ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[001] Данная заявка является обычной заявкой, заявляющей приоритет международной заявки PCT/CN2015/094446, дата международной подачи — 12 ноября 2015 г., все содержимое которой посредством ссылки включается в данное описание в прямой форме.
ОПОВЕЩЕНИЕ ОБ АВТОРСКОМ ПРАВЕ
[002] Часть раскрытия данного патентного документа содержит материал, охраняемый нормами авторского права. Владелец авторских прав не возражает против какого-либо воспроизведения кем-либо данного патентного раскрытия так, как оно встречается в патентных файлах и записях Ведомства по патентам и товарным знакам США, но в других обстоятельствах оставляет за собой все какие бы то ни было авторские права.
ПРЕДПОСЫЛКИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[003] Настоящее изобретение относится к интеллектуальному унитазу и, в частности, к системе и способу управления интеллектуальным унитазом.
ОПИСАНИЕ ИЗВЕСТНОГО УРОВНЯ ТЕХНИКИ
[004] Интеллектуальный унитаз создали в США для использования и ухода за пожилыми людьми, при этом первоначальный интеллектуальный унитаз был рассчитан на обеспечение функции гигиенической обработки теплой водой. После этого интеллектуальный унитаз был усовершенствован корейскими и японскими санитарно-техническими компаниями, и в этих странах была представлена производственная технология, предусматривающая многочисленные функции, в том числе функцию сиденья с подогревом, функцию гигиенической обработки теплой водой, функцию сушки теплым воздухом и функцию стерилизации. Существующий интеллектуальный унитаз обычно предусматривает функцию сиденья с подогревом, функцию гигиенической обработки теплой водой после пользования унитазом и функцию сушки теплым воздухом. Стоит упомянуть, что интеллектуальные унитазы первоначально были рассчитаны на медицинское обслуживание пожилых людей и медицинское обслуживание на дому. По мере того как интеллектуальные унитазы становятся более популярными, они могут находиться и использоваться в различных местоположениях. Однако по-прежнему существуют некоторые проблемы, которые в интеллектуальных унитазах решить не удалось.
[005] Крышку сиденья и сиденье унитаза у интеллектуальных унитазов в общественных уборных (таких как гостиничные номера или общественные туалеты) пользователь открывает и закрывает вручную, поэтому нельзя игнорировать потенциальные гигиенические проблемы. Поэтому для современного интеллектуального унитаза нужно рассмотреть бесконтактную автоматическую функцию откидывания сиденья унитаза и крышки сиденья. В дополнение, к интеллектуальному унитазу требуется приспособить отличающиеся требования для мужчин и женщин.
[006] Ранее для обнаружения объекта, приближающегося к интеллектуальному унитазу, с целью выполнения функции автоматического откидывания крышки был встроен инфракрасный датчик. Однако эксплуатационная долговечность инфракрасного датчика является краткой, и не может быть решена проблема интерференции инфракрасного датчика. В дополнение, для установки инфракрасного датчика в верхней поверхности крышки сиденья формируют отверстие, и, таким образом, через это отверстие может просачиваться вода, повреждающая инфракрасный датчик.
[007] В патенте Китая №CN200920199983.0 раскрыт интеллектуальный унитаз, содержащий сиденье унитаза и крышку сиденья с приспособлением для автоматического открывания и закрывания. Это сиденье унитаза и крышка сиденья шарнирно соединены друг с другом на унитазе посредством стержня сиденья и стержня крышки, при этом стержень сиденья и стержень крышки расположены на одной общей стержневой оси. В дополнение, этот интеллектуальный унитаз также содержит два отдельных двигателя, предусмотренные по отдельности соответственно на сиденье унитаза и на крышке сиденья. В частности, двигатель сиденья функционально связан со стержнем сиденья, тогда как двигатель крышки функционально связан со стержнем крышки сиденья. Каждый двигатель содержит пусковую схему и схему управления. Стержень сиденья и стержень крышки связаны друг с другом посредством зубчатой передачи. Стержень сиденья содержит ось стержня, втулку стержня и пружину, присоединенную между осью стержня и втулкой стержня, при этом с одним из концов оси стержня связан электромагнит. Посредством принципа электромагнитного механизма и принципа зубчатого механизма сиденье унитаза может приводиться в действие для открывания отдельно посредством запуска двигателя сиденья. В то же время крышка сиденья сконфигурирована для автоматического открывания и закрывания посредством датчика. Иными словами, сиденье унитаза нельзя привести в действие для поднятия по отдельности или вместе с крышкой сиденья. Поэтому пользователю по-прежнему требуется прикосновение и удерживание сиденья унитаза для того, чтобы поднять сиденье унитаза, поэтому вышеупомянутый интеллектуальный унитаз является неудобным и по-прежнему обладает потенциальными проблемами с загрязнителями.
КРАТКОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[008] Настоящее изобретение является преимущественным в том, что оно предусматривает систему и способ управления интеллектуальным унитазом, представляющим собой высокоинтеллектуальное устройство, являющееся простым в использовании и предотвращающее какое-либо загрязнение рук пользователя посредством прикосновения к интеллектуальному унитазу.
[009] Другим преимуществом изобретения является создание системы и способа управления интеллектуальным унитазом, в котором интеллектуальный унитаз содержит приводное устройство сиденья унитаза, приводное устройство крышки сиденья и схему управления, при этом схема управления содержит детектор пользователя, предназначенный для обнаружения присутствия пользователя, и микроконтроллер. Для сиденья унитаза и крышки сиденья может быть установлен мужской режим работы и женский режим работы. В мужском режиме работы в ответ на присутствие пользователя, обнаруживаемое детектором пользователя, микроконтроллер одновременно поднимает сиденье унитаза и крышку сиденья посредством приводного устройства сиденья унитаза и приводного устройства крышки сиденья. В женском режиме работы в ответ на присутствие пользователя, обнаруживаемое детектором пользователя, микроконтроллер поднимает только крышку сиденья посредством приводного устройства крышки сиденья.
[0010] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, если детектор пользователя обнаруживает отсутствие движения или отсутствие пользователя, микроконтроллер приводит в действие приводное устройство сиденья унитаза и приводное устройство крышки сиденья для наложения и связывания сиденья унитаза и крышки сиденья друг с другом в опущенном закрытом положении.
[0011] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, детектор пользователя представляет собой микроволновой детектор, и сиденье унитаза и крышку сиденья поднимает микроконтроллер. Схема управления содержит сенсорный переключатель, оставляющий руки свободными, при этом выходной конец этого сенсорного переключателя, оставляющего руки свободными, подключен к микроконтроллеру. В мужском режиме работы сенсорный переключатель, оставляющий руки свободными, представляет собой ножной сенсорный переключатель, которого пользователь касается ногой, и, таким образом, микроконтроллер опускает сиденье унитаза посредством приводного устройства сиденья унитаза.
[0012] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, детектор пользователя содержит два микроволновых детектора, при этом два конца этих двух микроволновых детекторов подключены к микроконтроллеру. Два микроволновых детектора расположены симметрично соответственно справа и слева от верхней крышки для обнаружения и анализа жеста пользователя (рука пользователя движется слева направо или справа налево) с целью отправки выходных сигналов из микроволновых детекторов в определенной последовательности с тем, чтобы определять, какой из режимов работы, мужской или женский, установить и привести в действие. Мужской режим работы и женский режим работы определяют выходные сигналы, генерируемые микроволновыми детекторами.
