Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам и комплексам авианаблюдения для них, и может применяться для фото- и видеоразведки в режиме реального времени, а также биологической, химической и ядерной разведки местности и т.п., в том числе для облета периметров охраняемых объектов, территории охраняемых объектов, передачи данных в системы и комплексы защиты объектов, силам охраны объекта.
Известен комплекс авианаблюдения (патент RU №2015067 [1]), содержащий беспилотные летательные аппараты с автономным электроприводом, передвижной контейнер и систему дистанционного управления. Беспилотные летательные аппараты выполнены в виде вертикально взлетающих платформ с четырьмя жестко закрепленными двигателями с воздушными винтами и снабжены системой автоматической посадки.
Недостатками известного малогабаритного комплекса авианаблюдения [1] являются недостаточная устойчивость и динамичность беспилотных летательных аппаратов в режиме полета и в режиме «зависания» в воздухе по причине использования только четырех электродвигателей, а также высокие массогабаритные показатели комплекса авианаблюдения и высокие требования эффективности силовой установки по причине наличия автономной электрической системы для зарядки беспилотных летательных аппаратов электроэнергией, выполненной в виде блока электродвигателя внутреннего сгорания, генератора или маховичного накопителя энергии.
Известен также комплекс авианаблюдения (RU №2232104 [2]), содержащий беспилотный летательный аппарат с электродвигателями и воздушными винтами, радиоуправляемой бортовой системой обеспечения полета, бортовой приемопередающей аппаратурой и устройством видеонаблюдения в видимом и инфракрасном спектре с передатчиком изображения, а также мобильный пульт контроля и управления с наземной приемопередающей аппаратурой, приемником видеоданных и радионавигационной системой управления беспилотным летательным аппаратом, при этом радиоуправляемая бортовая система обеспечения полета беспилотного летательного аппарата и радионавигационная система управления беспилотным летательным аппаратом снабжены корректируемыми посредством глобальной навигационной системы инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами. Недостатками известного беспилотного летательного аппарата и комплекса авианаблюдения для него [2] является недостаточная устойчивость и динамичность беспилотных летательных аппаратов в режиме полета и в режиме «зависания» по причине использования только четырех электродвигателей в конструкции винтовой вертикально взлетающей платформы летательных аппаратов, а также наличие дополнительных расходов электроэнергии вследствие использования для управления движением взлетающей платформы двух рулевых машинок, которые изменяют вектор тяги каждого воздушного винта с электродвигателем относительно корпуса беспилотного летательного аппарата.
Задачей также известного технического решения [2] является создание беспилотного летательного аппарата и комплекса авианаблюдения для него, обладающих повышенной устойчивостью при маневрировании и «зависании», возможностью пилотирования в автоматическом режиме по заданному маршруту на основании сигналов спутниковой навигационной системы, возможностью осуществления стабилизированного видеонаблюдения в видимом и инфракрасном диапазонах, а также увеличенной продолжительностью и дальностью полета вследствие более эффективного использования электроэнергии за счет использования шести электродвигателей с воздушными винтами с электронно регулируемым числом оборотов, жестко закрепленных в вершинах воображаемого многоугольника на несущем каркасе беспилотного летательного аппарата, а также за счет использования маршрутного вычислительного устройства и системы видеонаблюдения в видимом и инфракрасном диапазонах на гиростабилизированном подвесе в комплексе авианаблюдения.
Известны также аналогичные технические решения (патенты RU №123393 U1, 27.12.2012 [3], №2518440 С1 [4]).
Поставленная задача, в известном техническом решении [4] решена путем создания беспилотного летательного аппарата, содержащего несущий каркас и электродвигатели с воздушными винтами, связанные с аккумуляторной батареей, отличающегося тем, что на несущем каркасе в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с воздушными винтами с контролируемой частотой вращения, связанных с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством и блоком приема и обработки данных спутниковой навигационной системы.
При этом диаметрально расположенные электродвигатели имеют встречное направление вращения, а маршрутное вычислительное устройство выполнено с возможностью управления частотой вращения электродвигателей, при этом обеспечения горизонтального положения летательного аппарата по сигналам инерциального измерительного устройства, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам блока приема и обработки данных спутниковой навигационной системы для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку. Электродвигатели зафиксированы в одной плоскости и имеют электронные регуляторы оборотов.
Известный беспилотный летательный аппарат также содержит батарею питания бортовой системы обеспечения полета и силовую аккумуляторную батарею питания электродвигателей. Конструкция несущего каркаса содержит объединяющую несущую пластину, к которой прикреплены, по меньшей мере, шесть расходящихся от нее штанг, защита несущей пластины и шасси, причем один конец каждой штанги прикреплен к объединяющей несущей пластине, а другой конец к креплению электродвигателя. Силовая аккумуляторная батарея питания электродвигателей расположена на шасси.
Известный беспилотный летательный аппарат также содержит прикрепленный к шасси поворотно-наклонный гидростабилизированный подвес, выполненный с возможностью установки средств видеонаблюдения и аэрофотосъемки и связанный с блоком управления поворотно-наклонным гидростабилизированным подвесом, который связан с маршрутным вычислительным устройством.
Инерциальное измерительное устройство в микроисполнении содержит акселерометр, магнитометр, микрогироскоп и барометр.
Маршрутное вычислительное устройство, инерциальное измерительное устройство и блок приема и обработки данных спутниковой навигационной системы образуют бортовую систему обеспечения полета, бортовая система обеспечения полета расположена на объединяющей несущей пластине.
Известный беспилотный летательный аппарат также содержит трекер и систему аварийной посадки, связанные с маршрутным вычислительным устройством.
Поставленная задача в известном техническом решении [4] также решена путем создания комплекса авианаблюдения, содержащего беспилотный летательный аппарат и мобильный пульт контроля и управления, отличающегося тем, что беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с воздушными винтами с контролируемой частотой вращения, связанных с аккумуляторной батареей и с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством, мобильным пультом контроля и управления, системой видеонаблюдения и блоком приема и обработки данных спутниковой навигационной системы, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, а маршрутное вычислительное устройство выполнено с возможностью управления частотой вращения электродвигателей, при этом обеспечения горизонтального положения летательного аппарата по сигналам инерциального измерительного устройства, обеспечения изменения курса и высоты летательного аппарата по сигналам телеметрии с мобильного пульта контроля и управления, обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам блока приема и обработки данных спутниковой навигационной системы для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, а также с возможностью обеспечения визуального контроля за полетом по сигналам видеоданных системы видеонаблюдения.
При этом маршрутное вычислительное устройство, инерциальное измерительное устройство, система видеонаблюдения и блок приема и обработки данных спутниковой навигационной системы образуют бортовую систему обеспечения полета, бортовая система обеспечения полета расположена на объединяющей несущей пластине, система видеонаблюдения содержит устройство видеонаблюдения в видимом и инфракрасном спектре и передатчик видеоданных, расположенные в бортовой системе обеспечения полета, а также приемник видеоданных, расположенный в мобильным пульте контроля и управления, устройство видеонаблюдения установлено на поворотно-наклонном гидростабилизированном подвесе, бортовая система обеспечения полета содержит приемно-передающую радиосистему, связанную с маршрутным вычислительным устройством, и выполненную с возможностью обмена данными по радиоканалу с мобильной приемно-передающей радиосистемой, расположенной в мобильным пульте контроля и управления, мобильный пульт контроля и управления содержит портативный персональный компьютер, подключенный к мобильной приемно-передающей радиосистеме, блоку приема и обработки сигналов спутниковой навигационной системы, приемнику видеоданных, пульту управления беспилотным летательным аппаратом и мобильному индивидуальному устройству отображения видеоданных.
Комплекс авианаблюдения также содержит трекер и систему аварийной посадки, связанные с маршрутным вычислительным устройством.
Недостатком известного технического решения является ограниченная широта наблюдений.
