Изобретение относится к измерительной технике и может быть использовано для автоматического мониторинга магнитного поля Земли в труднодоступных местах, не имеющих стационарных источников питания. Устройство может также использоваться в качестве магнитометрического средства обнаружения при охране важных объектов для обнаружения нарушителей, имеющих при себе ферромагнитные предметы, например, оружие, или нарушителей, передвигающихся на транспортных средствах.
Общеизвестны функциональные схемы феррозондовых магнитометров с обычной (возбуждение синусоидальным током) и параметрической (возбуждение знакопеременными импульсами тока) фильтрацией полезного сигнала [1].
Известен также ряд цифровых феррозондовых магнитометров (RU 2316781, RU 2380718, RU 2382375, RU 2386976, RU 2413235, RU 2437113, RU 2441250, RU 2455656, RU 2475769, RU 2503025), в которых возбуждение осуществляется синусоидальным током. Недостатком этих устройств является большой ток потребления, связанный с непрерывным процессом возбуждения и осуществления обратной связи (компенсации внешнего магнитного поля). Вышеперечисленные устройства имеют повышенные токи потребления за счет непрерывной работы почти всех функциональных узлов. Большое энергопотребление создает трудности при разработке измерительных устройств, работающих автономно от химических источников тока. Уменьшить ток потребления можно за счет применения импульсного способа возбуждения, при этом ток потребления будет тем меньше, чем больше скважность импульсов возбуждения.
Наиболее близким по технической сущности к заявленному изобретению является устройство, описанное в патенте «Способ измерения направления магнитного поля», патент RU №2290655, МПК G01R 33/02, опубл. в 2006 г. В этом способе используется датчик феррозондовый с одним ферромагнитным сердечником, который возбуждается короткими разнополярными импульсами, следующими с заданной частотой, а ток компенсации задается квазипостоянным напряжением с выхода интегратора. Устройство, описанное в патенте, содержит (см. фиг. 1, b) датчик феррозондрвый с намотанными обмотками возбуждения и дополнительной обмоткой (считывания), генератор возбуждения и синхронизации (формирователь тока возбуждения), детектор синхронный, интегратор и резистор.
Общими существенными признаками с заявляемым решением являются: датчик феррозондовый, изготовленный на одном ферромагнитном сердечнике с двумя намотанными обмотками - возбуждения и считывания, и формирователь тока возбуждения.
Недостатком этого способа является увеличенный ток потребления, связанный с непрерывным процессом компенсации внешнего магнитного поля.
Целью настоящего изобретения является уменьшение тока потребления для увеличения времени автономной работы устройства от химических источников тока (батарей или аккумуляторов).
Уменьшение тока потребления в предлагаемом устройстве достигается за счет возбуждения датчика феррозондового импульсной последовательностью коротких однополярных импульсов, поступающих с очень большой скважностью, и за счет включения функциональных узлов устройства в работу по мере необходимости, чтобы в остальное время функциональные узлы находились в отключенном (малопотребляющем) режиме. Для достижения поставленной задачи цикл измерения tизм оптимизирован под импульсный режим работы всех функциональных узлов устройства. Период запуска циклов измерения Тзап выбирается достаточно большим с таким расчетом, чтобы средний ток потребления был бы в Q раз меньше, чем ток потребления в непрерывном режиме (Q=Тзап/tизм).
Для достижения поставленной цели в известное техническое решение введены новые существенные признаки, функциональные элементы и связи.
