Изобретение относится к морской гидрометеорологии и может быть использовано для определения поля дрейфа морских льдов, а более конкретно - для определения дрейфа с использованием изображений, полученных с космических аппаратов на околоземной орбите.
Известны способы определения дрейфа морских льдов путем сопоставления характерных одинаковых деталей ледяного покрова на двух последовательных спутниковых изображениях (Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение / Иоханнессен О.М., Александров В.Ю., Фролов И.Е. и др. СПб. Наука, 2007, с. 235-238 [1]). Недостатком способа является высокая трудоемкость, обусловленная обработкой фотографических изображений по визуальному выявлению характерных одинаковых деталей ледяного покрова.
Известен способ определения дрейфа льдов, основанный на слежении за характерными деталями ледяного покрова двух последовательных изображений, полученных ледяного покрова двух последовательных изображений, полученных с ИСЗ (Cjllins M.J., Emery W.J. Computational method for estimating sea motion in sequential Seasat synthetic aperture radar imagery by matched filtering // J. Geophys. Res. 1988. №93(C8), p. 9241-9251 [2]).
Известен также способ получение дрейфа льда по паре последовательных изображений (Vesecky J.F., Samadani R., Smith M.P., Daica J.M. et. al. Observation of sea-ice dynamics using synthetic aperture radar images: automated analysis // IEEE Transaction on Geoscience and Remote Sensing. 1988. №26(1), p. 38-48 [3]), в котором сопоставляются границы полей и разрывов, представленных в виде отрезков прямых линий на последовательных снимках.
Недостатком указанных способов является высокая трудоемкость, обусловленная обработкой фотографических изображений по визуальному выявлению характерных одинаковых деталей ледяного покрова, а в случае обработки цифровых изображений - большим объемом исходных данных. Аналогичные недостатки присущи также известным техническим решениям (авторское свидетельство SU №359512 А1, 03.12.1972 [4], патент RU №2453865 С1, 20.06.2012 [5], патент RU №2416070 С1, 10.04.2011 [6], заявка US №2002054275 A1, 09.05.2002 [7]).
Известен также способ определения дрейфа льдов, техническим результатом которого является уменьшение трудоемкости при определении дрейфа морских льдов (патент RU №2582850 С2, 27.04.2016 [8]).
При этом технический результат достигается тем, что способ осуществляется путем предварительной обработки изображения морских льдов, заключающейся в совмещении негативного и позитивного изображений последовательных снимков одного и того же района, результатом которой является получение изображений смещений кромки ледяных образований. Для получения указанного изображения предлагается использовать известный способ сличения объектов, заключающийся в проектировании сличаемых объектов на экран и совмещении идентичных участков изображения, в котором изображения сличаемых материалов проектируются на экран во взаимоисключающих контрастах, например как негативное и позитивное изображение, или красное и синее [4]. Недостатком известного способа определения дрейфа льдов является то, что направление дрейфа определяется по ориентации перпендикуляра к контурам минимальной и максимальной интенсивности, а пройденное дрейфующим ледяным образованием расстояние - по максимальному размеру одного из участков минимальной или максимальной яркости в направлении дрейфа одного и того же ледяного образования. При таком определении дрейфа льдов, корректная классификация является важной предпосылкой для оценки таких параметров морских льдов, как их сплоченность, распределение полыней и их формы. Классификация включает предварительную обработку изображений, выделение ледовых объектов, вычисление параметров изображений (сегментов), пиксельную или зонную классификацию с использованием набора вычислительных параметров, завершающий этап обработки.
Предварительная обработка изображения включает в себя радиометрическую и геометрическую коррекции, фильтрацию, подавление спекл-шума и улучшение контрастности и предназначена для обеспечения относительной или абсолютной калибровки изображений и удаления различных артефактов. При проведении радиометрической калибровки в отдельных случаях необходимо выполнить коррекцию диаграмму направленности антенны, ослабления сигнала по дальности, а также от угла наклона, используя известные параметры РСА. При классификации РСА - изображений с широкой полосой обзора также необходимо учитывать угловую зависимость коэффициента обратного рассеяния морских льдов. Для уменьшения этого эффекта может быть применена нормализация на изменение дальности с использованием эмпирических зависимостей для преобладающего на изображении вида льда. Однако это требует априорных знаний о преобладающем на изображении типе льда и не может полностью компенсировать радиометрические зависимости для других типов поверхностей на изображении.
Задачей предлагаемого технического решения является повышение достоверности определения дрейфа льдов при совмещении изображений льдов на снимках.
