Настоящее изобретение относится к области двигателей и, в частности, акустическому обнаружению нарушения работы двигателя, установленного на летательном аппарате.
Известны средства акустического обнаружения нарушения работы двигателя, например, посредством идентификации частотных характеристических линий типовых дефектов в ответном акустическом сигнале при возбуждении, как предложено в заявке на патент ЕР 1205749, для проверки повреждения турбинной лопатки.
В то же время, применение активного контроля шума к двигателям летательных аппаратов, в частности, в примере, описанном настоящим заявителем для сокращения уровня шума винта турбовинтового двигателя летательного аппарата с двойным воздушным винтом противоположного вращения в его заявке на патент FR 2972710, позволяет разработать активные системы для акустического ослабления шума двигателя для окружающей его среды. Такая система производит звуковой сигнал воздействующими устройствами таким образом, что он комбинируется с шумом, испускаемым двигателем, называемым здесь первичным шумом, для устранения шума, воспринимаемого в целевых зонах пространства.
Для устройства мониторинга за работой двигателя эти активные системы акустического ослабления обладают недостатком, заключающимся в маскировании характеристических шумов нарушений работы. Зная, что шумы от нарушений работы, за которыми хотят следить, содержат характеристические частоты, податель сего разработал способ мониторинга, заключающийся в дезактивировании системы активного контроля шума в узких полосах частот вокруг этих характеристических линий, который описан в заявке на патент FR 1153076, поданной 8 апреля 2011 г.
Этот способ представляет несколько недостатков. Он требует не снижать в шуме двигателя гармоники, которые контролирует устройство мониторинга. Это приводит к снижению параметров активной системы ослабления шума, поскольку не все гармоники двигателя, и среди них наиболее значительные, снижаются.
Кроме того, контуры управления систем активного контроля очень требовательны в настройке, а их чувствительность является решающей. Для минимизации уровня шума и для эффективной идентификации нарушений работы, интервалы частот, в которых шум не сокращается вокруг характеристических линий, ограничиваются за счет встраивания узкополосных фильтров в контур регулирования активного контроля, что приводит к значительным разностям фаз, которые рискуют дестабилизировать систему. В некоторых конфигурациях применение этого способа может сильно снизить характеристики снижения шума системы активного контроля, даже привести к ее нестабильности. Эта проблема может быть особенно чувствительной, если пытаются применить способ к системе активного контроля, действующей в режиме “Feed back” (c обратной связью), выходные данные которой используются для корректировки команд от воздействующих устройств.
Наконец, когда этот способ используется с системой активного контроля, работающей в режиме “Feed fоrward” (без обратной связи), входные данные которой принимаются на входе без взаимодействия с целями сокращения шума, он требует использования дополнительного средства регистрации шумов.
Изобретение преследует цель препятствовать помехам в работе системы активного контроля, не требует ограничений характеристик для ослабления шума и ни в каких случаях не вводит использование вторичных средств регистрации шума.
С этой целью, изобретение касается способа акустического обнаружения, по меньшей мере, одного нарушения (DYS) работы двигателя, причем двигатель создает один первичный шум Ро, который обрабатывают системой активного контроля шума, посылая на цели сокращения шума акустический сигнал Рс, производимый, по меньшей мере, одним воздействующим устройством и связанный посредством передаточной функции Н с сигналом Y, производимым упомянутой системой активного контроля шума, причем упомянутое нарушение (DYS) работы имеет акустическую сигнатуру, идентифицируемую в первичном шуме Ро на целях сокращения шума, отличающегося тем, что он включает в себя следующие этапы:
- Получение упомянутого сигнала Y, производимого системой активного контроля;
- Идентификация возможного появления нарушения работы посредством средства мониторинга, которое использует знание об Y и Н и посылает, при необходимости, аварийное сообщение.
В частном варианте осуществления, система активного контроля шума оценивает изменения передаточной функции Н во времени, которые являются предметом получения и используются на этапе идентификации.
Предпочтительно, сигнал Y состоит из совокупности сигналов управления воздействующими устройствами, а средство мониторинга анализирует первичный шум, восстановленный, исходя из знания об Y и Н, для идентификации в нем шума возможных нарушений работы, исходя из характеристических гармоник.
