Область техники, к которой относится изобретение
Настоящее изобретение относится к транспортному средству, имеющему двигатель внутреннего сгорания, а более конкретно к способу оценки состояния сцепления, соединяющего двигатель и механическую коробку передач.
Уровень техники
Из уровня техники известны транспортные средства, имеющие механическую коробку передач со старт-стопной системой для автоматической остановки и запуска двигателя внутреннего сгорания, используемого для создания двигательной энергии транспортного средства.
Старт-стопная система автоматически останавливает двигатель всякий раз, когда это позволяет снизить расход топлива и уменьшить количество выбросов из двигателя.
Если в транспортном средстве предусмотрена функция автоматического запуска и остановки, необходимо знать, когда вращающий момент передается от двигателя на одно или более ведомых ходовых колес. В некоторых вариантах реализации старт-стопные системы останавливают и перезапускают двигатель только на нейтральной передаче (SIN), в других вариантах остановка и перезапуск также возможны при включенной передаче, когда полностью выжата педаль сцепления (SIG).
Для системы управления запуском и остановкой важно иметь информацию о том, что вращающий момент не будет передаваться (коробка передач находится в нейтральном положении либо выключено сцепление) до того, как двигатель будет перезапущен, особенно если перезапуск двигателя автоматически запрашивается старт-стопной системой (например, из-за низкого заряда аккумулятора или высокого потребления энергии блоком кондиционирования воздуха), а следовательно, является неожиданным для водителя.
В старт-стопных системах с механической коробкой передач, для выявления намерения водителя двигаться при нажатой педали сцепления, обычно используется пороговое значение между положениями «нажатая педаль/отпущенная педаль», показывающее, что старт-стопная система может выполнить запуск двигателя. Аналогичное пороговое значение может быть также использовано для выявления ситуации, в которой водитель отпустил педаль сцепления и намеревается остановиться на достаточно длительное время для того, чтобы старт-стопная система могла выключить двигатель с целью экономии топлива.
Запуск двигателя с включенной коробкой передач может привести к неожиданному движению транспортного средства, в результате чего может возникнуть опасная ситуация.
В случаях остановки на нейтральной передаче (Stop-in-Neutral, SIN) при использовании механической коробки передач для определения того, что коробка передач находится на нейтральной передаче, а следовательно, вращающий момент не будет передаваться, используют датчик нейтральной передачи (Gear Neutral Sensor, GNS), который передает контроллеру запуска-останова сигнал, сообщающий о том, выбрана ли нейтральная передача. Особенно важной проблемой является возможное некорректное сообщение от GNS о состоянии коробки передач, поскольку это может привести к перезапуску двигателя при включенной коробке передач, что приведет к непреднамеренному движению транспортного средства.
Для остановки на включенной передаче (Stop-in-Gear, SIG) в старт-стопных системах с механической коробкой передач необходимо руководствоваться указанием на то, что линия привода выключена. Это непростая задача, которая является одной из основных причин, из-за которой все изготавливаемые на данный момент старт-стопные системы с механической коробкой передач представляли собой системы SIN.
Для систем SIG было предложено использовать датчик концентрического исполнительного цилиндра (Concentric Slave Cylinder, CSC) вместе с датчиком главного цилиндра сцепления (Clutch Master Cylinder, CMC) или датчиком положения педали сцепления для того, чтобы обеспечить индикацию выключенного состояния сцепления. Однако транспортные средства обычно не оснащаются датчиком CSC и датчиком CMC или датчиком положения педали сцепления, поскольку это требует дополнительных расходов.
Кроме того, предварительно определенное пороговое значение момента выключения сцепления для датчика CSC трудно определить, и оно может быть сильно искажено из-за допусков между деталями и износа сцепления.
Кроме того, сдвиг момента включения сцепления по времени делает еще более сложной задачу определения одного фиксированного порогового значения датчика CSC для выключения сцепления, которое может быть достигнуто во время нормальных условий движения (т.е. требует нажатия педали сцепления водителем до конца или почти до конца хода педали).
Если установлены оба датчика CMC и CSC, можно обнаружить неисправность, например утечку в гидросистеме, но катастрофический отказ сцепления, приводящий к включению сцепления, не может быть выявлен. Подобный катастрофический отказ может привести к непреднамеренному движению транспортного средства, поэтому необходимо принять некоторые меры, направленные на обнаружение движения транспортного средства.
Таким образом, требуется разработка надежного, недорогого способа определения состояния сцепления, который позволит использовать систему SIG недорогим и безопасным образом.
Целью настоящего изобретения является создание экономически эффективного способа определения состояния сцепления.
Еще одной целью настоящего изобретения является создание экономически эффективного и надежного способа использования системы SIG.
Раскрытие изобретения
В соответствии с первым аспектом настоящего изобретения предлагается способ оценки состояния сцепления, соединяющего двигатель транспортного средства с многоступенчатой механической коробкой передач, передающей приводное усилие. Согласно способу заключение о том, что сцепление выключено, делают, если скорость транспортного средства практически равна нулю и выбрана передача коробки передач транспортного средства, двигатель работает, а передаваемый через сцепление крутящий момент практически равен нулю, в противном случае делают заключение о том, что выключенное состояние сцепления не подтверждено.
Преимущество данного подхода заключается в отсутствии необходимости использования большого количества дополнительного оборудования, поскольку нужные датчики уже установлены на транспортном средстве, приспособленном для работы в старт-стопном режиме.
Способ может также предусматривать измерение скорости транспортного средства.
Способ может также предусматривать определение того, находится ли коробка передач на нейтральной или включенной передаче.
Способ может также предусматривать определение того, работает ли двигатель.
Способ может также предусматривать определение того, передается ли вращающий момент через сцепление.
Способ может также предусматривать вывод о том, что сцепление выключено, если скорость транспортного средства по существу равна нулю, выбрана передача коробки передач транспортного средства, двигатель работает, крутящий момент, передаваемый через сцепление, по существу равен нулю, а также включен регулятор скорости холостого хода двигателя, в противном случае делают заключение, что выключенное состояние сцепления не подтверждено.
Способ может также предусматривать определение того, активен ли регулятор скорости холостого хода двигателя.
Способ может также предусматривать вывод о том, что сцепление выключено, если скорость транспортного средства по существу равна нулю, выбрана передача коробки передач транспортного средства, двигатель включен, крутящий момент, передаваемый через сцепление, по существу равен нулю и период стабилизации истек, в противном случае делают заключение, что выключенное состояние сцепления не подтверждено.
Способ может также предусматривать определение того, истек ли период стабилизации.
Способ может также включать в себя вывод о том, что сцепление выключено, если скорость транспортного средства по существу равна нулю, выбрана передача коробки передач транспортного средства, двигатель работает, крутящий момент, передаваемый через сцепление, по существу равен нулю и полностью нажата педаль сцепления, в противном случае делают заключение, что выключенное состояние сцепления не подтверждено.
Способ может также предусматривать определение положения педали сцепления.
Способ может также предусматривать использование информации о положении педали сцепления для определения того, выжата ли педаль сцепления.
Способ может также предусматривать вывод о том, что состояния сцепление выключено, если скорость транспортного средства по существу равна нулю, выбрана передача коробки передач транспортного средства, двигатель работает, крутящий момент, передаваемый через сцепление, по существу равен нулю, педаль тормоза выжата, в противном случае делают заключение, что выключенное состояние сцепления не подтверждено.
Способ может также предусматривать определение положения педали тормоза.
Способ может также предусматривать использование информации о положении педали тормоза для определения того, нажата ли педаль тормоза.
Способ может также предусматривать вывод о том, что сцепление выключено, если скорость транспортного средства по существу равна нулю, выбрана передача коробки передач транспортного средства, двигатель работает, крутящий момент, передаваемый через сцепление, по существу равен нулю, педаль газа выжата не полностью, в противном случае делают заключение, что выключенное состояние сцепления не подтверждено.
Способ может также предусматривать определение положения педали газа.
Способ может также предусматривать использование информации о положении педали газа для определения того, что педаль газа не нажата.