Поставленная задача решается за счет того, что в способе определения поля дрейфа морских льдов, заключающемся в совмещении пары последовательных спутниковых изображений одного и того же участка ледовой поверхности, совмещении неподвижных деталей изображений, придании изображениям взаимно-исключающих световых или цветовых контрастов, отличающийся тем, что направление дрейфа определяется как отношение поперечной составляющей скорости к продольной составляющей скорости дрейфующего объекта, а пройденное расстояние по перемещению точек дрейфующего объекта, характеризующих локальный максимум высот дрейфующего объекта относительно береговых ориентиров путем построения метрик Хаусдорфа.
Предлагаемый способ определения дрейфа ледовых образований, как и в прототипе, реализуется посредством компьютера со стандартной комплектацией, включающей порты ввода-вывода компьютера, печатающее устройство, кабель, соединяющий печатающее устройство и порт компьютера, монитор, кабель, соединяющий монитор и порт компьютера, манипулятор (трекбол или «мышь»), кабель, соединяющий манипулятор и порт компьютера, устройство ввода изображения в компьютер (например, сканер или фотоаппарат), кабель, соединяющий устройство ввода изображения в компьютер и порт компьютера.
С устройства ввода изображения по кабелю через порт компьютера поступает сигнал изображения. Манипулятор соединен с компьютером кабелем, по которому на входной разъем поступает сигнал. Компьютер соединен с монитором кабелем, подключенным к порту, и с печатающим устройством кабелем через порт.
С помощью устройства ввода производится загрузка 2-х последовательных снимков с изображением одной и той же акватории морской поверхности, покрытой льдом, полученных через некоторый интервал времени. Соответствующие сигналы по кабелю поступают на вход компьютера.
С помощью манипулятора по изображениям на экране монитора неподвижные объекты изображения, такие как острова, мысы или другие характерные участки изображения, совмещаются и затем изображение второго снимка инвертируется (делается негативом - далее в качестве примера рассматривается этот вариант или первое окрашивается в основной цвет, а второе - в дополнительный). При сложении полностью совпадающих изображений получится изображение равномерного тона или цвета по всему снимку.
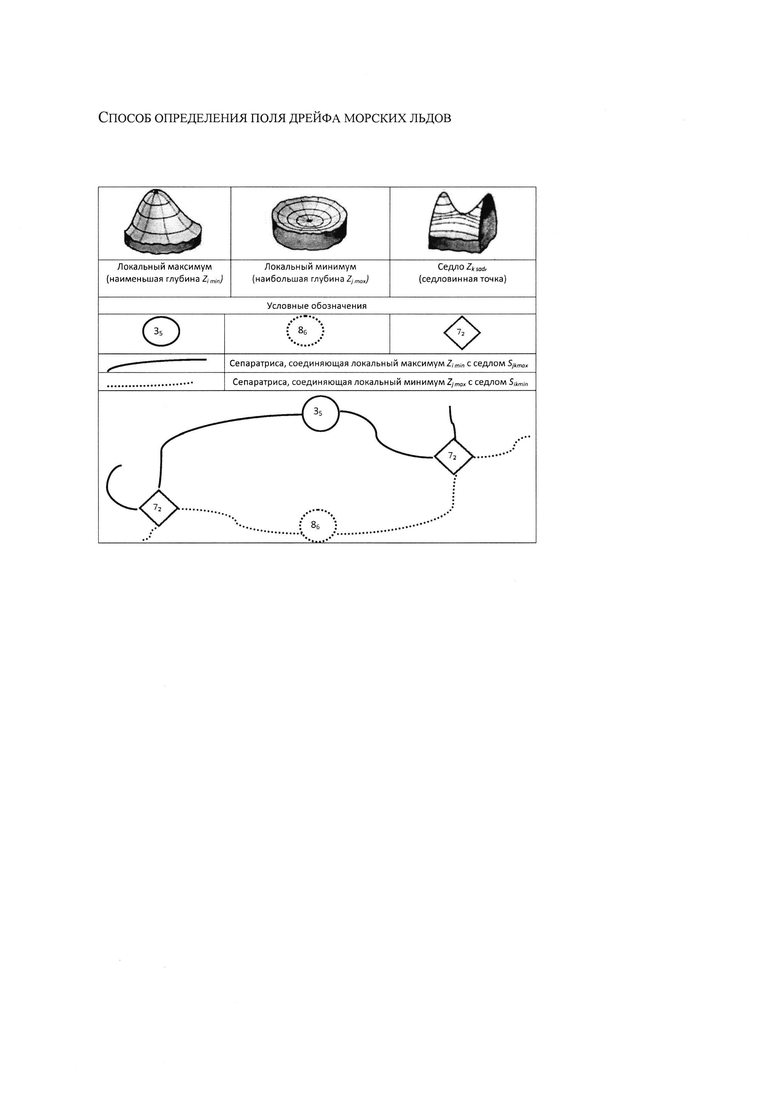
Далее получают картографическое отображение полученных изображений ледовых образований, путем представления ледовой поверхности набором ячеек Морса-Смейла (CMS), которые сегментируют картографическое отображение поверхности ледовой поверхности на участки с «однородным» полем градиента высоты ледовой поверхности (Жуков Ю.Н. Автоматизированный метод нахождения линий водоразделов и тальвегов // Навигация и гидрография. - 2013. - №35. - С. 58-63).