Когда передаточная функция между сигналом Y и целями сокращения шума считается стабильной и не пересматривается в ходе работы, предпочтительный вариант осуществления способа использует ее в качестве элемента данных на этапе идентификации. Напротив, если передаточная функция пересматривается системой активного контроля шума, например, из-за смены режима двигателя, вариант осуществления способа, адаптированный к такой ситуации, включает в себя получение временных изменений этой передаточной функции помимо сигнала Y для их использования на этапе идентификации.
Преимущественно, вариант осуществления способа ограничивает вычисления этапа идентификации до характеристических частот, подлежащих мониторингу. В этом случае промежуточный этап между получением и идентификацией извлекает сокращенные показатели на сигналах управления и передаточной функции (гармоники, используемые при вычислениях для восстановления первичного шума на характеристических частотах). Использование сокращенных показателей значительно облегчает вычислительную нагрузку и обеспечивает обработку в реальном времени с вычислительными средствами, находящимися на установке, включающей в себя двигатель.
В дополнительном варианте контрольный сигнал шума, а также временное изменение состояние передаточной функции передаются на землю для более полного анализа. Это позволяет дополнительно облегчить нагрузку на установленные вычислительные средства.
Изобретение касается также устройства акустического обнаружения, по меньшей мере, одного нарушения (DYS) работы двигателя, причем двигатель создает первичный шум Ро, выполненного с возможностью его использования при наличии системы активного контроля шума, которая посылает к целям сокращения шума акустический сигнал Рс, производимый, по меньшей мере, одним воздействующим устройством и связанный посредством передаточной функции Н с сигналом Y, подаваемым упомянутой системой активного контроля шума, причем упомянутое нарушение (DYS) работы имеет акустическую сигнатуру, идентифицируемую в первичном шуме Ро на целях сокращения шума, отличающегося тем, что оно содержит:
- средство получения сигнала Y, производимого системой активного контроля;
- средство мониторинга, выполненное с возможностью идентификации возможного появления нарушения (DYS) работы, исходя из сигнала Y и знания о передаточной функции Н, и для передачи, при необходимости, аварийного сообщения.
Средство получения вышеупомянутого устройства выполнено с возможностью сбора от системы активного контроля шума изменений передаточной функции, которые оно оценивает во времени, и средство мониторинга этого устройства выполнено с возможностью использования упомянутых изменений передаточной функции.
Согласно частному варианту осуществления изобретения средство получения сигнала Y содержит индуктивные датчики на управляющих кабелях воздействующих устройств, способные получать сигналы управления.
Согласно другому частному варианту осуществления изобретения устройство акустического обнаружения нарушений работы двигателя содержит между средством получения и средством мониторинга, средство извлечения сокращенных показателей с компонентами Y и Н для частот, характерных для идентификации шума от нарушения (DYS) работы, на ограниченной совокупности характеристических частот.
Средство мониторинга вынесено и содержит средства дистанционной передачи между средствами, установленными на устройстве, и вынесенным средством мониторинга.
Устройство акустического обнаружения нарушения работы может быть приспособлено к существующей системе активного сокращения шума. Оно не требует изменения правил контроля, ни дополнительной интрузивной контрольно-измерительной аппаратуры. Если система активного контроля шума не снабжена средствами дублирования сигналов управления в целях электронного мониторинга, называемого мониторингом, для получения этих сигналов могут оказаться достаточными обычные индуктивные датчики на управляющих кабелях воздействующих устройств.
Преимущественно устройство будет дополнено средствами для выполнения представленных выше различных вариантов осуществления способа.