Известно также мобильное средство радиационной разведки (Богатов С.А. Мобильное средство радиационной разведки на базе беспилотного летательного аппарата MD4-1000. / А.С. Богатов, С.Л. Гаврилов, С.А. Ткаченко и др. // Специальная техника. - 2012. №6, с. 16-22 [5]), которое содержит измерительный блок, позволяющий выполнять измерения мощности дозы в широком диапазоне (10-7 Зв/ч до 10-1 Зв/ч). В состав измерительного блока входит спектрометр на основе детектора NaI(Tl) размерами 31×31 мм, а также два счетчика Гейгера-Мюллера. Масса блока составляет 0,6 кг. Габаритные размеры 111×90×126 мм. Полет производится по программно заданной траектории, во время которого производится набор спектров с экспозицией 1 с. Спектры записываются в память измерительного блока с привязкой по данным GPS. На пульт управление в режиме полета передается счет в выбранном энергетическом окне и счет от одного из счетчиков Гейгера-Мюллера. Считывание спектров из памяти измерительного блока производится после приземления БПЛА. Обработка и интерпретация данных с использованием разработанных алгоритмов позволяет: определить мощность дозы, получить распределение интенсивности излучения точечного источника, определить параметры равномерного поверхностного загрязнения.
Использование радиоканала в представленных устройствах как способа передачи данных о радиационной обстановке от блоков детектирования на пульт управления накладывает ограничения на дальность движения носителей аппаратуры и, как следствие, на площадь обследуемой территории. Дальность действия радиоканала зависит от мощности передатчика и, как правило, не превышает нескольких километров при прямой видимости и отсутствии помех.
Применение более мощного радиомодема в блоке детектирования, на первый взгляд, позволяет решить эту проблему. Но при этом существенно возрастет энергопотребление, что нивелирует выигрыш в дальности за счет предполагаемого увеличения мощности радиопередатчика, так как сократится время работы блока детектирования в целом. Установка более мощной и, следовательно, более массивной аккумуляторной батареи приведет к увеличению массы и габаритов блока детектирования и отрицательно скажется, например, на летных характеристиках БПЛА.
Известен также беспилотный дозиметрический комплекс измерения гамма-излучения (БПДК), (Калиберда И.В. Дистанционные измерения радиационного загрязнения территорий с помощью беспилотного дозиметрического комплекса. / И.В. Калиберда, Ф.Ф. Брюхань // Вестник МГСУ. 2012. №4, с. 186-194 [6]), который предназначен для выявления зон радиоактивного загрязнения местности, измерения спектрального состава и мощности экспозиционной дозы гамма-излучения, поиска точечных источников гамма- и нейтронного излучения, а также отображения и документирования данных радиационной обстановки. В качестве дозиметра выступает блок детектирования гамма-излучения БДФИ-02. Детектирующей частью блока является сцинтиллятор, выполненный на основе кристалла Nal размерами 45×45 мм. Бортовое оборудование, кроме детектора-дозиметра, включает в себя датчик спутниковой навигации GPS, видеокамеру, радиоканал с выносной антенной, блок аккумуляторов и защиту от внешнего гамма-излучения. Общая масса бортового оборудования составляет 4,8 кг. Данное оборудование устанавливалось на радиоуправляемый вертолет «Caliber-ZG» фирмы «Kyosho» (Япония), способный нести полезную нагрузку массой до 5 кг.
Недостатками известного БПДК является большая масса бортового оборудования, ограничивающая ее применение в широком спектре аппаратов легкого класса, так как средняя масса полезной нагрузки таких аппаратов обычно находится в пределах 2,5-3 кг. Размеры детектора для обнаружения источников гамма-излучения требуют полетов на малой высоте с небольшой скоростью. Так, например, поиск источника Cs-137 проводился на высоте 10 метров при скорости полета 10 км/ч. Это приводит к значительному увеличению времени поиска и опасности столкновения с естественными и искусственными преградами при полетах на малых высотах. Как и в представленных аналогах, связь между БПДК и пультом управления осуществляется по радиоканалу.
Известны также аналогичные устройства (патенты RU №123393 U1, 27.12.2012 [7], RU №105474 U1, 10.06.2011 [8], заявка US №2013114787 А1, 09.03.2013 [9]).
Известные аналоги создавались применительно к конкретным моделям БПЛА вертолетного типа с вертикальным взлетом и посадкой, возможностью зависания и управлением в ручном режиме. В качестве детекторов использовались сцинтилляторы NaI(Tl), выполненные в виде равносторонних цилиндров, где высота была равна диаметру оснований. Блоки детектирования также были выполнены в виде цилиндров и устанавливались под фюзеляжем, нижнем (рабочим) основанием к исследуемой поверхности. При этом габариты блоков детектирования были практически сравнимы с габаритами самих фюзеляжей БПЛА.
Для БПЛА легкого класса самолетного типа, запускаемых при помощи катапульты и перемещающихся на больших скоростях (от 60 км/ч), необходима более универсальная конструкция блока детектирования, учитывающая аэродинамику и габариты фюзеляжа БПЛА и вместе с этим позволяющая обеспечивать регистрацию радиоактивности гамма-излучателей в объектах окружающей среды.
Максимальная дальность полета таких БПЛА превышает десятки километров, что делает практически невозможной связь между блоком детектирования и пультом управления по радиоканалу, и, как следствие, теряется оперативность при сборе информации о радиационной обстановке на местности.
Известно также аналогичное устройство, направленное на увеличение области поиска источников гамма-излучения в режиме реального времени за счет повышения дальности связи между установленным на БПЛА блоком детектирования и пультом управления, а также адаптация детектирующих элементов к высоким скоростям полета БПЛА с целью обеспечения высоких обнаружительных характеристик (патент RU №2565335 С2, 20.10.2015 [10]).
Данная задача решается за счет того, что в качестве средства связи между блоком детектирования и пультом управления используется беспроводной GSM-канал, реализуемый при помощи модуля GSM, установленного в блоке детектирования, и GSM-модемом, подключенным к пульту управления, представляющим собой персональный компьютер. Обеспечение высоких обнаружительных характеристик реализуется применением сцинтилляционных счетчиков NaI(Tl), выполненных в виде круглых прямых цилиндров и ориентированных основанием перпендикулярно направлению полета БПЛА. Выбор количества и размеров кристаллов является решением задачи оптимизации между эффективностью регистрации гамма-квантов (за что отвечает диаметр основания), максимальной эффективной площадью детектора (за что отвечает боковая поверхность) и минимальными массогабаритными характеристиками блока детектирования. Оптимальные результаты показала конфигурация из двух сцинтилляторов NaI(Tl) с высотой в 2,6 раза больше диаметра основания.
Такая форма и расположение детекторов увеличивают эффективную площадь регистрации гамма-излучения за счет использования боковой поверхности в качестве рабочей и позволяют минимизировать габариты блока детектирования, что существенным образом сказывается на его аэродинамических характеристиках.
Техническим результатом является расширение области поиска локальных источников гамма-излучения в режиме реального времени с применением БПЛА легкого класса, оборудованных блоком детектирования гамма-излучения, а также адаптация конструкции блока детектирования к высоким скоростям полета БПЛА при сохранении высоких обнаружительных характеристик.
Дополнительным преимуществом являются малый вес и габариты блока детектирования, позволяющие устанавливать данный блок практически на все существующие БПЛА легкого класса.
Однако при относительно низких значениях энергии гамма-квантов (≤1,5 МэВ) наиболее вероятным процессом взаимодействия гамма-излучения с материалом детектора, лежащим в основе гамма-спектрометрических измерений, является фотоэффект. С ростом энергии гамма-квантов вероятность фотоэффекта снижается. Начиная с энергии гамма-квантов меньше 1,02 МэВ, становится возможным образование электронно-позитронных пар, и вероятность этого процесса быстро возрастает с увеличением энергии гамма-квантов.
