Настоящее изобретение относится к способу и устройству для подавления шумов в пассажирском салоне транспортного средства, в частности, автомобиля, посредством активного управления. Оно находит свое применение в области промышленности, относящейся к оснащенным двигателем транспортным средствам, причем этот термин понимается в своем самом широком смысле, включающим в себя, в частности, легкие транспортные средства, тяжелые транспортные средства, дорожные транспортные средства, железнодорожные транспортные средства, катера, баржи, подводные лодки, и в области электроакустических устройств, таких как, например, автомобильные радиоприемники, в которые может быть добавлена такого рода функция.
Некоторые акустические шумы, имеющие место в пассажирском салоне транспортного средства, могут иметь широкий спектр, а другие могут, напротив, быть приблизительно моночастотными. Это, в частности, имеет место в случае шума, порождаемого вращением коленчатого вала, что известно как "гудящий шум", который выражается шумом, спектр которого состоит из линий, частоты которых пропорциональны частоте вращения коленчатого вала, с одной основной частотой и гармониками.
Эти частоты изменяются в соответствии со скоростью вращения коленчатого вала, но они, тем не менее, могут быть точно известны благодаря информации, поступающей от тахометра, обычно встроенного в транспортное средство.
Ранее уже предлагалось уменьшать, или даже подавлять, эти шумы посредством активных акустических средств. В связи с эти можно упомянуть описание современного уровня техники в области активного управления, применяемого в автомобильных транспортных средствах, приведенном Эллиотом (Elliot) в декабре 2008 г. в статье, имеющей название: "A review of active noise and vibration control in road vehicle" (ISVR technical memorandum n°981 - University of Southampton) ("Обзор активной защиты от шума и вибрации в дорожном транспортном средстве" (ISVR технический меморандум №981 - Университет Саутгемптона).
Существует две основные системы активного акустического управления. Во-первых, так называемая система с "прямой связью" или с упреждающей компенсацией. Такая система нуждается в громкоговорителе, микрофон определения погрешности, в котором желательно устранить шум, и регулятор, принимающий опорный сигнал, коррелированный с сигналом, подлежащим устранению, вырабатывающий сигнал коррекции, подаваемый в громкоговоритель. Такая система в схематичном виде показана на фиг.1, иллюстрирующей предшествующий уровень техники. Такая система, в частности, дала начало ряду алгоритмов, основанных на способе "Минимальной среднеквадратичной ошибки" (LMS-способ): Fx-LMS, FR-LMS, цель которых заключается в том, чтобы минимизировать, в смысле наименьших квадратов, сигнал, исходящий из микрофона определения погрешности, и осуществлять это посредством обработки опорного сигнала.
Кроме того, в случае так называемой системы с "прямой связью" можно сослаться на статью Sano et al. (Сано и др.), "NV counter-measure technology for a cylinder - On-Demand Engine-Development of active booming noise control applying adaptive notch filter" (SAE 2004), ("Технология мер противодействия шуму для цилиндра - выполняемая по требованию доводка двигателя с активным управлением для подавления гудящего шума, применяющей адаптивный узкополосный режекторный фильтр" (Общество инженеров-автомобилестроителей (США) 2004)). Авторы представляют алгоритм, основанный на адаптивном полосовом заградительном (режекторном) фильтре, с известной частотой ослабления шума. Устройство основано на алгоритме, структура которого относится к типу "с прямой связью", именуемом FR-SAN, который является адаптацией алгоритма FR-LMS, в случае, при котором шум, подлежащий ослаблению, относится к моночастотному типу. При реализации этого алгоритма не учитываются проблемы, возникающие при изменении передаточной функции пассажирского салона, например, в функции количества пассажиров. Кроме того, при таком алгоритме невозможно узнать, иначе, чем экспериментально, характеристику системы управления на частотах, отличных от частоты, на которой она работает.
Во-вторых, так называемая система с "обратной связью" или с противодействующей реакцией. Такая система в схематическом виде показана на фиг.2, иллюстрирующей предшествующий уровень техники. Такая система, в отличие от так называемой системы с "прямой связью", не нуждается в опорном сигнале. В таком случае она представляет собой традиционную систему с обратной связью, и могут быть использованы все инструменты традиционной техники автоматического регулирования (в частности, измерения робастности, анализа устойчивости, быстродействия). В частности может быть выполнен анализ робастности замкнутой системы по отношению к изменению передаточной функции пассажирского салона. Может также быть исследована частотная характеристика системы, не только на частоте подавления возмущения, но также и на других частотах.
Настоящее изобретение относится к этому второму типу так называемой системы с "обратной связью". Если описать это более конкретно, то оно относится к исполняемому в режиме реального времени активному способу для ослабления посредством обратной связи узкополосного шума, по существу моночастотного по меньшей мере на одной определенной частоте, в пассажирском салоне транспортного средства путем испускания звука по меньшей мере через один преобразователь, обычно громкоговоритель, управляемый сигналом u(t) или U(t) в зависимости, соответственно, от случая SISO (один вход - один выход) или MIMO (множество входов-множество выходов), генерируемым программируемым вычислительным устройством в зависимости от сигнала акустических измерений y(t) или Y(t) в соответствии с этим случаем, выполняемых посредством по меньшей мере одного акустического датчика, обычно микрофона, при этом использование одного датчика соответствует случаю SISO, один вход - один выход - одна переменная, а использование нескольких датчиков соответствует случаю MIMO, множество входов - множество выходов - переменных, и на первой стадии проектирования электроакустическая характеристика звена, образованного пассажирским салоном, преобразователем и датчиком, моделируется посредством электроакустической модели как электроакустическая передаточная функция, которую определяют и рассчитывают; после этого определяют и рассчитывают закон управления исходя из глобальной модели системы, в которой этот закон управления применяется к электроакустической передаточной функции, выход которой дополнительно принимает сигнал шума, подлежащий ослаблению, (р(t)), чтобы получить сигнал y(t) или Y(t) на упомянутой стадии проектирования, причем упомянутый закон управления позволяет вырабатывать сигнал u(t) или U(t) как функцию акустических измерений y(t) или Y(t), а на второй стадии использования рассчитанный закон управления используется в вычислительном устройстве для получения сигнала u(t) или U(t), посылаемого затем в преобразователь, в зависимости от сигнала y(t) или Y(t), принятого от датчика, для ослабления упомянутого шума.
В соответствии с изобретением реализуется закон управления, который содержит применение параметра Юлы (Youla) к центральному регулятору и который является таким, что в упомянутом законе управления только у параметра Юлы имеются коэффициенты, которые зависят от частоты шума, подлежащего ослаблению, центральный регулятор имеет постоянные коэффициенты, параметр Юлы имеет форму фильтра с бесконечной импульсной характеристикой, и, после определения и расчета закона управления в памяти вычислительного устройства сохраняются по меньшей мере упомянутые переменные коэффициенты, предпочтительно в таблице как функция определенной частоты (определенных частот) шума p(t), используемой на стадии проектирования, а на стадии использования, в режиме реального времени:
- узнают текущую частоту шума, подлежащего ослаблению,
- заставляют вычислительное устройство рассчитывать закон управления, содержащий центральный регулятор с параметром Юлы, использующий в качестве параметра Юлы сохраненные в памяти коэффициенты для определенной частоты, соответствующей текущей частоте шума, подлежащей ослаблению.
Другими словами, реализуется закон управления, который содержит часть с постоянными коэффициентами, именуемую центральным регулятором, и часть с коэффициентами, изменяющимися как функция частоты шума, подлежащего ослаблению, которая представляет собой здесь параметр Юлы, причем часть регулятора с переменными коэффициентами представляет собой фильтр с бесконечной импульсной характеристикой, и после определения и расчета закона управления по меньшей мере упомянутые переменные коэффициенты сохраняются в памяти вычислительного устройства, предпочтительно в таблице как функция определенной частоты (частот) шума p(t), используемой на стадии проектирования, а на стадии использования, в режиме реального времени: узнают текущую частоту шума, подлежащего ослаблению, и заставляют вычислительное устройство рассчитывать закон управления, содержащий центральный регулятор с постоянными коэффициентами с частью с переменными коэффициентами, использующий в качестве части с переменными коэффициентами сохраненные в памяти коэффициенты определенной частоты, соответствующей текущей частоте шума, подлежащего ослаблению. Следовательно, в рамках изобретения, для ослабления шума на по меньшей мере одной определенной частоте, реализован центральный регулятор с постоянными коэффициентами, к которому присоединяется блок с переменными коэффициентами, который является параметром Юлы в форме блока (Q) Юлы.
В рамках изобретения термин "сигнал" относится как к аналоговым сигналам, как, например, электрическому сигналу, выводимому непосредственно из микрофона, так и к цифровым сигналам, как, например, к выходному сигналу блока Юлы Q(q-1). Кроме того, следует понимать, что термины "преобразователь" и "датчик" используются в общем и функциональном значении, и что на практике, с этими терминами ассоциируются интерфейсные электронные схемы, такие как, в частности, аналого-цифровые или цифро-аналоговые преобразователи, фильтр(ы) защиты от наложения спектров, усилитель (усилители) (для громкоговорителя (громкоговорителей) и микрофона (микрофонов)). Термин "сигнал" также охватывает случаи: SISO, один вход - один выход, одна переменная (один датчик и, следовательно, один вход акустических измерений), и MIMO, множество входов - множество выходов - переменных (несколько датчиков и, следовательно, несколько входов акустических измерений), каким бы ни было количество громкоговорителей. Таким образом, изобретение может применяться как к случаю SISO, один вход - один выход, одна переменная (единственный микрофон, то есть, одно единственное место, в котором в пассажирском салоне будет ослаблен шум), так и к случаю MIMO, множество входов - множество выходов - переменных (несколько микрофонов, то есть, столько же мест, в которых будет ослаблен шум). Также следует понимать, что изобретение применяется к ослаблению как шума, который имеет место на некоторой конкретной частоте, по существу, постоянной во времени (например, шум холодильного компрессора в грузовике), так и шума, частота которого может изменяться с течением времени, и в этом случае, на стадии проектирования предпочтительно определять и рассчитывать параметры Юлы, блок Q(q-1), для нескольких определенных частот таким образом, чтобы во время стадии использования брать результат расчета параметра Юлы для той определенной частоты, которая соответствует (равна или близка, то есть, фактически, наилучшим образом соответствует или иначе интерполирована по отношению к) текущей частоте шума, подлежащего ослаблению. Следует понимать, что чем более мелким будет шаг сетки частот, тем выше будет шанс получить результат расчета параметра Юлы с определенной частотой, которая соответствует частоте текущего шума, подлежащего ослаблению. На самом деле, будет показано, что в законе управления только параметр Юлы (на практике, его коэффициенты) является переменным, как функция частоты шума, в отличие от коэффициентов центрального регулятора, которые остаются постоянными и независимыми от частоты шума.
Можно отметить, что параметризация Юлы (Youla) уже использовалась в целях подавления синусоидального возмущения в совершенно другой области техники: при управлении вибрациями активной подвески. Соответствующей статьей является: "Adaptive narrow disturbance applied to an active suspension - an internal model approach" (Automatica 2005) "Адаптивное узкополосное возмущение, применяемое к активной подвеске - подход внутренней модели" (Автоматика 2005 г.), авторами которой являются I.D.Landau et al. (И.Д.Ландау и др.). В этом последнем устройстве параметр Юлы имеет форму фильтра с конечной импульсной характеристикой (передаточной функции с единственным полиномом без знаменателя), тогда как в настоящем изобретении будет показано, что этот параметр Юлы имеет форму фильтра с бесконечной импульсной характеристикой (передаточной функции с числителем и знаменателем). Кроме того, в этой статье, расчет коэффициентов параметра Юлы выполняется посредством адаптивного устройства, то есть информация о частоте возмущения не известна, в отличие от настоящего изобретения, в котором эта частота известна на основе измерений, в частности, посредством счетчика числа оборотов, и в котором коэффициенты параметров Юлы хранятся в таблицах, подлежащих использованию в режиме реального времени. Устройство и способ, соответствующие изобретению, обеспечивают закон управления с гораздо более высокой робастностью. В конкретном случае изобретения это соответствует нечувствительности закона управления к изменениям параметров электроакустической модели, то есть к изменениям конфигурации пассажирского салона, что, с точки зрения промышленного изготовления является фундаментальным элементом.
Также может быть упомянута статья "Adaptive control for interior noise control in rocket fairings" ("Адаптивное управление для внутренней защиты от шума в ракетных обтекателях"), Mark A.Mcever, 44-ая конференция AIAA/ASME/ASCE/AHS (Американского института аэронавтики и астронавтики / Американского общества инженеров-механиков / Американского общества инженеров гражданского строительства) Structures, structural dynamics and (Конструкции, динамика конструкций и конструкционные материалы), 7-10 апреля 2003 г. Здесь снова параметр Юлы представляет собой фильтр с конечной импульсной характеристикой (КИХ-фильтр), который создает проблемы, в том что касается робастности системы, алгоритм является адаптивным и не является специально предназначенным для подавления некоторой конкретной частоты.
Наконец, в области управления вибрациями в автомобильном транспортном средстве может также быть упомянута статья: "Active control of engine - induced vibrations in automotive vehicles using disturbance observer gain scheduling" ("Активное управление порождаемыми двигателем вибрациями в автомобильных транспортных средствах с использованием оперативного управления коэффициентом усиления "наблюдателя" возмущения"), в Control engineering practice 12 (сборник "Практические вопросы техники автоматического регулирования") (2004 г.) 1029-1039, Bohn et al (Бон и другие), Представленный в этой статье закон управления использует "наблюдателя" состояния, несколько элементов которого изменяются как функция частоты, подлежащей подавлению, что ведет к тому факту, что закон управления имеет гораздо большее количество изменяющихся параметров чем их оптимальное количество. С другой стороны, настоящее изобретение гарантирует, что количество изменяющихся параметров закона управления является минимальным.
В различных вариантах реализации изобретения используются (либо по-отдельности, либо в любой технически возможной комбинации) нижеследующие средства:
- реализуется стадия проектирования на программируемом вычислительном устройстве,
- определяется и рассчитывается параметр Юлы путем дискретизации непрерывной передаточной функции второго порядка,
- на втором этапе на стадии проектирования определяют и рассчитывают полиномы Ro(q-1) и So(q-1) центрального регулятора таким образом, чтобы упомянутый центральный регулятор сам обеспечивал запас регулирования коэффициента усиления и фазы, не имея при этом цели подавления возмущения,
- В случае SISO, один вход - один выход, одна переменная, на стадии проектирования:
a) - на первом этапе используют линейную электроакустическую модель, причем электроакустическая модель имеет форму дискретной рациональной электроакустической передаточной функции, и упомянутая электроакустическая модель определяется и рассчитывается путем акустического возбуждения пассажирского салона посредством преобразователя и акустических измерений, выполняемых датчиком, с применением затем процесса идентификации линейной системы, выполняемого с этими измерениями и моделью,
b) - на втором этапе реализуют центральный регулятор, который применяется к определенной таким образом и рассчитанной электроакустической модели, причем центральный регулятор имеет форму RS-регулятора, состоящего из двух блоков 

