Область техники, к которой относится изобретение
Настоящее изобретение относится к автомобильным транспортным средствам, в частности к способу улучшения работы старт-стопной системы двигателя транспортного средства.
Уровень техники
На транспортных средствах, старт-стопной системой и механической коробкой передач для определения отпускания водителем педали сцепления используют пороговые значения, связанные с положением педали сцепления. Переход педали от нажатого состояния к отпущенному применяется в старт-стопной системе для остановки двигателя. Кроме того, перемещение водителем педали сцепления из отпущенного положения через пороговое положение в нажатое положение применяется в старт-стопной системе в качестве пускового сигнала для повторного запуска двигателя.
Раннее такие пороговые значения были фиксированными, установлены таким образом, чтобы это было удобно для водителей, которые привычно оставляют ногу на педали сцепления (Патентная заявка Великобритании №1206179.2, поданная 5 апреля 2011 г. теми же заявителями, подробно описывает данные систему и способ). Способ, предлагаемый в патентной заявке Великобритании №1206179.2, имеет преимущество, заключающееся в увеличении возможностей выключения двигателя на любых транспортных средствах, оборудованных соответствующим образом, и, следовательно, в уменьшении общего потребления топлива. Анализ данных, полученных от реальных пользователей, показывает, что до 35% пользователей оставляют свою ногу на педали сцепления.
Однако существует еще одна группа водителей, оставляющих ногу на педали сцепления, которые пользуются преимуществами данной системы по причине особенной манеры вождения. Такие водители оставляют свою ногу на педали сцепления (иногда говорят «едут на сцеплении»), производя 15% хода педали, но во время остановки транспортного средства водители быстро отпускают педаль сцепления, а затем снова устанавливают ногу на педаль сцепления, чтобы снова держать ногу на педали и нажать на нее, задействовав 15% ее хода. Подобное «изменение положения ноги» часто происходит, когда водитель перемещает каблук в более удобное положение.
Следствием того, что пороговое значение (Th1) для определения положения сцепления между Отпущено/Нажато может меняться в пределах постоянного диапазона, например от 10 до 30%, для обеспечения удобной «установки ноги» (в соответствии с патентной заявкой Великобритании №1206179.2) является то, что водитель, который регулирует положение своей ноги способом, описанным выше, может упустить возможность остановки двигателя, как это описано далее.
Когда водитель полностью отпускает педаль сцепления во время изменения положения ноги, что, как правило, происходит во время остановки транспортного средства, пороговое положение Th1 отпущенного/нажатого сцепления «последует» за ногой водителя весь путь до наиболее отпущенного предельного положения своего диапазона (например, 10%). В этой точке состояние педали сцепления обозначено как Отпущено. Затем, если водитель снова устанавливает ногу на педаль сцепления (снова на 15% хода педали), то положение педали сцепления проходит пороговое положение Отпущено/Нажато, на значении 10%, и, таким образом, состояние педали сцепления меняется с Отпущено на Нажато.
Если во время остановки транспортного средства водитель снова устанавливает ногу на педаль сцепления таким способом до того, как старт-стопная система двигателя отключила двигатель, то старт-стопная система двигателя не выключит двигатель, поскольку педаль сцепления находится в нажатом состоянии, а для старт-стопной системы необходимо, чтобы педаль сцепления была отпущена до подачи команды об остановке двигателя. В данном случае водитель не намеревался предотвратить остановку двигателя и, как следствие, топливо в двигателе будет использовано без необходимости.
В другом варианте, если водитель снова устанавливает ногу на педаль сцепления, нажимая ее более, чем на 10%, после того, как старт-стопная система отключила двигатель, то произойдет изменение состояния педали с отпущенного - на нажатое, что приведет к тому, что старт-стопная система повторно запустит двигатель. Такая ситуация нежелательна, поскольку водитель не намеревался повторно запускать двигатель, и топливо в двигателе будет использовано без необходимости.
С целью уменьшения случаев упущенных возможностей остановки двигателя можно уменьшить диапазон пороговых значений с 10-30% до 20-30% с тем, чтобы минимальный предел диапазона (20%) превышал обычное положение педали с установленной на нее ногой (15%). Тем не менее, в то время как данный способ представляет собой преимущество для водителей, которые обычно устанавливают ногу на педаль сцепления, и водителей, которые изменяют положение ноги на педали сцепления, те водители, которые полностью отпускают педаль сцепления (0%) вынуждены нажимать педаль дальше (например, до предела 20%) для того, чтобы достигнуть состояния «Нажато» и инициировать запуск двигателя. Им кажется, что запуск происходит менее «охотно», что приводит к увеличению времени, необходимого для запуска.
Раскрытие изобретения
Целью изобретения является разработка способа управления старт-стопным процессом двигателя транспортного средства, который минимизирует вышеописанные проблемы.
Согласно первому аспекту изобретения предложен способ управления работой старт-стопной системы двигателя транспортного средства, в котором изменение рабочего режима двигателя происходит при прохождении порогового значения положения педали сцепления, при этом способ включает в себя определение верхнего и нижнего пределов порогового значения положения педали сцепления и уменьшение нижнего предела с первого значения положения педали сцепления при работающем двигателе до второго значения, менее нажатого, положения педали сцепления при остановленном двигателе.
Первое значение может соответствовать положению педали сцепления, которое является более нажатым, чем ожидаемое положение педали сцепления по причине того, что водитель транспортного средства едет на сцеплении.
Первое значение нажатого положения может находиться в диапазоне от 18 до 25% хода педали.
Второе значение может соответствовать положению педали сцепления, которое является менее нажатым, чем ожидаемое положение педали сцепления по причине того, что водитель транспортного средства едет на сцеплении.
Второе значение нажатой педали может находиться в диапазоне от 6 до 12% хода педали.
Способ также может предусматривать изменение нижнего предела со второго значения нажатой педали до первого значения нажатой педали при изменении режима двигателя с остановленного до рабочего режима, не вызывая перехода двигателя из рабочего режима снова к остановленному.
Нижний предел может быть изменен таким образом, чтобы быть равным минимуму первого нажатого значения и максимальному предыдущему нижнему пределу нажатого значения или текущему пороговому значению положения педали сцепления.
Способ может также включать в себя определение рабочего режима двигателя и выбор первого или второго значения нажатой педали на основании определения рабочего режима двигателя.
Способ может также включать в себя увеличение нижнего предела с определенным шагом со второго, менее нажатого положения педали сцепления, до первого значения положения педали сцепления, если было определено, что режим двигателя изменился с остановленного до рабочего режима.
Пошаговое увеличение нижнего предела может включать в себя применение алгоритма Rl(t)=MIN(LlR, Max(Rl(t-1), Th1)) для увеличения нижнего предела с определенным шагом, где Rl(t) - переходный нижний предел, который необходимо установить, Rl(t-1) - последнее значение установленного переходного нижнего предела, Th1 - текущее значение изменяемого порогового значения, а LlR - заранее заданное значение, выбранное в качестве значения для нижнего предела при работающем двигателе.
Согласно второму аспекту изобретения предложена старт-стопная система двигателя для транспортного средства, включающая в себя электронный блок управления и датчик положения педали сцепления для определения положения педали сцепления, причем электронный блок управления может изменять рабочий режим двигателя, реагируя на изменение измеренного положения педали сцепления таким образом, чтобы пройти через пороговое значение педали сцепления, определенное электронным блоком управления. При этом электронный блок управления также может задавать верхний и нижний пределы для порогового значения положения педали сцепления, уменьшать нижний предел с первого значения нажатого положения во время работы двигателя до второго, менее нажатого положения при остановленном двигателе.
Первое значение нажатого положения может соответствовать положению педали сцепления, которое является более нажатым, чем ожидаемое положение педали сцепления, по причине того, что водитель транспортного средства оставляет ногу на сцеплении.
Второе значение нажатого положения может соответствовать положению педали сцепления, которое является менее нажатым, чем ожидаемое положение педали сцепления, по причине того, что водитель транспортного средства оставляет ногу на сцеплении.
Электронный блок управления может также изменять нижний предел со второго значения нажатого положения до первого значения нажатого положения при изменении режима двигателя с остановленного до рабочего режима, не вызывая перехода двигателя из рабочего режима снова к остановленному состоянию.