Эта цель достигнута в предложенном устройстве для автоматического мониторинга магнитных полей, содержащем датчик феррозондовый, изготовленный на одном ферромагнитном сердечнике с двумя намотанными обмотками - возбуждения и считывания, и формирователь тока возбуждения, групповой выход которого соединен с обмоткой возбуждения датчика феррозондового, устройство содержит: магнитометрический модуль, микроконтроллер, радиомодем и модуль приема-передачи, в магнитометрический модуль дополнительно к датчику феррозондовому и формирователю тока возбуждения включены: аналоговый коммутатор, усилитель, формирователь тока компенсации, амплитудный детектор, АЦП и ЦАП, причем обмотка считывания датчика феррозондового подключена к групповому входу/выходу аналогового коммутатора, групповой выход которого подключен к групповому входу усилителя, выход которого подключен к первому входу амплитудного детектора, выход которого подключен к первому входу АЦП, групповой выход которого подключен к групповому входу микроконтроллера, групповой вход аналогового коммутатора подключен к групповому выходу формирователя тока компенсации, групповой вход которого подключен к групповому выходу ЦАП, групповой вход которого подключен к групповому выходу микроконтроллера, первый выход которого подключен ко входу формирователя тока возбуждения, ко входу аналогового коммутатора, ко входу усилителя и ко второму входу амплитудного детектора, второй выход микроконтроллера подключен ко второму входу АЦП, третий выход микроконтроллера подключен ко входу формирователя тока компенсации и ко входу ЦАП, первый вход/выход микроконтроллера подключен к входу/выходу радиомодема, второй вход/выход микроконтроллера подключен к первому входу/выходу модуля приема-передачи, второй вход/выход которого подключен к проводной линии связи.
Сущность изобретения поясняется фиг. 1-3, на которых изображено следующее.
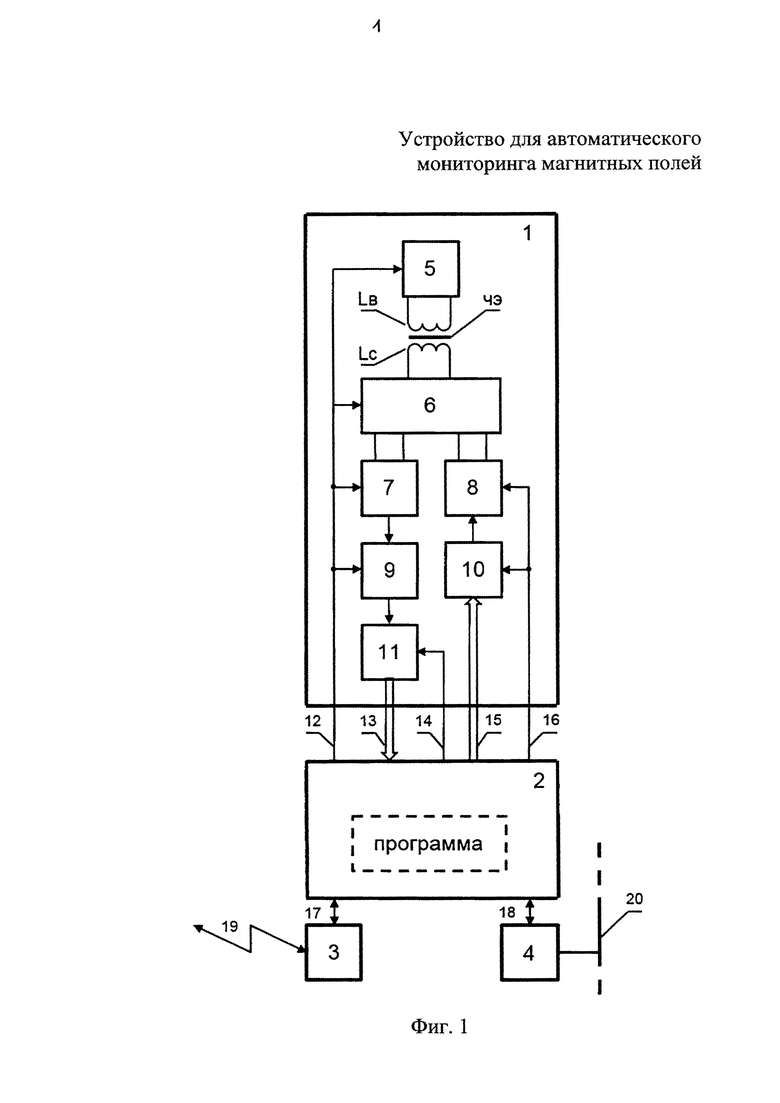
На фиг. 1 приведена структурная схема предлагаемого устройства, где введены обозначения: магнитометрический модуль (ММ) - 1, микроконтроллер - 2, радиомодем - 3, модуль приема-передачи - 4, формирователь тока возбуждения - 5, обмотка возбуждения датчика феррозондового - Lc, обмотка считывания датчика феррозондового - Lc, чувствительный элемент, изготовленный на одном ферромагнитном сердечнике - ЧЭ, аналоговый коммутатор - 6, усилитель - 7, формирователь тока компенсации - 8, амплитудный детектор - 9, ЦАП - 10, АЦП - 11, первый выход микроконтроллера - 12, групповой вход микроконтроллера - 13, второй выход микроконтроллера - 14, групповой выход микроконтроллера - 15, третий выход микроконтроллера - 16, первый вход/выход микроконтроллера - 17, второй вход/выход микроконтроллера - 18, радиоканал связи - 19, проводная линия связи, подключенная ко второму входу/выходу модуля приема-передачи - 20.