В соответствии со вторым аспектом изобретения предложен способ выполнения автоматической остановки двигателя транспортного средства, когда выбрана передача механической коробки передач, соединенной с двигателем с возможностью передачи приводного усилия через сцепление, включающий в себя оценку состояния сцепления с использованием способа по первому аспекту настоящего изобретения и остановку двигателя, если сделан вывод о том, что сцепление выключено и выполнено одно или более дополнительных условий для остановки двигателя.
Одно или более дополнительных условий для остановки двигателя могут включать в себя по существу нулевую скорость транспортного средства.
Способ может также предусматривать измерение скорости транспортного средства с помощью датчика скорости транспортного средства.
Одно или более дополнительных условий для остановки двигателя может включать в себя ненажатую педаль газа.
Способ может также предусматривать контроль положения педали газа с помощью датчика положения педали газа.
Одно или более дополнительных условий для остановки двигателя могут включать в себя нажатую педаль тормоза.
Способ может также предусматривать контроль положения педали тормоза с помощью датчика педали тормоза.
Одно или более дополнительных условий для остановки двигателя могут включать в себя отсутствие условий для блокировки остановки двигателя.
Условия для блокировки остановки двигателя могут включать в себя по крайней мере одно из следующего: высокое потребление энергии блоком кондиционирования воздуха, низкий уровень заряда аккумулятора и ошибка системы транспортного средства.
В соответствии с третьим аспектом настоящего изобретения предложено транспортное средство, имеющее двигатель, соединенный с механической коробкой передач с возможностью передачи приводного усилия через сцепление, и электронный контроллер, запрограммированный на оценку рабочего состояния сцепления, где электронный контроллер выполнен с возможностью делать заключение о том, что сцепление выключено, если скорость транспортного средства по существу равна нулю, выбрана передача коробки передач транспортного средства, двигатель работает, а крутящий момент, передаваемый через сцепление, по существу равен нулю, в противном случае контроллер делает заключение о том, что выключенное состояние сцепления не подтверждено.
Электронный контроллер может автоматически останавливать двигатель, если было установлено, что сцепление выключено и выполнено одно или более дополнительных условий для остановки двигателя.
Одно или более дополнительных условий для остановки двигателя могут включать в себя, по крайней мере, по существу нулевую скорость транспортного средства, ненажатую педаль газа транспортного средства, нажатую педаль тормоза транспортного средства и отсутствие условий для блокировки остановки двигателя.
Краткое описание чертежей
Изобретение будет далее описано на примере со ссылкой на следующие сопроводительные чертежи:
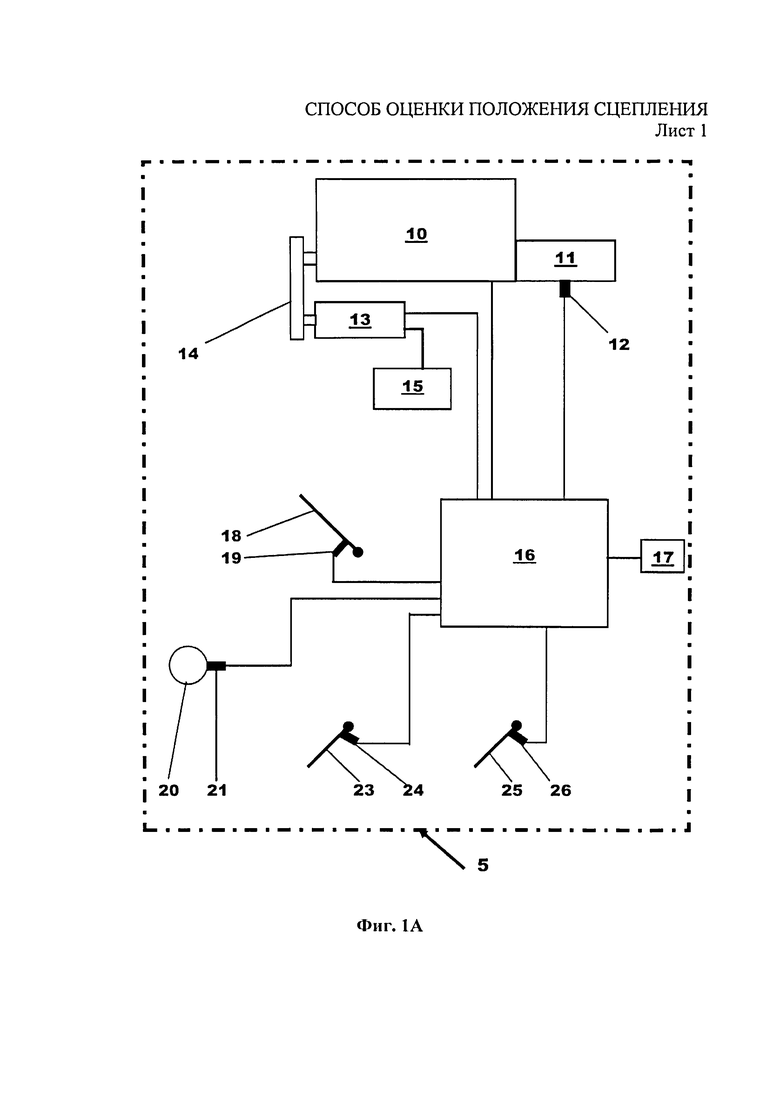
Фиг.1A представляет собой схематическое изображение транспортного средства, имеющего старт-стопную систему SIG по изобретению;
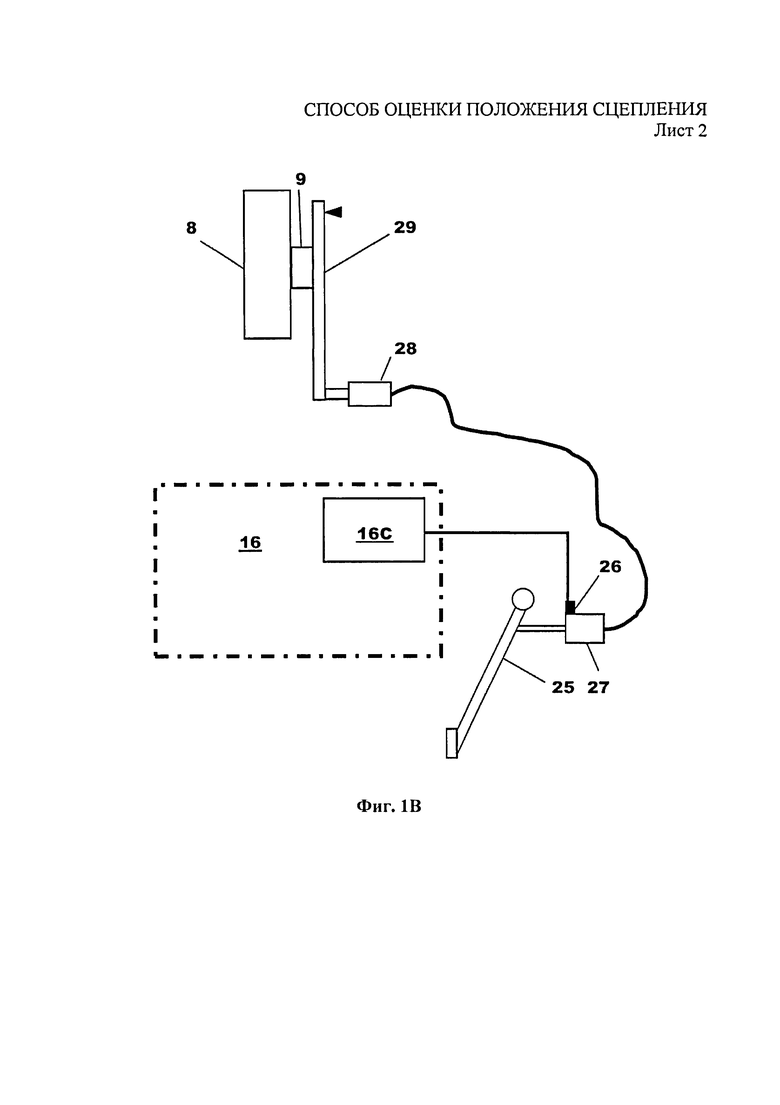
Фиг.1B представляет собой схематическое изображение системы привода сцепления, образующей часть старт-стопной системы с Фиг.1;
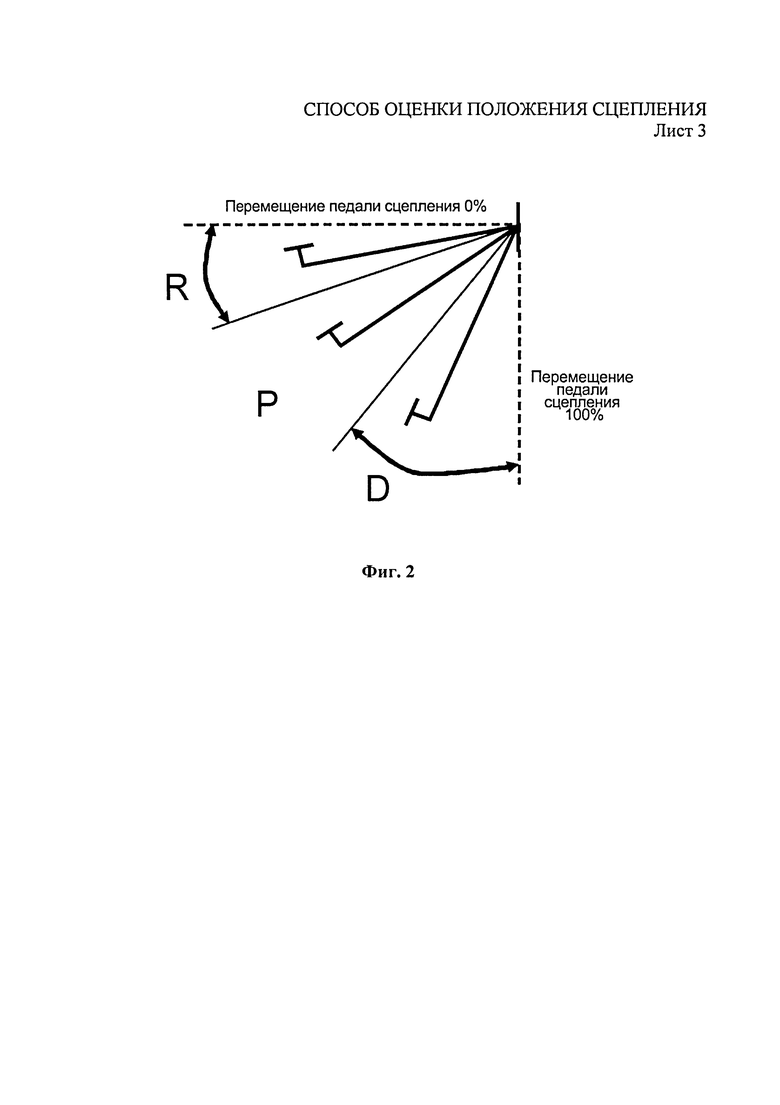
Фиг.2 представляет собой схематическое изображение рабочего диапазона перемещения педали сцепления, показывающее три заранее определенные зоны;
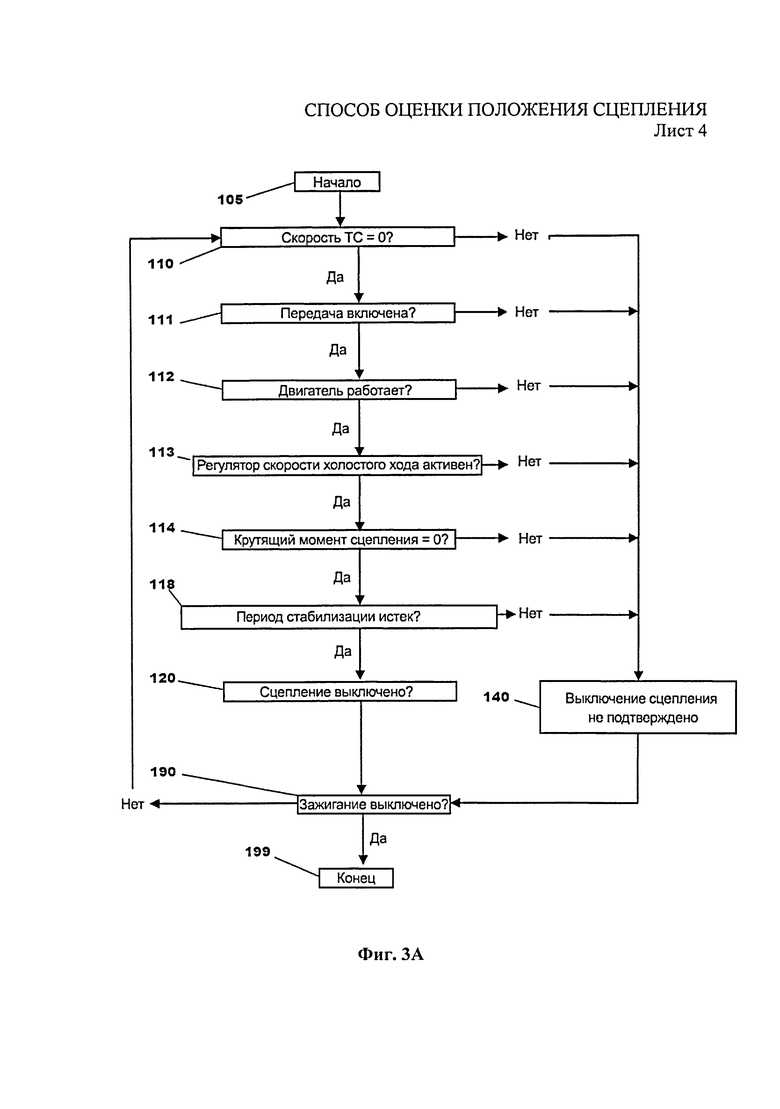
Фиг.3A представляет собой блок-схему, иллюстрирующую первый вариант способа оценки состояния сцепления в соответствии с первым аспектом настоящего изобретения;
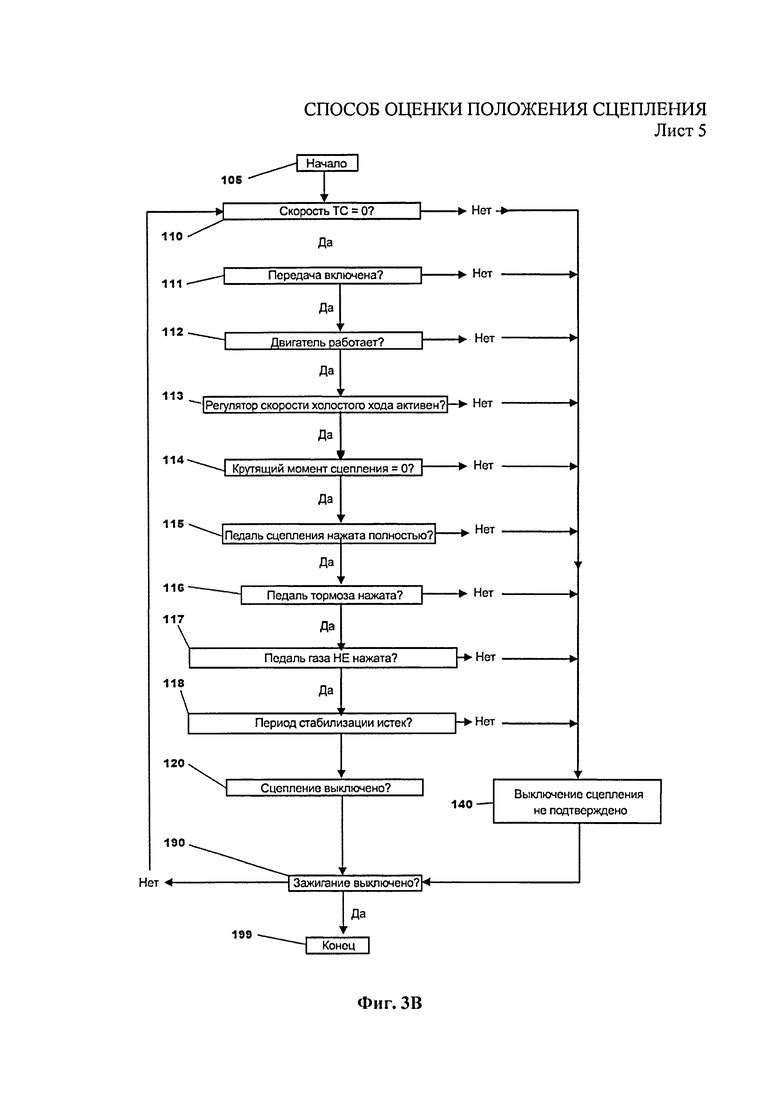
Фиг.3B представляет собой блок-схему, иллюстрирующую второй вариант способа оценки состояния сцепления в соответствии с первым аспектом настоящего изобретения;
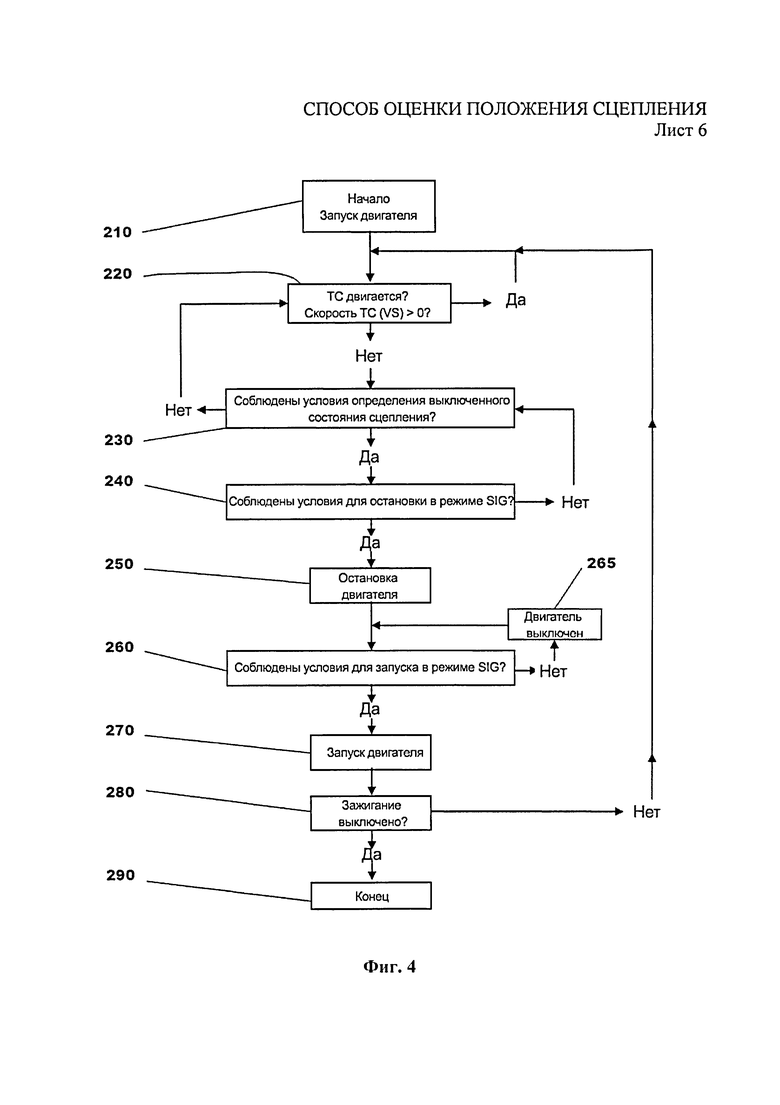
Фиг.4 представляет собой схематическую блок-схему, иллюстрирующую способ управления старт-стопной системой SIG, использующей состояние сцепления, оцененное в соответствии со вторым аспектом настоящего изобретения.
Осуществление изобретения
На Фиг.1A и 1B показано транспортное средство 5, имеющее двигатель 10, приводящий в движение многоступенчатую механическую коробку передач 11. Коробка передач 11 соединена с двигателем 10 с возможностью передачи приводного усилия через сцепление 8 (не показано на Фиг.1A), которое включается и выключается водителем транспортного средства 5 вручную, и она также имеет переключатель передач (не показан). Переключатель передач может быть вручную перемещен между несколькими положениями, включая по крайней мере одно положение, в котором может быть включена передача, являющаяся частью многоступенчатой коробки передач, и нейтральное положение, в котором ни одна передача многоступенчатой коробки передач не включена. Когда переключатель передач перемещен в нейтральное положение, механическая многоступенчатая коробка передач 11 находится в так называемом нейтральном состоянии, в котором она не передает приводное усилие. Когда переключатель передач перемещен в положение включенной передачи, многоступенчатая коробка передач 11 находится в так называемом состоянии включенной передачи, в котором она передает приводное усилие.
Стартер двигателя в виде встроенного стартера-генератора 13 соединен с двигателем 10 с возможностью передачи приводного усилия, в этом случае он соединен с коленчатым валом двигателя 10 с помощью гибкого привода в виде приводного ремня или цепного привода 14. Стартер-генератор 13 соединен с источником электрической энергии в виде аккумулятора 15 и используется для запуска двигателя 10, при этом аккумулятор 15 заряжается от стартера-генератора, работающего в качестве генератора. Изобретение не ограничивается использованием стартера-генератора 13, а стартер-генератор 13 может быть заменен стартерным двигателем для запуска двигателя 10.
