ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области перцептивно-когнитивного тренинга. В частности, настоящее изобретение относится к системе и способу перцептивно-когнитивно-моторного обучения.
УРОВЕНЬ ТЕХНИКИ
[0002] В процессе своей ежедневной деятельности люди постоянно взаимодействуют с окружающей их средой. Данная окружающая среда является динамической и требует интеграции различных объектов, движений, скоростей, местоположений и т.п. В результате, исполнительные функции головного мозга постоянно управляют большим числом стимулов. Во многих реальных жизненных ситуациях присутствует риск перегруженности информацией. Способность быстро справляться с непредсказуемостью стимулов в ситуациях, критичных по времени, необходима в реальных условиях в офисе, спорте, школе и в ситуациях кризисного управления.
[0003] Внимание и фокусировка на стратегических входных данных может иметь значение для победы и поражения в спортивной деятельности, при обучении новым навыкам, в опасных ситуациях и при осуществлении успешной профессиональной карьеры. Внимание и фокусировка, особенно в напряженных ситуациях, позволяют фильтровать и определять приоритеты данных, с отбрасыванием, при этом, посторонних отвлекающих факторов.
[0004] В случае пожилых людей или лиц с некоторыми нарушениями здоровья, недостаток внимания и фокусировки может создавать серьезные проблемы при обычной деятельности. Например, движение через толпу с избеганием столкновений и поддержкой ориентации и хорошей регуляцией моторики требует быстрой и непрерывной перцептивно-когнитивной обработки данных. Как достаточно подтверждается документами, влияние естественного процесса старения может влиять на перцептивно-когнитивные процессы.
[0005] Потеря внимания и нарушение импульсного контроля может быть серьезной проблемой для детей с синдромом дефицита внимания, с гиперактивностью или без нее, и для детей с аутическим расстройством.
[0006] Поэтому у разных лиц существует потребность в повышении внимания и фокусировке. Данная потребность имеется в наличии, в частности, у лиц с нарушениями обучаемости или с деградирующими когнитивными функциями. Данная потребность также имеется в наличии у профессиональных спортсменов, которые должны «прогнозировать игру», при одновременном слежении за траекторией мяча, и у многих специалистов, которые должны справляться с большими объемами информации.
[0007] Следовательно, существует потребность в решениях, которые помогают улучшить когнитивные функции для детей, имеющих нарушения обучаемости, пожилых людей, спортсменов или специалистов, действующих в стрессогенных окружающих условиях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] В соответствии с настоящим изобретением предлагается система перцептивно-когнитивно-моторного обучения. Система содержит устройство для оценки или совершенствования перцептивно-когнитивных способностей субъекта во время последовательных тестов. Устройство содержит дисплей, сконфигурированный с возможностью предоставления субъекту зрительного контакта с окружающей средой. Система содержит также средство для консолидации результатов первых последовательных тестов, выполненных с использованием единственной пространственной зоны, сформированной окружающей средой, средство для сегментации окружающей среды на множество пространственных зон и средство для консолидации результатов вторых последовательных тестов, выполненных с использованием множества пространственных зон.
[0009] В соответствии с настоящим изобретением предлагается также система перцептивно-когнитивно-моторного обучения. Система содержит устройство для оценки или совершенствования перцептивно-когнитивных способностей субъекта во время последовательных тестов. Устройство содержит дисплей, сконфигурированный с возможностью предоставления субъекту зрительного контакта с окружающей средой. Система содержит также контроллер последовательности тренинга. Контроллер последовательности тренинга сконфигурирован с возможностью консолидации результатов первых последовательных тестов, выполненных с использованием единственной пространственной зоны, сформированной окружающей средой, сегментации окружающей среды на множество пространственных зон и консолидации результатов вторых последовательных тестов, выполненных с использованием множества пространственных зон.
[0010] Настоящее изобретение относится также к способу оценки или совершенствования перцептивно-когнитивных способностей субъекта. Субъект подвергается воздействию последовательности тренинга. Последовательность тренинга включает в себя множество последовательных тестов, представляемых субъекту в окружающей среде. Результаты первых последовательных тестов, выполненных с использованием единственной пространственной зоны, сформированной окружающей средой, консолидируются. Окружающая среда сегментируется на множество пространственных зон. Результаты вторых последовательных тестов, выполненных с использованием множества пространственных зон, консолидируются.
[0011] Вышеприведенные и другие признаки будут понятнее после прочтения нижеследующего не ограничивающего описания наглядных вариантов осуществления, приведенных только для примера со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0012] Варианты осуществления изобретения описаны ниже только для примера, со ссылкой на прилагаемые чертежи, на которых:
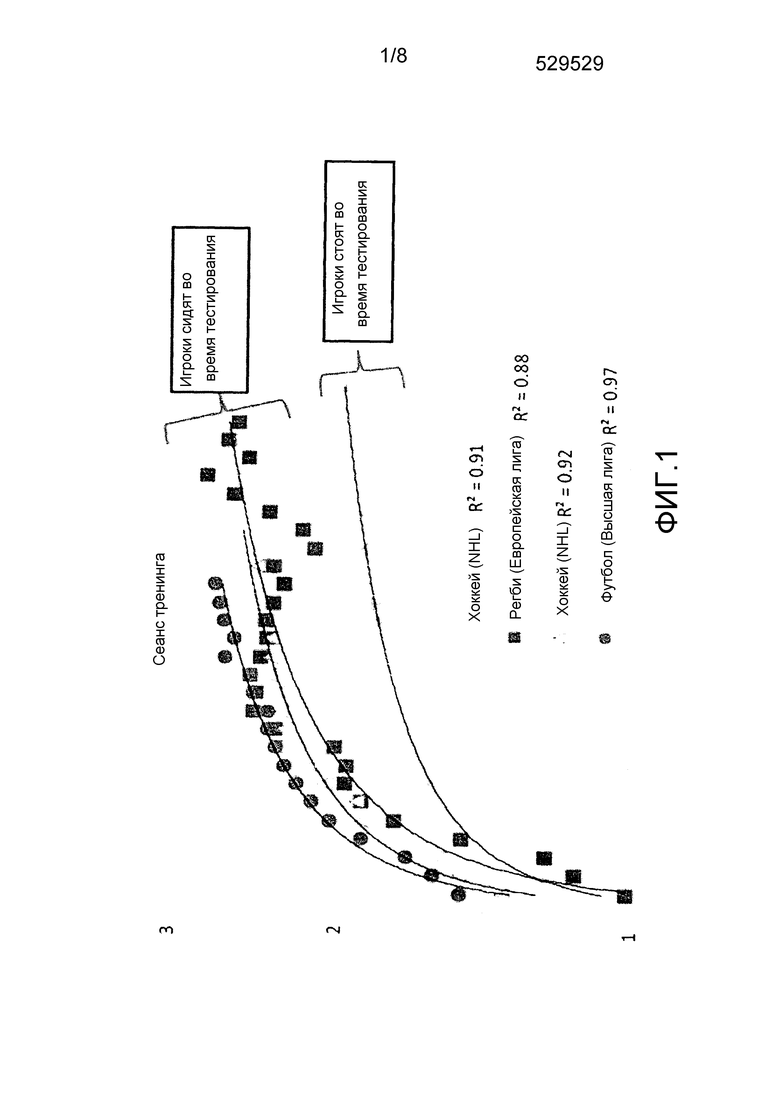
[0013] Фигура 1 - график, представляющий кривые обучения спортсменов, помещенных в жесткий режим тренировки.
