Область техники
[0001] Настоящее изобретение относится, в общем, к области технологий сетевых коммуникаций, а именно к способу и устройству для управления самоуравновешивающимся транспортным средством.
Предпосылки создания изобретения
[0002] На существующем уровне техники самоуравновешивающиеся транспортные средства способны регистрировать изменение своего положения в пространстве при помощи встроенных гироскопа и датчика ускорения и могут соответствующим образом регулировать работу приводного двигателя, при помощи системы сервоуправления, с целью поддержания равновесия системы.
Сущность изобретения
[0003] С целью преодоления недостатков, имеющихся на существующем уровне техники, в вариантах осуществления настоящего изобретения предложены способ и устройство управления самоуравновешивающимся транспортным средством.
[0004] В соответствии с первым аспектом вариантов осуществления настоящего изобретения предложен способ управления самоуравновешивающимся транспортным средством с помощью мобильного терминала, включающий:
[0005] установление соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
[0006] получение информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению; и
[0007] управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[0008] Опционально, способ дополнительно включает:
[0009] обнаружение, присутствует ли событие регулировки скорости; и
[0010] когда обнаружено, что событие регулировки скорости присутствует, передачу принятого значения регулировки скорости в самоуравновешивающееся транспортное средство по упомянутому соединению.
[0011] Опционально, обнаружение, присутствует ли событие регулировки скорости, включает:
[0012] обнаружение, присутствует ли событие операции, представляющей собой регулировку величины скорости на приборной панели в интерфейсе управления; или
[0013] обнаружение, присутствует ли событие операции, представляющей собой регулировку панели управления скоростью в интерфейсе управления.
[0014] Опционально, установление соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth включает:
[0015] поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth; и
[0016] сопряжение Bluetooth-соединения с найденным самоуравновешивающимся транспортным средством в целях установления соединения.
[0017] Опционально, сопряжение Bluetooth-соединения с найденным самоуравновешивающимся транспортным средством в целях установления соединения, включает:
[0018] когда количество найденных самоуравновешивающихся транспортных средств превышает единицу, прием инструкции выбора, относящейся к самоуравновешивающемуся транспортному средству; и
[0019] соединение с самоуравновешивающимся транспортным средством, выбранным согласно инструкции выбора.
[0020] Опционально, получение информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению включает:
[0021] прием информации о состоянии движения самоуравновешивающегося транспортного средства, периодически передаваемой самоуравновешивающимся транспортным средством по упомянутому соединению; или
[0022] периодическую передачу инструкции запроса состояния в самоуравновешивающееся транспортное средство и прием информации о состоянии движения самоуравновешивающегося транспортного средства, возвращенной самоуравновешивающимся транспортным средством согласно инструкции запроса состояния.
[0023] Опционально, управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства включает:
[0024] отображение информации о состоянии движения в интерфейсе управления; и/или
[0025] обнаружение информации о состоянии движения и выдачу предупреждения, когда информация о состоянии движения указывает на достижение соответствующего порогового состояния движения.
[0026] Опционально, отображение информации о состоянии движения в интерфейсе управления включает:
[0027] отображение скорости движения самоуравновешивающегося транспортного средства в интерфейсе управления; и/или
[0028] отображение оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства в интерфейсе управления; и/или
[0029] отображение температуры корпуса самоуравновешивающегося транспортного средства в интерфейсе управления.
[0030] Опционально, отображение информации о состоянии движения в интерфейсе управления дополнительно включает:
[0031] когда информация о состоянии движения содержит данные об оставшейся энергии аккумулятора, вычисление оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора; и
[0032] отображение оставшейся дальности продолжения поездки в интерфейсе управления.
[0033] Опционально, выдача предупреждения, когда информация о состоянии движения указывает на достижение соответствующего порогового состояния движения, включает:
[0034] выдачу предупреждения, когда оставшаяся энергия аккумулятора самоуравновешивающегося транспортного средства меньше пороговой энергии аккумулятора; и/или
[0035] выдачу предупреждения, когда скорость движения самоуравновешивающегося транспортного средства выше, чем пороговая скорость; и/или
[0036] выдачу предупреждения, когда температура корпуса самоуравновешивающегося транспортного средства выше, чем пороговая температура.
[0037] Опционально, способ дополнительно включает:
[0038] определение, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки; и
[0039] когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, сброс состояния блокировки самоуравновешивающегося транспортного средства.
[0040] Опционально, сброс состояния блокировки самоуравновешивающегося транспортного средства включает:
[0041] когда обнаружена операция, инициирующая сброс блокировки, передачу инструкции разблокировки в самоуравновешивающееся транспортное средство по упомянутому соединению, в результате чего самоуравновешивающееся транспортное средство сбрасывает состояние блокировки согласно принятой инструкции разблокировки.
[0042] Опционально, способ дополнительно включает:
[0043] когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, передачу запроса на получение оставшейся энергии аккумулятора в самоуравновешивающееся транспортное средство;
[0044] прием оставшейся энергии аккумулятора, возвращенной самоуравновешивающимся транспортным средством; и
[0045] отображение оставшейся энергии аккумулятора в экранном интерфейсе блокировки.
[0046] Опционально, способ дополнительно включает:
[0047] вычисление оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора и отображение оставшейся дальности продолжения поездки в экранном интерфейсе блокировки.
[0048] Опционально, вычисление оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора включает:
[0049] получение оставшейся энергии аккумулятора при помощи умножения оставшейся энергии аккумулятора на реконфигурируемый коэффициент корреляции.
[0050] Опционально, способ дополнительно включает:
[0051] обнаружение, присутствует ли событие назначения цвета световой сигнализации для самоуравновешивающегося транспортного средства;
[0052] когда обнаружено событие назначения цвета световой сигнализации, прием значения цвета световой сигнализации, выбранного пользователем; и
[0053] передачу инструкции регулировки цвета, в которой содержится выбранное значение цвета световой сигнализации, в самоуравновешивающееся транспортное средство по упомянутому соединению.
[0054] Опционально, способ дополнительно включает:
[0055] обнаружение, присутствует ли событие, инициирующее режим камеры; и
[0056] когда обнаружено событие, инициирующее режим камеры, активацию режима камеры, и отображение изображения, захваченного камерой в качестве фона в интерфейсе управления.
[0057] Опционально, отображение изображения, захваченного камерой, в качестве фона в интерфейсе управления включает:
[0058] вставку изображения, захваченного камерой, ниже слоя интерфейса управления, предназначенного для взаимодействия с пользователем, в реальном времени.
[0059] Опционально, способ дополнительно включает:
[0060] в режиме камеры, когда обнаружена операция, инициирующая фотографирование, активацию в камере функции фотографирования.
[0061] Опционально, способ дополнительно включает:
[0062] обнаружение, принята ли операция поиска транспортного средства;
[0063] когда принята операция поиска транспортного средства, поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth, и сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством; и
[0064] когда происходит сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством, передачу инструкции поиска транспортного средства в самоуравновешивающееся транспортное средство, в результате чего самоуравновешивающееся транспортное средство выполняет уведомление о поиске транспортного средства.
[0065] Опционально, поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth и сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством дополнительно включает:
[0066] получение расстояния до самоуравновешивающегося транспортного средства по Bluetooth-соединению с самоуравновешивающимся транспортным средством; и
[0067] отображение расстояния до самоуравновешивающегося транспортного средства в интерфейсе управления.
[0068] Опционально, способ дополнительно включает:
[0069] обнаружение, присутствует ли событие, инициирующее движение с дистанционным управлением;
[0070] когда обнаружено, что присутствует событие, инициирующее движение с дистанционным управлением, активацию функции движения с дистанционным управлением и прием заданной информации о направлении движения и скорости движения, которая была введена; и
[0071] передачу заданной информации о направлении движения и скорости движения в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства.
[0072] Опционально, активация функции дистанционного управления движением и прием заданной информации о направлении движения и скорости движения, которая была введена, включает:
[0073] активацию функции дистанционного управления движением и обнаружение, присутствует ли событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства; и
[0074] когда обнаружено, что присутствует событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства, прием заданной информации о направлении движения и скорости движения, которая была введена.
[0075] Опционально, обнаружение, присутствует ли событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства, включает:
[0076] обнаружение, присутствует ли событие операции, представляющей собой регулировку угла направления приборной панели в интерфейсе управления и регулировку расстояния от центра приборной панели в интерфейсе управления.
[0077] Опционально, способ дополнительно включает:
[0078] обнаружение, присутствует ли операция ограничения скорости самоуравновешивающегося транспортного средства; и
[0079] когда обнаружена операция ограничения скорости самоуравновешивающегося транспортного средства, ограничение скорости движения в пределах диапазона ограничения скорости.
[0080] Опционально, обнаружение, присутствует ли операция ограничения скорости самоуравновешивающегося транспортного средства, включает:
[0081] обнаружение, присутствует ли назначение максимальной скорости движения для панели управления скоростью в интерфейсе дистанционного управления движением.
[0082] Опционально, способ дополнительно включает:
[0083] обнаружение, принята ли операция, инициирующая навигацию; и
[0084] если принята операция, инициирующая навигацию, вызов функции карты для получения и отображения информации навигации в реальном времени.
[0085] Опционально, вызов функции карты для получения и отображения информации навигации в реальном времени включает:
[0086] активацию функции карты и переключение на интерфейс навигации с целью получения и отображения текущего местоположения, а также данных навигации в реальном времени.
[0087] Опционально, способ дополнительно включает:
[0088] обнаружение, принята ли операция, инициирующая компас;
[0089] если обнаружена операция, инициирующая компас, получение направления, указываемого компасом системы; и
[0090] отображение направления, указываемого компасом системы, в интерфейсе управления в реальном времени.
[0091] Опционально, способ дополнительно включает:
[0092] обнаружение, принята ли операция, инициирующая удаленное обновление;
[0093] если принята операция, инициирующая удаленное обновление, передачу инструкции обновления в самоуравновешивающееся транспортное средство по упомянутому соединению; и
[0094] прием результата обновления, возвращенного самоуравновешивающимся транспортным средством, и отображение результата обновления в интерфейсе управления.
[0095] Опционально, способ дополнительно включает:
[0096] обнаружение, присутствует ли операция, инициирующая пользовательское взаимодействие; и
[0097] если обнаружено, что имеет место операция, инициирующая пользовательское взаимодействие, установление соединения с сервером с целью передачи или приема информации взаимодействия.
[0098] Опционально, способ дополнительно включает:
[0099] передачу на сервер запроса о пользователях множества самоуравновешивающихся транспортных средств с целью получения сетевых данных;
[00100] прием статистических результатов, полученных сервером, согласно запросу на получение; и
[00101] отображение и анализ статистических результатов.
[00102] В соответствии со вторым аспектом вариантов осуществления настоящего изобретения предложено устройство управления самоуравновешивающимся транспортным средством, включающее:
[00103] модуль соединения, сконфигурированный для установления соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
[00104] модуль получения, сконфигурированный для получения информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению; и
[00105] модуль управления, сконфигурированный для управления самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[00106] Опционально, устройство дополнительно включает:
[00107] модуль определения скорости, сконфигурированный для обнаружения, присутствует ли событие регулировки скорости; и
[00108] модуль передачи скорости, сконфигурированный, когда обнаружено, что событие регулировки скорости присутствует, для передачи принятого значения регулировки скорости в самоуравновешивающееся транспортное средство по упомянутому соединению.
[00109] Опционально, модуль определения скорости включает: первый подмодуль определения скорости или второй подмодуль определения скорости; при этом
[00110] первый подмодуль определения скорости сконфигурирован для обнаружения, присутствует ли событие операции, представляющей собой регулировку величины скорости на приборной панели в интерфейсе управления; и
[00111] второй подмодуль определения скорости сконфигурирован для обнаружения, присутствует ли событие операции, представляющей собой регулировку панели управления скоростью в интерфейсе управления; и
[00112] Опционально, модуль соединения включает:
[00113] подмодуль поиска, сконфигурированный для поиска самоуравновешивающегося транспортного средства по протоколу Bluetooth; и
[00114] первый подмодуль соединения, сконфигурированный для сопряжения Bluetooth-соединения с найденным самоуравновешивающимся транспортным средством, с целью установления соединения.
[00115] Опционально, первый подмодуль соединения дополнительно включает:
[00116] подмодуль приема, сконфигурированный, когда количество найденных самоуравновешивающихся транспортных средств превышает единицу, для приема инструкции выбора, относящейся к самоуравновешивающемуся транспортному средству; и
[00117] второй модуль соединения, сконфигурированный для соединения с самоуравновешивающимся транспортным средством, выбранным согласно инструкции выбора.
[00118] Опционально, модуль получения включает: первый подмодуль получения или второй подмодуль получения; при этом
[00119] первый подмодуль получения сконфигурирован для приема информации о состоянии движения самоуравновешивающегося транспортного средства, периодически передаваемой самоуравновешивающимся транспортным средством по упомянутому соединению; и
[00120] второй подмодуль получения сконфигурирован для периодической передачи инструкции запроса состояния в самоуравновешивающееся транспортное средство и приема информации о состоянии движения самоуравновешивающегося транспортного средства, возвращенной самоуравновешивающимся транспортным средством согласно инструкции запроса состояния.
[00121] Опционально, модуль управления включает: подмодуль отображения состояния движения и/или подмодуль определения состояния движения; при этом
[00122] подмодуль отображения состояния движения сконфигурирован для отображения информации о состоянии движения в интерфейсе управления; и
[00123] подмодуль определения состояния движения сконфигурирован для обнаружения информации о состоянии движения и для выдачи предупреждения, когда информация о состоянии движения указывает на достижение соответствующего порогового состояния движения.
[00124] Опционально, подмодуль отображения состояния движения включает: первый подмодуль отображения; и/или второй подмодуль отображения; и/или третий подмодуль отображения, при этом
[00125] первый подмодуль отображения сконфигурирован для отображения скорости движения самоуравновешивающегося транспортного средства в интерфейсе управления;
[00126] второй подмодуль отображения сконфигурирован для отображения оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства в интерфейсе управления;
[00127] третий подмодуль отображения сконфигурирован для отображения температуры корпуса самоуравновешивающегося транспортного средства в интерфейсе управления;
[00128] Опционально, устройство дополнительно включает:
[00129] модуль вычисления дальности продолжения поездки, сконфигурированный, когда информация о состоянии движения содержит данные об оставшейся энергии аккумулятора, для вычисления оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора; и
[00130] первый модуль отображения дальности продолжения поездки, сконфигурированный для отображения оставшейся дальности продолжения поездки в интерфейсе управления.
[00131] Опционально, подмодуль определения состояния движения включает: первый подмодуль предупреждения; и/или второй подмодуль предупреждения; и/или третий подмодуль предупреждения, при этом
[00132] первый подмодуль предупреждения сконфигурирован для выдачи предупреждения, когда оставшаяся энергия аккумулятора самоуравновешивающегося транспортного средства меньше пороговой энергии аккумулятора; и
[00133] второй подмодуль предупреждения сконфигурирован для выдачи предупреждения, когда скорость движения самоуравновешивающегося транспортного средства выше, чем пороговая скорость; и
[00134] третий подмодуль предупреждения сконфигурирован для выдачи предупреждения, когда температура корпуса самоуравновешивающегося транспортного средства выше, чем пороговая температура.
[00135] Опционально, устройство дополнительно включает:
[00136] модуль определения состояния блокировки, сконфигурированный для определения, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки; и
[00137] модуль сброса состояния блокировки, сконфигурированный, когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, для сброса состояния блокировки самоуравновешивающегося транспортного средства.
[00138] Опционально, модуль сброса состояния блокировки включает:
[00139] подмодуль инструкции разблокировки, сконфигурированный, когда обнаружена операция, инициирующая сброс блокировки, для передачи инструкции разблокировки в самоуравновешивающееся транспортное средство по упомянутому соединению, в результате чего самоуравновешивающееся транспортное средство сбрасывает состояние блокировки согласно принятой инструкции разблокировки.
[00140] Опционально, устройство дополнительно включает:
[00141] модуль запроса информации об энергии аккумулятора, сконфигурированный, когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, для передачи запроса на получение оставшейся энергии аккумулятора в самоуравновешивающееся транспортное средство;
[00142] модуль приема информации об энергии аккумулятора, сконфигурированный для приема информации об оставшейся энергии аккумулятора, возвращенной самоуравновешивающимся транспортным средством; и
[00143] модуль отображения информации об энергии аккумулятора, сконфигурированный для отображения информации об оставшейся энергии аккумулятора в экранном интерфейсе блокировки.