c) - на третьем этапе к центральному регулятору присоединяют параметр Юлы, который, таким образом, представляет собой передаточный блок с переменными коэффициентами, формируя закон управления, причем параметр Юлы имеет форму блока Q(q-1), фильтра с бесконечной импульсной характеристикой, с 
- узнают текущую частоту шума, подлежащего ослаблению,
- заставляют вычислительное устройство рассчитывать закон управления, содержащий RS-регулятор с параметром Юлы, используя в качестве параметра Юлы коэффициенты, которые были рассчитаны для частоты шума, соответствующей текущей частоте шума, подлежащего ослаблению, причем коэффициенты Ro(q-1) и So(q-1) являются постоянными коэффициентами,
- на стадии проектирования в случае SISO, один вход - один выход, одна переменная, выполняются нижеследующие операции:
a) - на первом этапе пассажирский салон подвергают акустическому возбуждению, подавая на преобразователь сигнал возбуждения, спектральная плотность которого является, по существу, равномерной на эффективной полосе частот,
b) - на втором этапе определяют и рассчитывают полиномы Ro(q-1) и So(q-1) центрального регулятора таким образом, чтобы упомянутый центральный регулятор был эквивалентен регулятору, рассчитанному посредством размещения полюсов замкнутого контура при применении центрального регулятора к электроакустической передаточной функции, причем n полюсов замкнутого контура помещаются на n полюсов передаточной функции электроакустической системы,
c) - на третьем этапе для по меньшей мере одной частоты (p(t)) шума, включая по меньшей мере эту определенную частоту шума, подлежащего ослаблению, определяют и рассчитывают числитель и знаменатель блока (Q(q-1)) Юлы в законе управления, как функцию критерия ослабления, причем блок Q(q-1) выражается в форме отношения 

