Изобретение относится к области авиационной техники, а именно к беспилотным летательным комплексам авианаблюдения, и может быть использовано для дистанционного видео- и фото- зондирования поверхности Земли, мониторинга техногенных и природных объектов, ретрансляции радио- и оптических сигналов, скрытного наблюдения и т.п.
Известен беспилотный летательный комплекс (RU 2232104 В64С 29/02, G01V 9/00, 10.07.2004), содержащий дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображения, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом. Радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными гироскопами-акселерометрами, а сам дистанционно пилотируемый летательный аппарат выполнен в виде автономно пилотируемого летательного микроаппарата и размещен вместе с мобильным комплексом управления и обработки информации в общем, портативном контейнере. Автономно пилотируемый летательный микроаппарат для портативного комплекса авианаблюдений содержит фюзеляж, на котором размещены винтовой движитель, рулевое управление по курсу и тангажу, видеокамера с передатчиком видеоизображения, радиоуправляемая бортовая система обеспечения полета летательного аппарата и бортовая приемопередающая аппаратура. Кроме того, в него введена антенная система, закрепленная на фюзеляже, выполненным с приборным отсеком. В корпусе отсека установлены видеокамера с передатчиком видеоизображения, рулевые машинки, аккумуляторная батарея, приборы радиоуправляемой бортовой системы обеспечения полета летательного аппарата и бортовой приемопередающей аппаратуры. Винтовой движитель выполнен в виде, по меньшей мере, одного винтового блока с редуктором и электродвигателем, подключенным к общей аккумуляторной батарее.
Недостатком данного устройства является то, что для питания электродвигателя винтового движителя используется аккумуляторная батарея, поэтому продолжительность полета ограничена емкостью аккумуляторной батареи. Необходимость зарядки аккумуляторной батареи предполагает прекращение полета и приземление беспилотного летательного аппарата. Отмеченный факт, а именно, ограниченная длительность полета, характеризует основной недостаток прототипа.
Известен беспилотный летательный комплекс (ЕА №042897, В64С 27/08, В64С 39/02, H02J 7/02, H02J 50/10, 31.03.2023), выбранный в качестве прототипа, содержит мобильный пульт контроля и управления и беспилотный летательный аппарат, содержащий несущий каркас, к боковой поверхности которого жестко прикреплены одними своими концами штанги, на других концах которых жестко закреплены электрические двигатели с воздушными винтами, на нижней поверхности несущего каркаса жестко закреплено шасси, на котором расположена силовая аккумуляторная батарея, выход которой соединен через регулятор оборотов с входами электрических двигателей, к центральной части нижней поверхности несущего каркаса с помощью шарнира прикреплен поворотно-наклонный гиростабилизированный подвес, на котором размещено устройство видеонаблюдения, выход которого соединен с входом бортовой системы обеспечения полета, закрепленной на верхней поверхности несущего каркаса и прикрытой защитной верхней пластиной, бортовая система обеспечения полета состоит из маршрутного вычислительного устройства, к первому-девятому измерительным входам которого подключены соответственно блок приема и обработки сигналов спутниковой навигации, инерциальное измерительное устройство, включающее акселерометр, магнитометр и барометр, трекер, устройство аварийной посадки, блок управления поворотно-наклонным гиростабилизированным подвесом, сонар, устройство видеонаблюдения, приемно-передающая радиосистема, передатчик видеоданных, а к силовому входу бортовой системы обеспечения полета подключена батарея питания, мобильный пульт контроля и управления, который состоит из персонального компьютера с монитором, к трем выходам которого соответственно подключены приемно-передающая радиосистема, специализированный пульт управления беспилотным летательным аппаратом и мобильное индивидуальное устройство отображения видеоданных, а выход персонального компьютера соединен с приемником видеоданных, к корпусам электрических двигателей своей внутренней поверхностью прикреплено габаритное кольцо, на внешней поверхности которого размещена кольцевая электрическая обмотка, выводы которой присоединены к первому силовому входу устройства управления зарядом батарей, а его выходы соединены с батареей питания бортовой системы обеспечения полета и силовой аккумуляторной батареей питания электродвигателей, к индикаторному входу устройства управления зарядом батарей подключен индикатор уровня заряда аккумуляторной батареи, жестко закрепленный на шасси, на котором также жестко закреплен датчик напряженности электрического поля, соединенный с десятым измерительным входом маршрутного вычислительного устройства, на верхней поверхности защитной верхней пластины жестко закреплена солнечная батарея, выход которой соединен со вторым силовым входом устройства управления зарядом батарей.