[00144] Опционально, устройство дополнительно включает:
[00145] модуль вычисления дальности продолжения поездки, сконфигурированный для вычисления оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора; и
[00146] второй модуль отображения дальности продолжения поездки, сконфигурированный для отображения оставшейся дальности продолжения поездки в экранном интерфейсе блокировки.
[00147] Опционально, модуль вычисления дальности продолжения поездки включает:
[00148] подмодуль вычисления дальности продолжения поездки, сконфигурированный для получения оставшейся дальности продолжения поездки при помощи умножения оставшейся энергии аккумулятора на реконфигурируемый коэффициент корреляции.
[00149] Опционально, устройство дополнительно включает:
[00150] модуль определения цвета световой сигнализации, сконфигурированный для обнаружения, присутствует ли событие назначения цвета световой сигнализации для самоуравновешивающегося транспортного средства;
[00151] модуль приема цвета световой сигнализации, сконфигурированный, когда обнаружено событие назначения цвета световой сигнализации, для приема значения цвета световой сигнализации, выбранного пользователем; и
[00152] модуль передачи цвета световой сигнализации, сконфигурированный для передачи инструкции регулировки цвета, в которой содержится выбранное значение цвета световой сигнализации, в самоуравновешивающееся транспортное средство по упомянутому соединению.
[00153] Опционально, устройство дополнительно включает:
[00154] модуль обнаружения камеры, сконфигурированный для обнаружения, присутствует ли событие, инициирующее режим камеры; и [00155] модуль обработки данных камеры, сконфигурированный, когда обнаружено событие, инициирующее режим камеры, для активации режима камеры и для отображения изображения, захваченного камерой, в качестве фона в интерфейсе управления.
[00156] Опционально, модуль обработки данных камеры включает:
[00157] подмодуль вставки, сконфигурированный для вставки изображения, захваченного камерой, ниже слоя интерфейса управления, предназначенного для взаимодействия с пользователем, в реальном времени.
[00158] Опционально, устройство дополнительно включает:
[00159] модуль фотографирования, сконфигурированный, в режиме камеры, когда обнаружена операция, инициирующая фотографирование, для активации в камере функции фотографирования.
[00160] Опционально, устройство дополнительно включает:
[00161] модуль обнаружения поиска транспортного средства, сконфигурированный для обнаружения, была ли принята операция поиска транспортного средства;
[00162] модуль Bluetooth-сопряжения, сконфигурированный, когда была принята операция поиска транспортного средства, для поиска самоуравновешивающегося транспортного средства по протоколу Bluetooth, и для сопряжения Bluetooth-соединения с самоуравновешивающимся транспортным средством; и
[00163] модуль инструкции поиска транспортного средства, сконфигурированный, когда происходит сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством, для передачи инструкции поиска транспортного средства в самоуравновешивающееся транспортное средство, в результате чего самоуравновешивающееся транспортное средство выполняет уведомление о поиске транспортного средства.
[00164] Опционально, устройство дополнительно включает:
[00165] модуль получения расстояния, сконфигурированный для получения расстояния до самоуравновешивающегося транспортного средства по Bluetooth-соединению с самоуравновешивающимся транспортным средством; и
[00166] модуль отображения расстояния, сконфигурированный для отображения расстояния до самоуравновешивающегося транспортного средства в интерфейсе управления.
[00167] Опционально, устройство дополнительно включает:
[00168] модуль обнаружения дистанционного управления, сконфигурированный для обнаружения, присутствует ли событие, инициирующее движение с дистанционным управлением;
[00169] модуль обработки данных дистанционного управления, сконфигурированный, когда обнаружено, что присутствует событие, инициирующее движение с дистанционным управлением, для активации функции движения с дистанционным управлением и для приема заданной информации о направлении движения и скорости движения, которая была введена; и
[00170] модуль передачи информации дистанционного управления, сконфигурированный для передачи заданной информации о направлении движения и скорости движения в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства.
[00171] Опционально, модуль обработки данных дистанционного управления включает:
[00172] первый подмодуль обнаружения, сконфигурированный для активации функции дистанционного управления движением и для обнаружения, присутствует ли событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства; и
[00173] подмодуль приема, сконфигурированный, когда обнаружено, что присутствует событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства, для приема заданной информации о направлении движения и скорости движения, которая была введена.
[00174] Опционально, первый подмодуль обнаружения включает:
[00175] второй подмодуль обнаружения, сконфигурированный для обнаружения, присутствует ли событие операции, представляющей собой регулировку угла направления на приборной панели в интерфейсе управления и регулировку расстояния от центра приборной панели в интерфейсе управления.
[00176] Опционально, устройство дополнительно включает:
[00177] модуль обнаружения ограничения скорости, сконфигурированный для обнаружения, присутствует ли операция ограничения скорости самоуравновешивающегося транспортного средства; и
[00178] модуль обработки данных ограничения скорости, сконфигурированный, когда обнаружена операция ограничения скорости самоуравновешивающегося транспортного средства, для ограничения скорости движения в пределах диапазона ограничения скорости.
[00179] Опционально, модуль обнаружения ограничения скорости включает:
[00180] подмодуль обнаружения ограничения скорости, сконфигурированный для обнаружения, присутствует ли назначение максимальной скорости движения для панели управления скоростью в интерфейсе дистанционного управления движением.
[00181] Опционально, устройство дополнительно включает:
[00182] модуль обнаружения навигации, сконфигурированный для обнаружения, была ли принята операция, инициирующая навигацию; и
[00183] модуль обработки данных навигации, сконфигурированный, если принята операция, инициирующая навигацию, для вызова функции карты с целью получения и отображения информации навигации в реальном времени.
[00184] Опционально, модуль обработки данных навигации включает:
[00185] подмодуль обработки данных навигации, сконфигурированный для активации функции карты и для переключения на интерфейс навигации с целью получения и отображения текущего местоположения, а также данных навигации в реальном времени.
[00186] Опционально, устройство дополнительно включает:
[00187] модуль обнаружения компаса, сконфигурированный для обнаружения, была ли принята операция, инициирующая компас; и
[00188] модуль получения направления компаса, сконфигурированный, если обнаружена операция, инициирующая компас, для получения направления, указываемого компасом системы; и
[00189] модуль отображения направления компаса, сконфигурированный для отображения направления, указываемого компасом системы, в интерфейсе управления в реальном времени.
[00190] Опционально, устройство дополнительно включает:
[00191] модуль обнаружения обновления, сконфигурированный для обнаружения, была ли принята операция, инициирующая удаленное обновление;
[00192] модуль передачи инструкции обновления, сконфигурированный, если была принята операция, инициирующая удаленное обновление, для передачи инструкции обновления в самоуравновешивающееся транспортное средство по упомянутому соединению; и
[00193] модуль обработки данных результата обновления, сконфигурированный для приема результата обновления, возвращенного самоуравновешивающимся транспортным средством, и для отображение результата обновления в интерфейсе управления.
[00194] Опционально, устройство дополнительно включает:
[00195] модуль обнаружения пользовательского взаимодействия, сконфигурированный для обнаружения, присутствует ли операция, инициирующая пользовательское взаимодействие; и
[00196] модуль обработки данных пользовательского взаимодействия, сконфигурированный, если обнаружено, что имеет место операция, инициирующая пользовательское взаимодействие, для установления соединения с сервером с целью передачи или приема информации взаимодействия.
[00197] Опционально, устройство дополнительно включает:
[00198] модуль запроса на получение данных, сконфигурированный для передачи на сервер запроса о пользователях множества самоуравновешивающихся транспортных средств с целью получения сетевых данных;
[00199] модуль приема статистических результатов, сконфигурированный для приема статистических результатов, полученных сервером, согласно запросу на получение; и
[00200] модуль отображения статистических результатов, сконфигурированный для отображения и анализа статистических результатов.
[00201] В соответствии с третьим аспектом вариантов осуществления настоящего изобретения предложено устройство управления самоуравновешивающимся транспортным средством, включающее:
[00202] процессор; и
[00203] память для хранения инструкций, исполняемых упомянутым процессором;
[00204] при этом процессор сконфигурирован для выполнения следующего:
[00205] установление соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
[00206] получение информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению; и
[00207] управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[00208] Техническая схема, соответствующая вариантам осуществления настоящего изобретения, позволяет получить следующие полезные результаты.
[00209] В соответствии с настоящим изобретением пользовательский терминал устанавливает соединение с самоуравновешивающимся транспортным средством по протоколу Bluetooth, получает информацию о состоянии движения самоуравновешивающегося транспортного средства по соединению Bluetooth; и управляет самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства. Таким образом, пользовательский терминал позволяет управлять состоянием движения самоуравновешивающегося транспортного средства по соединению Bluetooth. Благодаря этому не только повышается эффективность управления самоуравновешивающимся транспортным средством, но также обеспечивается удобство управления самоуравновешивающимся транспортным средством для пользователя, что позволяет улучшить пользовательское восприятие.
[00210] В настоящем изобретении пользовательский терминал может поддерживать регулировку скорости самоуравновешивающегося транспортного средства и передавать значение регулировки скорости, заданное пользователем, в самоуравновешивающееся транспортное средство по соединению Bluetooth, что дает пользователю возможность выполнять регулировку скорости самоуравновешивающегося транспортного средства и улучшает пользовательское восприятие.
[00211] В настоящем изобретении пользовательский терминал может выполнять поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth и устанавливать соединение Bluetooth с самоуравновешивающимся транспортным средством. А именно, пользовательский терминал может устанавливать соединение с самоуравновешивающимся транспортным средством, выбранным пользователем, что дает пользователю возможность сэкономить время на поиск самоуравновешивающегося транспортного средства и повышает эффективность поиска самоуравновешивающегося транспортного средства пользователем.
[00212] В настоящем изобретении, когда самоуравновешивающимся транспортным средством управляют при помощи пользовательского терминала, необходимо получение информации о состоянии движения самоуравновешивающегося транспортного средства. Информация о состоянии движения самоуравновешивающегося транспортного средства может быть получена методом пассивного приема или методом активного запроса, что позволяет повысить эффективность получения информации о состоянии движения самоуравновешивающегося транспортного средства пользовательским терминалом.
[00213] В настоящем изобретении пользовательский терминал отображает информацию о состоянии движения самоуравновешивающегося транспортного средства в интерфейсе управления, а также выполняет контроль информации о состоянии движения. Когда какие-либо данные в информации о состоянии движения указывают на достижение соответствующего порогового состояния движения, выдается предупреждение. Соответственно, пользователь может предпринимать соответствующие меры безопасности, связанные с самоуравновешивающимся транспортным средством, согласно различным предупреждениям пользовательского терминала, что позволяет повысить безопасность применения самоуравновешивающегося транспортного средства пользователем и улучшить пользовательское восприятие.
[00214] В настоящем изобретении, когда самоуравновешивающееся транспортное средство находится в состоянии блокировки, пользовательский терминал может также получать информацию об оставшейся энергии аккумулятора и оставшейся дальности продолжения поездки самоуравновешивающегося транспортного средства и отображать информацию об оставшейся энергии аккумулятора и оставшейся дальности продолжения поездки самоуравновешивающегося транспортного средства в экранном интерфейсе блокировки. Соответственно, пользователь имеет возможность определить, необходима ли подзарядка самоуравновешивающегося транспортного средства согласно оставшейся энергии аккумулятора и оставшейся дальности продолжения поездки самоуравновешивающегося транспортного средства в экранном интерфейсе блокировки. Это позволяет улучшить пользовательское восприятие, а также повысить безопасность применения самоуравновешивающегося транспортного средства.
[00215] В настоящем изобретении пользовательский терминал может поддерживать назначение пользователем цвета световой сигнализации и передавать инструкцию регулировки цвета, содержащую выбранное значение цвета световой сигнализации в самоуравновешивающееся транспортное средство по соединению Bluetooth. Это позволяет удовлетворить требования пользователей в отношении выбора цвета световой сигнализации, что позволяет улучшить пользовательское восприятие.
[00216] В настоящем изобретении пользовательский терминал может поддерживать назначение пользователем направления движения, при этом в интерфейсе управления доступны конкретные методы назначения. Благодаря этому пользователь может осуществлять назначения траектории движения самоуравновешивающегося транспортного средства при помощи взаимодействия с интерфейсом управления, что позволяет снизить сложность назначения направления движения пользователем и улучшить пользовательское восприятие.
[00217] В настоящем изобретении пользовательский терминал может поддерживать режим камеры, благодаря чему пользователь может получать информацию о ситуации в окружающем пространстве и осуществлять фотографирование во время управления самоуравновешивающимся транспортным средством. Таким образом, различные потребности пользователя могут быть удовлетворены в большей степени, и при этом также обеспечивается повышенная безопасность применения самоуравновешивающегося транспортного средства пользователем.
[00218] В настоящем изобретении интерфейс управления в пользовательском терминале поддерживает функцию поиска транспортного средства. Она позволяет не только получать уведомления о поиске устройства, но также получать и расстояние до самоуравновешивающегося транспортного средства, что более полно удовлетворяет потребности пользователей и улучшает пользовательское восприятие.
[00219] В настоящем изобретении пользовательский терминал может поддерживать функцию дистанционного управления самоуравновешивающимся транспортным средством и передавать заданную пользователем информацию о направлении движения и скорости движения в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства. Благодаря этому может быть удовлетворена потребность пользователей в дистанционном управлении самоуравновешивающимся транспортным средством, а также улучшено пользовательское восприятие.
[00220] В настоящем изобретении пользовательский терминал может также поддерживать функцию навигации и может возвращать информацию навигации пользователю, при необходимости, в реальном времени, благодаря чему пользователь может своевременно получать информацию навигации. Это снижает вероятность того, что пользователь заблудится, повышает безопасность применения самоуравновешивающегося транспортного средства пользователем, а также улучшает пользовательское восприятие.
[00221] В настоящем изобретении пользовательский терминал может поддерживать функцию компаса. Направление, указываемое компасом системы, может отображаться в интерфейсе управления в реальном времени, благодаря чему пользователь может своевременно получать информацию навигации. Это снижает вероятность того, что пользователь заблудится и повышает безопасность применения самоуравновешивающегося транспортного средства пользователем, а также улучшает пользовательское восприятие.
[00222] В настоящем изобретении пользовательский терминал может поддерживать функцию удаленного обновления самоуравновешивающегося транспортного средства и передавать инструкцию обновления в самоуравновешивающееся транспортное средство по соединению Bluetooth, благодаря чему самоуравновешивающееся транспортное средство может выполнять обновление согласно инструкции обновления и возвращать результат обновления в пользовательский терминал, что позволяет расширить возможности управления самоуравновешивающимся транспортным средством, повысить эффективность управления самоуравновешивающимся транспортным средством, а также повысить безопасность применения самоуравновешивающегося транспортного средства пользователем.
[00223] В настоящем изобретении пользовательский терминал может поддерживать функцию пользовательского взаимодействия и устанавливать соединение с сервером с целью передачи или приема информации взаимодействия. Благодаря этому могут быть удовлетворены различные потребности пользователей и улучшено пользовательское восприятие.
[00224] В настоящем изобретении пользовательский терминал может получать с сервера и отображать статистические результаты для самоуравновешивающегося транспортного средства, что дает пользователю возможность более эффективно управлять самоуравновешивающимся транспортным средством согласно статистическим результатам. Благодаря этому пользователь может управлять самоуравновешивающимся транспортным средством более безопасно и более эффективно, что также улучшает пользовательское восприятие.
Краткое описание чертежей
[00225] На приложенных чертежах, которые входят в состав настоящего описания и являются его неотъемлемой частью, проиллюстрированы варианты осуществления, соответствующие настоящему изобретению. Приложенные чертежи, вместе с описанием, служат для разъяснения замысла настоящего изобретения:
[00226] Фиг. 1 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с одним из примеров осуществления настоящего изобретения;
[00227] Фиг. 2 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с другим примером осуществления настоящего изобретения;
[00228] Фиг. 3 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00229] Фиг. 4 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00230] Фиг. 5 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00231] Фиг. 6 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00232] Фиг. 7 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00233] Фиг. 8 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00234] Фиг. 9 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00235] Фиг. 10 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00236] Фиг. 11 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00237] Фиг. 12 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00238] Фиг. 13 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00239] Фиг. 14 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00240] Фиг. 15 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00241] Фиг. 16 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00242] Фиг. 17 представляет собой блок-схему, иллюстрирующую сценарий применения способа управления самоуравновешивающимся транспортным средством в соответствии с одним из примеров осуществления настоящего изобретения;
[00243] Фиг. 18 представляет собой эскизную иллюстрацию отображения в интерфейсе управления пользовательского терминала в соответствии с одним из примеров осуществления настоящего изобретения;
[00244] Фиг. 19 представляет эскизную иллюстрацию отображения в интерфейсе управления пользовательского терминала в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00245] Фиг. 20 представляет эскизную иллюстрацию отображения в интерфейсе управления пользовательского терминала в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00246] Фиг. 21 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с одним из примеров осуществления настоящего изобретения;
[00247] Фиг. 22 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с другим примером осуществления настоящего изобретения;
[00248] Фиг. 23 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00249] Фиг. 24 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00250] Фиг. 25 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00251] Фиг. 26 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00252] Фиг. 27 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00253] Фиг. 28 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00254] Фиг. 29 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00255] Фиг. 30 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00256] Фиг. 31 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00257] Фиг. 32 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00258] Фиг. 33 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00259] Фиг. 34 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00260] Фиг. 35 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00261] Фиг. 36 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00262] Фиг. 37 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00263] Фиг. 38 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00264] Фиг. 39 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00265] Фиг. 40 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00266] Фиг. 41 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00267] Фиг. 42 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00268] Фиг. 43 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00269] Фиг. 44 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00270] Фиг. 45 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00271] Фиг. 46 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00272] Фиг. 47 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00273] Фиг. 48 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00274] Фиг. 49 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00275] Фиг. 50 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00276] Фиг. 51 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения;
[00277] Фиг. 52 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения; и
[00278] Фиг. 53 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения.