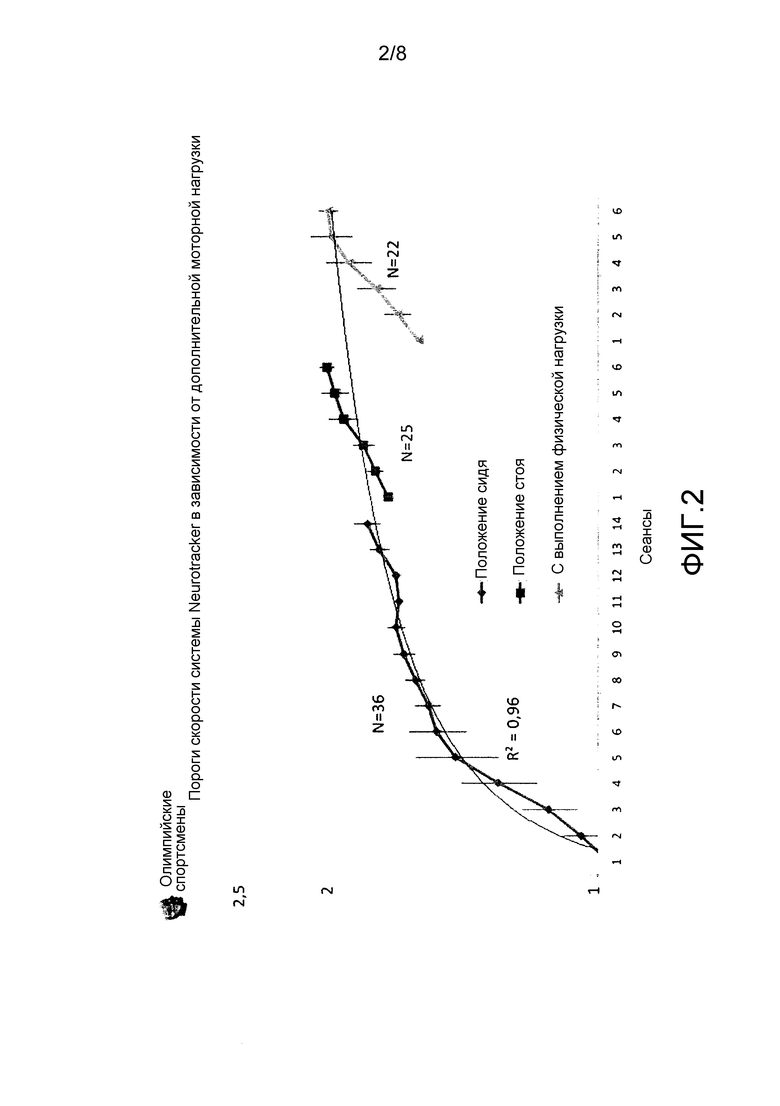
[0014] Фигура 2 - график, представляющий кривые обучения спортсменов, помещенных в жесткий режим тренировки, при использовании перцептивно-когнитивно-моторной системы.
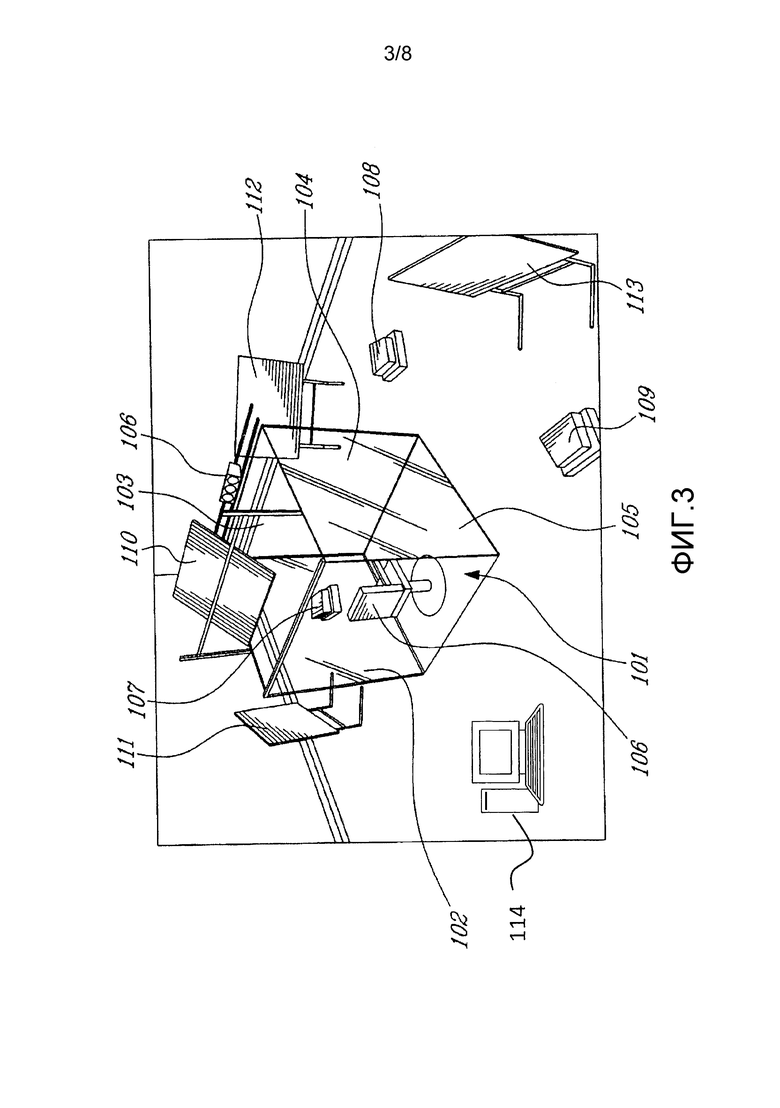
[0015] Фигура 3 - вид в перспективе примера виртуальной окружающей среды с полным погружением.
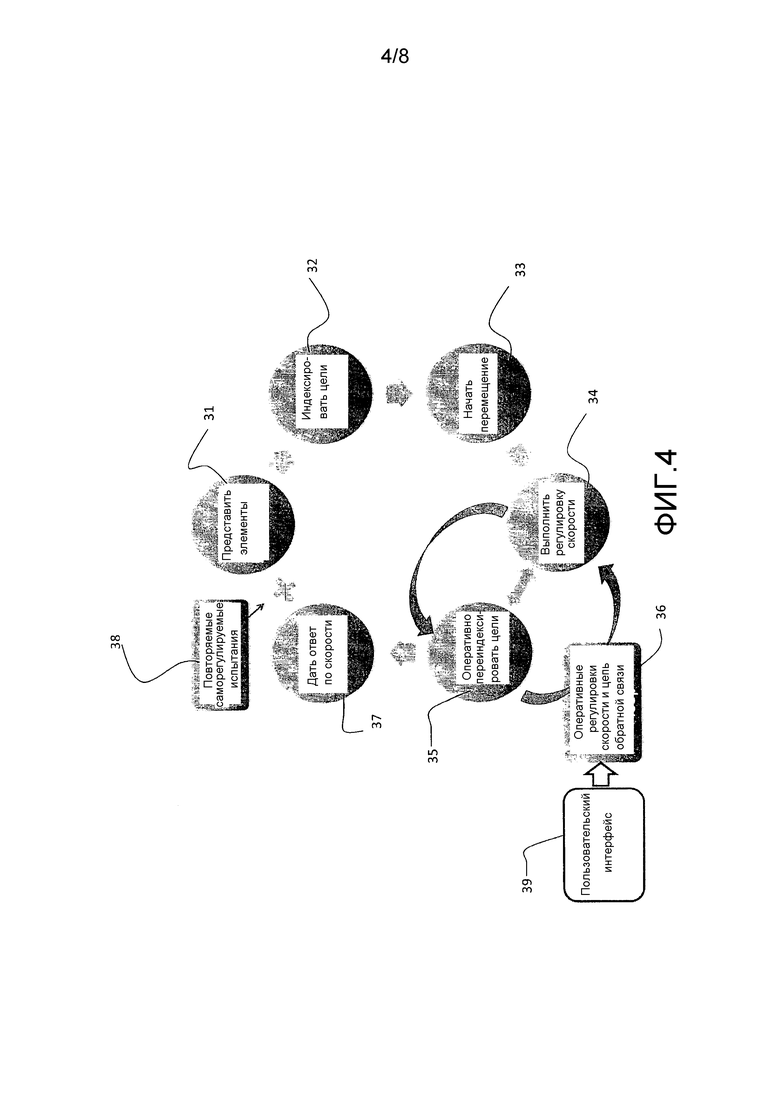
[0016] Фигура 4 - схема, поясняющая саморегулируемый режим тренировки.
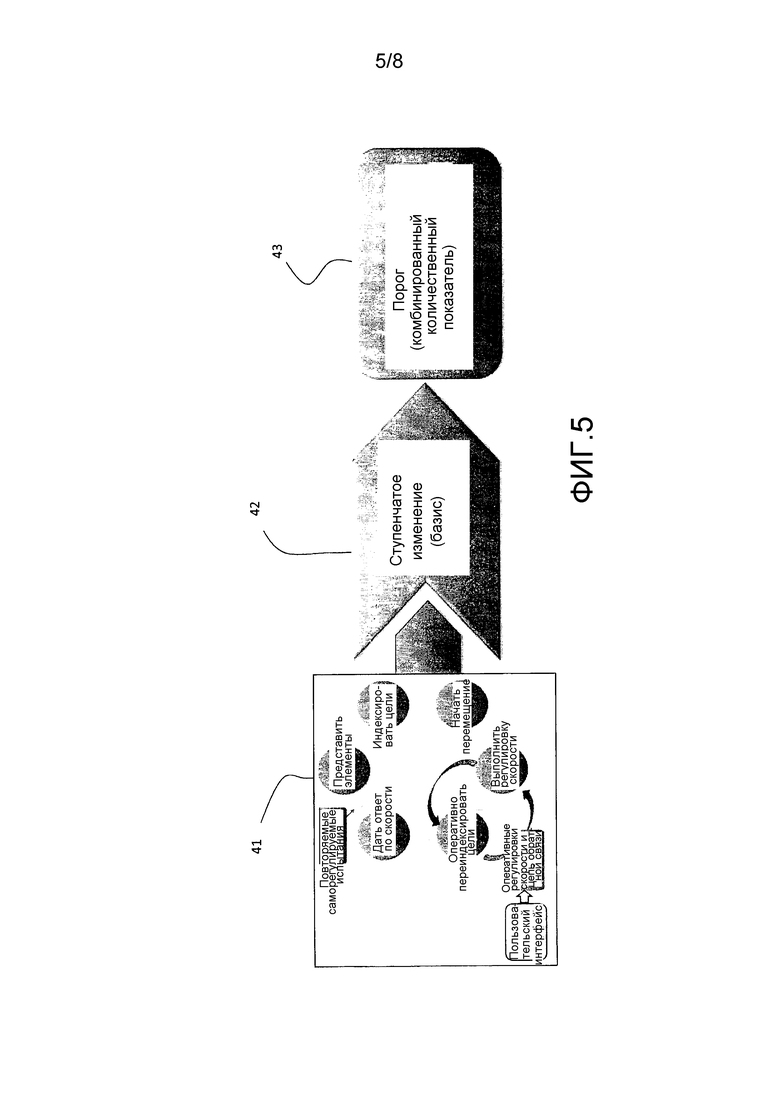
[0017] Фигура 5 - схема, поясняющая саморегулируемый режим оценки, включающий в себя саморегулируемый режим тренировки, показанный на фигуре 4, и дополнительное использование ступенчатого (вверх и вниз) изменения скоростей.
