Изобретение относится к вычислительной технике и может быть использовано в системах технического зрения для идентификации объектов на изображении.
Известен способ распознавания сложного графического объекта (Патент №2005111353 Россия, кл. G06K9/62) заключающийся в том, что изображения всех эталонных объектов разбивают на пересекающиеся доменные блоки, представляющие собой часть изображения в виде квадрата, а изображение анализируемого объекта разбивают на непересекающиеся ранговые блоки, размер которых меньше доменных блоков, и производят поиск наилучшего сопоставления всех ранговых блоков анализируемого изображения и доменных блоков всех эталонных изображений с использованием сжимающих аффинных преобразований, результат подают на классификатор, а затем принимают решение о совпадении изображений анализируемого объекта с эталонным, отличающийся тем, что одновременно с поиском доменно-ранговых сопоставлений для каждого эталонного объекта формируют векторы расстояний между геометрическими центрами сопоставленных доменных, для эталонного объекта, и ранговых, для анализируемого объекта, блоков, записывают их в виде таблицы, после завершений сопоставления таблицу подают на классификатор, а решение о совпадении анализируемого изображения с одним из эталонных принимают по наименьшему расстоянию между анализируемым и эталонным изображением, полученному от классификатора.
Наиболее близким к предлагаемому является способ компьютерного распознавания объектов (Патент №2234127 Россия, кл. G06K 9/68). Способ компьютерного распознавания объектов, программа которого предусматривает предварительное приведение изображения объекта, вводимого в компьютер, к нормальному, стандартному для данного способа виду - изменению масштаба, поворот в требуемое положение, центрирование, вписание в прямоугольник требуемого размера, преобразование изображения объекта в изображение, выполненное в градациях - различных степенях яркости - одного цвета, на которое последовательно, поочередно накладываются изображения хранящихся в памяти компьютера шаблонов, отличающийся тем, что программа распознавания объектов может пошагово совмещать нормализованные изображения распознаваемых объектов, центрированных и вписанных в одинаковых размеров ячейки таблицы и шаблонов, центрированных и вписанных в аналогичные ячейки таблицы шаблонов, с шагом, равным высоте строки с ячейками или ширине столбца ячеек таблиц, причем в каждом из столбцов или в каждой из строк таблицы шаблонов, число которых равно числу столбцов или строк в таблице распознаваемых объектов, находится полный комплект шаблонов.
Недостатками данного способа являются отсутствие инвариантности к аффинным преобразованиям поворота объекта в трехмерном пространстве и отсутствие возможности задавать параметры шаблона, а также необходимость полного перебора шаблонов при распознавании.
Технической задачей является повышение точности и качества распознавания за счет использования трехмерной векторной модели эталона объекта.
Способ заключается в следующем: эталонное изображение хранят в виде векторной трехмерной модели; для каждой такой модели фиксируют набор параметров для аффинных преобразований: углы поворота по осям х, у, z и масштаб. Этот набор параметров определяют для каждой модели с учетом сложности ее формы: чем сложнее форма, тем большее количество ракурсов необходимо для наиболее полного описания возможных вариантов положения объекта в пространстве, с тем, чтобы наиболее точно произвести идентификацию.
Производят следующую последовательность действий: получают векторную трехмерную модель эталонного объекта путем геометрического построения, затем, изменяя ее положение в пространстве (поворот, отражение, масштабирование), получают ряд вышеуказанных параметров, которые сохраняют и используют в дальнейшем при распознавании для воссоздания соответствующего ракурса эталона объекта.
Плоское изображение представляют в виде двумерного массива, элементами которого являются значения от 0 до 255 - градации серого цвета.
Помимо указанных параметров в набор включают дополнительно соотношение сторон габаритного изображения контейнера объекта и кодированное представление объекта, которое позволяет определить его положение внутри габаритного контейнера. Под габаритным контейнером подразумевают минимальную прямоугольную область на плоскости, в которую вписывается изображение объекта. Кодирование производят разбиением габаритного контейнера на 25 одинаковых областей и определением наличия части объекта в каждой из них. Таким образом, получают 25-битный код данного ракурса объекта в двоичном виде: если часть изображения объекта находится в области, то ее помечают единицей; иначе нулем. Код получают перебором значений меток в областях слева направо, сверху вниз. Эти дополнительные параметры существенно уменьшают объем перебираемых при распознавании вариантов.