Подробное описание изобретения
[00279] Далее настоящее изобретение будет описано более подробно с помощью конкретных примеров его осуществления, которые проиллюстрированы на приложенных чертежах. В приведенном ниже описании осуществляются ссылки на приложенные чертежи, где, если не указано обратное, аналогичными обозначениями на различных чертежах обозначены одинаковые или аналогичные элементы. Реализации примеров осуществления настоящего изобретения, изложенные в приведенном ниже описании, не являются всеми возможными реализациями, соответствующими настоящему изобретению. Напротив, они являются исключительно примерами устройств и способов, которые соответствуют аспектам, связанным с настоящим изобретением и изложенным в приложенной формуле изобретения.
[00280] Терминология, использованная в настоящем документе, имеет целью исключительно описание конкретных вариантов осуществления настоящего изобретения, но не его ограничение. В настоящем документе и приложенной формуле изобретения выражения в единственном числе, такие как «один из», «упомянутый» или «данный», подразумевают также включение означаемых во множественном числе, если только на обратное не указано явно. Нужно также понимать, что выражение «и/или» в настоящем документе означает любой из перечисленных в связи с ним элементов, а также все возможные их комбинации.
[00281] Если какой-либо из элементов описан с использованием таких выражений, как «первый», «второй», «третий» и т.п., то этот элемент не ограничен подобными терминами. Эти термины используют исключительно для различения друг от друга элементов одного типа. Например, в пределах объема настоящего изобретения первый элемент может также быть назван вторым элементом. Аналогично, второй элемент может также быть назван первым элементом. В зависимости от контекста, выражение «если» в настоящем документе может интерпретироваться как «когда», «при том условии, что» или «в ответ на».
[00282] Фиг. 1 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале.
Способ включает следующие шаги.
[00283] На шаге 110 устанавливают соединение с самоуравновешивающимся транспортным средством по протоколу Bluetooth.
[00284] В данном варианте осуществления настоящего изобретения после установления пользовательским терминалом соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth терминал может обмениваться данными с самоуравновешивающимся транспортным средством по протоколу Bluetooth в ближней зоне. При этом самоуравновешивающееся транспортное средство может быть выбрано пользователем и может допускать управление пользователем.
[00285] На шаге 120 получают информацию о состоянии движения самоуравновешивающегося транспортного средства по соединению Bluetooth.
[00286] В данном варианте осуществления настоящего изобретения информация о состоянии движения самоуравновешивающегося транспортного средства может включать по меньшей мере одно из следующего: оставшаяся на текущий момент энергия аккумулятора, текущее состояние блокировки или текущее состоянии разблокировки, текущий цвет световой сигнализации, текущее направление движения, текущая скорость движения, текущая температура корпуса и текущее местоположение.
[00287] На шаге 130 самоуравновешивающимся транспортным средством управляют согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[00288] В данном варианте осуществления настоящего изобретения пользовательский терминал предоставляет пользователю платформу, позволяющую управлять самоуравновешивающимся транспортным средством, т.е. интерфейс управления самоуравновешивающимся транспортным средством. При этом в интерфейсе управления может отображаться информация о состоянии движения самоуравновешивающегося транспортного средства, что делает управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения более простым для пользователя.
[00289] К примеру, текущим цветом световой сигнализации самоуравновешивающегося транспортного средства может быть белый, тогда как пользователь может предпочитать синий. При помощи интерфейса управления пользователь может назначить синий цвет световой сигнализации.
[00290] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал устанавливает соединение с самоуравновешивающимся транспортным средством по протоколу Bluetooth получает информацию о состоянии движения самоуравновешивающегося транспортного средства по соединению Bluetooth; и управляет самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства. Таким образом, пользовательский терминал позволяет управлять состоянием движения самоуравновешивающегося транспортного средства по соединению Bluetooth. Благодаря этому не только повышается эффективность управления самоуравновешивающимся транспортным средством, но также обеспечивается удобство управления самоуравновешивающимся транспортным средством для пользователя, что позволяет улучшить пользовательское восприятие.
[00291] Фиг. 2 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с другим примером осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00292] На шаге 210 обнаруживают, присутствует ли событие регулировки скорости.
[00293] В данном варианте осуществления настоящего изобретения событие регулировки скорости может автоматически инициироваться пользовательским терминалом согласно информации о состоянии движения самоуравновешивающегося транспортного средства. К примеру, если скорость движения самоуравновешивающегося транспортного средства является слишком высокой и необходима регулировка скорости движения самоуравновешивающегося транспортного средства, пользовательский терминал может автоматически инициировать событие регулировки скорости. При этом событие регулировки скорости может также быть инициировано пользователем. К примеру, если пользователю необходима регулировка скорости движения самоуравновешивающегося транспортного средства, он также может инициировать событие регулировки скорости.
[00294] Опционально, когда обнаружено, что событие регулировки скорости присутствует, может быть применен по меньшей мере один из двух описанных ниже методов.
[00295] Первый метод: обнаруживают, присутствует ли событие операции, представляющей собой регулировку величины скорости на приборной панели в интерфейсе управления.
[00296] В данном варианте осуществления настоящего изобретения интерфейс управления включает приборную панель, где обеспечена подвижная точка, которую пользователь может перемещать «перетаскиванием». Расстояние между подвижной точкой и центральной точкой приборной панели может указывать на величину скорости. Чем больше расстояние между подвижной точкой и центральной точкой приборной панели, тем больше величина скорости, что имеет результатом более высокую скорость движения самоуравновешивающегося транспортного средства. Соответственно, пользователь может перемещать, «перетаскиванием», подвижную точку на приборной панели, что позволяет ему выполнять регулировку скорости движения самоуравновешивающегося транспортного средства.
[00297] Второй метод: обнаруживают, присутствует ли событие операции, представляющей собой регулировку панели управления скоростью в интерфейсе управления.
[00298] В данном варианте осуществления настоящего изобретения интерфейс управления включает панель управления скоростью, где обеспечена подвижная точка, которую можно перемещать «перетаскиванием». Расстояние по прямой между подвижной точкой и начальным концом панели управления скоростью может указывать на величину скорости. Чем больше расстояние по прямой между подвижной точкой и начальным концом панели управления скоростью, тем больше величина скорости, что имеет результатом более высокую скорость движения самоуравновешивающегося транспортного средства. Соответственно, пользователь может передвигать подвижную точку на панели управления скоростью, что позволяет ему выполнять регулировку скорости движения самоуравновешивающегося транспортного средства.
[00299] На шаге 220, когда обнаружено, что событие регулировки скорости присутствует, принятое значение регулировки скорости передают в самоуравновешивающееся транспортное средство по соединению Bluetooth.
[00300] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал поддерживает регулировку скорости самоуравновешивающегося транспортного средства и передает значение регулировки скорости, заданное пользователем, в самоуравновешивающееся транспортное средство по соединению Bluetooth, что дает пользователю возможность выполнять регулировку скорости самоуравновешивающегося транспортного средства и улучшает пользовательское восприятие.
[00301] Фиг. 3 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Шаг 110, который представляет собой установление соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth, может включать шаги, описанные ниже.
[00302] На шаге 310 выполняют поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth.
[00303] В данном варианте осуществления настоящего изобретения, когда выполняют поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth, может быть найдено одно самоуравновешивающееся транспортное средство из множества самоуравновешивающихся транспортных средств.
[00304] На шаге 320 выполняют сопряжение Bluetooth-соединения с найденным самоуравновешивающимся транспортным средством в целях установления соединения.
[00305] В данном варианте осуществления настоящего изобретения, если найдено только одно самоуравновешивающееся транспортное средство, то упомянутое соединение устанавливают после сопряжения Bluetooth-соединения с найденным самоуравновешивающимся транспортным средством; если найдено несколько самоуравновешивающихся транспортных средств, может устанавливаться соединение с несколькими самоуравновешивающимися транспортными средствами или пользователь может выбирать самоуравновешивающиеся транспортные средства, соединение с которыми необходимо установить.
[00306] Опционально, при выполнении шага 320, на котором осуществляется сопряжение Bluetooth-соединения с найденным самоуравновешивающимся транспортным средством, для установления соединения может дополнительно применяться следующее:
[00307] когда количество найденных самоуравновешивающихся транспортных средств превышает единицу, принимают инструкцию выбора, относящуюся к самоуравновешивающемуся транспортному средству; и согласно этой инструкции выбора устанавливают соединение с самоуравновешивающимся транспортным средством, выбранным пользователем.
[00308] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал может выполнять поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth, и устанавливать соединение Bluetooth с найденным самоуравновешивающимся транспортным средством. А именно, пользовательский терминал может устанавливать соединение с самоуравновешивающимся транспортным средством, выбранным пользователем, что дает возможность пользователю сэкономить время на поиск самоуравновешивающегося транспортного средства и повышает эффективность поиска самоуравновешивающегося транспортного средства пользователем.
[00309] Фиг. 4 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Шаг 120, который представляет собой получение информации о состоянии движения самоуравновешивающегося транспортного средства по соединению Bluetooth, может включать шаг 410 или шаг 420.
[00310] На шаге 410 по соединению Bluetooth принимают информацию о состоянии движения самоуравновешивающегося транспортного средства, периодически передаваемую самоуравновешивающимся транспортным средством.
[00311] На шаге 420 выполняют периодическую передачу инструкции запроса состояния в самоуравновешивающееся транспортное средство и прием информации о состоянии движения самоуравновешивающегося транспортного средства, возвращенной самоуравновешивающимся транспортным средством согласно принятой инструкции запроса состояния.
[00312] Шаг 410, описанный выше, представляет собой метод пассивного приема, а шаг 420 представляет собой метод активного запроса, оба из которых позволяют получить информацию о состоянии движения самоуравновешивающегося транспортного средства и затем отобразить эту информацию в интерфейсе управления, что делает управление самоуравновешивающимся транспортным средством согласно этой информации более простым для пользователя.
[00313] В данном варианте осуществления настоящего изобретения, когда самоуравновешивающимся транспортным средством управляют при помощи пользовательского терминала, необходимо получение информации о состоянии движения самоуравновешивающегося транспортного средства. Информация о состоянии движения самоуравновешивающегося транспортного средства может быть получена методом пассивного приема или методом активного запроса, что позволяет повысить эффективность получения информации о состоянии движения самоуравновешивающегося транспортного средства пользовательским терминалом.
[00314] Фиг. 5 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Шаг 130 управления самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства может включать шаг 510 и/или шаг 520.
[00315] На шаге 510 информацию о состоянии движения самоуравновешивающегося транспортного средства отображают в интерфейсе управления.
[00316] В данном варианте осуществления настоящего изобретения интерфейс управления является платформой, которая предоставлена пользователю при помощи пользовательского терминала и дает ему возможность управлять самоуравновешивающимся транспортным средством. При этом в интерфейсе управления отображается информация о состоянии движения самоуравновешивающегося транспортного средства, что делает управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения более простым для пользователя.
[00317] Опционально, на шаге 510 отображения информации о состоянии движения самоуравновешивающегося транспортного средства в интерфейсе управления соответствующее отображение выполняют согласно отличающейся информации о состоянии движения:
[00318] отображение скорости движения самоуравновешивающегося транспортного средства в интерфейсе управления; и/или
[00319] отображение оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства в интерфейсе управления; и/или
[00320] отображение температуры корпуса самоуравновешивающегося транспортного средства в интерфейсе управления.
[00321] К примеру, содержимое, отображаемое в интерфейсе управления, включает следующую информацию: скорость движения самоуравновешивающегося транспортного средства составляет 5 км/ч, оставшаяся энергия аккумулятора составляет 40%, оставшаяся дальность продолжения поездки составляет 20 км и т.п.
[00322] Опционально, на шаге 510 отображения информации о состоянии движения в интерфейсе она может дополнительно включать следующее содержимое:
[00323] когда информация о состоянии движения самоуравновешивающегося транспортного средства содержит данные об оставшейся энергии аккумулятора, вычисление оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора; и отображение оставшейся дальности продолжения поездки в интерфейсе управления.
[00324] Также, опционально, когда вычисляют оставшуюся дальность продолжения поездки согласно оставшейся энергии аккумулятора, оставшаяся дальность продолжения поездки может быть получена как произведение оставшейся энергии аккумулятора на реконфигурируемый коэффициент корреляции в соответствии с формулой (1):
[00325] оставшаяся дальность продолжения поездки = оставшейся энергия аккумулятора × реконфигурируемый коэффициент корреляции. Формула (1)
[00326] При этом реконфигурируемый коэффициент корреляции может представлять собой значение, полученное на основе практического опыта.
[00327] К примеру, содержимое, отображаемое в интерфейсе управления, дополнительно включает информацию о том, что температура корпуса равна 45°.
[00328] На шаге 520 выполняют обнаружение информации о состоянии движения, и выдают предупреждение, когда информация о состоянии движения указывает на достижение соответствующего порогового состояния движения.
[00329] В данном варианте осуществления настоящего изобретения возможно множество различных методов выдачи предупреждения, которое может представлять собой, например, цветовую сигнализацию, звуковую сигнализацию и т.п.
[00330] Опционально, на шаге 510 выдачи предупреждения, когда информация о состоянии движения самоуравновешивающегося транспортного средства указывает на достижение порогового состояния движения, выдачу соответствующего предупреждения выполняют согласно другим пороговым значениям для состояния движения:
[00331] выдача предупреждения, когда оставшаяся энергия аккумулятора самоуравновешивающегося транспортного средства меньше пороговой энергии аккумулятора; и/или
[00332] выдача предупреждения, когда скорость движения самоуравновешивающегося транспортного средства выше, чем пороговая скорость; и/или
[00333] выдача предупреждения, когда температура корпуса самоуравновешивающегося транспортного средства выше, чем пороговая температура.
[00334] Например, когда оставшаяся энергия аккумулятора самоуравновешивающегося транспортного средства выше, чем пороговая энергия аккумулятора, для отображения оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства используют зеленый цвет, что указывает на достаточное количество оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства; когда оставшаяся энергия аккумулятора самоуравновешивающегося транспортного средства равна пороговой энергии аккумулятора, для отображения оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства используют желтый цвет, что указывает на достижение критического значения оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства; когда оставшаяся энергия аккумулятора самоуравновешивающегося транспортного средства ниже порогового значения энергии аккумулятора, для отображения оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства используют красный цвет, что указывает на недостаточность оставшейся энергии аккумулятора и на необходимость подзарядки самоуравновешивающегося транспортного средства, благодаря чему, когда пользователь замечает красный цвет, он может своевременно подзарядить самоуравновешивающееся транспортное средство.
[00335] Как можно видеть из описанного выше варианта осуществления настоящего изобретения терминал отображает информацию о состоянии движения самоуравновешивающегося транспортного средства в интерфейсе управления, а также выполняет контроль информации о состоянии движения. Когда какие-либо данные в информации о состоянии движения указывают на достижение соответствующего порогового состояния движения, выдается предупреждение. Соответственно, пользователь может предпринимать соответствующие меры безопасности, связанные с самоуравновешивающимся транспортным средством согласно различным предупреждениям пользовательского терминала, что позволяет повысить безопасность применения самоуравновешивающегося транспортного средства пользователем и улучшить пользовательское восприятие.
[00336] Фиг. 6 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00337] На шаге 610 определяют, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки.
[00338] В данном варианте осуществления настоящего изобретения, если информация о состоянии движения включает информацию о состоянии блокировки или разблокированном состоянии самоуравновешивающегося транспортного средства, то на основе информации о состоянии движения самоуравновешивающегося транспортного средства может выполняться определение, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки.