На фиг. 2 приведены временные диаграммы работы устройства (эпюры), где дополнительно к фиг.1 введены обозначения: управляющий сигнал, задающий длительность фазы компенсации, - 21 с третьего выхода микроконтроллера 2, управляющий сигнал, задающий длительность фазы возбуждения, - 22 с первого выхода микроконтроллера 12, эпюра импульса напряжения - 23 на выходе усилителя 7, эпюра амплитуды импульса напряжения - 24 на выходе амплитудного детектора 9, управляющий сигнал, задающий фазу аналого-цифрового преобразования, - 25.
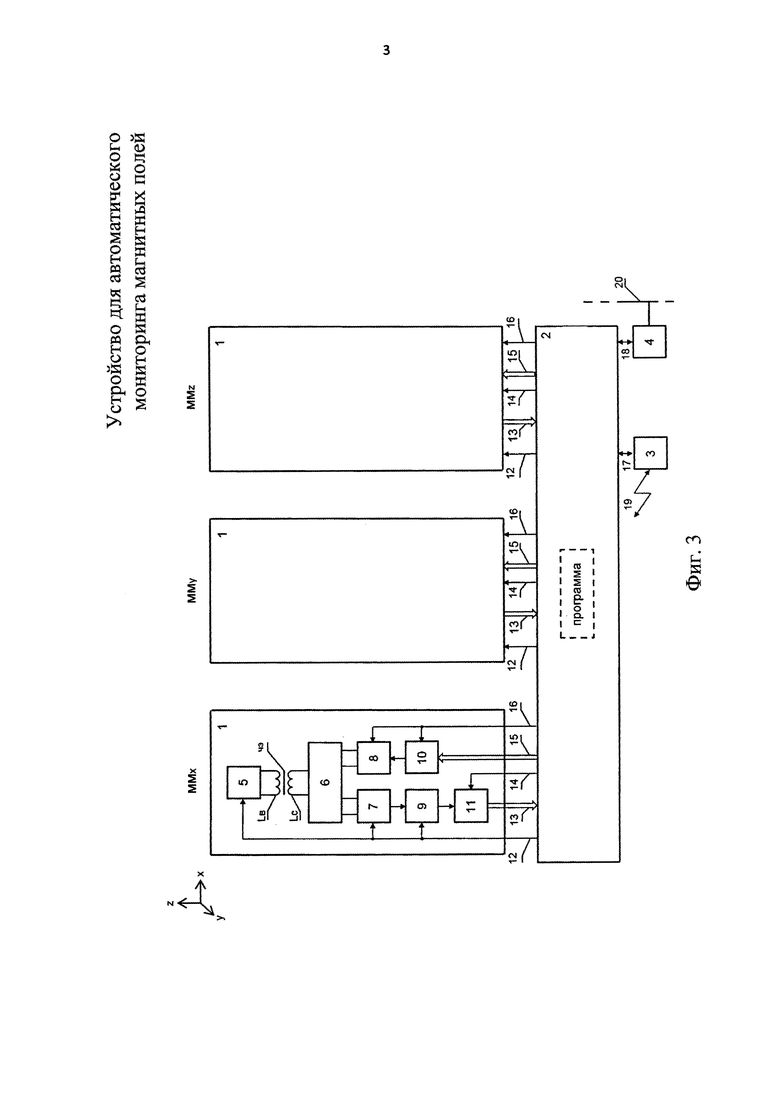
На фиг. 3 приведена структурная схема примерного варианта реализации предлагаемого устройства, выполненного с использованием трех ММ 1 с общей схемой управления для контроля магнитного поля в трех ортогональных координатах X, Y и Z.