Нижний предел может быть изменен таким образом, чтобы быть равным минимуму первого значения нажатого положения и максимуму значения предыдущего нижнего предела нажатого положения и текущему пороговому значению положения педали сцепления.
Согласно третьему аспекту изобретения, предложено автомобильное транспортное средство, имеющее двигатель, педаль сцепления для управления включением сцепления и старт-стопную систему двигателя, выполненную в соответствии с вышеприведенным вторым аспектом изобретения.
Краткое описание чертежей
Изобретение далее описано на примере со ссылкой на сопроводительные чертежи, на которых:
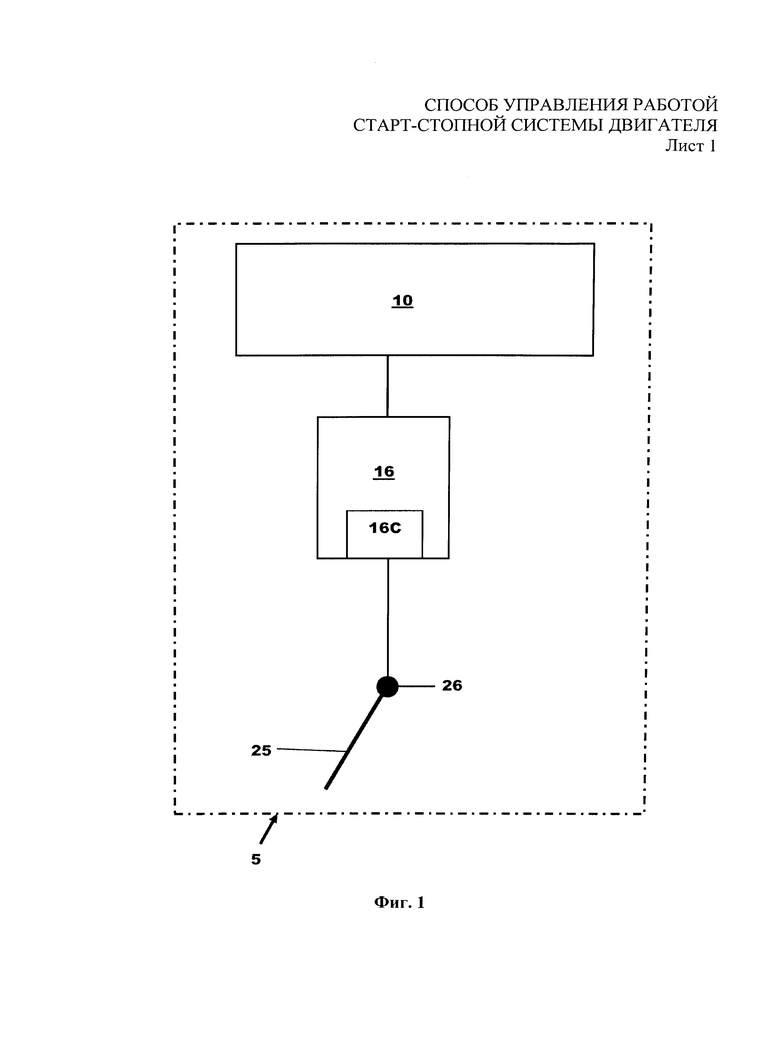
Фиг.1 представляет собой схему автомобильного транспортного средства в соответствии с третьим аспектом изобретения, имеющего старт-стопную систему в соответствии со вторым аспектом изобретения;
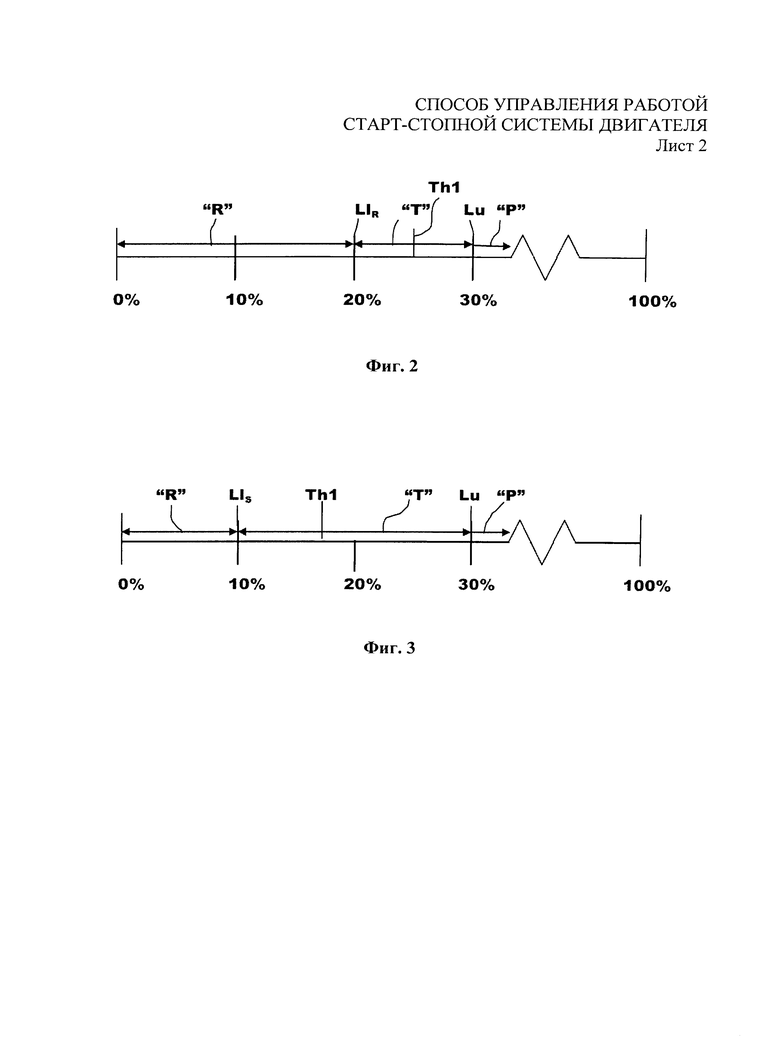
Фиг.2 представляет собой схему, на которой показан рабочий диапазон перемещения педали сцепления с тремя определенными зонами во время работы двигателя;
Фиг.3 представляет собой схему, аналогичную Фиг.2, на которой показаны три определенные зоны при неработающем двигателе;
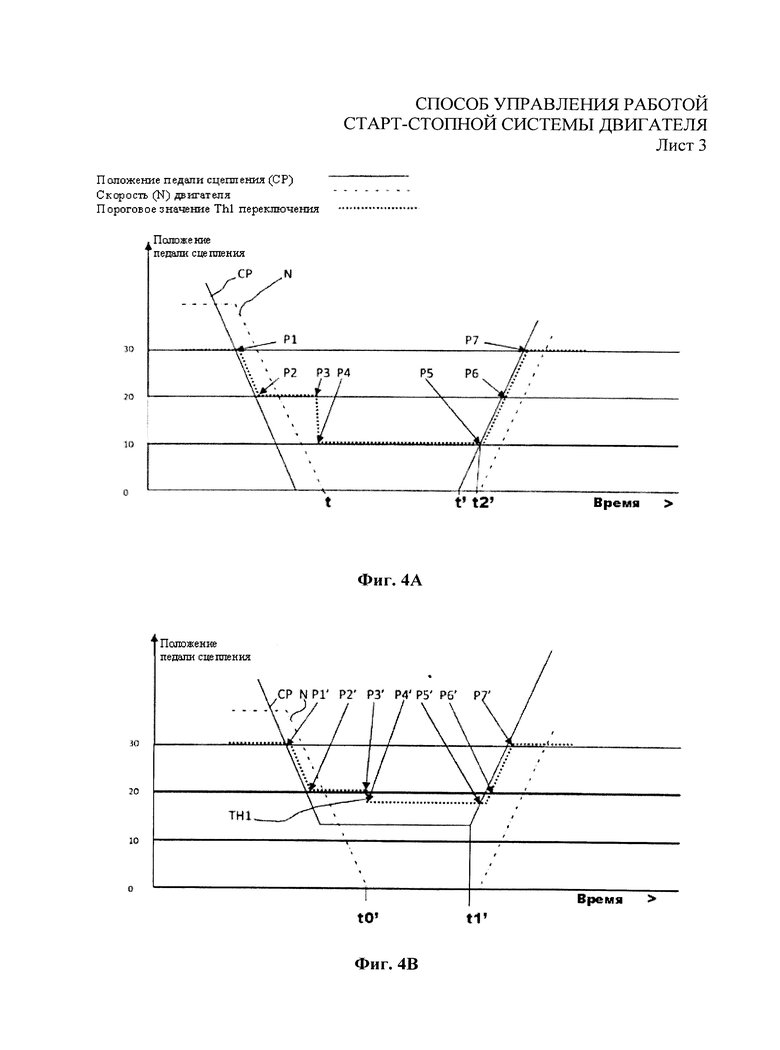
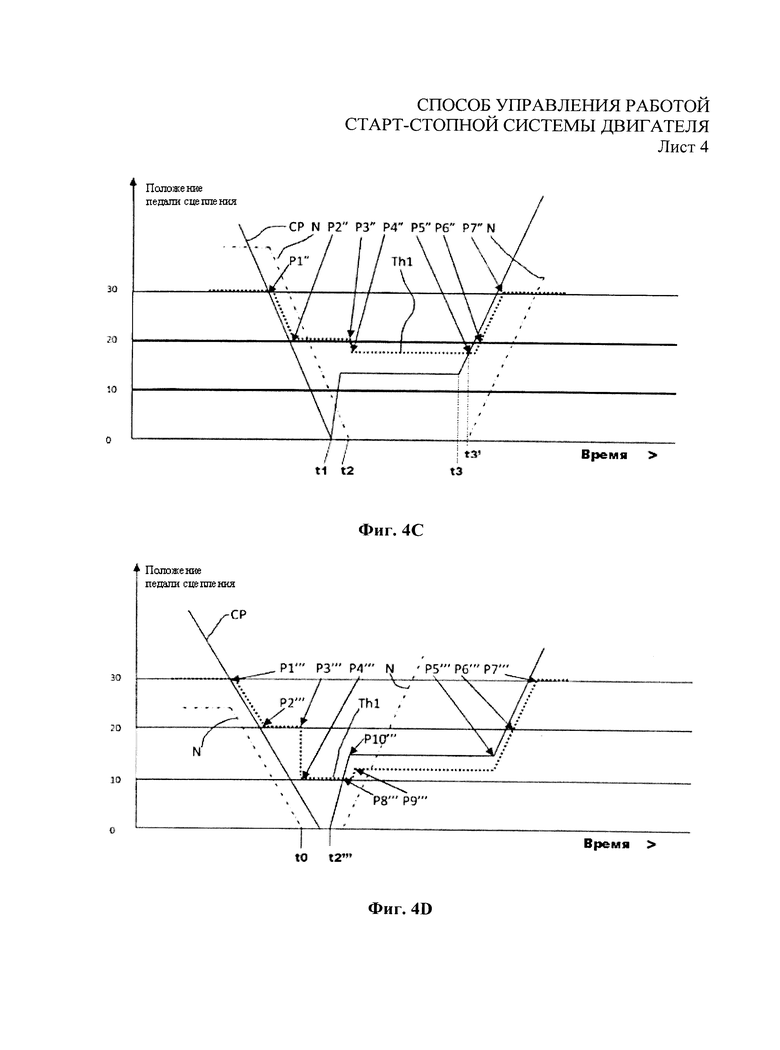
Фиг.4A-4D представляют собой графики зависимости положения сцепления от времени, на которых показаны четыре варианта старт-стопных сценариев;
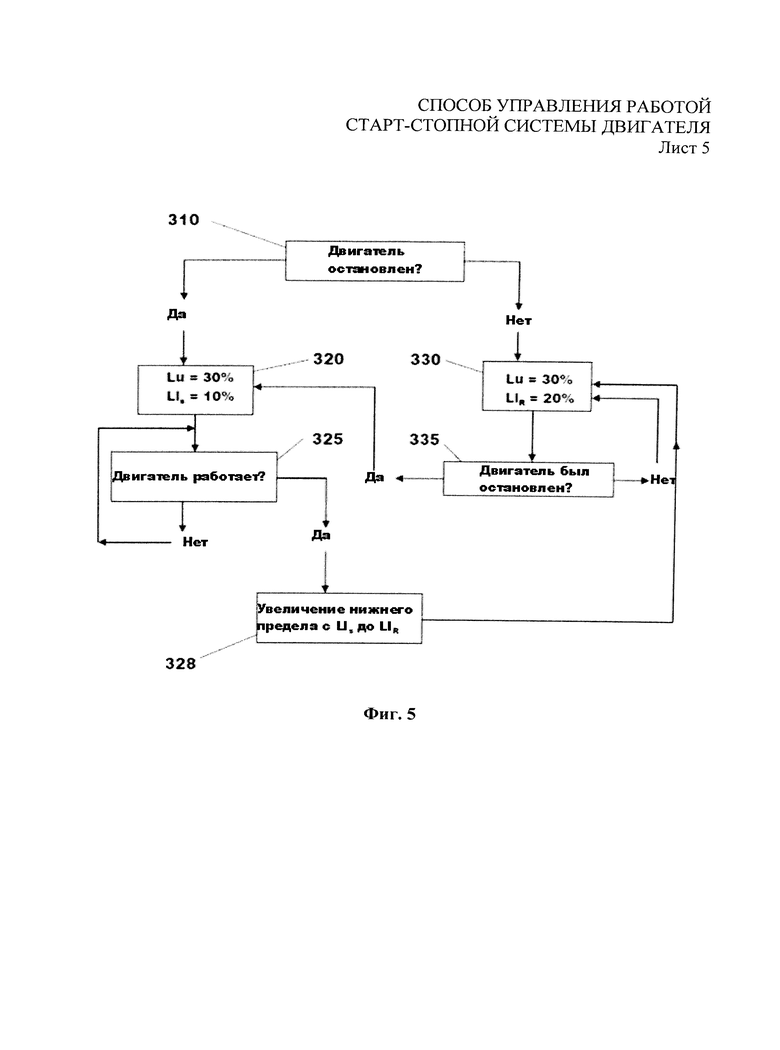
Фиг.5 представляет собой высокоуровневую блок-схему выполнения способа регулировки пороговых значений, составляющих часть способа управления старт-стопных операций двигателя автомобильного транспортного средства в соответствии с первым аспектом изобретения.
Осуществление изобретения
