Изобретение относится к нефтяной и газовой промышленности и может быть использовано, в частности, для контроля состояния металла трубопроводов, например, в нефтегазовой промышленности, в условиях эксплуатации без производства вскрышных работ и какого-либо воздействия на металл труб.
В процессе функционирования нефтегазовых коммуникаций под действием различных внешних факторов и условий эксплуатации в металле трубопроводов образуются различного рода дефекты, которые развиваются и со временем приводят к авариям на трубопроводах. Поэтому упреждение разрушения металла на уровне зарождения дефектов является необходимым условием долговременной безаварийной работы систем трубопроводов.
Известно устройство бесконтактного магнитометрического контроля состояния металла трубопроводов (см. Полезная модель РФ №11608 от 26.03.1999, опубликована в Бюллетене Изобретений №10 от 16.10.1999), содержащее кварцевый генератор, делитель частоты, триггер Шмидта, формирователь линейной функции, пороговое устройство, цифровой индикатор, датчики регистрации откликов магнитного поля металла (феррозонды), индивидуальные каналы его функционального преобразования в электрический сигнал, образованные последовательно соединенными феррозондами, усилителями и синхронными детекторами, блок электронных ключей, аналоговый преобразователь, блок модуля, аналогово-цифровой преобразователь, буфер мощности, узел перебора пределов, узел перебора чувствительности, узел обнуления фона, блок управления, автоматический индикатор разряда батарей и светозвуковую индикацию превышения порога.
Вышеуказанное устройство является наиболее близким к заявляемому изобретению и может быть взято в качестве прототипа. К недостаткам вышеуказанного устройства следует отнести относительно низкие оперативность, точность и эффективность контроля состояния металла трубопроводов, обусловленные: необходимостью пространственного перемещения устройства для измерения не менее информативных нормальной тангенциальной и продольной составляющих магнитного поля трубопровода в точке измерения, приводящее к низкой оперативности контроля и неточной оценке этих составляющих вследствие изменения положения устройства; отсутствием оперативного контроля положения оси и глубины залегания трубопровода в точке измерения, что приводит к ошибкам, связанным с неточной установкой устройства относительно оси трубопровода, и скачкам показаний устройства, вызванным неровностью поверхности, на которой проходит контроль; низкой точностью пространственной установки устройства в точке измерения.
Решаемой технической задачей является создание устройства бесконтактного магнитометрического контроля состояния металла трубопроводов, позволяющее улучшить оперативность, точность и эффективность контроля за счет измерения всех составляющих магнитного поля трубопровода в точке измерения, оперативного контроля положения оси и глубины залегания трубопровода в точке измерения, увеличения точности пространственного положения устройства в момент измерения.
Достигаемый технический результат - повышение эффективности, оперативности контроля путем измерения всех компонент магнитного поля трубопровода, точности измерений путем проведения контроля пространственного положения устройства и контроля оси и глубины залегания трубопровода.
Технический результат достигается тем, что устройство бесконтактного магнитометрического контроля состояния металла трубопроводов, содержащее два отдельных блока феррозондовых магнитометров, жестко соединенных между собой, каждый из которых содержит первый феррозондовый датчик, первый усилитель и первый синхронный детектор, соединенные последовательно, первый блок возбуждения феррозондовых датчиков, включающий в себя последовательно соединенные кварцевый генератор, делитель частоты, триггер Шмидта, формирователь линейной функции, буфер мощности, выход которого соединен с входом первого феррозондового датчика первого блока феррозондового магнитометра, второй вход первого синхронного детектора первого блока феррозондового магнитометра соединен со вторым выходом делителя частоты первого блока возбуждения феррозондовых датчиков, блок электронных ключей, индикатор, блок управления. Новым является то, что дополнительно введен блок определения положения, на котором жестко установлены первый и второй блоки феррозондовых магнитометров, в каждый из которых дополнительно введены второй феррозондовый датчик, второй усилитель, второй синхронный детектор, второй интегратор, соединенные последовательно, третий феррозондовый датчик, третий усилитель, третий синхронный детектор, третий интегратор, соединенные последовательно, в каждый блок феррозондовых магнитометров дополнительно введены два первых интегратора, входы которых подключены к выходам первых синхронных детекторов каждого блока феррозондовых магнитометров, первый, второй и третий преобразователи напряжение-ток, выходы которых соответственно соединены с выводами обмоток компенсации, дополнительно введенными