[0013] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, схема управления содержит сенсорный переключатель, оставляющий руки свободными, и выходные концы этого сенсорного переключателя, оставляющего руки свободными, подключены к микроконтроллеру. Если микроволновой детектор не обнаруживает какого-либо жеста пользователя, можно привести в действие сенсорный переключатель, оставляющий руки свободными, и микроконтроллер может посредством приведения в действие сенсорного переключателя, оставляющего руки свободными, поднимать сиденье унитаза и крышку сиденья посредством приводного устройства крышки сиденья и приводного устройства сиденья унитаза.
[0014] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, каждое приводное устройство, приводное устройство сиденья унитаза и приводное устройство крышки сиденья, содержит электродвигатель постоянного тока, схему управления двигателем и потенциометр, при этом два подвижных контакта потенциометра приводятся в движение электродвигателем постоянного тока. Два закрепленных конца сопротивления потенциометра подключены соответственно к положительному электроду источника питания и к заземлению. Подвижные контакты потенциометра воплощены как измерительные концы, соединенные с микроконтроллером с целью обнаружения угла как сиденья унитаза, так и крышки сиденья. Частоту вращения электродвигателя постоянного тока определяют посредством PMW. Когда сиденье унитаза и крышка сиденья поднимаются или опускаются, углы сиденья унитаза и крышки сиденья часто замеряются микроконтроллером посредством потенциометра, и, таким образом, можно вычислить угловые скорости сиденья унитаза и крышки сиденья. Когда угловые скорости сиденья унитаза и крышки сиденья превышают предопределенные значения, необходимо уменьшить коэффициенты заполнения электродвигателей постоянного тока.
[0015] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, процесс опускания как сиденья унитаза, так и крышки сиденья разделен на множество угловых сегментов, при этом первоначальная угловая скорость как сиденья унитаза, так и крышки сиденья имеет наивысшее значение, когда сиденье унитаза и крышка сиденья начинают опускаться. Конечная угловая скорость как сиденья унитаза, так и крышки сиденья имеет самое низкое значение, когда процесс опускания и сиденья унитаза, и крышки сиденья завершается. Процесс поднятия как сиденья унитаза, так и крышки сиденья разделен на множество угловых сегментов. Начальная угловая скорость как сиденья унитаза, так и крышки сиденья имеет наивысшие значения, когда сиденье унитаза и крышка сиденья начинают подниматься. Конечная угловая скорость как сиденья унитаза, так и крышки сиденья имеет самые низкие значения, когда процесс поднятия как сиденья унитаза, так и крышки сиденья завершен.
[0016] В соответствии с вышеупомянутым предпочтительным вариантом осуществления, как сиденье унитаза, так и крышка сиденья расположены под углом 0°, когда сиденье унитаза и крышка сиденья находятся в наложенном и связанном друг с другом состоянии, а угол как сиденья унитаза, так и крышки сиденья установлен на 120°, когда сиденье унитаза и крышка сиденья подняты. В процессе опускания как сиденья унитаза, так и крышки сиденья угол сиденья унитаза и крышки сиденья устанавливают между 120° и 75°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 70°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 75° и 40°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 35°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 40° и 0°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе опускания установлена при 25°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 0° и 40°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 70°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 40° и 80°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 35°/с. Угол сиденья унитаза и крышки сиденья устанавливают между 80° и 120°, когда угловая скорость сиденья унитаза и крышки сиденья в процессе поднятия установлена при 25°/с.
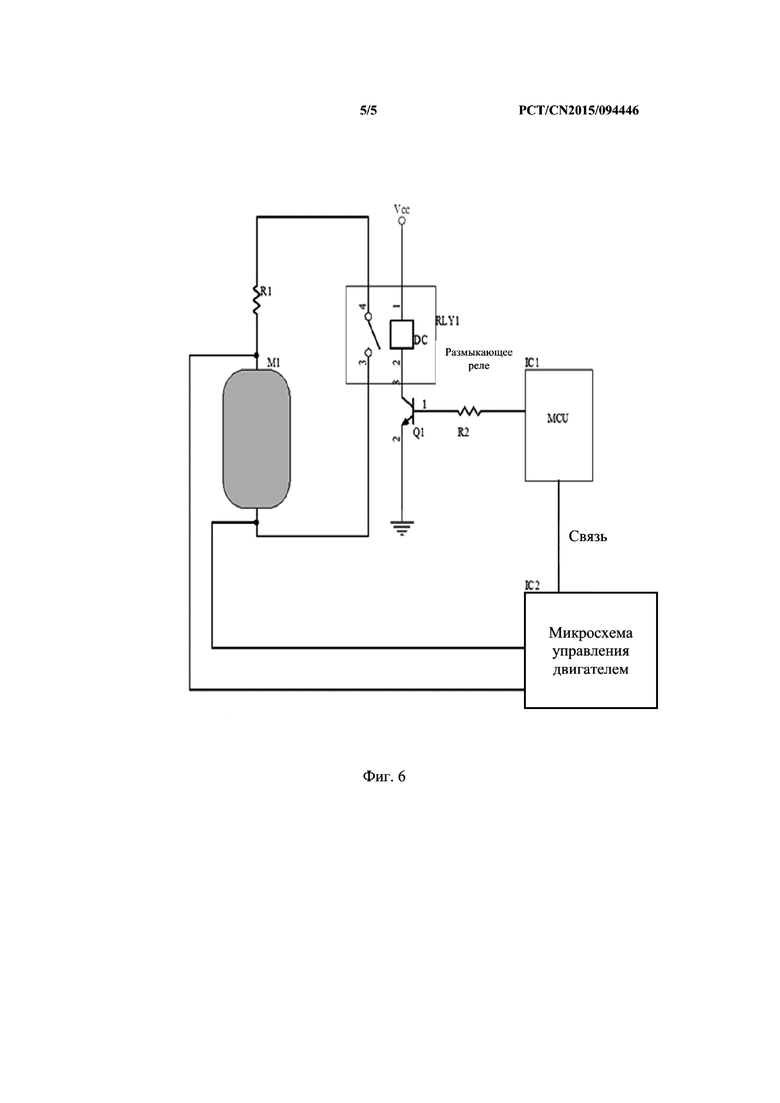
[0017] В соответствии с вышеупомянутым предпочтительным вариантом осуществления настоящего изобретения, и приводное устройство сиденья унитаза, и приводное устройство крышки сиденья содержат электродвигатель постоянного тока M1, схему управления двигателем и схему опускания при отключенном питании, при этом выходной конец схемы управления двигателем подключен к выходному концу электродвигателя постоянного тока, а управляющий конец схемы управления двигателем подключен к первому выходному концу управляющего сигнала микроконтроллера (MCU). Схема опускания при отключенном питании содержит токоограничивающий резистор, электронный переключатель и реле, при этом электронный переключатель и контрольная катушка реле подключены последовательно, один конец контрольной катушки подключен к источнику питания, а другой конец контрольной катушки подключен к заземлению. Управляющий конец электронного переключателя подключен к выходному концу второго управляющего сигнала микроконтроллера; обмотка электродвигателя постоянного тока, токоограничивающий резистор и замыкающие контакты реле соединены друг с другом, образуя последовательную схему.
[0018] Для предотвращения какого-либо загрязнения рук пользователя при прикосновении к интеллектуальному унитазу во время использования интеллектуального унитаза пользователю нет нужды прикасаться к сиденью унитаза и/или крышке сиденья, поэтому использование настоящего изобретения удобно для пользователя.
[0019] Дополнительные преимущества и характерные признаки изобретения станут очевидны из нижеследующего описания, и их можно реализовать посредством инструментальных средств и комбинаций, в частности, указанных в прилагаемой формуле изобретения.