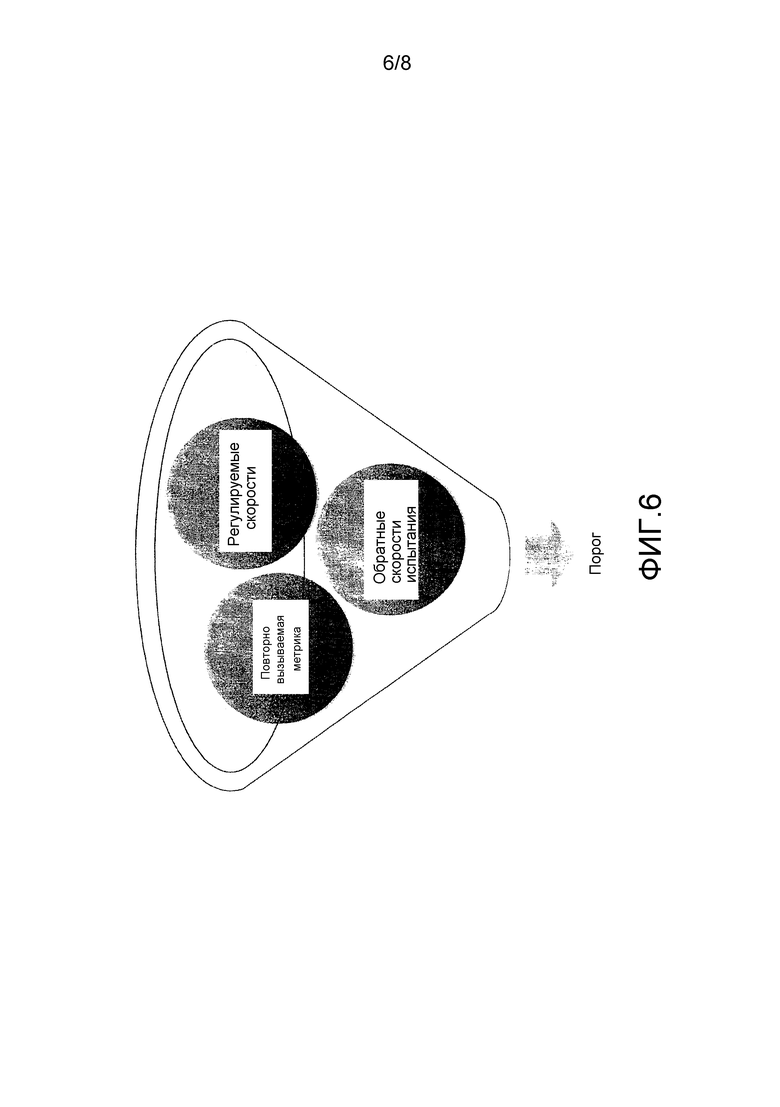
[0018] Фигура 6 - схема, поясняющая использование нескольких мер для определения порогов скоростей.
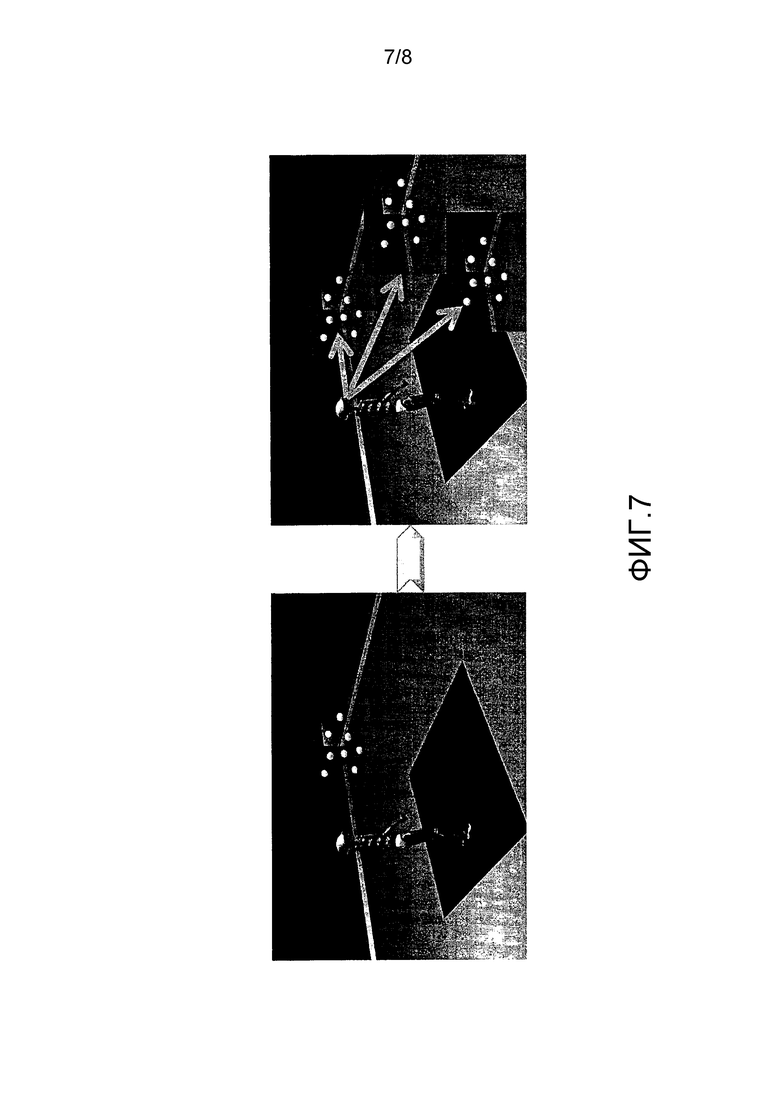
[0019] Фигура 7 поясняет сегментацию сцены на множество пространственных зон.
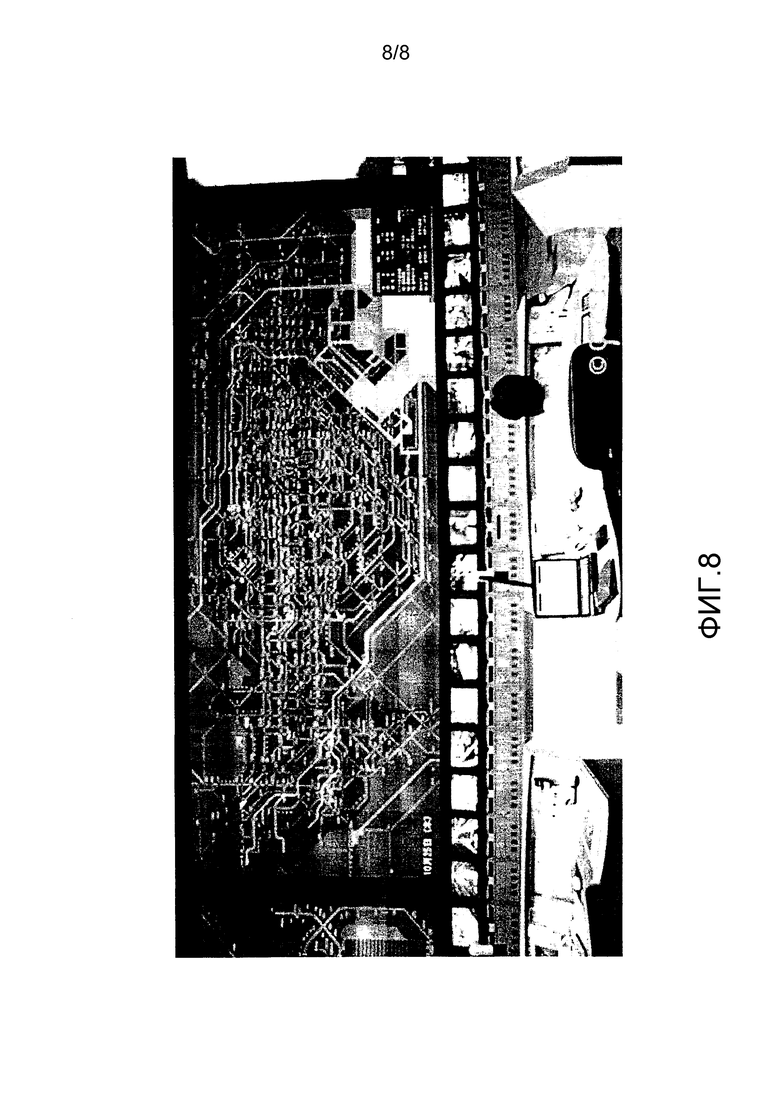
[0020] Фигура 8 изображает зал управления дорожным движением в Токио, формирующий сегментированное распределение сцены.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Одинаковые числовые позиции представляют одинаковые признаки на различных чертежах.