На Фиг.1 показано автомобильное транспортное средство 5, содержащее двигатель 10 и старт-стопную систему, которая имеет электронный блок 16 управления, включающий в себя электронный процессор 16C для управления положением педали сцепления (ЕС3Р) и датчик 26 положения педали сцепления, установленный для считывания положения педали 25 сцепления. Следует понимать, что датчик 26 положения педали сцепления может измерять положение педали 25 сцепления любым подходящим способом и необязательно должен быть напрямую соединен с педалью 25 сцепления, как показано на Фиг.1. Он может, например, в качестве варианта следить за положением поршня главного цилиндра сцепления. Для описываемого примера осуществления изобретения выходной сигнал от датчика 26 положения педали сцепления может быть преобразован в процентное выражение положения педали сцепления, где 0% нажатое положение означают полностью отпущенную педаль 25 сцепления, а 100% нажатое положение означают полностью нажатую педаль 25 сцепления. Однако следует понимать, что в других случаях те же описываемые методы могут быть применены для других представлений положения педали сцепления, например, уровня или амплитуды выходного сигнала датчика положения педали сцепления.
Следует также понимать, что ЕС3Р 16C может представлять собой отдельный блок, и необязательно должен быть организован как часть электронного блока 16 управления. Кроме того, ЕС3Р 16C может, как изложено в данном описании, выполнять все этапы, необходимые для оценки положения педали сцепления и направлять на электронный блок 16 управления выходной сигнал, указывающий на то, должен ли двигатель 10 быть остановлен или запущен, либо только преобразовывать сигнал от датчика 26 положения педали сцепления в отфильтрованный стандартный сигнал для использования электронным блоком 16 управления с целью выполнения всех этапов, необходимых для оценки положения педали сцепления, и определения того, должен ли двигатель 10 быть остановлен или запущен.
Во многих отношениях электронный блок 16 управления и ЕС3Р 16C построены и функционируют аналогично соответствующим элементам, описанным в патентной заявке Великобритании №1206179.2, и, таким образом, здесь не приводится их подробное описание.