[0020] Дальнейшие цели и преимущества станут очевидны из рассмотрения нижеследующего описания и графических материалов.
[0021] Эти и другие цели, характерные признаки и преимущества настоящего изобретения станут очевидны из нижеследующего подробного описания, сопроводительных графических материалов и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
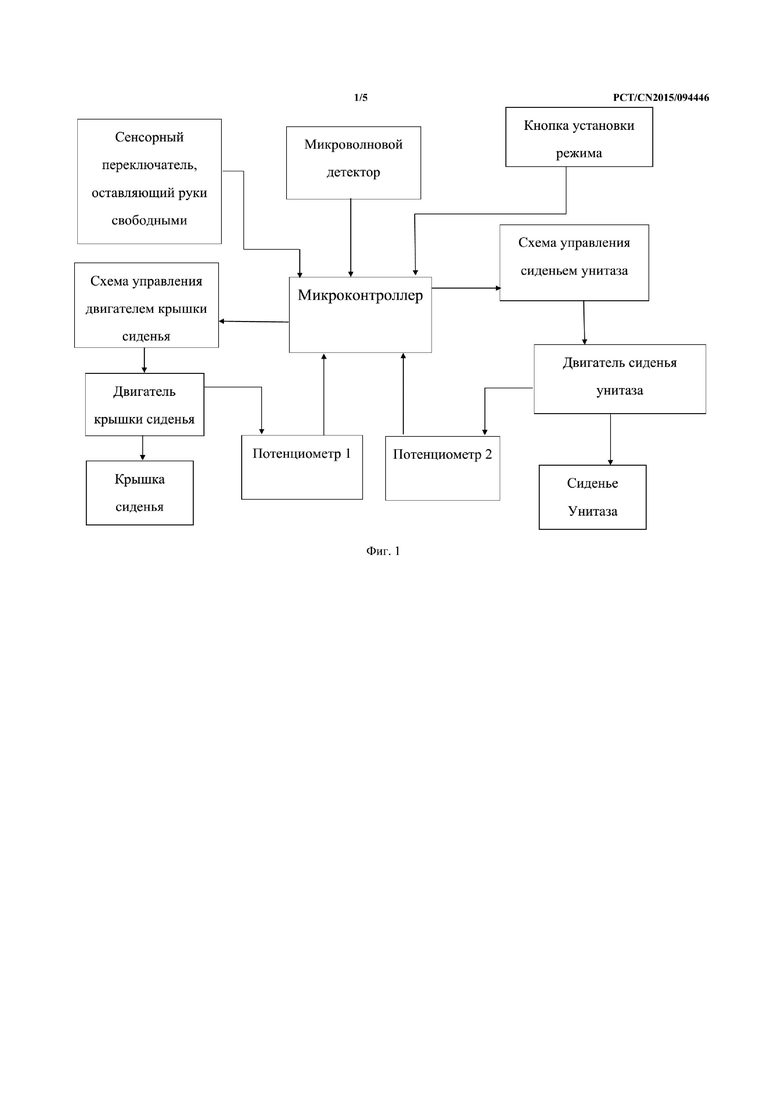
[0022] Фиг. 1 — блок-схема системы управления интеллектуальным унитазом в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
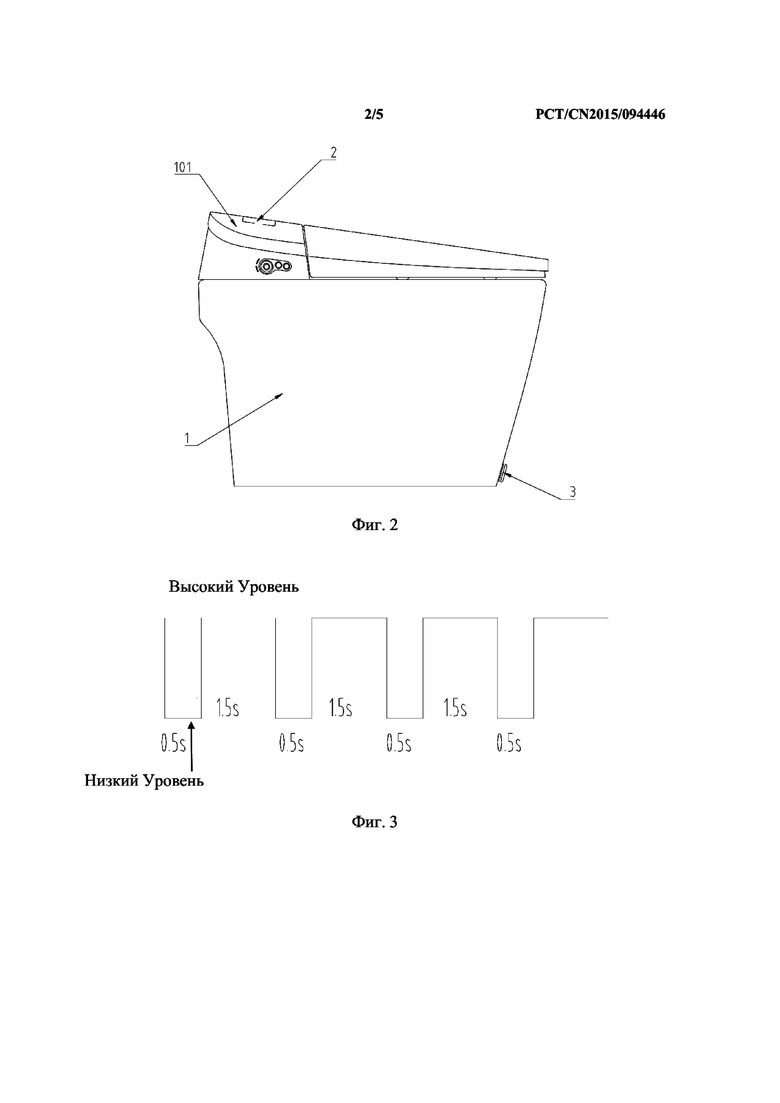
[0023] Фиг. 2 — вид в перспективе интеллектуального унитаза в соответствии с приведенным выше предпочтительным вариантом осуществления настоящего изобретения.