Следует понимать, что во время запуска двигателя 10 стартер-генератор 13 приводит в движение коленчатый вал двигателя 10, а в остальное время стартер-генератор приводится в действие двигателем 10 для выработки электрической энергии.
Управляемое водителем устройство включения/выключения в виде переключателя 17 зажигания, приводимого в действие ключом, используется для управления работой двигателя 10. Другими словами, во время работы двигателя 10 переключатель 17 зажигания находится во включенном положении, а когда переключатель 17 зажигания находится в выключенном положении, двигатель 10 не может работать. Переключатель 17 зажигания также имеет третье кратковременное положение, используемое для запуска двигателя 10 вручную. Следует понимать, что для выполнения данной функции могут использоваться и другие устройства, и что изобретение не ограничивается использованием переключателя зажигания.
Электронный блок 16 управления соединен со стартером-генератором 13, с двигателем 10, с датчиком 12 переключателя передач, используемым для контроля того, находится ли коробка передач 11 в нейтральном состоянии или состоянии включенной передачи, с датчиком 21 скорости, используемым для измерения скорости вращения ходового колеса 20, с датчиком 24 положения педали тормоза, используемым для контроля положения педали 23 тормоза, с системой определения положения педали сцепления, используемой для контроля положения педали 25 сцепления, и с датчиком 19 положения педали газа, используемым для контроля положения педали 18 газа. Педаль 18 газа передает входной сигнал от водителя, соответствующий запрашиваемой мощности двигателя 10. Если педаль 18 газа была перемещена из исходного положения, то говорят, что она находится в нажатом положении или нажатом состоянии. Следует понимать, что вместо контроля положения педали газа можно контролировать положение дроссельной заслонки и использовать его для определения положения педали газа.
Электронный блок 16 управления может выполнять функции самостоятельно или быть соединен с системой управления двигателем транспортного средства 5, способной определять количество топлива, подаваемого в двигатель 10, управлять выходным вращающим моментом двигателя 10 и работой двигателя 10 на холостом ходу через регулятор скорости холостого хода двигателя.
Хотя измерение скорости транспортного средства описано выше со ссылкой на использование датчика 21 ходового колеса, поскольку такие датчики в большинстве случаев уже установлены на транспортном средстве в качестве части антиблокировочной тормозной системы, следует понимать, что для определения скорости транспортного средства 5 можно использовать другие подходящие средства, например датчик, измеряющий скорость вращения вторичного вала коробки 11 передач.