Основным отличием настоящего изобретения от изобретения, раскрытого в патентной заявке Великобритании №1206179.2, является то, что граница между зоной перехода «T» и зоной отпущенного положения «R» задается в данном случае на основании того, работает двигатель 10 в данный момент или нет, в то время как в патентной заявке Великобритании №1206179.2 указанная граница является фиксированной.
На Фиг.2 и 3 схематично представлен диапазон перемещений педали 25 сцепления и, в частности, три заранее заданных зоны, применяемых для управления запуском и остановкой двигателя 10.
На Фиг.2 схематично показано, как ЕС3Р 16C обрабатывает выходной сигнал от датчика 26 положения педали сцепления в рабочих зонах на основании процентного выражения от полностью нажатого положения для случая, когда двигатель 10 не остановлен, то есть двигатель 10 работает.
В зоне «R» управляющий выходной сигнал от ЕС3Р 16C указывает на то, что педаль 25 сцепления «отпущена», то есть сцепление, используемое путем перемещения педали 25 сцепления, будет во включенном состоянии.
В зоне «P», в которой расположена точка схватывания сцепления, управляющий выходной сигнал от ЕС3Р 16C указывает на то, что педаль 25 сцепления «нажата».
В переходной зоне «T» управляющий выходной сигнал от ЕС3Р 16C будет зависеть от местонахождения и перемещения педали 25 сцепления.
В показанном случае при работающем двигателе 10 зона «R» отпущенного положения задана нижним пределом в 0% и верхним заранее определенным фиксированным пределом LlR, который в данном случае равен 20%.
Переходная зона «T» ограничена заранее заданным нижним пределом LlR и заранее заданным верхним постоянным пределом Lu, который в данном случае равен 30%. Заранее заданный верхний постоянный предел Lu выбран таким образом, что он имеет значение положения, не превышающее ожидаемую точку схватывания сцепления, управляемого с помощью педали 25 сцепления, но превышающее значение положения, вызванное смещением педали 25 сцепления в результате удержания водителем педали 25 сцепления.
Зона «P» нажатого положения ограничена заранее заданным верхним пределом Lu и максимальным нажатым положением (100%).
Дополнительное, изменяемое следящее пороговое значение Th1 функционирует в пределах переходной зоны «T» и расположено между нижним пределом LlR и верхним пределом Lu. Таким образом, Lu≥Th1≥LlR.
На Фиг.3 схематично показано, как ЕС3Р 16C обрабатывает выходной сигнал от датчика 26 положения педали сцепления в рабочих зонах на основании процентного выражения полностью отжатого положения для случая, когда двигатель 10 остановлен, то есть двигатель 10 не работает.
Как и на предыдущей фигуре, показаны три зоны «R», «P» и «T», которые имеют те же характеристики, как было описано выше.
Тем не менее, в данном случае при остановленном двигателе 10 зона «R» отпущенного положения ограничена нижним пределом в 0% и заранее заданным верхним пределом LlS, который в данном случае равен 10%.
Переходная зона «T» ограничена заранее заданным нижним пределом LlS и заранее заданным верхним пределом Lu, который в данном случае равен 30%. Заранее заданный верхний постоянный предел Lu, как и на предыдущей фигуре, выбран таким образом, что он имеет значение положения, не превышающее ожидаемую точку схватывания сцепления, управляемого с помощью педали 25 сцепления, но превышающее значение положения, вызванное смещением педали 25 сцепления в результате удерживания водителем педали 25 сцепления.
Зона «P» нажатого положения ограничена заранее заданным верхним пределом Lu и максимальным нажатым положением (100%).
Изменяемое следящее пороговое значение Th1 функционирует в пределах зоны «T» перехода и расположено между нижним пределом LlS и верхним пределом Lu. Таким образом, Lu≥Th1≥LlS.
Работа в переходной зоне происходит так, как это описано в патентной заявке Великобритании №1206179.2, с учетом изменяемого порогового значения Th1, следующего за положением педали сцепления (CP) таким образом, чтобы всегда проходить ближе тому краю так называемого переходного промежутка положения педали сцепления, который противоположен направлению движения педали 25 сцепления. Следовательно, если педаль 25 сцепления перемещается по направлению к полностью отпущенному положению 0%, то изменяемое пороговое значение Th1 будет лежать вблизи стороны нажатого положения текущего положения педали сцепления.
Аналогичным образом, если педаль 25 сцепления перемещается по направлению к полностью нажатому положению (100%), то изменяемое пороговое значение Th1 будет лежать вблизи стороны отпущенного положения текущего положения педали сцепления.
В патентной заявке Великобритании №1206179.2 Фиг.6 и ее описание раскрывает данный процесс отслеживания более подробно.
На Фиг.4A-4D показаны четыре примерных сценария изменения положения педали сцепления в зависимости от времени. Во всех показанных сценариях педаль 25 сцепления была предварительно полностью нажата (100%), чтобы позволить коробке передач (не показана) транспортного средства 5 перейти в нейтральное положение, было вызвано торможение транспортного средства 5 до остановки, и педаль 25 сцепления теперь отпущена водителем из положения педали сцепления, превышающего верхний предел Lu.
В примере, проиллюстрированном на Фиг.4A, водитель оперирует педалью сцепления так, чтобы полностью ее отпустить (0%), а затем, по истечении небольшого периода времени, нажимает на педаль сцепления снова, чтобы переместить ее по направлению к полностью нажатому положению (100%).
Поскольку история положения педали сцепления такова, что педаль сцепления была нажата дальше, чем верхний предел Lu (30%), то изменяемое пороговое значение Th1 переключения будет подтянуто к верхнему пределу Lu и, таким образом, будет находиться на значении 30%.
Следовательно, когда водитель перемещает педаль сцепления в чуть менее нажатое положение, чем 30% хода педали, как обозначено точкой Р1, пороговое значение Th1 будет пересечено, и будет начат процесс остановки двигателя 10, поскольку пересечение изменяемого порогового значения от нажатого положения к отпущенному представляет собой сигнал, запускающий остановку двигателя. В то время как педаль 25 сцепления продолжает дальнейшее перемещение в направлении к отпущенному положению, проходя через переходную зону «T», изменяемое пороговое значение Th1 следует за текущим положением педали сцепления с тем, чтобы быть установленным на стороне нажатого положения текущего положения сцепления, в данном случае около 3%.
Однако, когда изменяемое пороговое значение Th1 достигает нижнего предела LlR, обозначенного точкой P2, изменяемое пороговое значение Th1 может более не следовать за положением педали сцепления, поскольку оно ограничено значением, заданным для нижнего предела LlR, составляющим в данном случае 20%. Следовательно, изменяемое пороговое значение Th1 может быть оставлено постоянным на уровне 20%, как обозначено горизонтальной пунктирной линией, проходящей между точками P2 и P3.
В момент времени «t», соответствующий точке Р3, количество оборотов (N) двигателя достигло нуля, то есть двигатель 10 был остановлен, за счет чего нижний предел изменен с предела при работающем двигателе LlR на предел при неработающем двигателе LlS. Нижний предел при неработающем двигателе в данном случае установлен на 10% и, таким образом, сразу после остановки двигателя 10 в момент времени t, изменяемое пороговое значение Th1 будет быстро перемещено на новое значение 10%, как обозначено переходом из точки Р3 в точку Р4.
На фигуре показана временная задержка длительностью в несколько секунд, во время которой педаль 25 сцепления полностью отпущена, двигатель 10 остановлен, и изменяемое пороговое значение Th1 остается равным 10%, после чего в момент времени t' водитель начинает нажимать на педаль 25 сцепления, чтобы переместить ее в полностью нажатое положение. Немедленного пуска двигателя 10 не происходит, поскольку изменяемое пороговое значение Th1 установлено на 10%, а положение педали сцепления изначально является менее нажатым, чем этот предел, однако сразу после пересечения изменяемого порогового значения Th1 в направлении от отпущенного положения к нажатому, что в данном случае происходит в точке P5 в момент времени t2', происходит запуск двигателя 10, а нижний предел переходит от нижнего предела LlS (10%) при остановленном двигателе до нижнего предела LlR (20%) при работающем двигателе. Тем не менее, если для нижнего предела разрешено снова переходить к нижнему пределу LlR при работающем двигателе, то двигатель 10 будет снова остановлен, поскольку текущее положение педали сцепления в этом случае перейдет на сторону отпущенного положения изменяемого порогового значения Th1, которое, безусловно, также будет перемещено к 20%, поскольку изменяемое пороговое значение Th1 не может быть ниже нижнего предела независимо от того, какой установлен нижний предел.