[0024] Фиг. 3 — формы волны для выходной волны, обнаруживаемой микроволновым детектором во время непрерывных передвижений пользователя, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
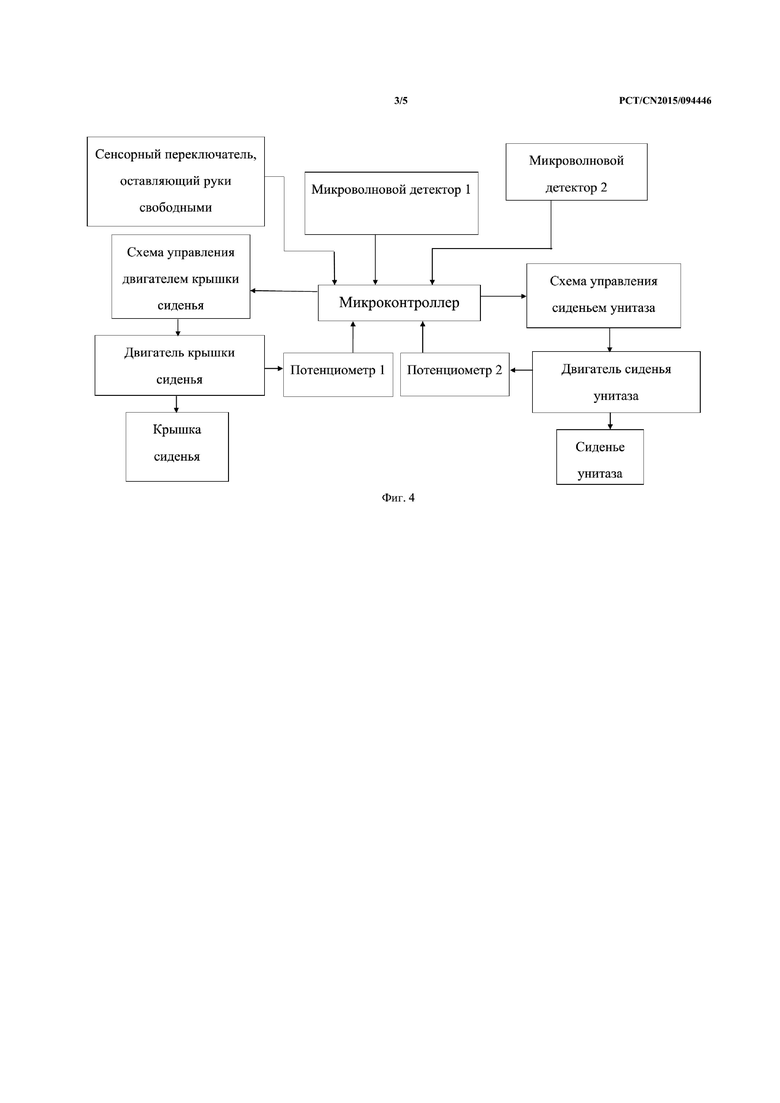
[0025] Фиг. 4 — блок-схема системы управления интеллектуальным унитазом в соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения.
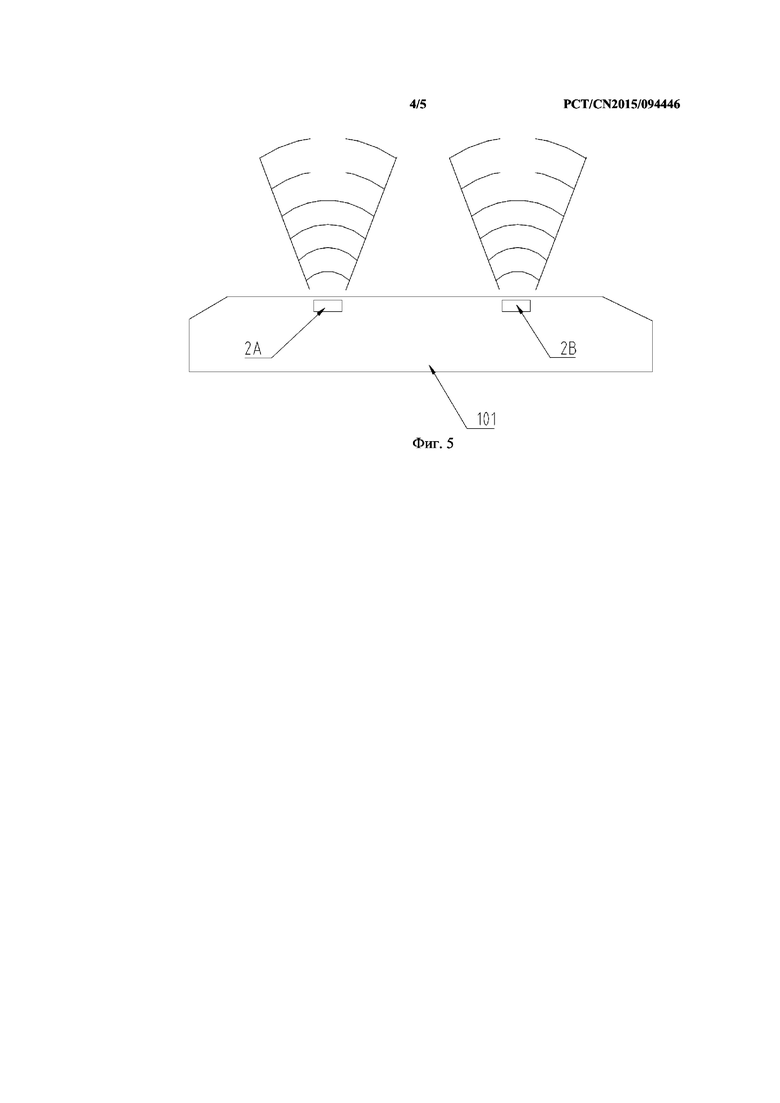
[0026] Фиг. 5 — вид в перспективе двух микроволновых детекторов системы управления в соответствии с приведенным выше вторым предпочтительным вариантом осуществления настоящего изобретения.
[0027] Фиг. 6 — принципиальная схема системы опускания при отключенном питании в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
[0028] Со ссылкой на фиг. 1—3 графических материалов изображен способ и система управления интеллектуальным унитазом в соответствии с первым предпочтительным вариантом осуществления настоящего изобретения, при этом интеллектуальный унитаз содержит сиденье унитаза и крышку сиденья, связанные на корпусе унитаза. Система управления содержит приводное устройство сиденья унитаза, приводное устройство крышки сиденья и схему управления, при этом схема управления содержит микроволновой детектор, кнопку установки режима, сенсорный переключатель, оставляющий руки свободными, и микроконтроллер.
[0029] Выходные концы микроволнового детектора, кнопки установки режима и сенсорного переключателя, оставляющего руки свободными, соответственно функционально соединены с микроконтроллером, а два выходных конца микроконтроллера соответственно функционально соединены с приводным устройством сиденья унитаза и приводным устройством крышки сиденья.
[0030] Как показано на фиг. 2, микроволновой детектор содержит приёмопередатчик, имеющий высокочастотное микроволновое излучение, такое как излучение с частотой 24,125 ГГц, и антенну-зонд, при этом микроволновой детектор функционально связан с микроконтроллером (MCU) посредством схемы интерфейса ввода-вывода. Микроконтроллер 2 расположен на центральной части верхней крышки 101 корпуса 1 унитаза, при этом микроволновой детектор действует, генерируя электромагнитную волну с частотой 24,125 ГГц для обнаружения объекта, приближающегося к интеллектуальному унитазу, такого как пользователь, перемещающийся перед интеллектуальным унитазом (обычно под углом 30 градусов), на основании частоты отраженной электромагнитной волны и характера ее изменений. Рабочий цикл обнаружения микроволнового детектора составляет около 1,5 секунд. Сенсорный переключатель 3, оставляющий руки свободными, такой как ножной приводной переключатель, предусмотрен спереди у нижнего конца корпуса 1 унитаза.
[0031] Для того чтобы повысить эффективность работы интеллектуального унитаза согласно настоящему изобретению, диапазон обнаружения микроволнового детектора 2 определяют относительно средней линии корпуса 1 унитаза, при этом сенсорный переключатель 3, оставляющий руки свободными, расположен там, где диапазон обнаружения имеет радиус обнаружения около 0,5 метров. Когда объект обнаруживается в пределах этого диапазона радиуса обнаружения, микроволновой детектор 2 в течение 0,1 секунд генерирует сигнал.
[0032] Как показано на фиг. 3, если в пределах диапазона обнаружения (имеющего радиус 0,5 метров) обнаруживается объект, из выходного конца микроволнового детектора 2 генерируется низкоуровневый сигнал с импульсом 0,5 секунд. Микроволновой детектор 2 будет повторно активироваться для обнаружения каждые 1,5 секунд.