[00339] На шаге 620, когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, состояние блокировки самоуравновешивающегося транспортного средства сбрасывают.
[00340] В данном варианте осуществления настоящего изобретения состояние блокировки самоуравновешивающегося транспортного средства может быть сброшено в соответствии с инструкцией от пользователя.
[00341] Опционально, для сброса состояния блокировки самоуравновешивающегося транспортного средства может применяться метод, описанный ниже.
[00342] Когда обнаружена операция, инициирующая сброс блокировки, в самоуравновешивающееся транспортное средство по упомянутому соединению передают инструкцию разблокировки, в результате чего самоуравновешивающееся транспортное средство сбрасывает состояние блокировки согласно принятой инструкции разблокировки.
[00343] При этом операция, инициирующая сброс блокировки, может также быть активирована пользователем.
[00344] Опционально, после шага 610, на котором определяют, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки, способ может дополнительно включать шаги, описанные ниже.
[00345] На шаге 630, когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, в самоуравновешивающееся транспортное средство передают запрос на получение оставшейся энергии аккумулятора.
[00346] На шаге 640 принимают оставшуюся энергию аккумулятора, возвращенную самоуравновешивающимся транспортным средством.
[00347] На шаге 650 оставшуюся энергию аккумулятора отображают в экранном интерфейсе блокировки.
[00348] При этом, опционально, после шага 640, на котором принимают оставшуюся энергию аккумулятора, переданную самоуравновешивающимся транспортным средством, может быть также вычислена оставшаяся дальность продолжения поездки, согласно оставшейся энергии аккумулятора, и оставшаяся дальность продолжения поездки может быть отображена в экранном интерфейсе блокировки. При этом один из методов вычисления оставшейся дальности продолжения поездки может быть представлен формулой (1).
[00349] В данном варианте осуществления настоящего изобретения, когда самоуравновешивающееся транспортное средство находится в состоянии блокировки, пользовательский терминал может также получать информацию об оставшейся энергии аккумулятора и оставшейся дальности продолжения поездки самоуравновешивающегося транспортного средства и отображать информацию об оставшейся энергии аккумулятора и оставшейся дальности продолжения поездки самоуравновешивающегося транспортного средства в экранном интерфейсе блокировки. Соответственно, пользователь имеет возможность определить, необходима ли подзарядка самоуравновешивающегося транспортного средства, согласно оставшейся энергии аккумулятора и оставшейся дальности продолжения поездки самоуравновешивающегося транспортного средства в экранном интерфейсе блокировки. Это позволяет улучшить пользовательское восприятие, а также повысить безопасность применения самоуравновешивающегося транспортного средства.
[00350] Фиг. 7 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00351] На шаге 710 выполняют обнаружение, присутствует ли событие назначения цвета световой сигнализации для самоуравновешивающегося транспортного средства.
[00352] В данном варианте осуществления настоящего изобретения событие назначения цвета световой сигнализации может быть инициировано пользователем. Пользователь может назначать цвет световой сигнализации при помощи события назначения цвета световой сигнализации. К примеру, пользователь может осуществлять выбор из различных заранее заданных цветов, предлагаемых пользовательским терминалом, или пользователь может, дополнительно, вводить конкретные значения цвета и т.п.
[00353] На шаге 720, когда обнаружено событие назначения цвета световой сигнализации, принимают значение цвета световой сигнализации, выбранное пользователем.
[00354] На шаге 730 инструкцию регулировки цвета, в которой содержится выбранное значение цвета световой сигнализации, передают в самоуравновешивающееся транспортное средство по соединению Bluetooth.
[00355] Как можно видеть из описанного выше варианте осуществления настоящего изобретения, пользовательский терминал может поддерживать назначение пользователем цвета световой сигнализации и передавать инструкцию регулировки цвета, содержащую выбранное значение цвета световой сигнализации, в самоуравновешивающееся транспортное средство по соединению Bluetooth. Это позволяет удовлетворить требования пользователей в отношении цвета световой сигнализации, что позволяет улучшить пользовательское восприятие.
[00356] Фиг. 8 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00357] На шаге 810 выполняют обнаружение, присутствует ли событие, инициирующее режим камеры.
[00358] В данном варианте осуществления настоящего изобретения в интерфейсе управления обеспечивают метод быстрого доступа к камере. В соответствии с иллюстрацией, фиг. 20, режим камеры может быть активирован при помощи нажатия на значение скорости (5 км/ч) в центре, при этом изображение окружающего пространства, захваченное камерой, может отображаться непосредственно в интерфейсе управления в качестве фона. Это позволяет исключить ситуацию, в которой пользователь мог бы забыть о необходимости наблюдения за окружающим пространством во время использования терминала, благодаря чему может быть улучшено пользовательское восприятие.
[00359] На шаге 820, когда обнаружено событие, инициирующее режим камеры, активируют режим камеры и изображение, захваченное камерой, отображают в качестве фона в интерфейсе управления.
[00360] В данном варианте осуществления настоящего изобретения после активации режима камеры изображение окружающего пространства, захваченное камерой, может непосредственно отображаться в интерфейсе управления в качестве фона. Это позволяет исключить ситуацию, в которой пользователь мог бы забыть о необходимости наблюдения за окружающим пространством во время использования терминала.
[00361] В одном из вариантов осуществления настоящего изобретения, на шаге 820, который представляет собой отображение изображения, захваченного камерой, в качестве фона в интерфейсе управления, изображение, захваченное камерой, может вставляться под слой интерфейса управления, предназначенного для взаимодействия с пользователем, в реальном времени.
[00362] В одном из вариантов осуществления настоящего изобретения интерфейс управления может включать множество слоев. Чтобы обеспечить пользователю видимость изображения, захваченного камерой, в то время, как он управляет самоуравновешивающимся транспортным средством, изображение, захваченное камерой, вставляют под слой интерфейса управления, предназначенный для взаимодействия с пользователем, в реальном времени.
[00363] В одном из вариантов осуществления настоящего изобретения шаг 820, на котором отображают изображение, захваченное камерой, в качестве фона в интерфейсе управления, может дополнительно включать шаги, описанные ниже.
[00364] На шаге 830, в режиме камеры, когда обнаружена операция, инициирующая фотографирование, в камере активируют функцию фотографирования.
[00365] В данном варианте осуществления настоящего изобретения пользователю может быть обеспечено множество различных методов для инициирования операции фотографирования. Пользователь может нажимать на кнопку фотографирования в интерфейсе управления или нажимать на физическую клавишу, что инициирует операцию фотографирования, например нажимать на клавишу регулировки громкости.
[00366] Как можно видеть из описанного выше варианте осуществления настоящего изобретения, пользовательский терминал может поддерживать режим камеры, благодаря чему пользователь может получать информацию о ситуации в окружающем пространстве и осуществлять фотографирование во время управления самоуравновешивающимся транспортным средством. Таким образом, различные потребности пользователя могут быть удовлетворены в большей степени, при этом также обеспечивается повышенная безопасность применения самоуравновешивающегося транспортного средства пользователем.
[00367] Фиг. 9 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00368] На шаге 91 выполняют обнаружение, принята ли операция поиска транспортного средства от пользователя.
[00369] В данном варианте осуществления настоящего изобретения интерфейс управления поддерживает операцию поиска транспортного средства пользователем. Когда пользователю требуется использовать самоуравновешивающееся транспортное средство, он может инициировать операцию поиска транспортного средства. Операция поиска транспортного средства может представлять собой нажатие на кнопку поиска транспортного средства в интерфейсе управления, может представлять собой нажатие на физическую клавишу, которая инициирует операцию поиска транспортного средства, или может также представлять голосовую инструкцию и т.п.
[00370] На шаге 92, после приема операции поиска транспортного средства, инициированной пользователем, выполняют поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth и выполняют сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством.
[00371] На шаге 93, когда происходит сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством, инструкцию поиска транспортного средства передают в самоуравновешивающееся транспортное средство, в результате чего самоуравновешивающееся транспортное средство выполняет уведомление о поиске транспортного средства.
[00372] В данном варианте осуществления настоящего изобретения уведомление о поиске транспортного средства может представлять собой звуковую сигнализацию, световую сигнализацию и т.п.
[00373] Опционально, после шага 92, который представляет собой поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth и сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством, способ может дополнительно включать шаги, описанные ниже.
[00374] На шаге 94 получают расстояние до самоуравновешивающегося транспортного средства по Bluetooth-соединению с самоуравновешивающимся транспортным средством.
[00375] Например, расстояние между пользовательским терминалом и самоуравновешивающимся транспортным средством может составлять 5 м.
[00376] На шаге 95 расстояние до самоуравновешивающегося транспортного средства отображают в интерфейсе управления.
[00377] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, интерфейс управления в пользовательском терминале поддерживает функцию поиска транспортного средства. Она позволяет не только получать уведомления о поиске устройства, но также получать и расстояние до самоуравновешивающегося транспортного средства, что более полно удовлетворяет потребности пользователей и улучшает пользовательское восприятие.
[00378] Фиг. 10 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 9, и может дополнительно включать шаги, описанные ниже.
[00379] На шаге 101 выполняют обнаружение, присутствует ли событие, инициирующее движение с дистанционным управлением.
[00380] На шаге 102, когда обнаружено, что присутствует событие, инициирующее движение с дистанционным управлением, активируют функцию движения с дистанционным управлением и принимают заданную информацию о направлении движения и скорости движения, введенную пользователем.
[00381] На шаге 103 заданную информацию о направлении движения и скорости движения передают в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства.
[00382] В одном из вариантов осуществления настоящего изобретения на шаге 102, который представляет собой активацию функции дистанционного управления движением и прием заданной информации о направлении движения и скорости движения, введенной пользователем, могут применяться следующие методы обработки данных:
[00383] (1) активация функции дистанционного управления движением и обнаружение, присутствует ли событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства; и
[00384] (2) когда обнаружено, что присутствует событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства, прием заданной информации о направлении движения и скорости движения, введенной пользователем.
[00385] В одном из вариантов осуществления настоящего изобретения, в описанном выше методе (1) обнаружения, присутствует ли событие назначения направлении движения и скорости движения, может применяться следующий метод обработки данных:
[00386] обнаружение, присутствует ли событие операции, представляющей собой регулировку угла направления на приборной панели в интерфейсе управления и регулировку расстояния от центра приборной панели в интерфейсе управления.
[00387] В одном из вариантов осуществления настоящего изобретения интерфейс управления включает приборную панель. При помощи перемещения («перетаскивания») подвижной точки на приборной панели пользователь может выполнять регулировку направления движения и скорости движения самоуравновешивающегося транспортного средства. К примеру, пользователь может смещать подвижную точку вверх, вниз, влево и вправо, при этом соответствующими направлениями движения самоуравновешивающегося транспортного средства будут вперед, назад, влево и вправо. Пользовательский терминал регистрирует местоположение подвижной точки и вычисляет угол наклона между позицией подвижной точки и прямой линией в центре приборной панели, представляющей собой 0°. Угол наклона представляет собой угол направления самоуравновешивающегося транспортного средства. При этом расстояние между позицией подвижной точки и центом приборной панели отражает скорость движения самоуравновешивающегося транспортного средства.
[00388] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал поддерживает функцию дистанционного управления, при этом выполняют обнаружение, присутствует ли событие, инициирующее движение с дистанционным управлением; если обнаружено событие, инициирующее движение с дистанционным управлением, активируют функцию движения с дистанционным управлением и принимают заданную информацию о направлении движения и скорости движения, введенную пользователем; заданную информацию о направлении движения и скорости движения передают в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства, что позволяет более полно удовлетворить потребности пользователей в отношении дистанционного управления и улучшить пользовательское восприятие.
[00389] Фиг. 11 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 10, и может дополнительно включать шаги, описанные ниже.
[00390] На шаге 111 выполняют обнаружение, присутствует ли событие, инициирующее движение с дистанционным управлением.
[00391] В одном из вариантов осуществления настоящего изобретения интерфейс управления включает приборную панель. Нажатие в центральной точке приборной панели может представлять событие, инициирующее движение с дистанционным управлением. Нажатие пользователем на кнопку, инициирующую движение с дистанционным управлением, указывает на то, что присутствует событие, инициирующее движение с дистанционным управлением.
[00392] На шаге 112, когда обнаружено, что присутствует событие, инициирующее движение с дистанционным управлением, активируют функцию движения с дистанционным управлением и принимают заданную информацию о направлении движения и скорости движения, введенную пользователем.
[00393] В данном варианте осуществления настоящего изобретения информация назначения направлении движения и скорости движения может быть информацией, непосредственно введенной пользователем, или может представлять собой информацию, полученную пользовательским терминалом в результате выполнения пользователем определенной операции при выполнении пользователем различных операций в интерфейсе управления.
[00394] На шаге 113 заданную информацию о направлении движения и скорости движения передают в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства.
[00395] К примеру, если пользователь находится на некотором расстоянии от самоуравновешивающегося транспортного средства, то он может применять пользовательский терминал для дистанционного управления самоуравновешивающимся транспортным средством, чтобы переместить его к себе, при этом он может также дистанционно управлять скоростью движения самоуравновешивающегося транспортного средства.
[00396] Опционально, способ управления самоуравновешивающимся транспортным средством, проиллюстрированный в шагах 111-113, может дополнительно включать шаги, описанные ниже.
[00397] На шаге 114 выполняют обнаружение, присутствует ли операция ограничения скорости самоуравновешивающегося транспортного средства.
[00398] В данном варианте осуществления настоящего изобретения операцией ограничения скорости является назначение значения, ограничивающего скорость. Значение, ограничивающее скорость, может представлять собой значение, ограничивающее скорость, которое непосредственно введено пользователем, или значение, ограничивающее скорость, которое получено пользовательским терминалом в результате выполнения пользователем определенной операции при выполнении пользователем операций в интерфейсе управления; оно может также быть значением, заранее заданным в пользовательском терминале или значением, заданным на стороне сервера.
[00399] Опционально, для обнаружения, присутствует ли операция ограничения скорости самоуравновешивающегося транспортного средства, может применяться следующий метод:
[00400] обнаружение, присутствует ли назначение максимальной скорости движения для панели управления скоростью в интерфейсе дистанционного управления движением.
[00401] В данном варианте осуществления настоящего изобретения интерфейс дистанционного управления движением может включать панель управления скоростью, где обеспечена подвижная точка, которую пользователь может перемещать «перетаскиванием». Расстояние по прямой между подвижной точкой и начальным концом панели управления скоростью может указывать на значение, ограничивающее скорость. Чем больше расстояние по прямой между подвижной точкой и начальным концом панели управления скоростью, тем больше значение, ограничивающее скорость. Соответственно, пользователь может передвигать подвижную точку на панели управления скоростью, что позволяет ему выполнять ограничение скорости движения самоуравновешивающегося транспортного средства.
[00402] На шаге 115, когда обнаружена операция ограничения скорости самоуравновешивающегося транспортного средства, назначение скорости пользователем ограничивают пределами диапазона ограничения скорости.
[00403] В данном варианте осуществления настоящего изобретения интерфейс дистанционного управления движением включает приборную панель, где обеспечена подвижная точка, которую пользователь может перемещать «перетаскиванием». Расстояние между подвижной точкой и центральной точкой приборной панели может указывать на величину скорости. Чем больше расстояние между подвижной точкой и центральной точкой приборной панели, тем больше величина скорости, назначенная пользователем. При этом наибольшее расстояние между подвижной точкой и центральной точкой приборной панели меньше или равно значению, ограничивающему скорость, и, соответственно, пользователь может перемещать подвижную точку в пределах приборной панели, то есть назначение скорости пользователем возможно только в пределах диапазона ограничения скорости.
[00404] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал может поддерживать функцию дистанционного управления самоуравновешивающимся транспортным средством и передавать назначенную пользователем информацию о направлении движения и скорости движения в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства. Благодаря этому может быть удовлетворена потребность пользователей в дистанционном управлении самоуравновешивающимся транспортным средством, а также улучшено пользовательское восприятие.
[00405] Фиг. 12 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00406] На шаге 121 выполняют обнаружение, не принята ли от пользователя операция, инициирующая навигацию.
[00407] В данном варианте осуществления настоящего изобретения интерфейс управления в пользовательском терминал включает кнопку навигации, которая предназначена для навигации пользователя. Нажатие на кнопку навигации пользователем указывает на то, что пользователю необходимо навигационное сопровождение. К примеру, когда пользователю необходимо определить свое текущее местоположение, операция нажатия пользователем может представлять собой операцию, инициирующую навигацию.
[00408] На шаге 122, если принята операция, инициирующая навигацию, вызывают функцию карты для получения и отображения информации навигации в реальном времени.