Необходимо отметить, что зарядка батареи питания бортовой системы обеспечения полета и силовой аккумуляторной батареи питания электродвигателей может осуществляться только при больших величинах внешнего магнитного поля и солнечной инсоляции. Сказанное обусловливает необходимость прекращения полета и приземление беспилотного летательного аппарата для осуществления зарядки аккумуляторных батарей, то есть длительность непрерывного полета имеет определенные ограничения.
Задача изобретения - увеличение продолжительности полета путем использования энергии воздушного потока, возникающего в результате вращения воздушных винтов электрических двигателей.
Технический результат достигается тем, что в беспилотном летательном комплексе, содержащем мобильный пульт контроля и управления и беспилотный летательный аппарат, содержащий несущий каркас, к боковой поверхности которого жестко прикреплены одними своими концами штанги, на других концах которых жестко закреплены электрические двигатели с воздушными винтами, на нижней поверхности несущего каркаса жестко закреплено шасси, на котором расположена силовая аккумуляторная батарея, выход которой соединен через регулятор оборотов с входами электрических двигателей, к центральной части нижней поверхности несущего каркаса с помощью шарнира прикреплен поворотно-наклонный гиростабилизированный подвес, на котором размещено устройство видеонаблюдения, выход которого соединен с входом бортовой системы обеспечения полета, закрепленной на верхней поверхности несущего каркаса и прикрытой защитной верхней пластиной, бортовая система обеспечения полета состоит из маршрутного вычислительного устройства, к первому-девятому измерительным входам которого подключены соответственно блок приема и обработки сигналов спутниковой навигации, инерциальное измерительное устройство, включающее акселерометр, магнитометр и барометр, трекер, устройство аварийной посадки, блок управления поворотно-наклонным гиростабилизированным подвесом, сонар, устройство видеонаблюдения, приемно-передающая радиосистема, передатчик видеоданных, а к силовому входу бортовой системы обеспечения полета подключена батарея питания, мобильный пульт контроля и управления, который состоит из персонального компьютера с монитором, к трем выходам которого соответственно подключены приемно-передающая радиосистема, специализированный пульт управления беспилотным летательным аппаратом и мобильное индивидуальное устройство отображения видеоданных, а выход персонального компьютера соединен с приемником видеоданных, к корпусам электрических двигателей своей внутренней поверхностью прикреплено габаритное кольцо, на внешней поверхности которого размещена кольцевая электрическая обмотка, выводы которой присоединены к первому силовому входу устройства управления зарядом батарей, а его выходы соединены с батареей питания бортовой системы обеспечения полета и силовой аккумуляторной батареей питания электродвигателей, к индикаторному входу устройства управления зарядом батарей подключен индикатор уровня заряда аккумуляторной батареи, жестко закрепленный на шасси, на котором также жестко закреплен датчик напряженности электрического поля, соединенный с десятым измерительным входом маршрутного вычислительного устройства, на верхней поверхности защитной верхней пластины жестко закреплена солнечная батарея, выход которой соединен со вторым силовым входом устройства управления зарядом батарей, к третьему силовому входу устройства управления зарядом батарей подсоединены выводы электрических генераторов, жестко закрепленных на нижних торцах электрических двигателей и имеющих на своих валах крыльчатки.