Применительно к отображению надводного рельефа ледового образования границы ячеек CMS образуют:
- критические точки, а именно: точки локальных максимумов (наибольшие высоты), точки минимумов (наименьшие высоты) и точки седел (седловинные точки);
- сепаратрисы - линии, соединяющие критические точки в определенном порядке.
Сепаратрисы, соединяющие точки наименьших и наибольших высот с точками седел, представляют собой монотонные линии, в каждой точке которых направление линии совпадает с направлением градиента высоты.
В точках наименьших Zmin и наибольших Zmax высот может пересекаться неограниченное количество сепаратрис, а в точках седел Zsad под углами, близкими к прямым, пересекаются только четыре сепаратрисы (фигура).
Далее определяются продольная и поперечная составляющая скорости ледового образования по перемещению 2-3-х характерных точек дрейфующего ледового образования характеризующих локальный максимум высот дрейфующего объекта относительно береговых ориентиров за фиксированное время. Направление дрейфа α определяется как отношение поперечной Vy составляющей скорости к продольной Vx составляющей скорости дрейфующего объекта:
 ,
,
а пройденное расстояние по перемещению точек дрейфующего объекта, характеризующих локальный максимум высот дрейфующего объекта относительно береговых ориентиров путем построения метрик Хаусдорфа (Жуков Ю.Н. Способ оценки близости положения изолиний. «Навигация и гидрография» №15, 2002. - С. 101-106):

где
rh(c, D) - расстояние от некоторой точки (с), характеризующая локальный максимум, принадлежащей С (плоскость ледового покрытия), до множества точек берегового ориентира D;
c, d - точки, принадлежащие изолиниям С, D.
Метрика Хаусдорфа применяется для компактных множеств, что в нашем случае достигается ограничением изобат границами рассматриваемого участка или их замкнутостью в пределах карты.
Для сравнения расстояний от ледового образования до береговых ориентиров акватории предлагается использовать отношение метрик Хаусдорфа, рассчитанных между нанесенными на морские карты (планшеты съемки рельефа дна) одноименными изобатами и береговой линей по следующему алгоритму.
1. Вычисляют по формуле (2) расстояния ρi(s, C) от каждой фиксированной (i) точки, принадлежащей береговой линии (S) до всех точек, принадлежащих ледовой поверхности (С).
Вычисляют по формуле (2) минимальное расстояние от каждой фиксированной (i) точки, принадлежащей (S), до (С), 
2. Вычисляют расстояние от (S) до (С):

3. Повторяют вычисления по формулам (2, 3, 4), вычисляют расстояние от (С) до (S):
rH(C, S)=max[rih(c, S)]=Rmax CS.
4. Вычисляют расстояние (метрику Хаусдорфа) между (S, С): RH(S, C)=Rmax SC>Rmax CS.
5. Вычисляем метрику Хаусдорфа между (S, D): RH(S, D)=Rmax DS>Rmax SD.
6. Вычисляют (δRH) отношение метрик Хаусдорфа:
δRH=RH(S, D)/RH(S, C).
Величина отношения метрик Хаусдорфа (δRH) может быть использована для сравнения расстояний от ледового образования до разных береговых ориентирах. Данные вычисления могут быть реализованы программными средствами морских геоинформационных систем, что делает возможной автоматизацию расчетов при решении вышеперечисленных задач.
Вся полученная информация отображается на экране монитора или печатающем устройстве. Также предусмотрено ускоренное проигрывание возможных вариантов дрейфа ледовых образований, например, относительно объекта хозяйственной деятельности.
Источники информации
1. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на северном морском пути: изучение и применение / Иоханнессен О.М., Александров В.Ю., Фролов И.Е. и др. СПб. Наука, 2007, с. 235-238.
2. Cjllins M.J., Emery W.J. Computational method for estimating sea motion in sequential Seasat synthetic aperture radar imagery by matched filtering // J. Geophys. Res. 1988. №93(C8), p. 9241-9251.