а на стадии использования, в режиме реального времени, выполняются нижеследующие операции:
- вычислительное устройство заставляют рассчитывать закон управления, центральный регулятор с постоянными коэффициентами и параметр Юлы с переменными коэффициентами, таким образом, чтобы вырабатывать сигнал u(t), посылаемый преобразователю, как функцию акустических измерений y(t), и используя для блока (Q(q-1)) Юлы значения коэффициентов полиномов α(q-1) и β(q-1), определенные и рассчитанные для определенной частоты, соответствующей текущей частоте,
- расчет оценки шума получается путем применения числителя электроакустической передаточной функции к u(t) и вычитания результата из результата применения y(t) к знаменателю электроакустической передаточной функции,
- для электроакустической модели используется электроакустическая передаточная функция, имеющая форму:
где d представляет собой количество составляющих задержку периодов дискретизации в системе, В и А представляют собой полиномы q-1, имеющие форму:
B(q-1)=b0+b1·q-1+…bnb·q-nb
A(q-1)=1+a 1·q-1+…a na·q-na
где bi и a i представляют собой скалярные величины, и q-1 представляет собой оператор задержки периода дискретизации, а расчет оценки шума получают путем применения функции q-dB(q-1) к u(t) и вычитания результата из результата применения y(t) к функции A(q-1),
- для этапа (b) полиномы Ro(q-1) и So(q-1) центрального регулятора определяются и рассчитываются посредством способа размещения полюсов, при этом n доминирующих полюсов замкнутого контура, снабженного центральным регулятором, выбираются равными n полюсам электроакустической передаточной функции, и m вспомогательных полюсов являются полюсами, расположенными на высокой частоте
- на стадии проектирования:
а) - на первом этапе используют линейную электроакустическую модель, при этом электроакустическая модель имеет форму представления состояния, состоящую из матричных блоков: Н, W, G и q-1, I, причем G представляет собой матрицу перехода, Н представляет собой входную матрицу, W представляет собой выходную матрицу, и I представляет собой единичную матрицу, при этом упомянутое представление состояния может быть выражено рекуррентным уравнением:
X(t+Te)=G·X(t)+H·U(t)
Y(t)=W·X(t)
где X(t): вектор состояния, U(t): вектор входных сигналов; Y(t): вектор выходных сигналов,
и упомянутая электроакустическая модель определяется и рассчитывается путем акустического возбуждения пассажирского салона посредством преобразователей и акустических измерений, выполняемых датчиками, с применением затем процесса идентификации линейной системы, выполняемого с этими измерениями и моделью,
b) - на втором этапе реализуют центральный регулятор, применяемый к определенной таким образом и рассчитанной модели, причем центральный регулятор имеет форму "наблюдателя" состояния и обратной связи по оцененному состоянию, которая итеративно выражает 

где управляющее воздействие 
и упомянутый центральный регулятор определяют и рассчитывают,
c) - на третьем этапе к центральному регулятору присоединяют параметр (Юлы), который, таким образом, представляет собой передаточный блок с переменными коэффициентами, формируя закон управления, причем параметр Юлы, имеет форму блока (Q) для MIMO, множество входов - множество выходов - переменных, состоящего из матриц (AQ), (BQ), (CQ) состояний, присоединенного к центральному регулятору, также выражающемуся в форме представления состояния, блок (Q), у которого выходной сигнал, сложенный с выходным сигналом центрального регулятора, дает сигнал, который образует сигнал, противоположный U(t), и у которого на входе принимается сигнал Y(t), из которого вычтен сигнал 