Для того чтобы устранить данную проблему, изменяемое пороговое значение Th1 и нижний предел устанавливают таким образом, чтобы следовать за положением педали сцепления на расстоянии приблизительно 3% с запуска двигателя и до тех пор, пока положение педали сцепления не достигнет 23%, после чего изменяемое пороговое значение Th1 имеет значение, равное 20%, как обозначено точкой Р6. После этого в точке Р6 нижний предел снова устанавливают на 20% в соответствии с требованиями для нижнего предела LlR, применяемого при работающем двигателе.
При дальнейшем перемещении педали 25 сцепления в направлении нажатого положения из точки Р6, изменяемое пороговое значение Th1 продолжит следовать за положением педали сцепления на расстоянии приблизительно 3% до тех пор, пока педаль сцепления не достигнет 33%, а значение изменяемого порогового значения не будет равно 30%, как обозначено точкой P7. Изменяемое пороговое значение Th1 ограничено верхним пределом Lu таким образом, что оно не может далее следовать за положением педали сцепления и будет установлено на 30%, как обозначено горизонтальной линией, выходящей из точки P7. Изменяемое пороговое значение Th1 останется установленным на 30% хода педали до тех пор, пока педаль 25 сцепления снова не пересечет верхний предел со стороны нажатого положения.
В случае, показанном на Фиг.4B, водитель оперирует педалью 25 сцепления таким образом, чтобы переместить ее в направлении полностью нажатого положения, но перемещает ее только до 15% от нажатого положения и не отпускает ее полностью (0%), то есть оставляет ногу на сцеплении. Затем, по истечении небольшого периода времени, водитель нажимает на педаль 25 сцепления для того, чтобы переместить ее в полностью нажатое положение (100%).
Поскольку история изменения положения педали сцепления такова, что педаль сцепления была перемещена в более нажатое положение, чем верхний предел Lu (30%), то изменяемое пороговое значение Th1 будет подтянуто к верхнему пределу Lu и, таким образом, будет находиться на значении 30%.
Следовательно, когда водитель отпускает педаль 25 сцепления до положения, несколько менее нажатого, чем 30% хода педали, как обозначено точкой P1', пороговое значение Th1 будет пересечено, и будет начата остановка двигателя 10. В то время как педаль 25 сцепления остается отпущенной в переходной зоне «T», изменяемое пороговое значение Th1 следует за текущим положением педали сцепления, чтобы находиться на стороне нажатого положения текущего положения сцепления.
Тем не менее, когда нижний предел LlR достигнут, как обозначено точкой P2', изменяемое пороговое значение Th1 может более не следовать за положением педали сцепления, поскольку оно ограничено значением, заданным для нижнего предела LlR, составляющим в данном случае 20%. Следовательно, изменяемое пороговое значение Th1 остается на уровне 20%, как обозначено горизонтальной пунктирной линией, проходящей между точками P2' и P3'.
В точке P3', соответствующей моменту времени t0', скорость (N) двигателя достигла нуля и, таким образом, двигатель 10 был остановлен, поэтому нижний предел был изменен с предела при работающем двигателе LlR на предел при неработающем двигателе LlS. Нижний предел LlS при неработающем двигателе в данном случае установлен на 10% и, следовательно, сразу после остановки двигателя 10 изменяемое пороговое значение Th1 переключения быстро перемещается на новое значение, на 3% превышающее текущее положение педали сцепления, как обозначено переходом из точки P3' в точку P4'. Нижний предел LlS перемещен на 10%, но изменяемое пороговое значение Th1 не может следовать за ним до конца, поскольку в этом случае оно должно пересечь текущее положение педали сцепления. Следовательно, несмотря на то, что нижний предел LlS установлен на 10%, изменяемое пороговое значение Th1 ограничено так, чтобы остаться на стороне нажатого положения текущего положения педали сцепления (15%), с целью предотвращения немедленного повторного запуска. Данный случай аналогичен ситуации, имеющей место в промежутке между точками P1' и P2', где он следует за положением педали сцепления, и применен аналогичный метод.
В показанном примере имеет место временная задержка длительностью несколько секунд, произошедшая, вероятно, по причине остановки транспортного средства у светофора. Во время данной задержки педаль 25 сцепления остается на уровне 15% хода педали, и двигатель 10 остается остановленным.
Затем в момент t1' времени водитель начинает нажимать на педаль 25 сцепления для того, чтобы переместить ее в полностью нажатое положение. Двигатель 10 не будет запущен немедленно, поскольку изменяемое пороговое значение Th1 задано на 18%, однако сразу после пересечения изменяемого порогового значения Th1, которое в данном случае имеет место в точке P5', происходит запуск двигателя 10. После этого необходимо, чтобы нижний предел был перемещен от нижнего предела LlS (10%) при остановленном двигателе до нижнего предела LlR (20%) при работающем двигателе. Тем не менее, если нижний предел снова сразу же был переключен на нижний предел LlR при работающем двигателе, то он превысит положение педали сцепления, и двигатель 10 снова будет остановлен. Это происходит потому, что текущее положение педали сцепления в этом случае перейдет на сторону отпущенного положения изменяемого порогового значения Th1, которое также будет перемещено к 20%, поскольку изменяемое пороговое значение Th1 не может быть ниже нижнего предела вне зависимости от того, какой установлен нижний предел.
Для того чтобы устранить данную проблему, изменяемое пороговое значение Th1 и нижний предел следуют за положением педали сцепления на небольшом расстоянии (в данном примере 3%) с запуска двигателя и до тех пор, пока положение педали сцепления CP не достигнет 23%, после чего в данный момент времени изменяемое пороговое значение Th1 имеет значение, равное 20%, как обозначено точкой P6'. Нижнее пороговое значение может быть отрегулировано с определенным шагом с помощью алгоритма перехода, изложенного далее.
После этого в точке P6' нижний предел снова установлен на значение нижнего предела при работающем двигателе (LlR=20%), для того чтобы соответствовать требованиям для работающего двигателя.
По мере перемещения педали 25 сцепления далее за точку P6', изменяемое пороговое значение Th1 продолжает следовать за положением педали сцепления на расстоянии приблизительно 3% до тех пор, пока положение педали сцепления не достигнет 33%, при этом изменяемое пороговое значение Th1 равно 30%, как обозначено точкой P7'. Изменяемое пороговое значение Th1 ограничено верхним пределом Lu таким образом, что оно не может далее следовать за положением педали сцепления и будет установлено на 30%, как обозначено горизонтальной линией, выходящей из точки P7'. Изменяемое пороговое значение Th1 останется установленным на 30% хода педали до тех пор, пока педаль 25 сцепления снова не пересечет верхний предел со стороны нажатого положения.
В ситуации, показанной на Фиг.4C, водитель оперирует педалью 25 сцепления таким образом, чтобы переместить ее в полностью отпущенное положение 0%. Далее водитель отпускает педаль 25 сцепления для того, чтобы переместить ее из полностью нажатого положения в положение, в котором педаль 25 сцепления нажата на 15% своего хода, до остановки двигателя.
Поскольку история изменения положения педали сцепления такова, что педаль сцепления была перемещена в более нажатое положение, чем верхний предел Lu (30%), то изменяемое пороговое значение Th1 было перемещено до верхнего предела Lu и, следовательно, будет оставлено на 30%.
Следовательно, когда водитель отпускает педаль 25 сцепления до положения, несколько менее нажатого, чем 30% хода педали, как обозначено точкой Р1'', пороговое значение Th1 будет пересечено, и будет начата остановка двигателя 10. В то время как педаль 25 сцепления остается отпущенной в переходной зоне «T», изменяемое пороговое значение Th1 следует за текущим положением педали сцепления, чтобы быть установленным на стороне нажатого положения текущего положения сцепления.