Изобретение будет лучше понято, благодаря более подробному описанию варианта осуществления со ссылкой на прилагаемые чертежи, на которых:
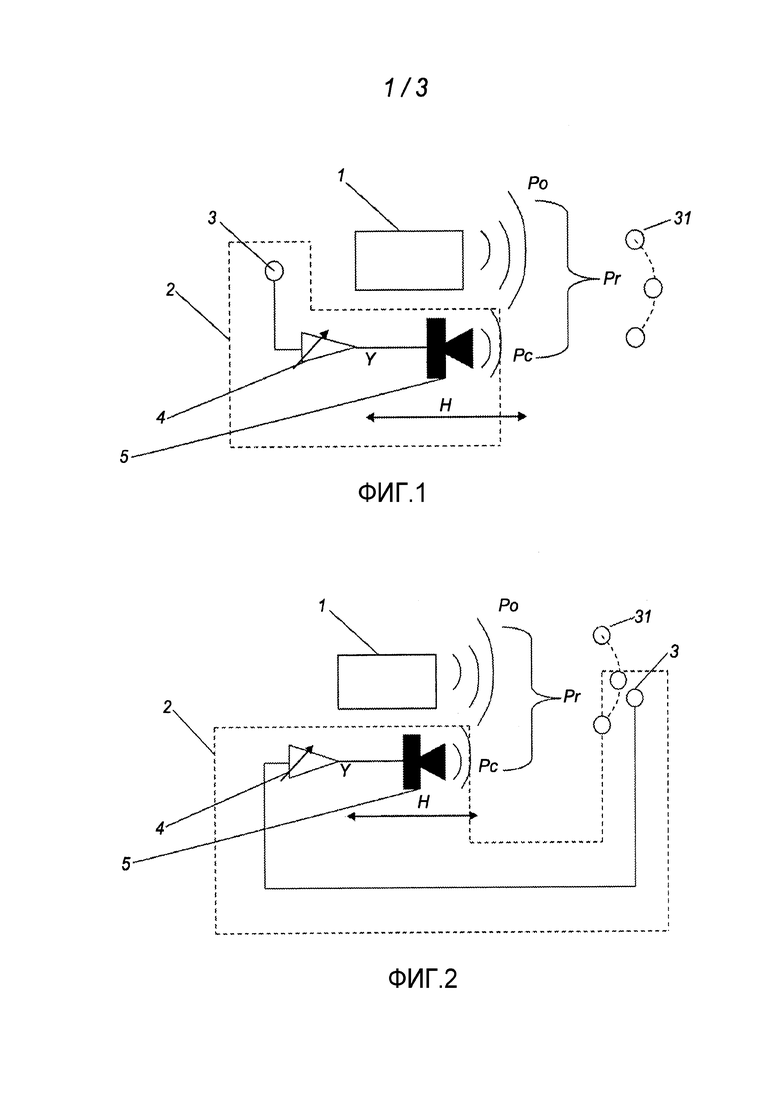
Фиг.1 схематически представляет способ сокращения шума с помощью системы активного контроля “Feed-forward”;
Фиг.2 схематически представляет способ сокращения шума с помощью системы активного контроля “Feed-back”;
