Изобретение относится к гидролокации, а более конкретно к гидролокационной съемке нижней поверхности ледяного покрова и может быть использовано для мониторинга ледовых образований на акваториях с морскими терминалами, в том числе и на шельфе в условиях высоких широт.
Известен способ съемки нижней поверхности ледяного покрова (Гудошников Ю.П., Козлов Д.Н., Кубышкин Н.В., Водолазные исследования торосов и стамух в Баренцевом море в 2003 г. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе. СПб. 2004. Труды ААНИИ. Том 449, с. 23 8-246 [1], который заключается в следующем. В небольшие майны, расположенные в районах работ по разбуриванию торосов морфометрии и подводной гидролокации, опускается видеокамера в герметичном боксе для выбора места спуска водолазов. Критерием при выборе места спуска является наличие участка ровного льда не далее 50 м от наиболее заглубленной части киля тороса. На выбранном участке ровного льда готовится рабочая майна размером 2x1.5 м для спуска водолазов, расчищается от снега световая дорожка от майны к торосу для увеличения освещенности под водой. Рядом с майной устанавливается обогревательная палатка. Спуск водолазов выполняется в специальных гидрокостюмах. Подводная фото- и видеосъемка производится на цифровую видеокамеру, аналоговую видеокамеру и фотоаппарат «Зенит ЕТ» с объективом «Мир», помещенные в герметичные боксы. Для масштабирования изображений на боксы устанавливают лазерные указатели, обеспечивающие параллельные лучи с базовым расстоянием 0,5 м. Для проверки глубины отснятых объектов и ориентации камеры перед ее объективом устанавливают глубиномер с указателями крена и дифферента. Для подсветки снимаемых объектов используют подводные светильники 200 Вт и две фотовспышки по 80 Дж каждая. Цифровая и аналоговая видеокамеры в боксах, светильники с аккумуляторами и лазерные указатели конструктивно смонтированы в одном блоке. Для привязки подводных наблюдений к данным бурения в скважины опускают маркированные рейки таким образом, чтобы маркировка была хорошо различима для подводного наблюдателя. После проведения съемок, по полученным фото- и видеоматериалам выполняют анализ о морфометрии подводной части ледяного покрова.
Данный способ имеет существенные ограничения по использованию, обусловленные пределом погружения водолазов, наличие мутности в водных слоях. Кроме того, привязка подводных наблюдений с использованием маркированной рейки имеет невысокую точность, что при камеральной обработке полученных материалов может внести дополнительную погрешность. Реализация способа весьма трудоемкая.
Известен также способ и устройство для его осуществления (Гидролокационная съемка нижней поверхности ледяного покрова / Зубакин Г.К., Криницкий П.И., Гудошников Ю.П. и др. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе. СПб. 2004. Труды ААНИИ. Том 449, с. 229-237 [2]), который реализуется следующим образом. Во льду рядом с исследуемым объектом на расстоянии 20-50 м бурится лунка диаметром не менее 180-220 мм. В лунку, проверенную на наличие «подсовов», опускается антенная конструкция на глубину сканирования. Рядом устанавливается палатка, в которой размещается регистрирующая аппаратура. Над лункой размещается поворотная платформа. Кабель-трос зажимается во втулке поворотной платформой. С помощью анкерного устройства антеннам придают рабочее положение. К приемопередатчику подключается кабель от антенного модуля и линия от подводного блока с телеметрией. Производится экспозиция, длительность которой зависит от радиуса излучаемого кругового пространства ледовой поверхности. По окончании экспозиции полученное изображение визуализируется на мониторе в полярной системе координат. На одной лунке съемка ведется с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова. Демонтаж комплекса производится в обратном порядке. После приведения всего оборудования в транспортное состояние комплекс перемещается на следующую точку. В перерыве между ледовыми станциями результаты съемки в цифровом виде записываются на компакт-диске. При необходимости распечатывается твердая копия на принтере.
Энергообеспечение осуществляется переносной электростанцией. Рабочая палатка обогревается электротепловентилятором. Графическая станция размещается в термоблоке. Экспозиции привязаны к топопланам верхней поверхности льда. Результаты гидролокационной съемки даются в виде графических файлов bmp-формата, содержащих изображения результатов сканирования нижней поверхности льда, каждое из которых представляет собой круговое поле, его центром является точка установки гидролокатора. Выступы на нижней поверхности льда обозначаются белыми засветками на общем темно-синем фоне поля. Тень, отбрасываемая выступом при сканировании, отображается темным пятном. На круговом поле введена прямоугольная система координат, такая же, как и используемая при топосъемке верхней поверхности льда на данной станции.
Обработка снимков осуществляется при помощи программы View Polar sonar, которая позволяет определить горизонтальные размеры элементов рельефа нижней поверхности льда и заглубление выступов на ней по длине тени в направлении радиуса сканирования. Измерения в горизонтальной плоскости выполняются в режиме «Линейные размеры», что позволяет определить расстояние между двумя точками с известными координатами при помощи «мыши». Определение величины заглубления выступов происходит аналогичным образом. В режиме «высота киля» после введения поправки на толщину льда при помощи «мыши» отмечается точка конца тени от интересующего выступа. При этом высвечивается радиус сканирования, на котором отмечается точка начала тени. После выбора обеих точек в нижней части экрана в отдельных окнах выводятся координаты и заглубление (в метрах) выбранной точки выступа.