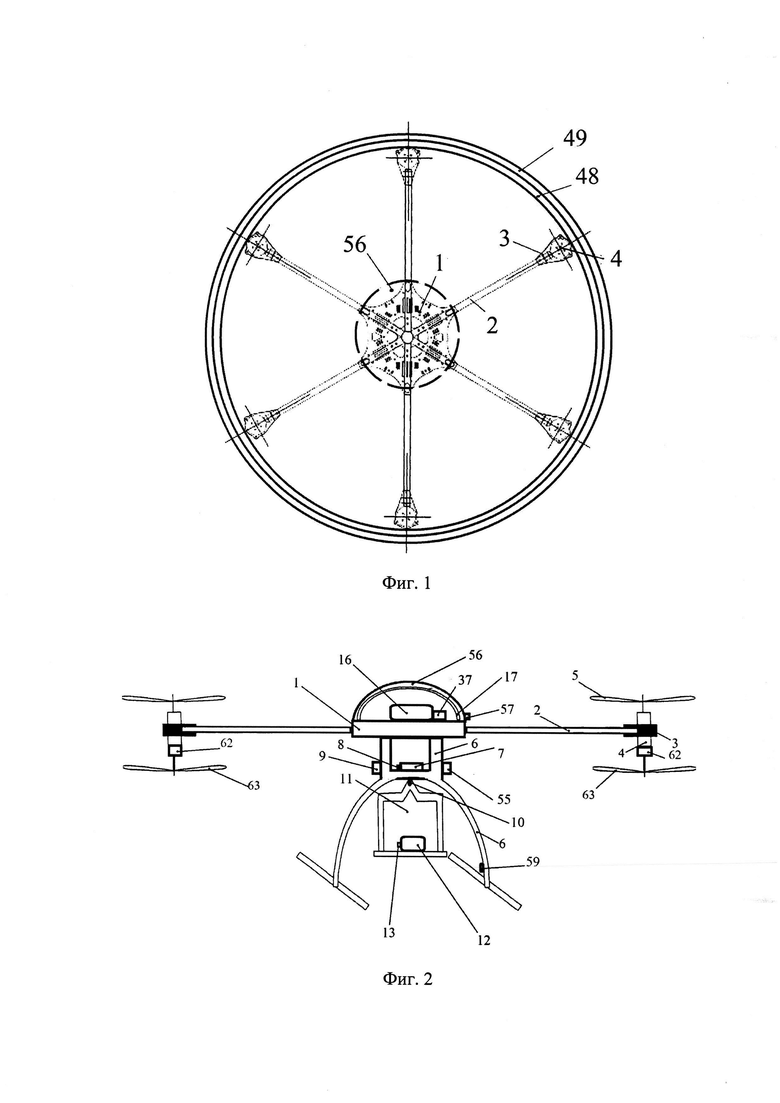
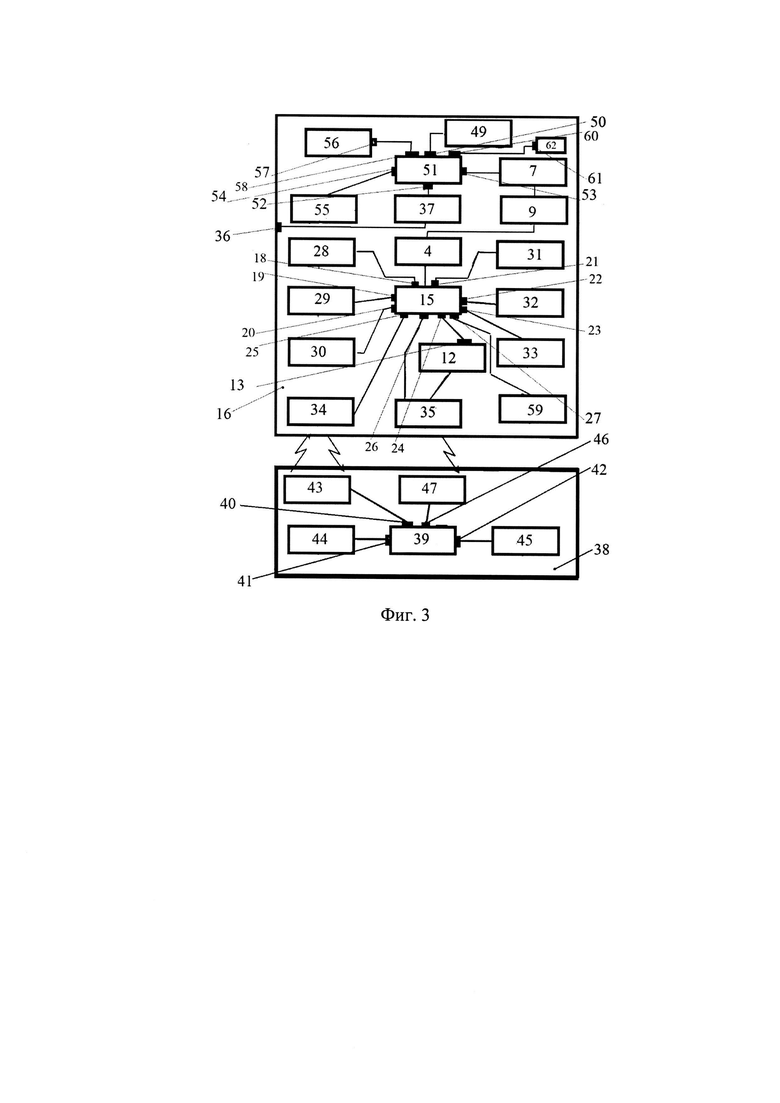
Беспилотный летательный комплекс поясняется чертежами, где на фиг. 1 показан вид сверху конструктивной схемы летающей части беспилотного летательного комплекса со снятой солнечной батареей, контур которой показан штриховой линией, на фиг. 2 - вид сбоку летающей части беспилотного летательного комплекса, а на фиг. 3 приведена блок-схема беспилотного летательного комплекса.
В центре летающей части беспилотного летательного комплекса расположен несущий каркас 1 (фиг. 1), к боковой поверхности которого жестко прикреплены одними своими концами штанги 2. На других концах штанг 2 с помощью креплений 3, например, хомутов, жестко закреплены электрические двигатели 4, например, AXI 2814/22, 037 или RacerstarRacingEdition 2306 2700KV или Readytosky 2205-2300 2300KV или RacerstarRacingEdition 2205 2300KV, с воздушными винтами 5 (фиг. 2). На нижней поверхности несущего каркаса 1 жестко закреплено шасси 6, выполненное, например, из углеволокнитов или углетекстолитов или углепресволокнитов. К шасси 6 могут прикрепляться поплавки, которые не показаны на чертеже. На шасси 6 расположена силовая аккумуляторная батарея 7 для питания электрических двигателей 4, например, LiPo 4S1300 mAh или 1500 mAh, выход 8 которой через регулятор оборотов 9 соединен с электрическими двигателями 4. К центральной части нижней поверхности несущего каркаса 1 с помощью шарнира 10 прикреплен поворотно-наклонный гиростабилизированный подвес 11, на котором