[00409] В данном варианте осуществления настоящего изобретения пользовательский терминал может не только управлять самоуравновешивающимся транспортным средством, но также и вызывать функцию карты в целях удовлетворения нужд пользователя в навигационном сопровождении.
[00410] Опционально, на шаге 122 для вызова функции карты с целью получения и отображения информации навигации может применяться следующий метод:
[00411] активация функции карты и переключение на интерфейс навигации с целью получения и отображения текущего местоположения, а также данных навигации в реальном времени.
[00412] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал может также поддерживать функцию навигации и может возвращать информацию навигации пользователю, при необходимости навигации, в реальном времени, благодаря чему пользователь может своевременно получать информацию навигации. Это снижает вероятность того, что пользователь заблудится, и повышает безопасность применения самоуравновешивающегося транспортного средства пользователем, а также улучшает пользовательское восприятие.
[00413] Фиг. 13 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00414] На шаге 131 выполняют обнаружение, не принята ли от пользователя операция, инициирующая компас.
[00415] В данном варианте осуществления настоящего изобретения операция, вызывающая компас, имеет целью получение информации о направлении, при этом операция, инициирующая компас, может быть инициирована пользователем или инициирована пользовательским терминалом.
[00416] На шаге 132, если обнаружена операция, инициирующая компас, получают направление, указываемое компасом системы.
[00417] На шаге 133 направление, указываемое компасом системы, отображают в интерфейсе управления в реальном времени.
[00418] В данном варианте осуществления настоящего изобретения интерфейс управления включает приборную панель, на которой может отображаться направление, указываемое компасом системы, благодаря чему пользователь может назначать направление движения самоуравновешивающегося транспортного средства исходя из отображаемого направления.
[00419] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал поддерживает функцию компаса. Направление, указываемое компасом системы, может отображаться в интерфейсе управления в реальном времени, благодаря чему пользователь может своевременно получать информацию навигации. Это снижает вероятность того, что пользователь заблудится, и повышает безопасность применения самоуравновешивающегося транспортного средства пользователем, а также улучшает пользовательское восприятие.
[00420] Фиг. 14 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00421] На шаге 141 выполняют обнаружение, не принята ли от пользователя операция, инициирующая удаленное обновление.
[00422] В данном варианте осуществления настоящего изобретения операция, инициирующая удаленное обновление, имеет целью обновление самоуравновешивающегося транспортного средства, при этом операция, инициирующая удаленное обновление, может быть инициирована пользователем, или инициирована терминалом автоматически, или она может также быть инициирована, когда обновление затребовано собственно самоуравновешивающимся транспортным средством.
[00423] На шаге 142, если от пользователя принята операция, инициирующая удавленное обновление, в самоуравновешивающееся транспортное средство по соединению Bluetooth передают инструкцию обновления.
[00424] В данном варианте осуществления настоящего изобретения пользовательский терминал передает инструкцию обновления в самоуравновешивающееся транспортное средство. Может быть выполнено обновление самоуравновешивающегося транспортного средства согласно инструкции обновления, а в пользовательский терминал может быть возвращен результат обновления.
[00425] На шаге 143 принимают результат обновления, возвращенный самоуравновешивающимся транспортным средством, и результат обновления отображают в интерфейсе управления.
[00426] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал может поддерживать функцию удаленного обновления самоуравновешивающегося транспортного средства и передавать инструкцию обновления в самоуравновешивающееся транспортное средство по соединению Bluetooth, благодаря чему самоуравновешивающееся транспортное средство выполняет обновление согласно инструкции обновления и возвращает результат обновления в пользовательский терминал, что позволяет расширить диапазон управления самоуравновешивающимся транспортным средством, повысить эффективность управления самоуравновешивающимся транспортным средством, а также повысить безопасность применения самоуравновешивающегося транспортного средства пользователем.
[00427] Фиг. 15 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00428] На шаге 151 выполняют обнаружение, присутствует ли операция, инициирующая пользовательское взаимодействие.
[00429] В данном варианте осуществления настоящего изобретения, когда пользователь самоуравновешивающегося транспортного средства использует самоуравновешивающееся транспортное средство, ему может быть необходима связь с пользователем другого самоуравновешивающегося транспортного средства. К примеру, пользователи множества самоуравновешивающихся транспортных средств могут захотеть обсудить друг с другом характеристики соответствующих самоуравновешивающихся транспортных средств. Соответственно, пользовательский терминал дополнительно предоставляет пользователю функцию пользовательского взаимодействия, благодаря которой пользователи могут взаимодействовать, на основе учетной записи пользователя или при помощи создания форума.
[00430] На шаге 152, если обнаружено, что имеет место операция, инициирующая взаимодействие с пользователями, происходит установление соединения с сервером с целью передачи или приема информации взаимодействия.
[00431] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал может поддерживать функцию пользовательского взаимодействия и устанавливать соединение с сервером с целью передачи или приема информации взаимодействия. Благодаря этому могут быть удовлетворены различные потребности пользователей и улучшено пользовательское восприятие.
[00432] Фиг. 16 представляет собой блок-схему алгоритма, иллюстрирующую способ управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который может применяться в пользовательском терминале. Данный способ основан на способе, показанном на фиг. 1, и может дополнительно включать шаги, описанные ниже.
[00433] На шаге 161 на сервер передают запрос о пользователях множества самоуравновешивающихся транспортных средств с целью получения сетевых данных.
[00434] В данном варианте осуществления настоящего изобретения пользователи соответствующих самоуравновешивающихся транспортных средств передают данные, используемые их собственными самоуравновешивающимися транспортными средствами, на сервер. На основе этих данных сервер может выполнять статистические расчеты, что дает возможность пользователям соответствующих самоуравновешивающихся транспортных средств получить инструкции по более эффективному использованию самоуравновешивающихся транспортных средств. Соответственно, пользователи соответствующих самоуравновешивающихся транспортных средств могут получать с сервера дополнительные сетевые данные и получать материалы, касающиеся более эффективного использования самоуравновешивающихся транспортных средств, например, о том, как более рационально выбирать скорость самоуравновешивающегося транспортного средства.
[00435] На шаге 162 принимают статистические результаты, полученных сервером, согласно запросу на получение.
[00436] На шаге 163 статистические результаты отображают и анализируют.
[00437] Как можно видеть из описанного выше варианта осуществления настоящего изобретения, пользовательский терминал может получать и отображать статистические результаты для самоуравновешивающегося транспортного средства, полученные с сервера, что дает пользователю возможность более эффективно управлять самоуравновешивающимся транспортным средством согласно статистическим результатам. Благодаря этому пользователь может управлять самоуравновешивающимся транспортным средством более безопасно и более эффективно, что также улучшает пользовательское восприятие.
[00438] Фиг. 17 представляет собой блок-схему, иллюстрирующую сценарий применения способа управления самоуравновешивающимся транспортным средством в соответствии с одним из примеров осуществления настоящего изобретения. В данном сценарии применения участвуют пользовательский терминал и самоуравновешивающееся транспортное средство. При этом могут присутствовать одно или более самоуравновешивающихся транспортных средств, и пользователь может выбирать одно или более из самоуравновешивающихся транспортных средств, полученных в результате поиска, и осуществлять управление ими.
[00439] Пользовательский терминал выполняет поиск самоуравновешивающихся транспортных средств по протоколу Bluetooth, например, могут быть найдены самоуравновешивающееся транспортное средство 1, самоуравновешивающееся транспортное средство 2 и самоуравновешивающееся транспортное средство 3.
[00440] Если пользователь выбрал самоуравновешивающееся транспортное средство 1, пользовательский терминал может установить соединение с самоуравновешивающимся транспортным средством 1 по протоколу Bluetooth.
[00441] Пользовательский терминал получает информацию о текущем состоянии самоуравновешивающегося транспортного средства 1.
[00442] Пользовательский терминал получает информацию о состоянии движения самоуравновешивающегося транспортного средства 1 по соединению Bluetooth.
[00443] Пользовательский терминал управляет самоуравновешивающимся транспортным средством 1 согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[00444] Интерфейс управления включает информацию о состоянии движения самоуравновешивающегося транспортного средства. В соответствии с иллюстрацией фиг. 18, скорость движения самоуравновешивающегося транспортного средства составляет 5 км/ч, оставшаяся энергия аккумулятора составляет 45%, оставшаяся дальность продолжения поездки составляет 20 км, а температура корпуса равна 45°.
[00445] Интерфейс управления включает приборную панель. В соответствии с иллюстрацией фиг. 18 на приборной панели пользователь может перемещать «перетаскиванием» черный шарик, что позволяет выполнять регулировку скорости самоуравновешивающегося транспортного средства. При этом расстояние между позицией черного шарика и центром приборной панели может отражать величину скорости. Чем больше это расстояние, тем большей будет величина скорости и тем выше будет скорость самоуравновешивающегося транспортного средства.
[00446] Интерфейс управления включает панель управления скоростью. В соответствии с иллюстрацией фиг. 18 пользователь может передвигать подвижную точку на панели управления скоростью, что позволяет ему выполнять регулировку максимальной движения самоуравновешивающегося транспортного средства. Значение 10 км/ч, отображаемое слева от панели управления скоростью, представляет собой максимальную скорость движения, назначенную пользователем.
[00447] Интерфейс управления включает также кнопку сопровождения на карте и кнопку ограничения скорости. В соответствии с иллюстрацией фиг. 9 пользователь может нажать на кнопку сопровождения на карте и получить сопровождение на карте, а также может нажать на кнопку ограничения скорости, в результате чего будет ограничена скорость. Также, на фиг. 19 дополнительно отображаются статистические данные по самоуравновешивающемуся транспортному средству, например: самоуравновешивающееся транспортное средство прошло 40 км, средняя скорость движения составляет 7 км/ч и т.п.
[00448] Интерфейс управления обеспечивает также метод быстрого доступа к камере. В соответствии с иллюстрацией фиг. 20 функция камеры может быть активирована при помощи нажатия на значение скорости (5 км/ч) в центре, при этом изображение окружающего пространства, захваченное камерой сотового телефона, будет отображаться непосредственно в интерфейсе управления в качестве фона. Это позволяет исключить ситуацию, в которой пользователь мог бы забыть о необходимости наблюдения за окружающим пространством во время использования терминала, благодаря чему может быть улучшено пользовательское восприятие.
[00449] В интерфейсе управления может отображаться направление, указываемое компасом системы. Например, «Север» на фиг. 20 указывает на то, что текущее направление движения самоуравновешивающегося транспортного средства - это «Север», благодаря чему пользователь может быть своевременно осведомлен о направлении движения самоуравновешивающегося транспортного средства, что снижает вероятность того, что он заблудится.
[00450] В соответствии с описанными выше вариантами осуществления способов управления самоуравновешивающимся транспортным средством в настоящем изобретении предложены также варианты осуществления устройства.
[00451] Фиг. 21 представляет собой блок-схему устройства управления самоуравновешивающимся транспортным средством в соответствии с одним из примеров осуществления настоящего изобретения, которое применяют в пользовательском терминале и сконфигурировано для выполнения способа управления самоуравновешивающимся транспортным средством, проиллюстрированного на фиг. 1. Устройство включает: модуль 211 соединения, модуль 212 получения и модуль 213 управления.
[00452] При этом модуль 211 соединения сконфигурирован для установления соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
[00453] модуль 212 получения сконфигурирован для получения информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению; и
[00454] модуль 213 управления сконфигурирован для управления самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[00455] Фиг. 22 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с другим примером осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, при этом данное устройство дополнительно включает модуль 221 определения скорости и модуль 222 передачи скорости.
[00456] Модуль 221 определения скорости сконфигурирован для обнаружения, присутствует ли событие регулировки скорости; и
[00457] модуль 222 передачи скорости сконфигурирован, когда обнаружено, что событие регулировки скорости присутствует, для передачи принятого значения регулировки скорости в самоуравновешивающееся транспортное средство по упомянутому соединению.
[00458] Фиг. 23 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 22, и при этом модуль 221 определения скорости включает: первый подмодуль 231 определения скорости или второй подмодуль 232 определения скорости.
[00459] При этом первый подмодуль 231 определения скорости сконфигурирован для обнаружения, присутствует ли событие операции, представляющей собой регулировку величины скорости на приборной панели в интерфейсе управления; и
[00460] второй подмодуль определения скорости сконфигурирован для обнаружения, присутствует ли событие операции, представляющей собой регулировку панели управления скоростью в интерфейсе управления.
[00461] Фиг. 24 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом модуль 211 соединения включает: подмодуль 241 поиска и первый подмодуль 242 соединения.
[00462] При этом подмодуль 241 поиска сконфигурирован для поиска самоуравновешивающегося транспортного средства по протоколу Bluetooth; и
[00463] первый подмодуль 242 соединения сконфигурирован для сопряжения Bluetooth-соединения с найденным самоуравновешивающимся транспортным средством с целью установления соединения.
[00464] Фиг. 25 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 24, и при этом первый подмодуль 242 соединения дополнительно включает: подмодуль 251 приема и второй модуль 252 соединения.
[00465] При этом подмодуль 251 приема сконфигурирован, когда количество найденных самоуравновешивающихся транспортных средств превышает единицу, для приема инструкции выбора, относящейся к самоуравновешивающемуся транспортному средству; и
[00466] второй модуль 252 соединения сконфигурирован для соединения с самоуравновешивающимся транспортным средством, выбранным пользователем согласно инструкции выбора.
[00467] Фиг. 26 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом модуль 212 получения включает: первый подмодуль 261 получения или второй подмодуль 262 получения.
[00468] При этом первый подмодуль 261 получения сконфигурирован для приема информации о состоянии движения самоуравновешивающегося транспортного средства, периодически передаваемой самоуравновешивающимся транспортным средством по упомянутому соединению; и
[00469] второй подмодуль 262 получения сконфигурирован для периодической передачи инструкции запроса состояния в самоуравновешивающееся транспортное средство и приема информации о состоянии движения самоуравновешивающегося транспортного средства, возвращенной самоуравновешивающимся транспортным средством согласно инструкции запроса состояния.
[00470] Фиг. 27 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом модуль 213 управления включает: подмодуль 271 отображения состояния движения и/или подмодуль 272 определения состояния движения.
[00471] При этом подмодуль 271 отображения состояния движения сконфигурирован для отображения информации о состоянии движения в интерфейсе управления; и
[00472] подмодуль 272 определения состояния движения сконфигурирован для обнаружения информации о состоянии движения и для выдачи предупреждения, когда информация о состоянии движения указывает на достижение соответствующего порогового состояния движения.
[00473] Фиг. 28 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 27, и при этом подмодуль 271 отображения состояния движения включает: первый подмодуль 281 отображения; и/или второй подмодуль 282 отображения; и/или третий подмодуль 283 отображения.
[00474] При этом первый подмодуль 281 отображения сконфигурирован для отображения скорости движения самоуравновешивающегося транспортного средства в интерфейсе управления;
[00475] второй подмодуль 282 отображения сконфигурирован для отображения оставшейся энергии аккумулятора самоуравновешивающегося транспортного средства в интерфейсе управления;
[00476] третий подмодуль 283 отображения сконфигурирован для отображения температуры корпуса самоуравновешивающегося транспортного средства в интерфейсе управления.
[00477] Фиг. 29 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 27, и при этом данное устройство дополнительно включает: модуль 291 вычисления дальности продолжения поездки и первый модуль отображения дальности продолжения поездки.
[00478] При этом модуль 291 вычисления дальности продолжения поездки сконфигурирован, когда информация о состоянии движения содержит данные об оставшейся энергии аккумулятора, для вычисления оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора; и
[00479] первый модуль отображения дальности 292 продолжения поездки сконфигурирован для отображения оставшейся дальности продолжения поездки в интерфейсе управления.
[00480] Фиг. 30 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 27, и при этом подмодуль 272 определения состояния движения включает: первый подмодуль 301 предупреждения; и/или второй подмодуль 302 предупреждения; и/или третий подмодуль 303 предупреждения.
[00481] При этом первый подмодуль 301 предупреждения сконфигурирован для выдачи предупреждения, когда оставшаяся энергия аккумулятора самоуравновешивающегося транспортного средства меньше пороговой энергии аккумулятора; и
[00482] второй подмодуль 302 предупреждения сконфигурирован для выдачи предупреждения, когда скорость движения самоуравновешивающегося транспортного средства выше, чем пороговая скорость; и
[00483] третий подмодуль 303 предупреждения сконфигурирован для выдачи предупреждения, когда температура корпуса самоуравновешивающегося транспортного средства выше, чем пороговая температура.
[00484] Фиг. 31 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом устройство дополнительно включает: модуль 311 определения состояния блокировки и модуль 312 сброса состояния блокировки.