Под действием высокоэнергетических гамма-квантов в поле ядра атома среды, в которой происходит распространение гамма-излучения, образуются электронно-позитронные пары, суммарная кинетическая энергия которых равна энергии первичных гамма-квантов минус 1,02 МэВ - сумма масс покоя электрона и позитрона. Электрон и позитрон тратят свою кинетическую энергию на ионизацию и возбуждение атомов и молекул среды. Растратив всю свою кинетическую энергию, позитрон аннигилирует с любым электроном той же среды. В результате аннигиляции возникают два аннигилляционных гамма-кванта с энергиями по 0,511 МэВ, разлетающихся под углом 180° друг по отношению к другу, что позволяет использовать парные спектрометры.
Из уровня техники также известны парные гамма-спектрометры для измерения высокоэнергетического гамма-излучения, способные выделять из общего числа регистрируемых событий только связанные с образованием электронно-позитронных пар (West Y.I. Measurement of low-energy gamma-ray pair cross-sections in scintillators using a scintillation pair spectrometer. Phys. Rev., 1956, V. 101, no. 3, pp. 915-921 [11], Avignone F.T., Khalil A.E. Cross-section for the production of electron-positron pairs by 1,064 Mev photons of germanium. Phys. Rev. A, 1981, V. 24, no. 6, pp. 2920-2924 [12]).
При этом три детектора подключаются к схеме тройных совпадений, отсеивающей большую часть мешающих процессов, регистрируемых каждым из отдельных детекторов.
В экспериментальной ядерной физике при работе с относительно высокими активностями пучок первичных гамма-квантов через коллиматор направляется на центральный кристалл сравнительно небольших размеров, чтобы образующиеся в этом кристалле в результате аннигиляции позитрона аннигилляционные гамма-кванты могли покинуть этот кристалл с большей вероятностью. Для регистрации аннигилляционных гамма-квантов с энергиями по 0,511 МэВ с хорошей эффективностью применяются сравнительно большие кристаллы, расположенные симметрично по отношению к центральному кристаллу. Таким образом, практически одновременно с образованием электронно-позитронных пар в центральном кристалле происходит регистрация аннигилляционных гамма-квантов боковыми кристаллами, в основном, с полным поглощением их энергии.
Вероятность регистрации парным гамма-спектрометром случайных тройных совпадений - крайне маловероятный процесс, т.е. парный гамма-спектрометр не повышает эффективность регистрации высокоэнергетических гамма-квантов как таковую, а существенно снижает вероятность регистрации других процессов взаимодействия гамма-квантов с материалом кристаллов детектора.
При работе в экспедиционных условиях, когда уровень активностей относительно невысок, пользоваться вышеописанной системой детекторов с коллиматором, существенно ухудшающим геометрические условия измерений, нецелесообразно. Основным средством для подавления мешающих процессов в этом случае является схема тройных совпадений с дифференциальными дискриминаторами в каждом из боковых каналов регистрации аннигилляционных гамма-квантов, рассчитанных на пропускание только импульсов, соответствующих энергии 0,511 МэВ.
Пластинчатый детектор должен состоять по меньшей мере из трех одинаковых параллельных пластин, средняя из которых будет выполнять роль центральной, а боковые будут регистрировать аннигилляционные гамма-кванты. В принципе для повышения общей эффективности прибора возможно увеличение количества параллельных пластин до произвольного числа. При этом все пластины (кроме двух крайних) будут регистрировать как высокоэнергетические первичные гамма-кванты, так и аннигилляционные. Электронная система коммутации обеспечит работу каждой триады соседних пластин в режиме тройных совпадений, так что общая эффективность такого спектрометра будет равна (n-2)Е, где n - общее количество пластин, а Е - эффективность каждой отдельной пластины по отношению к первичному гамма-излучению.
Ранние варианты парных гамма-спектрометров (например, [11]) предназначались, в основном, для изучения самого процесса образования пар под действием гамма-квантов различных энергий в материалах с широким диапазоном значений атомных номеров Z.
Поэтому в этих приборах достаточно интенсивные пучки гамма-квантов от соответствующих источников поступали на центральный кристалл через свинцовый коллиматор, чтобы исключить попадание первичного гамма-излучения на боковые сцинтилляторы, предназначенные только для одновременной регистрации аннигилляционных гамма-квантов с энергиями по 0,511 МэВ [11, 12].
Известен также детектор для регистрации ионизирующих излучений (патент на полезную модель RU №105474 U1, 10.06.2011 [13].
Детектор для регистрации ионизирующих излучений [13] содержит сцинтилляционный датчик для регистрации излучений, находящееся с ним в оптическом контакте фотоприемное устройство и блок электронной обработки сигналов. В качестве сцинтилляционного датчика используют сцинтилляционный спектрометрический кристалл CsI:T1 или LaBr3:Ce, чувствительный к гамма-излучению, в качестве фотоприемного устройства используют PIN-фотодиод. Детектор также содержит дополнительный сцинтилляционный датчик, чувствительный к нейтронам, и находящиеся с ним в оптическом контакте сместитель спектра из кристалла ортогерманата висмута и дополнительный PIN-фотодиод, детектор дополнительно содержит коммуникационный модуль, связанный с блоком электронной обработки сигналов. При этом дополнительный сцинтилляционный датчик, чувствительный к нейтронам, выполнен в виде сборки из трех элементов, причем центральный элемент выполнен из кристалла, или кристалловолокон L(Y, Gd)BO:Ce, или из пластинок 6Li-содержащего силикатного стекла, два элемента, окружающие центральный элемент, выполнены из пластика или стильбена.
Данное устройство позволяет достичь технического результата, который заключается в компактности, малом весе, регистрации гамма-излучения и нейтронов, возможности создания связанной сети радиационных детекторов и передачи информации удаленному пользователю.
Задачей предлагаемого технического решения является расширение функциональных возможностей беспилотного летательного аппарата с одновременным повышением достоверности при выполнении видеосъемки и измерении радиоактивности гамма-излучателей в объектах окружающей среды.
Поставленная задача также решается за счет того, что в комплекс авианаблюдения, который содержит беспилотный летательный аппарат и мобильный пульт контроля и управления, при этом беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с воздушными винтами с контролируемой частотой вращения, связанных с аккумуляторной батареей и с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством, мобильным пультом контроля и управления, системой видеонаблюдения и блоком приема и обработки данных спутниковой навигационной системы, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, а маршрутное вычислительное устройство выполнено с возможностью управления частотой вращения электродвигателей, при этом обеспечения горизонтального положения летательного аппарата по сигналам инерциального измерительного устройства, обеспечения изменения курса и высоты летательного аппарата по сигналам телеметрии с мобильного пульта контроля и управления, обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам блока приема и обработки данных спутниковой навигационной системы для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, а также с возможностью обеспечения визуального контроля за полетом по сигналам видеоданных системы видеонаблюдения, дополнительно введены радиодоплеровская система измерения скорости и высоты полета беспилотного летательного аппарата, электронная навигационная картографическая система, доплеровский гидроакустический лаг, соединенные с маршрутным вычислительным устройством.