Устройство для реализации известного способа представляет собой гидролокатор кругового обзора, работающий в полярной системе координат PSS-2, и конструктивно состоит из антенны, размещенной на анкерном устройстве, немагнитной штанги с анкерным устройством жестко соединенной с несущим кабель-тросом, поворотной платформы, которая вращает кабель-трос, прецизионного датчика вращения, двухканального приемопередатчика, станции обработки данных на базе портативного компьютера PENTIUM-11, спутниковой навигационной системы GPS, системы электроснабжения. При этом рабочая частота приемопредатчика 115 кГц, длительность импульса посылки 125 мкс, излучаемая мощность 1,5 кВт, ширина диаграммы направленности 0,8 градусов. Устройство также содержит фазовый канал и блок телеметрии, включающий датчики крена, дифферента, заглубления и азимута излучаемого сигнала.
При использовании данного устройства время одной экспозиции в зависимости от радиуса охвата составляет от 10 до 40 минут. Телеметрия позволяет определить пространственную ориентацию антенного модуля, а использование фазового канала дает получить картину видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования). В оптимальных условиях светотеневая картина нижней поверхности ледяного покрова может охватывать площадь до 400-750 м в диаметре при работе из одной лунки.
Достоинствами способа является то, что можно обследовать на максимальное заглубление киля на порядок больше торосов, выявить заглубленные выступы на нижней поверхности льда, расположенные между точками бурения, и не обнаруженные прямыми измерениями, а также оценить такую важную морфометрическую характеристику, как максимальное заглубление килей торосов.
К недостаткам известного способа могут быть отнесены следующие недостатки.
1. Сложная форма нижней поверхности всторошенного льда может приводить к появлению дополнительной погрешности определения осадки киля. Эта погрешность возникает в случае, когда за наиболее выступающей частью киля расположен участок всторошенного льда с большой протяженностью вдоль радиуса сканирования, не только не перекрываемый тенью от выступа, но и ограничивающий ее размеры. Для устранения этой погрешности в известном способе вводится поправка, обусловленная толщиной льда в районе наиболее удаленной от центра сканирования границы тени. Эта поправка определяется по данным механического бурения и прибавляется к максимальной осадке киля, определенной по размерам тени. Поскольку при сканировании охватывается площадь ледяного покрова, в несколько раз превышающая полигон сквозного бурения, возможен вариант, когда данные о толщине льда в районе тени, по результатам бурения отсутствуют. В этом случае в качестве поправки принимают среднюю толщину ровного льда в районе станции. Однако при этом возможно внесение дополнительной погрешности в конечный результат из-за неточного значения поправки на толщину льда. Аналогичный вариант также возможен, когда тень, отбрасываемая килем тороса, выходит за границу кругового снимка.
2. Отсутствует возможность построения модели рельефа, которая очень важна для оценки возможных последствий от сближения дрейфующих торосов и айсбергов с буровыми платформами и морскими газовыми и нефтяными терминалами.
Кроме того, способ имеет ограниченное применение, так как может выполняться только с ледовых полей, на которых могут быть оборудованы станции, заглубление антенного блока не превышает 25 м.
3. Система навигации (визуальное воспроизведение ледового поля) построена по известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации.
Известны также способы и устройства (патент FR №2431137 [3], патент FR №2509869 [4], патент DE №2481791 [5], патенты GB №1418614 [6], GB №1486068 [7], патенты US №4596007 [8], №4603408 [9], №4605140 [10], авторские свидетельства SU №747313 [11], №1060033 [12]), представляющие собой гидролокационные системы, предназначенные для топографического представления донной поверхности и нижележащих слоев, и размещенные внутри капсулы, буксируемой в погруженном положении судном-носителем. В принципе, данные системы могут быть использованы для топографического представления погруженной части ледяного поля или айсберга путем ее сканирования гидролокационными сигналами, что позволит исключить погрешность определения осадки киля за счет расширения границы исследуемого участка при использовании параметрических антенн (а.с. SU №688104 [13], патент US №4287580 [14]). Однако размещение гидролокационных систем в буксируемых капсулах судном-носителем требует сложной системы ориентации и позиционирования для удержания капсулы относительно судна и ледового поля, что практически исключает вариант их использования для съемки рельефа подводной части ледяных полей, представляющих собой торосистые поверхности.
Не решают данную проблему также известные решения, приведенные в источниках информации: Клей К., Медвин Г., "Акустическая океанография. Основы и применения", - М: Мир, 1980, стр. 580 [15], Alok К. Chaturvedi and Les A. Piegl, "Procedural method for terrain surface interpolation", Comput. and Graphics, Vol. 20, No. 4, pp. 541-566, 1996 [16], Elsevier Science Ltd. J.J. Koenderink and A.J. van Doom, "Surface Shape and Curvature Scales"; Image and Vision Computing, vol. 10, no. 8, pp. 557-565, 1992 [17].
Известно также техническое решение, техническим результатом которого, является повышение достоверности съемки поверхности ледяного покрова (патент RU №24444760 С1, 10.03.2012 [18].