На вход распознавателя подается изображение, представленное массивом пикселей в градациях серого, то есть каждый элемент массива имеет значение от 0 до 255. Размерность массива зависит от параметров дискретизации изображения. Распознавание производят следующим образом: определяют габаритный контейнер входного изображения объекта, затем кодируют вышеуказанным способом. Исходя из отношения сторон габаритного контейнера и полученного кода, выбирают набор параметров из базы эталонов. Затем выполняют преобразование векторной модели эталонного объекта соответственно установленным ранее параметрам: поворот и масштабирование. После этого строят плоское изображение модели эталона, которое сравнивают с поданным на вход изображением посредством нейросети типа персептрон. Сравнение производят путем анализа градаций серого для каждой дискретной области изображения: производят попиксельное сравнение. Находят модуль разности для каждой пары пикселей изображения, поданного на вход распознавателя, и полученной проекции векторной модели эталонного объекта и сравнивают его с пороговым значением. Полученные данные подают на вход нейросети типа персептрон, в зависимости от значения функции активации которой принимают решение о схожести проекции векторной модели эталонного объекта и входного изображений.
Известно устройство для распознавания объектов (Патент №2223545 Россия, кл. G06K 9/62). Изобретение относится к устройствам вычислительной техники и может быть использовано для распознавания объектов в случае, когда их эталонные и наблюдаемые двухмерные изображения заданы в виде нечетких множеств. Техническим результатом является возможность устройства принимать решения о соответствии изображения наблюдаемого объекта эталонному с использованием нечеткой информации по результатам сравнения совокупности соседних элементов, т.е. по более информативному признаку. Технический результат достигается за счет того, что устройство для распознавания объектов содержит блок формирования координат, блок формирования функций принадлежности эталонного изображения объекта, блок формирования модулей разностей функций принадлежности, три блока формирования минимума, блок вычитания, два последовательных сумматора, два регистра, блок формирования показателя степени достоверности, блок формирования функций принадлежности наблюдаемого изображения объекта, блок преобразования функций принадлежности эталонного изображения объекта, блок преобразования функций принадлежности наблюдаемого изображения объекта.
Наиболее близким к предлагаемому является устройство для распознавания объектов (Патент №2246762 Россия, кл. G06K 9/68). Изобретение относится к области устройств вычислительной техники и может быть использовано для распознавания объектов, когда эталонные и наблюдаемые двумерные изображения заданы в виде нечетких множеств. Техническим результатом является расширение функциональных возможностей устройства за счет обеспечения распознавания требуемого объекта в группе объектов или при пространственном положении наблюдаемого объекта. Указанный результат достигается за счет того, что устройство содержит блок формирования координат, блок формирования функций принадлежности эталонного изображения объекта, блок формирования модулей разностей функции принадлежности, три блока формирования минимума, блок вычитания, два последовательных сумматора, два регистра, блок формирования показателя степени достоверности, блок формирования функций принадлежности наблюдаемого изображения объекта, блок памяти, блок выделения признака объекта, входы которого соединены с выходами блока памяти, регистр признака объекта и дешифратор.
Недостатком этого устройства является отсутствие инвариантности к аффинным преобразованиям и освещению объекта и, следовательно, низкая точность распознавания.
Технической задачей устройства является повышение точности распознавания изображения и обеспечение инвариантности к аффинным преобразованиям поворота и масштабирования.
Техническая задача решается тем, что в качестве эталона хранится не ряд плоских проекций, которые содержат различные ракурсы объекта, а его трехмерное представление в векторном виде. При распознавании трехмерный образ поворачивается, каждый раз генерируется ряд плоских изображений, пока не удастся найти совпадение. При решении данной задачи путем непосредственного перебора всех вариантов затраты машинного времени велики, поэтому для предварительной обработки используется ряд параметров объекта, класс, к которому относится данный объект, габаритные размеры.
Сущность изобретения поясняется чертежом, где представлена структурная схема устройства распознавания изображения, использующего векторные эталонные изображения.