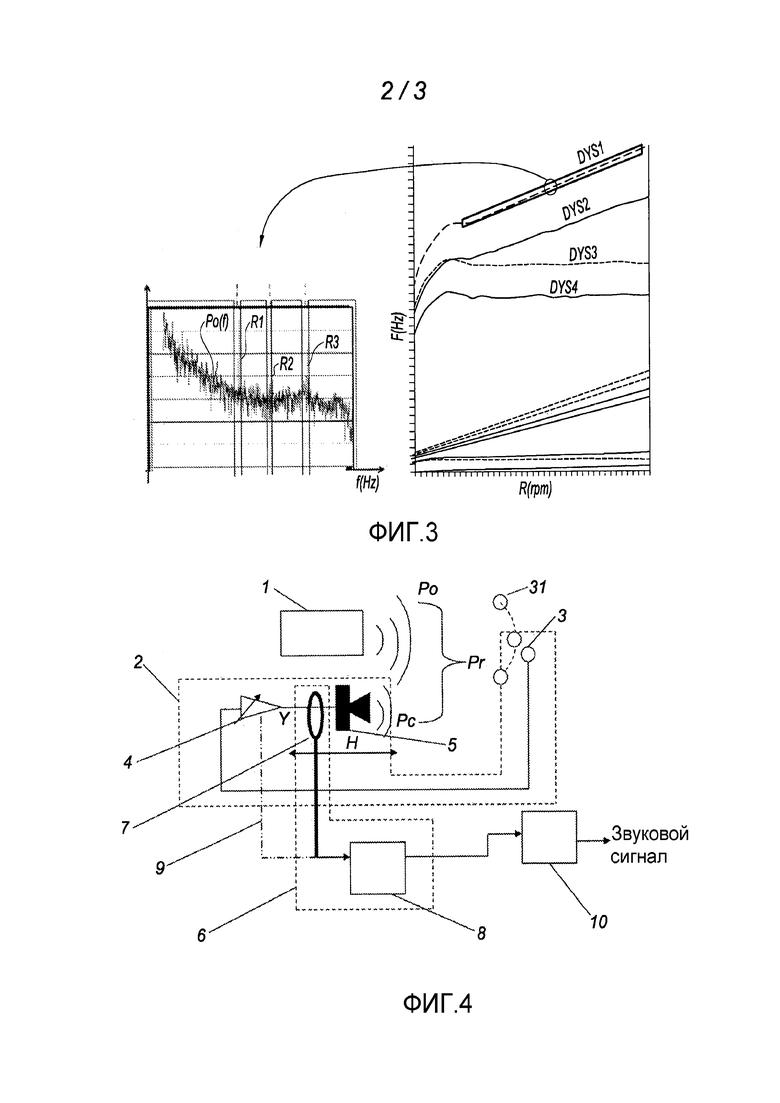
Фиг.3 схематически представляет связь между характеристическими частотными полосами некоторых нарушений работы и режимом двигателя;
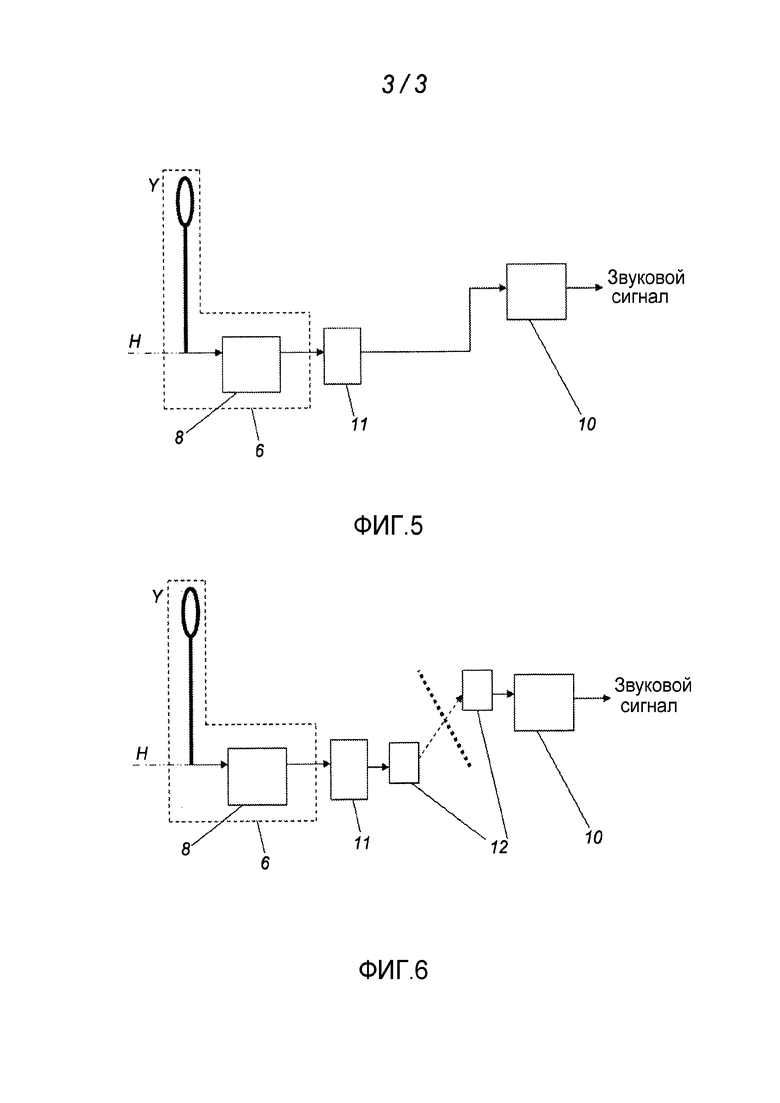
Фиг.4 схематически представляет работу устройства акустического обнаружения некоторых нарушений работы двигателя по изобретению в случае системы активного контроля “Feed-back”.