Устройство состоит из четырех частей - ММ 1, микроконтроллера 2, радиомодема 3 и модуля приема-передачи 4. Датчик феррозондовый (далее по тексту феррозонд), входящий в состав магнитометрического модуля 1, содержит один стержень, выполненный из намагничиваемого материала и является чувствительным элементом ЧЭ. Датчик феррозондовый содержит две обмотки: обмотку возбуждения Lв и обмотку считывания Lc.
В устройстве цикл измерения tизм состоит из трех функционально значимых фаз (см. фиг. 2): t0…t1 - фаза компенсации внешнего магнитного поля; t1…t2 - фаза возбуждения феррозонда; t2…t3 - фаза аналого-цифрового преобразования полученного с феррозонда сигнала.
Устройство работает под управлением программы микроконтроллера 2 следующим образом (фиг. 1-2).
Программа на портах ввода-вывода микроконтроллера 2 формирует управляющие сигналы, которые запускают цикл измерения.
В момент времени t0 микроконтроллер 2 формирует управляющий сигнал 21 (фиг. 2) на своем третьем выходе 16, задающий длительность фазы компенсации внешнего магнитного поля. По этому сигналу формирователь тока компенсации 8, к которому через аналоговый коммутатор 6 подключена сигнальная обмотка Lc, формирует в сигнальной обмотке Lc ток, величина и направление которого должны создать в объеме сердечника (ЧЭ) равное по модулю, но противоположное по направлению внешнему полю магнитное поле компенсации. Величина и направление тока компенсации задается выходным сигналом ЦАП 10, напряжение на котором в свою очередь определяется цифровым кодом, сформированным на групповом выходе микроконтроллера 15 и вычисленным программой микроконтроллера 2 в предыдущем цикле измерения.
В момент времени t1 микроконтроллер 2 снимает управляющий сигнал 21 (все активные элементы компенсации внешнего магнитного поля переводятся в малопотребляющий режим до следующего цикла измерения) и формирует управляющий сигнал 22 (фиг. 2) на своем первом выходе 12, задающий длительность фазы возбуждения феррозонда. В процессе фазы возбуждения по сигналу 22 сигнальная обмотка Lc аналоговым коммутатором 6 подключается к усилителю 7. По этому сигналу формирователь тока возбуждения 5 формирует в обмотке возбуждения Lв ток, необходимый для формирования на сигнальной обмотке Lc полезного сигнала. При воздействии тока возбуждения на сигнальной обмотке Lc появляется импульс напряжения, амплитуда которого пропорциональна разности индукций внешнего магнитного поля и внутреннего поля компенсации. Сформированный таким образом импульс напряжения усиливается усилителем 7, а амплитуда его фиксируется амплитудным детектором 9. Эпюры напряжений на выходе усилителя 7 и на выходе амплитудного детектора 9 представлены на фиг. 2 (эпюры 23 и 24 соответственно).
В момент времени t2 микроконтроллер 2 снимает управляющий сигнал 22 (все активные элементы возбуждения феррозонда переводятся в малопотребляющий режим до следующего цикла измерения) и формирует управляющий сигнал 25 на своем втором выходе 14, инициализирующий фазу аналого-цифрового преобразования в АЦП 11 амплитуды напряжения, зафиксированного амплитудным детектором 9. Цифровой код с выхода АЦП 11 передается на групповой вход 13 микроконтроллера 2 для дальнейшей обработки в соответствии с алгоритмом работы программы.