Следует понимать, что термин «датчик переключателя передач» не ограничивается датчиком, который контролирует положение переключателя передач, вместо этого он может представлять собой устройство, которое может передавать сигнал обратной связи, сообщающий о том, что коробка 11 передач находится в состоянии включенной передачи или в нейтральном состоянии. Другими словами, он может представлять собой датчик нейтральной передачи или датчик включенной передачи.
Аналогичным образом, термин «датчик педали тормоза» не ограничивается датчиком, который контролирует положение педали тормоза, он также может представлять собой устройство, которое может передавать сигнал обратной связи, сообщающий о том, нажимает ли водитель транспортного средства 5 на педаль 23 тормоза для включения тормозов транспортного средства 5. Например, датчик педали тормоза может оценивать давление жидкости в одной или более тормозных магистралях. Если педаль 23 тормоза достаточно сильно нажата для включения тормозов, говорят, что она находится в нажатом состоянии или нажатом положении.
В этом случае система определения положения педали сцепления включает в себя датчик 26 главного цилиндра сцепления, используемого для контроля положения педали 25 сцепления путем определения положения поршня (не показан) главного гидравлического цилиндра 27 сцепления, и электронный процессор (EC3P) 16С положения педали сцепления, используемого для обработки сигнала положения от датчика 26 положения сцепления с целью генерирования выходного сигнала управления для электронного блока 16 управления, использующего логику, сохраненную в EC3P 16C. Однако следует понимать, что вместо контроля поршня главного тормозного цилиндра датчик положения может напрямую контролировать положение педали сцепления или несколько переключателей могут использоваться в качестве индикаторов положения педали сцепления.
Определение положения педали 25 сцепления как нажатого или отпущенного выполняется с помощью EC3P 16C, являющегося частью электронного блока 16 управления, используя сигнал о положении педали сцепления, полученного от датчика 26 положения. Сигнал положения сцепления обозначает текущее положение (СР) педали 25 сцепления.
Как показано на Фиг.1В, система привода сцепления образована в данном случае педалью 25 сцепления, главным гидравлическим цилиндром 27, исполнительным гидравлическим цилиндром 28 и рычагом 29 выключения сцепления, который включает и выключает сцепление 8 с помощью выжимного подшипника 9. Однако следует понимать, что для преобразования перемещения педали 25 сцепления во включенное или выключенное положение сцепления 8 могут быть использованы и другие средства, и что изобретение не ограничивается использованием гидравлической системы привода сцепления.
Также следует понимать, что электронный процессор (EC3P) 16C положения педали сцепления может представлять собой отдельное устройство и может не входить в состав главного электронного блока 16 управления запуском-остановкой.
Электронный блок 16 управления принимает несколько сигналов от двигателя 10, включая сигнал, позволяющий определить скорость вращения двигателя 10 от датчика скорости (не показан), и направляет двигателю сигналы, используемые для управления остановкой и запуском двигателя 10. В этом случае двигатель 10 представляет собой двигатель 10 с искровым зажиганием, а сигналы, направляемые электронным блоком 16 управления, используются для управления системой подачи топлива (не показана) двигателя 10 и системой зажигания (не показана) для двигателя 10. Если двигатель 10 был бы дизельным, то управлять нужно было бы только подачей топлива в двигатель. Электронный блок 16 управления состоит из различных компонентов, включая центральный процессорный блок, запоминающие устройства, таймеры и устройства обработки сигналов для преобразования сигналов от датчиков, подключенных к электронному блоку 16 управления, в данные, используемые электронным блоком 16 управления для управления работой, в частности, автоматической остановкой и запуском двигателя 10.
Во время нормальной работы двигателя электронный блок 16 управления, который в данном случае включает в себя систему управления двигателем и контроллер скорости холостого хода, может использоваться для управления количеством топлива, подаваемого в двигатель 10, и регулировки системы зажигания таким образом, чтобы зажигание подавалось в двигатель 10 от свечей зажигания в нужный момент для создания необходимого крутящего момента двигателя.
Электронный блок 16 управления управляет работой двигателя 10, который может работать в двух режимах: первый (автоматический) режим запуска-остановки и второй (непрерывный) режим. Однако следует понимать, что один или несколько отдельных электронных контроллеров могли бы использоваться для управления нормальной работой двигателя 10, а электронный контроллер 16 может только управлять переключением двигателя 10 между двумя режимами работы, а также автоматическим запуском и остановкой двигателя 10.
Электронный блок 16 управления также может быть использован для определения необходимости запуска двигателя 10 в первом режиме путем проверки одного или более рабочих параметров до выдачи разрешения на работу в первом режиме.
Данные рабочие параметры двигателя могут включать в себя температуру охлаждающей жидкости двигателя, ситуацию, когда ни один каталитический нейтрализатор, соединенный с двигателем, не нагрет, ситуацию, когда скорость вращения двигателя находится в установленных заранее пределах, уровень заряда аккумулятора транспортного средства 5 и текущее потребление энергии транспортным средством 5.
Например, если температура охлаждающей жидкости ниже 65°C, если каталитический нейтрализатор не нагрет или скорость вращения двигателя выше 1100 оборотов в минуту (RPM), то включение первого режима блокируется, а электронный блок 16 управления используется для включения двигателя 10 в режиме прогрева, в котором двигатель 10 работает непрерывно вне зависимости от того, движется ли транспортное средство 5 или нет.
Если будет определено, что условия работы двигателя соблюдены, старт-стопная система переходит в первый режим работы, когда выполняется одно или более заранее определенных условий остановки и запуска двигателя.
Эти условия остановки и запуска используются для систем остановки на включенной передаче (SIG), основанной на сигналах, полученных электронным блоком 16 управления от различных датчиков и систем.
Например, для остановки двигателя в режиме SIG необходимо учесть следующие факторы:
1/ равна ли нулю скорость транспортного средства, по информации от датчика 21 скорости транспортного средства;
2/ включена ли в данный момент передача, по информации от датчика 12 переключателя передач;
3/ не нажата ли педаль 18 газа, по информации от датчика 19 положения педали газа;
4/ нажата ли педаль 23 тормоза, по информации от датчика 24 положения педали тормоза;
5/ сделан ли вывод о том, что сцепление выключено;
и
6/ имеют ли место условия, препятствующие остановке двигателя, такие как высокое потребление энергии блоком кондиционирования воздуха, низкий уровень заряда аккумулятора и/или ошибка системы.
При соблюдении всех этих требований двигатель 10 будет остановлен, в противном случае он продолжит работу.
Для перезапуска двигателя 10 необходимо учесть следующие факторы:
1/ включена ли передача, по информации от датчика 12 переключателя передач;
2/ отпущена ли педаль 23 тормоза, по информации от датчика 24 положения педали тормоза;
3/ сделан ли вывод о том, что сцепление выключено в большей или такой же степени, как и при остановке двигателя 10;
4/ имеют ли место условия, препятствующие запуску двигателя, например, ошибки системы.
При соблюдении всех этих требований двигатель 10 будет запущен, в противном случае он останется остановленным.
Следует понимать, что условия запуска зависят от конфигурации транспортного средства, при этом в нем должны быть активированы пусковые сигналы для перезапуска. В описанном варианте воплощения в качестве пускового сигнала для перезапуска используется только положение педали тормоза, однако в других вариантах воплощения в качестве пускового сигнала для перезапуска может быть использовано положение педали газа, а еще в одном варианте воплощения в случае, если положение педали тормоза изменяется с нажатого на отпущенное или положение педали газа изменяется с отпущенного на нажатое, то одно из них также может быть использовано в качестве пускового сигнала для перезапуска.
На Фиг.2 показано три состояния педали сцепления: отпущенное (R), нажатое (P) и выжатое (D), а также граничные пороговые значения между состояниями. На сегодняшний день в системах запуска-останова обычно используются именно эти три состояния.
В зоне «R» педаль 25 сцепления считается отпущенной, другими словами, сцепление 8 включено, в зоне «D» педаль 25 сцепления считается полностью нажатой, при этом сцепление 8 выключено, а в зоне «P» педаль 25 сцепления считается нажатой, но сцепление 8 может быть выключено или включено в зависимости от места педали сцепления в зоне «P».