3. Vesecky J.F., Samadani R., Smith M.P., Daica J.M. et. al. Observation of sea-ice dynamics using synthetic aperture radar images: automated analysis // IEEE Transaction on Geoscience and Remote Sensing. 1988. №26(1), p. 38-48.
4. Авторское свидетельство SU №359512 A1, 03.12.1972.
5. Патент RU №2453865 C1, 20.06.2012.
6. Патент RU №2416070 C1, 10.04.2011.
7. Заявка US №2002054275 A1, 09.05.2002.
8. Патент RU №2582850 C2, 27.04.2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2015 |
|
RU2593411C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2014 |
|
RU2582850C2 |
| Способ определения состояния ледяного покрова | 2016 |
|
RU2635332C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| СПОСОБ СОСТАВЛЕНИЯ ЛЕДОВЫХ КАРТ | 2011 |
|
RU2432547C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ЛЕДОВОЙ ОБСТАНОВКИ И ПРЕДОТВРАЩЕНИЯ ВОЗДЕЙСТВИЯ ЛЕДОВЫХ ОБРАЗОВАНИЙ НА МОРСКИЕ ОБЪЕКТЫ ХОЗЯЙСТВЕННОЙ ДЕЯТЕЛЬНОСТИ | 2014 |
|
RU2583234C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2416070C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
Изобретение относится к морской гидрометеорологии и может быть использовано для определения поля дрейфа морских льдов. Способ определения поля дрейфа морских льдов заключается в совмещении пары последовательных спутниковых изображений одного и того же участка ледовой поверхности, совмещении неподвижных деталей изображений, придании изображениям взаимно-исключающих световых или цветовых контрастов. При этом направление дрейфа определяется как отношение поперечной составляющей скорости к продольной составляющей скорости дрейфующего объекта. Пройденное расстояние по перемещению точек дрейфующего объекта, характеризующих локальный максимум высот дрейфующего объекта относительно береговых ориентиров, определяется путем построения метрик Хаусдорфа. Техническим результатом заявленного изобретения является повышение достоверности определения дрейфа льдов при совмещении изображений льдов на снимках. 1 ил.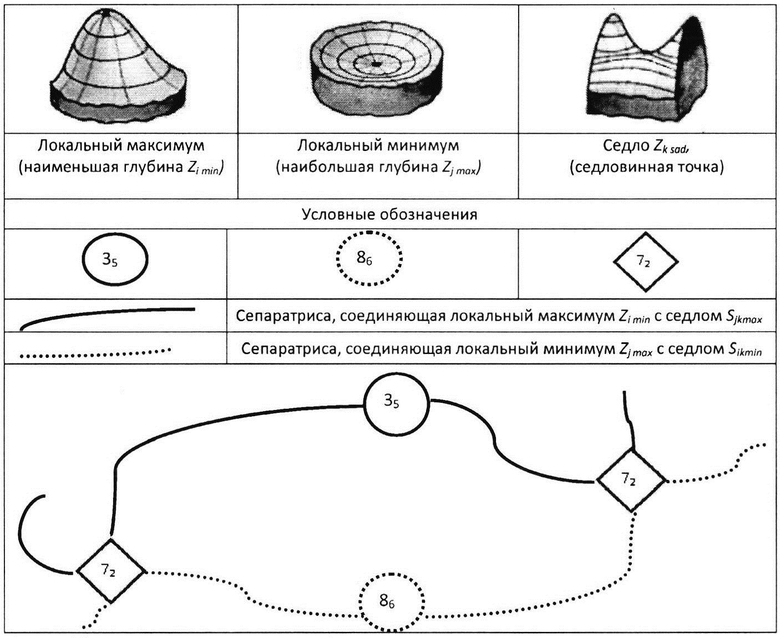
Способ определения поля дрейфа морских льдов, заключающийся в совмещении пары последовательных спутниковых изображений одного и того же участка ледовой поверхности, совмещении неподвижных деталей изображений, придании изображениям взаимно-исключающих световых или цветовых контрастов, отличающийся тем, что направление дрейфа определяется как отношение поперечной составляющей скорости к продольной составляющей скорости дрейфующего объекта, а пройденное расстояние по перемещению точек дрейфующего объекта, характеризующих локальный максимум высот дрейфующего объекта относительно береговых ориентиров путем построения метрик Хаусдорфа.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2014 |
|
RU2582850C2 |
| СПОСОБ СОСТАВЛЕНИЯ ЛЕДОВЫХ КАРТ | 2011 |
|
RU2432547C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2015 |
|
RU2593411C1 |
| US 9123134 B2, 01.09.2015. | |||

