Изобретение относится к области измерительной техники и может быть использовано для определения расхода электропроводящих жидких сред.
Известна конструкция электромагнитного расходомера. Электромагнитный расходомер базируется на измерении разности электрических потенциалов, образующихся на электродах, контактирующих с потоком движущейся жидкости, расположенных перпендикулярно как к линиям магнитного поля, так и к направлению движения потока жидкости. Электромагнитный расходомер содержит первичный преобразователь (датчик) расход а жидкости, магнитную систему с катушками, в зазоре которой установлен трубопровод с электродами, предварительный усилитель, формирователь тока, аналогово-цифровой преобразователь (АЦП), микроконтроллер, жидкокристаллический индикатор и источник опорного напряжения. Выходы формирователя тока соединены со входом первичного преобразователя расхода, то есть катушками магнитной системы. Выходы первичного преобразователя расхода, то есть электроды соединены со входом предварительного усилителя, выход которого соединен с первым входом АЦП. Выход АЦП соединен со входом микроконтроллера, первый выход которого соединен со входом индикатора. Электромагнитный расходомер (ЭМР) включает формирователь модулирующего сигнала и модулятор опорного напряжения. Выход источника опорного напряжения соединен с первым входом модулятора опорного напряжения, второй вход которого соединен с выходом формирователя модулирующего сигнала, вход которого соединен со вторым выходом микроконтроллера. Выход модулятора опорного напряжения соединен со входом формирователя тока и со вторым входом АЦП.
Такое техническое решение позволяет для измерения расхода с помощью ЭМР и может быть использовано в счетчиках с трубопроводами диаметром намного больше 300 мм воды, кислот, щелочей, молока, пива (патент РФ №2489684, G01F/58 «Электромагнитный расходомер» 2013, авторы: В.К. Недзвецкий, В.Б. Рогозин).
Недостатки этого устройства заключаются в том, что конструкция таких ЭМР довольно громоздка и сложна, поскольку предусматривает необходимость погружения чувствительных элементов погружных датчиков локальной скорости на разную глубину, в зависимости от диаметра трубопровода. Кроме того, штанги, на которых укрепляется чувствительные элементы (ЧЭ) погружных датчиков локальной скорости электромагнитных расходомеров, могут иметь значительную длину и достаточно большой поперечный размер для сохранения прочности и предотвращения вибрации. Поэтому использование такого датчика в потоке теплоносителя внесет искажения профиля скорости и дополнительное гидросопротивление.
Известен способ измерения расхода жидкости на испытательном расходомерном устройстве (ИРУ). На испытательный участок трубопровода монтируют первичные преобразователи (датчики) испытуемых расходомеров и обеспечивают «нормальной» кинематической структурой потока на из выходе. Испытания расходомеров с различными условными диаметрами Ду обеспечиваются комплектом сменных испытательных трубопроводов или устройством коллектора параллельных стационарных трубопроводов, имеющих на входе и выходе автономные запорные органы. «Нормальная» то есть соответствующая развитому турбулентному течению, симметричная структура потока со строго ограниченной радиальной составляющей скорости (с ограниченной закруткой потока). Применяются пассивные и активные способы индикации границ интервала осреднения расхода. Активный способ заключается в принудительном изменении направления потока на выходе из магистрали. При пассивном способе воздействие на поток отсутствует. Для измерения длительности интервала обычно используются интеграторы времени с фиксированными началом и концом отсчета времени. Общность процесса создания и измерения расхода и обусловленная ею общность структуры и ИРУ позволяют описать указанный процесс тремя основными уравнениями
- уравнение аппроксимации
где Qy - модель расхода; Qy(t) - расход жидкости через испытуемый расходомер в функции времени t, индекс y - эквивалент массы М жидкости при изменении массового расхода QM или объема V при изменении объемного расхода QV;
- уравнением измерений
где Qyu - измеренный расход; Y(t) - количество жидкости, поступающей в измерительный резервуар; Y∑ - количество жидкости, поступившей в измерительный резервуар;
- уравнением баланса расходов или потерь на участке «испытуемый расходомер - измерительный резервуар»
где Ynomi - потери жидкости; i - номер источника потерь = 1, 2, 3, n.
Такое решение позволяет измерить расход теплоносителя или протекающей жидкости в статическом и динамическом нагружении. В предложенной классификации (динамической и статической нагрузки) основными классификационными признаками служат способ получения информации о результатах измерения и метод измерения количества протекающей жидкости. По первому признаку ИРУ подразделяются на статические и динамические, по второму - на объемные и весовые (Б.В. Бирюков, М.А. Данилов, С.С. Кивилис. «Испытательные расходомерные установки». Энергия, Москва, 1976, 144 с.; стр. 5-11. 1. Структура и основные уравнения ИРУ»).
Недостаток способа измерения протекающей жидкости совпадает с недостатками устройства выбранного аналога. Кроме этих недостатков способ не позволяет измерить расход жидкостей в трубопроводах больших диаметров от 300 мм и больше.
Наиболее близким техническим решением к предлагаемому изобретению является устройство, содержащее три блока измерителя скорости (ИС-1, 2, 3) в состав каждого блока измерительной системы входит: по одному первичному преобразователю скорости ЭМР, измерительный блок, то есть блок согласования выходов ЭМР с внешней цепью, (который не раскрыт) содержит предварительный усилитель, переключатель, АЦП, микроконтроллер, многоканальные и автономный блоки питания постоянного тока, один вычислительный блок для трех измерителей скорости (также не раскрыт), содержит: микропроцессор, блок памяти, индикатор, кнопочную четырехклавишную клавиатуру, автономный блок питания постоянного тока, мерный трубопровод с условным диаметром от Ду 200 мм и больше. Все три преобразователя скорости симметрично смонтированы (закреплены) на мерный трубопровод, выход преобразователя скорости соединен со входом измерительных блоков, выход последних блоков соединен с вычислительным блоком типа ИВБ-1П. Вторые выходы измерительного блока подсоединены к другим преобразователям скорости. В состав измерителя расхода входит: чувствительный элемент с двумя электродами, державка, разъем и эта совокупность называется «преобразователь скорости». В состав измерительного блока входит стойка, преобразователь скорости, шлюзовая камера ШК-1 с шаровым краном. Их совокупность называется «модуль первичного преобразователя локальной скорости».
Такое устройство позволяет измерить скорости и расходы теплоносителя в трубопроводах больших диаметров на основе метода измерения расхода «площадь-скорость».
Основным недостатком известного устройства для измерения расхода теплоносителя в трубопроводах больших диаметров являются: не учитывается искажение исходного профиля скорости конструктивными элементами погружных датчиков локальной скорости, погруженными в поток контролируемой жидкости (Материалы 16 Международной научно-практической конференции «Коммерческий учет энергоносителей», сост. В.И. Лачков, СПб, Политехника, 2002 г., стр. 397-400, Авторы: Шинелев А.А., Бурдунин М.Н., Вельт И.Д.).
Наиболее близким к предлагаемому изобретению техническим решением является способ, основанный на применении погружных электромагнитных преобразователей локальной скорости, по которому расход вычисляют методом «площадь-скорость». Метод измерения «площадь-скорость» основан на измерении локальной (местной) скорости. По данному методу измеряют локальную скорость v в одной или нескольких точках поперечного сечения трубопровода, измеряют площадь сечения S в мерном участке трубопровода, вычисляют среднюю по сечению скорость контролируемой электропроводящей жидкости (теплоносителя) u и определяют объемный расход G согласно выражению:  где N - число измерителей локальной скорости; αi - нормированные коэффициенты скорости, vi - значения локальной скорости в измерительных точках. Предлагают простой алгоритм вычисления, когда αi равной между собой. При этом выходная величина расхода пропорциональна среднему значению показаний каждого измерителя скорости. Представляют профиль скорости в трубопроводе с круглым сечением в виде разложения по гармоникам Фурье по углу поворота θ, вокруг оси трубопровода. Используют тот факт, что при усреднении локальных скоростей, измеренных в любых трех точках, расположенных в поперечном сечении равномерно по окружности с центром, совпадающим с осью трубы, остаются только гармоники, кратные 6. Предлагают для уменьшения погрешности, обусловленной асимметрией профиля скорости потока число измерителей локальной скорости N выбирают кратной 3, а электромагнитные преобразователи скорости устанавливают равномерно по окружности, опоясывающей измерительное сечение. Калибровку и поверку теплосчетчиков и расходомеров осуществляют проливным или имитационным способами. При проливном способе калибровки и поверки на проливной установке УРОКС-400 мерный участок состоит из трех отрезков трубопроводов Ду 204 мм с присоединительными фланцами. Для имитационной поверки предлагают новый метод, основанный на определении комплексного коэффициента преобразования измерителя скорости. Показывают, что коэффициент преобразования характеризует отношение сигнала на электродах первичного преобразователя (датчика) при скорости 1 м/с к току или напряжению питания индуктора. Метод реализован в установке Поток-Т.
где N - число измерителей локальной скорости; αi - нормированные коэффициенты скорости, vi - значения локальной скорости в измерительных точках. Предлагают простой алгоритм вычисления, когда αi равной между собой. При этом выходная величина расхода пропорциональна среднему значению показаний каждого измерителя скорости. Представляют профиль скорости в трубопроводе с круглым сечением в виде разложения по гармоникам Фурье по углу поворота θ, вокруг оси трубопровода. Используют тот факт, что при усреднении локальных скоростей, измеренных в любых трех точках, расположенных в поперечном сечении равномерно по окружности с центром, совпадающим с осью трубы, остаются только гармоники, кратные 6. Предлагают для уменьшения погрешности, обусловленной асимметрией профиля скорости потока число измерителей локальной скорости N выбирают кратной 3, а электромагнитные преобразователи скорости устанавливают равномерно по окружности, опоясывающей измерительное сечение. Калибровку и поверку теплосчетчиков и расходомеров осуществляют проливным или имитационным способами. При проливном способе калибровки и поверки на проливной установке УРОКС-400 мерный участок состоит из трех отрезков трубопроводов Ду 204 мм с присоединительными фланцами. Для имитационной поверки предлагают новый метод, основанный на определении комплексного коэффициента преобразования измерителя скорости. Показывают, что коэффициент преобразования характеризует отношение сигнала на электродах первичного преобразователя (датчика) при скорости 1 м/с к току или напряжению питания индуктора. Метод реализован в установке Поток-Т.
Такое решение обеспечивает измерение средней скорости и расхода теплоносителя в трубопроводах больших диаметров на основе метода измерения расхода «площадь-скорость» (электромагнитные теплосчетчики КМ-5-Б3 и счетчики-расходомеры КМ-5-Б3 погружного типа для коммерческого учета тепла и теплоносителя в трубопроводах больших диаметров» (Материалы 16 Международной научно-практической конференции «Коммерческий учет энергоносителей», сост. В.И. Лачков, СПб, Политехника, 2002 г., стр. 397-400, Авторы: Шинелев А.А., Бурдунин М.Н., Вельт И.Д.).
Основным недостатком известного способа для измерения расхода теплоносителя в трубопроводах больших диаметров является то, что при измерении локальной скорости не в точках 0.242R (где R - внутренний радиус трубопровода) замена коэффициента скорости α невозмущенного потока теплоносителя на табличную константу αтаб приведет к увеличению погрешности измерения средней скорости и расхода контролируемой жидкости. Кроме того, недостатком является отсутствие в устройстве защиты от влияния внешних электромагнитных и синфазных помех через блоки питания.
Задачей настоящего изобретения является повышение точности измерений расхода электропроводящей жидкости в трубопроводах больших диаметров, экономия потребляемой устройством электроэнергии, улучшение помехоустойчивости. Благодаря указанным свойствам расширяется область применения. Поставленные цели достигаются путем составления оптимального алгоритма и программы вычисления расхода теплоносителя.