Тем не менее, когда нижний предел LlR достигнут, как обозначено точкой P2'', изменяемое пороговое значение Th1 может более не следовать за положением CP педали сцепления, поскольку оно ограничено значением, заданным для нижнего предела LlR, составляющим в данном случае 20%. Следовательно, изменяемое пороговое значение Th1 остается равным значению 20%, как обозначено горизонтальной пунктирной линией, проходящей между точками P2'' и P3''.
В момент времени t2, соответствующий точке P3'', скорость (N) двигателя достигает нуля, и двигатель 10 остановлен.
Поскольку водитель немедленно переместил педаль сцепления из полностью отпущенного положения (0%) в момент времени t1 в нажатое положение, равное 15% хода педали до останова двигателя 10 в момент времени t2, результат аналогичен ситуации, описанной ранее со ссылкой на Фиг.4B.
В точке Р3ʺ, поскольку двигатель 10 остановлен, нижний предел изменен с предела при работающем двигателе LlR на предел при неработающем двигателе LlS. Нижний предел LlS при неработающем двигателе в данном случае задан на 10% и, следовательно, сразу после остановки двигателя 10 изменяемое пороговое значение Th1 переключения быстро перемещается на новое значение, в данном случае на 3% превышающее текущее значение педали сцепления, как обозначено переходом из точки P3'' в точку P4''. Нижний предел LlS перемещен на 10%, но изменяемое пороговое значение Th1 не может следовать за ним до конца, поскольку в этом случае оно должно пересечь текущее положение педали сцепления. Следовательно, несмотря на то, что нижний предел LlS установлен на 10%, изменяемое пороговое значение Th1 ограничено так, чтобы быть оставленным на стороне нажатого положения текущего положения педали сцепления, с целью предотвращения немедленного повторного запуска.
В показанном примере имеет место временная задержка длительностью несколько секунд, во время которой педаль 25 сцепления остается на уровне 15% хода педали, и двигатель 10 остается остановленным. Затем в момент времени t3 водитель начинает нажимать на педаль 25 сцепления, чтобы переместить ее в полностью нажатое положение. Двигатель 10 не будет запущен немедленно, поскольку изменяемое пороговое значение Th1 задано на 18%, однако сразу после пересечения изменяемого порогового значения Th1, что в данном случае происходит в момент времени t3', соответствующий точке P5'', происходит запуск двигателя 10. Как изложено выше, после этого необходимо, чтобы нижний предел L1 был перемещен от нижнего предела LlS (10%) при остановленном двигателе до нижнего предела LlR (20%) при работающем двигателе. Тем не менее, если нижний предел Ll снова сразу же был переключен на нижний предел LlR при работающем двигателе, то он превысит положение педали сцепления, и двигатель 10 снова будет остановлен. Это происходит потому, что текущее положение педали сцепления в этом случае перейдет на сторону отпущенного положения изменяемого порогового значения Th1, которое также будет перемещено к 20%, поскольку изменяемое пороговое значение Th1 не может быть ниже нижнего предела вне зависимости от того, какой установлен нижний предел.
Для того чтобы устранить данную проблему, изменяемое пороговое значение Th1 и нижний предел следуют за положением педали сцепления на небольшом расстоянии (в данном примере 3%) с запуска двигателя и до тех пор, пока положение педали сцепления не достигнет 23%, после чего в данный момент времени изменяемое пороговое значение Th1 имеет значение, равное 20%, как обозначено точкой Р6''. Изменение нижнего предела может быть выполнено с помощью алгоритма, изложенного далее. После этого в точке P6'' нижний предел снова установлен на значение нижнего предела при работающем двигателе (LlR=20%), чтобы соответствовать требованиям для работающего двигателя.
По мере дальнейшего перемещения педали 25 сцепления изменяемое пороговое значение Th1 продолжает следовать за положением педали сцепления на расстоянии приблизительно 3% до тех пор, пока положение педали сцепления не достигнет 33%, при этом изменяемое пороговое значение Th1 равно 30%, как обозначено точкой P7''. Изменяемое пороговое значение Th1 ограничено верхним пределом Lu таким образом, что оно не может далее следовать за положением педали сцепления и останется установленным на 30%, как обозначено горизонтальной линией, выходящей из точки P7''. Изменяемое пороговое значение Th1 останется установленным на 30% хода педали до тех пор, пока педаль 25 сцепления снова не пересечет верхний предел со стороны нажатого положения.
В ситуации, показанной на Фиг.4D, водитель оперирует педалью 25 сцепления таким образом, чтобы переместить ее в полностью отпущенное положение (0% хода педали). Далее водитель отпускает педаль 25 сцепления в момент времени t2''' и перемещает ее в положение, в котором педаль 25 сцепления нажата на 15% своего хода, однако в данном случае после остановки двигателя в момент времени t0.
Поскольку история изменения положения педали сцепления такова, что педаль сцепления была перемещена в более нажатое положение, чем верхний предел Lu (30%), то изменяемое пороговое значение Th1 было перемещено до верхнего предела Lu и, следовательно, будет оставлено на 30%.
Следовательно, когда водитель отпускает педаль 25 сцепления до положения, несколько менее нажатого, чем 30% хода педали, как обозначено точкой P1''', пороговое значение Th1 будет пересечено, и будет начата остановка двигателя 10. В то время как педаль 25 сцепления остается отпущенной в переходной зоне «T», изменяемое пороговое значение Th1 следует за текущим положением педали сцепления с тем, чтобы быть установленным на стороне нажатого положения текущего положения сцепления.
Однако, когда нижний предел LlR достигнут, как обозначено точкой P2''', изменяемое пороговое значение Th1 может более не следовать за положением педали сцепления, поскольку оно ограничено значением, заданным для нижнего предела LlR, составляющего в данном случае 20%. Следовательно, изменяемое пороговое значение Th1 равно постоянному значению 20%, как обозначено горизонтальной пунктирной линией, проходящей между точками P2''' и P3'''.
В точке P3''' скорость (N) двигателя достигла нуля, как обозначено точкой t0, и двигатель 10 остановлен.
В момент времени P3''', поскольку двигатель 10 был остановлен, нижний предел изменен с предела для работающего двигателя LlR на предел для неработающего двигателя LlS, обозначенного точкой P4'''. Нижний предел LlS при неработающем двигателе в данном случае задан на 10% и, следовательно, сразу после остановки двигателя 10 изменяемое пороговое значение Th1 переключения быстро перемещается на новое значение, равное 10%, как обозначено переходом из точки P3''' в точку P4'''.
Нижний предел Ll установлен на 10%, и изменяемое пороговое значение Th1 следует за ним до конца, поскольку положение педали сцепления равно 0% от нажатого положения в данный момент времени.
Затем после чрезвычайно короткой временной задержки водитель начинает нажимать на педаль 25 сцепления в момент времени t2''' таким образом, чтобы переместить ее по направлению к 15% хода педали, поскольку имела место повторная регулировка положения ноги на педали, и тем самым удержание сцепления. Поскольку нижний предел Ll установлен на уровне LlS для неработающего или остановленного двигателя, то запуск двигателя 10 происходит, когда положение педали сцепления пересекает нижний предел LlS в точке P8''', поскольку изменяемое пороговое значение Th1 также установлено на 10%.
Поскольку двигатель 10 работает, нижний предел необходимо переместить от нижнего предела LlS (10%) при остановленном двигателе до нижнего предела LlR (20%) при работающем двигателе.
Тем не менее, если нижний предел снова сразу же был переключен на нижний предел LlR при работающем двигателе, то он превысит положение педали сцепления, и двигатель 10 снова будет остановлен. Это происходит потому, что текущее положение педали сцепления в этом случае перейдет на сторону отпущенного положения изменяемого порогового значения Th1, которое также будет перемещено к 20%, поскольку изменяемое пороговое значение Th1 не может быть ниже нижнего предела (LlR или LlS) вне зависимости от того, какой установлен нижний предел.
Чтобы устранить данную проблему, изменяемое пороговое значение Th1 и нижний предел устанавливают ниже положения педали сцепления на небольшом расстоянии (в данном примере 3%) с запуска двигателя и до тех пор, пока положение педали сцепления CP не достигнет 15% в точке P10''', после чего в данный момент времени изменяемое пороговое значение Th1 равно 12%, как обозначено точкой P9'''.
Далее в данном примере осуществления изобретения водитель удерживает педаль 25 сцепления на уровне 15% хода педали в течение короткого времени, как обозначено горизонтальной линией, проходящей от точки P10''' до точки P5'''.