В данном примере граница между зоной нажатого положения «P» и зоной выжатого положения «D» соответствует перемещению педали сцепления примерно на 70%.
На Фиг.3A показан первый вариант воплощения способа оценки состояния сцепления, подходящего для системы SIG.
Способ начинается на этапе 105, который соответствует включению зажигания транспортного средства 5. Затем происходит переход на этап 110, на котором проверяется, находится ли транспортное средство в неподвижном состоянии, по информации от датчика 21 скорости транспортного средства. Если скорость транспортного средства не близка к нулю, то нельзя сделать вывод о том, что сцепление выключено, и способ переходит к этапу 140, результатом выполнения которого является выходной сигнал для контроллера 16 запуска-остановки, используемого для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190 для проверки, было ли выключено зажигание. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Если транспортное средство 5 неподвижно, способ переходит с этапа 110 к этапу 111, где определяется, включена ли передача. При этом используется сигнал от датчика 12 переключателя передач. Это условие необходимо потому, что, когда коробка 11 передач находится в нейтральном положении, крутящий момент, создающийся на сцеплении 8, будет равен нулю вне зависимости от положения педали сцепления. Следовательно, при невыполнении данного условия проверка выключенного состояния сцепления может привести к ошибочному выводу о том, что педаль сцепления прошла положение включения, хотя на самом деле этого не происходило.
Если передача не выбрана, состояние сцепления не может быть оценено как выключенное, а способ переходит с этапа 111 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, используемого для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190, где проверяется, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат к этапу 110, где запускается следующий цикл.
Если в текущий момент передача выбрана, то способ переходит от этапа 111 к этапу 112, где определяется, работает ли двигатель. Эта проверка необходима для того, чтобы убедиться в том, что двигатель 10 запущен, поскольку в противном случае будет невозможно оценить, выключено ли сцепление 8, используя вращающий момент сцепления. Это связано с тем, что при неподвижном двигателе 10 крутящий момент сцепления будет равен нулю вне зависимости от того, включено ли сцепление 8.
Следовательно, если двигатель не работает, состояние сцепления не может быть оценено как выключенное, способ переходит от этапа 112 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190, где проверяется, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Если на этапе 112 определено, что двигатель запущен, способ переходит от этапа 112 к этапу 113, где определяется, активен ли регулятор скорости холостого хода двигателя. Это условие используется для ограничения рассчитанного вращающего момента сцепления значением скорости холостого хода. Таким образом, можно предотвратить возникновение неустойчивой работы двигателя и замедление выключения подачи топлива, которые создают лишние сложности. Однако это условие не очень важно, его использование не стоит рассматривать как единственный способ реализации стратегии оценки выключения сцепления.
Однако если в данном случае регулятор скорости холостого хода двигателя будет не активен, состояние сцепления не может быть оценено как выключенное, способ переходит от этапа 113 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190, где проверяется, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Однако если на этапе 113 обнаружено, что регулятор скорости холостого хода двигателя активен, способ переходит от этапа 113 к этапу 114, где проверяется, близко ли к нулю значение вращающего момента сцепления к нулю. Крутящий момент сцепления основан на расчете, выполняемом в системе управления двигателем транспортного средства 5, сколько топлива впрыскивается в двигатель 10 для поддержания требуемого крутящего момента холостого хода с учетом электрической и механической нагрузок на двигатель 10.
Если значение крутящего момента сцепления не близко к нулю, состояние сцепления не может быть оценено как выключенное, способ переходит от этапа 114 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190, где проверяется, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Однако если на этапе 114 будет обнаружено, что крутящий момент сцепления практически равен нулю, то способ переходит от этапа 114 к этапу 118, где проверяется, истек ли период стабилизации, равный, например, одной секунде. Это условие включено в качестве защитной меры для обеспечения того, чтобы помехи сигнала или скачки сигнала случайно не привели к возникновению других условий, выполняемых по ошибке в течение небольшого времени. Периода стабилизации, равного одной секунде, обычно достаточно для компенсации возникновения таких условий.
Если период стабилизации не истек, состояние сцепления не может быть оценено как выключенное, способ переходит от этапа 118 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190, где проверяется, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Если на этапе 118 установлено, что необходимый период стабилизации истек, то способ переходит к этапу 120, где подтверждается, что был сделан вывод о выключенном состоянии сцепления 8, а результатом является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 120 к этапу 190 для проверки того, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Таким образом, способ обеспечивает удобный и недорогой путь индикации состояния сцепления 8, не требующий использования дорогой или сложной системы датчиков включения сцепления. Другими словами, не требуется большого количества дополнительного оборудования или связанных с ним издержек.
На Фиг.3B показан второй вариант воплощения способа определения состояния сцепления, подходящий для использования в системах SIG.
Способ во многом похож на описанный ранее способ, этапы с теми же номерами будут иметь то же назначение. Во втором варианте воплощения добавляются три новых условия, указанных на этапах 115, 166 и 177 между описанными ранее этапами 114 и 118 со ссылкой на первый вариант воплощения, показанный на Фиг.3А.
В данном случае если на этапе 114 определено, что вращающий момент двигателя по существу равен нулю, способ переходит от этапа 114 к этапу 115, где проверяется, полностью ли нажата педаль сцепления. Другими словами, выходной сигнал PSens от датчика положения педали сцепления, представленного в виде датчика 26 главного цилиндра сцепления, указывает на то, что педаль сцепления была нажата сильнее по сравнению с заранее заданным пороговым значением PThres.
Например, если пороговое значение PThres представляет собой уровень сигнала, равный 70% от перемещения педали 25 сцепления, то выполняется следующая проверка: PSens>PThres или PSens>70%. Если да, то педаль 25 сцепления полностью нажата, если нет, то это означает, что педаль 25 сцепления не нажата полностью.
Это условие необходимо для того, чтобы добавить еще один уровень защиты для предотвращения положительного вывода о выключенном сцеплении, когда имеется явно неверный сигнал PSens датчика CMC. Например, если сигнал положения PSens от датчика CMC указывает на то, что педаль 25 сцепления нажата только на 10%, а все остальные условия проверки сцепления указывают на подтверждение выключения сцепления, это позволяет предположить, что существует ошибка, связанная с сигналом PSens датчика CMC, либо неисправность или ошибка самой системы сцепления. При таких обстоятельствах проверки состояния сцепления, не должны делать вывод о выключенном сцеплении, чтобы двигатель не остановился.
Следовательно, если в данном случае датчик 26 определил, что педаль сцепления нажата не полностью, состояние сцепления не может быть оценено как выключенное, способ переходит от этапа 115 к этапу 140, где результат этапа 140 представляет собой выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10. Хотя на Фиг.3В не показано, водитель транспортного средства 5 может быть предупрежден при возникновении такого условия.
Затем способ переходит от этапа 140 к этапу 190 для проверки того, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Однако если обнаружено, что на этапе 115 педаль 25 сцепления полностью нажата, способ переходит к этапу 116 для определения того, полностью ли нажата педаль 23 тормоза.
На этапе 116 проверяется, указывает ли сигнал от датчика 24 положения педали тормоза на то, что педаль 23 тормоза полностью нажата. Если определено, что педаль тормоза полностью нажата, способ переходит к этапу 117 для определения состояния педали 18 газа. Это условие было добавлено в качестве дополнительной степени защиты для подтверждения того, что транспортное средство 5 фактически неподвижно. Точность сигнала скорости транспортного средства от датчика 21 скорости транспортного средства на низких скоростях не всегда достаточна для того, чтобы гарантировать, что транспортное средство 5 остановлено. Другими словами, оно добавлено в качестве дополнительной меры для обеспечения того, что транспортное средство 5 не двигается медленно на скорости холостого хода вниз по склону, что может привести к возникновению крутящего момента нейтральной передачи на сцеплении 8, когда на самом деле сцепление 8 включено. Скорость на холостом ходу должна быть ниже минимальной скорости транспортного средства, чтобы ее можно было определить с помощью датчика 21 скорости транспортного средства, учитывая то, что для выполнения всех условий на этапе 110 должна наблюдаться нулевая скорость транспортного средства.