1. Технический результат достигается тем, что в устройстве для определения расхода в трубопроводах больших диаметров, содержащем мерный трубопровод, включающий три измерителя локальной скорости, каждый из которых состоит из преобразователя первичных сигналов и подсоединенного к нему погружного датчика локальной скорости, включающего магнитную систему с катушками, погружная часть которого содержит чувствительный элемент с электродами, и погруженного в трубопровод полностью заполненный электропроводящей жидкостью, многоканальный блок питания постоянного тока, автономный блок питания постоянного тока, три преобразователя первичных сигналов на основе электромагнитных расходомеров, которые содержат предварительный усилитель, переключатель, аналого-цифровой преобразователь, микроконтроллер, вычислительный блок, который содержит микропроцессор, блок памяти и индикатор, при этом выход электродов через предварительный усилитель, переключатель, аналого-цифровой преобразователь подсоединен ко входу микроконтроллера, а выходы микроконтроллеров соединены с входом микропроцессора вычислительного блока, выход микропроцессора соединен с блоком памяти и индикатором, выход, то есть положительный полюс автономного блока питания постоянного тока соединен со схемами питания микропроцессора, блока памяти, индикатора в точках д, е, ж, з, один из выходов, то есть положительный полюс многоканального блока питания соединен с цепями питания предварительного усилителя, переключателя, аналого-цифрового преобразователя, микроконтроллера в точках а, б, в, г, управляющий выход f микроконтроллера подсоединен к переключателю с целью выдачи на него управляющих команд f1, f2 управляющий выход е микроконтроллера подсоединен к аналого-цифровому преобразователю, управляющий выход р микропроцессора соединен с соответствующими управляющими входами р микропроцессоров преобразователей первичных сигналов;
в нем дополнительно введены формирователь тока, включающий ключи К1, К2 с переключателем; датчик тока на основе опорного прецизионного резистора и пассивного фильтра на чип-резисторах, входящий в состав преобразователей первичных сигналов и включающий опорный резистор Rоп; кнопочная четырехклавишная клавиатура; причем в составленной программе использованы значения информационного разностного сигнала Ci и эталонной локальной скорости vэ для кусочно-линейной аппроксимации номинальной статической характеристики измерителя локальной скорости, количество отрезков аппроксимации номинальной статической характеристики задан не менее трех, чувствительные элементы погружных датчиков локальной скорости в режиме измерений погружен внутрь трубопровода полностью заполненного электропроводящей жидкостью на глубину h1,2,3, измерен внутренний диаметр трубопровода D, диаметры d погружных чувствительных элементов датчиков локальной скорости, расстояния от внутренней стенки трубопровода до измерительных точек Y1-3, его величина состоит из суммы Y1-3=h1-3+Xeff, где Xeff - расстояние от торца погружных датчиков локальной скорости до измерительной точки, для погружных датчиков локальной скорости, Xeff=2 мм, эти геометрические параметры хранят в памяти вычислительного блока;
причем выходы катушек погружных датчиков локальной скорости подсоединены через формирователи тока, датчики тока к выходам, то есть положительным полюсам многоканального блока питания катушек, запитаного от промышленной сети переменного напряжения; выход, то есть отрицательный полюс многоканального блока питания катушек соединен с отрицательным полюсом устройства в точке Б, другой выход многоканального блока питания через датчик тока на основе опорного прецизионного резистора и пассивного фильтра на чип-резисторах, формирователь тока, подсоединен ко входу катушки, управляющие выходы микроконтроллера g1 и g2 подсоединены к ключам К1 и К2 формирователя тока, причем выход датчика тока подсоединен к входу переключателя; причем защищают цепь электродов и входную цепь предварительного усилителя от проникновения внешних электромагнитных помех, от синфазных помех и земляных токов устройства, для этого общую шину устройства в точке Б электрически изолируют от местного защитного заземления в точке В, при этом защитные корпуса первичных преобразователей сигналов в точке В соединены с местным защитным заземлением в точке з;
причем отрицательные полюсы раздельного многоканального и автономного блоков питания постоянного тока соединены с отрицательным полюсом общей шины питания устройства в точке Б, причем отрицательный полюс общей шины питания устройства в точке Б электрически изолирован от местного защитного заземления в точке В, защитные корпуса преобразователей первичных сигналов в точке В соединены с местным защитным заземлением в точке з; причем микропроцессор взаимодействует с микроконтроллерами трех первичных преобразователей сигналов путем их опроса и подачи команд управления, а оператор подает команды микропроцессору через кнопочную четырехклавишную клавиатуру, считывает информацию с индикатора и запоминает в блоке памяти вычислительного блока
2. Технический результат также достигается тем, что в способе для определения расхода в трубопроводах больших диаметров, в котором измерители локальной скорости устройства калибруют проливным способом при полностью заполненном электропроводящей жидкостью мерном участке проливного стенда, среднюю скорость u контролируемой жидкости в мерном участке трубопровода вычисляют согласно выражению:  где N - число измерителей локальной скорости; αi - нормированные коэффициенты скорости, vi - значения локальной скорости в измерительных точках; величину расхода контролируемой жидкости вычисляют как произведение средней скорости на площадь измерительного сечения: Gv=u⋅S, площадь измерительного сечения рассчитывают по формуле: S=πD2/4-SM; где Sм - суммарная площадь миделей датчиков локальной скорости:
где N - число измерителей локальной скорости; αi - нормированные коэффициенты скорости, vi - значения локальной скорости в измерительных точках; величину расхода контролируемой жидкости вычисляют как произведение средней скорости на площадь измерительного сечения: Gv=u⋅S, площадь измерительного сечения рассчитывают по формуле: S=πD2/4-SM; где Sм - суммарная площадь миделей датчиков локальной скорости:  где d - диаметр датчика скорости; hi - глубина погружения i-го датчика локальной скорости, i=1, 2, 3;
где d - диаметр датчика скорости; hi - глубина погружения i-го датчика локальной скорости, i=1, 2, 3;
в нем дополнительно в режиме калибровки измерителей локальной скорости определяют номинальную статическую характеристику, задают на проливном стенде в мерном участке ряд значений эталонных локальных скоростей vэ в измерительной точке погружного датчика локальной скорости; для каждого значения локальной скорости vэ измеряют значение информационного разностного сигнала Ci измерителя локальной скорости, причем значения эталонной локальной скорости vэ изменяют в диапазоне (0.2, …, 5) м/с, кроме того измеряют значение информационного разностного сигнала Ci при нулевой скорости контролируемой электропроводящей жидкости в трубопроводе, полученные значения разностного сигнала Ci и эталонной скорости vэ запоминают и сохраняют в памяти микроконтроллера преобразователя первичных сигналов в автоматическом режиме согласно составленному алгоритму и программе;
во время измерительного цикла Т в течение интервалов времени t1, t2, t3, t4 в микроконтроллере задают уровни логических управляющих сигналов: в интервал времени t1 - логические управляющие сигналы g1=1, g2=0; в интервал времени t2 - логические управляющий сигналы g1=0, g2=0; в интервал времени t3 - логические управляющие сигналы g1=0, g2=1; в интервал времени t4 - логические управляющие сигналы g1=0, g2=0; при этих условиях соответственно микроконтроллер формирует логические управляющие сигналы g1, g2, в формирователе тока формируют положительный полупериод меандра тока катушки I+ в интервал времени логического управляющего сигнала g1 длительностью Tg1, с электродов снимают информационный сигнал U±v, пропорциональный локальной скорости контролируемой жидкости v, подают его на вход предварительного усилителя, и на выходе имеют согласованный и усиленный информационный сигнал kU±v, затем оцифровывают данный сигнал и получают на выходе аналогово-цифрового преобразователя оцифрованный информационный сигнал kU'±v, пропорциональный локальной скорости v, по истечении времени паузы Т0=t2 формируют отрицательный полупериод меандра тока катушки I- в интервал времени логического управляющего сигнала g2 длительностью Tg2, причем задние фронты управляющего логического сигнала g2, отрицательного полупериода меандра тока катушки I- и информационного сигнала U-v сдвинуты относительно передних фронтов управляющего логического сигнала g1, положительного полупериода меандра тока катушки I+ и информационного сигнала U+v на время паузы Т0=t4=t2, при этом в интервалы времени t1 и t3 формируют положительные и отрицательные полупериоды меандра тока через катушку и оцифровывают усиленный и согласованный информационный сигнал kU±v и сигнал тока через катушку UI, пропорциональный току в этой цепи, снимаемый с опорного резистора Rоп датчика тока, причем информационный сигнал kU±v оцифровывают в интервал времени Т1 после завершения интервала времени переходного процесса Тс, затем оцифровывают сигнал пропорциональный току через катушку UI в интервал времени Т2, зарезервированном микроконтроллером для измерения тока через катушку, в интервалы времени формирования положительного и отрицательного полупериода меандра тока через катушку t1 и t3 микроконтроллер соответственно подает управляющую команду f2 на переключатель, при этом с выхода предварительного усилителя на вход аналогово-цифрового преобразователя подают информационный сигнал kU±v, затем микроконтроллер подает управляющую команду е оцифровать неоднократно n раз, с равномерным или неравномерным шагом, на аналогово-цифровой преобразователь, n значений оцифрованного сигнала kU'±v запоминают в оперативной памяти микроконтроллера для дальнейшей обработки, затем микроконтроллер подает на переключатель управляющую команду f1, при этом с выхода датчика тока на вход АЦП подают сигнал датчика тока UI и на его выходе имеют оцифрованный сигнал датчика тока через катушку U'I, затем микроконтроллер подает управляющий сигнал - команду е оцифровать на АЦП, оцифрованный сигнал датчика тока через катушку U'I подают на вход микроконтроллера и запоминают в его оперативной памяти для дальнейшей обработки,
также уменьшают случайную составляющую относительной погрешности измерения локальной скорости: n значений оцифрованного информационного сигнала kU'±v,j, где j=1, 2…n, получают в интервалы времени тока через катушку положительной полярности t1 и отрицательной полярности t3 и запоминают их в оперативной памяти микроконтроллера, обрабатывают согласно заранее составленной методике, реализованной в программе для микроконтроллера при этом используют метод усреднения с исключением выбросов, по которому отбрасывают максимальное и минимальное значение оцифрованного информационного сигнала kU'±v,j, оставшиеся n-2 значения этого сигнала усредняют, запоминают в оперативной памяти микроконтроллера и используют в дальнейших вычислениях,
также устраняют влияние нестабильности информационного сигнала U±v, связанное с нестабильностью тока питания катушек и одновременно устраняют сигнал смещения U0, обусловленный протеканием на электродах побочных электрохимических процессов, в автоматическом режиме согласно составленному алгоритму и программе для микроконтроллера определяют значения информационного разностного сигнала Ci как:
Ci=С+-С-=kU+/UI+-kU-/UI-=(U+/I+-U-/I-)⋅k/Rоп,
где U+ и U- - суммарный сигнал соответственно положительной и отрицательной полярности, снимаемый с электродов погружного датчика локальной скорости в различные интервалы времени измерительного цикла Тизм;
U+=U0+Uv в интервал времени формирования положительного полупериода меандра тока через катушку t1 - когда логические управляющие сигналы g1=1, g2=0 и через катушку течет ток положительной полярности;
U-=U0-Uv в интервал времени формирования отрицательного полупериода меандра тока через катушку t3 - когда логические управляющие сигналы g1=0, g2=1 и через катушку течет ток отрицательной полярности;
U0 - суммарный сигнал в интервалы времени паузы t2 и t4, когда логические управляющие сигналы g1=0, g2=0 и ток через катушку отсутствует, при этом многоканальный блок питания в цепи катушки не потребляет электроэнергию из промышленной сети, то есть получают экономию.
определенные в микроконтроллере значения информационного разностного сигнала Ci, запоминают в его оперативной памяти до поступления новых значений Ci в следующих циклах измерений,
также измеряют значения локальной скорости v по измеренным значениям информационного разностного сигнала Ci, при этом используют номинальную статическую характеристику измерителя локальной скорости, полученную при его калибровке, запоминают и сохраненную в памяти микроконтроллера,
результаты измерений локальной скорости v контролируемой жидкости в преобразователях первичных сигналов сохраняют в оперативной памяти микроконтроллеров в течение времени измерительного цикла Тизм=Tg1+Т0=Tg2+Т0 до поступления новых измерений в следующем измерительном цикле Тизм, при этом старые измерения заменяются новыми, то есть наступает следующий измерительный цикл,
затем микропроцессор автономно, независимо от работы преобразователей первичных сигналов, в автоматическом режиме согласно составленному алгоритму и программе считывает ежесекундно из памяти микроконтроллеров текущие измеренные значения локальных скоростей v1, v2 и v3 в измерительных точках i1,2,3 погружных датчиков локальной скорости.
