Изобретение относится к способам проведения исследований и мониторинга протяженных объектов на поверхности Земли в ходе дистанционного зондирования (ДЗЗ) и может быть использовано как для оперативной идентификации и повышения точности определения местоопределения целевых объектов, так и для оценки характеристик местоположения космического аппарата.
Заявленное изобретение направлено как на решение задач собственно идентификации, так и на повышение точности определения местоположения и расположения в местной системе координат целевого объекта за счет учета его расположения относительно соседних с ним объектов.
Поставленная задача возникает при мониторинге состояния объектов сельхозназначения, инфраструктуры объектов железнодорожного и автомобильного транспорта, сети трубопроводов различного назначения, а также для решения навигационной задачи на космических аппаратах и т.п.
Изобретение относится к вычислительной технике и может быть использовано в системах технического зрения для идентификации протяженных объектов земной поверхности на изображении.
Известен способ распознавания сложного графического объекта (Патент Россия 2005 г. №2297039 Россия, кл. G06K 9/62), заключающийся в том, что изображения всех эталонных объектов разбивают на пересекающиеся доменные блоки, представляющие собой часть изображения в виде квадрата, а изображение анализируемого объекта разбивают на непересекающиеся ранговые блоки, размер которых меньше доменных блоков, и производят поиск наилучшего сопоставления всех ранговых блоков анализируемого изображения и доменных блоков всех эталонных изображений с использованием сжимающих аффинных преобразований, результат подают на классификатор, а затем принимают решение о совпадении изображений анализируемого объекта с эталонным, отличающийся тем, что одновременно с поиском доменно-ранговых сопоставлений для каждого эталонного объекта формируют векторы расстояний между геометрическими центрами сопоставленных доменных, для эталонного объекта, и ранговых, для анализируемого объекта, блоков, записывают их в виде таблицы, после завершений сопоставления таблицу подают на классификатор, а решение о совпадении анализируемого изображения с одним из эталонных принимают по наименьшему расстоянию между анализируемым и эталонным изображением, полученному от классификатора.
Наиболее близким к предлагаемому является способ идентификации объектов (Патент 2234127, Россия, кл. G06K 9/68), который предусматривает предварительное приведение изображения объекта, вводимого в компьютер, к нормальному, стандартному для данного способа виду - изменению масштаба, поворот в требуемое положение, центрирование, вписывание в прямоугольник требуемого размера, преобразование изображения объекта в изображение, выполненное в градациях - различных степенях яркости - одного цвета, на которое последовательно, поочередно накладываются изображения хранящихся в памяти компьютера шаблонов, отличающийся тем, что программа распознавания объектов может пошагово совмещать нормализованные изображения распознаваемых объектов, центрированных и вписанных в одинаковых размеров ячейки таблицы и шаблонов, центрированных и вписанных в аналогичные ячейки таблицы шаблонов, с шагом, равным высоте строки с ячейками или ширине столбца ячеек таблиц, причем в каждом из столбцов или в каждой из строк таблицы шаблонов, число которых равно числу столбцов или строк в таблице распознаваемых объектов, находится полный комплект шаблонов.
Недостатками данного способа являются отсутствие инвариантности к аффинным преобразованиям поворота объекта, а также необходимость полного перебора шаблонов больших размеров при распознавании.