и, на стадии использования, в режиме реального времени:
- узнают текущую частоту шума, подлежащего ослаблению,
- заставляют вычислительное устройство рассчитывать закон управления, содержащий центральный регулятор с постоянными коэффициентами и параметр Юлы с переменными коэффициентами, используя в качестве параметра Юлы коэффициенты, которые были рассчитаны для частоты шума, соответствующей текущей частоте шума, подлежащего ослаблению,
- на стадии проектирования в случае MIMO, множество входов - множество выходов - переменных, выполняются нижеследующие операции:
a) - на первом этапе пассажирский салон подвергают акустическому возбуждению, подавая на преобразователи сигналы возбуждения, спектральная плотность которых является, по существу, равномерной на эффективной полосе частот, причем сигналы возбуждения являются декоррелированными по отношению друг к другу,
b) - на втором этапе определяют и рассчитывают центральный регулятор таким образом, чтобы он был эквивалентен регулятору с "наблюдателем" состояния и обратной связью по рассчитанному состоянию, посредством размещения полюсов при применении центрального регулятора к электроакустической передаточной функции, причем, с этой целью, выбирается нулевой коэффициент усиления "наблюдателя", то есть Kf=0 (коэффициент усиления "наблюдателя" выбирается равным нулевой матрице), и коэффициент (Kc) усиления обратной связи по состоянию выбирается таким образом, чтобы ввести в этот контур высокочастотные полюса для того, чтобы обеспечить робастность закона управления, снабженного параметром Юлы, причем расчет Kc выполняется, например, посредством линейно-квадратичной оптимизации (LQ-оптимизации).
c) - на третьем этапе при рассмотрении представления увеличенного "наблюдателя" состояния определяют и рассчитывают полюсы блока (Q) Юлы в законе управления, для по меньшей мере одной частоты (P(t)) шума, включая по меньшей мере эту определенную частоту шума, подлежащего ослаблению, как функцию критерия ослабления, таким образом, чтобы получить значения коэффициентов параметра Юлы для этой/каждой частоты,
а на стадии использования, в режиме реального времени, выполняются нижеследующие операции:
- заставляют вычислительное устройство рассчитывать закон управления, центральный регулятор с постоянными коэффициентами и параметр Юлы с переменными коэффициентами, вырабатывая сигнал U(t), посылаемый на преобразователи, как функцию акустических измерений Y(t), и используя для параметра Юлы значения коэффициентов, определенные и рассчитанные для определенной частоты, соответствующей текущей частоте,
- на втором этапе расчет Kc выполняется посредством линейно-квадратичной оптимизации (LQ-оптимизации)
- способ приспособлен для множества определенных частот шума, подлежащего ослаблению, и этап (с) повторяется для каждой из этих определенных частот, и, на стадии использования, в случае, когда ни одна из этих определенных частот не соответствует текущей частоте шума, подлежащего ослаблению, производится интерполяция на упомянутой текущей частоте для значений коэффициентов блока (Q) Юлы, основывающаяся на значениях коэффициентов упомянутого блока (Q) Юлы, которые известны для этих определенных частот,
- дискретизация сигналов производится с частотой Fe, и на этапе (а) эффективная полоса частот, используемых для сигнала возбуждения, по существу, равна [0, Fe/2],
- сигнал возбуждения имеет равномерную спектральную плотность,
- перед стадией применения, на стадии проектирования, добавляется четвертый и этап (d), предназначенный для проверки устойчивости и робастности модели электроакустической системы и закона управления, центрального регулятора с параметром Юлы, ранее полученного на этапах (с (а) по (с)), путем выполнения моделирования применения закона управления, полученного на этапах (b) и (с), к электроакустической модели, полученной на этапе (а), для этой определенной частоты (этих определенных частот), и в случае, когда некоторый предварительно заданный критерий устойчивости и/или робастности не удовлетворяется, производится повторение по меньшей мере этапа (с) при изменении критерия ослабления,
- на четвертом этапе (d) на стадии проектирования, в случае, когда заданный критерий устойчивости и/или робастности не удовлетворяется, дополнительно производится повторение этапа (b) при изменении вспомогательных полюсов замкнутого контура,
- стадия проектирования представляет собой предварительную стадию и она выполняется один раз, предварительно по отношению к стадии использования, с сохранением в памяти результатов определения и расчета для использования на стадии использования (например, в случае монопеременной для SISO-системы (системы с единственным входом и единственным выходом), в памяти сохраняются коэффициенты блоков R, S и Q для рассчитанного закона управления, так же как и рассчитанная электроакустическая передаточная функции для блока (Q) таблиц коэффициентов, которые могут быть реализованы вследствие расчетов для нескольких определенных частот),
- критерий ослабления выбирается как функция по меньшей мере одного из двух нижеследующих элементов: глубины ослабления (амплитуды) и ширины полосы ослабления,
- текущая частота шума, подлежащего ослаблению, узнается из измерения, производимого счетчиком оборотов двигателя транспортного средства.
Если описать это в более общем виде, то изобретение также относится к устройству, специально приспособленного к осуществлению способа по изобретению для того, чтобы ослаблять узкополосный шум, по существу, моночастотный на по меньшей мере одной определенной частоте, при этом устройство содержит по меньшей мере один преобразователь, обычно громкоговоритель, управляемый сигналом, генерируемым программируемым вычислительным устройством как функция сигнала акустических измерений, выполняемых по меньшей мере одним акустическим датчиком, обычно микрофоном, при этом закон управления определен и рассчитан на первой стадии -проектировании, упомянутый рассчитанный закон управления используется на второй стадии - использовании, в вычислительном устройстве, для выработки сигнала, посылаемого преобразователю, как функции сигнала, принимаемого от датчика, для ослабления упомянутого шума, и при этом устройство по изобретению содержит средства для реализации, в вычислительном устройстве, закона управления, содержащего применение параметра Юлы к центральному регулятору, при этом в упомянутом законе управления только параметр Юлы имеет коэффициенты, которые зависят от частоты шума, подлежащего ослаблению, центральный регулятор имеет постоянные коэффициенты, а память вычислительного устройства хранит по меньшей мере упомянутые переменные коэффициенты, предпочтительно, в таблице как функцию определенной частоты (определенных частот) р(t) шума используемой (используемых) на стадии проектирования.
Изобретение также относится к носителю с командами для прямого или непрямого управления вычислительным устройством таким образом, чтобы оно функционировало в соответствии со способом по изобретению, и, в частности, в режиме реального времени на стадии использования.
Настоящее изобретение будет теперь более подробно описано, но без наложения тем самым на него ограничения, посредством нижеследующего описания со ссылкой на прилагаемые чертежи, на которых:
фиг.1, соответствующая предшествующему уровню техники, является схематическим представлением так называемой системы с "прямой связью" или с упреждающей компенсацией для системы ослабления шума;
фиг.2, соответствующая предшествующему уровню техники, является схематическим представлением так называемой системы с "обратной связью" или с противодействующей реакцией в системе ослабления шума;
фиг.3, соответствующая предшествующему уровню техники, является схематическим представлением принципиальной схемы электроакустической замкнутой системы с законом управления для пассажирского салона автомобиля;
фиг.4 является схематическим представлением в момент времени возбуждения реальной акустической системы пассажирского салона автомобиля, которое предназначено для того, чтобы определить и вычислить электроакустическую модель, которая будет использоваться;
фиг.5 является представлением замкнутой системы, соответствующей электроакустической модели с регулятором RST-типа, именуемого как центральный регулятор, при Т=0 и в случае SISO, один вход - один выход, одна переменная;
фиг.6 представляет собой пример прямой функции чувствительности и показывает, что благодаря применению теоремы Боде-Фрейденберга-Луза (Bode-Freudenberg-Looze), площади двух областей, располагающихся выше и ниже оси 0 дБ, равны друг другу;
фиг.7 является представлением случая закона управления в случае SISO, один вход - один выход, одна переменная, применяемого к электроакустической модели и содержащего центральный регулятора RS-типа, к которому присоединен параметр Юлы;
фиг.8 является представлением полной схемы закона управления с центральным регулятором RS-типа, к которому присоединен параметр Юлы, и рассчитываемого в реальном масштабе времени на стадии использования, для ослабления шума в пассажирском салоне;
фиг.9 является представлением схемы передачи в системе, состоящей из 2 громкоговорителей и двух микрофонов, и, следовательно, в случае MIMO, множество входов - множество выходов - переменных;
фиг.10 является представлением структурной схемы системы, подлежащей регулированию, то есть, электроакустической модели пассажирского салона в случае MIMO, множество входов - множество выходов - переменных;
фиг.11 является представлением структурной схемы центрального регулятора, в случае MIMO, множество входов - множество выходов - переменных;
фиг.12 является представлением структурной схемы центрального регулятора, примененного к электроакустической модели пассажирского салона, в случае MIMO, множество входов - множество выходов - переменных;
фиг.13 является представлением структурной схемы закона управления, центрального регулятора + параметра Юлы, примененного к электроакустической модели пассажирского салона, в случае MIMO, множество входов - множество выходов - переменных;
фиг.14 является представлением структурной схемы закона управления, центрального регулятора + параметра Юлы, используемого в режиме реального времени для ослабления шума, в случае MIMO, множество входов - множество выходов - переменных.
Теперь более подробно опишем правила, лежащие в основе функционирования устройства активной защиты от шума в пассажирском салоне, соответствующего изобретению, причем это устройство, управляемое программируемым вычислительным устройством, состоит из микрофона и одного или нескольких громкоговорителей, связанных друг с другом и интегрированных в транспортное средство. Громкоговорители управляются законом управления, который вырабатывает управляющие сигналы, основанные на сигнале, полученном от микрофона. Соответственно, опишем в подробностях этот закон управления, так же как и методологию для настройки этого закона управления. Для упрощения объяснения в первой части будет рассмотрен более простой случай SISO, один вход - один выход, одна переменная (один единственный микрофон), а во второй части - случай MIMO, множество входов - множество выходов - переменных (несколько микрофонов).
Принципиальная схема с законом управления и организацией электроакустического замкнутого контура в транспортном средстве показана в общем виде на фиг.3.
Для начала отметим, что устройство по изобретению (и способ, который в нем реализован) содержит средства для подавления моночастотного возмущения (шума), частота которого предполагается известной, приемники для внешней информации, как, например, для данных о скорости вращения двигателя транспортного средства, предоставляемых тахометром…
Для того, чтобы синтезировать закон управления, необходима модель реальной системы, составленной из электроакустических и акустических элементов пассажирского салона, включающих в себя громкоговоритель (громкоговорители) (преобразователи), микрофон(ы) (датчик), связанный с ними электронный элемент (связанные с ними электронные элементы) (усилители, преобразователи…). Такая модель, именуемая как "электроакустическая модель", должна иметь форму рациональной передаточной функции, то есть она должна вести себя как дискретный, фильтр с бесконечной импульсной характеристикой.
Следует отметить, что поскольку вычислительное устройство является цифровым, то реализованы аналого-цифровые и цифро-аналоговые преобразователи, в частности, для осуществления дискретизации аналоговых сигналов. Таким образом, вычислительное устройство обрабатывает дискретизированные сигналы с периодом Те (в секундах) и частотой Fe=1/Те (в Герцах).
Принимая во внимание уровень вовлеченных сигналов, в предпочтительном варианте может быть выполнена линейная аппроксимация реальной системы, составленной из электроакустических и акустических элементов пассажирского салона. В усовершенствованных альтернативных вариантах реализации изобретения также могут использоваться средства, предназначенные для того, чтобы избежать нелинейных явлений насыщения или тому подобного, (например, сжатие/расширение сигналов, частотные фильтры защиты от наложения спектров…).
Следует также принимать во внимание то, что уравнения, управляющие реальным откликом пассажирского салона, являются уравнениями в частных производных, то есть передаточная функция, представляющая в точности реальную систему, имеет конечную размерность (модель с распределенными параметрами). Таким образом, для реализации изобретения необходимо найти компромисс для определения электроакустической модели, и порядок передаточной функции упомянутой модели выбирается с размерностью, которая уменьшена в достаточной мере для того, чтобы не привести к слишком большому объему вычислений, но достаточно большая для того, чтобы правильно аппроксимировать эту модель. Такое ограничение приводит в результате к тому, что можно избежать избыточной дискретизации. В порядке примера: для максимальной частоты возмущающего шума, составляющей 120 Гц, может быть выбрана частота дискретизации, составляющая 500 Гц. Одно из преимуществ выбора умеренной частоты дискретизации заключается в том, что она уменьшает вычислительную нагрузку на находящееся внутри автомобиля вычислительное устройство. Следует отметить, что, поскольку усилитель громкоговорителя имеет гораздо более высокую частоту дискретизации (или даже работает с аналоговыми компонентами), то желательно разместить между выходом вычислительного устройства и входом громкоговорителя фильтр нижних частот, функционирующий на частоте усилителя громкоговорителя, причем частота отсечения упомянутого фильтра является постоянным, для того, чтобы уменьшить нелинейные искажения, вызванные переходом между сигналами различных периодов дискретизации.
В рамках настоящего изобретения была выбрана некоторая конкретная форма электроакустической модели, которая будет теперь описана. Однако, следует понимать, что в рамках настоящего изобретения могут быть использованы и другие формы электроакустической модели, и, в частности, в случае, при котором определение и расчет системы ослабления, примененные к этой электроакустической модели, не дали бы удовлетворительного решения (смотри место в данном описании после реализации дополнительного времени проверки устойчивости и робастности модели электроакустической системы и системы RS-регулятора, с параметром Юлы, во время стадии проектирования).
Передаточная функция электроакустической модели, которая описывает отклик реальной электроакустической системы, может быть выражена, между точками u(t) и y(t) системы, в отсутствии какого-либо замкнутого контура. Пусть q-1 будет оператором задержки периода дискретизации, тогда требуемая передаточная функция, в отсутствии какого-либо замкнутого контура и шума (шум, подлежащий ослаблению, отсутствует), имеет следующую форму:
где d представляет собой количество составляющих задержку периодов дискретизации в системе,
В и А представляют собой полиномы q-1, при этом q-1 представляет собой оператор задержки периода дискретизации. В частности:
B(q-1)=b0+b1·q-1+…bnb·q-nb
A(q-1)=1+a 1·q-1+…a na·q-na
где bi и a i представляют собой скалярные величины.
Идентификация производится путем возбуждения реальной системы посредством сигнала u(t), спектральная плотность которого является, по существу, равномерной в частотном диапазоне [0, Fe/2], где Fe/2 представляет собой частоту Найквиста. Следует понимать, что частота (частоты) шума, подлежащие ослаблению, также должна содержаться в этом самом интервале, и Fe, таким образом, выбирается как функция самой высокой частоты шума, подлежащего ослаблению. Такого рода стимуляционный сигнал возбуждения может быть создан, например, псевдослучайной двоичной последовательностью (PRBS-последовательностью). Такое возбуждение, схематично показанное На фиг.4, выполняется в отсутствии возмущающего внешнего шума. Все тестовые данные u(t) и y(t), получаемые в течение времени тестирования реальной системы (пассажирского салона с его электроакустическими компонентами), записываются таким образом, чтобы быть обработанными в привилегированных условиях пакетной обработки.
Алгоритмы, которые могут быть использованы для идентификации линейных систем, являются многочисленными. Для краткого обзора методологий, которые могут использоваться, можно сослаться, например, на работу I.D. Landau: "Commande des systemes" (И.Д. Ландау "Управление системами") (2002 г.). После получения рациональной передаточной функции должна быть проверена идентификация для того, чтобы гарантировать, что полученная электроакустическая модель является правильной. Существуют различные способы проверки, соответствующие выдвинутым гипотезам о возмущающем шуме, воздействующем на модель (например, проверка показания погрешности прогноза). Для повышения надежности полученной модели имеется дополнительная возможность проверки полученной модели посредством сравнения между результатами моделирования на полученной модели и реальной системой, подвергнутой моночастотным возбуждениям (сравнения амплитуды и фазы сигналов) в частотном диапазоне, соответствующем рассматриваемому диапазону для подавления возмущения.
Предпочтительно, чтобы такая операция идентификации с возбуждением выполнялась для всех конфигураций заполнения пассажирского салона реальной модели. Такое заполнение может соответствовать положениям, занимаемым пассажирами, приспособлениями (например, дополнительными сиденьями), изменению акустического или электронного материала, или любого другого условия, ответственного за электроакустическую характеристику пассажирского салона. Следовательно, желательно выполнить идентификацию для всех конфигураций заполнения пассажирского салона, потому что множественные полученные модели, на самом деле, имеют расхождения по коэффициенту усиления и фазе для каждой частоты.
Теперь, после получения передаточной функции электроакустической модели и после проверки ее посредством указанных соответствующих инструментов, будет синтезирован закон управления для подавления возмущения переменной частоты.
Характеристика уровня подавления акустического возмущения, которое действуют на пассажирский салон, дается посредством прямой функции чувствительности замкнутой системы, каковая функция именуется как Syp.
Предположим, что закон управления относится к RST-типу, то есть, закону, составленному из трех блоков, при этом Т=0, a R, S представляют собой такие полиномы, что:
R(q-1)=r0+r1·q-1+…rnr·q-nr
S(q-1)=1+s1·q-1+…sns·q-ns
Закон управления записывается нижеследующим образом:
RST-регулятор представляет собой более общую форму внедрения регулятора для SISO, один вход - один выход, одна переменная. Замкнутая система может в таком случае быть схематизирована в виде структурной схемы, показанной на фиг.5, в которой 
Прямая функция (Syp) чувствительности может быть определена как передаточная функция между сигналом (p(t)) возмущения и сигналом (y(t)) микрофона. Эта передаточная функция описывает отклик замкнутого контура по отношению к подавлению акустического возмущения.
В частности получение этой функции дает возможность узнавать для любой частоты качество подавления возмущения.
Можно показать, что эта функция записывается нижеследующим образом:

Поскольку цель закона управления заключается в том, чтобы сделать возможным подавление возмущения на частоте fpert, то модуль Syp должен быть низким на упомянутой частоте, на практике гораздо ниже чем 0 дБ.
В идеальном случае было бы желательно, чтобы Syp был наиболее низким из возможных на всех частотах. Однако, эта цель недостижима вследствие теоремы Боде-Фрейденберга-Луза (Bode-Freudenberg-Looze), которая показывает что, если система асимптотически устойчива в замкнутом контуре и также устойчива в разомкнутом контуре, то:

Это означает, что сумма площадей между кривой модуля чувствительности и осью 0 дБ, взятых с их соответствующим знаком, составляет ноль. Это подразумевает, что ослабление возмущения в определенной частотной области с необходимостью приводит к усилению возмущения в других частотных областях.
Пример прямой функции чувствительности показан на фиг.6, и эти две площади областей, располагающихся выше и ниже оси 0 дБ, равны друг другу.
Выше было показано, что знаменатель Syp записывается в виде: A(q-1)S(q-1)+q-dB(q-1)R(q-1), который представляет собой полином q-1. Корни этого полинома образуют полюса замкнутого контура.
Расчет коэффициентов полиномов R(q-1) и S(q-1) может, в частности, быть выполнено способом размещения полюсов. Для синтеза линейного регулятора существуют и другие способы расчета, но предпочтительно, чтобы здесь использовался способ размещения полюсов. Он состоит в расчете коэффициентов R и S посредством указания полюсов замкнутого контура, которые являются корнями полинома P, то есть:

После этого, как выбраны эти полюса, выражается P и решается уравнение (2), которое представляет собой уравнение Безу (Bezout). Подробности того, каким образом решается уравнение Безу (Bezout), могут быть найдены, например, в вышеупомянутой работе I.D.Landau (И.Д. Ландау) на страницах 151 и 152. Это осуществляется посредством решения системы Сильвестра (Sylvester). Кроме того, с этой работой связаны вычислительные процедуры, соответствующие программам программного обеспечения Matlab® и Scilab®, предназначенным для решения этого уравнения. Выбор полюсов может быть выполнен в соответствии с различными стратегиями. Одна из этих стратегий будет объяснена в дальнейшем.
Устранение влияния возмущений p(t) на выходе получается на частотах, на которых:

Следовательно, для расчета регулятора, подавляющего возмущение на частоте fpert, часть S определяется априори путем принятия в уравнении (2) того, что S разлагается на множители с выделением Hs-полинома второго порядка, для моночастотного возмущения, то есть:

h1=-2cos(2π.fpert/Fe)
если h2=1, то вводится пара комплексных нулей, без затухания на частоте fpert.
Если h2≠1, то в S может быть введена пара комплексных нолей, при ненулевом затухании, при этом затухание выбирается как функция требуемого ослабления на определенной частоте.
В таком случае уравнение Безу (Bezout), подлежащее решению, представляет собой:

На практике частота шума, подлежащего подавлению, изменяется во времени как функция, в частности, скорости вращения коленчатого вала транспортного средства, блок Hs должен также изменяться как функция упомянутой частоты. В таком случае это имеет своим результатом то, что для каждой частоты, подлежащей подавлению, должно быть решено уравнение Безу (Bezout), имеющее следующий вид:

Можно заметить, что решение этого уравнения, в частности, в режиме реального времени, привело бы к большому объему вычислений. Кроме того, при изменении частоты все коэффициенты S и R регулятора должны быть изменены. Это приводит в результате к очень тяжелому алгоритму, требующему значительной вычислительной мощности. Таким образом, даже в том случае, если может быть применено это простое решение с RS-регулятором, предпочтительно реализовать другое решение, которое лишено этой проблемы и которое минимизирует количество коэффициентов закона управления, изменяющихся с частотой возмущения, подлежащего подавлению.
Поэтому, для решения этой проблемы, далее предлагается решение, основанное на применении концепции параметризации Юлы-Кучеры (Youla-Kucera) к регулятору RS-типа.
Такого система SISO, один вход - один выход, одна переменная, регулируемая регулятором RS-типа, к которому присоединен параметр Юлы, в схематическом виде показана на фиг.7.
Такого рода регулятор основан на так называемом "центральном" RS-регуляторе, составленного из блоков Ro(q-1) и So(q-1), в которых Ro и So представляют собой полиномы q-1.
Параметр Юлы представляет собой блок 
Как было показано выше, блоки q-dB(q-1) и A(q-1) представляют собой числитель и знаменатель передаточной функции электроакустической системы, подлежащей регулированию.
Можно показать, что звено-регулятор, сделанное таким образом и показанное на фиг.7, эквивалентно регулятору RS-типа, у которого блоки R и S равны:

Теперь, предположим, что центральный регулятор сформирован и что он стабилизирует систему.
Без параметризации Юлы, характеристический полином (Po) системы, как показано выше, записывается следующим образом:

При предоставлении центральному регулятору параметра Юлы характеристический полином системы записывается следующим образом:
P(q-1)=A(q-1).(So(q-1).α(q-1)-q-dB(q-1).β(q-1)+q-dB(q-1).(Ro(q-1).α(q-1)+A(q-1).β(q-1))
P(q-1)=Po(q-1).α(q-1)
можно видеть, что полюсы Q (нули α) соседствуют с полюсами замкнутого контура, оснащенного только центральным регулятором, характеристическим полиномом которого является Po.
Кроме того, уравнение:

может быть использовано для того, чтобы определить блок S через предварительно определенным блок Hs, то есть:
S'(q-1).Hs(q-1)=So(q-1).α(q-1)-q-dB(q-1)β(q-1)
то есть:

которое также является уравнением Безу (Bezout), что дает возможность, в частности, найти β, если определены α и Hs.
Пусть Sypo будет прямой функцией чувствительности замкнутой системы с центральным регулятором, без параметра Юлы.
Прямая функция чувствительности замкнутой системы с регулятором, снабженным параметром Юлы записывается следующим образом:

Следовательно, основываясь на замкнутой системе, содержащей центральный регулятор, не имеющий предназначения подавлять синусоидальное возмущение, в частности, на частоте fpert, к центральному регулятору может быть присоединен параметр Юлы, что изменит функцию (Syp) чувствительности, сохраняя при этом полюса замкнутого контура, снабженного центральным регулятором, к которым добавятся полюсы Q. В таком случае в Syp на частоте fpert может быть создан провал в спектре.
Для этой цели Hs и α рассчитываются таким образом, чтобы передаточная функция 
Hs и α представляют собой полиномы q-1 второй степени, а ς1, ς2 представляют собой коэффициенты затухания передаточной функции второго порядка.
Кроме того, операция дискретизации непрерывной передаточной функции (в c) может быть выполнена посредством вычислительных процедур, которые могут быть найдены, например, в программах вычислительного программного обеспечения, специально предназначенных для техники автоматического регулирования и управления. В случае Matlab® это - функция "c2d".
Можно показать, что ослабление М на частоте fpert задается как:

Кроме того, необходимо, чтобы ς1<1.
Кроме того, для равного отношения 
После этого, решая уравнение Безу (Bezout) (10), можно вычислить β.
Показано, что этот выбор Hs и α создает провал в спектре функции (Syp) чувствительности, оказывая при этом почти пренебрежимо малое влияние по отношению к Sypo на других частотах, даже в том случае, если применима теорема Боде-Фрейденберга-Луза (Bode-Freudenberg-Looze), что вызывает повышение модуля Syp по отношению к Sypo на частотах, отличных от fpert.
Такое повышение Syp может снизить робастность замкнутого контура, которая может быть измерена запасом по модулю (расстоянием до точки -1 от положения частоты разомкнутой системы, скорректированной в плоскости Найквиста) равным обратному значению максимума [Syp| в частотном диапазоне [0; Fe/2].
Главное преимущество использования параметризации Юлы состоит в том факте, что а имеет порядок 2:

Кроме того, β имеет порядок 1:

Следовательно, в случае предложенной системы, состоящей из регулятора RS-типа, к которому присоединен параметр Юлы, количество параметров, изменяющееся как функция частоты возмущающего шума, подлежащего подавлению, в законе управления составляет только 4. Расчет этих параметров как функции частоты (f) возмущения, подлежащего подавлению, может быть выполнен заранее, автономно, посредством решения уравнения Безу (Bezout) (10), во время стадии проектирования закона управления, причем эти параметры могут быть сохранены в таблицах в находящемся внутри автомобиля программируемом вычислительном устройстве и вызываться, в режиме реального времени, как функция частоты, подлежащей подавлению.
На фиг.8 показана полная схема закона управления (центральный RS-регулятор + параметр (Q) Юлы).
Для выполнения синтеза регулятора, предпочтительно использовать электроакустическую модель, которая может быть квалифицирована как срединная, то есть модель, соответствующая промежуточному уровню заполнения пассажирского салона, из числа электроакустических моделей, соответствующих различным конфигурациям заполнения пассажирского салона.
Предпочтительно, чтобы цель при синтезе центрального регулятора заключалась в том, чтобы обеспечить максимальные запасы, не имея специальной цели подавления возмущения. Это может быть достигнуто, например, посредством метода размещения полюсов, и, в случае необходимости, можно обратиться к вышеупомянутой работе I.D.Landau (И.Д.Ландау), в частности, ко всей Главе 3. Более точно, это может быть осуществлено так, как объясняется далее.
Решено выполнять размещение полюсов замкнутого контура посредством размещения n доминирующих полюсов замкнутого контура на n полюсах системы, подлежащей регулированию, то есть, корнях A(q-1), при этом n представляет собой степень полинома А. Предварительного определения блока So нет, по той причине что нет цели подавить возмущение посредством одного лишь центрального регулятора. При выполнении этой операции центральный регулятор вовсе не подавляет возмущения p(t), но обеспечивает максимальную робастность.
Также может быть размещено некоторое количество дополнительных "высокочастотных" полюсов, значение которых находится между 0,05 и 0,5 на комплексной плоскости (в случае, при котором нет избыточной дискретизации). Следует принять во внимание то, что дискретизированная система является устойчивой, если все ее полюсы содержатся строго в единичной окружности на комплексной плоскости. Эти вспомогательные полюсы играют ту роль, чтобы повышать робастность закона управления при присоединении параметра Юлы.
После того, как полюсы замкнутого контура, то есть, корни Po(q-1) были выбраны, выражается Po(q-1), которое представляет собой полином q-1 в степени n+m. После этого, с использованием вышеупомянутых процедур решается уравнение Безу (Bezout):