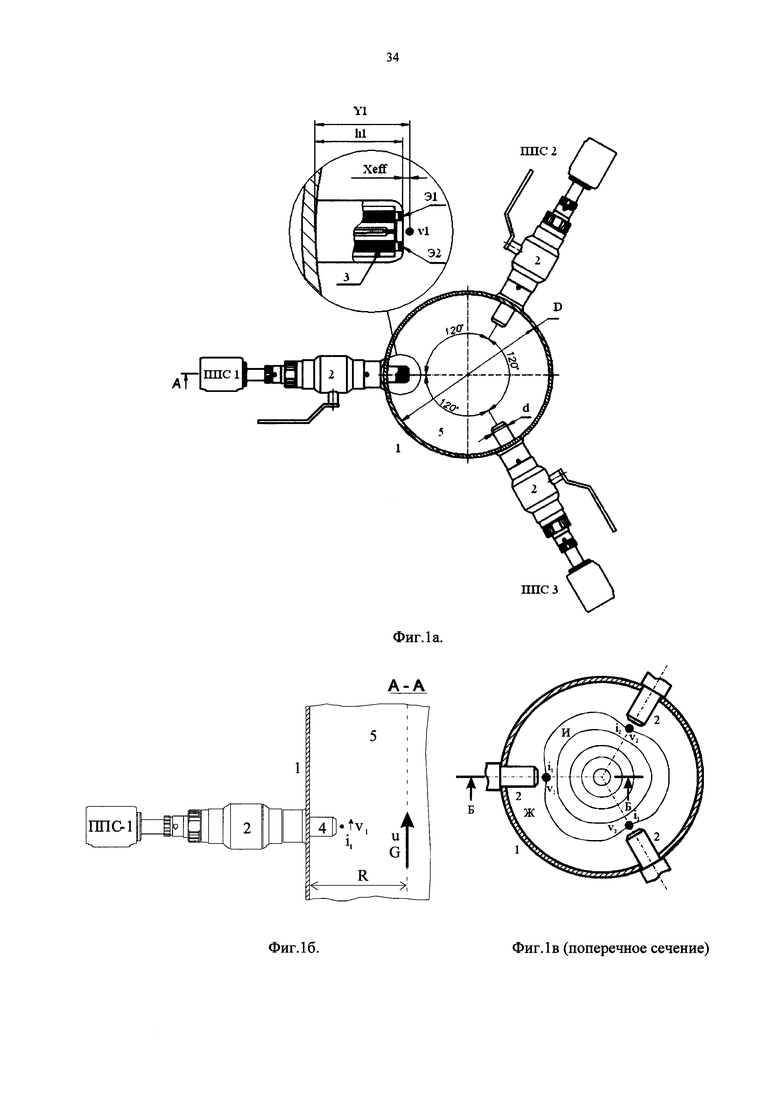
На фиг. 1а показан состав и расположение блоков (приборов) на поперечном сечении трубопровода.
На фиг. 1б показан состав и расположение блоков на продольном сечении трубопровода.
На фиг. 1в показаны измерительные точки погружных датчиков локальной скорости (ПДЛС).
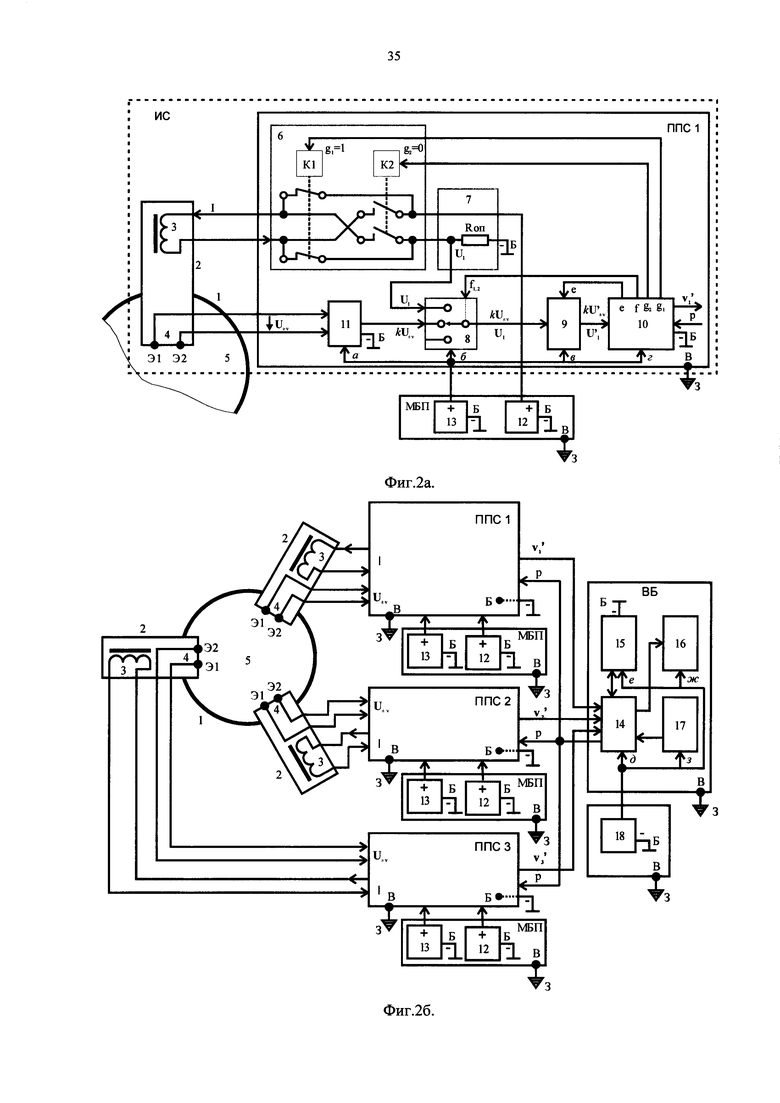
На фиг. 2а показана упрощенная блок-схема преобразователя первичных сигналов ППС-1, 2, 3 и измерителя локальной скорости (ИС).
На фиг. 2б показана блок-схема устройства для измерения расхода жидкости.
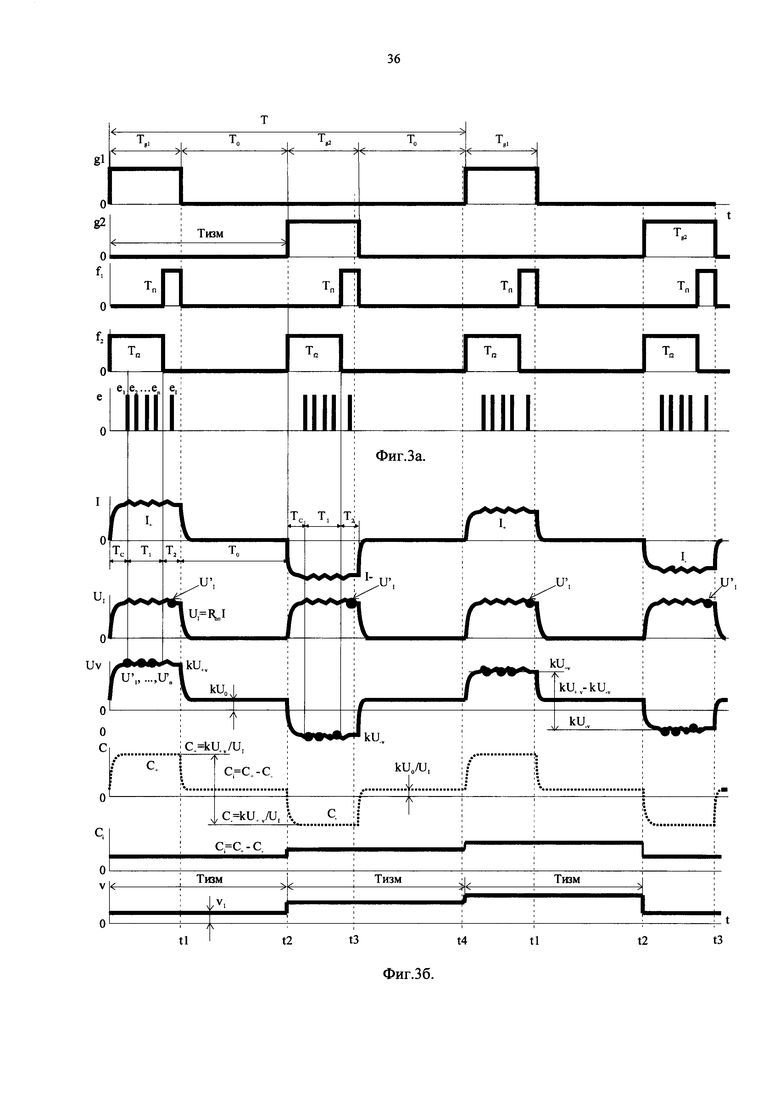
На фиг. 3а представлены временные диаграммы управляющих сигналов погружного датчика локальной скорости.
На фиг. 3б представлены временные диаграммы основных информационных сигналов погружного датчика локальной скорости.
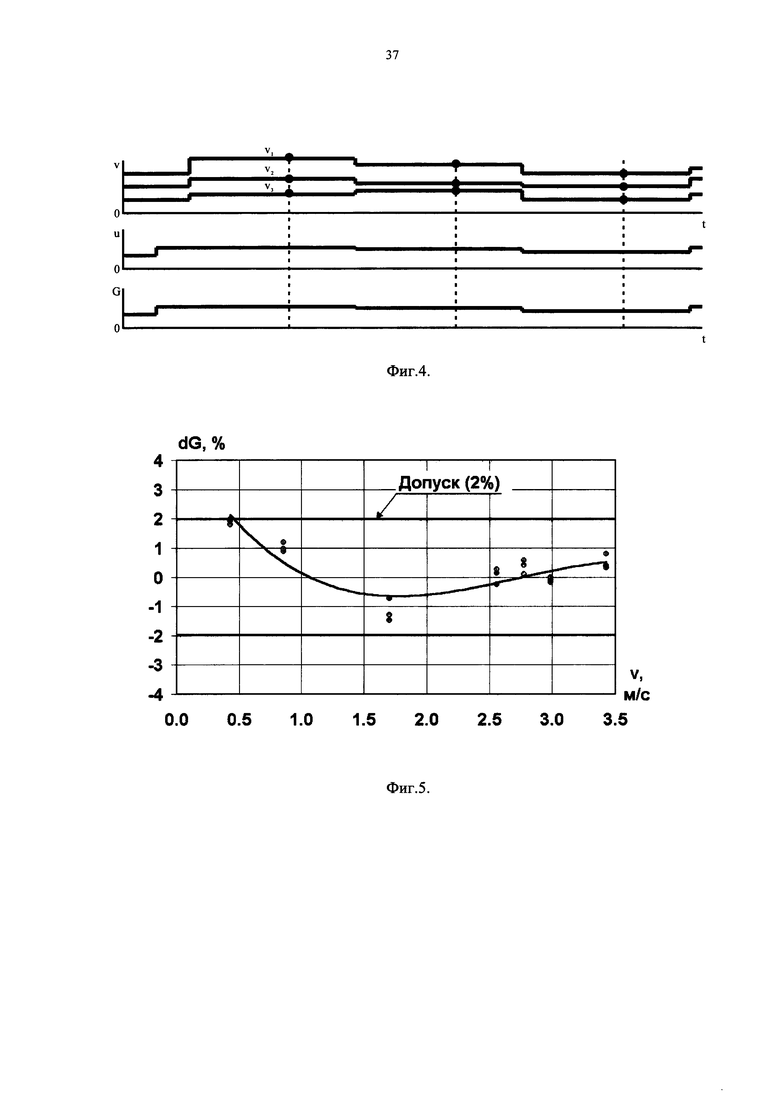
На фиг. 4 представлены временные диаграммы объемного расхода, локальной и средней скорости измеряемой (контролируемой) жидкости.
На фиг. 5 показаны результаты экспериментального исследования заявляемого устройства.
Устройство на фиг. 1а, б содержит: трубопровод 1, три погружных датчика локальной скорости 2, включающие магнитную систему с катушками 3 и чувствительным элементом (ЧЭ) 4 с электродами (контактами) Э1-Э2, погруженные в электропроводящую жидкость 5, преобразователи первичных сигналов (ППС 1, 2, 3).
На фиг. 1в на поперечном сечении трубопровода 1 показаны изолинии И локальной скорости потока жидкости, искаженного погружными датчиками локальной скорости 2, значения локальной скорости v1-3 в измерительных точках 1-3.
Преобразователи первичных сигналов (ППС 1, 2, 3) закреплены на погружных датчиках локальной скорости 2 с наружной стороны относительно трубопровода 1.
Контролируемая электропроводная жидкость 5, движущаяся через трубопровод 1, попадает в локальную зону действия магнитного поля, создаваемого катушками 3 магнитной системой погружных датчиков локальной скорости (на основе электромагнитных расходомеров) при протекании через них электрического тока. В результате чего по закону Фарадея об электромагнитной индукции, в ней индуцируется электродвижущая сила (ЭДС), создающая на электродах Э1-Э2 чувствительного элемента 4 разность потенциалов, то есть информационные сигналы U±v1-3, пропорциональное локальной скорости v1-3 в измерительных точках погружных датчиков локальной скорости 2 (фиг. 1в).