в первый, второй и третий феррозондовые датчики каждого блока феррозондовых магнитометров, а входы первого, второго и третьего преобразователей напряжение-ток каждого блока феррозондовых магнитометров соединены с первыми выходами первого, второго и третьего интеграторов каждого блока феррозондовых магнитометров, дополнительно введен идентичный первому блоку второй блок возбуждения феррозондовых датчиков, в котором второй выход делителя частоты соединен со вторыми входами первого, второго и третьего синхронных детекторов второго блока феррозондовых магнитометров, а выход буфера мощности соединен со входами первого, второго и третьего феррозондовых датчиков второго блока феррозондовых магнитометров, входы второго и третьего феррозондовых датчиков первого блока феррозондовых магнитометров соединены с выходом буфера мощности первого блока возбуждения феррозондовых датчиков, в котором второй выход делителя частоты соединен со вторыми входами второго и третьего синхронных детекторов первого блока феррозондовых магнитометров, в котором вторые выходы первого, второго и третьего интеграторов соединены с первым, вторым и третьим входом блока электронных ключей соответственно, четвертый, пятый и шестой входы которого соединены соответственно со вторыми выходами первого, второго и третьего интеграторов второго блока феррозондовых магнитометров, выход блока электронных ключей соединен с первым входом дополнительно введенного блока управления и обработки, второй вход которого соединен с блоком управления, третий вход подключен к индикатору, дополнительно введен блок определения оси и глубины заложения трубопровода, состоящего из последовательно соединенных избирательного усилителя, блока ступенчатой регулировки усиления и коммутатора, первый и второй входы которого соединены через первый и второй предварительные усилители с выходами первого и второго идентичных индукционных датчиков магнитного поля, выход избирательного усилителя соединен с четвертым входом блока управления и обработки, второй и третий выходы которого соединены соответственно с третьим и вторым входами коммутатора и блока ступенчатой регулировки усиления, при этом седьмой вход блока электронных ключей соединен с первым выходом блока управления и обработки, индукционные датчики магнитного поля жестко связаны между собой и установлены вдоль прямой, являющейся продолжением радиуса трубопровода, при этом оси чувствительности первого и второго индукционных датчиков параллельны между собой и противоположно направлены и расположены в плоскости, перпендикулярной трубопроводу, при этом они коллинеарны жестко связанным между собой осям чувствительности вторых феррозондовых датчиков каждого блока феррозондовых магнитометров, оси чувствительности первого, второго и третьего феррозондовых датчиков в каждом блоке феррозондовых магнитометров взаимно перпендикулярны между собой, причем оси чувствительности каждого феррозондового датчика первого блока феррозондовых магнитометров коллинеарны осям чувствительности соответствующих феррозондовых датчиков второго блока феррозондовых магнитометров, блок определения положения включает в себя три индикатора уровня, при этом оси чувствительности индикаторов уровня расположены взаимно перпендикулярно между собой и коллинеарны осям чувствительности первым, вторым и третьим феррозондовым датчикам каждого блока.
Введение в устройство бесконтактного магнитометрического контроля состояния металла трубопроводов феррозондовых магнитометров с обмотками компенсации, интеграторов, преобразователей напряжение-ток, второго блока возбуждения феррозондовых датчиков, блока определения оси и глубины заложения трубопровода, блока управления и обработки, блока определения положения позволяет измерять нормальную тангенциальную и продольную составляющие магнитного поля трубопровода в точке измерения без перемещения устройства, ввести автоматическую регулировку усиления по каждому каналу феррозондовых магнитометров, которое облегчает процесс измерения, оперативно контролировать положение устройства относительно оси трубопровода, автоматически рассчитывать и контролировать глубину заложения трубопровода.
Объединение феррозондовых магнитометров в два блока и предложенная выше ориентация осей чувствительности феррозондовых датчиков позволяет контролировать не только дефекты трубопровода, вызванные осевым растяжением или сжатием, но и дефекты, вызванные скручиванием трубопроводов.
Использование блока определения положения, состоящего из индикаторов уровня, на котором установлены первый и второй феррозондовые блоки магнитометров, ориентация их осей чувствительности коллинеарно осям чувствительности соответствующих феррозондовых датчиков позволяет оперативно контролировать пространственное положение устройства в точке измерения относительно вектора силы тяжести.
Новая совокупность существенных признаков позволяет повысить эффективность и точность магнитометрического контроля состояния металла трубопроводов.