При этом радиодоплеровская система измерения скорости и высоты полета беспилотного летательного аппарата включает четыре приемопередатчика, два из которых размещены на крыльях беспилотного летательного аппарата и выполнены двухлучевыми, а два других приемопередатчика размещены в носовой и кормовой оконечностях беспилотного летательного аппарата и выполнены однолучевыми, в доплеровский гидроакустический лаг, включающий гидроакустическую антенну, приемопередающее устройство, устройство выделения доплеровских частот, вычислительное устройство, индикатор, синхронизатор, в том числе устройства первичной обработки (приемные усилители, схемы оценивания доплеровского смещения, АЦА, ЦАП) и вторичной обработки (расчет компонент вектора скорости, учет дестабилизирующих факторов, ведение временной диаграммы, АРУ, АРМ, интерфейс с другими средствами навигации), в котором выполняют разделение четырех лучей, формируемых гидроакустической антенной, введены восемь кольцевых буферов, на которые поступают выходные коды АЦП для разделения четырех лучей, формируемых гидроакустической антенной, блок компенсации по углам качек, рыскания и вертикальной составляющей скорости носителя доплеровского гидроакустического лага и течений на глубинах плавания, блок управления буферной памятью, которые своими выходами соединены с вычислительным устройством, а в блоке детектирования гамма-излучения в составе сцинтилляционного детектора, контроллера с установленным модулем GPS, аккумуляторной батареи, в котором для связи между блоком детектирования и пультом дистанционного управления используется GSM-канал, образованный размещенным в блоке детектирования модулем GSM и установленным в пульте управления GSM-модемом, при этом сцинтилляционный детектор ориентирован основанием перпендикулярно направлению полета беспилотного летательного аппарата, сцинтилляционный детектор выполнен как минимум из трех одинаковых сцинтилляционных пластин, размером 40×30×15 мм и выполненных из германата висмута и кремниевых фотоэлектронных умножителей.
Сущность предлагаемого технического решения поясняется чертежами (фиг. 1-3).
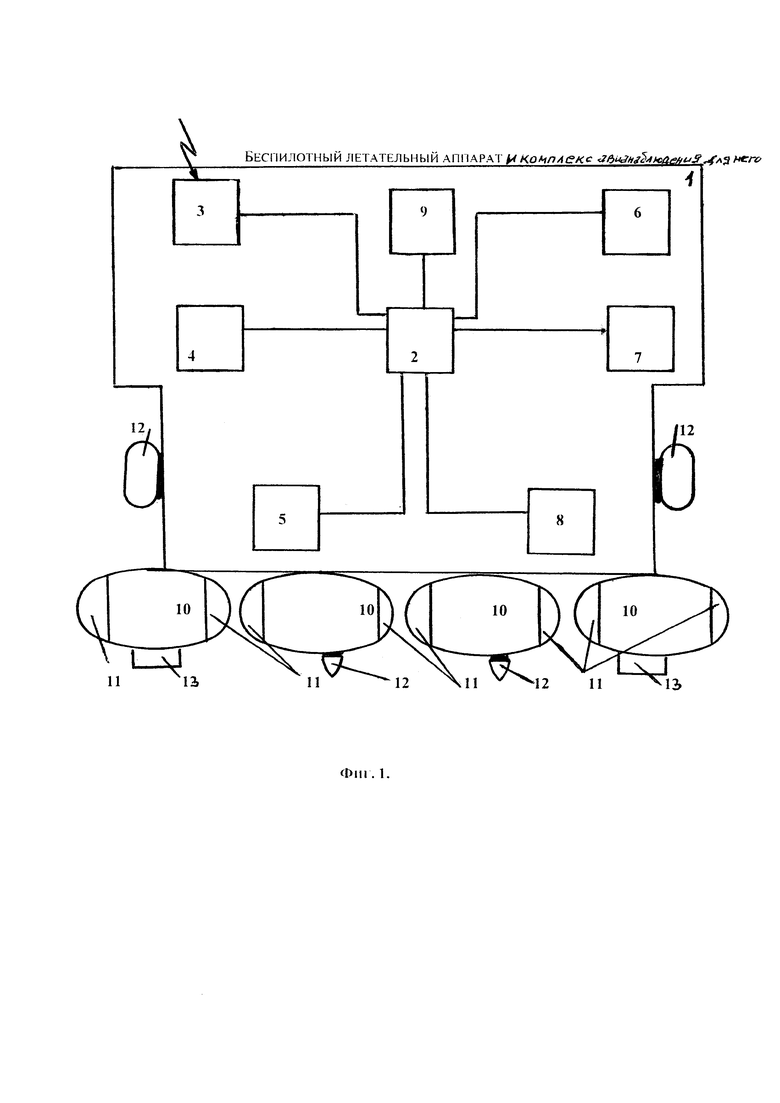
Фиг. 1 - беспилотный летательный аппарат 1 содержит маршрутное вычислительное устройство 2, связанное с блоком 3 приема и обработки сигналов спутниковой навигационной системы, инерциальным измерительным устройством 4 (содержащим акселерометр, магнитометр и барометр), трекером 5, системой 6 аварийной посадки, блоком 7 управления поворотно-наклонного гиростабилизированного подвеса, сонаром 8, шестью электродвигателями 9 с воздушными винтами, четыре гидролыжи 10, расположенными, соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата и на оконечностях каждого крыла, при этом каждая гидролыжа 10 выполнена в виде гондолы, снабженной впускными и выпускными клапанами 11, гидролыжи, расположенные, соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата снабжены вертикальными движителями 12, а гидролыжи, расположенные на оконечностях каждого крыла снабжены горизонтальными движителями 13.
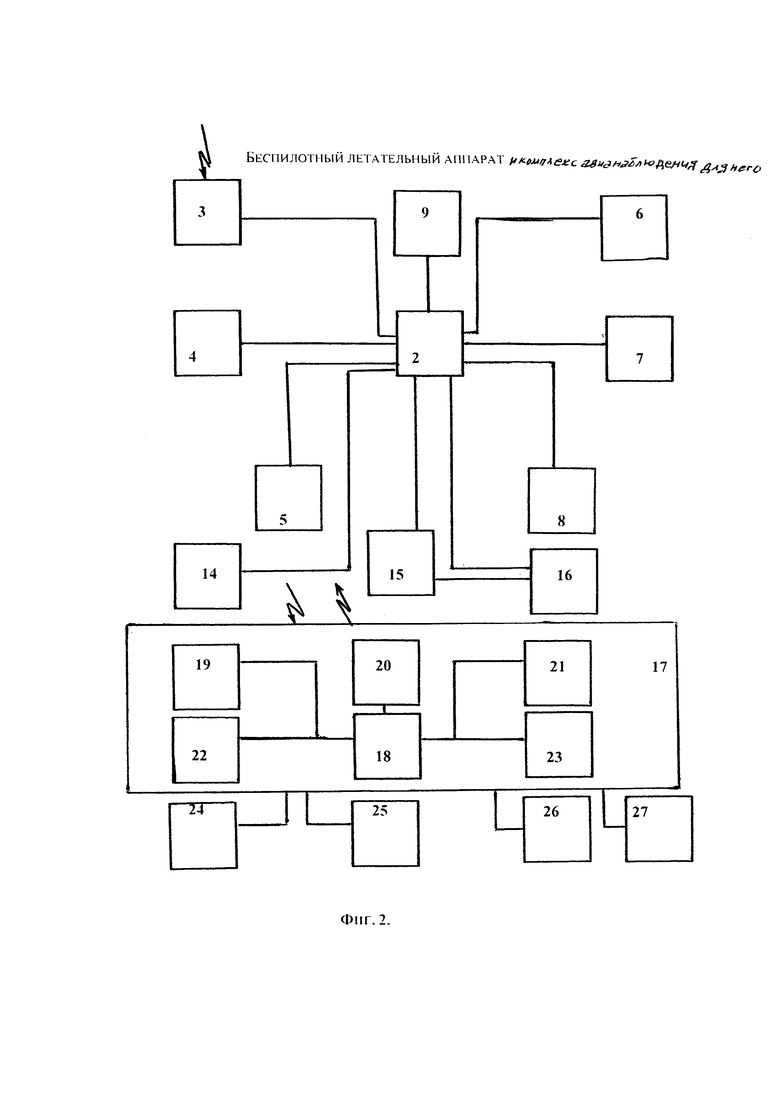
Беспилотный летательный аппарат 1, входящий в состав комплекса авианаблюдения (фиг. 2) дополнительно содержит приемно-передающую радиосистему 14, устройство 15 видеонаблюдения в видимом и инфракрасном спектре и передатчик видеоданных 16. Мобильный пульт контроля и управления 17 содержит портативный персональный компьютер 18, связанный с мобильной приемно-передающей радиосистемой 19, приемником видеоданных 20, монитором 21, специализированным пультом 22 управления беспилотным летательным аппаратом, мобильным индивидуальным устройством 23 отображения видеоданных, радиодоплеровскую систему 24 измерения скорости и высоты полета беспилотного летательного аппарата, электронную навигационную картографическую систему 25, доплеровский гидроакустический лаг 26, блок 27 детектирования гамма-излучения.