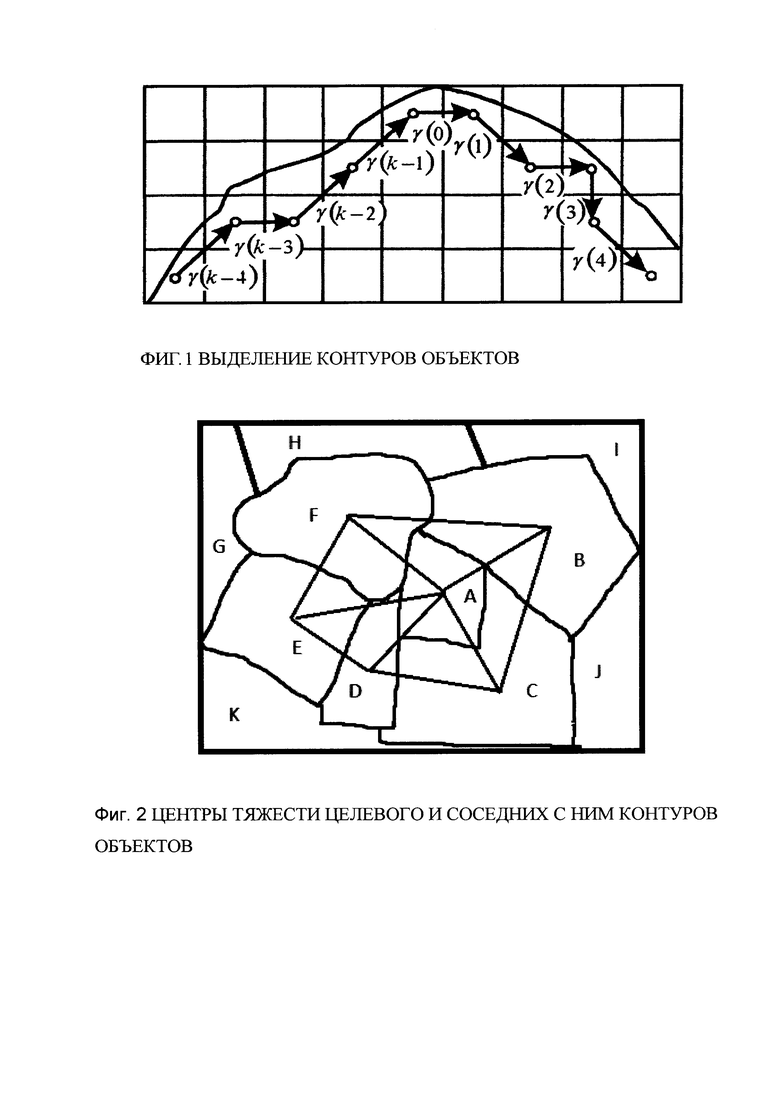
Для устранения этих недостатков в предлагаемом способе идентификации протяженных объектов земной поверхности на космических снимках выполняют предварительную обработку исходного изображения, приведение изображения объекта, вводимого в вычислительное устройство, к нормальному, стандартному для данного способа видоизменения масштабу, центрирование, вписывание в прямоугольник требуемого размера, выделение контуров (Фиг. 1) всех объектов на космическом снимке, формирование признаков распознавания, инвариантных к повороту, поочередное сравнение с хранящимися в памяти компьютера эталонами, которые хранят в виде векторной модели, сравнивают их посредством нейросети, причем сравнение производят путем анализа признаков формы контура каждого из находящихся на изображении объектов земной поверхности, производят сравнение по каждому признаку, и принимают решение о совпадении векторных моделей целевого объекта на изображения и эталонных объектов.
Кроме целевого идентифицируют и соседние с ним объекты, определяют центры тяжести целевого и соседних с ним контуров объектов, строят графы (Фиг. 2) и матрицы связности совокупности протяженных объектов, которые используют в качестве дополнительных признаков идентификации, производится их сравнение и принимается решение об идентификации целевого объекта.
Сущность предлагаемого способа состоит в том, что космический снимок участка земной поверхности фиксируется, а полученные цифровые растровые изображения подвергают обработке. Используя цепной код Фримена по связности 4, выделяются контуры объектов. Затем выделяют точки начала обхода контуров, в качестве которых используются, крайние: верхняя, правая, левая и нижняя. Далее выполняют обход, относительно каждой из начальных точек, внешнего контура объекта. Во время обхода производится получение признаков (расчет числовых коэффициентов) согласно формулам (1) и (2):


где Fx, Fy - преобразования Лапласа параметрического описания контура распознаваемого объекта; lx и ly - значения элементарных векторов на шаге x и y соответственно, при движении по контуру от первой (0) до последней (S) точки; w - коэффициент веса.
Рассчитанные коэффициенты последовательно используются в качестве входных параметров нейронной сети. Предварительно обученная трехслойная нейронная сеть на вход последовательно получает двумерный массив признаков формы. Учитывая информацию из всех источников, принимается решение по идентификации объекта.