Изобретение поясняется фигурой 1, на которой отображена структурная схема устройства бесконтактного магнитометрического контроля состояния металла трубопроводов. Устройство бесконтактного магнитометрического контроля состояния металла трубопроводов содержит два отдельных блока феррозондовых магнитометров 1, 2, жестко соединенных между собой. Блок феррозондовых магнитометров 1 содержит первый феррозондовый датчик 3, первый усилитель 5, первый синхронный детектор 7 и первый интегратор 35, соединенные последовательно, второй феррозондовый датчик 19, второй усилитель 21, второй синхронный детектор 23 и второй интегратор 25 соединенные последовательно, третий феррозондовый датчик 27, третий усилитель 29, третий синхронный детектор 31 и третий интегратор 33, соединенные последовательно. Первый выход каждого интегратора 35, 25, 33 соединены со входами преобразователей напряжение-ток 37, 38, 39 соответственно. Выход каждого преобразователя напряжение-ток подключены к выводам обмоток компенсации феррозондовых датчиков 3, 19, 27 первого блока феррозондовых магнитометров соответственно. Блок феррозондовых магнитометров 2 содержит первый феррозондовый датчик 4, первый усилитель 6, первый синхронный детектор 8 и первый интегратор 36, соединенные последовательно, второй феррозондовый датчик 20, второй усилитель 22, второй синхронный детектор 24 и второй интегратор 26, соединенные последовательно, третий феррозондовый датчик 28, третий усилитель 30, третий синхронный детектор 32 и третий интегратор 34, соединенные последовательно. Первый выход каждого интегратора 36, 26, 34 соединены со входами преобразователей напряжение-ток 40, 41, 42 соответственно. Выход каждого преобразователя напряжение-ток подключены к выводам обмоток компенсации феррозондовых датчиков 4, 20, 28 второго блока феррозондовых магнитометров соответственно. Первый блок возбуждения феррозондовых датчиков 9 включает в себя последовательно соединенные кварцевый генератор 10, делитель частоты 11, триггер Шмидта 12, формирователь линейной функции 13, буфер мощности 14, выход которого соединен со входом первого 3, второго 6 и третьего 27 феррозондовых датчиков первого блока феррозондового магнитометра 1. Второй вход первого синхронного детектора 7, второго синхронного детектора 23 и третьего синхронного детектора 31 первого блока феррозондового магнитометра 1, соединен со вторым выходом делителя частоты И первого блока возбуждения феррозондовых датчиков 9. Второй блок возбуждения феррозондовых датчиков 43 включает в себя последовательно соединенные кварцевый генератор 44, делитель частоты 45, триггер Шмидта 46, формирователь линейной функции 47, буфер мощности 48, выход которого соединен со входом первого 4, второго 20 и третьего 28 феррозондовых датчиков второго блока феррозондового магнитометра 2. Второй вход первого синхронного детектора 8, второго синхронного детектора 24 и третьего синхронного детектора 32 второго блока феррозондового магнитометра 2 соединен со вторым выходом делителя частоты 45 второго блока возбуждения феррозондовых датчиков 43. Первый 1 и второй 2 блоки феррозондовых магнитометров жестко установлены на блоке определения положения 18.
Выходы первого 35, второго 25 и третьего 33 интеграторов первого блока феррозондовых магнитометров 1 соединены с первым, вторым и третьим входом блока электронных ключей 15 соответственно, четвертый, пятый и шестой входы которого соединены соответственно со вторыми выходами первого 36, второго 26 и третьего 34 интеграторов второго блока феррозондовых магнитометров 2, выход блока электронных ключей 15 соединен с первым входом блока управления и обработки 49, второй вход которого соединен с блоком управления 17, третий вход подключен к индикатору 16. Блок определения оси и глубины заложения трубопровода 50 состоит из последовательно соединенных избирательного усилителя 51, блока ступенчатой регулировки усиления 52 и коммутатора 53, первый и второй вход которого соединен через первый 54 и второй 55 предварительные усилители с выходами первого 56 и второго 57 идентичных индукционных датчиков магнитного поля, выход избирательного усилителя 51 соединен с четвертым входом блока управления и обработки 49, второй и третий выходы которого соединены соответственно с третьим и вторым входами коммутатора 53 и блока ступенчатой регулировки усиления 52, при этом седьмой вход блока электронных ключей 15 соединен с первым выходом блока управления и обработки 49. Индукционные датчики магнитного поля 56, 57 жестко связаны между собой и установлены вдоль прямой, являющейся продолжением радиуса трубопровода, при этом оси чувствительности первого 56 и второго 57 индукционных датчиков параллельны между собой и противоположно направлены и расположены в плоскости перпендикулярной трубопроводу, при этом они коллинеарны жестко связанным между собой осям чувствительности вторых 19, 20 феррозондовых датчиков каждого блока феррозондовых магнитометров 1, 2, оси чувствительности первого 3, второго 19 и третьего 27 феррозондовых датчиков в каждом блоке феррозондовых магнитометров 1, 2 взаимно перпендикулярны между собой, причем оси чувствительности каждого феррозондового датчика первого блока феррозондовых магнитометров 1 коллинеарны осям чувствительности соответствующих феррозондовых датчиков второго блока феррозондовых магнитометров 2. Блок определения положения 18 включает в себя три индикатора уровня, при этом оси чувствительности индикаторов уровня расположены взаимно перпендикулярно между собой и коллинеарны осям чувствительности первым 3, 4, вторым 19, 20 и третьим 27, 28 феррозондовым датчикам каждого блока 1, 2.