Фиг.5 схематически представляет обработку информации по варианту изобретения;
Фиг.6 схематически представляет обработку информации по второму варианту изобретения;
Фиг.1 схематически представляет принцип сокращения шума для двигателя на установке, снабженной системой активного контроля Feed-Forward. Установка может быть транспортным средством, например, летательным аппаратом, даже испытательным стендом. Сокращение шума касается зоны пространства, который обычно выбирается очень протяженной. Внутри этой зоны могут регистрировать шум, воспринимаемый в местах, называемых целями сокращения шума.
Двигатель 1 испускает первичный шум, соответствующий акустическому сигналу Ро, на цели сокращения шума 31. Система активного контроля шума 2 по известному уровню создает, благодаря одному или нескольким воздействующим устройствам 5, другой шум, соответствующий сигналу Рс, на цели сокращения шума, так что воспринимаемый шум Pr, посредством сложения сигналов Ро и Рс, остается с интенсивностью ниже адекватного уровня. Для получения такого результата, система активного контроля в варианте “Feed-forward” использует датчики данных 3 о работе двигателя, которые не влияют вместе с результатом на воспринимаемый шум Pr, и рассчитывает с помощью алгоритма, внедренного в вычислительное устройство 4, сигналы управления, направляемые к воздействующим устройствам 5, чтобы они производили сигнал Рс к целям сокращения шума. Термин сигнал Y будет использоваться в настоящем документе для представления совокупности сигналов управления воздействующими устройствами в том случае, когда их имеется несколько; в этом случае сигнал Y имеет, следовательно, несколько компонентов.
Можно отметить на этой стадии, что, по определению, в частотной полосе, в которой система активного контроля эффективна, воспринимаемый шум - слабый, и, следовательно, шум Рс, испускаемый воздействующими устройствами к целям сокращения шума, дает непосредственно эффективную оценку сигнала первичного шума Ро с помощью сдвига фаз. Кроме того, знание контрольных сигналов от воздействующих устройств дает непосредственно доступ к Рс через передаточную функцию Н, которая учитывает ответный сигнал воздействующих устройств и передачу их акустического сигнала к целям сокращения шума. Наконец, имеется эффективная оценка этой передаточной функции, так как система активного контроля шума использует ее либо как входной элемент данных, либо посредством внутренней оценки.
Предпочтительный вариант осуществления изобретения использует, таким образом, оценку первичного шума двигателя на целях сокращения шума путем расчета шума Рс непосредственно из сигнала Y, производимого системой активного контроля шума, посредством матричной комбинации с передаточной функцией Н, которая может быть отмечена в частотной области:
Pci = Yk.Hki (1),
где Pci и Yk - компоненты сигналов Рс и Y на частотах i и k, а Hki - матричное разложение передаточной функции Н на расчетных частотах.
Фиг.2 схематически представляет принцип сокращения шума для двигателя в установке, снабженной системой активного контроля, посредством системы активного контроля “Fedd-back”. Основное отличие по сравнению с фиг.1 заключается в положении датчика 3, который в этом случае подает в систему активного контроля информацию о воспринимаемом шуме. Это отличие является важным, так как оно позволяет разработать более эффективные системы сокращения шума, но ценой возросшей сложности алгоритма, используемого в вычислительном устройстве 4. Примечательно, однако, что такое расположение не меняет описанное выше уравнение между сигналами воздействующих устройств и сигналом на цели сокращения шума.
Фиг.4 представляет принципиальную схему первого варианта осуществления способа по изобретению для акустического обнаружения нарушений работы двигателя 1, снабженного системой активного контроля шума 2.
Средство получения 6 сигнала Y использует предпочтительно индуктивные датчики вокруг кабелей управления воздействующих устройств 5, способных регистрировать этот сигнал. Оно обычно дополняется электронным блоком 8, который позволяет преобразовывать сигнал датчиков в цифровой сигнал, который может использоваться средством мониторинга 10.
Получение сигнала Y является неинтрузивным в том смысле, что он не имеет никакого влияния на работу системы активного контроля шума 2. Если система активного контроля 2 снабжена выводом, подающим сигнал Y, то простое ответвление составит, например, упрощенный вариант осуществления этапа получения.
Сигнал Y имеет столько скалярных компонентов, сколько имеется воздействующих устройств 5. В данном примере Y соответствует сигналу, непосредственно направляемому к воздействующим устройствам, но это не является ограничительным. Например, в варианте способа будет использоваться сигнал к внутреннему компоненту системы активного контроля шума на входе, передаточная функция которого к воздействующим устройствам определена.