В момент времени t3 микроконтроллер 2 снимает управляющий сигнал 25 (все активные элементы аналого-цифрового преобразования переводятся в малопотребляющий режим до следующего цикла измерения) и считывает цифровой код с группового входа 13.
По исходным данным цифрового кода АЦП 11 вычисляется цифровой код компенсации для ЦАП 10, который используется в следующем цикле измерения.
Исходными данными для дальнейшей обработки в зависимости от алгоритма работы программы может быть как цифровой код АЦП 11, так и цифровой код на групповом выходе 15 микроконтроллера 2. Цифровой код на групповом выходе 15 пропорционален абсолютному значению вектора магнитной индукции, направление которого совпадает с направлением рабочей оси феррозонда, а цифровой код с выхода АЦП 11 может использоваться для выделения переменной составляющей этого вектора магнитной индукции. Например, для научных измерений наибольший интерес представляет цифровой код на групповом выходе 15, а для магнитометрических средств обнаружения - цифровой код с выхода АЦП 11.
Полученные исходные данные обрабатываются программой микроконтроллера 2 (например, пропускаются через цифровой фильтр, подвергаются сжатию, из них выделяются специфические признаки сигнала) для определения информации, которая по радиоканалу связи 19 с помощью радиомодема 3 и/или по проводной линии связи 20 с помощью модуля приема-передачи 4 передается в центр сбора и обработки информации.
В представленном устройстве длительность цикла измерения tизм зависит от характеристик используемых элементов, а период запуска циклов измерения Тзап может быть произвольным, однако для эффективного подавления помех, создаваемых промышленным оборудованием, целесообразно частоту запуска циклов измерения делать кратной промышленной частоте. Устройство позволяет добиваться отношения Тзап/tизм равным 1000, что соответствует снижению тока потребления во столько же раз.
Кроме того, на время измерения цепь компенсации аналоговым коммутатором 6 отключается от обмотки считывания феррозонда, исключая тем самым шунтирующее действие обратной связи, что в конечном итоге увеличивает чувствительность устройства. Варианты исполнения:
1. Устройство, изображенное на фиг. 1.
2. Устройство, отличающееся от изображенного на фиг. 1 наличием двух или трех магнитометрических модулей ММ 1 с общей схемой управления. Вариант с тремя ММ представлен на фиг. 3.
В подтверждение заявленных характеристик был изготовлен макет устройства, элементы которого реализованы следующим образом.
Источником питания выбрана литиевая батарея номинальным напряжением 3,6 В и микросхема МСР1703Т-3002 фирмы «Microchip Technology Incorporated.
Аналоговый коммутатор 6 - микросхема ADG719BRT фирмы «Analog Devices Incorporated)).
Датчик феррозондовый - датчик индукции магнитного поля НВ0391.5-35 производства ООО "НПО ЭНТ" (Отделение средств магнитометрии, г. Санкт-Петербург).
Формирователь тока возбуждения 5 - микросхема ADG719BRT фирмы «Analog Devices Incorporated)).
Формирователь тока компенсации 8 - пассивные RC элементы и микросхема AD5664RBRM фирмы «Analog Devices Incorporated)).
Амплитудный детектор 9 - пассивные элементы диод и конденсатор.
Усилитель 7 - микросхема OPA836IDBV фирмы «Texas Instruments Incorporated)).
АЦП 11 - интегрированный на кристалле микроконтроллера.
Модуль приема-передачи 4 - микросхема MAX3471EUA фирмы «Мах-im Integrated Products)).
Микроконтроллер 2 - микросхема MSP430FR5739RHA фирмы «Texas Instruments Incorporated)).
Лабораторный макет устройства, собранный по предложенной схеме и работающий с Тзап=10 мс, потребляет не более 0,15 мА (в том числе суммарный ток возбуждения и компенсации не превышает 0,02 мА).