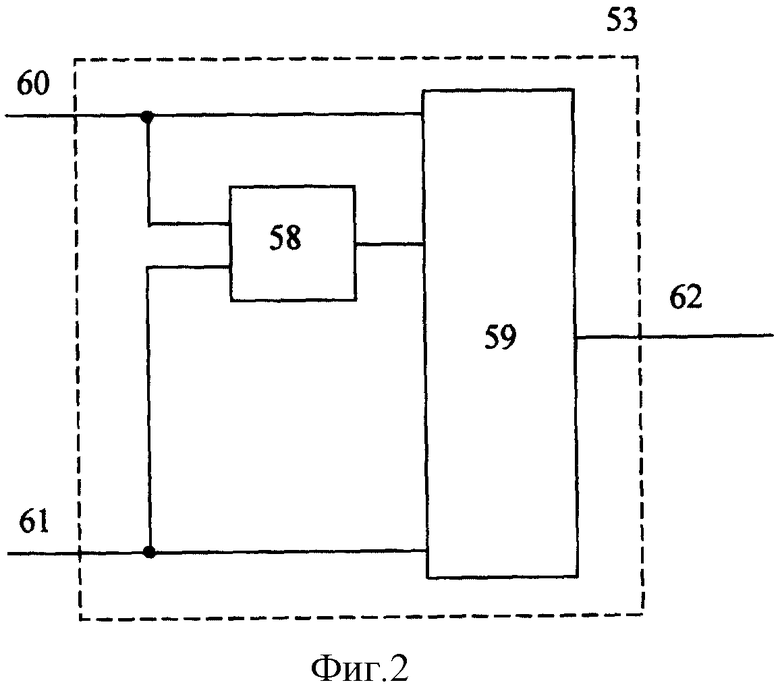
Структурная схема коммутатора, входящего в состав блока определения оси и глубины залегания трубопровода изображена на фигуре 2. Коммутатор содержит разностный усилитель 58, выход которого соединен со вторым входом переключателя рода работ 56, первый и второй входы коммутатора 60 и 61 подключены к выходам первого 54 и второго 55 предварительных усилителей соответственно, выход коммутатора 62 подключен к первому входу блока ступенчатой регулировки усиления.
Предлагаемое устройство работает следующим образом. При механическом стохастическом нагружении трубопровода доменная структура металла изменяется и не скомпенсированная на момент нагружения энергия вследствие движения стенок Блоха выделяется в виде свободной магнитной энергии. Импульсы магнитной энергии при стохастическом нагружении металла образуют сплошной спектр квазипостоянной компоненты собственного магнитного поля трубопровода, которое воспринимают феррозондовые датчики 3, 19, 27 первого блока феррозондовых магнитометров 1 и феррозондовые датчики 4, 20, 28 второго блока феррозондовых магнитометров 2. Феррозондовые датчики в каждом блоке феррозондовых магнитометров возбуждаются напряжением линейной функцией треугольной формы, которое поступает с выходов соответствующих блоков возбуждения феррозондовых датчиков 9, 43. Датчики 3, 19, 27 первого блока феррозондовых магнитометров 1 и датчики 4, 20, 28 второго блока феррозондовых магнитометров 2 выдают сигналы, амплитуды которых пропорциональны напряженности магнитного поля объектов контроля. Выходные сигналы датчиков 3, 19, 27 первого блока феррозондовых магнитометров 1 и датчиков 4, 20, 28 второго блока феррозондовых магнитометров 2 поступают на усилители 5, 21, 29 первого блока феррозондовых магнитометров 1 и усилители 6, 22, 30 второго блока феррозондовых магнитометров 2 соответственно. С выходов усилителей усиленные сигналы следуют на измерительные входы синхронных детекторов 7, 23, 31 первого блока феррозондовых магнитометров 1 и 8, 24, 32 второго блока феррозондовых магнитометров 2 соответственно. На управляющие входы синхронных детекторов 7, 23, 31 первого блока феррозондовых магнитометров 1 поступают опорные частоты с кварцевого генератора 10 через делитель частоты 11 первого блока возбуждения феррозондовых датчиков 9. Импульсы опорной частоты, пройдя через триггер Шмидта 12, преобразуются в линейную функцию напряжения возбуждения датчиков в формирователе линейной функции 13 и поступают в буфер мощности 14 первого блока возбуждения феррозондовых датчиков 9. С выхода которого напряжение возбуждения подается на обмотки возбуждения феррозондовых датчиков 3, 19, 27 первого блока феррозондовых магнитометров 1, в измерительных обмотках которых квазипостоянная компонента напряженности исследуемого магнитного поля преобразуется в переменное напряжение. Аналогично детектируются сигналы, поступающие на входы синхронных детекторов 8, 24 и 32 второго блока феррозондовых магнитометров 2. На управляющие входы синхронных детекторов 8, 24, 32 поступают опорные частоты с кварцевого генератора 44 через делитель частоты 45 второго блока возбуждения феррозондовых датчиков 43. Импульсы опорной частоты, пройдя через триггер Шмидта 46, преобразуются в линейную функцию напряжения возбуждения датчиков в формирователе линейной функции 47 и поступают в буфер мощности 48 второго блока возбуждения феррозондовых датчиков 43, с выхода которого напряжение возбуждения подается на обмотки возбуждения феррозондовых датчиков 4, 20, 28 второго блока феррозондовых магнитометров 2, в измерительных обмотках которых квазипостоянная компонента напряженности исследуемого магнитного поля преобразуется в переменное напряжение.