[00485] При этом модуль 311 определения состояния блокировки сконфигурирован для определения, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки; и
[00486] модуль 312 сброса состояния блокировки сконфигурирован, когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, для сброса состояния блокировки самоуравновешивающегося транспортного средства.
[00487] Фиг. 32 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 31, и при этом модуль 312 сброса состояния блокировки включает: подмодуль 312 инструкции разблокировки.
[00488] При этом подмодуль 321 инструкции разблокировки сконфигурирован, когда обнаружена операция, инициирующая сброс блокировки, для передачи инструкции разблокировки в самоуравновешивающееся транспортное средство по упомянутому соединению, в результате чего самоуравновешивающееся транспортное средство сбрасывает состояние блокировки согласно принятой инструкции разблокировки.
[00489] Фиг. 33 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 31, устройство дополнительно включает: модуль 331 запроса информации об энергии аккумулятора, модуль 332 приема информации об энергии аккумулятора и модуль отображения информации об энергии аккумулятора.
[00490] При этом модуль 331 запроса информации об энергии аккумулятора сконфигурирован, когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, для передачи запроса на получение оставшейся энергии аккумулятора в самоуравновешивающееся транспортное средство;
[00491] модуль 332 приема информации об энергии аккумулятора сконфигурирован для приема информации об оставшейся энергии аккумулятора, возвращенной самоуравновешивающимся транспортным средством; и
[00492] модуль 333 отображения информации об энергии аккумулятора, сконфигурированный для отображения информации об оставшейся энергии аккумулятора в экранном интерфейсе блокировки.
[00493] Фиг. 34 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 33, и при этом устройство дополнительно включает: модуль 341 вычисления дальности продолжения поездки и второй модуль 342 отображения дальности продолжения поездки.
[00494] При этом модуль 341 вычисления дальности продолжения поездки сконфигурирован для вычисления оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора; и
[00495] второй модуль 342 отображения дальности продолжения поездки сконфигурирован для отображения оставшейся дальности продолжения поездки в экранном интерфейсе блокировки.
[00496] Фиг. 35 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 39 или фиг. 34, при этом модуль 291 вычисления дальности продолжения поездки и модуль 341 вычисления дальности продолжения поездки оба включают подмодуль 351 вычисления дальности продолжения поездки.
[00497] При этом подмодуль 351 вычисления дальности продолжения поездки сконфигурирован для получения оставшейся дальности продолжения поездки при помощи умножения оставшейся энергии аккумулятора на реконфигурируемый коэффициент корреляции.
[00498] Фиг. 36 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом устройство дополнительно включает: модуль 361 определения цвета световой сигнализации, модуль 362 приема цвета световой сигнализации и модуль 363 передачи цвета световой сигнализации.
[00499] При этом модуль 361 определения цвета световой сигнализации сконфигурирован для обнаружения, присутствует ли событие назначения цвета световой сигнализации для самоуравновешивающегося транспортного средства;
[00500] модуль 362 приема цвета световой сигнализации сконфигурирован, когда обнаружено событие назначения цвета световой сигнализации, для приема значения цвета световой сигнализации, выбранного пользователем; и
[00501] модуль 363 передачи цвета световой сигнализации сконфигурирован для передачи инструкции регулировки цвета, в которой содержится выбранное значение цвета световой сигнализации, в самоуравновешивающееся транспортное средство по упомянутому соединению.
[00502] Фиг. 37 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, при этом устройство дополнительно включает модуль 371 обнаружения камеры и модуль 372 обработки данных камеры.
[00503] при этом модуль 371 обнаружения камеры сконфигурирован для обнаружения, присутствует ли событие, инициирующее режим камеры; и
[00504] модуль 372 обработки данных камеры сконфигурирован, когда обнаружено событие, инициирующее режим камеры, для активации режима камеры и для отображения изображения, захваченного камерой, в качестве фона в интерфейсе управления.
[00505] Фиг. 38 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 37, и при этом модуль 372 обработки данных камеры включает подмодуль 381 вставки.
[00506] При этом подмодуль 381 вставки сконфигурирован для вставки изображения, захваченного камерой, ниже слоя интерфейса управления, предназначенного для взаимодействия с пользователем, в реальном времени.
[00507] Фиг. 39 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 37, и при этом устройство дополнительно включает модуль 391 фотографирования.
[00508] При этом модуль 391 фотографирования сконфигурирован, в режиме камеры, когда обнаружена операция, инициирующая фотографирование, для активации в камере функции фотографирования.
[00509] Фиг. 40 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом устройство дополнительно включает: модуль 401 обнаружения поиска транспортного средства, модуль 402 сопряжения Bluetooth и модуль 403 инструкции поиска транспортного средства.
[00510] При этом модуль 401 обнаружения поиска транспортного средства сконфигурирован для обнаружения, была ли принята операция поиска транспортного средства;
[00511] модуль 402 сопряжения Bluetooth сконфигурирован, когда была принята операция поиска транспортного средства, для поиска самоуравновешивающегося транспортного средства по протоколу Bluetooth и для сопряжения Bluetooth-соединения с самоуравновешивающимся транспортным средством; и
[00512] модуль 403 инструкции поиска транспортного средства сконфигурирован, когда происходит сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством, для передачи инструкции поиска транспортного средства в самоуравновешивающееся транспортное средство, в результате чего самоуравновешивающееся транспортное средство выполняет уведомление о поиске транспортного средства.
[00513] Фиг. 41 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 40, и при этом данное устройство дополнительно включает модуль 411 получения расстояния и модуль 412 отображения расстояния.
[00514] При этом модуль 411 получения расстояния сконфигурирован для получения расстояния до самоуравновешивающегося транспортного средства по Bluetooth-соединению с самоуравновешивающимся транспортным средством; и
[00515] модуль 412 отображения расстояния сконфигурирован для отображения расстояния до самоуравновешивающегося транспортного средства в интерфейсе управления.
[00516] Фиг. 42 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 40, и при этом данное устройство дополнительно включает: модуль 421 обнаружения дистанционного управления, модуль 422 обработки данных дистанционного управления и модуль 423 передачи информации дистанционного управления.
[00517] При этом модуль 421 обнаружения дистанционного управления сконфигурирован для обнаружения, присутствует ли событие, инициирующее движение с дистанционным управлением;
[00518] модуль 422 обработки данных дистанционного управления сконфигурирован, когда обнаружено, что присутствует событие, инициирующее движение с дистанционным управлением, для активации функции движения с дистанционным управлением и для входной информации о направлении движения и скорости движения, введенной пользователем; и
[00519] модуль 423 передачи информации дистанционного управления сконфигурирован для передачи заданной информации о направлении движения и скорости движения в самоуравновешивающееся транспортное средство с целью дистанционного управления движением самоуравновешивающегося транспортного средства.
[00520] Фиг. 43 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 42, и при этом модуль 422 обработки данных дистанционного управления включает: первый подмодуль 431 обнаружения и подмодуль 432 приема.
[00521] При этом первый подмодуль 431 обнаружения сконфигурирован для активации функции дистанционного управления движением и для обнаружения, присутствует ли событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства; и
[00522] подмодуль 432 приема, сконфигурированный, когда обнаружено, что присутствует событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства, для приема заданной информации о направлении движения и скорости движения, принятой от пользователя.
[00523] Фиг. 44 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 42, и при этом первый подмодуль 431 обнаружения включает второй подмодуль 441 обнаружения.
[00524] При этом второй подмодуль 441 обнаружения сконфигурирован для обнаружения, присутствует ли событие операции, представляющей собой регулировку угла направления на приборной панели в интерфейсе управления и регулировку расстояния от центра приборной панели в интерфейсе управления.
[00525] Фиг. 45 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 42, и при этом данное устройство дополнительно включает модуль 451 обнаружения ограничения скорости и модуль 452 обработки данных ограничения скорости.
[00526] При этом модуль 451 обнаружения ограничения скорости сконфигурирован для обнаружения, присутствует ли операция ограничения скорости самоуравновешивающегося транспортного средства; и
[00527] модуль 452 обработки данных ограничения скорости сконфигурирован, когда обнаружена операция ограничения скорости самоуравновешивающегося транспортного средства, для ограничения скорости движения, назначаемой пользователем, пределами диапазона ограничения скорости.
[00528] Фиг. 46 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 45, и при этом модуль 451 обнаружения ограничения скорости включает: подмодуль 461 обнаружения ограничения скорости.
[00529] При этом подмодуль 461 обнаружения ограничения скорости сконфигурирован для обнаружения, присутствует ли назначение максимальной скорости движения для панели управления скоростью в интерфейсе дистанционного управления движением.
[00530] Фиг. 47 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом данное устройство дополнительно включает модуль 471 обнаружения навигации и модуль 472 обработки данных навигации.
[00531] модуль 471 обнаружения навигации сконфигурирован для обнаружения, была ли принята операция, инициирующая навигацию; и
[00532] модуль 472 обработки данных навигации сконфигурирован, если принята операция, инициирующая навигацию, для вызова функции карты с целью получения и отображения информации навигации в реальном времени.
[00533] Фиг. 48 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 47, и при этом модуль 472 обработки данных навигации включает подмодуль 481 обработки данных навигации.
[00534] При этом подмодуль обработки данных навигации сконфигурирован для активации функции карты и для переключения на интерфейс навигации с целью получения и отображения текущего местоположения, а также данных навигации в реальном времени.
[00535] Фиг. 49 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом устройство дополнительно включает: модуль 491 обнаружения компаса, модуль 492 получения направления компаса, и модуль 493 отображения направления компаса.
[00536] При этом модуль 491 обнаружения компаса сконфигурирован для обнаружения, была ли принята операция, инициирующая компас;
[00537] модуль 492 получения направления компаса сконфигурированн, если обнаружена операция, инициирующая компас, для получения направления, указываемого компасом системы; и
[00538] модуль 493 отображения направления компаса сконфигурирован для отображения направления, указываемого компасом системы, в интерфейсе управления в реальном времени.
[00539] Фиг. 50 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом данное устройство дополнительно включает: модуль 501 обнаружения обновления, модуль 502 передачи инструкции обновления и модуль 503 обработки данных результатов обновления.
[00540] При этом модуль 501 обнаружения обновления сконфигурирован для обнаружения, была ли принята от пользователя операция, инициирующая удаленное обновление;
[00541] модуль 502 передачи инструкции обновления сконфигурирован, если от пользователя была принята операция, инициирующая удаленное обновление, для передачи инструкции обновления в самоуравновешивающееся транспортное средство по упомянутому соединению; и
[00542] модуль 503 обработки данных результата обновления сконфигурирован для приема результата обновления, возвращенного самоуравновешивающимся транспортным средством, и для отображение результата обновления в интерфейсе управления.
[00543] Фиг. 51 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом данное устройство дополнительно включает: модуль 511 обнаружения взаимодействия пользователей, и модуль 512 обработки данных взаимодействия пользователей.
[00544] При этом модуль 511 обнаружения пользовательского взаимодействия сконфигурирован для обнаружения, присутствует ли операция, инициирующая пользовательское взаимодействие; и
[00545] модуль 512 обработки данных пользовательского взаимодействия сконфигурирован, если обнаружено, что имеет место операция, инициирующая пользовательское взаимодействие, для установления соединения с сервером с целью передачи или приема информации взаимодействия.
[00546] Фиг. 52 представляет собой блок-схему устройства для управления самоуравновешивающимся транспортным средством в соответствии с еще одним из примеров осуществления настоящего изобретения, который применяют в пользовательском терминале. Данное устройство основано на устройстве, показанном на фиг. 21, и при этом данное устройство дополнительно включает: модуль 521 запроса на получение данных, модуль 522 приема статистических результатов и модуль 523 отображения статистических результатов.
[00547] При этом модуль 521 запроса на получение данных сконфигурирован для передачи на сервер запроса о пользователях множества самоуравновешивающихся транспортных средств с целью получения сетевых данных;
[00548] модуль 522 приема статистических результатов сконфигурирован для приема статистических результатов, полученных сервером, согласно запросу на получение; и
[00549] модуль 523 отображения статистических результатов сконфигурирован для отображения и анализа статистических результатов.
[00550] В соответствии с фиг. 21 в настоящем изобретении предложено также еще одно устройство управления самоуравновешивающимся транспортным средством, включающее:
[00551] процессор; и
[00552] память для хранения инструкций, исполняемых упомянутым процессором;
[00553] при этом процессор сконфигурирован для выполнения следующего:
[00554] установление соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
[00555] получение информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению; и
[00556] управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[00557] За конкретной информацией, касающейся реализации функций и операций, выполняемых в модулях описанных выше устройств, следует обращаться к описанию реализации соответствующих шагов в описанных выше способах, которое не будет приведено повторно.
[00558] За информацией о вариантах осуществления устройства, поскольку они соответствуют вариантам осуществления способа, следует обращаться к соответствующим фрагментам описания вариантов осуществления способа. Варианты осуществления устройства, рассмотренные выше, являются исключительно иллюстративными. Блоки, описанные как независимые друг от друга, не обязательно должны быть физически раздельными, при этом компоненты, проиллюстрированные в виде блоков не обязательно должны представлять собой физические блоки, и при этом они могут быть расположены в одном местоположении или могут быть распределены по множеству блоков в сети. Для достижения целей, стоящих перед настоящим изобретением, в соответствии с необходимостью может быть выбрана часть из этих модулей или все эти модули. Специалисты в данной области могут быть способны понять варианты осуществления настоящего изобретения и применить их на практике, не прилагая творческих усилий.
[00559] Фиг. 53 представляет собой блок-схему устройства 5300 (на стороне терминала) для управления самоуравновешивающимся транспортным средством в соответствии с одним из примеров осуществления настоящего изобретения. Например, устройство 5300 может представлять собой мобильный телефон с функциональностью маршрутизатора, компьютер, терминал цифрового вещания, устройство обмена сообщениями, игровую приставку, планшетный компьютер, медицинское устройство, тренажерное оборудование, карманный персональный компьютер и т.п.
[00560] На примере фиг. 53 устройство 5300 может включать в себя один или боле из следующих компонентов: процессорный компонент 5302, память 5304, компонент 5306 электропитания, мультимедийный компонент 5308, аудиокомпонент 5310, интерфейс 5312 ввода-вывода (input/output, I/O), измерительный компонент 5314 и компонент 5316 связи.
[00561] Процессорный компонент 5302, как правило, осуществляет общее управление функционированием устройства 5300, например операциями, связанными с отображением, телефонными вызовами, обменом данными, работой с камерой и операциями записи. Процессорный компонент 5302 может включать один или более процессоров 5320, исполняющих инструкции с целью выполнения всех шагов описанных выше способов или части этих шагов. Также, процессорный компонент 5302 может включать один или более модулей, обеспечивающих взаимодействие между процессорным компонентом 5302 и другими компонентами. Например, процессорный компонент 5302 может включать мультимедийный модуль, обеспечивающий взаимодействие между мультимедийным компонентом 5308 и процессорным компонентом 5302.
[00562] Память 5304 сконфигурирована для хранения различных типов данных с целью поддержки функционирования устройства 5300. Примерами подобных данных могут служить инструкции любых приложений или методов, исполняемых на устройстве 5300, контактные данные, данные телефонной книги, сообщения, изображения, видеоданные и т.п. Память 5304 может быть реализована с использованием энергозависимых или энергонезависимых устройств любого типа, а также их комбинаций, например статической памятью с произвольным доступом (static random access memory, SRAM), электрически перепрограммируемой памяти «только для чтения» (erasable programmable read-only memory, EPROM), программируемой памяти «только для чтения» (programmable read-only memory, PROM), памяти «только для чтения», магнитной памяти, флэш-памяти, магнитного или оптического диска.
[00563] Компонент 5306 электропитания обеспечивает электропитание различных компонентов устройства 5300. Компонент 5306 электропитания может включать систему управления электропитанием, один или более источников питания, а также любые другие компоненты, связанные с производством, управлением и распределением электрической энергии в устройстве 5300.
[00564] Мультимедийный компонент 5308 включает экран, который обеспечивает интерфейс вывода между устройством 5300 и пользователем. В некоторых из вариантов осуществления настоящего изобретения экран может включать дисплей на жидких кристаллах (liquid crystal display, LCD) и сенсорную панель (touch panel, TP). Если экран включает сенсорную панель, то в этом случае экран может быть реализован как сенсорный экран, принимающий сигналы ввода от пользователя. Сенсорная панель включает один или более датчиков касания, предназначенных для регистрации касаний, скольжений и других жестов на сенсорной панели. Датчики касания могут не только регистрировать границы операций касания или скольжения, но также измерять период времени и величину давления, связанные с этими операциями. В некоторых вариантах осуществления настоящего изобретения мультимедийный компонент 5308 включает фронтальную камеру и/или тыловую камеру. Фронтальная камера и/или тыловая камера могут принимать внешние мультимедийные данные, когда устройство 5300 находится в определенном режиме работы, например в режиме фотографирования или в режиме видеосъемки. Как фронтальная камера, так и тыловая камера могут представлять собой фиксированные системы оптических линз или иметь функциональность фокусировки и оптического зуммирования.