Таким образом, устройство, работающее непрерывно от стандартной батарейки емкостью 2000 мА/ч, проработает не менее 500 суток.
Введенные в известное устройство дополнительные признаки и функциональные связи позволяют придать предлагаемому устройству новые существенные свойства.
Источники информации
1. Ю.В. Афанасьев, Н.В. Студенцов, В.Н. Хорев, Е.Н. Чечурена, А.П. Щелкин. Средства измерений параметров магнитного поля. Л.: Энергия. Ленинградское отделение. 1972. Стр. 222.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометрическое устройство с ферромодуляционным преобразователем | 2017 |
|
RU2657339C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2006 |
|
RU2306554C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2018 |
|
RU2686519C1 |
| Феррозондовый компас | 1987 |
|
SU1569547A1 |
| Способ определения допустимости использования феррозонда в магнитометре | 2020 |
|
RU2749303C1 |
| Цифровой феррозондовый магнитометр | 1986 |
|
SU1437811A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МАГНИТНЫХ АНОМАЛИЙ | 2010 |
|
RU2448350C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ | 2013 |
|
RU2534424C1 |
| Двухканальный пропорционально-дифференциальный феррозонд | 2023 |
|
RU2817510C1 |
| Цифровой феррозондовый измеритель азимута | 1987 |
|
SU1492036A1 |

Изобретение относится к измерительной технике и может быть использовано для автоматического мониторинга магнитного поля Земли в труднодоступных местах, не имеющих стационарных источников питания. Устройство для автоматического мониторинга магнитных полей состоит из датчика феррозондового, изготовленного на одном ферромагнитном сердечнике с двумя намотанными обмотками - возбуждения и считывания, и формирователя тока возбуждения. Устройство содержит магнитометрический модуль, микроконтроллер, радиомодем и модуль приема-передачи. В магнитометрический модуль дополнительно к датчику феррозондовому и формирователю тока возбуждения включены: аналоговый коммутатор, усилитель, формирователь тока компенсации, амплитудный детектор АЦП и ЦАП. Технический результат – уменьшение тока потребления для увеличения времени автономной работы устройства от химических источников тока (батарей или аккумуляторов). 3 ил.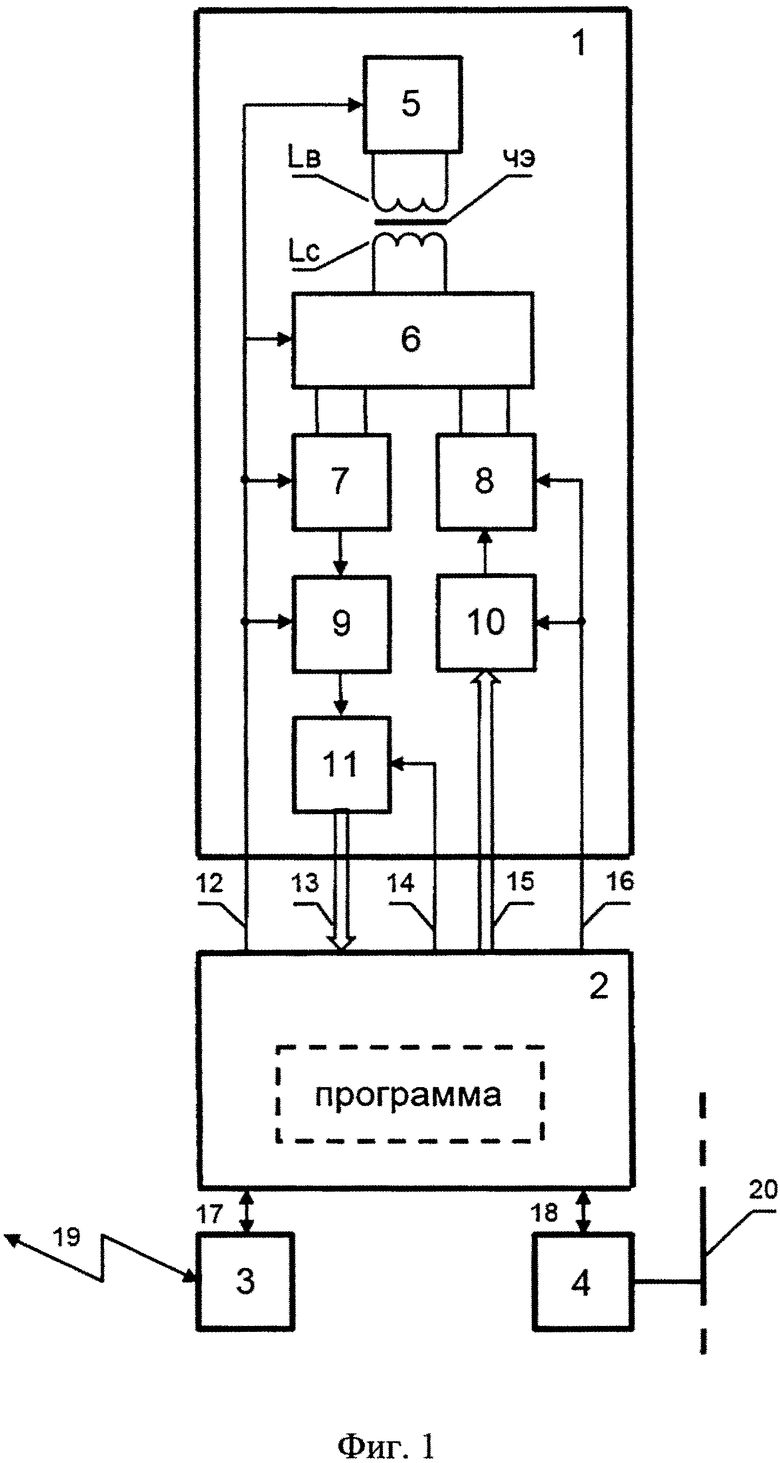