Когда передаточная функция Н между воздействующими устройствами и контрольными сигналами считается стабильной и не пересматривается в ходе работы системы активного контроля шума 2, алгоритм средства мониторинга 10 двигателя, которое идентифицирует нарушения работы, посылает аварийный сигнал, в случае необходимости, питаемый лишь от сигналов Y управления датчиков, поступающих от средства получения 6. В частном варианте осуществления первичный шум от двигателя, который воспринимался бы целями сокращения шума в отсутствии активного контроля, восстанавливается по формуле (1), матричной комбинацией между сигналом Y управления и передаточной функцией Н, которая является элементом данных, зарегистрированным в вычислительном устройстве средства мониторинга 10.
Для осуществления акустического обнаружения нарушения (DYS) работы в двигателе, исходя из восстановленного шума двигателя, средство мониторинга 10 использует характеристики акустической сигнатуры упомянутого нарушения работы, которые могут быть извлечены из этого шума. Известным для двигателей образом, каждому наблюдаемому нарушению DYS работы может быть привязана, по меньшей мере, одна линия R1 с характеристической частотой. На левом графике фиг.3 показано, каким образом дефект DYS1 может вводить в спектр шума двигателя заданного режима линию R1, а также возможно, одну или несколько гармоник, таких как R2 или R3. Известные для специалиста алгоритмы позволяют изолировать эти линии в спектре шумов и привязать их к событию, которое хотят идентифицировать. Возможно, например, применить способ, используемый в заявке на патент FR 1153076, заключающийся в оценке силы излучения в узкой частотной полосе вокруг характеристической линии (изображенной на фиг.3), затем в идентификации сигнатуры нарушения DYS работы при превышении фиксированного порога. Специалист сможет, исходя из этих данных, проследить возможное появление нескольких нарушений, соответствующих совокупностям конкретных характеристических частот. Возможно будет также адаптировать эти алгоритмы, если характеристические частоты этих нарушений работы изменятся, особенно в зависимости от режима двигателя, как показано в правом графике фиг.3. Средство мониторинга снабжается после этого конкретными алгоритмами, чтобы определить, включает ли оно или нет аварийные сигналы в зависимости от идентифицированных нарушений работы.
Когда передаточная функция Н изменяется во времени и когда она пересматривается вычислительным устройством 4 системы активного контроля шума двигателя, в предпочтительном варианте осуществления средство получения 6 собирает информацию об изменениях передаточной функции Н, например, посредством ответвления 9 к вычислительному устройству 4. В этом варианте осуществления средство мониторинга 10 применяет в принципе тот же метод матричной комбинации Y и Н в каждый момент, как и ранее, но с более значительным объемом вычислений, чем, когда передаточная функция является стабильной.
Ответвление 9, противоположно регистрации сигнала Y управления, может потребовать опционной адаптации системы активного контроля 2.
На фиг.4 представлен принцип действия с системой активного контроля типа “Feed-back”, но устройство акустического обнаружения нарушений работы действовало бы таким же образом с системой активного контроля типа “Feed-forward”, так как оно не является помехой для работы вычислительного устройства 4.
Согласно преимущественному варианту осуществления, преобразование в частотные компоненты сигнала Y изменений передаточной функции Н, при необходимости, осуществляется скорее в средстве получения 6, чем в средстве мониторинга 10. Такое неограничивающее расположение будет использовано, в частности, для выполнения варианта способа, использующего сокращенные показатели о сигнале Y и об изменениях передаточной функции.
В этом варианте средство мониторинга 10 восстанавливает первичный шум только на малом числе характеристических частот, достаточных для идентификации критических нарушений работы. Поэтому на входе ему необходима лишь информация, касающаяся Y и Н, на ограниченном числе частот для восстановления шума на характеристических частотах. Такая информация называется здесь сокращенные показатели. В частном варианте осуществления, описанном на фиг.5, промежуточное средство осуществляет этап извлечения этих сокращенных показателей из средства получения 6.