[0033] Соответственно перемещения пользователя определяются как приближающееся перемещение пользователя, когда пользователь приближается к интеллектуальному унитазу, удаляющееся перемещение пользователя, когда пользователь удаляется от интеллектуального унитаза, и перемещение присутствия пользователя, когда пользователь находится в пределах диапазона интеллектуального унитаза. Приближающееся перемещение пользователя и перемещение присутствия пользователя определяются микроволновым детектором 2 за счет того, что выходной конец микроволнового детектора 2 постоянно генерирует низкоуровневые сигналы. Удаляющееся перемещение пользователя определяется по тому, что выходной конец микроволнового детектора 2 не генерирует ни одного низкоуровневого сигнала в течение 5 секунд.
[0034] Микроконтроллер (MCU) схемы управления интеллектуального унитаза может быть предустановлен в мужской режим работы и в женский режим работы посредством кнопки установки режима. В мужском режиме работы, когда микроволновой детектор обнаруживает пользователя-мужчину, микроволновой детектор будет генерировать низкоуровневый сигнал и отправлять его в микроконтроллер (MCU) схемы управления. Затем сиденье унитаза и крышка сиденья автоматически поворотно поднимаются посредством приводного устройства сиденья унитаза и приводного устройства крышки сиденья. После этого, если пользователь-мужчина хочет опустить сиденье унитаза в мужском режиме использования, пользователь-мужчина, наступив ногой на сенсорный переключатель, оставляющий руки свободными, может привести этот сенсорный переключатель, оставляющий руки свободными, в действие с тем, чтобы поворотно опустить сиденье унитаза приводным устройством сиденья унитаза посредством микроконтроллера. В женском режиме работы, если микроволновым детектором обнаружен пользователь-женщина, микроволновой детектор будет генерировать низкоуровневый сигнал и отправлять его в микроконтроллер (MCU) схемы управления. Затем посредством приводного устройства крышки сиденья поворотно поднимается только крышка сиденья. Иными словами, сиденье унитаза неизменно остается в его первоначальном положении.
[0035] В дополнение, когда микроволновой детектор 2 обнаруживает удаляющееся перемещение, микроконтроллер приводится в действие для закрывания сиденья унитаза и/или крышки сиденья посредством приводного устройства сиденья унитаза и приводного устройства крышки сиденья. Иными словами, в мужском режиме работы в действие для закрывания приводятся крышка сиденья и сиденье унитаза, тогда как в женском режиме работы в действие для закрывания приводится крышка сиденья.
[0036] Со ссылкой на фиг. 4 и фиг. 5 графических материалов изображен альтернативный первому варианту осуществления настоящего изобретения способ и система управления интеллектуальным унитазом в соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения. Как показано на фиг. 4, интеллектуальный унитаз содержит приводное устройство сиденья унитаза, приводное устройство крышки сиденья и схему управления, при этом схема управления содержит два микроволновых детектора 2А, 2В, кнопку установки режима, сенсорный переключатель, оставляющий руки свободными, и микроконтроллер. Два выходных конца двух микроволновых детекторов соответственно функционально соединены с микроконтроллерами. Как показано на фиг. 5, два микроволновых детектора 2А, 2В симметрично расположены соответственно справа и слева от верхней крышки 101 интеллектуального унитаза, при этом два микроволновых детектора 2А, 2В отправляют низкоуровневые сигналы в микроконтроллер на основании жеста пользователя и эти низкоуровневые сигналы, генерируемые данными двумя детекторами 2А, 2В, могут анализироваться микроконтроллером для приведения в действие приводного устройства сиденья унитаза и приводного устройства крышки сиденья.
[0037] Интеллектуальный унитаз согласно настоящему изобретению сконфигурирован для анализа жеста (т.е. движения руки пользователя слева направо или справа налево) пользователя двумя микроволновыми детекторами 2A, 2B с целью определения того, какой режим работы приводить в действие — мужской или женский. Мужской режим работы и женский режим работы определяются микроконтроллером.
[0038] Например, если микроволновыми детекторами обнаружен жест пользователя слева направо, интеллектуальный унитаз устанавливается в мужской режим работы, то есть в действие посредством MСU приводятся сиденье унитаза и крышка сиденья. Иными словами, MCU не устанавливает мужской режим работы и женский режим работы.
[0039] Если микроволновыми детекторами обнаружен жест пользователя справа налево, посредством MCU в действие приводится крышка сиденья, а сиденье унитаза остается в его первоначальном положении, и, в то же время, интеллектуальный унитаз устанавливается в женский режим работы (или в мужской режим работы).
[0040] В соответствии с настоящим изобретением, жест пользователя (слева направо или справа налево) сконфигурирован для MCU как входной сигнал 1/0, при этом посредством данного входного сигнала 1/0 сиденье унитаза и крышка сиденья могут приводиться в действие для поднятия. Когда микроволновые детекторы обнаруживают движение пользователя, для того чтобы привести в действие поднимающее перемещение сиденья унитаза и крышки сиденья, необходимо объединить низкоуровневый сигнал, генерируемый микроволновым детектором, и сигнал сенсорного переключателя, оставляющего руки свободными. Например, сенсорный переключатель, оставляющий руки свободными, может обеспечивать то, что сиденье унитаза и крышка сиденья поднимаются, когда жест пользователя, в особенности в случае пожилых людей, нельзя четко определить посредством микроволновых детекторов.
[0041] В соответствии с вышеупомянутым изобретением, сиденье унитаза и крышка сиденья могут быть подняты посредством MCU, в то время как микроволновые детекторы обнаруживают перемещение, поэтому пользователю нет нужды прикасаться к сиденью унитаза и крышке сиденья для того, чтобы их поднять. Иными словами, сиденье унитаза и крышка сиденья могут приводиться в действие для поднятия по отдельности или оставаться в их первоначальных положениях посредством жеста пользователя.
[0042] В соответствии с первым предпочтительным вариантом осуществления настоящего изобретения, интеллектуальный унитаз содержит один микроволновой детектор и один сенсорный переключатель, оставляющий руки свободными, при этом мужской режим работы и женский режим работы можно по выбору менять местами. В мужском режиме работы, когда микроволновой детектор обнаруживает перемещение пользователя-мужчины, MCU принимает низкоуровневый сигнал для поднятия сиденья унитаза и крышки сиденья. Сиденье унитаза может быть приведено в действие для опускания, когда ногой пользователя приводится в действие сенсорный переключатель, оставляющий руки свободными. В женском режиме работы MCU приводит в действие для поднятия только крышку сиденья, а сиденье унитаза остается в его первоначальном положении.
[0043] В соответствии со вторым предпочтительным вариантом осуществления настоящего изобретения, интеллектуальный унитаз содержит по меньшей мере два микроволновых детектора, при этом мужской режим работы и женский режим работы также можно по выбору менять местами. При обнаружении микроволновыми детекторами жеста пользователя слева направо интеллектуальный унитаз устанавливается в мужской режим работы (режим мочеиспускания для мужчин), а MCU приводит в действие сиденье унитаза и крышку сидения для поднятия. Если микроволновые детекторы обнаруживают жест пользователя справа налево, то интеллектуальный унитаз устанавливается в женский режим работы (или в мужской режим дефекации). Тогда посредством MCU приводится в действие для поднятия только крышка сиденья, в то время как сиденье унитаза остается в его первоначальном положении.