[0022] Различные аспекты настоящего изобретения решают, как правило, одну или более из проблем улучшения когнитивных функций.
[0023] Нижеследующее описание раскрывает не ограничивающий, наглядный вариант осуществления системы NeuroTracker для «перцептивно-когнитивно-моторного» обучения (NT-LS). В частности, описаны три (3) следующих признака системы NT-LS:
[0024] 1 - Система NeuroTracker (NT) с моторным дополнением, в которой моторные дополнения сделаны в конкретных условиях для оптимизированного обучения.
[0025] 2 - «Саморегулируемые» система и способ для быстрой оценки индивидуальных порогов.
[0026] 3 - Предложение новой общей концепции NT-LS. В частности, показано, каким образом можно изменять масштаб NT-LS для постепенного повышения значимости тренинга в полевых условиях для спорта и для любой ситуации принятия решения в чрезвычайной ситуации и/или кризисного управления.
1 - СИСТЕМА NT С МОТОРНЫМ ДОПОЛНЕНИЕМ
[0027] Спортивные качества (относящиеся также к обычным жизненным ситуациям типа навигации в толпе) включают в себя способность быстро обрабатывать комплексное перемещение по большим зонам и в трехмерной (3D) окружающей среде, в том числе, резкие изменения по направлениям и столкновения и, в то же самое время, уделять внимание ключевым элементам сцены, т.е. в окружающей среде. Информация из сцены интегрируется с конкретными требованиями к моторике в спорте или с реальными требованиями, подобными навигации в толпе. Другими словами, люди воспринимают и понимают, что происходит в их окружающей среде, при одновременном физическом взаимодействии с окружающей средой путем конкретных действий. Существуют данные, подтверждающие существование специализированных высших зрительных систем, в которых некоторые пути отвечают за восприятие, и некоторые отвечают за действие. Хотя данные специализированные высшие зрительные системы для восприятия и для действия содержат отличительные элементы, они, в конечном счете, объединяются.
[0028] На основании научных данных полагают также, что зрение для системы восприятий является более сложным и эволюционно более поздним, чем зрение для системы действий.
[0029] Конечный перенос и замыкание сенсорного-перцептивного-когнитивного-моторного контура включает в себя путь для объединения всех вышеприведенных способностей в тренинге. Желательно также выделить и консолидировать данные способности и затем объединить их во время тренинга. Настоящее изобретение предлагает тренинг в системе NT-LS для построения упомянутой консолидации, так как она предусматривает более сложную зрительную систему восприятия и, после консолидации, замыкает визуальный-перцептивный-когнитивный-моторный контур с моторными задачами, интегрированными с системой NT.
1A) ДАННЫЕ В ПОЛЬЗУ НЕОБХОДИМОСТИ ПРОЦЕССА КОНСОЛИДАЦИИ
[0030] Первоначальное исследование показало, что требование к дополнительной моторике в начале жесткого режима перцептивно-когнитивного тренинга может причинить вред в фазе сбора данных. Фигура 1 является графиком, показывающим кривые обучения спортсменов, помещенных в жесткий режим тренинга. График показывает, что требование к дополнительной моторике в начале жесткого режима перцептивно-когнитивного тренинга может причинить вред фазе сбора данных субъектом. На основании тренинга профессиональных спортсменов высокого уровня выяснилось, что, если игроки обучались задаче, стоя с начала, то их уровни эффективности функционирования были ниже, и их кривые обучения были более пологими. Чтобы лучше понять вышесказанное, после первоначального исследования выполнили эксперимент для оценки переносимости тренинга, при выполнении консолидации вначале после добавления моторной нагрузки к тренингу. Под переносимостью понимается, что польза для обучения в одном состоянии сохраняется в другом состоянии. Результаты данного исследования показаны на фигуре 2, которая является графиком, представляющим кривые обучения спортсменов, помещенных в жесткий режим тренинга, при использовании перцептивно-когнитивно-моторной системы. Данный график показывает, что, после консолидации, когда субъект сидит, наблюдаются очень малые потери эффективности функционирования в положении стоя, и что, хотя имеет место большое начальное снижение физического состояния, спортсмены быстро восстанавливают свои способности скоростной обработки данных и возвращаются обратно на свою обычную кривую обучения в «сидячем» положении. Первые 14 сеансов тренинга показывают обычное совершенствование скорости способности обработки данных в сидячем положении, после чего идут следующие шесть сеансов со спортсменами в стоячем положении, за которыми следуют последние шесть сеансов тренинга с атлетами, сидящими на балансировочном мяче Bosu™ в положении, которое затрудняет сохранение равновесия. Как можно наблюдать из фигуры 2, после консолидации (сидения) наблюдается очень малая потеря эффективности функционирования в положении стоя, что доказывает возможность переноса. Хотя вначале имеет место большое снижение в третьем состоянии (при физическом упражнении; сидя на мяче Bosu™), спортсмены быстро восстанавливают свои способности скоростной обработки данных и возвращаются обратно на свою обычную кривую обучения в «сидячем» положении.
1B) ЗАМЫКАНИЕ КОНТУРА
[0031] Настоящий раздел описывает способ и систему для замыкания визуального-перцептивного-когнитивного-моторного контура для оптимальной эффективности функционирования и объединения технологии NT с объективной мерой системы визуально-моторного функционирования. Субъекту предлагается последовательность тренинга по следующей схеме:
[n1(БАЗИС); n2(БАЗИС+МОТОРИКАa); n3(БАЗИС+МОТОРИКАb)].
[0032] Последовательность тренинга содержит n1 повторений базисного упражнения, за которыми следуют n2 повторений базисного упражнения, выполняемого в связи с первым (обычно легким) требованием к моторике, после чего следуют n3 повторений базисного упражнения, выполняемого в связи со вторым (обычно, более тяжелым) требованием к моторике. В общем, значения n1, n2 и n3 являются неотрицательными целыми величинами.
[0033] В качестве не ограничивающего примера, тренинг может выполняться с использованием устройства, подобного описанному в патентной заявке PCT № PCT/CA2009/001379, поданной 29 сентября 2009 г. Фобертом с соавторами (Faubert et al.), и опубликованной 8 апреля 2010 г. под № WO 2010/037222 A1 (в последующем «Faubert'222»), содержание которой в полном объеме включено в настоящую заявку путем отсылки.
[0034] Устройство, предложенное в заявке Faubert'222, можно использовать для оценки или совершенствования перцептивно-когнитивных способностей субъекта. Устройство содержит дисплей виртуальных объектов, перемещающихся в заданной 3D окружающей среде во время последовательных тестов. Фигура 3 является видом в перспективе примера виртуальной окружающей среды с полным погружением. В частности, дисплей содержит помещение 101 виртуальной окружающей среды с полным погружением (FIVE), например, автоматическую виртуальную окружающую среду CAVE™ компании Fakespace Systems, в которой происходит полное погружение субъекта в заданную 3D окружающую среду, и представляются стимулы. Помещение 101 виртуальной окружающей среды с полным погружением имеет размеры, например, 8×8×8 футов (2,44×2,44×2,44 м) и содержит четыре (4) проекционных поверхности (три стенки 102, 103 и 04 и пол 105). Дисплей представляет стереоскопические изображения на четырех (4) проекционных поверхностях (трех стенках 102, 103 и 104 и полу 105) для формирования заданной 3D окружающей среды, в которой представляются виртуальные объекты. Дисплей содержит, с данной целью, проекторы 106, 107, 108 и 109 и сопровождающие плоские отражатели 110, 111, 112 и 113, соответственно, для проекции и отображения изображений на четырех (4) проекционных поверхностях (трех стенках 102, 103 и 104 и полу 105) под управлением компьютера 14, действующего как контроллер дисплея. Для упрощения, соединения между компьютером 114 и другими элементами помещения 101 FIVE не показаны. Компьютер 114 может быть связан с различными проекторами 106, 107, 108 и 109 и другими сетевыми элементами с помощью общеизвестных способов соединения.