Устройство для распознавания изображений объектов содержит блок ввода изображения (БВИ) 1, блок, обрабатывающий входное изображение (БОВИ) 2, который выделяет габаритный контейнер, просчитывает необходимые коэффициенты, блок анализа изображения и последующего кодирования (БАИиК) 3, блок, подсчитывающий разность в цвете пикселей в градациях серого исходного и эталонного изображений (БПРЦ) 4, персептронный блок (ПБ) 5, реализующий персептрон, используемый для распознавания изображения, блок сохранения параметров идентифицированного объекта (БСП) 6, блок, извлекающий данные из запоминающего устройства и производящий сравнение параметров (ИЗБиСП) 7, блок для просчета проекции (БПП) 8, выполняющий расчет проекции трехмерной векторной модели изображения эталонного объекта, генератор весов для персептрона (ГВП) 9, стек для накопления полученных изображений (СПИ) 10, запоминающее устройство с параметрами имеющихся эталонов (ЗУПЭ) 11, блок для преобразования векторного изображения (БПВИ) 12, выполняющий поворот и масштабирование векторного трехмерного объекта, блок, выбирающий трехмерный эталон по переданным параметрам и сохраняющий необходимые данные (БВЭиСД) 13, блок, пересылающий параметры "похожих" изображений (БПППИ) 14 в блок, выбирающий трехмерный эталон по переданным параметрам и сохраняющий необходимые данные (БВЭиСД), запоминающее устройство с эталонными изображениями в векторном формате (ЗУЭВИ) 15, устройство для коммуникации с ЭВМ (УКЭВМ) 16, причем выход блока ввода изображения (БВИ) является входом блока обрабатывающего входное изображение (БОВИ); первый выход блока, обрабатывающего входное изображение (БОВИ), является входом блока анализа изображения и последующего кодирования (БАИиК), а второй выход блока, обрабатывающего входное изображение (БОВИ), подсоединен к первому входу блока, подсчитывающего разность в цвете (БПРЦ); в свою очередь выход блока анализа изображения и последующего кодирования (БАИиК) соединен со входом блока, извлекающего данные из запоминающего устройства и производящего сравнение параметров (ИЗБиСП); выход блока, извлекающего данные из запоминающего устройства и производящего сравнение параметров (ИЗБиСП), соединен со входом запоминающего устройства, хранящего параметры имеющихся эталонов (ЗУПЭ); выход запоминающего устройства, хранящего параметры имеющихся эталонов (ЗУПЭ), соединен с первым входом запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ); первый выход запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ) является входом блока для преобразования векторного изображения (БПВИ), второй выход запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ) соединен с первым входом блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД); выход блока для преобразования векторного изображения (БПВИ) является входом блока для просчета проекции (БПП); первый выход блока для просчета проекции (БПП) соединен с вторым входом блока, подсчитывающего разность в цвете (БПРЦ), второй выход блока для просчета проекции (БПП) соединен с входом генератора весов персептрона (ГВП), а третий выход блока для просчета проекции (БПП) соединен с вторым входом блока, пересылающего параметры "похожих" изображений (БПППИ); выход блока, подсчитывающего разность в цвете (БПРЦ), является первым входом персептронного блока (ПБ); выход генератора весов персептрона (ГВП) соединен с вторым входом персептронного блока (ПБ); а выход персептронного блока (ПБ) является входом блока сохранения параметров (БСП); выход блока сохранения параметров (БСП) соединен со входом стека для накопления полученных изображений (СПИ); выход стека для накопления полученных изображений (СПИ) является первым входом блока, пересылающего параметры "похожих" изображений (БПППИ); выход блока, пересылающего параметры "похожих" изображений (БПППИ) является вторым входом блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД); первый выход блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД), подсоединен к второму входу запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ); второй выход блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД), является входом устройства для коммуникации с ЭВМ (УКЭВМ); устройство для коммуникации с ЭВМ (УКЭВМ) имеет порт сопряжения с ЭВМ.
Устройство работает следующим образом.