Аналоговые сигналы с выходов синхронных детекторов 7, 23, 31 первого блока феррозондовых магнитометров 1 и выходов 8, 24, 32 второго блока феррозондовых магнитометров 2 поступают на входы интеграторов 35, 25, 33 первого блока феррозондовых магнитометров 1 и входы интеграторов 36, 26, 34 второго блока феррозондовых магнитометров 2, где они дополнительно фильтруются и подаются на вход соответствующих преобразователей напряжение-ток 37, 38, 39 и 40, 41, 42 соответственно. При этом часть выходного напряжения интеграторов, пропорциональная величине измеряемого магнитного поля, преобразуется в ток и подается в обмотки компенсации феррозондовых датчиков 3, 19, 27 первого блока феррозондовых магнитометров 1 и 4, 20, 28 второго блока феррозондовых магнитометров 2. Обмотки компенсации феррозондовых датчиков 3, 19, 27 и 4, 20, 28 включены встречно измеряемому полю. Таким образом, осуществляется обратная связь по полю, которая приводит к устойчивой работе блоков феррозондовых магнитометров и автоматической регулировке усиления каналов: измеряемая компонента магнитного поля - электрический сигнал. Вторые выходы интеграторов 35, 25, 33 первого блока феррозондовых магнитометров 1 и вторые выходы интеграторов 36, 26, 34 второго блока феррозондовых магнитометров 2 подключены к 1, 2, 3, 4, 5 и 6 входам блока электронных ключей 15 соответственно. Блок электронных ключей 15 по сигналу, поступающему от блока управления и обработки 49 поочередно подключает к входу блока управления и обработки каждый из выходов интеграторов каждого блока феррозондовых магнитометров. В блоке управления и обработки сигналы, пропорциональные магнитному полю трубопровода, последовательно обрабатываются и оцифровываются с помощью аналого-цифрового преобразователя.
Взаимно перпендикулярное размещение осей чувствительности датчиков в каждом блоке позволяет измерять полный вектор магнитного поля трубопровода, вызванное продольными, поперечными (кольцевыми и осевыми) напряжениями растяжения или сжатия. Привязка вторых осей чувствительности феррозондовых датчиков каждого блока феррозондовых магнитометров к осям чувствительности индукционных датчиков магнитного поля блока определения оси и глубины заложения трубопровода позволяет уменьшить погрешность измерения компонент магнитного поля трубопровода, связанную с неточной установкой устройства относительно оси трубопровода и неровностями поверхности, на которой проходят измерения. Размещение первого и второго блоков феррозондовых магнитометров на штанге с жестко закрепленным блоком определения положения, ориентация осей чувствительности которого привязаны к осям чувствительности феррозондовых датчиков первого и второго блоков феррозондовых магнитометров, позволяет контролировать при измерениях пространственное положение устройства относительно вектора силы тяжести. Продольная поперечная и тангенциальная составляющие собственного магнитного поля трубопровода является экспериментально определенной информационными характеристиками, отражающими пространственное местоположение дефектного участка. Для решения различных прикладных задач поиска и идентификации дефектов и повышения эффективности контроля, уменьшения влияния на результаты измерений внешнего однородного магнитного поля Земли блоки феррозондовых магнитометров жестко закреплены между собой. С целью реализации наибольшей чувствительности датчиков при контроле трубопроводов различных диаметров в устройстве предусмотрена возможность изменять расстояние между блоками феррозондовых магнитометров.
Для поиска оси и глубины заложения трубопровода в устройство дополнительно введен блок определения оси и глубины заложения трубопровода 50, который работает следующим образом.
Избирательный усилитель 51 настраивается на частоту измеряемого тока (на вторую гармонику сетевого напряжения при работе со станцией катодной защиты) или на частоту генератора, подключенного выходными клеммами к трубопроводу и заземлению. При этом значение частоты выбирается на блоке управления 17, подключенного к блоку управления и обработки 49, который на входе управления избирательного усилителя 51 устанавливает код частоты измеряемого сигнала. Одновременно блок управления и обработки 49 в зависимости от поступающего сигнала с выхода блока избирательного усилителя 51 увеличивает или уменьшает коэффициент усиления блока ступенчатой регулировки усиления 52. Задача определения оси и глубины заложения трубопровода решается последовательно с помощью различных управляющих сигналов, поступающих от блока управления и обработки на коммутатор 53.
В случае поиска местоположения оси трубопровода (поиска по максимуму) блок управления и обработки 49 подключает на выход 62 коммутатора 53 только сигнал с входа 61, подключенного к выходу усилителя предварительного 55, который в свою очередь подключен к нижнему индукционному датчику 57. При перемещении и повороте устройства перпендикулярно трубопроводу устройство 49 запоминает максимальное значение сигнала D2, поступающего с выхода предварительного усилителя 55, подключенного к индукционному датчику 57, сигнал на выходе которого пропорционален горизонтальной составляющей магнитного поля, возбуждаемого током станции катодной защиты или генератором, подключенным к трубопроводу. На индикатор 16 выводится шкала, длина которой пропорциональна величине сигнала с выхода индукционного датчика 57 и проценту отклонения от значения максимально зафиксированного сигнала.
В результате поиска по максимуму устройство располагается над осью трубопровода таким образом, что индукционные датчики 56 и 57 находятся в плоскости, перпендикулярной оси трубопровода.