[0035] Дисплей устройства для оценки или совершенствования перцептивно-когнитивных способностей субъекта содержит также зрительное приспособление затвора, например, в форме стереоскопических очков (не показанных) с жидкокристаллическим затвором компании Stereographies, San Rafael, CA, чтобы допускать 3D стереоскопическое восприятие субъектом, в частности, чтобы допускать восприятие субъектом виртуального объекта в 3D, положений виртуальных объектов и 3D окружающей среды. Стереоскопические изображения визуализируются с частотой обновления 48 Гц, и очки перекрываются с частотой 96 Гц для представления 48 изображений в секунду для правого и левого глаз субъекта. Дисплей дополнительно содержит позиционный датчик, например, в форме магнитного детектора, например, Flock of Birds™ компании Ascension technology corp., Burlington, VT, закрепленный на очках, чтобы отслеживать положение головы субъекта. Компьютер 114 управляет дисплеем для коррекции в реальном времени зрительной перспективы относительно положения головы отслеживаемого субъекта. Контроллер дисплея (например, компьютер «Silicon graphics 540») генерирует стимулы и записывает реакции субъекта.
[0036] Офтальмологическое кресло 106, расположенное, по существу, в центральном положении помещения 101 FIVE, обеспечено для сидения субъекта.
[0037] Следовательно, устройство, предложенное в заявке Faubert'222, можно использовать при поддержке способа для оценки или совершенствования перцептивно-когнитивных способностей субъекта. В общих словах, данное устройство содержит дисплей виртуальных объектов, перемещающихся в заданной 3D окружающей среде во время последовательных тестов, при этом субъект имеет зрительный контакт с виртуальными объектами, перемещающимися в 3D окружающей среде. Компьютер 14 управляет проекторами 106, 107, 108 и 109 для изменения скорости перемещения виртуальных объектов в 3D окружающей среде. Во время каждого теста субъект отслеживает поднабор движущихся виртуальных объектов, и после теста субъект идентифицирует отслеживаемые объекты. Следует помнить, что тренинг и другие функции, раскрытые в настоящей заявке, могут в качестве альтернативы выполняться с использованием любого другого подходящего устройства.
[0038] БАЗИС представляет тест, содержащий 6-8-минутную последовательность тестирования с использованием устройства, подобного описанному в заявке Faubert'222.
[0039] БАЗИС+МОТОРИКАa представляет тест, содержащий низкоуровневую простую моторную нагрузку, дополнительную к тесту БАЗИС. Это может быть положение стоя субъекта, но может быть также упражнение на велосипеде, или только удерживание на перекладине или на тредбане на обычных или роликовых коньках. Это означает, что тест БАЗИС+МОТОРИКАa калибруется так, чтобы отсутствовал эфферентный сигнал (команда головного мозга на перемещение) из головного мозга на перемещение конечностей по осмысленной схеме, например, бега, бега на коньках или перехвата мяча.
[0040] БАЗИС+МОТОРИКАb представляет тест на один уровень выше, при этом нагрузка МОТОРИКИb тяжелее, чем нагрузка МОТОРИКИa. Во время теста БАЗИС+МОТОРИКАb, субъект получает запрос объединить БАЗИС с конкретным требованием к моторике, которое адаптировано к заданной реальной жизненной ситуации, например, спорту, работе машины или транспортного средства, опасной ситуации или любой другой подобной цели. На тип ситуации, которую можно представлять во время теста БАЗИС+МОТОРИКАb, не налагается никакого априорного предела.
[0041] Контроллер последовательности тренинга, встроенный в компьютер 114 или в отдельный компьютер (не показанный), управляет устройством, как в заявке Faubert'222, чтобы выполнять последовательность тренинга. К субъекту и контроллеру последовательности тренинга могут быть также подсоединены датчики для контроля перемещений субъекта во время каждого теста, в частности, перемещений, относящихся к движению дополнений МОТОРИКИa и МОТОРИКИb.
[0042] В соответствии с примером варианта осуществления, учитывающим имеющиеся собранные научные данные, выполняется следующая последовательность тренинга под управлением контроллера последовательности тренинга:
[n1(БАЗИС); n2(БАЗИС+МОТОРИКАa); n3(БАЗИС+МОТОРИКАb)],
[0043] где:
[0044] n1=10-15 повторений;
[0045] n2=6 повторений; и
[0046] n3=6 повторений.
[0047] В частности, контроллер последовательности тренинга управляет устройством, подобным описанному в заявке Faubert'222, для выполнения, в последовательности, серии из от 10 до 15 БАЗИСНЫХ тестов, серии из 6 тестов БАЗИС+МОТОРИКАa, и серии из 6 тестов БАЗИС+МОТОРИКАb. После каждого теста компьютер 114 собирает реакции субъекта по идентификации отслеживаемых виртуальных объектов (например, сфер) посредством интерфейса реакций, например, клавиатуры с дисплеем компьютера 114, для дополнительного анализа данных реакций, например, анализа, подобного описанному в вышеупомянутой заявке Faubert'222, потенциально, в комбинации с анализом перемещений субъекта во время тестов в случае тестов БАЗИС+МОТОРИКАa и БАЗИС+МОТОРИКАb, чтобы определять развитие субъекта. Данный анализ последовательности тренинга может ограничиваться отслеживанием графиков или может быть намного более сложным, в зависимости от требований предполагаемого применения.
[0048] С использованием вышеприведенного примера исполнения (n1=10-15 повторений, n2=6 повторений, и n3=6 повторений), можно повысить моторные навыки с помощью способа, основанного на научных данных, и адаптировать его к любой спортивной или восстановительной тренировке. Например, нетрудно представить человека, который испытал инсульт и стал испытывать проблемы с ходьбой, и нуждается в постепенной реабилитации с использованием данного способа, в котором МОТОРИКАb становится ходьбой на тредбане. Ниже приведено также несколько примеров МОТОРИКИb:
[0049] Рэгби: Ловля поперечного паса;
[0050] Хоккей: Получение паса и бросок шайбы или останов шайбы для вратаря;
[0051] Футбол: получение и перенаправление мяча;
[0052] И т.п.
2 - «САМОРЕГУЛИРУЕМАЯ» СИСТЕМА И СПОСОБ
[0053] Саморегулируемая система и способ предназначены для решения некоторых проблем пользователями (субъектами) системы NT-LS. Данные проблемы содержат:
[0054] Метод получения порогов скоростей быстрее, чем при обычном 6-8-минутном БАЗИСНОМ тесте в таких ситуациях, как тестирование в комбинациях (набор юношеских команд), высокая производительность и т.п.
[0055] Метод поддержки активности субъекта во время теста, даже если субъект потерял ход отслеживания виртуальных объектов (смотри устройство, описанное в заявке Faubert'222). Классический БАЗИСНЫЙ тест настраивается так, чтобы, если субъект потерял один или более из отслеживаемых объектов, то возможности восстановиться или начать заново не имелось бы во время теста, который длится 6-8 секунд. Субъект ожидает окончания, дает ответ и начинает снова.
[0056] Саморегулируемая система и способ решают приведенные проблемы посредством предоставления субъекту возможности оставаться активным и выполнять несколько задач самостоятельно и интерактивно с динамической зрительной сценой. Существуют также две версии саморегулируемой системы и способа, режима тренинга и режима оценки (измерения), хотя данные две версии обычно не являются взаимно исключающими.
[0057] Как показано на фигуре 4, которая является схемой, иллюстрирующей саморегулируемый режим тренинга, типичный БАЗИСНЫЙ тест работает следующим образом. В соответствии с управлением контроллера последовательности тренинга, дисплей устройства, подобный описанному в заявке Faubert'222, представляет субъекту несколько виртуальных объектов (обычно 8 сфер), как видно на этапе 31 на фигуре 4. Затем контроллер последовательности тренинга индексирует поднабор (обычно 4 сферы, представляющие целевые объекты) посредством изменения цвета или мигания и т.п. (этап 32 на фигуре 4). Затем объекты возвращаются в их первоначальное состояние. Затем контроллер последовательности тренинга начинает перемещение объектов в 3D окружающей среде, как показано на этапе 33 фигуры 4. Как только перемещение объектов начинается, субъект может использовать пользовательский интерфейс 39, который имеет функциональное соединение с компьютером 114, чтобы выполнять следующие регулировки:
[0058] Саморегулируемый режим тренинга: В данном случае субъект может отдавать команды, направленные контроллеру последовательности тренинга через пользовательский интерфейс 39, чтобы выполнять следующие действия:
[0059] Управление скоростью, т.е. предписывать виртуальным объектам в динамической 3D окружающей среде двигаться быстрее или медленнее по желанию, посредством нажатия кнопок или выдачей некоторых команд, например, голосовых команд, удаленному модулю (не показанному), или посредством физического жеста, детектируемого устройством ввода данных о движении (не показанным), например, перемещением рук вверх и вниз или разведением в стороны или сведением рук. Удаленный модуль или устройство ввода данных о движении подключен(о) к компьютеру 114, который включает в себя контроллер последовательности тренинга (этапы 34 и 36 на фигуре 4).