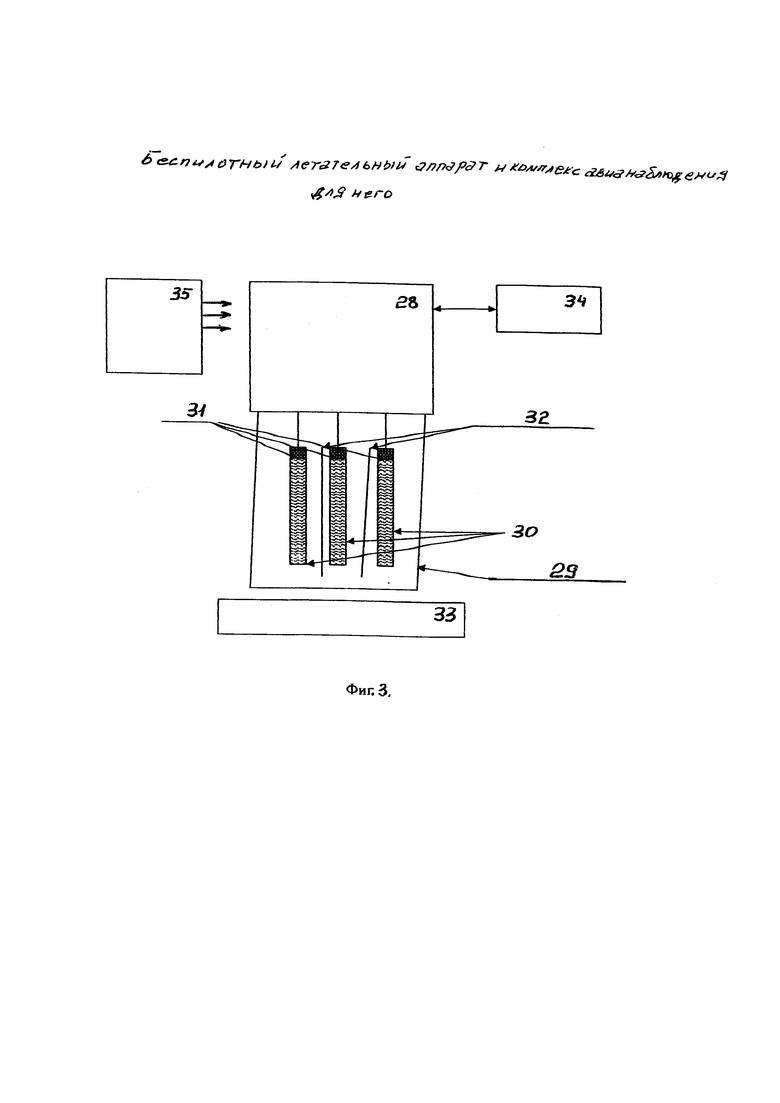
Фиг. 3 - блок - схема парного гамма-спектрометра, где позициями обозначены: 28 - электронный блок усиления, коммутации, дискриминации и амплитудного анализа, 29 - корпус детектора, 30 - сцинтилляционные пластины, 31 - кремневые фотоумножители, 32 - светоизоляция сцинтилляционных пластин 31, 33 - объект регистрации гамма-излучения, 34 - персональный компьютер, 35 - аккумуляторная батарея.
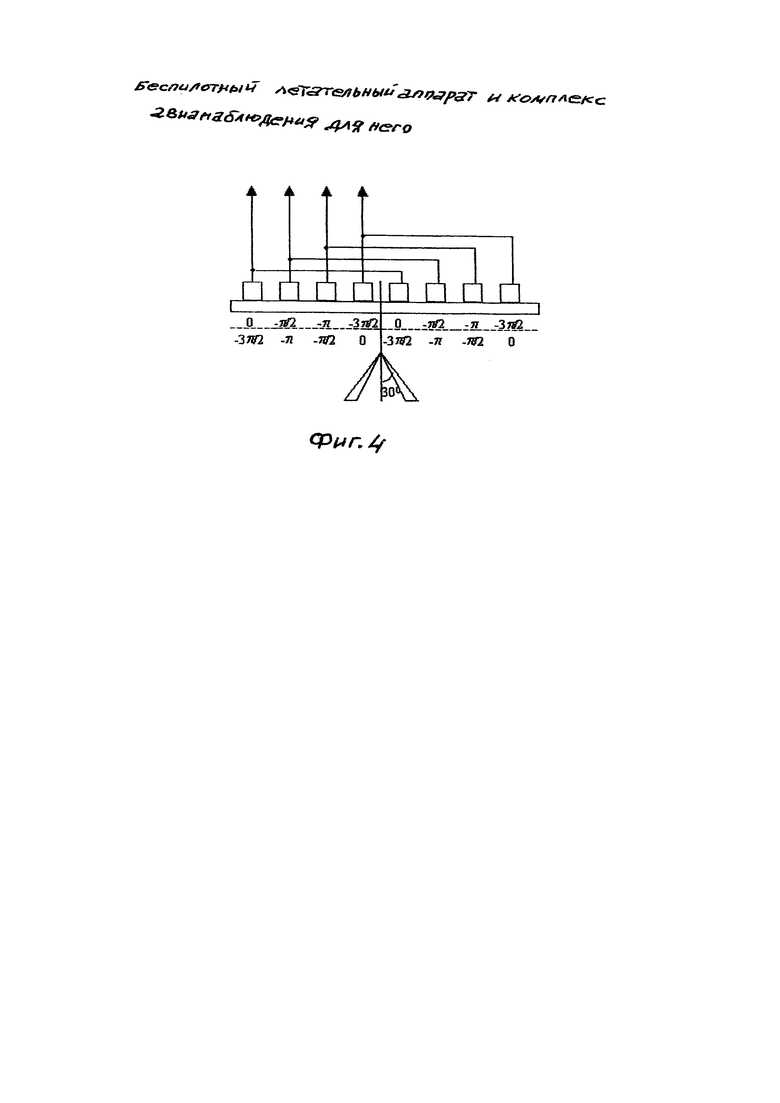
Фиг. 4 - схема приемной антенны на плоских линейных решетках с восемью группами преобразователей доплеровского гидроакустического лага.
Маршрутное вычислительное устройство 2 может состоять из микропроцессора, буферных регистров, запоминающих устройств, интерфейсных схем.
Система электропитания БПЛА (беспилотного летательного аппарата) содержит два независимых источника: аккумуляторную батарею питания бортовой системы обеспечения полета и силовую аккумуляторную батарею питания электродвигателей.
Как и в прототипе [10], конструкция несущего каркаса беспилотного летательного аппарата 1 может состоять из шасси, штанг, креплений электродвигателей 9 с воздушными винтами, объединяющей несущей пластины и защиты верхней пластины. К шасси прикреплен поворотно-наклонный гиростабилизированный подвес. На несущей пластине размещена бортовая система обеспечения полета беспилотного летательного аппарата 1 и аккумуляторная батарея питания бортовой системы обеспечения полета, на шасси размещена силовая аккумуляторная батарея питания электродвигателей. На поворотно-наклонном гидростабилизированном подвесе размещено устройство 11 видеонаблюдения.