В случае измерения глубины заложения трубопровода устройство располагают так, чтобы индукционные датчики 56 и 57 располагались в плоскости, перпендикулярной трубопроводу (режим нахождения оси трубопровода), затем производят измерение глубины залегания трубопровода (расстояние от нижнего индукционного датчика 57 до оси трубы).
При измерении глубины с выхода 62 коммутатора последовательно поступают сигналы:
D1 - сигнал на входе 60 коммутатора, подключенного к выходу усилителя предварительного 54, который в свою очередь подключен к индукционному датчику 56;
D12 - сигнал на выходе разностного усилителя 58, который формирует разность сигналов D1 и D2, умноженную на Кр (коэффициент усиления разностного усилителя 58).
При этом на выходе избирательного усилителя 51 последовательно формируются следующие сигналы:


где а - расстояние между 1 и 2 датчиками;
h - расстояние от нижнего датчика до оси трубопровод (глубина);
G1 и G2 - коэффициенты преобразования датчиков 1 и 2 соответственно (чувствительность),  ;
;
K1 и K12 - коэффициенты усиления, установленные в ступенчатом регуляторе усиления при усилении сигналов D1 и D2 соответственно;
Кy - коэффициент усиления усилителя предварительного;
Кp - коэффициент усиления разностного усилителя 58;
I - ток в трубопроводе.
На основании формул (1) и (2) получаем:

где 

По формулам (3) и (4) блок управления и обработки 49 рассчитывает глубину залегания трубопровода h.
При большом сигнале D1 и маленькой глубине усиленная разность D12 получается слишком большой, поэтому в этом случае глубина измеряется при последовательном опросе сигналов D1 и D2, в результате чего на выходе избирательного усилителя 51 последовательно формируются сигналы U1 (см.(1)) и U2.

где К2 - коэффициент усиления, установленный в ступенчатом регуляторе усиления 52.
На основании формул (1) и (5) получаем:

По формулам (6) и (3) устройство 49 рассчитывает глубину залегания трубопровода в случае большого сигнала D2 и маленькой глубины.
Феррозондовые датчики с обмоткой компенсации, усилители, синхронные детекторы, интеграторы, преобразователи напряжение-ток, входящие в состав блоков феррозондовых магнитометров 1 и 2, а также кварцевый генератор, делитель частоты, триггер Шмидта, формирователь линейной функции, буфер мощности, входящие в состав первого и второго блока возбуждения феррозондовых датчиков 9 и 43, выполнены по типичной схеме феррозондовых магнитометров для измерения низкочастотных магнитных полей [см. Афанасьев Ю.В. Феррозондовые магнитометры. Л.: Энергоатомиздат, Ленинградское отделение, 1986 - 128 с.]. Блок определения положения может быть выполнен на трех индикаторов уровня пузырькового типа. Блок электронных ключей выполнен на ключах ADG433 и ADG409, имеющих очень низкое сопротивление открытого канала и хорошее качество изоляции между каналами, что обеспечивает передачу сигнала на выход блока электронных ключей без искажений.
Антенная система блока определения оси и глубины заложения трубопровода, состоящая из 2 индукционных датчиков, выполнена на ферритовых сердечниках марки НМ-700. Измерительные датчики 56 и 57 имеют равное количество витков и одинаковые коэффициенты преобразования G1 и G2. Поскольку абсолютно одинаковые коэффициенты получить невозможно, необходимо знать отношение . При этом точность определения глубины  зависит от относительной точности определения К следующим образом:
зависит от относительной точности определения К следующим образом:

Как видно из формулы (7), чем больше расстояние а между датчиками 56 и 57, тем выше точность при измерении глубины. Расстояние между датчиками 56 и 57 выбрано равным 350 мм.
Предполагается, что система может работать в диапазоне температур -20...+40 С. В таких условиях происходят отклонение К от заданного, что обусловлено температурной нестабильностью магнитной проницаемости феррита марки 700 НМ, она наиболее низкая по сравнению с другими марками и составляет ±5%. Как показано в [Мизюк Л.Я. Входные преобразователи для измерения напряженности низкочастотных магнитных полей. Киев. 1964 - с.115] нестабильность проницаемости сердечника уменьшается по сравнению с нестабильностью проницаемости материала в μ·N (где μ - проницаемость материала, N - коэффициент размагничивания сердечника). Коэффициент размагничивания сердечника зависит в основном от отношения  (где l - длина сердечника, d - диаметр сердечника). Для получения 10% точности измерения глубины выбран сердечник со следующими геометрическими характеристиками: длина сердечника составляет 100 мм, диаметр 10 мм.
(где l - длина сердечника, d - диаметр сердечника). Для получения 10% точности измерения глубины выбран сердечник со следующими геометрическими характеристиками: длина сердечника составляет 100 мм, диаметр 10 мм.
При временном уходе К от заданного значения новое значение К можно ввести в устройство управления и обработки с клавиатуры.