Если на этапе 116 определено, что педаль 23 тормоза нажата не полностью, вывод о выключенном состоянии сцепления не может быть сделан, и способ переходит от этапа 116 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190 для проверки того, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
На этапе 117 проверяется, указывает ли сигнал от датчика 19 педали газа на то, что педаль 18 газа не нажата.
Если на этапе 117 согласно сигналам от датчика 19 положения педали газа определено, что педаль 18 газа не нажата, то способ переходит от этапа 117 к этапу 118. Это условие добавлено, потому что только оно эффективно помогает сделать вывод о выключенном состоянии сцепления при выполнении условий для последующего отключения двигателя. Если водитель транспортного средства запрашивает крутящий момент, например, если педаль 18 газа полностью нажата, то остановка в режиме SIG не будет инициирована.
Если на этапе 117 определено, что педаль 18 газа полностью нажата, состояние сцепления не должно быть оценено как выключенное, способ переходит от этапа 117 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190 для проверки того, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Если произошел переход способа от этапа 117 к этапу 118, то, как и ранее, выполняется проверка, не истек ли период стабилизации, например, равный одной секунде. Это условие, как и ранее, было включено в качестве защитной меры для обеспечения того, чтобы помехи или скачки сигнала случайно не вызвали другие условия, которые могут ошибочно выполняться в течение небольшого времени.
Как и ранее, если период стабилизации не истек, состояние сцепления не может быть оценено как выключенное, способ переходит от этапа 118 к этапу 140, результатом которого является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 140 к этапу 190 для проверки того, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Однако если на этапе 118 требуемый период стабилизации истек, то, как и ранее, способ переходит к этапу 120, где подтверждается, что состояние сцепления 8 оценено как выключенное, а результатом является выходной сигнал для контроллера 16 запуска-остановки, использующегося для управления работой двигателя 10.
Затем способ переходит от этапа 120 к этапу 190 для проверки того, произошло ли выключение зажигания. Если да, то на этапе 199 способ завершается, в противном случае происходит возврат на этап 110, где запускается следующий цикл.
Вышеописанный второй вариант воплощения также обеспечивает удобный и недорогой способ индикации состояния сцепления 8 без необходимости использования дорогостоящей или сложной системы датчиков включения сцепления, и он также является более надежным по сравнению с первым вариантом воплощения.
На Фиг.4 показан способ автоматической остановки и запуска двигателя в соответствии со вторым аспектом настоящего изобретения.
Способ начинается на этапе 210, где выполняют включение зажигания и запуск двигателя, во время которого включается двигатель 10. Затем способ переходит на этап 220 для проверки, движется ли транспортное средство 5. Если транспортное средство 5 движется, способ непрерывно выполняет этап 220 до тех пор, пока транспортное средство 5 не остановится или не будет выключено зажигание (не показано), после чего способ завершается.
Если транспортное средство 5 неподвижно, способ переходит на этап 230 для проверки, выполняются ли условия для выключения сцепления. Данные условия совпадают с условиями, указанными в описании для Фиг.3A и 3B. Другими словами, выходной сигнал, получаемый на этапе 120 или этапе 140, используется для определения того, получен ли ответ на вопрос, поставленный на этапе 230. Если выходной сигнал с этапа 140 сообщает о том, что условия не были выполнены, способ возвращается от этапа 230 к этапу 220, если же выходной сигнал от этапа 130 сообщает о том, что условия были выполнены, способ переходит от этапа 230 к этапу 240 для определения, соблюдены ли условия для остановки в режиме SIG.
Ниже приведен полный список условий для остановки в режиме SIG:
1/ равна ли скорость транспортного средства нулю, по информации от датчика 21 скорости транспортного средства;
2/ оценено ли состояние сцепления как выключенное;
3/ включена ли в данный момент передача, по информации от датчика 12 переключателя передач;
4/ не нажата ли педаль 18 газа, по информации от датчика 19 положения педали газа;
5/ нажата ли педаль 23 тормоза, по информации от датчика 24 положения педали тормоза;
6/ присутствуют ли условия, препятствующие остановке двигателя, такие как высокое потребление энергии блоком кондиционирования воздуха, низкий уровень заряда аккумулятора и/или ошибка системы.
Условия 1 и 2 уже были проверены на этапах 220 и 230, поэтому необходимо, чтобы на этапе 240 было выполнено следующее условие:
включена ли в данный момент передача, по информации от датчика 12 переключателя передач, и не нажата ли педаль 18 газа, по информации от датчика 19 положения педали газа, нажата ли педаль 23 тормоза, по информации от датчика 24 положения педали тормоза, а также нет ли условий, препятствующих остановке двигателя.
Если все части данной проверки выполнены, способ переходит к этапу 250 для остановки двигателя 10, в противном случае способ возвращается на этап 230.
От этапа 250 способ переходит к этапу 260, где определяется, выполняются ли условия запуска в режиме SIG.
Ниже приведен полный список условий для запуска в режиме SIG:
1/ включена ли в данный момент передача, по информации от датчика 12 переключателя передач;
2/ была ли отпущена педаль 23 тормоза, по информации от датчика 24 положения педали тормоза;
3/ определено ли, что сцепление выключено в большей или такой же степени, как и при остановке двигателя 10;
4/ нет условий, препятствующих запуску двигателя, например, ошибки системы.
Следовательно, если в данном случае в текущий момент передача включена, педаль 23 тормоза была отпущена, сцепление 8 выключено в большей или такой же степени, как и при остановке двигателя 10, а также нет условий, препятствующих запуску двигателя, то способ переходит на этап 270, где двигатель 10 перезапускается. В противном случае выполняется переход на этап 265 при остановленном двигателе, после чего происходит возврат на этап 260. Затем способ будет циклически выполнять этапы 260 и 265 до тех пор, пока на этапе 260 не будут выполнены все условия. Хотя это и не показано, в этом цикле способ может включать в себя предупреждение водителю о необходимости полного нажатия на педаль 25 сцепления.
Однако следует понимать, что условия запуска зависят от конфигурации транспортного средства, при этом в нем должны быть активированы пусковые сигналы для перезапуска. В описанном варианте воплощения в качестве пускового сигнала для перезапуска используется только положение педали тормоза, однако в других вариантах воплощения в качестве пускового сигнала для перезапуска может быть использовано положение педали газа, а еще в одном варианте воплощения в случае, если положение педали тормоза изменяется с нажатого на отпущенное или положение педали газа изменяется с отпущенного на нажатое, то одно из них также может быть использовано в качестве пускового сигнала для перезапуска.
От этапа 270 способ переходит к этапу 280 для проверки, произошло ли выключение зажигания, и если нет, то способ возвращается на этап 220 для повторения цикла. Если на этапе 280 происходит выключение зажигания, способ на этапе 290 завершается.
Хотя на Фиг.4 и не показано, между этапами 260 и 265 можно добавить еще один этап для того, чтобы подтвердить, может ли быть выполнен запуск на нейтральной передаче. Если такой вариант возможен, способ перейдет на этап 270, в противном случае он перейдет на этап 265.
Следовательно, используя вывод о состоянии сцепления, как было описано со ссылкой на первый аспект настоящего изобретения, можно получить надежную систему SIG, в которой существует более высокая вероятность автоматической остановки или запуска двигателя 10. Следует понимать, что помимо возможности использовать систему SIG в транспортном средстве 5, можно добавить традиционную систему SIN, тем самым также увеличивая количество возможных вариантов для остановки и запуска двигателя 10.