[00565] Аудиокомпонент 5310 сконфигурирован для вывода и/или ввода аудиосигналов. Например, аудиокомпонент 5310 включает микрофон ("MIC"), сконфигурированный для приема внешнего аудиосигнала, когда устройство 5300 находится в определенном режиме работы, например в режиме вызова, в режиме записи или в режиме распознавания голоса. Принятые аудиосигналы могут затем быть сохранены в памяти 5304 или переданы при помощи компонента 5316 связи. В некоторых из вариантов осуществления настоящего изобретения аудиокомпонент 5310 включает также громкоговоритель для вывода аудиосигналов.
[00566] Интерфейс 5312 ввода/вывода обеспечивает интерфейс между процессорным компонентом 5302 и модулями периферийных интерфейсов, например клавиатуры, поворотного-нажимного выключателя («колеса»), кнопок и т.п. Кнопки могут включать, без ограничения перечисленным, «домашнюю» кнопку, кнопку громкости, кнопку «пуск» или кнопку блокировки.
[00567] Измерительный компонент 5314 включает один или более датчиков, обеспечивающих оценку состояния различных элементов устройства 5300. Например, измерительный компонент 5314 может обнаруживать состояние «открыто» или «закрыто» устройства 5300, относительное расположение компонентов, например дисплея и клавиатуры устройства 5300, изменение положения устройства 5300 или одного из компонентов устройства 5300, присутствие или отсутствие контакта пользователя с устройством 5300, ориентацию или ускорение/замедление устройства 5300 и изменение температуры устройства 5300. Измерительный компонент 5314 может включать датчик близости, сконфигурированный для обнаружения присутствия приближенных объектов без физического контакта с ними. Измерительный компонент 5314 может также включать в себя светочувствительный датчик, например датчик изображений CMOS или CCD, для использования в приложениях формирования изображений. В некоторых из вариантов осуществления настоящего изобретения измерительный компонент 5314 может также включать в себя акселерометрический датчик, гироскопический датчик, магнитный датчик, датчик давления, УКВ-датчик или датчик температуры.
[00568] Компонент 5316 связи сконфигурирован для обеспечения связи, проводной или беспроводной, между устройством 5300 и другими устройствами. Устройство 5300 может осуществлять доступ к беспроводной сети, основанной на таких стандартах связи, как WiFi, 2G, или 3G, или их комбинации. В одном из примеров осуществления настоящего изобретения компонент 5316 связи принимает широковещательный сигнал или соответствующую широковещательную информацию от внешней широковещательной системы управления по широковещательному каналу. В одном из примеров осуществления настоящего изобретения компонент 5316 связи включает также модуль ближней бесконтактной связи (near field communication, NFC) для обеспечения связи в ближней зоне. Например, NFC-модуль может быть реализован на базе технологии радиочастотной идентификации (radio frequency identification, RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (infrared data association, IrDA), технологии сверхширокой полосы пропускания (ultra-wideband, UWB), технологии Bluetooth (ВТ) или других технологий.
[00569] В примерах осуществления настоящего изобретения устройство 5300 может быть реализовано с использованием одной или более заказных интегральных схем (ASIC), цифровых сигнальных процессоров (DSP), цифровых устройств обработки сигналов (digital signal processing devices, DSPD), программируемых логических устройств (programmable logic devices, PLD), электрически программируемых вентильных матриц (field programmable gate arrays, FPGA), в процессорах, контроллерах, микроконтроллерах, микропроцессорах или других электронных блоках, предназначенных для исполнения описанных выше способов.
[00570] В примерах осуществления настоящего изобретения предложен также машиночитаемый носитель для хранения данных, который включает инструкции, например содержащиеся в памяти 5304 и исполняемые процессором 5320 в устройстве 5300 с целью выполнения описанных выше способов. К примеру, машиночитаемый носитель для хранения данных может представлять собой память ROM, RAM, CD-ROM, магнитную ленту, гибкий диск, оптическое запоминающее устройство для хранения данных и т.п.
[00571] Машиночитаемый носитель для хранения данных, при исполнении инструкций на этом носителе при помощи процессора мобильного терминала, обеспечивает выполнение этим мобильным терминалом способа управления самоуравновешивающимся транспортным средством.
Способ включает:
[00572] установление соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
[00573] получение информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению; и
[00574] управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства.
[00575] Специалистами в данной области техники, по прочтении описания или после практического применения изобретения, описанного в настоящем документе, могут быть найдены другие варианты его осуществления. Настоящая заявка призвана охватить все изменения, применения или модификации настоящего изобретения, не отступающие от его основного замысла, включая все отступления от настоящего описания, которые известны на существующем уровне техники или традиционно применяются в данной области техники. Приведенное описание и примеры следует считать исключительно иллюстративными, при этом истинный объем и сущность настоящего изобретения заданы приведенной ниже формулой изобретения.
[00576] Нужно понимать, что настоящее изобретение не ограничено конкретной конструкцией, описанной выше и проиллюстрированной на приложенных чертежах, а также, что в пределах объема настоящего изобретения может быть выполнено множество различных модификаций и изменений. Предполагается, что объем настоящего изобретения ограничен только приложенной формулой изобретения.
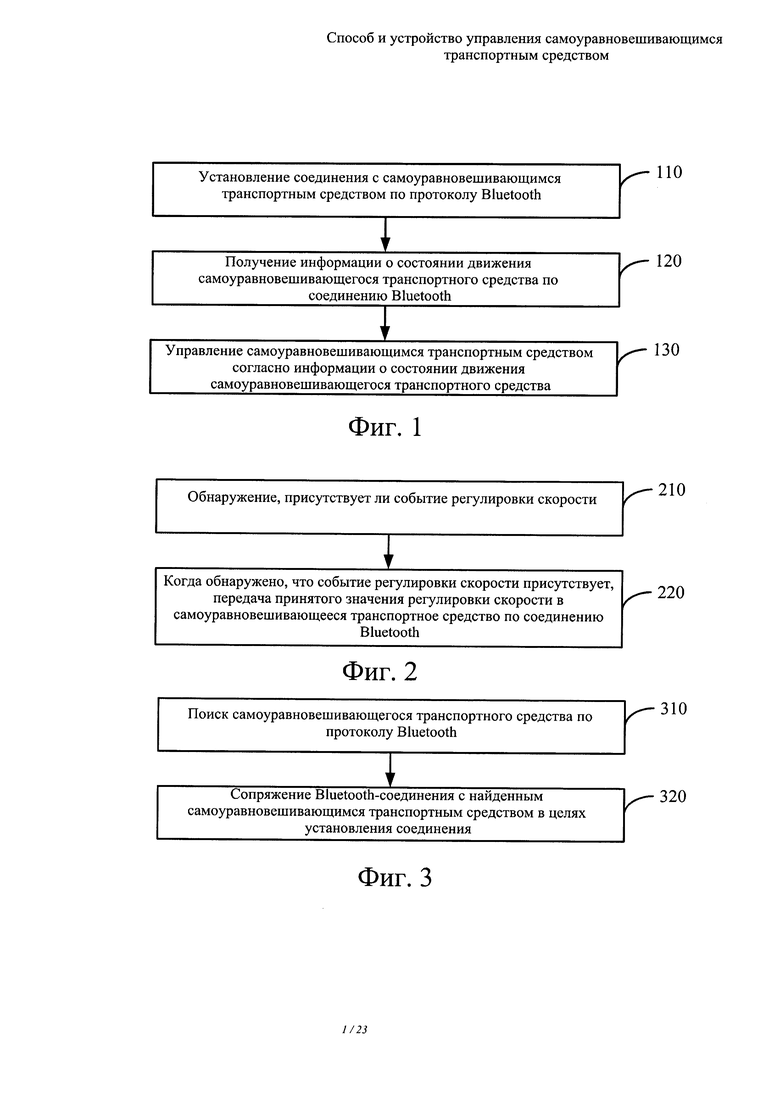
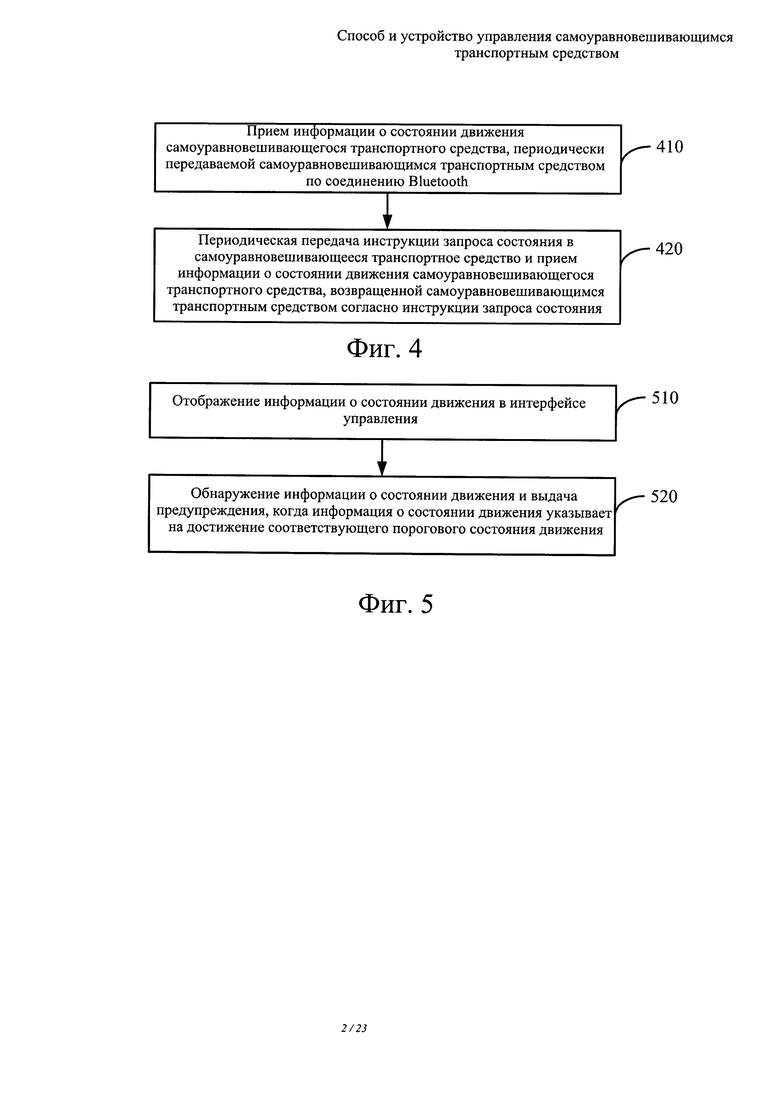









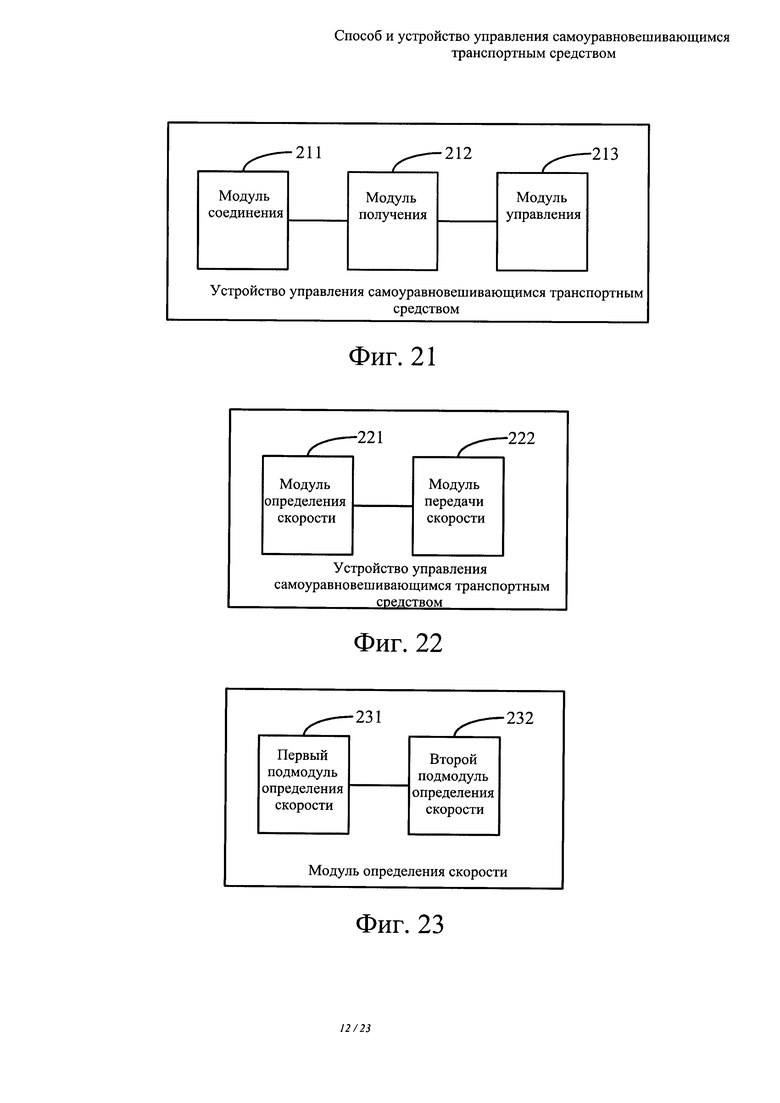
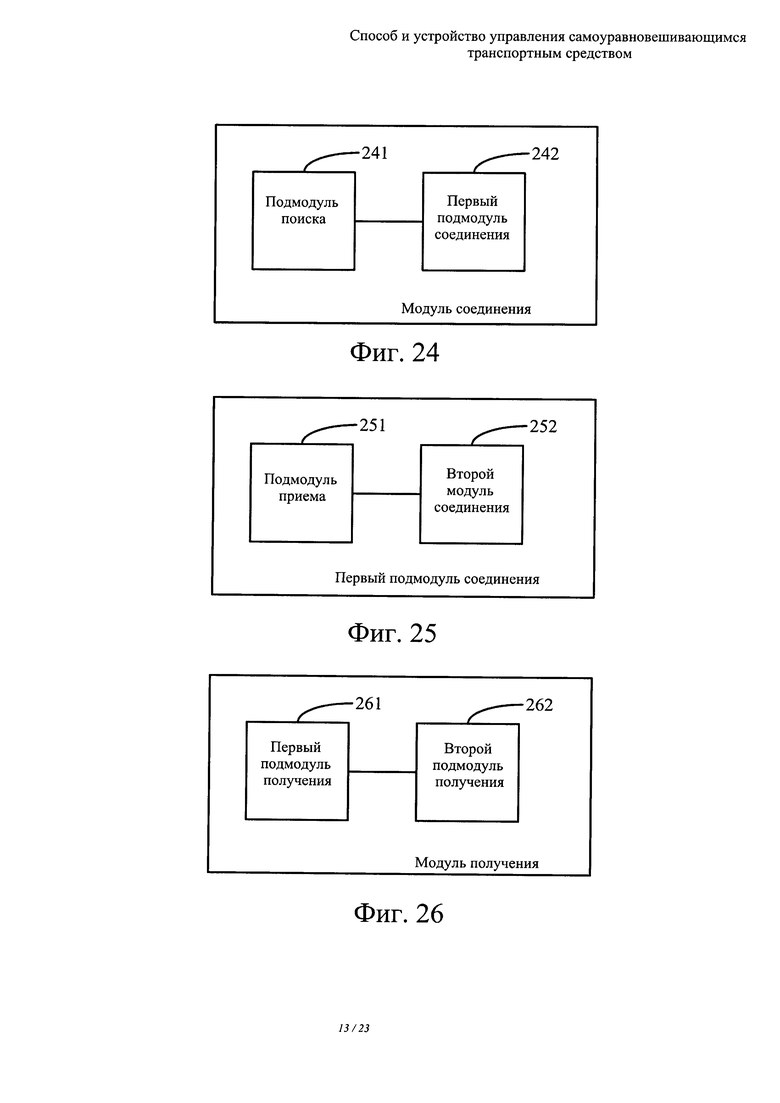

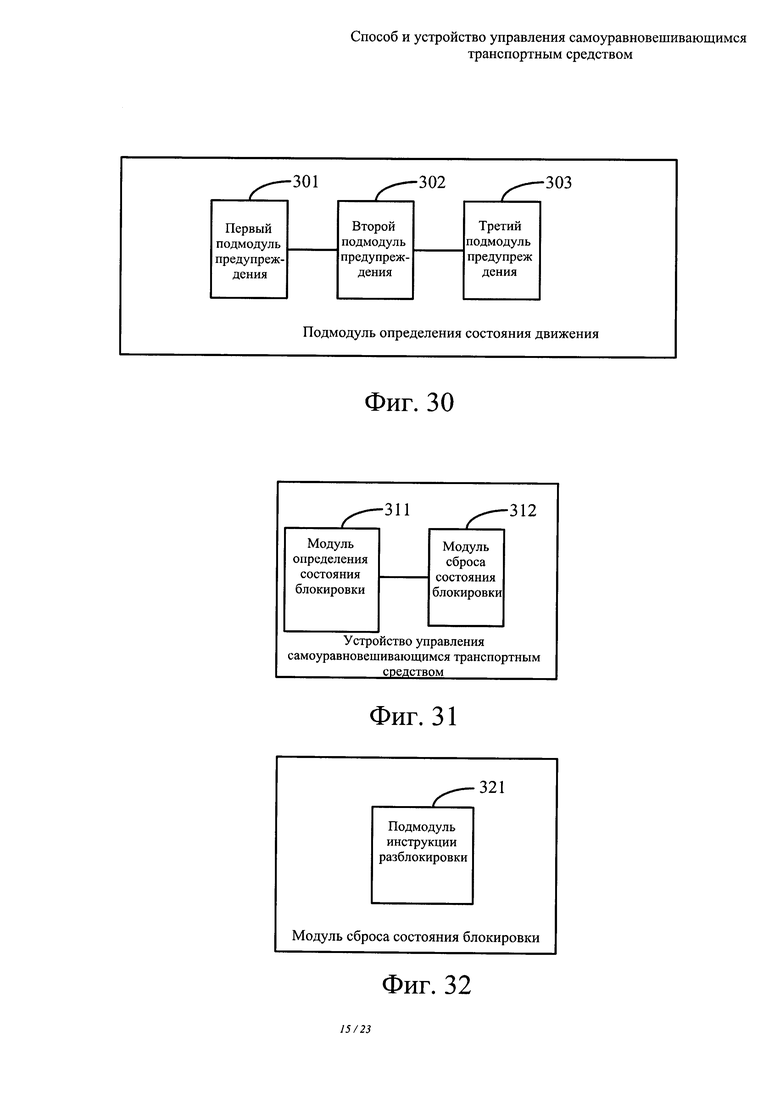




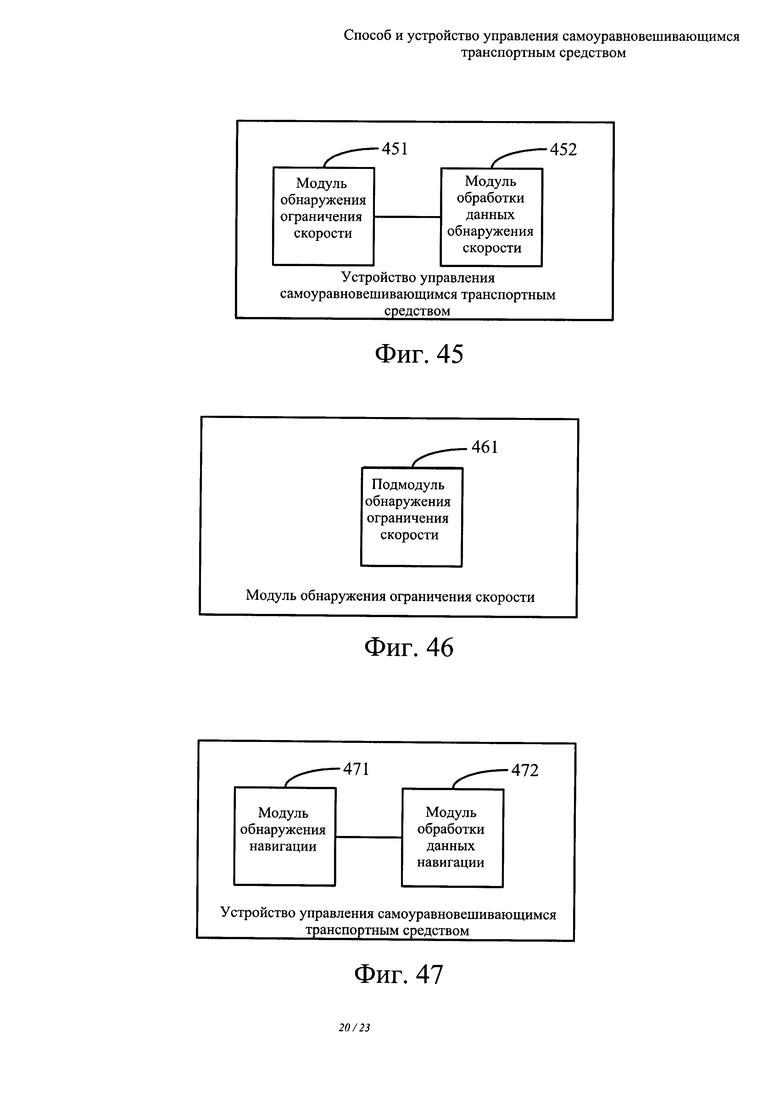
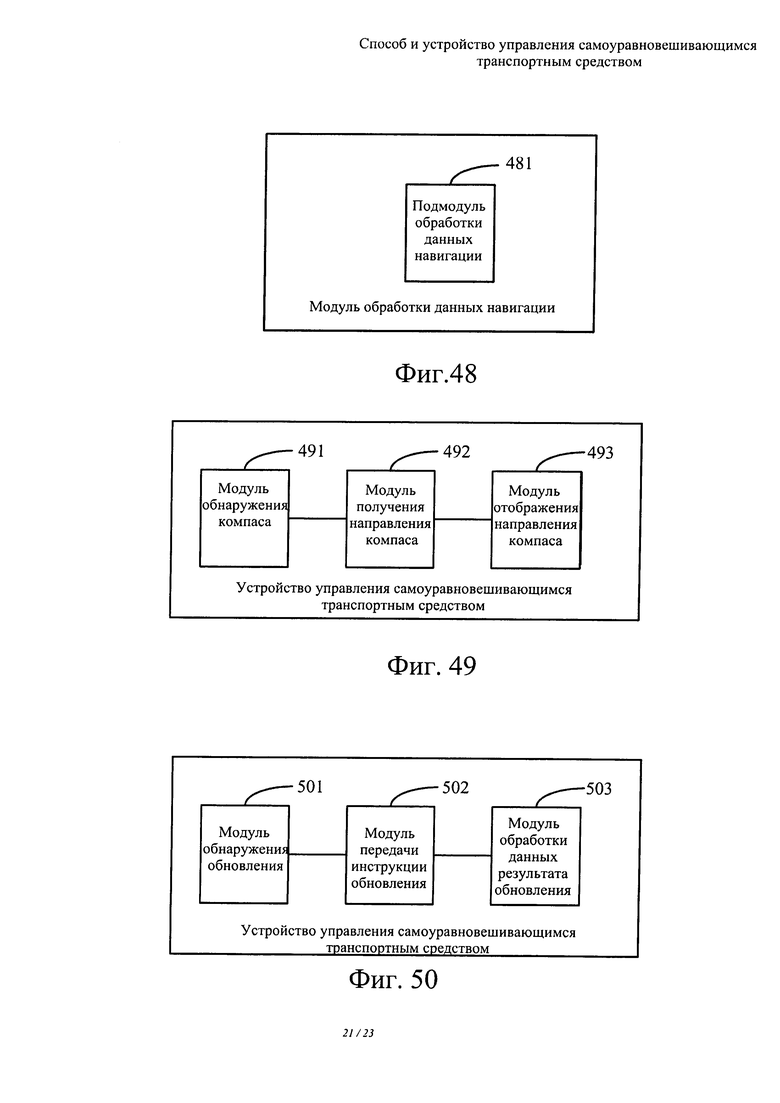


Группа изобретений относится к области технологий сетевых коммуникаций, в частности к способам управления самоуравновешивающимися транспортными средствами. Способ управления самоуравновешивающимся транспортным средством с помощью мобильного терминала включает установление соединения с транспортным средством по протоколу Bluetooth, получение информации о состоянии движения транспортного средства, управление транспортным средством согласно информации о состоянии движения транспортного средства, обнаружение, присутствует ли событие, инициирующее режим камеры, и, когда обнаружено событие, инициирующее режим камеры, активацию режима камеры и отображение изображения, захваченного камерой. Устройство управления самоуравновешивающимся транспортным средством включает модуль соединения, модуль получения, модуль управления, модуль обнаружения, модуль обработки данных камеры. Достигается поддержание равновесия транспортного средства. 2 н. и 21 з.п. ф-лы, 53 ил.
1. Способ управления самоуравновешивающимся транспортным средством с помощью мобильного терминала, включающий:
установление соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
получение информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению;
управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства;
обнаружение, присутствует ли событие, инициирующее режим камеры; и,
когда обнаружено событие, инициирующее режим камеры, активацию режима камеры, и отображение изображения, захваченного камерой в качестве фона в интерфейсе управления.
2. Способ по п. 1, также включающий:
обнаружение, присутствует ли событие регулировки скорости; и,
когда обнаружено, что событие регулировки скорости присутствует, передачу принятого значения регулировки скорости в самоуравновешивающееся транспортное средство по упомянутому соединению.
3. Способ по п. 1, в котором управление самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства включает:
отображение информации о состоянии движения в интерфейсе управления; и/или