Перед вводом в эксплуатацию устройства определяют геометрические параметры (см. фиг. 1а): внутренний диаметр трубопровода D, диаметр погружной части d погружных датчиков локальной скорости ПДЛС, глубины погружения чувствительных элементов ПДЛС h1-3, расстояния от внутренней стенки трубопровода до измерительных точек Y1-3 как Y1-3=h1-3+Xeff, где Xeff - расстояние от торца ПДЛС до измерительной точки. Для ПДЛС, используемых в заявляемых устройстве Xeff=2 мм. Указанные геометрические параметры запоминают в ППС 1, 2, 3.
На фиг. 2а, б блок-схема устройства для измерения расхода жидкости содержит: трубопровод 1 с измеряемой жидкостью 5, погружной датчик локальной скорости 2, содержащий катушку 3 и чувствительный элемент 4 с электродами Э1-Э2, три преобразователя первичных сигналов ППС 1, 2, 3 (см. фиг. 2б), каждый из которых содержит (см. фиг. 2а) формирователь тока 6 включающий ключи К1, К2 с переключателем, датчик тока 7 включающий опорный резистор Rоп, переключатель 8, быстродействующий аналого-цифровой преобразователь 9, микроконтроллер 10, предварительный усилитель с дифференциальным входом 11. Кроме того, блок-схема (см. фиг. 2б) содержит три многоканальных блока питания постоянного тока (МБП) с раздельными каналами 12 и 13, вычислительный блок ВБ, содержащий микропроцессор 14, блок памяти 15, индикатор 16, кнопочную четырехклавишную клавиатуру 17 и раздельный автономный блок питания постоянного тока 18.
Канал питания (подмагничивания) катушек 3 состоит из формирователя тока 6, датчика тока 7, микроконтроллера 10 и МБП с раздельным каналом 12.
Измерительный канал локальной скорости контролируемой жидкости состоит из чувствительного элемента 4 погружного датчика локальной скорости 2 с электродами Э1-Э2, предварительного усилителя с дифференциальным входом 11, переключателя 8, быстродействующий АЦП 9 микроконтроллера 10 и МБП с каналом 13.
Совокупность, состоящая из датчика локальной скорости 2 и подключенного к нему преобразователя первичных сигналов представляет собой измеритель локальной скорости ИС (см. фиг. 2а).
Вычислительный блок устройства состоит из микропроцессора 14, блока памяти 15, индикатора 16, кнопочной четырехклавишной клавиатуры 17 и автономного блока питания постоянного тока 18. Микропроцессор 14 взаимодействует с микроконтроллерами 10 ППС-1, 2, 3 путем их опроса и подачи команд управления. Оператор подает команды микропроцессору через клавиатуру 17 и считывает информацию с индикатора 16.
Измерительный канал расхода контролируемой жидкости состоит из описанных выше трех измерительных каналов локальной скорости v1-3 и вычислительного блока
В блоках формирователя тока 6 ключи К1, К2 являются неотделимой частью формирователя тока и находятся внутри него. Ключи К1, К2 и переключатель 8 являются бесконтактными логически управляемыми элементами.
Выход электродов ПДЛС Э1-Э2 через предварительный усилитель 11, переключатель 8, АЦП 9 подсоединен ко входу микроконтроллера 10, а выходы микроконтроллеров ППС-1, 2, 3 подключены ко входу микропроцессора 14 вычислительного блока ВБ, при этом микропроцессор 14 соединен с блоком памяти 15, индикатором 16, клавиатурой 17 и автономным блоком питания 18 (фиг. 2б).
Выходы катушек 3 ПДЛС 2 подсоединены через формирователи тока 6 включающей ключи К1, К2, опорные резисторы Rоп датчиков тока 7 к каналам 12 МБП. Выход канала 12 МБП соединен отрицательным полюсом устройства в точке Б. Управляющие выходы g1 и g2 микроконтроллера 10 подсоединены к формирователю тока 6 (через ключи К1, К2). Управляющий выход е микроконтроллера 10 подсоединен к переключателю 8. Управляющий выход f микроконтроллера 10 подсоединен к АЦП 9. Выход датчика тока 7 подсоединен ко входу переключателя 8,. Выход канала 13 МБП соединен с предварительным усилителем 11, переключателем 8, АЦП 9, микроконтроллером 10 в точках а-г.
Управляющий выход р микропроцессора 14 соединен с соответствующими управляющими входами микропроцессоров 10 (фиг. 2а) ППС 1, 2, 3 (фиг. 2б).
Информационные цифровые выходы v'1,2,3 микропроцессоров 10 ППС 1, 2, 3 соединены с информационным входом микропроцессора 14 (фиг. 2а. б).
Отрицательные полюсы каналов 12 и 13 МБП, а также автономного блока питания постоянного тока 18 соединены с отрицательным полюсом общей шины питания устройства в точке Б. Отрицательный полюс общей шины питания устройства в точке Б электрически изолирован от местного защитного заземления в точке В. Защитный корпус преобразователей первичных сигналов в точке В соединены с местным защитным заземлением в точке з.
ПДЛС разработаны на базе погружных электромагнитных датчиков локальной скорости, входящих в сосав расходомеров типа РМ-5-Б3 для трубопроводов больших диаметров, разработанных и макетированных в компании ООО «ТБН энергосервис».
Предварительные усилители 11 разработаны на основе интегральных микросхем типа AD8221 фирмы Analog Devices (США).
В устройстве в качестве переключателя 8 используется интегральная микросхема типа AD707 фирмы Analog Devices (США). В качестве аналого-цифрового преобразователя 9 используется интегральная микросхема типа AD7714 фирмы Analog Devices (США).
В устройстве используется микроконтроллер типа AT89C51R02 фирмы Atmel (США).
В устройстве в вычисленном блоке ВБ используется микропроцессор 14 типа Atmega 128 фирмы Atmel (США), блок памяти 15 типа AT45DB фирмы Atmel (США), индикатор 16 типа WH1601 фирмы Winstar (Китай).
Формирователь тока 6, датчик тока 7, кнопочная четырехклавишная клавиатура 17 разработаны в ООО «ТБН энергосервис».
Формирователь тока 6 разработан на базе оптронов ILD213 фирмы Vishay (США) и ключей IRF7343 фирмы IRF (США).
Датчик тока 7 разработан на основе резистивного делителя, в котором использован опорный прецизионный резистор (Rоп=0.5 Ом, мощность 0.25 Вт), а также пассивного фильтра на чип-резисторах типа 0805 фирмы SINETECH (Тайвань).
Кнопочная четырехклавишная клавиатура 17 разработана на базе тактовых кнопок TS-A4PS-130 фирмы Switronic Industrial (Китай). В устройстве используется формирователь тока и клавиатура производства «ТБН энергосервис».
В устройстве используется МБП типа БП(и)-3В (канал 12: напряжение 12 В, ток нагрузки - 0.5 А; канал 13: напряжение 9 В, ток нагрузки - 0.3 А) производства ООО «ТБН энергосервис».
В устройстве используется автономный блок питания 18 постоянного тока типа БП(и)-3В (используется один канал напряжение 9 В, ток нагрузки - 0.3 А)) производства ООО «ТБН энергосервис».
Все выше перечисленные электрорадиоэлементы известны и выпускается в электронной промышленности.
Функционирование устройства (фиг. 2а, б) при определении расхода электропроводящей жидкости в трубопроводах больших диаметров происходит при полностью заполненном трубопроводе 1 контролируемой электропроводящей жидкостью 5 (нормальный режим работы устройства). Блоки питания устройства: МБП с каналами 12, 13 и автономный блок питания постоянного тока 18 питаются от промышленной сети переменного напряжения 220 В ±5% частотой 50±1 Гц. Блоки: предварительный усилитель 11, переключатель 8, АЦП 9, микроконтроллер 10 питаются от канала 13 МБП. Формирователь тока 6, датчик тока 7 питаются от канала 12 МБП. Микропроцессор 14, блок памяти 15, индикатор 16 и клавиатура 17 питаются от автономного блока питания постоянного тока 18 (в точках д-з).
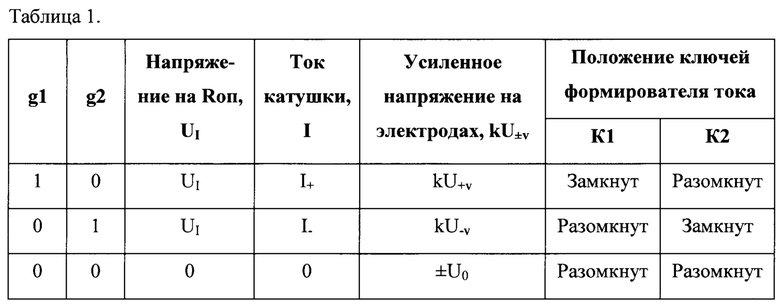
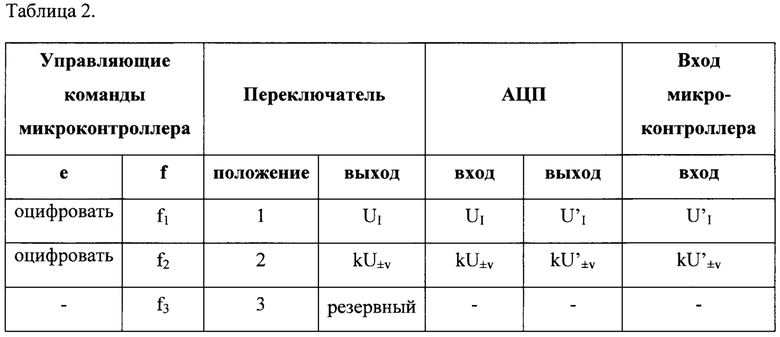
В устройстве под управлением микроконтроллеров 10 происходит формирование информационного сигнала U±v с выходов электродов Э1-Э2 и сигнала тока катушки UI снимаемого с опорного резистора Rоп датчика тока 7, формирование тока через катушку происходит по управляющим логическим сигналам g1, g2 формируемым микропроцессором (см. (см. фиг. 3а и таблицу 1), оцифровка информационного сигнала U±v и сигнала тока катушки UI происходит по управляющим командам f1,2 и е, подаваемым микроконтроллером 10 соответственно на переключатель 8 и АЦП 9 согласно заранее составленному алгоритму и программе для микропроцессора (см. таблицу 2). Оцифровка сигнала тока катушки UI происходит после подачи микроконтроллером 10 команды f1 на переключатель 8 и команды е на АЦП. Оцифровка сигнала U±v происходит после подачи микроконтроллером 10 команды f2 на переключатель 8 и n команд е на АЦП (см. фиг. 3б и таблицу 2).

При этом напряжение от канала 12 МБП через датчик тока 7, формирователь тока 6 поступает на вход катушек 3. Формирование тока питания катушек I+, I- в виде меандра (фиг. 3б) происходит при подаче на вход формирователя тока 6 прямоугольных логических сигналов g1, g2 от микроконтроллера 10 (фиг 2а). После обеспечения питания катушек 3 и вышеуказанных блоков под воздействием движущейся электропроводящей жидкости 5 на электродах Э1-Э2 чувствительного элемента 4 погружного датчика локальной скорости 2 индуцируется информационный сигнал U±v1,2,3, который поступает на вход предварительного усилителя 11, затем согласованный и усиленный информационный сигнал kU±v с выхода предварительного усилителя 11 через переключатель 8 поступает на вход АЦП 9. Оцифрованный информационный сигнал kU'±v с выхода АЦП 9 поступает на микроконтроллер 10.
Кроме того, сигнал с выхода датчика тока UI, снимаемый с опорного резистора Rоп, поступает через переключатель 8 на вход АЦП. Оцифрованный сигнал тока катушки U'I с выхода АЦП подается на вход микроконтроллера 10.
Таким образом, на вход микроконтроллера 10 поступают следующие оцифрованные (цифровые) информационные сигналы: сигнал тока катушки U'I снимаемый с опорного резистора Rоп в датчике тока 7 (при любом состоянии ключей К1, К2 формирователя тока 6); усиленный информационный сигнал kU'±v с выхода предварительного усилителя 11 (фиг. 2а). Эти сигналы, то есть сигнал тока катушки U'I и усиленный информационный сигнал kU'±v несут информацию о величине локальной скорости v контролируемой жидкости.
Согласно составленному алгоритму и программе для микроконтроллера сигнал тока катушки U'I и усиленный информационный сигнал kU'±v обрабатываются и преобразуются в значения локальной скорости v. Значения локальной скорости v запоминаются в оперативной памяти микроконтроллеров 10 ППС 1, 2, 3 (фиг. 3б).
Из микропроцессора 14 на микроконтроллеры 10 ППС 1, 2, 3 поступает логический сигнал р (запрос), в результате чего с выходов микроконтроллеров 10 ППС 1, 2, 3 на вход микропроцессора 14 подается цифровой сигнал, пропорциональный локальной скорости v1,2,3.