В известном способе съемки нижней поверхности ледяного покрова [18], который включает размещение гидроакустической аппаратуры в водной среде для получения картины видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования), производство экспозиций, которые привязаны к топопланам верхней поверхности льда и длительность которых зависит от радиуса излучаемого кругового пространства ледовой поверхности, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда, выполнение съемки с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова, измерения в горизонтальной плоскости в режиме "линейные размеры", определение расстояний между двумя точками с известными координатами, согласно изобретению гидроакустическую аппаратуру размещают на управляемом подвижном морском объекте, приемно-излучающее устройство содержит параметрическую антенну и размещено на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала.
Достоинствами способа является то, что можно обследовать на максимальное заглубление киля на порядок больше торосов, выявить заглубленные выступы на нижней поверхности льда, расположенные по всей поверхности и не обнаруженные прямыми измерениями, а также оценить такую важную морфометрическую характеристику, как максимальное заглубление килей торосов.
Однако, при любой плотности точек истинное местоположение поверхности рельефа нижней поверхности ледяного поля, между точками измерения остается неизвестным. Истинная поверхность может лежать выше или ниже положения отрезка прямой (соответствующего ребру триангуляции), соединяющей две точки в трехмерном пространстве. Отклонение высот пропорционально расстоянию между точками, но не определено. Аналогичное утверждение будет верно относительно плоскости треугольника в трехмерном пространстве, образованного тремя смежными точками двумерной триангуляции. Более того, полностью точное представление поверхности рельефа для любой плотности точек измерения глубин принципиально невозможно вследствие фрактальности рельефа (Жуков Ю.Н Рельеф Земли как математический объект // Навигация и океанография. 2011, №33).
Задачей также известного технического решения является повышение достоверности съемки нижней поверхности ледяного покрова (патент RU №2549683 С2, 27.04.2015 [19]), которая решается за счет того, что в способе съемки нижней поверхности ледяного покрова, включающим размещение гидроакустической антенны, приемно-излучающего устройства в водной среде для получения картины видимой части исследуемого объекта - килей торосистых образований, изометрических морфоструктур поверхности дна ледового образования, производство экспозиций, которые привязаны к топопланам верхней поверхности льда и длительность которых зависит от радиуса излучаемого кругового пространства ледовой поверхности, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда, выполнение съемки с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова, в котором гидроакустическую антенну, приемно-излучающее устройство, выполненное в виде гидрофона, размещают на управляемом подвижном морском объекте, приемно-излучающее устройство размещают на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала, в котором для получения картины видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования), выполняют построение верхней и нижней границ триангулированных поверхностей, устанавливают степень искривленности и индекс элементарной формы каждого объема ледяного покрытия для каждого сектора поверхности рельефа, для полного отображения изменчивости склонов рельефа ледового образования в каждой точке поверхности определяют уклон поверхности как величину и направление градиента.
Устройство для реализации данного способа включает гидроакустическую антенну, приемно-излучающее устройство, выполненное в виде гидрофона, которое размещают на управляемом подвижном морском объекте, приемно-излучающее устройство размещают на поворотной платформе, имеющей три степени свободы.
Известные устройства имеют существенные преимущества при обследовании крупных ледовых образований, что оправдывает их сложную конструкцию. Однако иногда требуется обследовать, например, один или два айсберга, под воздействием ветра и течения попавшие в район с морским объектом хозяйственной деятельности, например, добычной платформы углеводородов.
При этом существенным недостатком известных устройств съемки нижней поверхности ледовых образований является сложность конструкции таких систем и их материально -техническое обслуживание.
Из известных технических решений наиболее близким является устройство, приведенное в источнике [2], которое выбрано в качестве прототипа.
Задачей предлагаемого технического решения является упрощение конструкции устройства съемки нижней поверхности ледовых образований, в частности одиноких айсбергов.
Поставленная задача решается за счет того, что в устройстве для съемки подводной поверхности айсберга, включающим средство гидроакустического зондирования гидросферы, работающие в полярной системе координат PSS-2, и конструктивно состоящее из антенны, немагнитной штанги с анкерным устройством, кабель - троса, поворотной платформы, прецизионного датчика вращения, двухканального приемопередатчика, станции обработки данных на базе портативного компьютера PENTIUM-11, мониторов, спутниковой навигационной системы GPS, системы электроснабжения, в отличие от прототипа немагнитная штанга выполнена двухсекционной, первая секция немагнитной штанги одним своим концом закреплена на палубе плавательного средства, посредством седла, второй конец первой секции немагнитной штанги сочленен со второй секцией немагнитной штанги, на противоположном конце которой на поворотной платформе установлена антенна многолучевого эхолота, работающая в режиме излучения EQUI-ANGLE, кабель-трос проложен внутри немагнитной штанги, станция обработки данных информационно сопряжена с судовым датчиком динамических перемещений, двумя GPS-компасами, с судовой НРЛС, на поворотной платформе параллельно антенне многолучевого эхолота установлен измеритель вертикального распределения скорости звука в воде.
Сущность изобретения поясняется чертежами, приведенными на фиг. 1-3.
Фиг. 1. Схема движения катера, где позициями обозначены: 1 - катер с оборудованием, 2 - айсберг.