[0060] Допуск установки в начальное состояние, сброса или повторной индексации целевых объектов в любой момент времени во время слежения и на любой требуемый промежуток, вплоть до некоторого предела (этап 35 на фигуре 4).
[0061] В любой момент времени во время теста, субъект может указать нажатием кнопки удаленного модуля или с помощью любой другой команды, что данная скорость виртуальных объектов является правильной скоростью слежения (этап 37 на фигуре 4). В частности, когда субъект ощущает, что скорость является правильной, и он может обеспечивать слежение за целевыми объектами с данной скоростью, в таком случае субъект нажимает кнопку удаленного модуля и выбранная скорость автоматически принимается и записывается компьютером 114. В качестве альтернативы или в дополнение, электроэнцефалографические (ЭЭГ) датчики (не показанные), имеющие функциональное соединение с компьютером 114, могут обнаруживать электроэнцефалограммы субъекта. Компьютер 114 может анализировать электроэнцефалограммы, чтобы определять, когда субъект теряет фокусировку и больше не способен обеспечивать слежение за целевыми объектами. Компьютер 114 может, например, определять, что правильная скорость является предыдущая (меньшая) скорость до потери обнаружения фокусировки. Когда субъект нажимает кнопку, или на основании обнаружения из датчиков ЭЭГ, цели обновляются, и когда кнопка отпускается, или когда датчики ЭЭГ показывают, что электроэнцефалограммы перефокусируются, индексация прекращается, а перемещение продолжается. Данное обновление можно повторять любое число раз (этап 38 на фигуре 4). То есть, один субъект может тренироваться столько времени, сколько пожелает посредством обеспечения команд управления в цепи обратной связи в саморегулируемую систему. Субъект может продолжать с использованием способа без установки в исходное состояние или может иметь столько перерывов, сколько пожелает.
[0062] В зависимости от типа регулировки, выполняемой субъектом в саморегулируемом режиме тренинга, пользовательский интерфейс 39 может содержать одну или более кнопок, микрофон, подключенный к детектору речевого сигнала (не показанному), устройству ввода данных о движении, клавиатуре, педальной клавиатуре любого другого человеко-машинного интерфейса.
[0063] Саморегулируемый режим оценки: Фигура 5 является схемой, поясняющей саморегулируемый режим оценки, включающий в себя саморегулируемый режим тренинга, показанный на фигуре 4, и дополнительное использование ступенчатого (повышения и снижения) изменения скоростей. Саморегулируемый режим оценки включает в себя операции саморегулируемого режима тренинга (этап 41 на фигуре 5), за исключением того, что данный режим имеет следующую дополнительную операцию (этап 42 на фигуре 5):
[0064] Когда на этапе 41 завершено предварительно установленное число регулировок скорости, контроллер последовательности тренинга автоматически выполняет предварительно установленное число тестов с использованием укороченного ступенчатого (вверх и вниз) изменения скоростей, например, использованного для БАЗИСНОГО теста и описанного для устройства в соответствии с заявкой Faubert'222. Данная процедура гарантирует, что субъективные регулировки скорости, выполняемые субъектом или выполняемые на основе обнаружений датчиков ЭЭГ, действительно соответствуют объективно найденным пороговым значениям скорости (этап 42 на фигуре 5).
[0065] «Саморегулируемая» система и способ имеют следующие характеристики:
[0066] 1) Они могут быть высокоскоростными;
[0067] 2) Они являются очень гибкими с точки зрения обеспечения различных времен тренинга;
[0068] 3) Они позволяют субъекту оставаться в «зоне» максимальной обучаемости, где имеет место правильный уровень сложности для любого субъекта в любое заданное время; и
[0069] 4) Они помогают развить способность субъекта распознавать собственное внутреннее психическое состояние и реагировать на него посредством выполнения соответствующих регулировок.
[0070] Саморегулируемая система и способ не только оценивают пороги скоростей (этап 43 на фигуре 5) посредством вычисления данных реакций и результатов ступенчатого изменения скорости (этап 42 на фигуре 5), когда используется саморегулируемый режим оценки, но также позволяют компьютеру 114 выполнять несколько мер, полезных при определении порогов скоростей одновременно с участием субъекта, например:
[0071] a) Несколько повторных вызовов целей (число повторений саморегулируемых испытаний);
[0072] b) Время каждого повторного вызова (частота повторений саморегулируемых испытаний); и
[0073] c) Значения скоростей во время саморегулируемых повторных вызовов.
[0074] Это показано на фигуре 6, которая является схемой, поясняющей использование нескольких мер для определения порогов скоростей, и может применяться для разработки профилей реакций и профилей обучения для каждого субъекта.
[0075] Протестирована эффективность саморегулируемого режима оценки для определения, может ли данный режим формировать результаты, аналогичные БАЗИСНОМУ тесту для первоначальной стадии «консолидации». Во время теста, субъекты использовали саморегулируемый режим оценки (2 регулировки и 6 ступенчатых испытаний) для первых 4 сеансов тренинга, с последующей стандартной мерой оценки по БАЗИСУ на 5-ом сеансе, после чего следовали другие 4 саморегулируемых сеанса оценки, с последующим БАЗИСНЫМ сеансом на 10-ом сеансе и т.п. Как было установлено, количественные оценки 5-го, 10-го и 15-го БАЗИСНЫХ сеансов достаточно точно соответствовали саморегулируемой количественной оценке, что указывает на возможность использования саморегулируемого режима оценки для получения сходных результатов, но за намного более короткое время, т.е. за 3 минуты вместо 6-8 минут с БАЗИСНЫМ тестом.
3 - ОБЩАЯ КОНЦЕПЦИЯ СИСТЕМЫ NT-LS
[0076] В следующей секции представлена общая концепция системы NT-LS. Система NT-LS включает в себя протокол для установления схемы обучения, адаптированной для любой ситуации, которая требует быстрых решений, когда контролируется несколько источников информации. Как выражено в вышеприведенном описании моторных дополнений, консолидация выполняется до дополнительного введения функциональных нагрузок, например, разных уровней перцептивно-моторных навыков. То же самое справедливо в отношении добавления других когнитивных нагрузок, например, особенности сцены и контекстуальной информации, которая эволюционирует в направлении примеров схем игры в спорте или отработкам действий при эвакуации в ситуациях кризисного управления, например, при аварийных эвакуациях. Особенность сцены и контекстуальная информация могут относиться к стадионам, зданиям, железнодорожным станциям и станциям метрополитена, аэропортам, самолетам, судам, больницам, школам или любому физическому пространству, в котором одновременно имеют место множество событий и/или решений. Система NT-LS допускает развитие способности быстрого принятия решений у людей, которые сталкиваются с необходимостью принятия важных решений в ограниченное время.
[0077] Система NT-LS использует вышеописанный процесс консолидации порогов скоростей и основан на возрастающих когнитивных нагрузках, при одновременной поддержке протоколов порогов скоростей. В следующих параграфах, для иллюстрации будет использоваться американский футбол в качестве не ограничивающего примера. В данном примере, квотербэк должен, в конечном счете, обрабатывать разные целевые зоны, которые включают в себя хавбэков, принимающих игроков, третьих крайних и других игроков, чтобы отдать хороший пас. Квотербэк сначала обрабатывает ближнюю зону и затем расширяет свою способность отслеживать несколько элементов по зонам. Система NT-LS может работать следующим образом:
[0078] Фаза 1: Развитие способности субъекта обрабатывать сегментированное распределение сцены. Как показано на фигуре 7, которая показывает сегментацию сцены на множество пространственных зон. Левая сторона фигуры 7 представляет 3D сцену. Правая сторона фигуры 7 представляет ту же самую 3D сцену после сегментации на три (3) пространственных зоны. В примере на фигуре 7, пространственные зоны состоят из отдельных объемных (3D) пространств, показывающих движущиеся объекты. Сегментация может осуществляться по меньшему или большему числу пространственных зон. Контроллером последовательности тренинга выполняются следующие операции:
[0079] Консолидация по 12-15 сеансам тренинга. Консолидация может использовать БАЗИСНЫЙ или саморегулируемый режим оценки.
[0080] Разделение (сегментация) отслеживания на две пространственные зоны. Например, вместо использования первоначальной особой зоны для тренинга, несколько элементов, подлежащих отслеживанию, можно разделить так, чтобы каждая отдельная пространственная зона содержала некоторые из элементов, включая небольшое число целей, как показано с правой стороны фигуры 7.
[0081] Новая консолидация обратно к первоначальным опорным значениям (например, геометрической средней скорости последних трех (3) значений консолидации).