Микропроцессор 14 вычислительного блока ВБ запрашивает ежесекундно из микроконтроллеров 10 ППС 1, 2, 3 значения локальных скоростей v1,2,3 контролируемой жидкости (см. фиг. 2 и фиг. 4).
Микропроцессор 14 в автоматическом режиме согласно составленному алгоритму и программе для микропроцессора по значениям цифровых сигналов, пропорциональным локальным скоростям потока v1, v2 и v3 (фиг. 4) вычисляет среднюю по сечению скорость u и объемный расход G контролируемой жидкости как произведение средней скорости на площадь измерительного сечения трубопровода за вычетом площади миделей погружных частей датчиков локальной скорости.
Результаты измерений сохраняются в оперативной памяти микропроцессора 14 до поступления новых измерений в следующем измерительном цикле ТИЗМ, при этом старые измерения в оперативной памяти заменяются новыми, а также согласно командам микропроцессора 14 запоминаются и сохраняются в блоке памяти 15 и выводятся на индикатор 16. Далее процесс повторяется. Ввод параметров и управление устройством осуществляется оператором при помощи кнопочной четырехклавишной клавиатуры 17.
Принцип работы устройства основан на взаимодействии движущейся контролируемой электропроводящей жидкости 5 с магнитным полем катушек 3 и заключается в следующем: при заполненном трубопроводе 1 электропропроводящей жидкостью 5 с помощью формирователей тока 6 питают знакопеременным током катушки 3 магнитных систем погружных датчиков локальной скорости 2, создающие магнитное поле в локальной области вблизи электродов Э1-Э2 в измерительных точках i1,2,3 (см. фиг. 1в). При движении жидкости 5 в магнитном поле индуцируется ЭДС, наводящая на электродах Э1-Э2 чувствительных элементов 4 датчиков локальной скорости 2 сигнал U±v1,2,3 пропорциональный локальной скорости v1,2,3 в измерительных точках i1,2,3 и индукции магнитного поля. Сигналы U±v1,2,3 после согласования и усиления предварительным усилителем 11, оцифровки в АЦП 9 и обработки в микроконтроллере 10 ППС 1, 2, 3 преобразуются в цифровые информационные сигналы, пропорциональные локальным скоростям контролируемой жидкости v1,2,3. Цифровые сигналы, пропорциональные локальным скоростям v1, v2 и v3 (см. фиг. 2б и фиг. 4) измеряемой жидкости поступают в микропроцессор 14, где согласно предварительно составленному алгоритму и программе для микропроцессора обрабатываются с использованием метода «площадь-скорость». В результате чего на выходе микропроцессора 14 получают значения средней по сечению скорости u и объемного расхода G контролируемой жидкости
Способ определения расхода электропроводящей жидкости в трубопроводах больших диаметров реализуют следующим образом. Существует два типа конструкции расходомеров - расходомеры с полнопроходными датчиками расхода и расходомеры с погружными датчиками локальной скорости. Полнопроходные датчики расхода имеют конструкцию магнитной системы с магнитным полем, пронизывающим все поперечное сечение мерного участка трубопровода, причем этот тип конструкции применяют в основном в трубопроводах малых и средних диаметров Dy ≤300 мм.
Датчики локальной скорости имеют конструкцию магнитной системы с электромагнитным полем, заполняющим только ограниченную часть потока жидкости вблизи чувствительного элемента с электродами Э1-Э2, погруженного в измеряемую жидкость. Этот тип погружных датчиков локальной скорости применяет в основном в трубопроводах Dy ≥300 мм (фиг. 1а, б). В настоящее время одним из перспективных направлений расходометрии является создание способов измерения (определения) расхода электропроводящей жидкости на базе погружных электромагнитных датчиков локальной скорости с использованием метода «площадь-скорость». При этом выполняют следующие этапы реализации предложенного способа измерения расхода.
Этап 1. Калибровка измерителей локальной скорости.
Калибровку измерителей локальной скорости производят проливным или имитационным способом. В процессе калибровки измерителя локальной скорости ИС (см. фиг. 2а), состоящего из погружного датчика локальной скорости и преобразователя первичных сигналов ППС определяют номинальную статическую характеристику ИС. Калибровку каждого ИС производят автономно. Например, в процессе калибровки проливным способом на проливном стенде задают ряд значений эталонных локальных скоростей vэ в диапазоне (0.2…5) м/с. в измерительной точке датчика локальной скорости поверяемого ИС. Для каждого значения эталонной локальной скорости vэ измеряют значение информационного разностного сигнала Ci (см. фиг. 3б) ИС. Кроме этого измеряют значение информационного разностного сигнала Ci при нулевой скорости в трубопроводе. Полученные значения информационного разностного сигнала Ci и эталонной локальной скорости vэ запоминают в памяти микроконтроллера 10 ППС. Микроконтроллер 10 в автоматическом режиме согласно составленному алгоритму и программе для микроконтроллера использует значения информационного разностного сигнала Ci и эталонной локальной скорости vэ для кусочно-линейной аппроксимации номинальной статической характеристик ИС. Количество прямолинейных отрезков НСХ задают не менее трех.
Этап 2. Сборка и питание устройства.
Согласно фиг. 1а, б устанавливают три датчика локальной скорости 2 симметрично расположенных по образующей трубопровода 1 под углами 120 градусов, чувствительные элементы погружных датчиков локальной скорости погружают внутрь трубопровода полностью заполненного электропроводящей жидкостью 5 на глубину h, измеряют внутренний диаметр трубопровода D, измеренные значения h, D и значение параметра Xeff=2 мм и диаметр d погружной части используемых датчиков локальной скорости вводят в при помощи клавиатуры 17 и запоминают в блоке памяти 15 вычислительного блока ВБ.
С целью энергосбережения в устройстве используют импульсное питание катушек 3 погружных датчиков локальной скорости. Из фиг. 3б, (см. диаграмму тока I) видно, что в секундном цикле ток через катушку отсутствует в интервал времени паузы Т0=t1=t4 длительностью 640 мс. Откуда следует, что экономия электроэнергии из промышленной сети в канале 12 МБП по сравнению с непрерывным питанием составляет 100%⋅(640 мс/1000 мс)=64%.
Этап 3. Формирование тока в цепи катушек и цифровых информационных сигналов.
Для функционирования каналов питания катушек 3 на МБП подают напряжение питания 220 В, 50 Гц из промышленной сети (фиг. 2а). С выходов каналов 13 МБП запитывают предварительный усилитель 11, переключатель 8, АЦП 9, микроконтроллер 10. С выходов каналов 12 МБП запитывают формирователь тока 6 и датчик тока 7 (опорный резистор Rоп).
Таким образом в устройстве питание формирователей тока 6 осуществляют раздельно от питания блоков 8-11 (фиг. 2), при этом обеспечивают исключение влияния тока питания катушек на измерительные каналы что повышает точность измерения локальной скорости.
Ток питания катушек формируют независимо от режима работы трубопровода, то есть наполненности, скорости и температуры потока контролируемой жидкости 5. Формирование тока в цепи катушек показано на фиг. 3б (см. диаграмму тока I). Ток формируют при помощи формирователей тока 6, которые переключают логическими управляющими сигналами g1, g2 (фиг. 2а, фиг. 3а и таблица 1) формируемыми микроконтроллером 10. Сигнала тока катушки UI, пропорциональный силе тока, формируют в датчике тока 7 на опорном резисторе Rоп, который подают на вход переключателя 8.
Согласно составленному алгоритму и программе микроконтроллер 10 формирует управляющие логические сигналы g1 и g2 прямоугольной формы, которые подают на формирователь тока 6. Период следования Т управляющих логических сигналов g1, g2 равен 2с, длительность сигналов g1=g2=360 мс, причем передний фронт сигнала g2 сдвинут относительно заднего фронта сигнала g1 на время Т0=640 мс (см. фиг. 3а). При помощи формирователя тока 6 питают катушку 3 магнитной системы погружных датчиков локальной скорости током в форме меандра положительной и отрицательной полярности.
В течение интервала времени t1, микроконтроллер 10 подает на формирователь тока 6 логические управляющие сигналы g1=1 (ключ К1 замкнут) и g2=0 (ключ К2 разомкнут), при этом течет ток I+ через катушку 3 положительной полярности. В этот же интервал t1 спустя время установления переходного процесса тока Тс в течение интервала времени Т1 (см фиг. 3б, диаграмма I) микроконтроллер 10 подает сигнал управления f2 на переключатель 8 (см. таблицу 2), при этом через переключатель 8 с выхода предварительного усилителя 11 информационный сигнал kU±v поступает на вход АЦП 9 (см фиг. 2а). Таким образом, в интервал времени Т1 на вход АЦП 9 подают усиленный сигнал с электродов kU+v. Затем микропроцессор 10 подает команду е оцифровать на АЦП 9. При этом АЦП 9 производит оцифровку сигнала kU±v., подаваемого на его вход и передает в цифровом виде значение kU'+v. в микроконтроллер 10 для обработки. В течение интервала времени Т1 микроконтроллер 10 повторяет команду е неоднократно (например, n=10 раз), при этом оцифровка сигнала kU+v повторяется n раз (см. таблицу 2 и фиг. 3б, диаграмму е и kU+v) и n значений оцифрованного сигнала kU'+v запоминают в оперативной памяти микроконтроллера 10 для дальнейшей обработки. Далее, в течение интервала времени Т2, микроконтроллер 10 подает сигнал управления f1 на переключатель 8, при этом информационный сигнал датчика тока UI, пропорциональный току через катушку 3, с выхода датчика тока 7, снимаемый с опорного резистора Rоп подают через переключатель 8 на вход АЦП 9 (см фиг. 2а).
Затем микроконтроллер 10 подает команду е на АЦП 9, при этом АЦП 9 производит оцифровку сигнала датчика тока UI, подаваемого на его вход и передает в цифровом виде измеренное значение U'I. в микропроцессор для обработки (см таблицу 2 и фиг. 2а).
В течение интервала времени t2, длительность которого равна Т0=t2=t4, микроконтроллер 10 подает на формирователь тока 6 логические управляющие сигналы g1=0 (ключ К1 разомкнут) и g2=0 (ключ К2 разомкнут), цепь питания катушки 3 размыкается и ток через катушку отсутствует (см. таблицу 1 и фиг. 3а, б).
В течение интервала времени t3, микроконтроллер подает на формирователь тока логические управляющие сигналы g1=0 (ключ К1 разомкнут) и g2=1 (ключ К2 замкнут), при этом через катушку 3 течет ток I- отрицательной полярности (см. таблицу 1). Далее производят операции, аналогичные действиям в интервал времени t1, - микроконтроллер подает соответственно сигналы управления f1,2 на переключатель и команды е оцифровать на АЦП, в результате чего производится серия измерений сигнала kU-v и сигнала датчика тока UI во время отрицательного импульса тока через катушку 3 (см. таблицу 2 и фиг. 3б). Оцифрованный сигнал датчика тока U'I и n значений оцифрованного сигнала kU'-v запоминают в оперативной памяти микроконтроллера 10 для дальнейшей обработки.
В течение интервала времени t4, длительность которого равна Т0=t2=t4, микроконтроллер подает на формирователь тока логические управляющие сигналы g1=0 (ключ К1 разомкнут) и g2=0 (ключ К2 разомкнут), цепь питания катушки размыкается и ток через катушку отсутствует (см. таблицу 1 и фиг. 3а, б). Далее процесс повторяется.
Этап 4. Повышение точности измерения локальной скорости.
Точность измерения локальной скорости контролируемого потока жидкости повышают следующим образом: n значений (например, n=10) оцифрованного сигнала kU'+v,j, полученных на этапе 3 в течение интервала времени t1 и запомненных в оперативной памяти микроконтроллера 10 (j - номер запомненного значения kU'+v,j из текущей серии измерений j=1, … n) обрабатывают статистическими методами согласно заранее составленной методике, реализованной в программе для микроконтроллера 10. С целью повышения экономической эффективности используют простой метод статистической обработки, который может быть реализован в недорогом микропроцессоре, использованном в заявляемом устройстве. Например, метод усреднения с исключением выбросов, по которому отбрасывают максимальное и минимальное значение kU'+v,j, оставшиеся n-2 значения kU'+v,j усредняют, при этом полученное после усреднения значение kU'+v запоминают в оперативной памяти микроконтроллера 10 и используют в дальнейших вычислениях. Указанным методом существенно уменьшают случайную составляющую относительной погрешности измерения локальной скорости до величины от 0.1 до 0.01%.