размещено устройство видеонаблюдения 12, выход 13 (фиг. 3) которого соединен с входом 14 маршрутного вычислительного устройства 15 бортовой системы обеспечения полета 16, закрепленной на верхней поверхности несущего каркаса 1 (фиг. 2) и прикрытой защитной верхней пластиной 17. Маршрутное вычислительное устройство 15 может быть выполнено, например, из микропроцессора, буферных регистров, запоминающих устройств, интерфейсных схем. К девяти измерительным входам 18-27 маршрутного вычислительного устройства 15 (фиг. 3) подключены соответственно блок приема и обработки сигналов спутниковой навигации 28, инерциальное измерительное устройство 29, включающее акселерометр, например, акселерометр XL335B, магнитометр и барометр (не показаны), трекер 30, например, GPS трекер RF-V16, GPS или трекер ТК 106, устройство аварийной посадки 31, блок управления поворотно-наклонным гиростабилизированным подвесом 32, сонар 33, устройство видеонаблюдения 12, которое может работать в видимом и инфракрасном спектре, приемно-передающая радиосистема 34, передатчик видеоданных 35. К силовому входу 36 бортовой системы обеспечения полета 16 подключена батарея питания 37, которая включает в себя устройство видеонаблюдения 12, маршрутное вычислительное устройство 15, блок приема и обработки сигналов спутниковой навигации 28, инерциальное измерительное устройство 29, трекер 30, устройство аварийной посадки 31, блок управления поворотно-наклонным гиростабилизированным подвесом 32, сонар 33, приемно-передающую радиосистему 34.