Входное изображение подается на блок ввода изображения (БВИ), который преобразует палитру изображения к градациям серого и передает полученные данные в блок, обрабатывающий входное изображение (БОВИ). Блок, обрабатывающий входное изображение (БОВИ), выделяет габаритный контейнер и просчитывает ряд коэффициентов: общее количество пикселей, отличных от цвета фона, соотношение сторон габаритного контейнера. После этого посредством блока анализа изображения и последующего кодирования (БАИиК) осуществляется кодирование изображения: разделение на 25 зон (5×5), в каждой из которых вычисляется количество пикселей, отличных от фона», если значение больше заданного порога, то зоне присваивается код «1», иначе «0». Получившаяся последовательность представляет собой двоичный код изображения. Далее блок, извлекающий данные из запоминающего устройства и производящий сравнение параметров (ИЗБиСП), извлекает из запоминающего устройства, содержащего параметры имеющихся эталонов (ЗУПЭ), хранящиеся там параметры имеющихся эталонов и сравнивает с данными, полученными в результате анализа блоком анализа изображения и последующего кодирования (БАИиК) и блока, обрабатывающего входное изображение (БОВИ). Если найдено соответствие, то из запоминающего устройства, содержащего эталонные изображения в векторном формате (ЗУЭВИ 15), извлекается соответствующая векторная модель эталонного объекта. Блок для преобразования векторного изображения (БПВИ) выполняет необходимые преобразования: поворот, масштабирование и передает данные в блок для просчета проекции (БПП), который преобразует векторное изображение в соответствующую плоскую проекцию: карты байтов, используя в качестве палитры градации серого со значениями в диапазоне от 0 до 256. На основе полученных из блока для просчета проекции (БПП) данных генератор весов персептрона (ГВП) генерирует веса для персептроного блока (ПБ). В качестве веса используется отношение количества пикселей, отличных от фона в заданной зоне, к общему количеству пикселей, изображения отличных от фона. Далее посредством блока, пересылающего параметры "похожих" изображений (БПППИ), выполняется попиксельно сравнение исходного изображения и проекции эталона. Сравнение производится в соответствии с заданным пороговым значением. В качестве входных данных для персептронного блока (ПБ) используется количество «схожих» пикселей зоны. Персептрон в персептронном блоке (ПБ) имеет 25 входов, соответственно изображение делится на 25 частей (5Х5), как упоминалось выше, и необходимые параметры вычисляются для каждой зоны. Решающий элемент персетронного блока (ПБ), реализующий пороговую либо сигмовидную функцию, определяет идентифицировано изображение или нет. Параметры всех идентифицированных изображений заносятся в стек для накопления полученных изображений (СПИ), откуда впоследствии извлекаются блоком, выбирающим трехмерный эталон» по переданным параметрам и сохраняющим необходимые данные (БВЭиСД), для передачи в устройство для коммуникации с ЭВМ (УКЭВМ), которое реализует интерфейс обмена данными с ЭВМ. Блок, выбирающий трехмерный эталон по переданным параметрам и сохраняющий необходимые данные (БВЭиСД), посредством запоминающего устройства, содержащего эталонные изображения в векторном формате (ЗУЭВИ), блока для преобразования векторного изображения (БПВИ) и блока для просчета проекции (БПП) может также передать в ЭВМ соответствующее векторное изображение либо проекцию идентифицированного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| Способ автоматического распознавания сцен и объектов на изображении | 2021 |
|
RU2778906C1 |
| УСТРОЙСТВО ПОИСКА ДУБЛИКАТОВ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2538319C1 |
| Система определения геометрических параметров трехмерных объектов | 2017 |
|
RU2650857C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2016 |
|
RU2664411C2 |
| Способ автоматической классификации рентгеновских изображений с использованием масок прозрачности | 2019 |
|
RU2716914C1 |
| Способ распознавания цифровых образов протезными системами | 2021 |
|
RU2773618C1 |
| СПОСОБ И СИСТЕМА ПОИСКА ГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2022 |
|
RU2807639C1 |
| АВТОМАТИЗИРОВАННЫЕ СПОСОБЫ И СИСТЕМЫ ВЫЯВЛЕНИЯ НА ИЗОБРАЖЕНИЯХ, СОДЕРЖАЩИХ ДОКУМЕНТЫ, ФРАГМЕНТОВ ИЗОБРАЖЕНИЙ ДЛЯ ОБЛЕГЧЕНИЯ ИЗВЛЕЧЕНИЯ ИНФОРМАЦИИ ИЗ ВЫЯВЛЕННЫХ СОДЕРЖАЩИХ ДОКУМЕНТЫ ФРАГМЕНТОВ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2647670C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