Этот вариант позволяет ограничить вычислительную мощность для средства мониторинга за работой двигателя. Для еще большего ограничения потребности в вычислительной мощности на летательном аппарате, например, один вариант способа заключается в выносе на землю средства мониторинга 10 за нарушениями работы. Соответствующий вариант осуществления, представленный на фиг.6, содержит дистанционные средства передачи 12, встроенные между средством извлечения 11 и вынесенным средством мониторинга.
Другое средство для ограничения вычислительной мощности и увеличения надежности обнаружения заключается в обнаружении повторяющихся интервалов работы (в 11) и выполнении гармонических и передающих средств извлечения на земле только в течение этих единственных интервалов работы, называемых “Operating Modes”.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ АКУСТИЧЕСКОГО АНАЛИЗА МАШИНЫ | 2014 |
|
RU2669128C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ШУМОВ В ПАССАЖИРСКОМ САЛОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2504025C2 |
| РЕГУЛИРОВАНИЕ ПОДАЧИ ГАЗА ИЛИ ЛЕКАРСТВЕННОГО ПРЕПАРАТА ПАЦИЕНТУ | 1997 |
|
RU2197281C2 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА | 2015 |
|
RU2592741C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АНАЛИЗА СИГНАТУРЫ СИГНАЛА ДЛЯ РЕГИСТРАЦИИ СОБЫТИЙ В УСТАНОВКЕ С ВРАЩАЮЩИМИСЯ ДЕТАЛЯМИ | 2006 |
|
RU2418278C2 |
| СПОСОБ РЕГИСТРАЦИИ И АНАЛИЗА СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ | 2014 |
|
RU2570592C1 |
| ПАССИВНО-АКТИВНЫЙ АКУСТИЧЕСКИЙ МЕТОД ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА В ГАЗОЖИДКОСТНОЙ СРЕДЕ | 2015 |
|
RU2584721C1 |
| МЕТОД ПАССИВНОГО АКУСТИЧЕСКОГО МОНИТОРИНГА ПРИДОННЫХ ГАЗОЖИДКОСТНЫХ ПОТОКОВ | 2013 |
|
RU2521717C1 |
| СПОСОБ АКТИВНОГО ГАШЕНИЯ АКУСТИЧЕСКОГО ШУМА (ВАРИАНТЫ) | 2024 |
|
RU2836417C1 |
| ДИАГНОСТИКА ПРОЦЕССА | 2004 |
|
RU2324171C2 |
Настоящее изобретение касается способа акустического обнаружения по меньшей мере одного нарушения (DYS) работы двигателя, причем двигатель создает первичный шум Ро, который обрабатывается системой активного контроля шума, посылая на цели сокращения шума акустический сигнал Рс, производимый по меньшей мере одним воздействующим устройством и связанный передаточной функцией Н с сигналом Y, производимым упомянутой системой активного контроля шума, причем упомянутое нарушение (DYS) работы имеет акустическую сигнатуру, которая может быть идентифицирована в первичном шуме Ро на целях сокращения шума, отличающегося тем, что он включает в себя следующие этапы: получение упомянутого сигнала Y, производимого системой активного контроля; идентификация возможного появления нарушения работы с помощью средства слежения, которое обрабатывает знание об Y и о Н и подает, при необходимости, аварийное сообщение. Технический результат – уменьшение помех в работе системы активного контроля и повышение надежности акустического обнаружения по меньшей мере одного нарушения работы двигателя. 2 н. и 9 з.п. ф-лы, 6 ил.
1. Способ акустического обнаружения по меньшей мере одного нарушения (DYS) работы двигателя (1), причем двигатель создает первичный шум Ро, который обрабатывают системой активного контроля шума (2), посылая к целям сокращения шума акустический сигнал Рс, производимый по меньшей мере одним воздействующим устройством (5) и связанный через передаточную функцию Н с сигналом Y управления упомянутым по меньшей мере одним воздействующим устройством (5), производимым упомянутой системой активного контроля шума, причем упомянутое нарушение (DYS) работы имеет акустическую сигнатуру, идентифицируемую в первичном шуме Ро на уровне целей сокращения шума, отличающийся тем, что он включает в себя следующие этапы:
- получение упомянутого сигнала Y, производимого системой активного контроля;
- идентификация возможного появления нарушения (DYS) работы с помощью средства мониторинга, которое использует знание об Y и о передаточной функции Н, используемой системой активного контроля шума, и посылает, при необходимости, аварийное сообщение.