Мобильный пульт контроля и управления 38 состоит из персонального компьютера 39 с монитором, к его трем выходам 40-42 подключены соответственно приемно-передающая радиосистема 43, специализированный пульт управления 44 беспилотным летательным комплексом и мобильное индивидуальное устройство отображения видеоданных 45, а вход 46 персонального компьютера 39 соединен с приемником видеоданных 47.
К корпусам (фиг. 1) электрических двигателей 4 своей внутренней поверхностью прикреплено габаритное кольцо 48, на внешней поверхности которого размещена кольцевая электрическая обмотка 49, выполненная из меди или алюминия. Кольцевая электрическая обмотка 49 присоединена к первому силовому входу 50 (фиг. 3) устройства управления зарядом батарей 51, а его выходы 52 и 53 соединены с батареей питания 37 бортовой системы обеспечения полета 16 и силовой аккумуляторной батареей 7 питания электрических двигателей 4. К индикаторному входу 54 устройства управления зарядом батарей 51 подключен индикатор уровня заряда аккумуляторных батарей 55, жестко закрепленный на шасси 6. На верхней поверхности защитной верхней пластины 16 жестко закреплена солнечная батарея 56, выход 57 которой присоединен ко второму силовому входу 58 устройства управления зарядом батарей 51, на нижней части шасси 6 жестко закреплен датчик напряженности электрического поля 59, например, типа EPIC или РаЭ 8/00-15, который соединен с измерительным входом 27 маршрутного вычислительного устройства 15.
К третьему силовому входу 60 устройства управления зарядом батарей 51 подсоединены выводы 61 электрических генераторов 62, жестко закрепленных на нижних торцах электрических двигателей 4 и имеющих на своих валах крыльчатки 63.
Беспилотный летательный комплекс работает следующим образом. Напряжение питания с силовой аккумуляторной батареи 7 через регулятор оборотов 9 поступает на электрические двигатели 4, и воздушные винты 5 (фиг. 2) начинают вращаться. Летающая часть беспилотного летательного комплекса осуществляет взлет.
Возможны два режима работы беспилотного летательного комплекса - «ручной» и «автономный».
В «ручном» режиме маршрутное вычислительное устройство 15 (фиг. 3)выполняет следующие функции: подает управляющий сигнал на электрические двигатели 4 и на основе сигналов инерциального измерительного устройства 29 обеспечивает горизонтальное положение летающей части беспилотного летательного комплекса; по сигналам с блока приема и обработки сигналов спутниковой навигации 28 определяет координаты летающей части беспилотного летательного комплекса и передает их на мобильный пульт контроля и управления 38. При приходе ответных сигналов телеметрии с мобильного пульта контроля и управления 38 маршрутное вычислительное устройство 15 вырабатывает управляющие сигналы, которые поступают на электродвигатели 4 и изменяют частоты вращения воздушных винтов 5 (фиг. 2). В результате этого летающая часть беспилотного летательного комплекса изменяет курс и высоту полета.