В течение периода времени от точки P10''' до точки P5''' изменяемое пороговое значение Th1 остается равным 12% так же, как и нижний предел, который ограничен тем, что он не может превысить значение положения педали сцепления.
В точке P5''' водитель начинает перемещать педаль сцепления по направлению к полностью нажатому положению, и нижний предел и измеряемое пороговое значение Th1 следуют за положением педали сцепления на расстоянии 3% к нижнему пределу LlR (20%) для работающего двигателя, как обозначено точкой P6''', при этом положение педали сцепления соответствует 23%, поскольку изменяемое пороговое значение Th1 следует за положением педали сцепления на расстоянии 3%.
В точке P6''' нижний предел переустановлен на значение нижнего предела при работающем двигателе (LlR=20%), чтобы соответствовать требованиям для работающего двигателя.
Поскольку педаль 25 сцепления перемещают в направлении нажатого положения, изменяемое пороговое значение Th1 продолжает следовать за положением педали сцепления на расстоянии приблизительно 3% до тех пор, пока положение педали сцепления не достигнет 33%, при этом изменяемое пороговое значение Th1 равно 30%, как обозначено точкой P7'''. Изменяемое пороговое значение Th1 ограничено верхним пределом Lu таким образом, что оно не может далее следовать за положением педали сцепления и будет установлено на 30%, как обозначено горизонтальной линией, выходящей из точки P7'''. Изменяемое пороговое значение Th1 остается установленным на 30% хода педали до тех пор, пока педаль 25 сцепления снова не пересечет верхний предел со стороны нажатого положения.
Следовательно, в данном случае водитель получает обратную связь о том, что его действие по повторной установке ноги на педаль уменьшает возможность остановки двигателя 10 с целью сокращения потребления топлива за счет того, что после остановки двигателя 10 происходит повторный его запуск, как только водитель устанавливает свою ногу на педаль сцепления.
Старт-стопная система может обнаруживать такую ситуацию и подавать визуальное предупреждение водителю о том, что не следует удерживать педаль 25 сцепления.
На Фиг.5 в виде схемы представлен способ управления запуском и остановкой двигателя 10 транспортного средства 5 согласно изобретению, который представляет собой различные алгоритмы и рабочие процедуры в электронном блоке 16 управления и/или электронном процессоре 16C положения педали сцепления.
Способ начинается на этапе 310, где определяют, остановлен двигатель 10 или нет.
Если двигатель 10 остановлен, то способ переходит к этапу 320, где верхний и нижний пределы (Lu и LlS) для переходной зоны «T» устанавливают на 30% и 10% хода педали соответственно.
Затем способ переходит к этапу 325, где проверяют, работает ли двигатель 10, то есть не остановлен ли он. Если двигатель 10 не работает, то есть он остановлен, то способ непрерывно циклически проходит этап 325 с теми же данными о верхнем и нижнем пределах Lu и LlS до тех пор, пока режим двигателя 10 не будет изменен на «не остановлен».
Если на этапе 325 обнаружено, что двигатель 10 не остановлен, то есть находится в процессе запуска или уже запущен, то способ переходит на этап 328. На этапе 328 нижний предел должен быть увеличен с уровня, установленного для неработающего двигателя (в данном примере LlS=10% хода педали), до уровня, который необходимо установить для работающего двигателя (в данном примере LlR=20% хода педали).
Важно, чтобы нижний предел не превышал значения положения педали сцепления, поскольку это немедленно приведет к возвращению в режим остановленного двигателя.
Следовательно, для достижения данной цели нижний предел перехода устанавливают до достижения нижнего предела LlR с помощью следующего алгоритма:
Rl(t)=MIN(RlR, Max(Rl(t-1), Th1)),
где Rl(t) = нижний предел перехода, который необходимо установить;
Rl(t-1) = последнее значение заданного нижнего предела перехода;
Th1 = текущее изменяемое пороговое значение;
LlR = заранее заданное значение, выбранное в качестве нижнего предела при работающем двигателе.
Если в качестве заранее заданного значения, выбранного для нижнего предела LlR при работающем двигателе, использовано 20%, то: Rl(t)=MIN(20, Max(Rl(t-1), Th1)).
Другими словами, Rl(t) равно минимум 20% или максимальному значению из предыдущего значения Rl(t-1) из последней последовательности и текущего значения изменяемого порогового значения Th1 в зависимости от того, какое значение больше.
Например, если Th1=14% и Rl(t-1)=12%, то
Rl(t)=Min (20% и Max (14% или 12%))
Rl(t)= Min (20% или 14%)
Rl(t)=14%.
В качестве другого примера, если Th1=22% и Rl(t-1)=19%, то
Rl(t)=Min (20 и Мах (22 или 19)).
Следовательно, в данном случае Rl(t)=20%.
Следует понимать, что значения, используемые в качестве примера, не являются ограничивающими, и что могут быть использованы другие верхние и нижние пределы в зависимости от конструкции и характеристик соответствующей системы включения сцепления, и значения могут представлять собой уровни сигналов вместо процентного выражения.
Следует понимать, что нижний предел LlR при работающем двигателе должен быть установлен выше, то есть в более нажатом положении, чем ожидаемое положение педали сцепления, так как водитель транспортного средства удерживает ногу на сцеплении. Следовательно, в приведенных примерах нижний предел LlR установлен на 20%, поскольку положение педали сцепления при удержании ее водителем предположительно соответствует 15% хода педали.
Следует понимать, что нижний предел LlS при неработающем двигателе должен быть установлен ниже, то есть быть на уровне менее нажатого положения, чем ожидаемое положение педали сцепления, так как водитель транспортного средства удерживает ногу на сцеплении. Следовательно, в приведенных примерах нижний предел LlS установлен на 10%, поскольку положение педали сцепления при удержании ее водителем соответствует 15% от полностью нажатого положения.
Несмотря на то, что в приведенных примерах значение нижнего предела при работающем двигателе равно 20%, следует понимать, что такое значение не является обязательным, и нижний предел LlR при работающем двигателе может находиться в диапазоне от 18 до 25% от полностью нажатого положения в случае применения верхнего предела Lu, равного 30%.