Аналогичные действия используют при обработке n значений оцифрованного сигнала kU'-v,j, полученных на этапе 3 в течение интервала времени t3 и записанных в оперативную память микроконтроллера.
Далее аналогичные действия повторяют в каждом измерительном цикле Тизм.
Этап 5. Процесс формирования информационного разностного сигнала.
Информационный разностный сигнал Ci, пропорциональный локальной скорости контролируемой жидкости, необходим для вычисления локальной скорости по НСХ измерителя локальной скорости, полученной на этапе 1.
Информационный разностный сигнал Ci формируют в микропроцессоре 10.
Используют тот факт, что направление и величина индукции магнитного поля в измерительной точке i1 датчика локальной скорости 2 (см. фиг. 1а-в) пропорционально изменяется в соответствии с изменением направления и величины тока через катушку 3 и не зависит от изменения параметров контролируемой жидкости 5 При этом информационный сигнал U±v на электродах Э1-Э2 (фиг. 2) погружного датчика локальной скорости 2 изменяется пропорционально величине локальной скорости v контролируемой электропроводящей жидкости 5 и величине индукции В магнитного поля в измерительной точке i1: U±v ~ v⋅B. Так как величина индукции В пропорциональна току I± через катушку 3, то U±v ~ v⋅UI, где UI - сигнал датчика тока катушки 3: UI=|Rоп⋅I±|, где Rоп [Ом] - сопротивление опорного резистора в цепи датчика тока катушки. При этом используют тот факт, что индуцируемое напряжение U±v на электродах Э1-Э2 по величине и по характеру зависит от величины и характера сигнала датчика тока катушки UI в цепи катушки. Эту зависимость преобразуют к виду С=kU±v/UI, где k - коэффициент усиления предварительного усилителя 11 (фиг. 3б, диаграмма С), тем самым устраняют влияние нестабильности сигнала U±v, связанное с нестабильностью тока питания катушек и снижают требования к обеспечению стабильности амплитуды импульсов тока катушек (см. фиг. 3б, диаграмму С).
Учитывая тот факт, что на электродах Э1-Э2 возникает также сигнал смещения U0, обусловленный протеканием на электродах побочных электрохимических процессов, сигнал С будет сдвинут на величину С0=kU0/UI (см. фиг. 3б, диаграмму С). Значение С0 может быть положительным и отрицательным, что объясняется неоднородностью материала электродов и состава электропроводящей жидкости.
Это смещение устраняют следующим образом: микроконтроллер 10 в автоматическом режиме согласно составленному алгоритму и программе рассчитывает значения информационного разностного сигнала Ci
Ci=С+-С-=kU+v/UI-kU-v/UI=(U+/I+-U-/I-)⋅k/Rоп
где U+ и U- - суммарный сигнал соответственно положительной и отрицательной полярности, снимаемый с электродов Э1-Э2 погружного датчика локальной скорости в различные интервалы времени измерительного цикла Тизм:
U+=U0+U+v в интервал времени формирования положительных импульсов (см. фиг. 3б) t1 - когда логические управляющие сигналы g1=1, g2=0, ключ К1 замкнут, К2 разомкнут и через катушку 3 течет ток положительной полярности;
U-=U0-U-v в интервал времени формирования отрицательных импульсов (см. фиг. 3б) t3 - когда логические управляющие сигналы g1=0, g2=1, ключ К1 разомкнут, К2 замкнут и через катушку 3 течет ток отрицательной полярности;
U0 - суммарный сигнал в интервалы времени паузы t2 и t4, когда логические управляющие сигналы g1=0, g2=0, ключи К1, К2 разомкнуты и ток через катушку 3 отсутствует.
Таким образом, информационный разностный сигнал Ci является сигналом, характеризующим локальную скорость с повышенным качеством, так как он зависит только от локальной скорости и на его величину не влияет нестабильность тока питания катушек и сигнал смещения U0, обусловленный протеканием на электродах побочных электрохимических процессов. Величина Ci является безразмерной и ее получают путем совершения арифметических действий над двумя измеренными сигналами U±v и UI измеренными в разные моменты времени, когда ток через катушку имеет соответственно положительную и отрицательную полярность. Разностный информационный сигнал Ci является комбинированным и не связан напрямую с физикой формирования информационных сигналов локальной скорости U±v и сигнала тока катушки UI.
Для предварительного усилителя 11 коэффициент усиления k=13.6, опорное сопротивление датчика тока Rоп=0.5 Ом. По экспериментальным данным при значении локальной скорости 1 м/с и токе через катушку 300 мА на выходе используемых в устройстве погружных датчиков локальной скорости возникает характерное значение сигнала U+v=|U-v|=10 мкВ. Например, при смещении сигнала U0=1.25 мкВ получим:
Ci=[(1.25+10)⋅10-6-(1.25-10)⋅10-6)]⋅13.6/(0.5⋅300⋅10-3)=1.81⋅10-3
При нулевом смещении U0=0 мкВ получим то же значение Ci
Ci=[(0+10)⋅10-6-(0-10)⋅10-6)]⋅13.6/(0.5⋅300⋅10-3)=1.81⋅10-3
Таким образом исключают влияние смещения U0 на результаты измерения информационного разностного сигнала Ci и повышают точность измерения локальной скорости контролируемой жидкости. В приведенном примере смещение составляет 10% от полезного сигнала. Использование метода формирования разностного сигнала позволяет полностью устранить компоненту относительной погрешности измерения локальной скорости, связанную со смещением U0, то есть снизить ее до точности цифровых преобразований аналоговых сигналов. В заявляемом устройстве используют 24-разрядный АЦП, таким образом точность цифровых преобразований определяется шагом оцифровки равным 1/224.
В процессе формирования информационного разностного сигнала используют обработанное в микропроцессоре 10 значение kU'±v, полученное на этапе 4. При этом kU'±v измеряют в течение времени T1=Т+-Тс-Т2=(360-60-60) мс=240 мс (см. фиг. 3б, диаграммы I и Uv), где Тс - время переходного процесса в канале питания катушек, Т2 - время, зарезервированное для измерения величины тока I через катушку 3 равное Т2=60 мс исходя из технических характеристик АЦП 9, примененного в устройстве, а величину тока I+ через катушку 3 измеряют после kU+v, величину тока I измеряют после измерении kU-v (см. фиг. 3б, диаграмма Uv).
Этап 6. Измерения локальных скоростей.
Микроконтроллер 10, определенную на этапе 1 (калибровка) номинальную статическую характеристику измерителя локальной скорости, по измеренным значениям информационного разностного сигнала Ci, полученного на этапе 5, определяет значения локальной скорости v контролируемой жидкости.
Результаты измерений локальной скорости v в ППС 1, 2, 3 контролируемой жидкости 5 запоминают в оперативной памяти микроконтроллеров 10 в течение времени измерительного цикла Тизм=Tg1+Т0=Tg2+Т0 (например, Тизм=1 сек, см. рис. 3б, диаграммы локальной скорости v) до поступления новых измерений в следующем измерительном цикле Тизм. При этом старые измерения заменяются новыми, то есть наступает следующий измерительный цикл.
Этап 7. Измерения средней скорости и расхода.
В устройстве питание вычислительного блока ВБ осуществляют от автономного блока питания постоянного тока 18. Микропроцессор 14 в автоматическом режиме согласно составленному алгоритму и программе для микропроцессора считывает из памяти микроконтроллеров 10 текущие измеренные на этапе 6 значения локальных скоростей v1, v2 и v3 в измерительных точках i1,2,3 погружных датчиков локальной скорости (см. фиг. 1в).
Среднюю скорость и контролируемой жидкости 5 в мерном участке трубопровода 1 (см. фиг. 1а, б, в) вычисляют согласно выражению:
где N - число измерителей локальной скорости; αi - нормированные коэффициенты скорости, vi - значения локальной скорости в измерительных точках.
Величину расхода контролируемой жидкости вычисляют как произведение средней скорости на площадь измерительного сечения:
Gv=uS.
Площадь измерительного сечения рассчитывают по формуле:
S=πD2/4-SM,
где: D - внутренний диаметр трубопровода, Sм - суммарная площадь миделей датчика локальной скорости  d - диаметр датчика скорости; hi - глубина погружения i-го датчика локальной скорости.
d - диаметр датчика скорости; hi - глубина погружения i-го датчика локальной скорости.
Например, при следующих значениях параметров:
D=520 мм, d=37 мм, Θ=20°C, h1=h2=h3=30 мм, Xeff=2 мм, v1=v2=v3=1 м/с
α1=α2=α3=1.0837
u=1.0837 м/с
G=815.55 м3/ч
Таким образом, обобщая действия в этапах 3-7, получаем отличительную часть заявляемого изобретения.
Во время измерительного цикла Т в течение промежутков времени t1, t2, t3, t4 в микроконтроллере 10 задают следующие уровни логических управляющих сигналов (фиг. 2а и таблицу 1 и фиг. 3а): в интервал времени формирования положительных импульсов t1 уровни логических управляющих сигналов g1=1 (ключ К1 замкнут, «Да», то есть ток проходит через цепь), g2=0 (ключ К2 разомкнут, «Нет», то есть ток не проходит через цепь); в интервал времени паузы t2 уровни логических управляющих сигналов g1=0 (К1 «Нет»), g2=0 (К2 «Нет»); в интервал времени формирования отрицательных импульсов t3 уровни логических управляющих сигналов g1=0 (К1 «Нет»), g2=1 (К2 «Да»); в интервал времени паузы t4 уровни логических управляющих сигналов g1=0 (К1 «Нет»), g2=0 (К2 «Нет»); соответственно микроконтроллер 10 формирует логические управляющие сигналы g1, g2, в формирователе тока формируют положительный полупериод меандра тока катушки I+ в период времени Tg1, с электродов Э1, Э2 снимают индуцированное напряжение U±v пропорциональное локальной скорости контролируемой жидкости v, подают U±v на вход предварительного усилителя 11, на его выходе имеют согласованный и усиленный сигнал kU±v, оцифровывают данный сигнал и получают на выходе АЦП 9 цифровой сигнал kU'±v затем, по истечении времени паузы T0=t2=t4 формируют отрицательный полупериод меандра тока катушки I- в период времени Tg2, задние фронты управляющего логического сигнала g2, отрицательного полупериода меандра тока катушки I- и напряжения U-v сдвинуты относительно передних фронтов управляющего логического сигнала g1, положительного полупериода меандра тока катушки I+ и напряжения U+v на время Т0, оцифровку сигналов U±v и UI (сигнал, пропорциональный току через катушку, снимаемый с опорного резистора Rоп датчика тока 7) производят в интервалы времени t1 и t3, причем сигнал kU±v оцифровывают в интервал времени Т1 после завершения интервала времени переходного процесса Тс, затем оцифровывают сигнал UI в интервал времени Т2, зарезервированном микроконтроллером для измерения тока через катушку, в указанные интервалы времени t1 и t3 микроконтроллер соответственно подает управляющий сигнал-команду f2 на переключатель 8, при этом с выхода предварительного усилителя 11 на вход АЦП подают сигнал U±v (см. таблицу 2 и фиг. 3б), затем микроконтроллер подает управляющий сигнал-команду е оцифровать неоднократно n раз (например, n=10 раз с равномерным или неравномерным шагом) на АЦП 9, n значений оцифрованного сигнала kU'±v подают на вход микроконтроллера и запоминают в оперативной памяти микроконтроллера для дальнейшей обработки, затем микроконтроллер подает управляющий сигнал-команду f1 на переключатель 8, при этом с выхода датчика тока на вход АЦП подают сигнал датчика тока UI (см. таблицу 2), пропорциональный току через катушку, затем микроконтроллер подает управляющий сигнал-команду е оцифровать на АЦП 9, оцифрованный сигнал U'I подают на вход микроконтроллера и запоминают в его оперативной памяти для дальнейшей обработки.
Также уменьшают случайную составляющую относительной погрешности измерения локальной скорости следующим образом: n значений оцифрованного сигнала kU'±v,j, получают в интервалы времени формирования положительных и отрицательных импульсов t1 и t3, записывают в оперативную память микроконтроллера 10, обрабатывают согласно заранее составленной методике, реализованной в программе для микроконтроллера 10 при этом используют метод усреднения с исключением выбросов, по которому отбрасывают максимальное и минимальное значение kU'±v,j, оставшиеся n-2 значения kU'±v,j усредняют, при этом полученное после усреднения значение kU'±v запоминают в оперативной памяти микроконтроллера 10 и используют в дальнейших вычислениях.