Для повышения достоверности идентификации целевого объекта и точности места его расположения используются принципы кворумного резервирования (Л.Б. Гройсберг, М.Д. Линденбаум. Расчет надежности систем с произвольной структурой при общем кворумном резервировании / Изв. АН СССР, Техническая кибернетика, №2, 1974, с. 66-70).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ МЕТОДОМ НЕЧЕТКОЙ ТРИАНГУЛЯЦИИ ДЕЛОНЕ | 2018 |
|
RU2729557C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2007 |
|
RU2361273C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ ЧЕЛОВЕКА ПО ЦИФРОВОМУ ИЗОБРАЖЕНИЮ ЛИЦА | 2014 |
|
RU2613852C2 |
| СПОСОБ РАСПОЗНАВАНИЯ СЛОЖНОГО ГРАФИЧЕСКОГО ОБЪЕКТА | 2005 |
|
RU2297039C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПЕЧАТИ НА ЦИФРОВОМ ИЗОБРАЖЕНИИ | 2014 |
|
RU2560789C1 |
| СПОСОБ РАСПОЗНАВАНИЯ И КЛАССИФИКАЦИИ ФОРМЫ ОБЪЕКТОВ В ЛАБИРИНТНЫХ ДОМЕННЫХ СТРУКТУРАХ | 2012 |
|
RU2522869C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ОБРАЗОВ НА ЦИФРОВОМ ИЗОБРАЖЕНИИ | 2013 |
|
RU2536677C2 |
| Программно-аппаратный комплекс, предназначенный для обработки аэрокосмических изображений местности с целью обнаружения, локализации и классификации до типа авиационной и сухопутной техники | 2021 |
|
RU2811357C2 |
| СРЕДСТВО ЦВЕТОВОЙ ИДЕНТИФИКАЦИИ СОСТОЯНИЯ СИСТЕМЫ | 2023 |
|
RU2824435C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2016 |
|
RU2664411C2 |
Изобретение относится к вычислительной технике. Технический результат заключается в повышении точности определения местоположения и расположения в местной системе координат целевого объекта. Такой результат достигается тем, что выполняют предварительную обработку исходного изображения, приведение изображения объекта, вводимого в вычислительное устройство, к нормальному, стандартному для данного способа видоизменения масштабу, центрирование, вписывание в прямоугольник требуемого размера, поочередное сравнение с хранящимися в памяти компьютера шаблонами, которые хранят в виде векторной модели, которую сравнивают с поданным на вход изображением посредством нейросети. Сравнение производят путем анализа признаков формы контура каждого из находящихся на изображении объектов земной поверхности, причем производят сравнение по каждому признаку, и принимают решение о совпадении векторных моделей целевого объекта на изображения и эталонных объектов. 2 ил.
Способ идентификации протяженных объектов земной поверхности на космических снимках, при котором выполняют предварительную обработку исходного изображения, приводят изображение объекта, вводимого в вычислительное устройство, к единому масштабу, центрируют, вписывают в прямоугольник требуемого размера, поочередно сравнивают с находящимися в памяти компьютера эталонными объектами, которые хранят в виде векторной модели, которую сравнивают с поданным на вход изображением посредством нейросети, отличающийся тем, что сравнение производят путем сопоставления интегральных признаков формы контура, вычисленных по формулам, для каждого из находящихся на изображении объектов земной поверхности, причем производят сравнение по каждому признаку, и принимают решение о совпадении векторных моделей целевого объекта на изображения и эталонных объектов, затем идентифицируют и соседние с целевым объекты, определяют центры тяжести целевого и соседних с ним контуров объектов, строят матрицы связности совокупности протяженных объектов, которые используют в качестве дополнительных признаков идентификации, производят их сравнение и принимают решение об окончательной идентификации целевого объекта.
| СПОСОБ КОМПЬЮТЕРНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2002 |
|
RU2234127C2 |
| US 5133026 A, 21.07.1992 | |||
| US 5081690 A, 14.01.1992 | |||
| СПОСОБ КОМПЬЮТЕРНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 1999 |
|
RU2191431C2 |
| СПОСОБ РАСПОЗНАВАНИЯ СЛОЖНОГО ГРАФИЧЕСКОГО ОБЪЕКТА | 2005 |
|
RU2297039C2 |