Аналогичным образом, несмотря на то, что было использовано значение LlS при остановленном двигателе, равное 10%, оно не является обязательным, и значение нижнего предела LlS может находиться в диапазоне от 6 до 12% от полностью нажатого положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ ВЫРАБОТКИ ВЫВОДА УПРАВЛЕНИЯ ИЗ СИСТЕМЫ СЧИТЫВАНИЯ ПОЛОЖЕНИЯ СЦЕПЛЕНИЯ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2627952C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ СО СТАРТ-СТОПНОЙ СИСТЕМОЙ | 2014 |
|
RU2656538C2 |
| СПОСОБ АДАПТИВНОГО ВКЛЮЧЕНИЯ СЦЕПЛЕНИЯ | 2013 |
|
RU2658238C2 |
| СПОСОБ ОЦЕНКИ ПОЛОЖЕНИЯ СЦЕПЛЕНИЯ | 2013 |
|
RU2634855C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ОСТАНОВКОЙ И ЗАПУСКОМ АВТОМОБИЛЬНОГО ДВИГАТЕЛЯ, А ТАКЖЕ АВТОМОБИЛЬ, СОДЕРЖАЩИЙ ТАКУЮ СИСТЕМУ | 2014 |
|
RU2675985C2 |
| СПОСОБ УПРАВЛЕНИЯ ОСТАНОВОМ И ПУСКОМ ДВИГАТЕЛЯ И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2707180C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ СО СТАРТЕРНЫМ МОТОРОМ | 2014 |
|
RU2684155C2 |
| СПОСОБ УПРАВЛЕНИЯ ПУСКОМ И ОСТАНОВКОЙ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2014 |
|
RU2652268C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТ-СТОПНОЙ СИСТЕМОЙ ДВИГАТЕЛЯ | 2012 |
|
RU2604831C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ МУФТОЙ СЦЕПЛЕНИЯ ТРАНСМИССИИ АВТОМОБИЛЯ С РУЧНЫМ ПЕРЕКЛЮЧЕНИЕМ | 2016 |
|
RU2731647C2 |
Настоящее изобретение относится к автомобильным транспортным средствам, в частности к способу улучшения работы старт-стопной системы двигателя транспортного средства. Способ управления запуском и остановкой двигателя 10 автомобильного транспортного средства 5, содержит этапы на которых изменяют нижний предел Ll порогового значения положения педали сцепления между верхним значением LlR и нижним значением LlS во время изменения режима работы двигателя 10 с рабочего режима к остановленному состоянию. Нижний предел Ll и верхний предел Lu задают рабочий диапазон для изменяемого порогового значения Th1 положения педали сцепления. Если педаль сцепления пересекает изменяемое пороговое значение Th1 из-за перемещения водителем автомобильного транспортного средства 5 педали 25 сцепления, это вызывает изменение рабочего режима двигателя 10 в зависимости от направления перемещения педали 25 сцепления. Техническим результатом является снижение расхода топлива и уменьшение вредных выбросов за счет уменьшения случаев упущенных возможностей остановки двигателя. 3 н. и 10 з.п. ф-лы, 8 ил.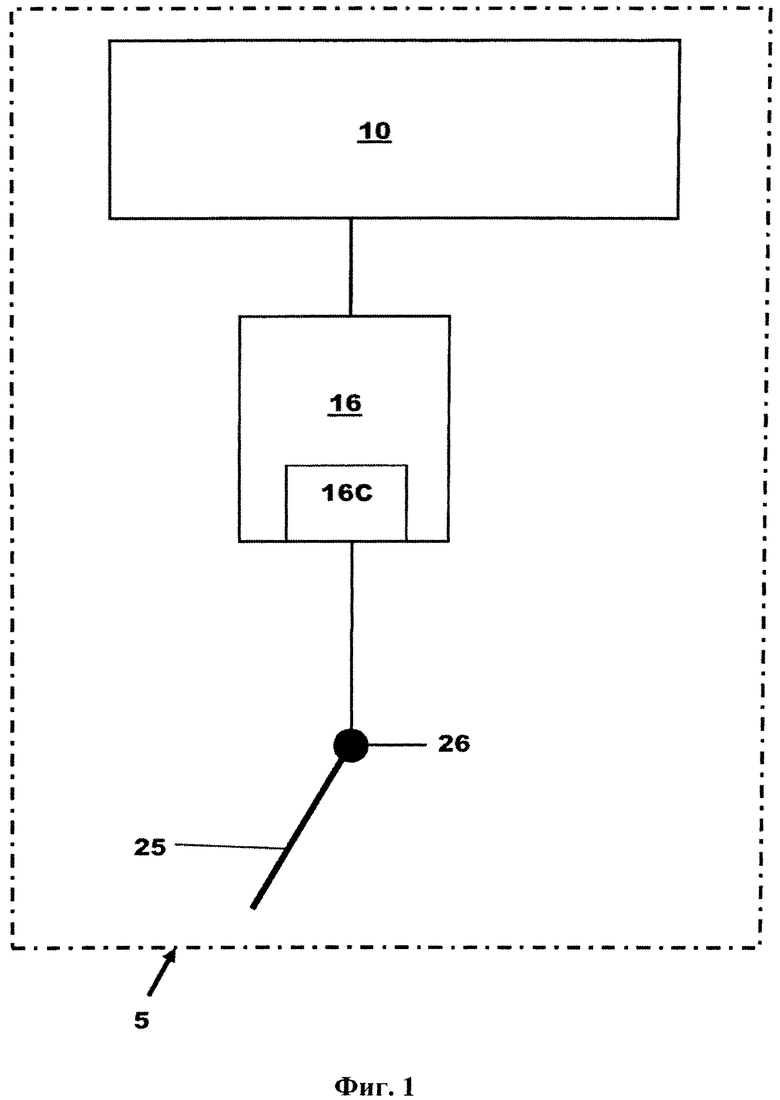
1. Способ управления работой старт-стопной системы двигателя транспортного средства, в котором изменение рабочего режима двигателя происходит при прохождении порогового значения положения педали сцепления, отличающийся тем, что определяют верхний и нижний пределы порогового значения положения педали сцепления и уменьшают нижний предел с первого значения при работающем двигателе до второго значения, соответствующего менее нажатой педали сцепления, при остановленном двигателе.
2. Способ по п.1, в котором первое значение соответствует положению педали сцепления, которое является более нажатым, чем ожидаемое положение педали сцепления, по причине того, что водитель транспортного средства удерживает ногу на педали сцепления.
3. Способ по п.1, в котором второе значение соответствует положению педали сцепления, которое является менее нажатым, чем ожидаемое положение педали сцепления, по причине того, что водитель транспортного средства удерживает ногу на педали сцепления.
4. Способ по п.1, в котором нижний предел дополнительно изменяют со второго значения до первого значения при изменении режима двигателя с остановленного состояния на рабочий режим, не вызывая перехода двигателя из рабочего режима снова к остановленному состоянию.
5. Способ по п.4, в котором нижний предел изменяют таким образом, чтобы он имел минимальное значение нажатого положения и максимальное значение из предыдущего нижнего предела и текущего порогового значения положения педали сцепления.
6. Способ по любому из пп.1-5, в котором определяют рабочий режим двигателя и на этом основании выбирают первое или второе значение нажатого положения.
7. Способ по п.6, в котором если было определено, что режим двигателя изменился с остановленного состояния на рабочий режим, то увеличивают нижний предел с определенным шагом со второго, менее нажатого положения педали сцепления до первого значения.
8. Старт-стопная система двигателя для транспортного средства, которая содержит электронный блок управления и датчик положения педали сцепления для определения положения педали сцепления, при этом электронный блок управления выполнен с возможностью изменять рабочий режим двигателя, когда измеряемое положение педали сцепления изменяется таким образом, что проходит через пороговое значение, заданное электронным блоком управления, а также с возможностью задавать верхний и нижний пределы для порогового значения положения педали сцепления, причем электронный блок управления выполнен с возможностью уменьшать нижний предел с первого значения нажатого положения педали сцепления при работающем двигателе до второго, менее нажатого положения педали сцепления при остановленном двигателе.
9. Система по п.8, в которой первое значение нажатого положения соответствует положению педали сцепления, которое является более нажатым, чем ожидаемое положение педали сцепления, по причине того, что водитель транспортного средства удерживает ногу на педали сцепления.
10. Система по п.8, в которой второе значение нажатого положения соответствует положению педали сцепления, которое является менее нажатым, чем ожидаемое положение педали сцепления, по причине того, что водитель транспортного средства удерживает ногу на педали сцепления.
11. Система по любому из пп.8-10, в которой электронный блок управления выполнен с возможностью также изменять нижний предел со второго значения нажатого положения до первого значения нажатого положения, когда режим двигателя меняется с остановленного состояния на рабочий режим, не вызывая перехода двигателя из рабочего режима снова к остановленному состоянию.
12. Система по п.11, в которой блок управления может изменять нижний предел таким образом, чтобы он имел минимальное значение нажатой педали и максимальное значение нажатой педали из предыдущего нижнего предела и текущего значения порогового значения положения педали сцепления.
13. Автомобильное транспортное средство, имеющее двигатель, педаль сцепления для управления состоянием включения сцепления и старт-стопную систему двигателя по любому из пп.8-12.
| СПОСОБ УПРАВЛЕНИЯ СТАРТ-СТОПНОЙ СИСТЕМОЙ ДВИГАТЕЛЯ | 2012 |
|
RU2604831C2 |
| СПОСОБ ДЛЯ ВЫРАБОТКИ ВЫВОДА УПРАВЛЕНИЯ ИЗ СИСТЕМЫ СЧИТЫВАНИЯ ПОЛОЖЕНИЯ СЦЕПЛЕНИЯ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2627952C2 |
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ПОЛУЧЕНИЯ ИСКУССТВЕННОЙ ПОРОДЫ | 2011 |
|
RU2466109C1 |
| III-НИТРИДНЫЕ СВЕТОИЗЛУЧАЮЩИЕ УСТРОЙСТВА, ВЫРАЩЕННЫЕ НА СТРУКТУРЕ ДЛЯ УМЕНЬШЕНИЯ ДЕФОРМАЦИИ | 2007 |
|
RU2466479C2 |
| US 20120196723 A1 02.08.2012 | |||
| US 20120295759 A1 22.11.2012. | |||