Также устраняют влияние нестабильности сигнала U±v, связанное с нестабильностью тока питания катушек и одновременно устраняют сигнал смещения U0, обусловленный протеканием на электродах побочных электрохимических процессов, для чего в автоматическом режиме согласно составленному алгоритму и программе для микроконтроллера рассчитывают в микроконтроллере 10 значения информационного разностного сигнала Ci
Ci=С+-С-=kU+v/UI-kU-v/UI=(U+/I+-U-/I-)⋅k/Rоп,
где U+ и U- - суммарный сигнал соответственно положительной и отрицательной полярности, снимаемый с электродов Э1-Э2 погружного датчика локальной скорости в различные интервалы времени измерительного цикла Тизм;
U+=U0+U+v в интервал времени формирования положительных импульсов t1 - когда логические управляющие сигналы g1=1, g2=0, ключ К1 замкнут, К2 разомкнут и через катушку 3 течет ток положительной полярности;
U-=U0-U-v в интервал времени формирования отрицательных импульсов t3 - когда логические управляющие сигналы g1=0, g2=1, ключ К1 разомкнут, К2 замкнут и через катушку 3 течет ток отрицательной полярности;
U0 - суммарный сигнал в интервалы времени паузы t2 и t4, когда логические управляющие сигналы g1=0, g2=0, ключи К1, К2 разомкнуты и ток через катушку 3 отсутствует.
Рассчитанные в микроконтроллере 10 значения информационного разностного сигнала Ci запоминают в его оперативной памяти до поступления новых значений Ci в следующих циклах измерений.
Измеряют значения локальной скорости v по измеренным значениям информационного разностного сигнала Ci, при этом используют НСХ измерителя локальной скорости ИС, полученную при его калибровке, запомненную и сохраненную в памяти микроконтроллера 10.
Результаты измерений локальной скорости v в ППС 1, 2, 3 контролируемой жидкости 5 сохраняют в оперативной памяти микроконтроллеров 10 в течение времени измерительного цикла Тизм=Tg1+Т0=Tg2+Т0 до поступления новых измерений в следующем измерительном цикле Тизм (см. фиг. 3б). При этом старые измерения заменяются новыми, то есть наступает следующий измерительный цикл.
Микропроцессор 14 в автоматическом режиме согласно составленному алгоритму и программе считывает из памяти микроконтроллеров 10 текущие измеренные значения локальных скоростей v1, v2 и v3 в измерительных точках i1,2,3 погружных датчиков локальной скорости (см. фиг. 1в).
Среднюю скорость u величину объемного расхода контролируемой жидкости Gv в мерном участке трубопровода 1 (см. фиг. 1а, б, в). вычисляют согласно этапу 7, на этом завершают измерительный период Т. Затем процедуру измерения повторяют неоднократно в следующих измерительных периодах Т.
Таким образом, совокупные действия известных и неизвестных отличительных признаков дают новые технические решения, что выгодно снижает погрешность измерения расхода жидкости, значительно сокращает потребление электроэнергии из промышленной сети (на 64%) и благодаря этим полезным свойствам расширяется область применения предложенного изобретения. Указанные новые свойства изобретения выгодно отличаются от выбранного аналога и прототипа, обусловливает, по мнению заявителя, соответствие изобретения критерию «изобретательский уровень». Для реализации изобретения использованы известные материалы в области радиоэлектроники и радиотехнической промышленности и созданы доступные алгоритмы с программным обеспечением для определения расхода в электропроводящей жидкости с высокой точностью (относительная погрешность не более 2%) в трубопроводах больших диаметров. Это обстоятельство, по мнению заявителя, позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
В ООО «ТБН энергосервис» для повышения точности измерения расхода электропроводящей жидкости при использовании погружных датчиков локальной скорости было проведено экспериментальное исследование на проливной установке УРОКС-400.
Эксперимент был проведен на макетных образцах модернизированного расходомера РМ-5-Б3, предназначенного для измерения и коммерческого учета объемного и массового расхода, объема и массы электропроводящей жидкости в трубопроводах больших диаметров, а также для использования в автоматизированных системах учета, контроля и регулирования количества тепла. На фиг. 5 показаны результаты определения относительной погрешности измерения расхода dG, полученные в ходе проведения экспериментов. Видно, что относительной погрешности измерения расхода dG не превышает 2% при изменении средней скорости потока измеряемой жидкости в диапазоне 0.4-3…5 м/с, что соответствует требованиям «Методики осуществления коммерческого учета тепловой энергии, теплоносителя», утвержденной приказом Министерства строительства и жилищно-коммунального хозяйства РФ от 17 марта 2014 г. №99/ПР, согласно которой расходомеры, в том числе расходомеры с электромагнитными погружными датчиками локальной скорости, должны обеспечивать измерение массы (объема) с относительной погрешностью (Eƒ):
класс 2: Eƒ=±(2+0,02Gmax/G), но не более ±5%, (12.7),
класс 1: Eƒ=±(1+0,01Gmax/G), но не более ±3,5%, (12.8),
где Eƒ - относительная погрешность расходомеров, Gmax - максимальный измеряемый расход, G - текущее значение измеряемого расхода.
Устройство позволяет выводить на алфавитно-цифровой индикатор:
- текущее значение объемного расхода по каждому трубопроводу, где установлены датчики локальной скорости, м3/ч;
- текущее значение массового расхода по каждому трубопроводу, где установлены датчики локальной скорости и температуры, т/ч;
- объем нарастающим итогом по каждому трубопроводу, где установлены датчики локальной скорости, м3;
- масса нарастающим итогом, по каждому трубопроводу, где установлены датчики локальной скорости и температуры, т;
- текущее значение температуры среды по каждому трубопроводу, где установлены датчики температуры, °C;
- текущее значение давления среды в трубопроводах по каждому трубопроводу, где установлены датчики давления, кгс/см2 и МПа;
- текущие значения температуры окружающего воздуха (при комплектовании устройства соответствующими датчиками), °C;
- время наработки, ч;
- текущие значения даты и времени;
- информация о модификации устройства, его параметрах настройки и состояния.
Информация, указанная выше, может передаваться в цифровом виде по интерфейсу RS-485 (а совместно с периферийными устройствами и по интерфейсу RS-232) на персональный компьютер и/или в автоматизированные системы учета, контроля и регулирования количества тепла.
Расходомер РМ-5-Б3 обеспечивает архивирование в энергонезависимой памяти почасового, посуточного, помесячного, погодового значений массы и объема контролируемой жидкости, значений измеренных параметров жидкости (расхода, температуры), времени наработки, и т.д.
Глубина архива составляет не менее:
- почасового - 45 дней;
- посуточного - 12 мес.;
- помесячного - 5 лет;
- погодового - 32 года;
- событий - 16 тыс. записей.
Питание устройства от сети переменного тока напряжения от 187 до 242 В, частотой 50±1 Гц. Мощность потребления, потребляемая РМ-5-Б3, не превышает 60 Вт.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ТЕПЛОСЧЕТЧИК И СПОСОБ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2694277C1 |
| ПОГРУЖНОЙ ДАТЧИК ЛОКАЛЬНОЙ СКОРОСТИ | 2017 |
|
RU2652649C1 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР И СПОСОБ КОНТРОЛЯ ИЗМЕРЕНИЯ РАСХОДА ТЕКУЧИХ СРЕД | 2013 |
|
RU2529598C1 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР И СПОСОБ КОНТРОЛЯ ИЗМЕРЕНИЯ РАСХОДА ТЕКУЧИХ СРЕД | 2013 |
|
RU2548051C1 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 2011 |
|
RU2489684C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА | 2016 |
|
RU2618505C1 |
| СПОСОБ РАБОТЫ УСТРОЙСТВА ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА СРЕДЫ МАГНИТОИНДУКЦИОННОГО РАСХОДОМЕРА (ВАРИАНТЫ) И МАГНИТОИНДУКЦИОННЫЙ РАСХОДОМЕР | 2009 |
|
RU2410646C2 |
| Способ определения допустимости использования феррозонда в магнитометре | 2020 |
|
RU2749303C1 |
| СЧЕТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2017 |
|
RU2643923C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СЧЁТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СТАТИЧЕСКИЙ | 2018 |
|
RU2695451C1 |
Изобретение относится к области измерительной техники и может быть использовано для определения расхода электропроводящих жидких сред с помощью электромагнитного расходомера с погружными датчиками локальной скорости. В устройство введены формирователь тока, датчик тока на основе опорного прецизионного резистора и пассивного фильтра на чип-резисторах, кнопочная четырехклавишная клавиатура. Способ определения расхода в трубопроводах больших диаметров ≥300 мм заключается в измерениях локальной скорости потока контролируемой жидкости в трех точках, которые размещены на фиксированной глубине погружения, путем возбуждения знакопеременного магнитного поля, формирования информационного сигнала по измеренной величине ЭДС, определения значения локальной и средней скорости и значения объемного расхода. Предлагаемое устройство и способ позволяют повысить точность, стабильность, а также расширить динамический диапазон измерения расхода жидкости в трубопроводах больших диаметров за счет способа обработки информационных сигналов при помощи метода формирования информационного разностного сигнала. Для защиты устройства от внешних электромагнитных помех, внутренних синфазных помех и земляных токов общая шина питания устройства изолирована от местного защитного заземления. Для повышения точности измерений локальной скорости контролируемого потока жидкости и снижения себестоимости используют простой метод статистической обработки, который может быть реализован в недорогом микропроцессоре, использованном в заявляемом устройстве. Например, метод усреднения с исключением выбросов, по которому отбрасывают максимальное и минимальное значение оцифрованного информационного сигнала, оставшиеся n-2 значения данного сигнала усредняют, при этом полученное после усреднения значение оцифрованного информационного сигнала запоминают в оперативной памяти устройства и используют в дальнейших вычислениях. Технический результат - повышение точности измерения расхода электропроводящей жидкости, сбережение электрической энергии и расширение области применения. 2 н.п. ф-лы, 5 ил.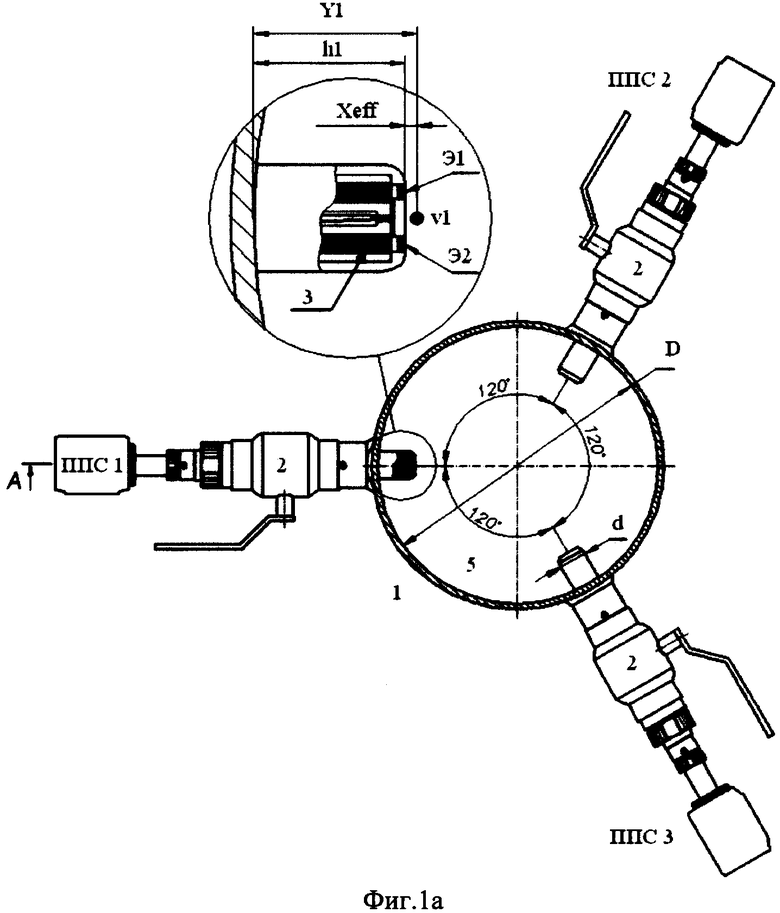
1. Способ для определения расхода в трубопроводах больших диаметров, в котором измерители локальной скорости устройства калибруют проливным способом при полностью заполненном электропроводящей жидкостью мерном участке проливного стенда, среднюю скорость u контролируемой жидкости в мерном участке трубопровода вычисляют согласно выражению: 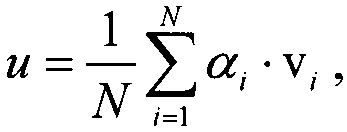 где N - число измерителей локальной скорости; αi - нормированные коэффициенты скорости, vi - значения локальной скорости в измерительных точках; величину расхода контролируемой жидкости вычисляют как произведение средней скорости на площадь измерительного сечения: Gv=u⋅S, площадь измерительного сечения рассчитывают по формуле: S=πD2/4-SM; где Sм - суммарная площадь миделей датчиков локальной скорости:
где N - число измерителей локальной скорости; αi - нормированные коэффициенты скорости, vi - значения локальной скорости в измерительных точках; величину расхода контролируемой жидкости вычисляют как произведение средней скорости на площадь измерительного сечения: Gv=u⋅S, площадь измерительного сечения рассчитывают по формуле: S=πD2/4-SM; где Sм - суммарная площадь миделей датчиков локальной скорости:  где d - диаметр датчика скорости; hi - глубина погружения i-го датчика локальной скорости, i=1, 2, 3;
где d - диаметр датчика скорости; hi - глубина погружения i-го датчика локальной скорости, i=1, 2, 3;
отличающийся тем, что в режиме калибровки измерителей локальной скорости определяют номинальную статическую характеристику, задают на проливном стенде в мерном участке ряд значений эталонных локальных скоростей vэ в измерительной точке погружного датчика локальной скорости; для каждого значения локальной скорости vэ измеряют значение информационного разностного сигнала Ci измерителя локальной скорости, причем значения эталонной локальной скорости vэ изменяют в диапазоне (0.2, …, 5) м/с, кроме того измеряют значение информационного разностного сигнала Ci при нулевой скорости контролируемой электропроводящей жидкости в трубопроводе, полученные значения разностного сигнала Ci и эталонной скорости vэ запоминают и сохраняют в памяти микроконтроллера преобразователя первичных сигналов в автоматическом режиме согласно составленному алгоритму и программе;