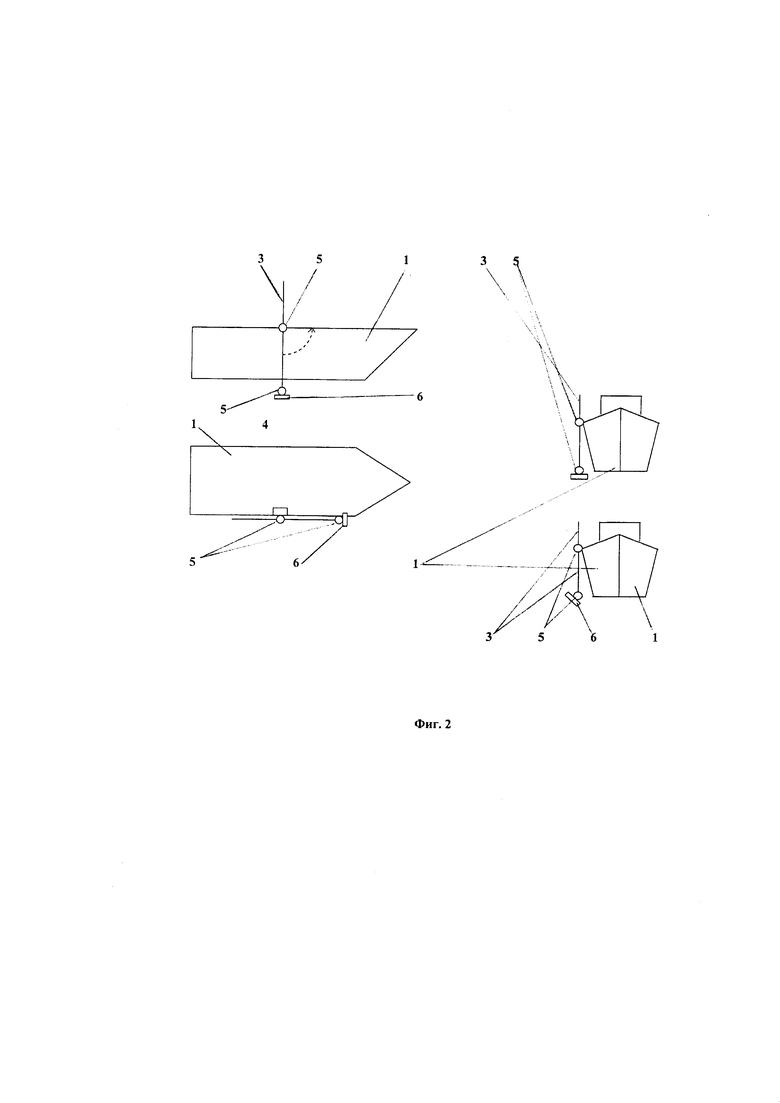
Фиг. 2. Положение устройства для съемки подводной поверхности айсберга: 1 - плавающее средство (катер), 3 - немагнитная штанга, 4 - седло, 5 - поворотное устройство, 6 - приемоизлучающее устройство многолучевого эхолота.
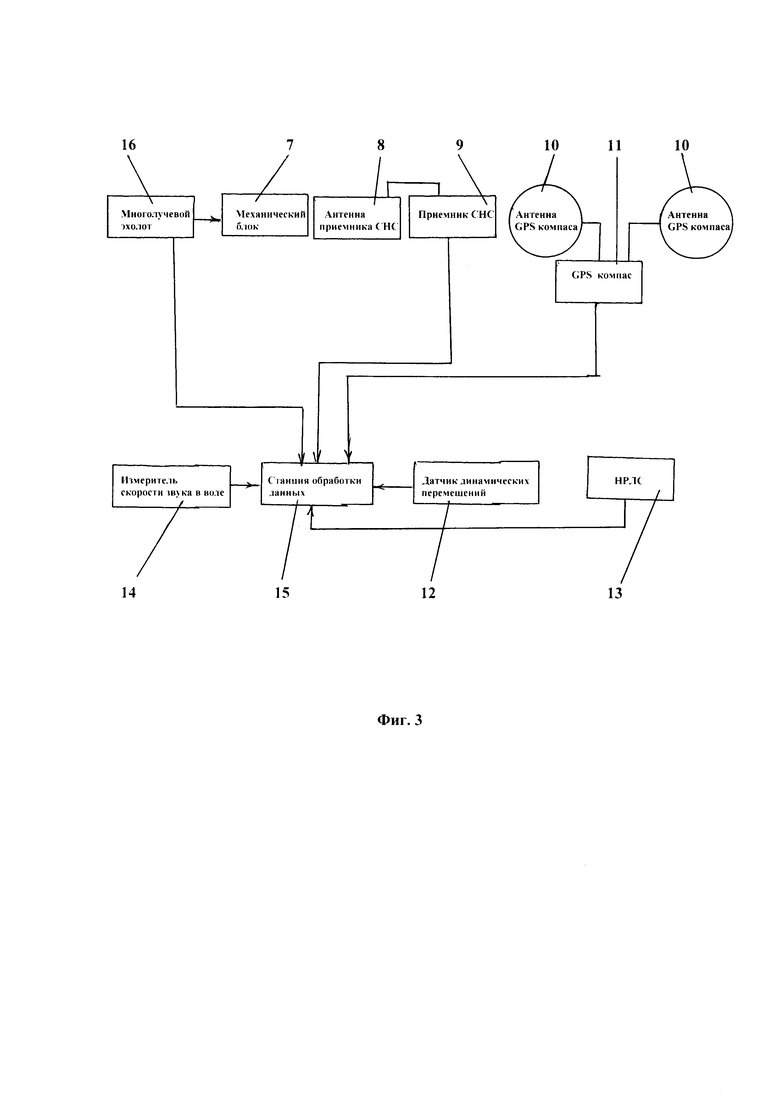
Фиг. 3. Блок - схема устройства: 7 - механический блок, 8 - антенна приемника СНС, 9 - приемник СНС, 10 - антенны GPS - компаса 11, 12 - датчик динамических перемещений, 13 - НРЛС, 14 - измеритель скорости звука в воде, 15 - станция обработки данных, 16 - многолучевой эхолот.