[0082] Дополнительное разделение (сегментация) слежения на большее число пространственных зон, которые дополнительно разделяются, с предварительно заданными целями и отвлекающими элементами, которые подходят к ситуации.
[0083] Фаза 2: Развитие способности субъекта обрабатывать разные перспективы наблюдения. После того, как субъект развил способность обрабатывать несколько целевых зон в системе NT, контроллер последовательности тренинга вносит разные конкретные зрительные перспективы с использованием метода, аналогичного вышеупомянутым операциям. Упомянутые перспективы могут содержать:
[0084] Угол наблюдения, например, перспектива наблюдения от квотербэка, от принимающего игрока и т.п.
[0085] Угол наблюдения от горизонтали к более угловой перспективе, например, моделирование движения футболиста из приседа в положение стоя.
[0086] Фаза 3: Создание экологически правильных окружающих сред. Контроллером последовательности тренинга выполняются следующие операции:
[0087] После того, как фазы 1 и 2 завершаются, контроллер последовательности тренинга может двигаться дальше к более реалистичным виртуальным окружающим средам, например, использованию виртуальных стадионов, аватаров с плавными уровнями, с применением тех же стратегий.
[0088] Контроллер последовательности тренинга может повышать нагрузки во время тренинга посредством введения фонов, ситуационных контекстов, акустического шума и звуков и так далее, чтобы наращивать особенность тренинга, при одновременном измерении на всем протяжении порогов скоростей системы NT.
[0089] Разумеется, приведенный подход можно адаптировать и развивать в виде клиента.
3A) КОНКРЕТНАЯ АНИМАЦИЯ АВАТАРА NT
[0090] При использовании аватаров, контроллер последовательности тренинга анимирует их конкретным способом, чтобы допускать измерения порогов скоростей в системе NT. Например, случайные биологические перемещения аватаров можно реализовать в зависимости от конкретных перемещений во время действий для некоторых целевых аватаров. Например, нецелевые аватары могут состоять из неконкретного шума биологического движения (по описанию шума биологического движения, смотри работу Legault, I., Troje, N.F. & Faubert, J. (2012), Healthy older observers cannot use biological-motion point-light information efficiently within 4 m of themselves, i-Perception, 3(2), 104-111, содержание которой включено в настоящую заявку путем отсылки). Однако целевые аватары могут характеризоваться конкретными действиями, имеющими смысл для моделируемой игры, например, поворотом в одном направлении, бегом вперед или назад и тому подобное. Манипуляция скоростью следует обычным правилам системы NT в том, что скорость увеличивается, когда решения являются правильными, после выдержки времени или снижается, если совершается ошибка. Предполагается, что реализация упомянутых манипуляций аватарами или состояниями биологического движения должна быть оригинальной в контексте перцептивно-когнитивного тренинга.
3B) РАЗНЫЕ КОГНИТИВНЫЕ ЗАДАЧИ
[0091] Выше предложены два (2) элемента для превращения системы NT-LS из общей в конкретную. Упомянутые элементы включают в себя a) пространственную локализацию (например, разделение объемного пространства на подобласти с резко выделенными значениями для задачи), и b) изменение конкретных атрибутов целей и отвлекающих факторов, чтобы они развивались от, например, общего сферического характера до конкретной характеристики, например, аватара человека.
[0092] Хотя упомянутые элементы описаны выше с использованием примеров, содержащих аватары людей, другие примеры могут содержать движущиеся транспортные средства с целью обучения субъекта принятию правильных решений для исключения столкновений в присутствие моделируемого дорожного движения. Разумеется, движущиеся объекты и аватары можно использовать в комбинации. Например, моделирование дорожного движения может содержать движущиеся транспортные средства и пешеходов.
[0093] Компонент 3, который можно ввести, представляет собой характер требования к когнитивному процессу. Например, вместо отслеживания целей среди отвлекающих факторов в данной области, можно запросить, чтобы субъект выполнял математическую задачу, так как именно эта задача требуется в данной области, а задача отслеживания движения в другой области. С упомянутой целью, вариант концепции сегментированной сцены, которую представили выше, изображен на фигуре 8, которая изображает зал управления дорожным движением в Токио, формирующий сегментированное распределение сцены. Фигура 8 показывает отдельные компоненты движения в некоторой зоне операторского зрительного поля (видеомониторов) и возможную оценку в цветовом коде на большой верхней панели. От оператора требуется обрабатывать упомянутые различные компоненты движения, которые пространственно распределены в пределах его зрительного поля. Контроллер последовательности тренинга может применяться, главным образом, для тренинга оператора отслеживанию движущихся целей в отношении объектов в его нижнем зрительном поле. Одновременно можно выполняться анализ верхнего зрительного поля, чтобы идентифицировать некоторые цвета или некоторые образы с использованием сопоставления образов.
[0094] Таким образом, система NT-LS может быть создана для перехода от общей системы обучения к более конкретной системе обучения. Каждый уровень конкретного тренинга может развиваться с использованием тех же самых базовых принципов системы NeuroTracker, включая, например, пороги скоростей посредством фокусировки на наиболее высоких скоростях, при которых может быть выполнена каждая задача.
ОТ ОБЩЕГО К КОНКРЕТНОМУ ТРЕНИНГУ
[0095] В заключение, система NT-LS допускает адаптацию от общего тренинга основных свойств к управлению сложными динамическими сценами в условиях тренинга возрастающей особенности посредством изменения трех (3) свойств компонентов сцены:
[0096] Пространственной конфигурации, переходящей из большого общего объемного пространства к подразделам данного пространства, с выделением особенно важных зон для конкретных задач.
[0097] Элементы, которые обрабатываются или отслеживаются с изменением от, например, общего сферического характера к более конкретной характеристике элемента изображения, например, аватары для перемещений в толпе, движущиеся объекты, движущиеся транспортные средства в дорожном движении и т.п.
[0098] Третий элемент, который может изменяться от общего к конкретному, является реальной когнитивной задачей, выполняемой в конкретной 3D зоне. В некоторых случаях, задача включает в себя отслеживание цели. В других случаях, задача может требовать идентификации цветовых кодов, математической задачи и т.п.
[0099] Специалисты со средним уровнем компетентности в данной области техники обнаружат, что описанные перцептивно-когнитивно-моторная система и способ являются всего лишь наглядными и не предполагают никакого ограничения. Другие варианты осуществления будут легко созданы самими упомянутыми специалистами со средним уровнем компетентности в данной области техники после изучения настоящего раскрытия. Кроме того, раскрытые перцептивно-когнитивно-моторная система и способ можно доработать для создания полезных решений соответственно существующим потребностям и проблемам совершенствования когнитивных функций.
[00100] Для ясности, показаны и описаны не все стандартные признаки реализации перцептивно-когнитивно-моторной системы и способа. Разумеется, следует понимать, что при разработке любой такой реальной реализации перцептивно-когнитивно-моторной системы и способа может потребоваться принятие многочисленных конкретных решений по реализации, чтобы достигнуть конкретных целей разработчика, например, соблюдения ограничений, связанных с применением, системой и работой, и чтобы упомянутые конкретные цели изменялись от одной реализации к другой и от одного разработчика к другому. Кроме того, будет понятно, что разработка может быть сложной и займет много времени, но, тем не менее, будет стандартной инженерной деятельностью для специалистов со средним уровнем компетентности в области перцептивно-когнитивного тренинга, изучивших настоящее раскрытие.
[00101] В соответствии с настоящим раскрытием, компоненты, операции технологического процесса и/или структуры данных, описанные в настоящей заявке, могут быть реализованы с использованием различных типов операционных систем, компьютерных платформ, сетевых устройств, компьютерных программ и/или универсальных машин. В дополнение, специалистам со средним уровнем компетентности в данной области техники будет понятно, что можно также использовать устройства менее универсального характера, например, устройства с жесткой логикой, логические матрицы с эксплуатационным программированием (FPGA), специализированные интегральные схемы (ASIC) или подобные устройства. В случае, когда способ, содержащий последовательность операций технологического процесса, реализуется компьютером или машиной, и данные операции технологического процесса могут храниться как последовательность команд, считываемых машиной, их можно хранить на материальной среде.
[00102] Системы и модули, описанные в настоящей заявке, могут содержать программное обеспечение, микропрограммное обеспечение, аппаратное обеспечение или любую(ые) комбинацию(ии) программного обеспечения, микропрограммного обеспечения или аппаратного обеспечения, пригодные для целей, описанных в настоящей заявке. Программные и другие модули могут храниться на серверах, рабочих станциях, в персональных компьютерах, планшетных компьютерах, персональных электронных секретарях (PDA) и других устройствах, пригодных для целей, описанных в настоящей заявке. Программные и другие модули могут вызываться из локальной памяти, по сети, с помощью браузера или другого приложения, или с помощью другого средства, пригодного для целей, описанных в настоящей заявке. Структуры данных, описанные в настоящей заявке, могут содержать компьютерные файлы, переменные, программируемые матрицы, программируемые структуры или любые схемы или способы электронного хранения информации, или любые их комбинации, пригодные для целей, описанных в настоящей заявке.