В «автономном» режиме маршрутное вычислительное устройство 15 (фиг. 3) функционирует по заложенной в него программе, на основании координат спутниковой навигационной системы GPS/ГЛОНАСС выполняет автоматически полетное задание с возвращением на взлетную площадку.
В обоих режимах осуществляется визуальный контроль за полетом по сигналам видеоданных с устройства видеонаблюдения 12, которые поступают на передатчик видеоданных 35 и передаются в приемник видеоданных 47 мобильного пункта контроля и управления 38, где они обрабатываются и передаются на персональный компьютер 39, здесь информация с сигналов перерабатывается и отображается на мониторе, который на чертеже не показан.
В «ручном» режиме персональный компьютер 39 выдает сигнал на приемно-передающую радиосистему 43, которая излучает управляющий сигнал, принимаемый приемно-передающей радиосистемой 34, которая вырабатывает сигнал, приходящий через вход 25 в маршрутное вычислительное устройство 15, где сигнал обрабатывается и анализируется. В результате маршрутное вычислительное устройство 15 генерирует управляющий сигнал первого типа, который приходит на электродвигатели 4, последние соответствующим образом изменяют частоты вращения своих воздушных винтов 5 (фиг. 2), а, следовательно, изменяют ориентацию и положение летательной части беспилотного летательного комплекса. Маршрутное вычислительное устройство 15 (фиг. 3) также генерирует управляющие сигналы второго типа, поступающие на блок управления поворотно-наклонного гиростабилизированного подвеса 32, в результате -устройство видеонаблюдения 12 изменяет свою ориентацию.
В процессе полета трекером 30 осуществляется запись координат движения летательной части беспилотного летательного комплекса с заданной периодичностью, эта информация подается на маршрутное вычислительное устройство 15.
Если полет проходит над водной поверхностью и при необходимости определения наличия и координат различных транспортных аппаратов, находящихся в толще воды, работает сонар 33, передающий полученную информацию на маршрутное вычислительное устройство 15.
При необходимости продолжить полет, не прерывая последний, и при значительном разряде силовой аккумуляторной батареи 7 и батареи питания 37 бортовой системы обеспечения полета 16 летающая часть сближается с проводами действующей линии действующей электропередачи или контактной сети электрифицированного железнодорожного транспорта, местоположение которой определяется оператором визуально, если полет осуществляется в «ручном» режиме, либо его координаты заложены в программе маршрутного вычислительного устройства 15. Сближение происходит до тех пор, пока не сработает датчик напряженности электрического поля 59 в момент времени, когда напряженность электрического поля в зоне датчика напряженности электрического поля 59 приблизится к 1 кВ/см, что составляет пробивную напряженность влажного воздуха. Сигнал с датчика напряженности электрического поля 59 поступает на десятый измерительный вход 27 маршрутного вычислительного устройства 15, которое вырабатывает сигнал на электрические двигатели 4. Под действием этого сигнала фиксируется частота вращения воздушных винтов 5 (фиг. 2), и летающая часть беспилотного летательного комплекса «зависает» над проводом линии электропередачи, если ток в проводе - переменный, или продолжает лететь на фиксированном расстоянии от него по траектории «змейка» в горизонтальной плоскости по сигналам с маршрутного вычислительного устройства 15 (фиг. 3), если ток в проводе - постоянный. Электрическое поле по закону электромагнитной индукции индуцирует в кольцевой электрической обмотке 49 (фиг. 1) электродвижущую силу, под действием которой в двух цепях, первая из которых состоит из электрической обмотки 49, устройства управления зарядом батарей 51 (фиг. 3) и батареи питания 37 бортовой системы обеспечения полета 16, а вторая - из электрической обмотки 49, устройства управления зарядом батарей 51 и силовой аккумуляторной батареи 7 питания электрических двигателей 4, начинают протекать токи. Таким образом осуществляется заряд батареи питания 37 и силовой аккумуляторной батареи 7. Когда степень заряда достигнет 100%, это регистрируется индикатором уровня заряда аккумуляторных батарей 55, устройство управления зарядом батарей 51 отключает кольцевую электрическую обмотку 49, и заряд прекращается.