Состав технических средств для выполнения работ по съемке подводной поверхности айсберга, включает приемо-передающую антенну 8 приемника 9 СНС; две антенны 10 GPS-компаса 11; датчик динамических перемещений 12; измеритель вертикального распределения скорости звука в воде 14; многолучевой эхолот 16; станцию обработки данных 15 на базе портативного компьютера PENTIUM-11, сопряженную с НРЛС 13, механический блок 7, а также специализированное программное обеспечение.
Механический блок 7 включает немагнитную штангу, которая выполнена двухсекционной. Первая секция немагнитной штанги одним своим концом закреплена на палубе плавательного средства, посредством седла, второй конец первой секции немагнитной штанги сочленен со второй секцией немагнитной штанги, на противоположном конце которой на поворотной платформе установлена антенна многолучевого эхолота, работающая в режиме излучения EQUI-ANGLE, кабель-трос проложен внутри немагнитной штанги.
Многолучевой эхолот (МЛЭ) 16 обеспечивает выполнение съемки подводной части айсберга в цифровом виде.
Для выполнения съемки подводной поверхности айсберга в реальных условиях был применен МЛЭ типа Reson Sea Bat 7125 SV2, обеспечивающий получение наиболее качественного изображения подводной части айсберга, предназначенный для работы на малых глубинах (до 300 м), с частотой 400 кГц и более за одну посылку, с числом лучей не менее 200. При этом в процессе работ устанавливается режим излучения EQUI-ANGLE, в котором лучи распространяются с одинаковым углом между собой. В состав комплекса на базе МЛЭ Reson Sea Bat 7125 SV2, используемого в ходе эксперимента, входят следующие составные части: процессорный блок Reson 7125 SV2. Процессорный блок является интегрированным блоком управления и обработки, предназначен для формирования лучей и их последующей обработки с мониторами. Антенна предназначена для излучения и приема акустических лучей и преобразования полученных лучей в цифровой вид для их последующей передачи в процессорный блок. Основные характеристики антенны МЛЭ использовавшегося в ходе эксперимента: частоты, 400 кГц/200 кГц; разрешение по расстоянию 5 мм; сектор охвата 140°; максимальная дальность 200/500 м; ширина луча по направлению галса: 2,2 0 при 200 кГц; 0,54 0 при 400 кГц; количество лучей 256/512; частота следования импульсов до 50 Гц.
GPS-компас 11 (навигационная система позиционирования) обеспечивает непрерывное поступление навигационных данных в процессорный блок эхолота.
Используемая навигационная система позиционирования обеспечивает возможность определения координат с точностью установленной Стандартом Международной гидрографической организации для съемки рельефа дна S-44 пятое издание, февраль 2008 г. для выполнения работ по съемке рельефа дна.
В ходе выполнения экспериментальных работ для навигационной системы позиционирования установлен формат приема данных NMEA. Для работы в формате NMEA использовались следующие данные: широта; долгота; курс; скорость (может передаваться навигационной системой или рассчитываться с помощью программного обеспечения МЛЭ). При эксперименте применялся приемник SPS461, две антенны GA530, коммутационные кабеля). Основные характеристики: использование RTCM DGPS; встроенный Bluetooth, Ethernet; 72-канала L1 С/А Code, L1/L2; поддержка сервиса OmniSTAR VBS; рабочая температура -40°С to +65°С (-40°F to +149°F); питание 11 V DC to 28 V DC; поддержка 1 Pulse-per-second (1PPS).
Датчик динамических перемещений (ДДП) 12 обеспечивает определение и последующий учет поправок за крен, дифферент и рысканье катера по курсу.
Использование режима ДДП 12 обеспечивает точность определения крена и дифферента судна с среднеквадратическая ошибкой (СКО) не более 0.05°. Основные характеристики: рабочая температура: 0+40°C; температура хранения: -20+70°С; точность: 0,05°; ограничение по углу крена:±300; ограничение по углу дифферента:±300.
Измеритель вертикального распределения скорости звука 14 обеспечивает измерение вертикального распределения скорости звука (ВСРЗ) в воде по всем горизонтам от поверхности воды до дна. Полученные данные вводятся в МЛЭ в соответствии с положениями Инструкции по эксплуатации МЛЭ и Инструкции по использованию специализированного программного обеспечения (ПО).