[0044] Система управления согласно настоящему изобретению также содержит модуль автоматического замедления для опускания сиденья унитаза и крышки сиденья при замедлении движения, при этом модуль замедления запускается посредством запуска электродвигателя постоянного тока. Электродвигатель постоянного тока содержит пять штырей, при этом первый штырь 1 и второй штырь 2 представляют собой соответственно положительный электрод и отрицательный электрод электродвигателя постоянного тока, способного управлять крутящим моментом электродвигателя постоянного тока. Третий штырь 3, четвертый штырь 4 и пятый штырь 5 подключены к потенциометру, при этом два конца сопротивления потенциометра подключены к третьему штырю 3 и четвертому штырю 4. Третий штырь 3 представляет собой штырь +5 В, а четвертый штырь представляет собой штырь GND. Пятый штырь 5 соединен с ползуном потенциометра и представляет собой штырь выборки АЦП (замера напряжения), и он приспособлен для того, чтобы представлять собой измерительный конец, соединенный с микроконтроллером, для замера разных углов сиденья унитаза и крышки сиденья.
[0045] Запуск электродвигателя постоянного тока определяется путем управления напряжением между двумя концами электродвигателя постоянного тока с целью достижения крутящего момента вперед или крутящего момента назад. Например, если первый штырь 1 представляет собой положительный штырь электродвигателя постоянного тока, а второй штырь 2 представляет собой отрицательный штырь электродвигателя постоянного тока, то электродвигатель постоянного тока можно запустить для генерирования крутящего момента вперед, при этом первый штырь 1 имеет высокий уровень напряжения, а второй штырь 2 имеет низкий уровень напряжения. В противном случае, если первый штырь 1 имеет низкий уровень напряжения, а второй штырь 2 имеет высокий уровень напряжения, то электродвигатель постоянного тока можно запустить для генерирования крутящего момента назад. Когда как первый штырь 1, так и второй штырь 2 оба имеют высокий уровень напряжений, электродвигатель постоянного тока не действует. В противном случае, когда как первый штырь 1, так и второй штырь 2 оба имеют низкий уровень напряжений, электродвигатель постоянного тока также не действует.
[0046] Существует два способа регулирования частоты вращения электродвигателя постоянного тока.
[0047] 1. Частоту вращения электродвигателя постоянного тока можно определить посредством разности напряжений между первым штырем 1 и вторым штырем 2, при этом чем больше разность напряжений между первым штырем 1 и вторым штырем 2, тем больше будет частота вращения электродвигателя постоянного тока.
[0048] 2. Частоту вращения электродвигателя постоянного тока можно определить посредством PWM (широтно-импульсной модуляции), при этом PWM модифицирует разность напряжений между первым и вторым штырями 1, 2 как прямоугольный импульс. Если коэффициент заполнения этого прямоугольного импульса является небольшим, то частота вращения электродвигателя постоянного тока является относительно невысокой.
[0049] Предпочтительно к настоящему изобретению применим второй способ регулирования частоты электродвигателя постоянного тока.
[0050] На настоящий момент управление углом сиденья унитаза и крышки сиденья относительно корпуса унитаза осуществляется от 0° до 120° (0—120° представляет собой оптимальный угол, практический угол находится между 0° и 110°).
[0051] Когда сиденье унитаза и крышка сиденья расположены под углом 0°, сиденье унитаза и крышка сиденья находятся в наложенном и связанном друг с другом состоянии. В противном случае, если угол сиденья унитаза и крышки сиденья установлен равным 120°, то сиденье унитаза и крышка сиденья подняты.
[0052] Когда сиденье унитаза и крышка сиденья подняты, угол сиденья унитаза и крышки сиденья может быть определен потенциометром, и этот угол сиденья унитаза и крышки сиденья находится между 110° и 120°. Для того чтобы опустить сиденье унитаза и крышку унитаза, от электродвигателя постоянного тока требуется вращение с коэффициентом заполнения прямоугольного импульса, равным 100%, а углы сиденья унитаза и крышки сиденья замеряются потенциометром.
[0053] 1. Когда электродвигатель постоянного тока вращается на угол между 120° и 75°, частота вращения электродвигателя постоянного тока может быть вычислена как 70 градусов/с, и способ вычисления этой частоты вращения описывается следующим образом:.
[0054] В настоящее время микросхема A/D (аналого-цифровой преобразователь) дискретизирована по 10-битному способу дискретизации, в котором 5 В разделены на 1024 сегмента. Каждый сегмент имеет соответствующее ему напряжение, и однокристальный микрокомпьютер преобразовывает это напряжение в значение A/D.
[0055] Если напряжение, соответствующее 120°, составляет 3,5 В, то значение A/D составляет 716.
[0056] Значение A/D вычисляется один раз в 0,5 секунд. Частота вращения электродвигателя постоянного тока определяется по единичному изменению значения A/D.
[0057] Например, первое замеренное значение A/D равно 120°, а второе замеренное значение A/D равно 85°, и тогда угол вращения электродвигателя постоянного тока составляет 120–85=35°. Таким образом, угловая скорость электродвигателя постоянного тока составляет 70 градусов/с.
[0058] Если фактическая частота вращения электродвигателя постоянного тока больше 70 градусов/с, то PWM посредством алгоритма PI регулирует коэффициент заполнения прямоугольного импульса до менее высокого значения. Если фактическая частота вращения электродвигателя постоянного тока меньше 70 градусов/с, то PWM посредством алгоритма PI регулирует коэффициент заполнения прямоугольного импульса до более высокого значения (значение коэффициента заполнения прямоугольного импульса не достигает 100%).
[0059] 2. Угол электродвигателя постоянного тока находится между 75° и 40°, а его угловая скорость контролируется при 35 градусах/с.
[0060] 3. Угол электродвигателя постоянного тока находится между 40° и 0°, а его угловая скорость контролируется при 25 градусах/с.
[0061] Принципы процессов поднятия и опускания сиденья унитаза и крышки сиденья являются одинаковыми, без учета установки значения угловой скорости и частоты вращения.
[0062] Когда сиденье унитаза и крышка сиденья находятся в наложенном и связанном друг с другом состоянии, то угол электродвигателя постоянного тока, определяемый потенциометром, равен 0°.
[0063] Способ управления интеллектуальным унитазом включает следующие этапы:
[0064] 1. От электродвигателя постоянного тока требуется вращение с коэффициентом заполнения прямоугольного импульса, равным 100%, и этот угол электродвигателя постоянного тока замеряется потенциометром.
[0065] 2. Угол электродвигателя постоянного тока находится между 0° и 45°, а его угловая скорость контролируется при 70 градусах/с.
[0066] 3. Угол электродвигателя постоянного тока находится между 45° и 80°, а его угловая скорость контролируется при 35 градусах/с.
[0067] 4. Угол электродвигателя постоянного тока находится между 80° и 120°, а его угловая скорость контролируется при 25 градусах/с.
[0068] На фиг. 6 показан принцип схемы опускания при отключенном питании в соответствии с третьим предпочтительным вариантом осуществления настоящего изобретения.
[0069] Автоматическое поднимающее и опускающее перемещение сиденья унитаза и крышки сиденья можно выполнить посредством автоматического приспособления замедления и схемы управления MCU. Схема опускания при отключенном питании представляет собой схему защиты для схемы управления MCU. В нормальных условиях схема опускания при отключенном питании бездействует. Схема опускания при отключенном питании действует только в ситуации отсутствия питания с целью предотвращения опускания сиденья унитаза и крышки сиденья со слишком большой скоростью.