В светлое время суток лучи света падают на солнечную батарею 56 (фиг. 2), которая начинает вырабатывать ток в результате фотоэффекта. Этот ток через второй силовой вход 58 (фиг. 3) поступает на устройство управления зарядом батарей 51, а затем на силовую аккумуляторную батарею 7 и батарею питания 37бортовой системы обеспечения полета 16, подзаряжая их. Когда степень заряда достигнет 100%, это регистрируется индикатором уровня заряда аккумуляторных батарей 55, устройство управления зарядом батарей 51 отключает солнечную батарею 56. Маршрутное вычислительное устройство 15 на основе заложенной в него программы в отсутствии связи с мобильным пультом контроля и управления 38, на основании координат спутниковой навигационной системы GPS/ГЛОНАСС выполняет с помощью устройства аварийной посадки 31 в автоматическом режиме полетное задание с возвращением на взлетную площадку.
Во время полета летающей части воздушные потоки от вращающихся воздушных винтов 5 приводят во вращение крыльчатки 63 электрических генераторов 62, которые начинают генерировать электрический ток, поступающий на третий силовой вход 60 устройства управления зарядом батарей 51, а затем на силовую аккумуляторную батарею 7 и батарею питания 37 бортовой системы обеспечения полета 16.
Как можно видеть, возможность подзаряда силовой аккумуляторной батареи 7 и батареи питания 37 бортовой системы обеспечения полета 16 без возвращения на базу обуславливает увеличение продолжительности полета беспилотного летательного комплекса по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| Беспилотный летательный комплекс | 2023 |
|
RU2816399C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2801404C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2806131C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2814297C1 |
| ПЕРЕНОСНОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ МНОГОЦЕЛЕВОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2632779C1 |
Беспилотный летательный комплекс содержит мобильный пульт контроля и управления и беспилотный летательный аппарат. Беспилотный летательный аппарат содержит несущий каркас, к боковой поверхности которого жестко прикреплены одними своими концами штанги, на других концах которых жестко закреплены электрические двигатели с воздушными винтами, на нижних торцах которых закреплены электрические генераторы, имеющие на своих валах крыльчатки. К корпусам электрических двигателей прикреплено габаритное кольцо с кольцевой электрической обмоткой. На нижней поверхности несущего каркаса жестко закреплено шасси, на котором расположена силовая аккумуляторная батарея, выход которой соединен через регулятор оборотов с входами электрических двигателей, а закреплен датчик напряженности электрического поля. К центральной части нижней поверхности несущего каркаса с помощью шарнира прикреплен поворотно-наклонный гиростабилизированный подвес, на котором размещено устройство видеонаблюдения. В верхней части поверхности несущего каркаса расположена солнечная батарея. На верхней поверхности несущего каркаса закреплена бортовая система обеспечения полета, оснащенная средствами управления, средствами спутниковой и инерциальной навигации, средствами управления зарядом батареи, гиростабилизированным подвесом, средствами связи и передачи видеоданных. Мобильный пульт контроля и управления содержит персональный компьютер с монитором, приемо-передающую радиосистему, специализированный пульт управления, мобильное устройство отображения видеоданных, приемник видеоданных. Обеспечивается увеличение продолжительности полета беспилотного летательного аппарата. 3 ил.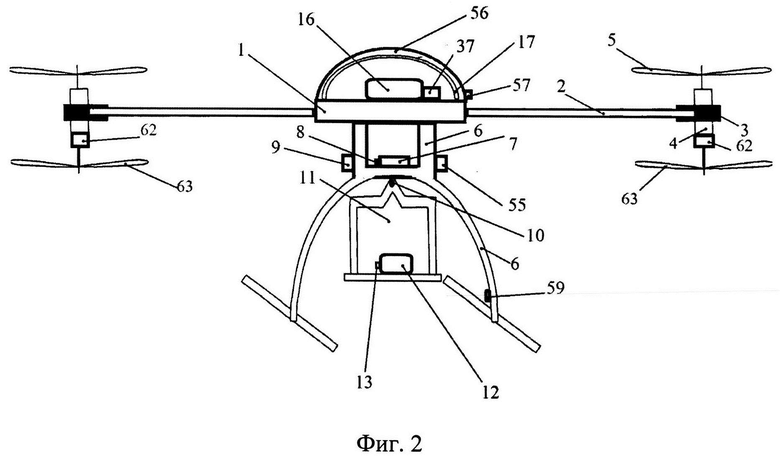