во время измерительного цикла Т в течение интервалов времени t1, t2, t3, t4 в микроконтроллере задают уровни логических управляющих сигналов: в интервал времени t1 - логические управляющие сигналы g1=1, g2=0; в интервал времени t2 - логические управляющие сигналы g1=0, g2=0; в интервал времени t3 - логические управляющие сигналы g1=0, g2=1; в интервал времени t4 - логические управляющие сигналы g1=0, g2=0; при этих условиях соответственно микроконтроллер формирует логические управляющие сигналы g1, g2, в формирователе тока формируют положительный полупериод меандра тока катушки I+ в интервал времени логического управляющего сигнала g1 длительностью Tg1, с электродов снимают информационный сигнал U±v, пропорциональный локальной скорости контролируемой жидкости v, подают его на вход предварительного усилителя, и на выходе имеют согласованный и усиленный информационный сигнал kU±v, затем оцифровывают данный сигнал и получают на выходе аналого-цифрового преобразователя оцифрованный информационный сигнал kU'±v, пропорциональный локальной скорости v, по истечении времени паузы Т0=t2 формируют отрицательный полупериод меандра тока катушки I- в интервал времени логического управляющего сигнала g2 длительностью Tg2, причем задние фронты управляющего логического сигнала g2, отрицательного полупериода меандра тока катушки I- и информационного сигнала U-v сдвинуты относительно передних фронтов управляющего логического сигнала g1, положительного полупериода меандра тока катушки I+ и информационного сигнала U+v на время паузы Т0=t4=t2, при этом в интервалы времени t1 и t3 формируют положительные и отрицательные полупериоды меандра тока через катушку и оцифровывают усиленный и согласованный информационный сигнал kU±v и сигнал тока через катушку UI, пропорциональный току в этой цепи, снимаемый с опорного резистора Rоп датчика тока, причем информационный сигнал kU±v оцифровывают в интервал времени T1 после завершения интервала времени переходного процесса Тс, затем оцифровывают сигнал, пропорциональный току через катушку UI в интервал времени Т2, зарезервированный микроконтроллером для измерения тока через катушку, в интервалы времени формирования положительного и отрицательного полупериода меандра тока через катушку t1 и t3 микроконтроллер соответственно подает управляющую команду f2 на переключатель, при этом с выхода предварительного усилителя на вход аналого-цифрового преобразователя подают информационный сигнал kU±v, затем микроконтроллер подает управляющую команду е оцифровать неоднократно n раз с равномерным или неравномерным шагом на аналого-цифровой преобразователь, n значений оцифрованного сигнала kU'±v запоминают в оперативной памяти микроконтроллера для дальнейшей обработки, затем микроконтроллер подает на переключатель управляющую команду f1, при этом с выхода датчика тока на вход АЦП подают сигнал датчика тока UI и на его выходе имеют оцифрованный сигнал датчика тока через катушку U'I, затем микроконтроллер подает управляющий сигнал-команду е оцифровать на АЦП, оцифрованный сигнал датчика тока через катушку U'I подают на вход микроконтроллера и запоминают в его оперативной памяти для дальнейшей обработки,
также уменьшают случайную составляющую относительной погрешности измерения локальной скорости: n значений оцифрованного информационного сигнала kU'±v,j, где j=1, 2 … n, получают в интервалы времени тока через катушку положительной полярности t1 и отрицательной полярности t3 и запоминают их в оперативной памяти микроконтроллера, обрабатывают согласно заранее составленной методике, реализованной в программе для микроконтроллера при этом используют метод усреднения с исключением выбросов, по которому отбрасывают максимальное и минимальное значение оцифрованного информационного сигнала kU'±v,j, оставшиеся n-2 значения этого сигнала усредняют, запоминают в оперативной памяти микроконтроллера и используют в дальнейших вычислениях,
также устраняют влияние нестабильности информационного сигнала U±v, связанное с нестабильностью тока питания катушек, и одновременно устраняют сигнал смещения U0, обусловленный протеканием на электродах побочных электрохимических процессов, в автоматическом режиме согласно составленному алгоритму и программе для микроконтроллера определяют значения информационного разностного сигнала Ci как:
Ci=С+-С-=kU+/UI+-kU-/UI-=(U+/I+-U-/I-)⋅k/Rоп,
где U+ и U- - суммарный сигнал соответственно положительной и отрицательной полярности, снимаемый с электродов погружного датчика локальной скорости в различные интервалы времени измерительного цикла Тизм;
U+=U0+Uv в интервал времени формирования положительного полупериода меандра тока через катушку t1, когда логические управляющие сигналы g1=1, g2=0 и через катушку течет ток положительной полярности;
U-=U0-Uv в интервал времени формирования отрицательного полупериода меандра тока через катушку t3, когда логические управляющие сигналы g1=0, g2=1 и через катушку течет ток отрицательной полярности;
U0 - суммарный сигнал в интервалы времени паузы t2 и t4, когда логические управляющие сигналы g1=0, g2=0 и ток через катушку отсутствует, при этом многоканальный блок питания в цепи катушки не потребляет электроэнергию из промышленной сети, то есть получают экономию;
определенные в микроконтроллере значения информационного разностного сигнала Ci запоминают в его оперативной памяти до поступления новых значений Ci в следующих циклах измерений,
также измеряют значения локальной скорости v по измеренным значениям информационного разностного сигнала Ci, при этом используют номинальную статическую характеристику измерителя локальной скорости, полученную при его калибровке, запоминают и сохраняют в памяти микроконтроллера,
результаты измерений локальной скорости v контролируемой жидкости в преобразователях первичных сигналов сохраняют в оперативной памяти микроконтроллеров в течение времени измерительного цикла Тизм=Tg1+Т0=Tg2+Т0 до поступления новых измерений в следующем измерительном цикле Тизм, при этом старые измерения заменяются новыми, то есть наступает следующий измерительный цикл,
затем микропроцессор автономно, независимо от работы преобразователей первичных сигналов, в автоматическом режиме согласно составленному алгоритму и программе считывает ежесекундно из памяти микроконтроллеров текущие измеренные значения локальных скоростей v1, v2 и v3 в измерительных точках i1, 2, 3 погружных датчиков локальной скорости.
2. Устройство для определения расхода в трубопроводах больших диаметров, содержащее мерный трубопровод, включающий три измерителя локальной скорости, каждый из которых состоит из преобразователя первичных сигналов и подсоединенного к нему погружного датчика локальной скорости, включающего магнитную систему с катушками, погружная часть которого содержит чувствительный элемент с электродами, и погруженного в трубопровод, полностью заполненный электропроводящей жидкостью, многоканальный блок питания постоянного тока, автономный блок питания постоянного тока, три преобразователя первичных сигналов на основе электромагнитных расходомеров, которые содержат предварительный усилитель, переключатель, аналого-цифровой преобразователь, микроконтроллер, вычислительный блок, который содержит микропроцессор, блок памяти и индикатор, при этом выход электродов через предварительный усилитель, переключатель, аналого-цифровой преобразователь подсоединен к входу микроконтроллера, а выходы микроконтроллеров соединены с входом микропроцессора вычислительного блока, выход микропроцессора соединен с блоком памяти и индикатором, выход, то есть положительный полюс автономного блока питания постоянного тока, соединен со схемами питания микропроцессора, блока памяти, индикатора в точках д, е, ж, з, один из выходов, то есть положительный полюс многоканального блока питания, соединен с цепями питания предварительного усилителя, переключателя, аналого-цифрового преобразователя, микроконтроллера в точках а, б, в, г, управляющий выход f микроконтроллера подсоединен к переключателю с целью выдачи на него управляющих команд f1, f2, управляющий выход е микроконтроллера подсоединен к аналого-цифровому преобразователю, управляющий выход р микропроцессора соединен с соответствующими управляющими входами р микропроцессоров преобразователей первичных сигналов, отличающееся тем, что дополнительно введены формирователь тока, включающий ключи К1, К2 с переключателем; датчик тока на основе опорного прецизионного резистора и пассивного фильтра на чип-резисторах, входящий в состав преобразователей первичных сигналов и включающий опорный резистор Rоп; кнопочная четырехклавишная клавиатура; причем в составленной программе использованы значения информационного разностного сигнала Ci и эталонной локальной скорости vэ для кусочно-линейной аппроксимации номинальной статической характеристики измерителя локальной скорости, количество отрезков аппроксимации номинальной статической характеристики задан не менее трех, чувствительные элементы погружных датчиков локальной скорости в режиме измерений погружены внутрь трубопровода, полностью заполненного электропроводящей жидкостью, на глубину h1, 2, 3, измерен внутренний диаметр трубопровода D, диаметры d погружных чувствительных элементов датчиков локальной скорости, расстояния от внутренней стенки трубопровода до измерительных точек Y1-3, его величина состоит из суммы Y1-3=h1-3+Xeff, где Xeff - расстояние от торца погружных датчиков локальной скорости до измерительной точки, для погружных датчиков локальной скорости, Xeff=2 мм, эти геометрические параметры хранят в памяти вычислительного блока;
причем выходы катушек погружных датчиков локальной скорости подсоединены через формирователи тока, датчики тока к выходам, то есть положительным полюсам многоканального блока питания катушек, запитаного от промышленной сети переменного напряжения; выход, то есть отрицательный полюс многоканального блока питания катушек, соединен с отрицательным полюсом устройства в точке Б, другой выход многоканального блока питания через датчик тока на основе опорного прецизионного резистора и пассивного фильтра на чип-резисторах, формирователь тока подсоединен к входу катушки, управляющие выходы микроконтроллера g1 и g2 подсоединены к ключам К1 и К2 формирователя тока, причем выход датчика тока подсоединен к входу переключателя; причем защищают цепь электродов и входную цепь предварительного усилителя от проникновения внешних электромагнитных помех, от синфазных помех и земляных токов устройства, для этого общую шину устройства в точке Б электрически изолируют от местного защитного заземления в точке В, при этом защитные корпуса первичных преобразователей сигналов в точке В соединены с местным защитным заземлением в точке з;
причем отрицательные полюсы раздельного многоканального и автономного блоков питания постоянного тока соединены с отрицательным полюсом общей шины питания устройства в точке Б, причем отрицательный полюс общей шины питания устройства в точке Б электрически изолирован от местного защитного заземления в точке В, защитные корпуса преобразователей первичных сигналов в точке В соединены с местным защитным заземлением в точке з; причем микропроцессор взаимодействует с микроконтроллерами трех первичных преобразователей сигналов путем их опроса и подачи команд управления, а оператор подает команды микропроцессору через кнопочную четырехклавишную клавиатуру, считывает информацию с индикатора и запоминает в блоке памяти вычислительного блока.
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| В.И | |||
| Лачков, СПб, Политехника, 2002 г., стр | |||
| СПОСОБ ДЛЯ РАДИОСНОШЕНИЙ С ПОЕЗДАМИ | 1922 |
|
SU397A1 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 2005 |
|
RU2295706C2 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 2011 |
|
RU2489684C1 |
| Аппарат для определения быстроты оседания эритроцитов | 1927 |
|
SU12240A1 |