[0070] Каждое из приводных устройств, приводное устройство сиденья унитаза и приводное устройство крышки сиденья, содержит электродвигатель постоянного тока M1, микросхему DRV8843 управления двигателем, и схему опускания при отключенном питании, при этом выходной конец микросхемы DRV8843 управления двигателем подключен к выходному концу электродвигателя постоянного тока, а управляющий конец микросхемы управления двигателем подключен к первому выходному концу управляющего сигнала микроконтроллера (MCU). Схема опускания при отключенном питании содержит токоограничивающий резистор R1, триод Q1 и реле RLY1. Коллектор триода Q1 подключен к первому концу контрольной катушки реле RLY1, а эмиттер триода Q1 подключен к заземлению. Второй конец контрольной катушки реле RLY1 подключен к источнику питания, а базовый электрод триода Q1 подключен к выходному концу второго управляющего сигнала микроконтроллера через сопротивление R2. Обычно обмотка электродвигателя постоянного тока М1, токоограничивающий резистор R1 и реле R1 подключены друг к другу в замкнутый контакт с образованием последовательной схемы.
[0071] В ситуации отключенного питания работой реле RLY1 управляет MCU посредством сопротивления R2 и триода Q1, причем при размыкании замкнутого контакта реле RLY1 электродвигатель постоянного тока M1 может приводиться в действие посредством микросхемы IC2, приводящей в действие двигатель (драйвер двигателя IC DRV8843 с двойной мостовой схемой управления от Texas Instruments).
[0072] В ситуации отсутствия питания замыкающее контакт реле RLY1 автоматически замыкается посредством внутреннего пружинного механизма. Сопротивление R1 и обмотка двигателя соединяются друг с другом, образуя схему управления с обратной связью. Когда двигатель вращается внешним усилием, в схеме управления с обратной связью генерируется ток, и этот ток потребляется внутренним сопротивлением сопротивления R1 и обмоткой двигателя. Посредством этого тока может быть запущено вращение двигателя, и, таким образом, сиденье унитаза и крышку сиденья можно медленно опустить.
[0073] Настоящее изобретение предусматривает высокочастотную микроволновую методику обнаружения, приспособленную для выполнения функции автоматического обнаружения и поднятия сиденья унитаза и крышки сиденья, и интеллектуальный унитаз может по выбору действовать в мужском или женском режиме работы посредством жеста пользователя. В то же время для поднимающего и опускающего перемещения сиденья унитаза и крышки сиденья с целью достижения нормальной скорости поднятия сиденья унитаза и крышки сиденья применяется автоматическое приспособления замедления, а в ситуации отсутствия питания сиденье унитаза и крышка сиденья не могут опускаться быстро. В дополнение, для пользователей разного возраста и роста предусмотрен сенсорный переключатель, оставляющий руки свободными.
[0074] Специалисту в данной области техники будет понятно, что вариант осуществления настоящего изобретения, показанный в графических материалах и описанный выше, является лишь примерным и не предусмотрен как ограничивающий.
[0075] Таким образом, видно, что цели настоящего изобретения были полностью и эффективно достигнуты. Варианты осуществления были показаны и описаны в целях иллюстрации функциональных и конструктивных принципов настоящего изобретения, и они допускают изменение без отступления от этих принципов. Поэтому данное изобретение включает все модификации, охватываемые в пределах духа и объема нижеследующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Крышка унитаза и заслонка крышки унитаза | 2020 |
|
RU2740070C1 |
| МЕХАНИЗАЦИЯ УЗЛА СИДЕНЬЯ УНИТАЗА ПОСРЕДСТВОМ МАГНИТНОГО ПРИСПОСОБЛЕНИЯ | 2007 |
|
RU2417730C2 |
| СЕНСОРНАЯ КОМПОНОВКА АВТОМАТИЧЕСКОГО ДОЗАТОРА | 2005 |
|
RU2468440C2 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР С СЕНСОРНОЙ КОМПОНОВКОЙ | 2005 |
|
RU2390926C2 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР | 2005 |
|
RU2388141C2 |
| ЭЛЕКТРОННОЕ РАЗДАТОЧНОЕ УСТРОЙСТВО ДЛЯ ВЫДАЧИ ЛИСТОВЫХ ИЗДЕЛИЙ | 2007 |
|
RU2441566C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2010 |
|
RU2561494C2 |
| Устройство автоматической мойки и дезинфекции сиденья унитаза | 2020 |
|
RU2725497C1 |
| ТУАЛЕТНОЕ СИДЕНЬЕ | 1994 |
|
RU2118429C1 |
| Унитаз | 2024 |
|
RU2828487C1 |
Система управления интеллектуальным унитазом содержит приводное устройство сиденья унитаза для приведения в действие указанного сиденья унитаза, приводное устройство крышки сиденья для приведения в действие указанной крышки сиденья и схему управления, содержащую детектор пользователя, предназначенный для обнаружения присутствия пользователя, и микроконтроллер для приведения в действие приводного устройства сиденья унитаза и приводного устройства крышки сиденья между мужским режимом работы и женским режимом работы. В мужском режиме работы приводное устройство сиденья унитаза и приводное устройство крышки сиденья приводятся в действие для поднятия сиденья унитаза и крышки сиденья. В женском режиме работы приводное устройство крышки сиденья приводится в действие для поднятия крышки сиденья. Эта система управления удобна в использовании и предотвращает любое загрязнение рук пользователя посредством прикосновения к интеллектуальному унитазу. 8 з.п. ф-лы, 6 ил.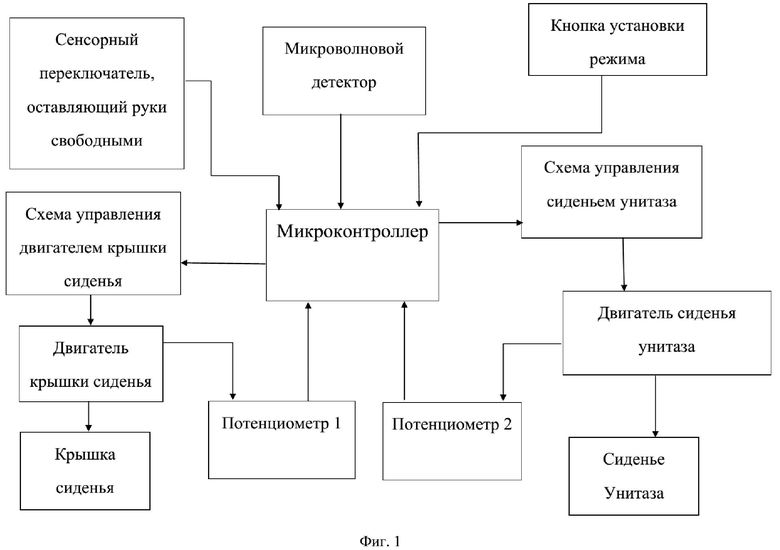
1. Система управления интеллектуальным унитазом, содержащим сиденье унитаза и крышку сиденья, при этом указанная система управления содержит приводное устройство сиденья унитаза для приведения в действие указанного сиденья унитаза, приводное устройство крышки сиденья для приведения в действие указанной крышки сиденья и схему управления, отличающаяся тем, что указанная схема управления содержит детектор пользователя, предназначенный для обнаружения присутствия пользователя, и микроконтроллер, при этом указанное приводное устройство сиденья унитаза и указанное приводное устройство крышки сиденья приводятся в действие указанной схемой управления между мужским режимом работы и женским режимом работы, при этом в указанном мужском режиме работы указанное приводное устройство сиденья унитаза и указанное приводное устройство крышки сиденья приводятся в действие указанным микроконтроллером для поднятия указанного сиденья унитаза и указанной крышки сиденья в ответ на присутствие пользователя согласно обнаружению указанным детектором пользователя, при этом в указанном женском режиме работы указанное приводное устройство крышки сиденья приводится в действие для поднятия указанной крышки сиденья в ответ на присутствие пользователя согласно обнаружению указанным детектором пользователя.