Беспилотный летательный комплекс, содержащий мобильный пульт контроля и управления и беспилотный летательный аппарат, содержащий несущий каркас, к боковой поверхности которого жестко прикреплены одними своими концами штанги, на других концах которых жестко закреплены электрические двигатели с воздушными винтами, на нижней поверхности несущего каркаса жестко закреплено шасси, на котором расположена силовая аккумуляторная батарея, выход которой соединен через регулятор оборотов с входами электрических двигателей, к центральной части нижней поверхности несущего каркаса с помощью шарнира прикреплен поворотно-наклонный гиростабилизированный подвес, на котором размещено устройство видеонаблюдения, выход которого соединен с входом бортовой системы обеспечения полета, закрепленной на верхней поверхности несущего каркаса и прикрытой защитной верхней пластиной, бортовая система обеспечения полета состоит из маршрутного вычислительного устройства, к первому-девятому измерительным входам которого подключены соответственно блок приема и обработки сигналов спутниковой навигации, инерциальное измерительное устройство, включающее акселерометр, магнитометр и барометр, трекер, устройство аварийной посадки, блок управления поворотно-наклонным гиростабилизированным подвесом, сонар, устройство видеонаблюдения, приемно-передающая радиосистема, передатчик видеоданных, а к силовому входу бортовой системы обеспечения полета подключена батарея питания, мобильный пульт контроля и управления, который состоит из персонального компьютера с монитором, к трем выходам которого соответственно подключены приемно-передающая радиосистема, специализированный пульт управления беспилотным летательным аппаратом и мобильное индивидуальное устройство отображения видеоданных, а выход персонального компьютера соединен с приемником видеоданных, к корпусам электрических двигателей своей внутренней поверхностью прикреплено габаритное кольцо, на внешней поверхности которого размещена кольцевая электрическая обмотка, выводы которой присоединены к первому силовому входу устройства управления зарядом батарей, а его выходы соединены с батареей питания бортовой системы обеспечения полета и силовой аккумуляторной батареей питания электродвигателей, к индикаторному входу устройства управления зарядом батарей подключен индикатор уровня заряда аккумуляторной батареи, жестко закрепленный на шасси, на котором также жестко закреплен датчик напряженности электрического поля, соединенный с десятым измерительным входом маршрутного вычислительного устройства, на верхней поверхности защитной верхней пластины жестко закреплена солнечная батарея, выход которой соединен со вторым силовым входом устройства управления зарядом батарей, отличающийся тем, что к третьему силовому входу устройства управления зарядом батарей подсоединены выводы электрических генераторов, жестко закрепленных на нижних торцах электрических двигателей и имеющих на своих валах крыльчатки.
| НАКЛОННЫЙ ЖОЛОБ ДЛЯ СПУСКА ШЛАКА | 1932 |
|
SU42897A1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНЫХ ЭЛЕКТРОУСТАНОВОК | 2022 |
|
RU2791914C1 |
| US 9643729 B2, 09.05.2017 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 10493851 B1, 03.12.2019. | |||

