барабана 12 учитывает количество оборотов барабана 5 и по сигнальному кабелю 15 передает данные в станцию управления с частотно-регулируемым приводом 11, который останавливает асинхронный электродвигатель при достижении заданной длины хода колонны штанг вверх. Далее под действием веса колонны штанг и жидкости над плунжером скважинного насоса происходит обратный процесс схода каната 7 с барабана 5 и перемещение колонны штанг вниз. При этом станция управления частотно-регулируемым приводом 11 переводит асинхронный электродвигатель 3 в генераторный режим и происходит процесс накапливания энергии торможения в первом. После достижения заданной длины хода колонны штанг вниз, на основании показаний датчика положения барабана 12, станция управления с частотно - регулируемым приводом запускает асинхронный электродвигатель 3 в обратном направлении. После чего цикл повторяется.
Изменение длины хода и частоты качаний подвески штанг происходит в автоматическом режиме на основании информации, получаемой с датчика нагрузки на шкиве 13. При снижении нагрузки станция управления снижает скорость вращения асинхронного электродвигателя 3 либо наоборот - в противном случае. Смена длины хода подвески штанг также происходит без остановки работы штангового скважинного насоса, за счет изменения времени работы асинхронного электродвигателя 3.
Достоинства предлагаемого привода
Длина хода колонны штанг не ограничена высотой стоек-опор 9, что позволяет увеличить ресурс работы штангового скважинного насоса, за счет увеличения длины хода и сокращения числа качаний. Плавное и автоматическое изменение длины хода и числа качаний, позволяет оперативно подстраивать производительность скважинного насоса под параметры притока из скважины, что повышает эффективность процесса добычи нефти.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2135832C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2016 |
|
RU2613477C1 |
| Безбалансирный привод штангового глубинного насоса | 2016 |
|
RU2627475C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721068C1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2017 |
|
RU2672241C1 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2455526C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2715120C1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 2012 |
|
RU2488023C1 |
Изобретение относится к области добычи нефти и предназначен для эксплуатации скважин штанговыми насосами. Содержит шкив, установленный на стойках и опорах, асинхронный электродвигатель, редуктор, барабан с канатом, свободный конец которого соединен с колонной штанг. Содержит станцию управления с частотно-регулируемым приводом, связанную с датчиком положения барабана и датчиком нагрузки на шкив. При движении колонны штанг вниз асинхронный электродвигатель работает в режиме генератора и выполняет функцию тормоза. Позволяет повысить эффективность работы путем увеличения длины хода плунжера и уменьшения числа качаний, а также плавного регулирования производительности глубиннонасосного оборудования. 1 ил.
Привод штангового насоса, содержащий раму, асинхронный электродвигатель, барабан, шкив, стойки-опоры, отличающийся тем, что барабан выполнен цельным и соединен с асинхронным электродвигателем через редуктор, канат, находящийся на барабане, одним концом соединен с колонной штанг, датчики положения барабана и нагрузки на шкиве подключены к станции управления с частотно-регулируемым приводом, а асинхронный электродвигатель при работе в режиме генератора обеспечивает торможение барабана.
| Станок-качалка для привода штангового глубинного насоса | 1981 |
|
SU987176A1 |
| СТАНОК-КАЧАЛКА С ПЛАВНЫМ РЕГУЛИРОВАНИЕМ ПРОИЗВОДИТЕЛЬНОСТИ | 2004 |
|
RU2270366C2 |
| ПРИВОД ГЛУБИННОГО НАСОСА | 1999 |
|
RU2163311C1 |
| US 6497281 B2, 24.12.2002 | |||
| US 4601640 A, 22.07.1986. | |||