Электродвигатели 9 расположены в вершинах воображаемого правильного шестиугольника на несущей конструкции повышенной прочности. Электродвигатели 9, расположенные диаметрально, имеют встречное направление вращения, при этом маршрутное вычислительное устройство 2 выполняет следующие функции: непосредственно управляет частотой электродвигателей 9 и на основе сигналов инерциального измерительного устройства 4 обеспечивает горизонтальное положение беспилотного летательного аппарата 1; по сигналам спутниковой навигационной системы определяет координаты и передает их на мобильный пульт контроля и управления, по сигналам телеметрии с мобильного пульта 13 контроля и управления изменяет курс и высоту беспилотного летательного аппарата 1; а также на основе заложенной в него программы в отсутствие связи с мобильным пультом 13 контроля и управления на основании координат спутниковой навигационной системы GPS/ГЛОНАСС выполняет в автоматическом режиме полетное задание с возвращением на взлетную площадку, и обеспечивает визуальный контроль за полетом по сигналам передаваемых видеоданных, а также по сигналам мобильного пульта контроля и управления изменяет положение системы видеонаблюдения в видимом и инфракрасном спектре, установленной на гиростабилизированный подвес и передает видеоданные на мобильный пульт контроля и мониторинга, а также на монитор, входящий в его состав.
Грузоподъемность беспилотного летательного аппарата составляет 2-5 кг, что в свою очередь позволяет устанавливать на него оборудование на гиростабилизированный подвес.
Конструктивно беспилотный летательный аппарат состоит из нескольких плат, рамы и бесколлекторных электродвигателей. Детали смонтированы так, чтобы обеспечить стабильность полета и неподвижное положение в режиме «висения» (зависания) в воздухе. Габаритные размеры беспилотного летательного аппарата: длина, ширина, высота с учетом вращающихся плоскостей приблизительно 1×1×0,65 м.
Беспилотный летательный аппарат 1 управляется при помощи пульта управления 17 как радиоуправляемая модель. Гиростабилизированный подвес имеет независимое управление. Дальность устойчивого ручного управления на частоте 2,4 ГГц составляет до 1-1,5 км практически ограничивается визуальной досягаемостью аппарата. Дальность передачи телеметрии на частоте 900 МГц на расстояние 700 м в прямой видимости. Дальность контролирования беспилотного летательного аппарата может быть увеличена при передаче с него видеосигнала в режиме реального времени, а при наличии глобального позиционирования есть возможность почти не следить за аппаратом. Беспилотный летательный аппарат выполнен с возможностью самостоятельного полета в заданную точку кратчайшим маршрутом.
При емкости аккумулятора 5-8 Ач, высота подъема может достигать нескольких сотен метров, что позволяет решать задачи ведения аэрофотосъемки, мониторинга лесных пожаров, транспортировки малогабаритных грузов, осмотра труднодоступных объектов, применения в сельскохозяйственных целях. При потере связи с мобильным пультом контроля и управления беспилотный летательный аппарат переходит в автоматический режим и способен выполнить предустановленные команды, после чего долететь до пункта назначения, руководствуясь данными системы глобального позиционирования.
Основой для технологической выполнимости настоящего беспилотного летательного аппарата и комплекса авианаблюдения являются успехи в нескольких микротехнологиях, в особенности технологиях микроэлектромеханических систем. Эти системы объединяют планарные электронные микрокомпоненты с сопоставимыми по размерам пространственными электромеханическими структурами различной сложности, что обеспечивает уникальные функциональные возможности. В настоящее время такие устройства (например, бесколлекторный электродвигатель на ниодиевых магнитах AXI 2814/22, акселерометр XL335B, пьезоэлектрический гироскоп ALI 037) производятся промышленным способом.
При этом комплекс авианаблюдения содержит прикрепленный к шасси поворотно-наклонный гидростабилизированный подвес, связанный с блоком управления поворотно-наклонным гидростабилизированным подвесом, который связан с маршрутным вычислительным устройством, инерциальное измерительное устройство в микроисполнении содержит акселерометр, магнитометр, микрогироскоп и барометр, маршрутное вычислительное устройство, инерциальное измерительное устройство, система видеонаблюдения и блок приема и обработки данных спутниковой навигационной системы образуют бортовую систему обеспечения полета, бортовая система обеспечения полета расположена на объединяющей несущей пластине, система видеонаблюдения содержит устройство видеонаблюдения в видимом и инфракрасном спектре и передатчик видеоданных, расположенные в бортовой системе обеспечения полета, а также приемник видеоданных, расположенный в мобильным пульте контроля и управления, устройство видеонаблюдения установлено на поворотно-наклонном гидростабилизированном подвесе, бортовая система обеспечения полета содержит приемно-передающую радиосистему, связанную с маршрутным вычислительным устройством и выполненную с возможностью обмена данными по радиоканалу с мобильной приемно-передающей радиосистемой, расположенной в мобильным пульте контроля и управления, мобильный пульт контроля и управления содержит портативный персональный компьютер, подключенный к мобильной приемно-передающей радиосистеме, блоку приема и обработки сигналов спутниковой навигационной системы, приемнику видеоданных, пульту управления беспилотным летательным аппаратом и мобильному индивидуальному устройству отображения видеоданных, трекер и систему аварийной посадки, связанные с маршрутным вычислительным устройством.
Дополнительно комплекс авианаблюдения содержит радиодоплеровскую систему 24 измерения скорости и высоты полета беспилотного летательного аппарата, электронную навигационную картографическую систему 25, доплеровский гидроакустический лаг 26, соединенные с маршрутным вычислительным устройством 2.
Посредством радиодоплеровской системы 24 измерения скорости и высоты полета беспилотного летательного аппарата, которая включает четыре приемопередатчика, два из которых размещены на крыльях беспилотного летательного аппарата и выполнены двухлучевыми, а два других приемопередатчика размещены в носовой и кормовой оконечностях беспилотного летательного аппарата и выполнены однолучевыми измеряют скорость движения беспилотного летательного аппарата в режиме полета и движении по водной поверхности по изменению доплеровской частоты в накрест лежащих лучей, формируемых двухлучевыми приемопередатчиками, а также высоту полета и параметры волнения посредством однолучевых приемопередатчиков.
Электронная навигационная картографическая система 25 представляет собой стандартизированную систему, посредством которой осуществляют совмещение на навигационной карте района полета видеоинформации, получаемой посредством устройства 15 видеонаблюдения в видимом и инфракрасном спектре с учетом данных, получаемых посредством приемно-передающей радиосистемы 19, инерциального измерительного устройства, спутниковой навигационной системы, радиодоплеровской системы 24 измерения скорости и высоты полета беспилотного летательного аппарата, а также посредством доплеровского гидроакустического лага 26 при движении по водной поверхности или непосредственно на заданных горизонтах гидросферы.
Режимы движения непосредственно на заданных горизонтах гидросферы осуществляются посредством четырех гидролыж 10, расположенных, соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата и на оконечностях каждого крыла, при этом каждая гидролыжа 10 выполнена в виде гондолы, снабженной впускными и выпускными клапанами 11, гидролыжи, расположенные соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата, снабжены вертикальными движителями 12, а гидролыжи, расположенные на оконечностях каждого крыла, снабжены горизонтальными движителями 13.
Четыре гидролыжи 10, расположенные соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата и на оконечностях каждого крыла, предназначены также для осуществления безопасной посадки и взлета беспилотного летательного аппарата в морских условиях.
Беспилотный летательный аппарат 1 также снабжен четырьмя гидролыжами 10, расположенными соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата и на оконечностях каждого крыла, при этом каждая гидролыжа выполнена в виде гондолы, снабженной впускными и выпускными клапанами 11, гидролыжи, расположенны, соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата, снабжены вертикальными движителями, а гидролыжи, расположенные на оконечностях каждого крыла, снабжены горизонтальными движителями 12, что обеспечивает движение БЛА по водной поверхности и погружение БЛА на заданный горизонт погружения и движение БЛА в горизонтальном и вертикальном направлениях.