[00103] Хотя настоящее изобретение описано выше на примере не ограничивающих наглядных вариантов осуществления, данные варианты осуществления можно модифицировать, как требуется, в пределах объема охраны прилагаемой формулы изобретения, без выхода за пределы существа и характера настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ НЕЙРОТРЕНИНГА С ИСПОЛЬЗОВАНИЕМ ИГРОВОЙ СРЕДЫ | 2023 |
|
RU2829688C1 |
| СПОСОБ ОЦЕНКИ ПСИХОФИЗИОЛОГИЧЕСКОЙ ГОТОВНОСТИ СПЕЦИАЛИСТА ОХРАНЫ | 2024 |
|
RU2836986C1 |
| Способ социально-бытовой адаптации пациентов с когнитивными и речевыми нарушениями | 2021 |
|
RU2798703C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| Способ реабилитации нарушений предметно-манипулятивной деятельности верхней конечности методом эрготерапии в виртуальной среде у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2817336C1 |
| Способ и система последовательного восстановления и развития когнитивных и двигательных функций человека | 2024 |
|
RU2828533C1 |
| Способ реабилитации двигательных нарушений в виртуальной среде с выполнением нескольких задач одновременно у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2823137C1 |
| ТРЕНАЖЕР ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ ДЛЯ ОТРАБОТКИ НАВЫКА ХОККЕИСТА ПО ОТБИВАНИЮ ШАЙБЫ И ОПРЕДЕЛЕНИЯ УРОВНЯ МАСТЕРСТВА | 2022 |
|
RU2786594C1 |
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| СИСТЕМА И СПОСОБЫ ДЛЯ МЕДИЦИНСКОГО ИСПОЛЬЗОВАНИЯ ОТОБРАЖЕНИЯ И ЗАХВАТА ДВИЖЕНИЯ | 2012 |
|
RU2603047C2 |
Изобретение относится к перцептивно-когнитивно-моторной системе обучения. Система включает в себя устройство для оценки или совершенствования перцептивно-когнитивных способностей субъекта в течение последовательности тренинга. Устройство включает в себя дисплей, сконфигурированный с возможностью представления субъекту визуального контакта с окружающей средой. Система содержит также контроллер последовательности тренинга, сконфигурированный с возможностью консолидации результатов первых последовательных тестов, выполненных с использованием единственной пространственной зоны, сформированной окружающей средой, сегментации на множество пространственных зон и консолидации результатов вторых последовательных тестов, выполненных с использованием множества пространственных зон. Раскрываются также способы оценки или совершенствования перцептивно-когнитивных способностей субъекта. 3 н. и 21 з.п. ф-лы, 8 ил.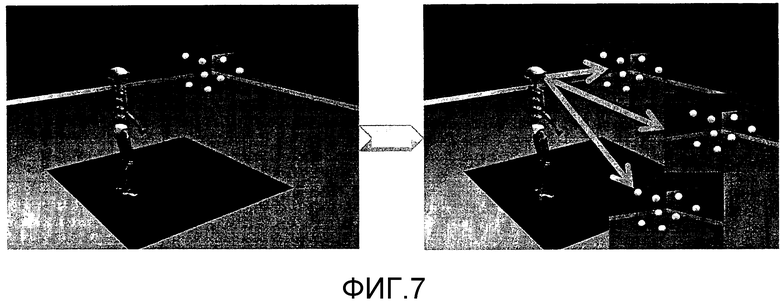
1. Система перцептивно-когнитивно-моторного обучения, содержащая:
устройство для оценки или совершенствования перцептивно-когнитивных способностей субъекта во время последовательных тестов, при этом устройство включает в себя дисплей, сконфигурированный с возможностью предоставления субъекту визуального контакта с окружающей средой;
средство для консолидации результатов первых последовательных тестов, выполненных с использованием единственной пространственной зоны, сформированной окружающей средой;
средство для сегментации окружающей среды на множество пространственных зон; и
средство для консолидации результатов вторых последовательных тестов, выполненных с использованием множества пространственных зон.
2. Система перцептивно-когнитивно-моторного обучения по п. 1, в которой окружающая среда является трехмерной окружающей средой.
3. Система перцептивно-когнитивно-моторного обучения по п. 1, содержащая средство для изменения перспективы наблюдения субъектом пространственной зоны или пространственных зон.
4. Система перцептивно-когнитивно-моторного обучения по п. 1, содержащая средство для использования в пространственных зонах аватаров, выполняющих специфические и неспецифические действия.
5. Система перцептивно-когнитивно-моторного обучения по п. 1, содержащая средство для использования в пространственных зонах движущихся объектов, выполняющих специфические и неспецифические действия.
6. Система перцептивно-когнитивно-моторного обучения по п. 1, содержащая средство для введения требования субъекта к когнитивному процессу в пространственной зоне или пространственных зонах.
7. Система перцептивно-когнитивно-моторного обучения по п. 1, в которой множество пространственных зон содержит множество объемных пространств, представляющих движущиеся объекты.
8. Система перцептивно-когнитивно-моторного обучения по п. 1, в которой множество пространственных зон содержит сегментированную сцену, включающую в себя множество отдельных движущихся компонентов.
9. Система перцептивно-когнитивно-моторного обучения, содержащая:
устройство для оценки или совершенствования перцептивно-когнитивных способностей субъекта во время последовательных тестов, при этом устройство включает в себя дисплей, сконфигурированный с возможностью предоставления субъекту визуального контакта с окружающей средой; и
контроллер последовательности тренинга, сконфигурированный с возможностью:
консолидации результатов первых последовательных тестов, выполненных с использованием единственной пространственной зоны, сформированной окружающей средой;
сегментации окружающей среды на множество пространственных зон; и
консолидации результатов вторых последовательных тестов, выполненных с использованием множества пространственных зон.
10. Система перцептивно-когнитивно-моторного обучения по п. 9, в которой окружающая среда является трехмерной окружающей средой.
11. Система перцептивно-когнитивно-моторного обучения по п. 9, содержащая средство для изменения перспективы наблюдения субъектом пространственной зоны или пространственных зон.
12. Система перцептивно-когнитивно-моторного обучения по п. 9, содержащая средство для использования в пространственных зонах аватаров, выполняющих специфические и неспецифические действия.
13. Система перцептивно-когнитивно-моторного обучения по п. 9, содержащая средство для использования в пространственных зонах движущихся объектов, выполняющих специфические и неспецифические действия.
14. Система перцептивно-когнитивно-моторного обучения по п. 9, содержащая средство для введения требования субъекта к когнитивному процессу в пространственной зоне или пространственных зонах.
15. Система перцептивно-когнитивно-моторного обучения по п. 9, в которой множество пространственных зон содержит множество объемных пространств, представляющих движущиеся объекты.
16. Система перцептивно-когнитивно-моторного обучения по п. 9, в которой множество пространственных зон содержит сегментированную сцену, включающую в себя множество отдельных движущихся компонентов.
17. Способ оценки или совершенствования перцептивно-когнитивных способностей субъекта, содержащий следующие этапы:
представляют субъекту последовательность тренинга, при этом последовательность тренинга включает в себя множество последовательных тестов, представляемых субъекту в окружающей среде;
консолидируют результаты первых последовательных тестов, выполненных с использованием единственной пространственной зоны, сформированной окружающей средой;
сегментируют окружающую среду на множество пространственных зон; и
консолидируют результаты вторых последовательных тестов, выполненных с использованием множества пространственных зон.
18. Способ по п. 17, в котором окружающая среда является трехмерной окружающей средой.
19. Способ по п. 17, содержащий этап изменения перспективы наблюдения субъектом пространственной зоны или пространственных зон.
20. Способ по п. 17, содержащий этап использования в пространственных зонах аватаров, выполняющих специфические и неспецифические действия.
21. Способ по п. 17, содержащий этап использования в пространственных зонах движущихся объектов, выполняющих специфические и неспецифические действия.
22. Способ по п. 17, содержащий этап введения требования субъекта к когнитивному процессу в пространственной зоне или пространственных зонах.
23. Способ по п. 17, содержащий этап получения от субъекта команды на изменение по меньшей мере одного параметра последовательности тренинга.
24. Способ по п. 17, содержащий следующие этапы:
обнаруживают электроэнцефалограммы субъекта; и
изменяют, по меньшей мере, один параметр последовательности тренинга на основании анализа обнаруженных электроэнцефалограмм.
| US 2011213197 A1, 01.09.2011 | |||
| US 2011298706 A1, 08.12.2011 | |||
| WO 2012148524 A1, 01.11.2012 | |||
| US 2006003298 A1, 05.01.2006 | |||
| US 2004002046 A1, 01.01.2004. |