Выбор вида измерителя производился, основываясь на глубинах обследуемых акваторий. При экспериментальных работах использован измеритель ВРСЗ «Valeport», обеспечивающий точность измерения скорости звука на менее 0,05 м/сек. Основные характеристики датчика измерения скорости звука «Valeport»: Диапазон: 1375-1900 м/сек Разрешение: 0,001 м/сек. Точность:±0,02 м/сек.
Посредством судовой НРЛС 12 выполнялось определение траектории перемещения айсберга под воздействием ветра и течения.
Программное обеспечение обеспечивает совместную обработку данных, поступающих от датчиков всего используемого оборудования, выполняет построение макета подводной части айсберга на основе полученных данных.
В эксперименте применялось специальное гидрографическое программное обеспечение (СГПО) PDS-2000, предназначенное для обработки данных полученных в ходе выполнения съемки рельефа дна многолучевым эхолотом. СГПО PDS-2000 интегрирует данные, поступающие со всех вспомогательных систем, выполняет сбор и обработку данных МЛЭ.
При выполнении эксперимента в качестве плавательного средства был использован разъездной катер научно-исследовательского судна (НЭС) «Академик Трешников», отвечающий указанным требованиям. Процесс оборудования плавательного средства включает в себя: изготовление штанги для крепления забортной антенны; изготовление «седла» для крепления штанги; изготовление площадки с поворотным блоком для крепления антенны на штангу под углом 45°; выбор места установки штанги; подгонку оттяжек для крепления штанги; сборку приемоизлучающей антенны МЛЭ с монтажом на штанге;
При этом штанга выполнена с двумя поворотными блоками.
Первый блок устанавливается в седло для крепления и обеспечивает поворот штанги вдоль борта на угол 90°, таким образом, чтобы при выполнении спуска/подъема катера с борта/на борт судна-носителя и дальних переходах штанга лежала на борту катера, а при выполнении работ опускалась в воду.
Данная конструкция даст возможность сэкономить время, затрачиваемое на постоянный монтаж штанги при спуске/подъеме катера и дальние переходы (скорость катера с антенной за бортом ограничена 4-5 узлами).
Второй блок устанавливается на конец штанги, погружаемый в воду, должен устанавливать площадку антенны для посылки лучей к дну и под углом 45° в сторону от борта катера.
Приемопередающая антенна устанавливается на маневренной штанге с правого (левого) борта на изготовленное седло.
На конце штанги находящимся в воде устанавливается специальное поворотное устройство для обеспечения поворота приемопередающей антенны МЛЭ под углом 45° в направлении от катера.
На крыше катере дополнительно были установлены две антенны GPS-компаса SPS-461 с расстоянием между антеннами 2,5 метра (данное расстояние позволяет GPS-компасу достоверно определять курс катера) и бензиновый генератор для энергообеспечения системы (220 В).
Перед началом проведения работ, связанных с определением морфологических характеристик айсберга выполнялась калибровка МЛЭ.
Калибровка МЛЭ проводилась каждый раз после установки забортного устройства, непосредственно перед началом выполнения работ.
Калибровка выполнялась с целью выявления и устранения систематических погрешностей в работе эхолота. При выполнении калибровки МЛЭ использовалась штатная утилита Multibeam Calibration/Multibeam Patch Test ПО «PDS-2000».
В ходе калибровки выполнялись следующие действия:
Определение поправок «Roll», Pitch, Heading (Yaw):
Для определения поправки Roll (крен) катер проходил по одному галсу с ровным участком рельефа дна в противоположных направлениях с одинаковой скоростью на глубинах около 500 м. По результатам определялась поправка Roll.
Для определения поправки Pitch (дифферент) катер проходил по одному галсу с отличительной особенностью рельефа (склону) дна в противоположных направлениях с одинаковой скоростью. По результатам определялась поправка Pitch.
Для определения поправки Heading (Yaw) (рысканье, курс) катер проходил по двум параллельным галсам в одном направлении с отличительной особенностью рельефа дна с одинаковой скоростью.
По результатам определялась поправка Heading (Yaw) (рысканье, курс). В ходе эксперимента результаты калибровки были введены в МЛЭ перед началом работ по обследованию подводной части айсберга.
Оптимальная дистанция между катером и айсбергом в ходе выполнения съемки, обеспечивающая наиболее качественное изображение подводной части айсберга, составляет от 20 до 50% рабочей глубины используемого МЛЭ.
Также выполнялся учет поправки за вертикальное распространение скорости звука в воде. Перед началом выполнения работ по обследованию подводной части айсберга выполнялось определение параметров ВРСЗ от поверхности воды до дна. Полученные данные вводились в МЛЭ в соответствии с положениями Инструкции по эксплуатации МЛЭ и Инструкции по использованию специализированного ПО (в ходе эксперимента PDS-2000).
Полученный профиль скорости звука в воде использовался для учета поправки за скорость распространения звука в воде.
Определение координат плавательного средства выполнялось в общеземной геоцентрической системе координат ПЗ-90.11.
Определение координат осуществлялось с помощью спутниковой навигационной системы (СНС) т к. получаемые с приемников СНС данные адаптированы для обработки с применением специализированного гидрографического ПО одновременно с обработкой данных МЛЭ (в ходе осуществления эксперимента применялось ПО PDS-2000).