Доплеровский гидроакустический лаг 26 включает гидроакустическую антенну, приемопередающее устройство, устройство выделения доплеровских частот, вычислительное устройство, индикатор, синхронизатор, в том числе устройства первичной обработки (приемные усилители, схемы оценивания доплеровского смещения, АЦА, ЦАП) и вторичной обработки (расчет компонент вектора скорости, учет дестабилизирующих факторов, ведение временной диаграммы, АРУ, АРМ, интерфейс с другими средствами навигации), в котором выполняют разделение четырех лучей, формируемых гидроакустической антенной, восемь кольцевых буферов, на которые поступают выходные коды АЦП для разделения четырех лучей, формируемых гидроакустической антенной, блок компенсации по углам качек, рыскания и вертикальной составляющей скорости носителя доплеровского гидроакустического лага и течений на глубинах плавания, блок управления буферной памятью, которые своими выходами соединены с вычислительным устройством.
Гидроакустическая антенна и приемопередающее устройство конструктивно могут быть размещены в одном корпусе.
В зависимости от габаритов подводного аппарата на нем могут быть размещены несколько гидроакустических антенн, например, в носовой и кормовой части подводного аппарата непосредственно на днище или на выносных кронштейнах по левому и правому бортам.
Также возможно размещение одной гидроакустической антенны с приемопередающим устройством и двух приемников, оси характеристик направленности которых пересекаются на одном горизонте с осью характеристики направленности акустического излучателя-приемника. При этом последовательно изменяют углы наклона характеристик направленности первого и второго акустического приемников, которые расположены на фиксированных расстояниях от излучателя-приемника на одном горизонте с ним. Измеряют времена прихода принятых сигналов, определяют по их значениям, значению скорости звука на горизонте акустических источника и приемников, известным расстояниям между ними значения скорости звука в водоеме на заданных горизонтах. Излучают или монохроматический импульсный акустический сигнал малой длительности, или сложный импульсный акустический сигнал с гиперболической частотной модуляцией, при использовании которой времена прихода принятых сигналов определяют по временному положению максимумов взаимно корреляционных функций излучаемого и принятых сигналов.
В заявляемом техническом решении, предназначенном для определения высокоэнергетического гамма-излучения в окружающей среде, не вводятся ограничения на направление первичных гамма-квантов на центральный кристалл (или кристаллы, если предполагается использовать более трех кристаллов в качестве детектора), а выбор процесса образования электронно-позитронных пар из всей совокупности процессов взаимодействия гамма-излучения с материалом детектора выполняется схемой быстрых тройных совпадений.
Обработка информации в случае использования более трех сцинтилляционных пластин выполняется коммутационной системой, выделяющей любую триаду кристаллов в каждом событии, так что каждый из рассматриваемых кристаллов в данном событии может играть роль центрального, а из одновременных событий в боковых кристаллах отбираются только те, энергия, регистрируемая которыми, соответствует 0,511 МэВ.
Таким образом, эффективность детектора в целом определяется суммой масс кристаллов (кроме двух крайних), участвующих в процессах регистрации гамма-излучения с энергией первичных квантов выше 1,02 МэВ.
Размер пластин 40×30×15 мм и их конфигурация обеспечивают хороший оптический контакт с фотокатодами ФЭУ и достаточно высокую вероятность вылета аннигаляционных квантов для улавливания их другими пластинами детектора.
Сцинтилляционные пластины,выполнены из германата висмута.
Персональный компьютер 34 может быть выполнен, как и в прототипе [13] с установленным GSM-модемом. Выходы счетчиков сцинтилляционных связаны с входом контроллера, отвечающего за питание и обработку сигналов со счетчиков. Модуль GPS введен в состав контроллера и предназначен для получения текущих географических координат. Выход контроллера через CAN-сеть связан с входом модуля GSM, реализующего беспроводной канал обмена данными между блоком детектирования и пультом управления. Аккумуляторная батарея 35 служит для питания всех составных частей блока детектирования и соединена с контроллером, на вход которого подается напряжение 5 В от зарядного устройства для зарядки аккумуляторной батареи.
Поиск источников излучения производится во время движения носителей измерительной аппаратур по заранее заданному маршруту, блоком детектирования производится непрерывная регистрация гамма-излучения. Информация, которая выдается от блока детектирования, через GSM-канал поступает на пульт управления и включает в себя: текущее положение БПЛА по показаниям модуля GPS, величину превышения сигнала от обнаруженного источника над уровнем фона, тип идентифицированного радионуклида в случае обнаружения. Это позволяет отслеживать радиационную обстановку в каждой точке заданного маршрута БПЛА в режиме реального времени. Данная информация наносится на электронную карту местности в пульте управления и совмещается с заранее заданным маршрутом БПЛА. По окончании полета и возвращении БПЛА в заданную точку при помощи пульта управления производится считывание с блока детектирования спектрометрических и вспомогательных данных из энергонезависимой памяти долговременного хранения, входящей в состав контроллера.
В отличие от прототипа [13] при измерениях на однокристальных гамма-спектрометрах главных составляющих радиоактивности атмосферы - продуктов распада радона - часто используют такие пики полного поглощения энергии (ПППЭ), как 583 кэВ (Tl-208 из семейства Th-232) и 609 кэВ (Bi-214 из семейства U-238). На общем гамма-спектре свежеотобранного фильтра с атмосферными аэрозолями эти линии располагаются на широком пьедестале, созданном распределением комптоновских квантов от калия-40 и др. высокоэнергетических гамма-излучателей. При работе с парными гамма-спектрометрами с использованием схем тройных совпадений низкоэнергетическая часть гамма-спектров практически исчезает, а линии ПППЭ проявляются тем лучше, чем выше энергии соответствующих им гамма-квантов. Таким образом, определение изотопов радона 222 и 220, например, по линиям 1763 кэВ (Bi-214 из семейства U-238) и 2614 кэВ (Tl-208 из семейства Th-232) становится более надежным, т.к. под этими пиками интенсивностью квантов комптоновского рассеяния практически можно пренебречь.
При измерении радиоактивности аэрозольных фильтров сам процесс измерения практически не отличается от измерения с однокристальным гамма-спектрометром. Однако получаемые гамма-спектры существенно различаются, т.к. значительно уменьшается площадь под частью гамма-спектра, созданная рассеянным излучением в низкоэнергетической области спектра, а интенсивность высокоэнергетических пиков становится более ярко выраженной.
Техническим результатом данного изобретения является разработка компактного прибора для регистрации в экспедиционных условиях высокоэнергетических гамма-излучателей на фоне преобладающих интенсивностей гамма-излучения средних и низких энергий.
При разработке промышленного образца для регистрации высокоэнергетического гамма-излучения, для повышения надежности определения высокоэнергетических гамма-излучателей и уменьшения габаритов парного гамма-спектрометра применена оптимизированная пластинчатая геометрия и современные компоненты сцинтилляционных детекторов, обеспечивающие выделение высокоэнергетического гамма-излучения на фоне преобладающего уровня гамма-излучения низких и средних энергий при работе в экспедиционных условиях.
Источники информации
1. Патент RU №2015067.
2. Патент RU №2232104.
3. Патент RU №123393 U1, 27.12.2012.
4. Патент RU №2518440 С.
5. Богатов С.А. Мобильное средство радиационной разведки на базе беспилотного летательного аппарата MD4-1000. / А.С. Богатов, С.Л. Гаврилов, С.А. Ткаченко и др. // Специальная техника. - 2012. №6, с. 16-22.
6. И.В. Калиберда, Ф.Ф. Брюхань // Вестник МГСУ. 2012. №4, с. 186-194.
7. Патент RU №123393 U1, 27.12.2012.
8. Патент RU №105474 U1, 10.06.2011.
9. Заявка US №2013114787 А1, 09.03.2013.
10. Патент RU №2565335 С2, 20.10.2015 (прототип).