2. Система управления по п. 1, отличающаяся тем, что, когда указанный детектор пользователя не обнаруживает движения или обнаруживает отсутствие пользователя, указанное приводное устройство сиденья унитаза и указанное приводное устройство крышки сиденья приводятся указанным микроконтроллером в действие для наложения и связывания друг с другом указанного сиденья унитаза и указанной крышки сиденья.
3. Система управления по п. 1, отличающаяся тем, что указанный детектор пользователя представляет собой микроволновой детектор, а указанное сиденье унитаза и указанная крышка сиденья поднимаются посредством указанного микроконтроллера, при этом указанная схема управления содержит сенсорный переключатель, оставляющий руки свободными, при этом выходной конец указанного сенсорного переключателя, оставляющего руки свободными, подключен к указанному микроконтроллеру, при этом в указанном мужском режиме работы, когда указанный сенсорный переключатель, оставляющий руки свободными, запускается ногой пользователя, указанное приводное устройство сиденья унитаза приводится микроконтроллером в действие для опускания указанного сиденья унитаза.
4. Система управления по п. 1, отличающаяся тем, что указанный детектор пользователя содержит два микроволновых детектора, при этом оба конца указанных двух микроволновых детекторов соответственно подключены к указанным микроконтроллерам, при этом указанные два микроволновых детектора симметрично расположены соответственно справа и слева от верхней крышки указанного интеллектуального унитаза для обнаружения и анализа жеста пользователя с целью последовательной отправки выходных сигналов от микроволновых детекторов с целью определения того, какой режим работы, мужской или женский, установлен и приводится в действие указанным микроконтроллером.
5. Система управления по п. 1, отличающаяся тем, что указанная схема управления содержит сенсорный переключатель, оставляющий руки свободными, при этом выходные концы указанного сенсорного переключателя подключены к указанному микроконтроллеру, при этом в отсутствие обнаружения жеста пользователя указанным микроконтроллером указанный сенсорный переключатель, оставляющий руки свободными, запускается ногой пользователя так, что указанное приводное устройство крышки сиденья и указанное приводное устройство сиденья унитаза приводятся указанным микроконтроллером в действие для поднятия указанного сиденья унитаза и указанной крышки сиденья.
6. Система управления по п. 1, отличающаяся тем, что каждое из указанного приводного устройства сиденья унитаза и указанного приводного устройства крышки сиденья содержит электродвигатель постоянного тока, схему управления двигателем и потенциометр, при этом подвижные контакты указанного потенциометра приводятся в движение указанным электродвигателем постоянного тока, при этом два закрепленных конца сопротивления указанного потенциометра соответственно подключены к положительному электроду источника питания и к заземлению, при этом указанные подвижные контакты указанного потенциометра служат в качестве измерительных концов, подключенных к указанному микроконтроллеру с целью определения угла для каждого из указанного сиденья унитаза и указанной крышки сиденья, при этом частота вращения указанного электродвигателя постоянного тока определяется посредством PMW, и, когда указанное сиденье унитаза и указанная крышка сиденья поднимаются или опускаются, указанные углы указанного сиденья унитаза и указанной крышки сиденья часто замеряются указанным микроконтроллером посредством указанного потенциометра так, что вычисляется угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья, и, если указанная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья превышает предопределенные значения, коэффициенты заполнения указанного электродвигателя постоянного тока контролируются с целью их уменьшения.
7. Система управления по п. 6, отличающаяся тем, что процесс опускания указанного сиденья унитаза и указанной крышки сиденья разделен на множество угловых сегментов, при этом первоначальная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья имеет наивысшее значение, когда указанное сиденье унитаза и указанная крышка сиденья начинают опускаться, при этом конечная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья имеет самое низкое значение, когда указанный процесс опускания каждого из указанного сиденья унитаза и указанной крышки сиденья завершен, при этом процесс поднятия каждого из указанного сиденья унитаза и указанной крышки сиденья разделен на множество угловых сегментов, при этом первоначальная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья имеет наивысшее значение, когда указанное сиденье унитаза и указанная крышка сиденья начинают подниматься, при этом конечная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья имеет самое низкое значение, когда указанный процесс поднятия каждого из указанного сиденья унитаза и указанной крышки сиденья завершен.
8. Система управления по п. 6, отличающаяся тем, что каждое из указанного сиденья унитаза и указанной крышки сиденья расположено под углом 0°, когда указанное сиденье унитаза и указанная крышка сиденья находятся в наложенном и связанном друг с другом состоянии, а угол для каждого из указанного сиденья унитаза и указанной крышки сиденья установлен равным 120°, когда указанное сиденье унитаза и указанная крышка сиденья подняты, при этом в процессе опускания каждого из указанного сиденья унитаза и указанной крышки сиденья угол для каждого из указанного сиденья унитаза и указанной крышки сиденья установлен между 120° и 75°, когда указанная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья установлена равной 70°/с, при этом в процессе опускания угол указанного сиденья унитаза и указанной крышки сиденья установлен между 75° и 40°, когда указанная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья установлена при 35°/с, при этом в процессе опускания угол для каждого из указанного сиденья унитаза и указанной крышки сиденья установлен между 40° и 0°, когда указанная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья установлена равной 25°/с, при этом в процессе поднятия угол для каждого из указанного сиденья унитаза и указанной крышки сиденья установлен между 0° и 40°, когда указанная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья установлена равной 70°/с, при этом в процессе поднятия угол для каждого из указанного сиденья унитаза и указанной крышки сиденья установлен между 40° и 80°, когда указанная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья установлена при 35°/с, при этом в процессе поднятия угол для каждого из указанного сиденья унитаза и указанной крышки сиденья установлен между 80° и 120°, когда указанная угловая скорость для каждого из указанного сиденья унитаза и указанной крышки сиденья установлена при 25°/с.
9. Система управления по п. 1, отличающаяся тем, что каждое из приводных устройств, указанное приводное устройство сиденья унитаза и указанное приводное устройство крышки сиденья, содержит электродвигатель постоянного тока, схему управления двигателем и схему опускания при отключенном питании, при этом выходной конец указанной схемы управления двигателем подключен к выходному концу указанного электродвигателя постоянного тока, а управляющий конец указанной схемы управления двигателем подключен к первому выходному концу управляющего сигнала указанного микроконтроллера (MCU), при этом указанная схема опускания при отключенном питании содержит токоограничивающий резистор, электронный переключатель и реле, при этом указанный электронный переключатель и контрольная катушка указанного реле подключены последовательно и один конец указанной контрольной катушки подключен к источнику питания, а другой конец указанной контрольной катушки подключен к заземлению, а управляющий конец указанного электронного переключателя подключен к выходному концу второго управляющего сигнала указанного микроконтроллера, при этом обмотка указанного электродвигателя постоянного тока, указанный токоограничивающий резистор и размыкающие контакты указанного реле соединены друг с другом, образуя последовательную схему.
| US 7380292 B1, 03.06.2008 | |||
| US 5307524 A, 03.05.1994 | |||
| СПОСОБ ИЗВЛЕЧЕНИЯ ГАЗА ИЗ УГЛЕНОСНОЙ ТОЛЩИ | 2008 |
|
RU2376475C1 |
| WO 2012121582 A2, 13.09.2012 | |||
| KR 20130040062 A, 23.04.2013. | |||