Блок определения оси и глубины заложения трубопровода собран на микромощных операционных усилителях, обеспечивающих необходимую точность измерений и обладающих низким энергопотреблением, что важно для работы в полевых условиях.
Усилители предварительные 54, 55 выполнены на базе инструментального усилителя AD620, что обеспечивает большой коэффициент подавления синфазной наводки на выводы датчиков 56 и 57.
Разностный усилитель 58 выполнен на базе инструментального усилителя AD620, что обеспечивает высокую точность получения разностных сигналов.
Переключатель рода работ 59 выполнен на ключах ADG433 и ADG409, имеющих очень низкое сопротивление открытого канала и хорошее качество изоляции между каналами, что обеспечивает передачу сигнала на выход коммутатора без искажений.
Блок ступенчатого регулятора усиления 52 выполнен на базе программируемого усилителя AD526, причем на него поступает предварительно отфильтрованный сигнал, для того чтобы помехи не усиливались. Количество ступеней блока ступенчатого регулятора усиления - 9, необходимый коэффициент усиления (1, 2, 4, 8, 16, 64, 128 или 256) задается блоком управления и обработки 49 в зависимости от величины сигнала на его входе.
Избирательный усилитель 51 выполнен по схеме биквадратного активного фильтра, и настраиваются на частоту измеряемого поля. Усилитель 51 может настраиваться на частоту 100 Гц при использовании станции катодной защиты, или на частоту 128 Гц или 640 Гц при использовании генератора специальных сигналов. Настройка происходит под управлением устройства 49.
Блок управления 17 имеет 7 кнопок, которые позволяют вводить необходимую информацию в устройство 49 и задавать режимы работы устройства.
Устройство 49 выполнено на базе PIC-процессора со встроенным многоканальным АЦП и работает по программе записанной в его память.
Разработанное устройство бесконтактного магнитометрического контроля состояния металла трубопроводов позволяет измерять шесть компонент вектора магнитного поля трубопровода. Диапазон измерений магнитного поля по каждой компоненте: -50...+50 А/м. Цена единицы младшего разряда измерения магнитного поля по каждой компоненте - не более 0,1 А/м - позволяет получить точность определения глубины залегания трубопровода ±10%, при токе, протекающем по трубопроводу не менее 20 мА, и максимальной глубине залегания трубопровода 3 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2011 |
|
RU2460068C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА КАТОДНОЙ ЗАЩИТЫ | 2008 |
|
RU2379673C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2177630C1 |
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ И ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ИХ ЗАЛЕГАНИЯ | 2003 |
|
RU2246742C1 |
| Устройство для измерения слабых геомагнитных полей | 1986 |
|
SU1347063A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2010 |
|
RU2437113C2 |
| Устройство для автоматического мониторинга магнитных полей | 2017 |
|
RU2643233C1 |
| ПРЕОБРАЗОВАТЕЛЬ ГЕОМАГНИТНОГО ПОЛЯ ДЛЯ ИНКЛИНОМЕТРА | 2002 |
|
RU2249790C2 |
| Магнитоизмерительный преобразователь | 1987 |
|
SU1531040A1 |
Изобретение относится к нефтяной и газовой промышленности и может быть использовано для контроля состояния металла трубопроводов. Технический результат: повышение эффективности, оперативности и точности измерений. Устройство содержит два блока феррозондовых магнитометров с тремя феррозондовыми датчиками, жестко соединенных между собой, блок электронных ключей, индикатор, блок управления, блок определения положения, на котором жестко установлены первый и второй блоки феррозондовых магнитометров, блок управления и обработки, индукционные датчики магнитного поля. Индукционные датчики жестко связаны между собой и установлены вдоль прямой, являющейся продолжением радиуса трубопровода. Оси чувствительности индукционных датчиков параллельны между собой, противоположно направлены, расположены в плоскости, перпендикулярной трубопроводу, и коллинеарны жестко связанным между собой осям чувствительности вторых феррозондовых датчиков каждого блока магнитометров. 2 ил.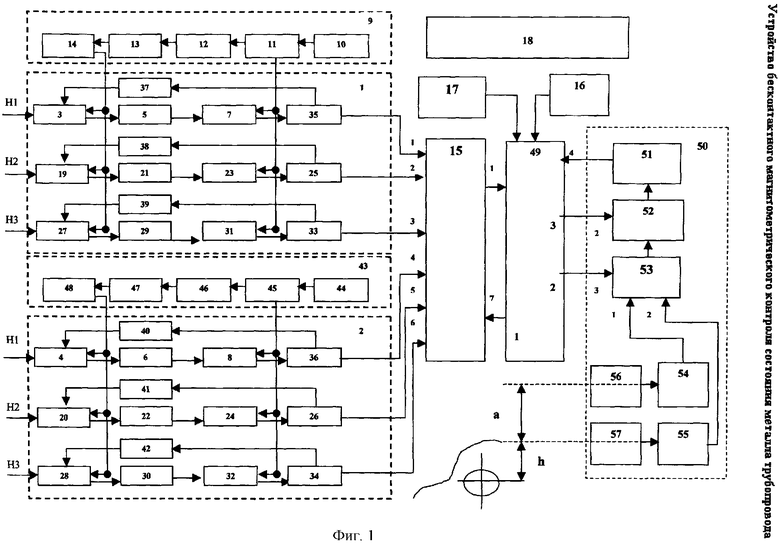