Специалистам в данной области техники понятно, что хотя описание было приведено на примере со ссылкой на один или несколько вариантов воплощения, оно не ограничивается раскрытыми вариантами воплощения, и что без отхода от сущности настоящего изобретения могут быть получены альтернативные варианты воплощения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ВКЛЮЧЕНИЯ СЦЕПЛЕНИЯ | 2013 |
|
RU2658238C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ СО СТАРТЕРНЫМ МОТОРОМ | 2014 |
|
RU2684155C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТ-СТОПНОЙ СИСТЕМОЙ ДВИГАТЕЛЯ | 2012 |
|
RU2604831C2 |
| Способ (варианты) и система для запуска двигателя | 2014 |
|
RU2655427C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ СО СТАРТ-СТОПНОЙ СИСТЕМОЙ | 2014 |
|
RU2656538C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2614522C2 |
| СПОСОБ ЗАПУСКА И ОСТАНОВКИ ДВИГАТЕЛЯ И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2606523C2 |
| СПОСОБ УПРАВЛЕНИЯ ОСТАНОВОМ И ПУСКОМ ДВИГАТЕЛЯ И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2707180C2 |
| СПОСОБ УПРАВЛЕНИЯ ГЛУШЕНИЕМ ДВИГАТЕЛЯ НА ХОЛОСТОМ ХОДУ И УСТРОЙСТВО УПРАВЛЕНИЯ ГЛУШЕНИЕМ ДВИГАТЕЛЯ НА ХОЛОСТОМ ХОДУ | 2015 |
|
RU2700317C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2624481C2 |
Группа изобретений относится к области транспортного машиностроения. Способ оценки состояния сцепления содержит этапы, на которых делают вывод о том, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель работает и передаваемый через сцепление крутящий момент, по существу, равен нулю. В противном случае делают вывод, что выключенное состояние сцепления не подтверждено. Способ выполнения автоматической остановки двигателя транспортного средства содержит этапы, на которых оценивают состояние сцепления с использованием упомянутого способа и выполняют остановку двигателя. Транспортное средство имеет двигатель, соединенный с механической коробкой передач с возможностью передачи приводного усилия через сцепление, и электронный контроллер, запрограммированный на оценку рабочего состояния сцепления. Электронный контроллер определяет состояние сцепления. Достигается повышение надежности и безопасности транспортного средства. 3 н. и 11 з.п. ф-лы, 6 ил.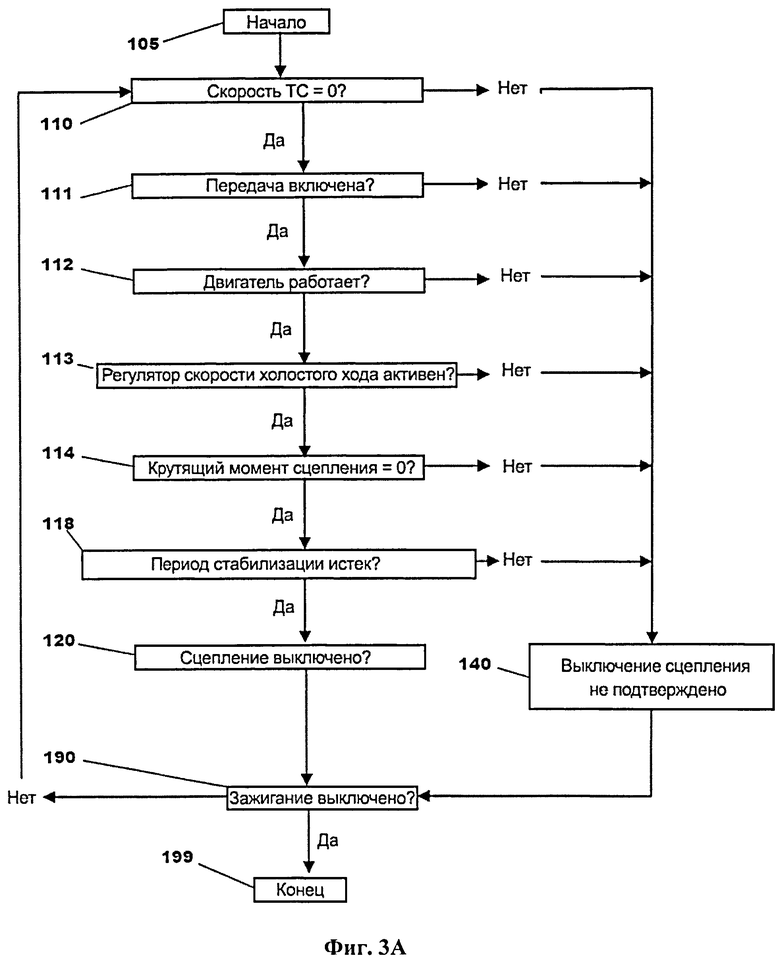
1. Способ оценки состояния сцепления, соединяющего двигатель транспортного средства с многоступенчатой механической коробкой передач с возможностью передачи приводного усилия, в котором делают вывод о том, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель работает и передаваемый через сцепление крутящий момент, по существу, равен нулю, а в противном случае делают вывод, что выключенное состояние сцепления не подтверждено.
2. Способ по п.1, в котором также делают вывод о том, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель включен, передаваемый через сцепление крутящий момент, по существу, равен нулю и активен регулятор скорости холостого хода двигателя, а в противном случае делают вывод, что выключенное состояние сцепления не подтверждено.
3. Способ по п.1, в котором также делают вывод о том, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель включен, передаваемый через сцепление крутящий момент, по существу, равен нулю и период стабилизации истек, а в противном случае делают вывод, что выключенное состояние сцепления не подтверждено.
4. Способ по п.1, в котором также делают вывод о том, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель работает, передаваемый через сцепление крутящий момент, по существу, равен нулю и полностью нажата педаль сцепления, а в противном случае делают вывод о том, что выключенное состояние сцепления не подтверждено.
5. Способ по п.1, в котором также делают вывод о том, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель работает, передаваемый через сцепление крутящий момент, по существу, равен нулю и педаль тормоза полностью нажата, а в противном случае делают вывод о том, что выключенное состояние сцепления не подтверждено.
6. Способ по п.1, в котором также делают вывод о том, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель работает, передаваемый через сцепление крутящий момент, по существу, равен нулю и педаль газа нажата не полностью, а в противном случае делают вывод о том, что выключенное состояние сцепления не подтверждено.
7. Способ выполнения автоматической остановки двигателя транспортного средства при включенной передаче механической коробки передач, соединенной с двигателем с возможностью передачи приводного усилия через сцепление, в котором оценивают состояние сцепления с использованием способа по любому из пп. 1-6 и выполняют остановку двигателя, если определено, что сцепление выключено и выполнено одно или более дополнительных условий для остановки двигателя.
8. Способ по п.7, в котором одно из дополнительных условий для остановки двигателя представляет собой, по существу, нулевую скорость транспортного средства.
9. Способ по п.7, в котором одно из дополнительных условий для остановки двигателя представляет собой ненажатую педаль газа.
10. Способ по п.7, в котором одно из дополнительных условий для остановки двигателя представляет собой нажатую педаль тормоза.
11. Способ по п.7, в котором одно из дополнительных условий для остановки двигателя представляет собой отсутствие условий, препятствующих остановке двигателя.
12. Транспортное средство, имеющее двигатель, соединенный с механической коробкой передач с возможностью передачи приводного усилия через сцепление, и электронный контроллер, запрограммированный на оценку рабочего состояния сцепления, где электронный контроллер выполнен с возможностью определять, что сцепление выключено, если скорость транспортного средства, по существу, равна нулю, включена передача коробки передач транспортного средства, двигатель работает и передаваемый через сцепление крутящий момент, по существу, равен нулю, а в противном случае устанавливать, что выключенное состояние сцепления не подтверждено.
13. Транспортное средство по п.12, в котором электронный контроллер выполнен с возможностью автоматически останавливать двигатель, если было определено, что сцепление выключено и выполнено одно или более дополнительных условий для остановки двигателя.
14. Транспортное средство по п.13, в котором одно или более дополнительных условий для остановки двигателя представляет собой следующее условие: по существу, нулевую скорость транспортного средства, ненажатую педаль газа транспортного средства, нажатую педаль тормоза транспортного средства, отсутствие условий, препятствующих остановке двигателя.
| СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ ГОЛОСОВАНИЯ | 2006 |
|
RU2413999C2 |
| EP 1950461 A2, 30.07.2008 | |||
| АВТОМОБИЛЬ | 1998 |
|
RU2202480C2 |