Изобретение относится к вычислительной технике и может быть использовано в системах технического зрения для идентификации объектов на изображении. Техническим результатом устройства является повышение точности распознавания изображения и обеспечение инвариантности к аффинным преобразованиям поворота и масштабирования. Этот результат достигается тем, что в качестве эталона хранится не ряд плоских проекций, которые содержат различные ракурсы объекта, а его трехмерное представление в векторном виде. При распознавании трехмерный образ поворачивается, каждый раз генерируется ряд плоских изображений, пока не удастся найти совпадение. При решении данной задачи путем непосредственного перебора всех вариантов затраты машинного времени велики, поэтому для предварительной обработки используется ряд параметров объекта, класс, к которому относится данный объект, габаритные размеры. Этот набор параметров определяют для каждой модели с учетом сложности ее формы. На вход распознавателя подают изображение, представленное массивом пикселей в градациях серого, то есть каждый элемент массива имеет значение от 0 до 255. Размерность массива зависит от параметров дискретизации изображения. 2 н.п. ф-лы, 1 ил.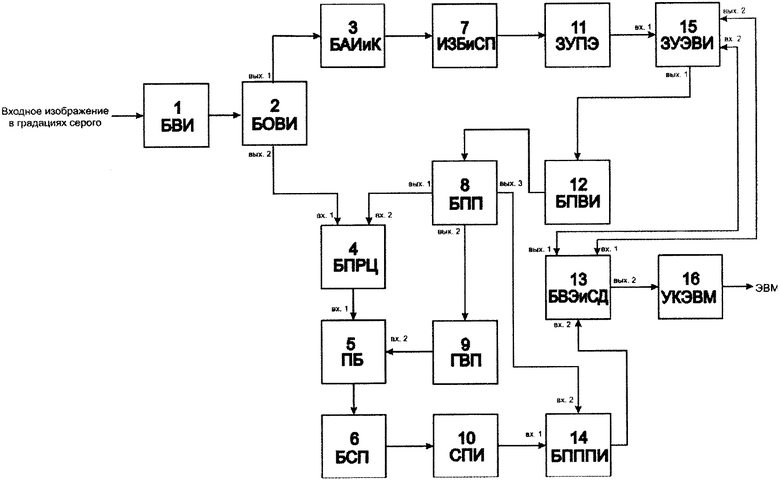
1. Способ компьютерного распознавания объектов, программа которого предусматривает предварительное приведение изображения объекта, вводимого в компьютер, к нормальному, стандартному для данного способа видоизменения масштаба, поворот в требуемое положение, центрирование, вписание в прямоугольник требуемого размера, преобразование изображения объекта в изображение, выполненное в градациях - различных степенях яркости одного цвета, на которое последовательно, поочередно накладываются изображения хранящихся в памяти компьютера шаблонов, отличающийся тем, что эталонное изображение хранят в виде векторной трехмерной модели, для каждой такой модели фиксируют набор параметров для аффинных преобразований: углы поворота по осям х, у, z, масштаб; этот набор параметров определяют для каждой модели с учетом сложности ее формы с тем, чтобы наиболее точно произвести идентификацию; производят следующую последовательность действий: получают векторную трехмерную модель эталонного объекта путем геометрического построения, затем, изменяя ее положение в пространстве (поворот, отражение, масштабирование), получают ряд вышеуказанных параметров, которые сохраняют и используют в дальнейшем при распознавании для воссоздания соответствующего ракурса эталона объекта; плоское изображение представляют в виде двумерного массива, элементами которого являются значения от 0 до 255 - градации серого цвета; помимо указанных параметров в набор включают дополнительно соотношение сторон габаритного изображения контейнера объекта и кодированное представление объекта, которое позволяет определить его положение внутри габаритного контейнера, кодирование производят разбиением габаритного контейнера на 25 одинаковых областей и определением наличия части объекта в каждой из них, таким образом получают 25-битный код данного ракурса объекта в двоичном виде: если часть изображения объекта находится в области, то ее помечают единицей; иначе нулем, код получают перебором значений меток в областях слева направо, сверху вниз, на вход распознавателя подают изображение, представленное массивом пикселей в градациях серого, то есть каждый элемент массива имеет значение от 0 до 255, размерность массива зависит от параметров дискретизации изображения, распознавание производят следующим образом: определяют габаритный контейнер входного изображения объекта, затем кодируют вышеуказанным способом, исходя из отношения сторон габаритного контейнера и полученного кода, выбирают набор параметров из базы эталонов, затем выполняют преобразование векторной модели эталонного объекта соответственно установленным ранее параметрам: поворот и масштабирование, после чего строят плоское изображение модели эталона, которое сравнивают с поданным на вход изображением посредством нейросети персептрон, сравнение производят путем анализа градаций серого для каждой дискретной области изображения, причем производят попиксельное сравнение, затем находят модуль разности для каждой пары пикселей изображения, поданного на вход распознавателя и полученной проекции векторной модели эталонного объекта, и сравнивают его с пороговым значением, полученные данные подают на вход нейросети персептрон, в зависимости от значения функции активации которой принимают решение о схожести проекции векторной модели эталонного объекта и входного изображений.