11. West Y.I. Measurement of low-energy gamma-ray pair cross-sections in scintillators using a scintillation pair spectrometer. Phys. Rev., 1956, V. 101, no. 3, pp. 915-921.
12. Avignone F.T., Khalil A.E. Cross-section for the production of electron-positron pairs by 1,064 Mev photons of germanium. Phys. Rev. A, 1981, V. 24, no. 6, pp. 2920-2924.
13. Патент на полезную модель RU №105474 U1, 10.06.2011 (прототип).
Изобретение относится к области беспилотных аппаратов и комплексам наблюдения для них. Комплекс наблюдения содержит беспилотный аппарат и мобильный пульт контроля и управления. Беспилотный аппарат снабжен четырьмя гидролыжами, расположенными соответственно в носовой и кормовой частях корпуса и на оконечностях каждого крыла. При этом каждая гидролыжа выполнена в виде гондолы, снабженной впускными и выпускными клапанами. Гидролыжи, расположенные соответственно в носовой и кормовой частях корпуса аппарата, снабжены вертикальными движителями, а гидролыжи, расположенные на оконечностях каждого крыла, снабжены горизонтальными движителями. В комплекс наблюдения дополнительно введены радиодоплеровская система измерения скорости и высоты полета беспилотного аппарата, электронная навигационная картографическая система, доплеровский гидроакустический лаг, соединенные с маршрутным вычислительным устройством. Обеспечивается расширение функциональных возможностей беспилотного аппарата с одновременным повышением достоверности при выполнении видеосъемки и измерении радиоактивности гамма-излучателей. 3 н. и 2 з.п. ф-лы, 4 ил.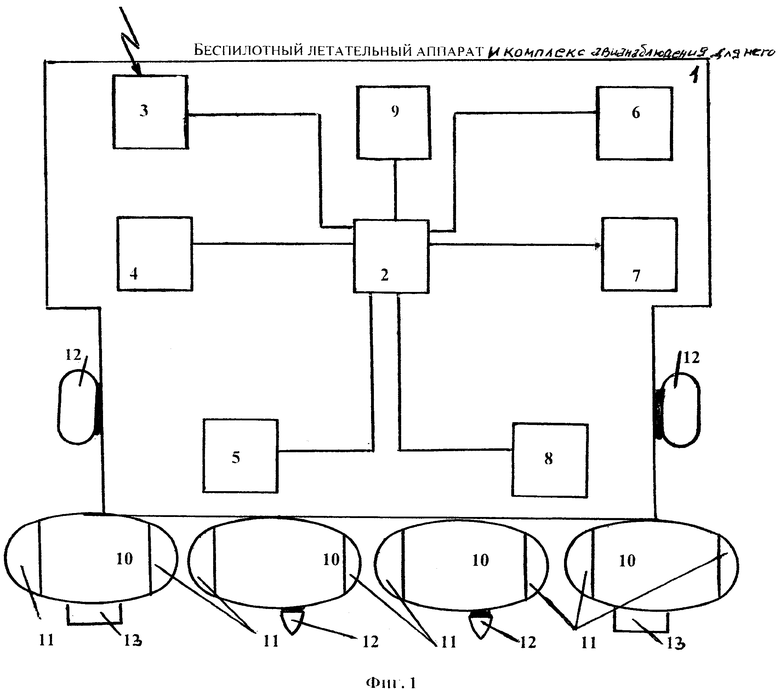
1. Беспилотный аппарат, содержащий несущий каркас и электродвигатели с воздушными винтами, связанные с аккумуляторной батареей, на несущем каркасе в вершинах воображаемого многоугольника жестко зафиксированы по меньшей мере шесть электродвигателей с воздушными винтами с контролируемой частотой вращения, связанных с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством и блоком приема и обработки данных спутниковой навигационной системы, блок детектирования гамма-излучения, отличающийся тем, что беспилотный аппарат снабжен четырьмя гидролыжами, расположенными соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата и на оконечностях каждого крыла, при этом каждая гидролыжа выполнена в виде гондолы, снабженной впускными и выпускными клапанами, гидролыжи, расположенные соответственно в носовой и кормовой частях корпуса беспилотного летательного аппарата, снабжены вертикальными движителями, а гидролыжи, расположенные на оконечностях каждого крыла, снабжены горизонтальными движителями.
2. Комплекс наблюдения, содержащий беспилотный аппарат и мобильный пульт контроля и управления, при этом беспилотный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы по меньшей мере шесть электродвигателей с воздушными винтами с контролируемой частотой вращения, связанных с аккумуляторной батареей и с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством, мобильным пультом контроля и управления, системой видеонаблюдения и блоком приема и обработки данных спутниковой навигационной системы, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, а маршрутное вычислительное устройство выполнено с возможностью управления частотой вращения электродвигателей, при этом обеспечения горизонтального положения аппарата по сигналам инерциального измерительного устройства, обеспечения изменения курса и высоты аппарата по сигналам телеметрии с мобильного пульта контроля и управления, обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам блока приема и обработки данных спутниковой навигационной системы для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, а также с возможностью обеспечения визуального контроля за полетом по сигналам видеоданных системы видеонаблюдения, отличающийся тем, что в комплекс наблюдения дополнительно введены радиодоплеровская система измерения скорости и высоты полета беспилотного аппарата, электронная навигационная картографическая система, доплеровский гидроакустический лаг, соединенные с маршрутным вычислительным устройством.
3. Комплекс наблюдения по п. 2, отличающийся тем, что радиодоплеровская система измерения скорости и высоты полета беспилотного аппарата включает четыре приемопередатчика, два из которых размещены на крыльях беспилотного аппарата и выполнены двухлучевыми, а два других приемопередатчика размещены в носовой и кормовой оконечностях беспилотного аппарата и выполнены однолучевыми.
4. Комплекс наблюдения по п. 2, отличающийся тем, что доплеровский гидроакустический лаг содержит гидроакустическую антенну, приемопередающее устройство, устройство выделения доплеровских частот, вычислительное устройство, индикатор, синхронизатор, в том числе устройства первичной обработки – приемные усилители, схемы оценивания доплеровского смещения, АЦА, ЦАП, и вторичной обработки - расчет компонент вектора скорости, учет дестабилизирующих факторов, ведение временной диаграммы, АРУ, АРМ, интерфейс с другими средствами навигации, в котором выполняют разделение четырех лучей, формируемых гидроакустической антенной, отличающийся тем, что введены восемь кольцевых буферов, на которые поступают выходные коды АЦП для разделения четырех лучей, формируемых гидроакустической антенной, блок компенсации по углам качек, рыскания и вертикальной составляющей скорости носителя доплеровского гидроакустического лага и течений на глубинах плавания, блок управления буферной памятью, которые своими выходами соединены с вычислительным устройством.
5. Блок детектирования гамма-излучения в составе сцинтилляционного детектора, контроллера с установленным модулем GPS, аккумуляторной батареи, в котором для связи между блоком детектирования и пультом дистанционного управления используется GSM-канал, образованный размещенным в блоке детектирования модулем GSM и установленным в пульте управления GSM-модемом, при этом сцинтилляционный детектор ориентирован основанием перпендикулярно направлению полета беспилотного аппарата, отличающийся тем, что сцинтилляционный детектор выполнен как минимум из трех одинаковых сцинтилляционных пластин размером 40×30×15 мм, выполненных из германата висмута, и кремниевых фотоэлектронных умножителей.
| WO 2015179624 A1, 26.11.2015 | |||
| Демпфер сухого трения для изменения собственной частоты колебаний бандажированных рабочих лопаток турбин | 1959 |
|
SU128868A1 |
| БЛОК ДЕТЕКТИРОВАНИЯ ГАММА-ИЗЛУЧЕНИЯ В СОСТАВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ЛЕГКОГО КЛАССА | 2013 |
|
RU2565335C2 |
| СИСТЕМА ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2387080C1 |
| US 7749323 B2, 06.07.2010. | |||