обнаружение информации о состоянии движения и выдача предупреждения, когда информация о состоянии движения указывает на достижение соответствующего порогового состояния движения.
4. Способ по п. 3, в котором отображение информации о состоянии движения в интерфейсе управления также включает следующее:
когда информация о состоянии движения содержит данные об оставшейся энергии аккумулятора, вычисление оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора; и
отображение оставшейся дальности продолжения поездки в интерфейсе управления.
5. Способ по п. 1, также включающий:
определение, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки; и
когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, сброс состояния блокировки самоуравновешивающегося транспортного средства.
6. Способ по п. 5, также включающий:
когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, передачу запроса на получение оставшейся энергии аккумулятора в самоуравновешивающееся транспортное средство;
прием оставшейся энергии аккумулятора, возвращенной самоуравновешивающимся транспортным средством; и
отображение оставшейся энергии аккумулятора в экранном интерфейсе блокировки.
7. Способ по п. 6, также включающий:
вычисление оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора и отображение оставшейся дальности продолжения поездки в экранном интерфейсе блокировки.
8. Способ по п. 4 или 6, в котором вычисление оставшейся дальности продолжения поездки согласно оставшейся энергии аккумулятора включает
получение оставшейся энергии аккумулятора при помощи умножения оставшейся энергии аккумулятора на реконфигурируемый коэффициент корреляции.
9. Способ по п. 1, в котором отображение изображения, захваченного камерой, в качестве фона в интерфейсе управления включает
вставку изображения, захваченного камерой, ниже слоя интерфейса управления, предназначенного для взаимодействия с пользователем, в реальном времени.
10. Способ по п. 1, также включающий
в режиме камеры, когда обнаружена операция, инициирующая фотографирование, активацию в камере функции фотографирования.
11. Способ по п. 1, также включающий:
обнаружение, принята ли операция поиска транспортного средства;
когда принята операция поиска транспортного средства, поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth, и сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством; и
когда происходит сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством, передачу инструкции поиска транспортного средства в самоуравновешивающееся транспортное средство, в результате чего самоуравновешивающееся транспортное средство выполняет уведомление о поиске транспортного средства.
12. Способ по п. 11, в котором поиск самоуравновешивающегося транспортного средства по протоколу Bluetooth и сопряжение Bluetooth-соединения с самоуравновешивающимся транспортным средством дополнительно включает:
получение расстояния до самоуравновешивающегося транспортного средства по Bluetooth-соединению с самоуравновешивающимся транспортным средством; и
отображение расстояния до самоуравновешивающегося транспортного средства в интерфейсе управления.
13. Способ по п. 11, также включающий:
обнаружение, присутствует ли событие, инициирующее движение с дистанционным управлением;
когда обнаружено, что присутствует событие, инициирующее движение с дистанционным управлением, активацию функции движения с дистанционным управлением и прием заданной информации о направлении движения и скорости движения, которая была введена; и
передачу заданной информации о направлении движения и скорости движения в самоуравновешивающееся транспортное средство для дистанционного управления движением самоуравновешивающегося транспортного средства.
14. Способ по п. 13, в котором активация функции дистанционного управления движением и прием заданной информации о направлении движения и скорости движения, которая была введена, включает:
активацию функции дистанционного управления движением и обнаружение, присутствует ли событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства; и
когда обнаружено, что присутствует событие назначения направления движения и скорости движения самоуравновешивающегося транспортного средства, прием заданной информации о направлении движения и скорости движения, которая была введена.
15. Способ по п. 13, также включающий:
обнаружение, присутствует ли операция ограничения скорости самоуравновешивающегося транспортного средства; и
когда обнаружена операция ограничения скорости самоуравновешивающегося транспортного средства, ограничение скорости движения в пределах диапазона ограничения скорости.
16. Способ по п. 1, также включающий:
обнаружение, принята ли операция, инициирующая навигацию; и
если принята операция, инициирующая навигацию, вызов функции
карты для получения и отображения информации навигации в реальном времени.
17. Способ по п. 1, также включающий:
обнаружение, принята ли операция, инициирующая компас;
если обнаружена операция, инициирующая компас, получение направления, указываемого компасом системы; и
отображение направления, указываемого компасом системы, в интерфейсе управления в реальном времени.
18. Способ по п. 1, также включающий:
обнаружение, присутствует ли операция, инициирующая пользовательское взаимодействие; и
если обнаружено, что имеет место операция, инициирующая пользовательское взаимодействие, установление соединения с сервером для передачи или приема информации взаимодействия.
19. Способ по п. 1, также включающий:
передачу, на сервер, запроса о пользователях множества самоуравновешивающихся транспортных средств для получения сетевых данных;
прием статистических результатов, полученных сервером, согласно запросу на получение; и
отображение и анализ статистических результатов.
20. Устройство управления самоуравновешивающимся транспортным средством, включающее:
модуль соединения, сконфигурированный для установления соединения с самоуравновешивающимся транспортным средством по протоколу Bluetooth;
модуль получения, сконфигурированный для получения информации о состоянии движения самоуравновешивающегося транспортного средства по упомянутому соединению;
модуль управления, сконфигурированный для управления самоуравновешивающимся транспортным средством согласно информации о состоянии движения самоуравновешивающегося транспортного средства;
модуль обнаружения камеры, сконфигурированный для обнаружения, присутствует ли событие, инициирующее режим камеры; и
модуль обработки данных камеры, сконфигурированный, когда обнаружено событие, инициирующее режим камеры, для активации режима камеры и для отображения изображения, захваченного камерой, в качестве фона в интерфейсе управления.
21. Устройство по п. 20, также включающее:
модуль определения скорости, сконфигурированный для обнаружения, присутствует ли событие регулировки скорости; и
модуль передачи скорости, сконфигурированный, когда обнаружено, что событие регулировки скорости присутствует, для передачи принятого значения регулировки скорости в самоуравновешивающееся транспортное средство по упомянутому соединению.
22. Устройство по п. 20, в котором модуль управления включает: подмодуль отображения состояния движения и/или подмодуль определения состояния движения; при этом
подмодуль отображения состояния движения сконфигурирован для отображения информации о состоянии движения в интерфейсе управления; и
подмодуль определения состояния движения сконфигурирован для обнаружения информации о состоянии движения и для выдачи предупреждения, когда информация о состоянии движения указывает на достижение соответствующего порогового состояния движения.
23. Устройство по п. 20, также включающее:
модуль определения состояния блокировки, сконфигурированный для определения, находится ли самоуравновешивающееся транспортное средство в состоянии блокировки; и
модуль сброса состояния блокировки, сконфигурированный, когда определено, что самоуравновешивающееся транспортное средство находится в состоянии блокировки, для сброса состояния блокировки самоуравновешивающегося транспортного средства.
| CN 204210654 U, 18.03.2015 | |||
| CN 203888925 U, 22.10.2014 | |||
| CN 204323601 U, 13.05.2015 | |||
| US 2015045992 A1, 12.02.2015 | |||
| ГОРИЗОНТАЛЬНАЯ КАРУСЕЛЬНАЯ МАШИНА ДЛЯ КОКИЛЬНОГО ЛИТЬЯ | 1941 |
|
SU62726A1 |