2. Устройство для распознавания изображений объектов, отличающееся тем, что содержит блок ввода изображения (БВИ), блок, обрабатывающий входное изображение (БОВИ), выделяет габаритный контейнер, просчитывает необходимые коэффициенты, блок анализа изображения и последующего кодирования (БАИиК), блок, подсчитывающий разность в цвете пикселей в градациях серого (БПРЦ) исходного и эталонного изображений, персептронный блок (ПБ), реализующий персептрон, используемый для распознавания изображения, блок сохранения параметров (БСП) идентифицированного объекта, блок, извлекающий данные из запоминающего устройства и производящий сравнение параметров (ИЗБиСП), блок, выполняющий просчет 3D изображения и получения плоской проекции, блок для просчета проекции (БПП), генератор весов для персептрона (ГВП), стек для накопления полученных изображений (СПИ), запоминающее устройство с параметрами имеющихся эталонов (ЗУПЭ), блок для преобразования векторного изображения (БПВИ): поворот, масштаб, блок, выбирающий трехмерный эталон по переданным параметрам и сохраняющий необходимые данные (БВЭиСД), блок, пересылающий параметры "похожих" изображений (БПППИ) в блок, выбирающий трехмерный эталон по переданным параметрам и сохраняющий необходимые данные (БВЭиСД), запоминающее устройство с эталонными изображениями в векторном формате (ЗУЭВИ), устройство для коммуникации с ЭВМ (УКЭВМ), причем выход блока ввода изображения (БВИ) является входом блока, обрабатывающего входное изображение (БОВИ); первый выход блока, обрабатывающего входное изображение (БОВИ), является входом блока анализа изображения и последующего кодирования (БАИиК), а второй выход блока, обрабатывающего входное изображение (БОВИ), подсоединен к первому входу блока, подсчитывающего разность в цвете (БПРЦ); в свою очередь выход блока анализа изображения и последующего кодирования (БАИиК) соединен со входом блока, извлекающего данные из запоминающего устройства и производящего сравнение параметров (ИЗБиСП); выход блока, извлекающего данные из запоминающего устройства и производящего сравнение параметров (ИЗБиСП), соединен со входом запоминающего устройства, хранящего параметры имеющихся эталонов (ЗУПЭ); выход запоминающего устройства, хранящего параметры имеющихся эталонов, (ЗУПЭ) соединен с первым входом запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ); первый выход запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ) является входом блока для преобразования векторного изображения (БПВИ), второй выход запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ) соединен с первым входом блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД); выход блока для преобразования векторного изображения (БГТВИ) является входом блока для просчета проекции (БПП); первый выход блока для просчета проекции (БПП) соединен с вторым входом блока, подсчитывающего разность в цвете (БПРЦ), второй выход блока для просчета проекции (БПП) соединен с входом генератора весов персептрона (ГВП), а третий выход блока для просчета проекции (БПП) соединен с вторым входом блока, пересылающего параметры "похожих" изображений (БПППИ); выход блока, подсчитывающего разность в цвете (БПРЦ), является первым входом персептронного блока (ПБ); выход генератора весов персептрона (ГВП) соединен с вторым входом персептронного блока (ПБ); а выход персептронного блока (ПБ) является входом блока сохранения параметров (БСП); выход блока сохранения параметров (БСП) соединен со входом стека для накопления полученных изображений (СПИ); выход стека для накопления полученных изображений (СПИ) является первым входом блока, пересылающего параметры "похожих" изображений (БПППИ); выход блока, пересылающего параметры "похожих" изображений, (БПППИ) является вторым входом блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД); первый выход блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД), подсоединен к второму входу запоминающего устройства с эталонными изображениями в векторном формате (ЗУЭВИ); второй выход блока, выбирающего трехмерный эталон по переданным параметрам и сохраняющего необходимые данные (БВЭиСД), является входом устройства для коммуникации с ЭВМ (УКЭВМ); устройство для коммуникации с ЭВМ (УКЭВМ) имеет порт сопряжения с ЭВМ.
| СПОСОБ КОМПЬЮТЕРНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2002 |
|
RU2234127C2 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1995 |
|
RU2116671C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2267232C1 |
| СИСТЕМА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ, КОНТРОЛЛЕР И РАДИОЧАСТОТНАЯ ПОДСИТЕМА ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИ РЕГУЛИРУЕМЫМИ АНТЕННАМИ | 2010 |
|
RU2538294C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2003 |
|
RU2246762C1 |
| УСТРОЙСТВО ОБРАБОТКИ ДВУХМЕРНЫХ И ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2289161C1 |
| US 6047085 A, 04.04.2000. | |||