2. Способ акустического обнаружения по меньшей мере одного нарушения (DYS) работы двигателя по предыдущему пункту, в котором система активного контроля шума оценивает изменения передаточной функции Н во времени, которые являются предметом получения и используются на этапе идентификации.
3. Способ акустического обнаружения по меньшей мере одного нарушения (DYS) работы двигателя по п. 1, в котором сигнал Y образован совокупностью сигналов управления воздействующими устройствами системы активного контроля.
4. Способ акустического обнаружения по меньшей мере одного нарушения (DYS) работы двигателя по п. 1, согласно которому средство мониторинга восстанавливает представление акустического сигнала Рс с помощью матричной комбинации между сигналом Y и передаточной функцией Н и идентифицирует в нем возможное наличие акустической сигнатуры упомянутого нарушения (DYS) работы путем сравнения с шумом двигателя без нарушения работы.
5. Способ акустического обнаружения по меньшей мере одного нарушения работы двигателя по п. 1, в котором этап идентификации выполняют на ограниченной совокупности характеристических частот и который включает в себя промежуточный этап извлечения сигналов, поступающих с этапа получения, который подает сокращенные показатели к компонентам Y и Н для частот, характерных для идентификации шума нарушения (DYS) работы, на названных характеристических частотах.
6. Способ акустического обнаружения по меньшей мере одного нарушения работы двигателя по п. 1, в котором этап идентификации осуществляют дистанционно, за пределами установки, содержащей двигатель.
7. Устройство акустического обнаружения по меньшей мере одного нарушения (DYS) работы двигателя (1), причем двигатель создает первичный шум Ро, выполненное с возможностью его использования при наличии системы активного контроля шума (2), которая посылает к целям сокращения шума акустический сигнал Рс, производимый по меньшей мере одним воздействующим устройством (5) и связанный через передаточную функцию Н с сигналом Y управления упомянутым по меньшей мере одним воздействующим устройством (5), производимым упомянутой системой активного контроля шума, причем упомянутое нарушение (DYS) работы имеет акустическую сигнатуру, идентифицируемую в первичном шуме Ро на целях сокращения шума, отличающееся тем, что оно содержит:
- средство получения (6) сигнала Y, производимого системой активного контроля;
- средство мониторинга (10), выполненное с возможностью идентификации возможного появления нарушения (DYS) работы, исходя из сигнала Y и знания о передаточной функции Н, используемой системой активного контроля шума, и передачи, при необходимости, аварийного сообщения.
8. Устройство акустического обнаружения по меньшей мере одного нарушения (DYS) работы двигателя по предыдущему пункту, средство получения которого (6) выполнено с возможностью сбора от системы активного контроля шума изменений передаточной функции, которые оно оценивает во времени, и средство мониторинга которого (10) выполнено с возможностью использования упомянутых изменений передаточной функции.
9. Устройство акустического обнаружения нарушений работы двигателя по предыдущему пункту, для которого средство получения сигнала Y содержит индуктивные датчики (7) на управляющих кабелях воздействующих устройств, способные получать сигналы управления.
10. Устройство акустического обнаружения нарушений работы двигателя по п. 7, содержащее между средством получения (6) и средством мониторинга (10) средство извлечения (11) сокращенных показателей с компонентами Y и Н для частот, характерных для идентификации шума от нарушения (DYS) работы, на ограниченной совокупности характеристических частот.
11. Устройство акустического обнаружения нарушений работы двигателя по п. 7, в котором средство мониторинга (10) вынесено и содержит средства дистанционной передачи (12) между средствами, установленными на устройстве, и вынесенным средством мониторинга.
| FR 2973877 A1, 12.10.2012 | |||
| Фильтр | 1983 |
|
SU1205749A3 |
| FR 2972710 A1, 21.09.2012 | |||
| СПОСОБ АЭРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ПРОТОЧНОЙ ЧАСТИ АВИАЦИОННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
RU2028581C1 |
| ТРЕНАЖЕР ОПЕРАТОРА ЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА | 2002 |
|
RU2202830C1 |
| СПОСОБ УМЕНЬШЕНИЯ ШУМА ВЫХЛОПНОЙ СТРУИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2003 |
|
RU2253744C2 |