Устройство бесконтактного магнитометрического контроля состояния металла трубопроводов, содержащее два отдельных блока феррозондовых магнитометров, жестко соединенных между собой, каждый из которых содержит первый феррозондовый датчик, первый усилитель и первый синхронный детектор, соединенные последовательно, первый блок возбуждения феррозондовых датчиков, включающий в себя последовательно соединенные кварцевый генератор, делитель частоты, триггер Шмидта, формирователь линейной функции, буфер мощности, выход которого соединен со входом первого феррозондового датчика первого блока феррозондового магнитометра, второй вход первого синхронного детектора первого блока феррозондового магнитометра соединен со вторым выходом делителя частоты первого блока возбуждения феррозондовых датчиков, блок электронных ключей, индикатор, блок управления, отличающийся тем, что дополнительно введен блок определения положения, на котором жестко установлены первый и второй блоки феррозондовых магнитометров, в каждый из которых дополнительно введены второй феррозондовый датчик, второй усилитель, второй синхронный детектор, второй интегратор, соединенные последовательно, третий феррозондовый датчик, третий усилитель, третий синхронный детектор, третий интегратор, соединенные последовательно, в каждый блок феррозондовых магнитометров дополнительно введены два первых интегратора, входы которых подключены к выходам первых синхронных детекторов каждого блока феррозондовых магнитометров, первый, второй и третий преобразователи напряжение-ток, выходы которых соответственно соединены с выводами обмоток компенсации, дополнительно введенными в первый, второй и третий феррозондовые датчики каждого блока феррозондовых магнитометров, а входы первого, второго и третьего преобразователей напряжение-ток каждого блока феррозондовых магнитометров соединены с первыми выходами первого, второго и третьего интеграторов каждого блока феррозондовых магнитометров, дополнительно введен идентичный первому блоку второй блок возбуждения феррозондовых датчиков, в котором второй выход делителя частоты соединен со вторыми входами первого, второго и третьего синхронных детекторов второго блока феррозондовых магнитометров, а выход буфера мощности соединен со входами первого, второго и третьего феррозондовых датчиков второго блока феррозондовых магнитометров, входы второго и третьего феррозондовых датчиков первого блока феррозондовых магнитометров соединены с выходом буфера мощности первого блока возбуждения феррозондовых датчиков, в котором второй выход делителя частоты соединен со вторыми входами второго и третьего синхронных детекторов первого блока феррозондовых магнитометров, в котором вторые выходы первого, второго и третьего интеграторов соединены с первым, вторым и третьим входом блока электронных ключей соответственно, четвертый, пятый и шестой входы которого соединены соответственно со вторыми выходами первого, второго и третьего интеграторов второго блока феррозондовых магнитометров, выход блока электронных ключей соединен с первым входом дополнительно введенного блока управления и обработки, второй вход которого соединен с блоком управления, третий вход подключен к индикатору, дополнительно введен блок определения оси и глубины заложения трубопровода, состоящий из последовательно соединенных избирательного усилителя, блока ступенчатой регулировки усиления и коммутатора, первый и второй входы которого соединены через первый и второй предварительные усилители с выходами первого и второго идентичных индукционных датчиков магнитного поля, выход избирательного усилителя соединен с четвертым входом блока управления и обработки, второй и третий выходы которого соединены соответственно с третьим и вторым входами коммутатора и блока ступенчатой регулировки усиления, при этом седьмой вход блока электронных ключей соединен с первым выходом блока управления и обработки, индукционные датчики магнитного поля жестко связаны между собой и установлены вдоль прямой, являющейся продолжением радиуса трубопровода, при этом оси чувствительности первого и второго индукционных датчиков параллельны между собой и противоположно направлены и расположены в плоскости, перпендикулярной трубопроводу, при этом они коллинеарны жестко связанным между собой осям чувствительности вторых феррозондовых датчиков каждого блока феррозондовых магнитометров, оси чувствительности первого, второго и третьего феррозондовых датчиков в каждом блоке феррозондовых магнитометров взаимно перпендикулярны между собой, причем оси чувствительности каждого феррозондового датчика первого блока феррозондовых магнитометров коллинеарны осям чувствительности соответствующих феррозондовых датчиков второго блока феррозондовых магнитометров, блок определения положения включает в себя три индикатора уровня, при этом оси чувствительности индикаторов уровня расположены взаимно перпендикулярно между собой и коллинеарны осям чувствительности первым, вторым и третьим феррозондовым датчикам каждого блока.
| Устройство для получения звука | 1928 |
|
SU11608A1 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ ИЗДЕЛИЯ ИЗ ФЕРРОМАГНИТНОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2155943C2 |
| US 6239593 В1, 29.05.2001 | |||
| US 3949292 А, 06.04.1976. | |||