Устройство для автоматического мониторинга магнитных полей, содержащее датчик феррозондовый, изготовленный на одном ферромагнитном сердечнике с двумя намотанными обмотками - возбуждения и считывания, и формирователь тока возбуждения, групповой выход которого соединен с обмоткой возбуждения датчика феррозондового, отличающееся тем, что устройство содержит: магнитометрический модуль, микроконтроллер, радиомодем и модуль приема-передачи, в магнитометрический модуль дополнительно к датчику феррозондовому и формирователю тока возбуждения включены: аналоговый коммутатор, усилитель, формирователь тока компенсации, амплитудный детектор, АЦП и ЦАП, причем обмотка считывания датчика феррозондового подключена к групповому входу/выходу аналогового коммутатора, групповой выход которого подключен к групповому входу усилителя, выход которого подключен к первому входу амплитудного детектора, выход которого подключен к первому входу АЦП, групповой выход которого подключен к групповому входу микроконтроллера, групповой вход аналогового коммутатора подключен к групповому выходу формирователя тока компенсации, групповой вход которого подключен к групповому выходу ЦАП, групповой вход которого подключен к групповому выходу микроконтроллера, первый выход которого подключен ко входу формирователя тока возбуждения, ко входу аналогового коммутатора, ко входу усилителя и ко второму входу амплитудного детектора, второй выход микроконтроллера подключен ко второму входу АЦП, третий выход микроконтроллера подключен ко входу формирователя тока компенсации и ко входу ЦАП, первый вход/выход микроконтроллера подключен к входу/выходу радиомодема, второй вход/выход микроконтроллера подключен к первому входу/выходу модуля приема-передачи, второй вход/выход которого подключен к проводной линии связи.
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ МАГНИТНОГО ПОЛЯ | 2005 |
|
RU2290655C1 |
| RU 1757307 C, 10.07.1996 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 1998 |
|
RU2155968C2 |
| US 7372259 B1, 13.05.2008 | |||
| WO 2010098967 A1, 02.09.2010. | |||