В случае нахождения района выполнения работ в зоне действия дифференциальной станции СНС дифференциальные поправки к определяемым координатам определялись по данным дифференциальной станции.
При использовании для определения координат спутниковых навигационных приемников способных обеспечить выработку координат в режиме RTK (Real Time Kinematic -«кинематика реального времени»), использовался данный режим.
Полученные координаты обрабатывались совместно с данными МЛЭ и НРЛС, посредством специализированного ПО.
Точность определения координат при выполнении работ по обследованию подводной части айсберга не превышала нижнего предела установленного стандартом S-44 Международной гидрографической организации для съемки рельефа дна (S-44 пятое издание. Специальное издание №44, февраль 2008 г.).
При движении катера вокруг обследуемого айсберга, катер двигался по описанной вокруг айсберга окружности, бортом к обследуемому айсбергу. При этом выполнялось не менее двух обходов со скоростью 3-4 узла: 1-й обход на дистанции 40-60 метров, 2-й обход на дистанции 70-120 метров в зависимости от геометрии подводной части айсберга, определяемой МЛЭ (фиг. 1).
Сбор и последующая обработка данных во время съемки осуществлялась с помощью специального гидрографического программного обеспечения.
Обследование айсберга посредством МЛЭ осуществлялась на частоте излучения не менее 400 кГц в режим излучения EQUI-ANGLE. В данном режиме лучи распространяются с одинаковым углом между собой, что дает преимущества при работе на расчлененном рельефе (в данном случае при обследовании подводной части айсберга).
В результате съемки многолучевым эхолотом подводных частей айсбергов с помощью ПО PDS-2000 получают исходные данные в формате *.pds.
По полученным данным определяют, какие айсберги в момент обследования находятся на мели, а какие в дрейфе.
Используя приложения «TIN model» и «Cross sections and volume» специализированного ПО определяются геометрические размеры подводной части айсберга и площади соприкосновения с грунтом.
В результате обработки получается модель подводной части айсберга («облако точек» с координатами х, у, z).
Для экспорта «облака точек» с помощью ПО PDS-2000 создается grid-модель. Далее, используя ПО PDS-2000 выполняется расчет объема подводной части айсберга.
Посредством программ AutoCad Civil 3D и/или Surfer выполняется построение 3D модели подводной части айсберга.
Для определения объема подводной части айсберга, сидящего на грунте, исходные данные в формате*.pds. делятся на две группы точек, условно названных дно и айсберг. Из этих групп точек строятся две grid-модели и выполняется интерполяция моделей в местах их соприкосновения:
При этом во вкладке Operations указываются две, заранее созданные, grid-модели поверхностей дна и айсберга. Поверхность дна определялась программой как отсчетная, на нее накладывалась поверхность айсберга, и в дальнейшем осуществлялся расчет объема подводной части айсберга.
В результате расчета объема подводной части айсберга программой PDS-2000 автоматически формируется электронный отчет (report) в формате*.pdf.
Расчет повторяется для каждого из обследуемых айсбергов по отдельности.
После создания grid-модель 2D, «облако точек» записывается и сохраняется в формате *.asc.
При записи и сохранении «облака точек» в процессе эксперимента использовалось ПО PDS-2000. В ПО PDS-2000 использовалась вкладка ASCII Export для экспорта данных в формате *.asc.
Формат *.asc. является унифицированными, его можно использовать для построения 3D моделей в сторонних программах. В данном случае для построения 3D моделей подводных частей айсбергов были использованы программы AutoCad Civil 3D и Surfer.
Для построения 3D модели подводной части айсберга точки в формате *.asc, созданные в ПО PDS-2000, импортируются в программу AutoCad Civil 3D, и создается свой файл точек в формате *.txt.
После того, как создан свой формат файла точек, в окне программы появляется множество точек в 2D изображении. В этом же окне можно просматривать, созданные точки и в 3D изображении.
При просмотре 3D изображения точек модель подводной части айсберга выглядит не полноценной. Поэтому точки объединяются в единую группу и создается поверхность (цифровая модель).
Для более качественного просмотра 3D модели подводной части айсберга в программе AutoCad Civil 3D предусмотрена вкладка «Просмотр объекта».
В данной вкладке объект можно просматривать и вращать, а также изменять отображение поверхности
Промышленная реализация предлагаемого технического решения сложности не представляет, так как предлагаемый способ может быть реализован на серийно выпускаемой аппаратуре.
Источники информации
1. Гудошников Ю.П., Козлов Д.Н., Кубышкин Н.В. Водолазные исследования торосов и стамух в Баренцевом море в 2003 г. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе СПб. 2004. Труды ААНИИ. Том 449, с. 238-246.
2. Гидролокационная съемка нижней поверхности ледяного покрова / Зубакин Г.К., Криницкий П.И., Гудошников Ю.П. и др. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе, СПб. 2004. Труды ААНИИ. Том 449, с. 229-237.
3. Патент FR №2431137.
4. Патент FR №2509869.
5. Патент DE №2481791.
6. Патенты GB №1418614.
7. Патент GB №1486068.
8. Патент US №4596007.
9. Патент US №4603408.
10. Патент US №4605140.
11. Авторское свидетельство SU №747313.
12. Авторское свидетельство SU №1060033.
13. Авторское свидетельство SU №688104.
14. Патент US №4287580.
15. Клей К., Медвин Г., "Акустическая океанография. Основы и применения", - М.: Мир, 1980, стр. 580.
16. Alok K. Chaturvedi and Les A. Piegl, "Procedural method for terrain surface interpolation", Comput. and Graphics, Vol.20, No.4, pp.541-566, 1996.
17. Elsevier Science Ltd. J.J. Koenderink and A.J. van Doom, "Surface Shape and Curvature Scales"; Image and Vision Computing, vol. 10, no. 8, pp. 557-565, 1992.
18. Патент RU №24444760 C1, 10.03.2012.
19. Патент RU №2549683C2, 27.04.2015.
Использование: изобретение относится к области гидролокации и может быть использовано при съемке нижней поверхности ледяного покрова на морских акваториях, в том числе и на шельфе в условиях высоких широт. Сущность: устройство для съемки подводной поверхности айсберга включает средство гидроакустического зондирования гидросферы, работающее в полярной системе координат PSS-2, и конструктивно состоящее из антенны, немагнитной штанги с анкерным устройством, кабель-трос, поворотную платформу, прецизионный датчик вращения, двухканальный приемопередатчик, станцию обработки данных на базе портативного компьютера, мониторы, спутниковую навигационную систему GPS, систему электроснабжения. При этом немагнитная штанга выполнена двухсекционной, первая секция немагнитной штанги одним своим концом закреплена на палубе плавательного средства, посредством седла, второй конец первой секции немагнитной сочленен со второй секцией немагнитной штанги, на противоположном конце которой на поворотной платформе установлена антенна МЛЭ, работающая в режиме излучения EQUI-ANGLE, кабель-трос проложен внутри немагнитной штанги, станция обработки данных информационно сопряжена с судовым датчиком динамических перемещений, двумя GPS-компасами, с судовой НРЛС, на поворотной платформе параллельно антенне МЛЭ установлен измеритель вертикального распределения скорости звука в воде. Технический результат: упрощение конструкции устройства съемки нижней поверхности ледовых образований, в частности, одиноких айсбергов. 3 ил.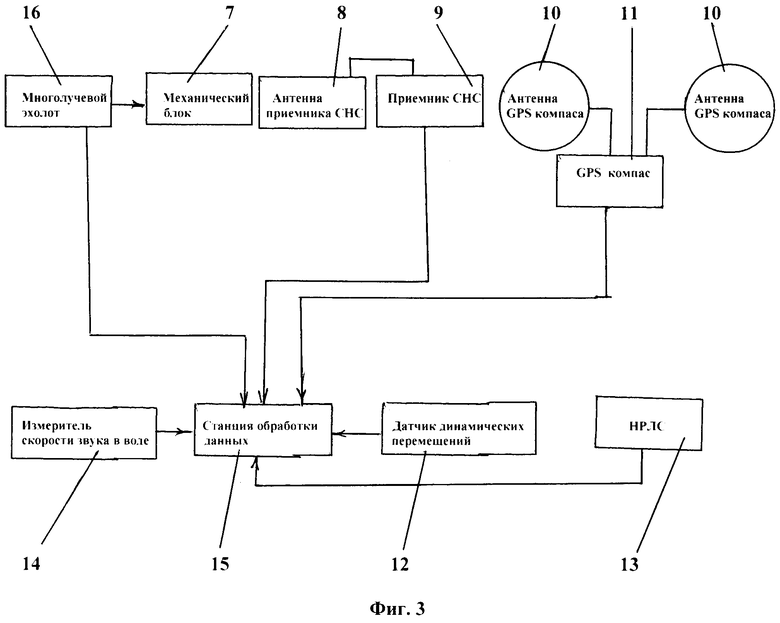
Устройство для съемки подводной поверхности айсберга, включающее средство гидроакустического зондирования гидросферы, работающее в полярной системе координат PSS-2, и конструктивно состоящее из антенны, немагнитной штанги с анкерным устройством, кабель-трос, поворотную платформу, прецизионный датчик вращения, двухканальный приемопередатчик, станцию обработки данных на базе портативного компьютера, мониторы, спутниковую навигационную систему GPS, систему электроснабжения, отличающееся тем, что немагнитная штанга выполнена двухсекционной, первая секция немагнитной штанги одним своим концом закреплена на палубе плавательного средства, посредством седла, второй конец первой секции немагнитной штанги сочленен со второй секцией немагнитной штанги, на противоположном конце которой на поворотной платформе установлена антенна многолучевого эхолота, работающая в режиме излучения EQUI-ANGLE, кабель-трос проложен внутри немагнитной штанги, станция обработки данных информационно сопряжена с судовым датчиком динамических перемещений, двумя GPS-компасами, с судовой НРЛС, на поворотной платформе параллельно антенне многолучевого эхолота установлен измеритель вертикального распределения скорости звука в воде.
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2013 |
|
RU2549683C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕДОВОГО ТОРОСА | 2000 |
|
RU2189006C2 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2444760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЭХОЛОКАЦИЕЙ | 2004 |
|
RU2266551C1 |
| Гидролокационная съемка нижней поверхности ледяного покрова | |||
| Зубакин Г.К., Криницкий П.И., Гудошников Ю.П | |||
| и др | |||
| Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе | |||
| - СПб., 2004, | |||