где So и S'o являются неизвестными.
Центральный регулятор, следовательно, определен и рассчитан.
Затем рассчитываются коэффициенты параметра (Q) Юлы (то есть, α и β), которые являются единственными полиномами закона управления, изменяющимися как функция частоты возмущения, подлежащего подавлению.
Для каждой из частот (fpert) возмущения, подлежащего подавлению, коэффициенты (ς1, ς2) затухания уравнения (12) выбираются таким образом, чтобы отрегулировать глубину ослабления Syp на упомянутой частоте, так же как и ширину провала в спектре (ширину полосы частот) на частоте fpert в Syp, сохраняя при этом достаточную робастность, которая может быть измерена вышеописанным запасом по модулю (максимум Syp). В качестве цели может быть задан, например, запас по модулю, составляющий 0,7, который соответствует высокому уровню робастности замкнутого контура, робастности, которая обеспечит устойчивость активной системы управления при вариациях конфигурации пассажирского салона.
Известно, что регулирование в замкнутом контуре является тем более робастным, чем ближе полюсы замкнутого контура к системе, подлежащей регулированию. Такое условие полностью удовлетворяется при этом выборе размещения полюса во время синтеза центрального регулятора.
Полиномы Hs(q-1) и α(q-1) рассчитываются, как объяснено выше, посредством дискретизации передаточной функции второго порядка, и уравнение Безу (Bezout) (10) решается таким образом, чтобы определить β(q-1).
Предпочтительно, чтобы этот расчет, обеспечивающий определение α(q-1) и β(q-1) как функций fpert, выполнялся по всему частотному диапазону, в котором требуется осуществить подавление возмущения, α и β могут, например, рассчитываться для частот, изменяющихся с приращением на 2 Гц, в диапазоне, находящемся между 30 и 120 Гц.
В дополнение к полученным электроакустической модели (электроакустическим моделям) и модели центрального RS-регулятора, все коэффициенты полиномов α(q-1) и β(q-1) как функции fpert сохраняются в памяти, таблице для этих коэффициентов, в вычислительном устройстве. Таблицы позволяют находить данные, подлежащие использованию в режиме реального времени, как функцию текущих условий, в частности текущей частоты шума, подлежащего ослаблению, и, возможно, текущей конфигурации заполнения пассажирского салона.
Следовательно, закон управления (RS-регулятор + параметр Юлы) в таком случае синтезирован. На дополнительном этапе стадии проектирования можно проверить, что он имеет устойчивость и надлежащий уровень робастности (запас по модулю >0,5), посредством моделирования замкнутой системы и подавления возмущения на всем частотном диапазоне, для всех конфигураций заполнения пассажирского купе, с использованием электроакустических моделей, идентифицированные в различных конфигурациях. Если это не имеет место, то спроектированный закона управления изменяют, воздействуя на коэффициенты ς1, ς2 (глубину и ширину полосы частот подавления). Если этого все-таки не достаточно, то можно попробовать взять в качестве электроакустической модели другую модель из числа моделей полученных для различных конфигураций пассажирского салона, или также воздействовать на размещение дополнительных полюсов замкнутого контура (высокочастотных полюсов).
На этих предварительных этапах проектирования и синтеза требуются значительные вычисления, так что предпочтительно, чтобы они были выполнены в пакетном режиме. Как только синтез выполнен, полученные модели могут быть применены в режиме реального времени на вычислительном устройстве для достижения ослабления шума в пассажирском салоне.
При функционировании вычислительного устройства в режиме реального времени, как показано на фиг.8, хранящиеся в памяти данные, в частности коэффициенты полиномов α(q-1) и β(q-1) для параметра Юлы, вызывается как функция информации о текущей частоте шума, подлежащего ослаблению, поступающей, например, косвенным образом от измерения тахометра на коленчатом вале. Для значений текущей частоты, которые не соответствуют непосредственно частотам входных данных таблицы (текущая частота располагается между двумя частотами расчета значений таблицы), может быть произведена оценка коэффициентов полиномов α(q-1) и β(q-1) посредством выполнения интерполяции между рассчитанными коэффициентами для двух или больше известных значений частоты. В последнем случае, предпочтительно, чтобы шаг сетки частот между частотами, используемыми для расчетов коэффициентов, не был слишком большим, обычно подходящей является сетка частот с шагом 2 Гц.
Суммируя вышеприведенный пример можно видеть, что изобретение относится к исполняемому в режиме реального времени активному способу для ослабления, посредством обратной связи, узкополосного шума, по существу, моночастотного, на по меньшей мере одной определенной частоте в пассажирском салоне транспортного средства, путем испускания звука через по меньшей мере один преобразователь, обычно громкоговоритель, управляемый сигналом u(t), генерируемым программируемым вычислительным устройством как функция сигнала (y(t)) акустического измерения, выполняемого по меньшей мере одним акустическим датчиком, обычно микрофоном, при этом на первой стадии - проектировании электроакустическая характеристика звена, образованного пассажирским салоном, преобразователем и датчиком, моделируется посредством электроакустической модели как электроакустическая передаточная функция, которая определяется и рассчитывается, после этого определяется и рассчитывается закон управления, исходя из глобальной модели системы, в которой этот закон управления применяется к электроакустической передаточной функции, у которой выход дополнительно принимает сигнал (p(t)) шума, дающий сигнал y(t) на упомянутой стадии проектирования, причем упомянутый закон управления, дает возможность вырабатывать сигнал u(t) как функцию акустических измерений y(t), а на второй стадии - использовании, упомянутый рассчитанный закон управления используется в вычислительном устройстве для того, чтобы вырабатывать сигнал u(t), посылаемый затем преобразователю, как функцию сигнала y(t), принятого от датчика, для ослабления упомянутого шума.
Если описать это более конкретно, то на стадии проектирования:
a) - на первом этапе в качестве электроакустической модели используется дискретная рациональная электроакустическая передаточная функция, и упомянутая электроакустическая модель определяется и рассчитывается путем акустического возбуждения пассажирского салона посредством преобразователей и акустических измерений, выполняемых датчиком, с применением затем процесса идентификации линейной системы с использованием этих измерений и модели передаточной функции,
b) - на втором этапе реализуется закон управления, который содержит так называемый "центральный" RS-регулятор, состоящий из двух блоков 

c) - на третьем этапе в закон управления вводится параметр Юлы в форме блока Q(q-1), присоединенного к центральному RS-регулятору, причем упомянутый блок (Q(q-1)) Юлы, принимает оценку шума, полученную путем расчета из сигналов u(t) и y(t) и как функция электроакустической передаточной функции, и выходной сигнал упомянутого блока (Q(q-1)) Юлы вычитается из инвертированного сигнала Ro(q-1) посланного на вход блока
а на стадии использования, в режиме реального времени:
- определяют текущую частоту шума, подлежащего ослаблению,
- заставляют вычислительное устройство рассчитывать закон управления, содержащий RS-регулятор с параметром Юлы, используя в качестве этого параметра параметр, который был рассчитан для определенной частоты, соответствующей текущей частоте шума, подлежащего ослаблению.
До настоящего времени была представлена простая реализация, при которой пассажирский салон, снабженный единственным микрофоном и одним громкоговорителем или группой громкоговорителей, все из которых возбуждаются одним и тем же сигналом.
Но фактом является то, что уменьшение шума/тишина, которые могут быть получены посредством активного процесса управления, являются очень локализованными в пространстве. В вышеупомянутой статье "A review of active noise and vibration control in road vehicles" ("Обзор активной защиты от шума и вибрации в дорожных транспортных средствах", Eliott (Элиотт) указывает, что зона тишины вокруг микрофона, определяющего рассогласование, не превышает одну десятую длины волны шума, подлежащего подавлению, то есть, приблизительно 110 см для шума частотой 30 Гц, 55 см для шума частотой 60 Гц, 28 см для шума частотой 120 Гц, при температуре окружающей среды.
Таким образом, можно видеть, что невозможно получить равномерное уменьшение шума при наличии единственного микрофоном в пассажирском салоне довольно просторного автомобиля, и что необходимо умножить количество микрофонов, определяющих рассогласование, и распределить их в пассажирском салоне таким образом, чтобы увеличить пространство, в котором имеется уменьшение шума.
В нижеследующем описании, в целях обобщения объяснений, будет рассмотрен случай, при котором пассажирский салон оборудован несколькими микрофонами и несколькими громкоговорителями (или группой громкоговорителей). Такое обобщение позволяет понять более частные варианты применения с конкретными количествами громкоговорителей и микрофонов.
Первое решение состоит в использовании схемы управления, предварительно заданной для единственного микрофона, для образования замкнутых контуров "громкоговоритель-микрофон" по типу "один с одним". Однако, такое решение могло бы дать очень плохие результаты, или даже неустойчивость. Действительно, некоторый данный громкоговоритель смоделированной системы будет оказывать влияние на все микрофоны пассажирского салона, даже те, которые не включены в состав его собственной смоделированной системы.
Соответственно, предлагается другое более глобальное решение, рассматриваемое с точки зрения техники автоматического регулирования. При этом, в случае нескольких микрофонов, мы сталкиваемся с задачей для MIMO, множество входов - множество выходов - переменных, то есть, с несколькими входами и несколькими выходами, сопряженными друг с другом.
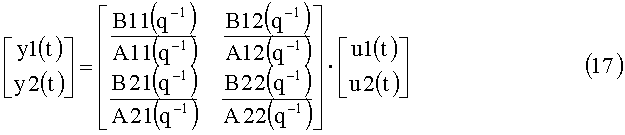
В порядке примера, на фиг.9 показана схема электроакустической передачи в системе 2*2 (2 громкоговорителя, 2 микрофона). В этом примере, микрофон 1 чувствителен к акустическим воздействиям громкоговорителя 1 (НР1) и громкоговорителя 2 (НР2). Кроме того, микрофон 2 чувствителен к акустическим воздействиям громкоговорителя 2 (НР2) и громкоговорителя 1 (НР1). Такая система, приводимая в порядке примера, может быть смоделирована нижеследующей матрицей передаточных функций:

или еще в случае (2*2):
Представление MIMO-системы, множество входов - множество выходов - переменных, посредством передаточной функции, на самом деле, не очень удобно, и предпочтительным является представление состояния, которое является универсальным представлением линейных систем (являются ли они MIMO, множество входов - множество выходов - переменных, или нет).
Пусть:
nu будет количеством входов системы (то есть количеством громкоговорителей или групп громкоговорителей, соединенных друг с другом);
ny будет количеством выходов системы (то есть количеством микрофонов);
n будет порядком системы.
В нижеследующем описании для упрощения объяснения полагается, что nu=ny, но это не является ограничением, и нижеследующее описание может также применяться к случаю nu>ny.
Представление состояния электроакустической системы (пассажирского салона) может быть записано как рекуррентное уравнение, именуемое "уравнением состояния":

где:
X: вектор состояния системы, имеющий размерность (n*1)
U: вектор входных сигналов системы, имеющий размерность (nu*1)
Y: вектор выходных сигналов, имеющий размерность (ny*1)
и:
G: матрица именуемая "матрицей эволюции", имеющая размерность (n*n)
Н: входная матрица системы, имеющая размерность (n*nu)
W: выходная матрица системы, имеющая размерность (ny*n).
Коэффициенты матриц G, Н, W определяют линейную систему MIMO, множество входов - множество выходов - переменных.
Примем, что X(t) соответствует вектору Х в момент (t) времени, а X(t+Te) соответствует вектору Х в момент (t+Te) времени (то есть, через период дискретизации после X(t)).
Закон управления основан на этом представлении состояния, и следовательно, в случае SISO, один вход - один выход, одна переменная, должна быть определена модель электроакустической системы, подлежащей регулированию, (электроакустическая модель пассажирского салона), то есть коэффициенты матриц G, Н, W.
На фиг 10 показана структурная схема электроакустической модели пассажирского салона в случае MIMO, множество входов - множество выходов - переменных, на которой I соответствует единичной матрице, и которая соответствует формуле (18). По аналогии со случаем SISO, один вход - один выход, одна переменная, P(t) представляет собой вектор возмущений на выходах, то есть:
выраженный в p1…pny, где pi представляет собой возмущение на выходе i.
Что касается случая SISO, один вход - один выход, одна переменная, коэффициенты модели электроакустической системы, подлежащей регулированию, получаются посредством процедуры идентификации во время стадии проектирования, то есть, посредством возбуждения реальной электроакустической системы шумами, имеющими, по существу, равномерную спектральную плотность, при этом nu громкоговорителей возбуждаются посредством сигналов, которые декоррелированы по отношению друг к другу.
После этого входные данные (измерения с микрофонов) и выходные данные (сигналы для громкоговорителей) сохраняются в памяти в вычислительном устройстве и обрабатываются в нем таким образом, чтобы получить представление состояние упомянутой системы, используя на этот раз алгоритмы идентификации, которые специально предназначены для систем MIMO, множество входов - множество выходов - переменных. Эти алгоритмы, например, представлены в инструментарии программ программного обеспечения, специализированного в области техники автоматического регулирования, такого как, например, Matlab®. Полезно также обращение к работе L.LJUNG, "System identification Theory for the user" (Л.Льюнг "Теория идентификации систем для пользователей"). Prentice Hall, Englewood Cliffs, N.S, 1987 г., алгоритмы представленные в этой работе дают начало инструментарию, специализированному на идентификации, в программе программного обеспечения Matlab®. To же самое и для алгоритмов проверки правильности модели, полученной для электроакустической системы, подлежащей регулированию.
Другой возможный вариант реализации состоит в выполнении идентификации nu*ny передаточных функций, одной за другой, посредством инструментов идентификации для случая SISO, один вход - один выход, одна переменная, и посредством возбуждения громкоговорителей одного за другим, а после этого объединения nu*ny моделей в единую модель для MIMO, множество входов - множество выходов - переменных. Такое объединение может быть выполнено, например, посредством инновационного метода минимальной среднеквадратичной ошибки, алгоритм которого описывается в работе Ph. de Larminat: "Automatic apphquée", Hermès, 2007 г.
Как в случае SISO, один вход - один выход, одна переменная, желательно выполнить идентификацию для каждой из конфигураций пассажирского салона и взять в качестве модели электроакустической системы, которую сохраняют для следующей части стадии проектирования, модель которая может быть квалифицирована как "срединная".
Как только модель ввода - вывода электроакустической системы была получена в виде представления состояния, и эта модель была проверена, после этого может быть определен и рассчитан закон управления. Теперь, таким образом, должен быть синтезирован закон управления, который позволяет подавлять на каждом из микрофонов акустическое возмущение с частотой fpert, при этом упомянутая частота fpert может изменяться с течением времени.
С этой целью концепция центрального регулятора и концепция параметра Юлы, используемые в случае SISO, один вход - один выход, одна переменная, обобщаются для случая MIMO, множество входов - множество выходов - переменных.
Полагается, что электроакустическая система описана представлением (18) состояния. Можно показать, что центральный регулятор в случае MIMO, множество входов - множество выходов - переменных, имеет форму: "наблюдатель состояния + обратная связь по оцененному состоянию", в виде:

где:

Kf представляет собой усиление "наблюдателя" размерностью (n*ny).
Таким образом:

и закон управления записывается следующим образом:

где Kc представляет собой вектор обратной связи по оцененному состоянию системы, имеющий размерность (nu*n).
Может быть полезным обратиться к работе "Robustesse и commande optimale" (Alazard и др., издательство CEPADUES, 1999 г., страницы 224 и 225).
В соответствии с этими формулами на фиг.11 показана структурная схема центрального регулятора, а на фиг.12 показана структурная схема центрального регулятора, примененного к электроакустической модели пассажирского салона, по-прежнему в случае системы MIMO, множество входов - множество выходов - переменных. Эта последняя структура представляет собой традиционную структуру в технике автоматического регулирования. В соответствии с правилом, известным как "принцип разделения", полюсы замкнутого контура образованы собственными значениями G-Kf.W и собственными значениями G-H.Kc, то есть:
eig(G-Kf.W)∪eig(G-Н.Kc).
eig(G-Kf.W) представляет собой назначенные полюса фильтрации, а
eig(G-H.Kc) представляют собой полюса управления.
при этом eig() обозначает собственные значения.
Поэтому, размещение полюсов замкнутого контура, снабженного центральным регулятором, может быть выполнено путем выбора коэффициентов Kf и Kc, которые являются параметрами настройки этой структуры управления. Количество полюсов, подлежащих размещению, составляет 2*n.
Таким образом, этот наблюдатель оцениваемого набора и обратная связь по состоянию выбираются в качестве центрального регулятора. В случае SISO, один вход - один выход, одна переменная, было показано, что, если n полюсов замкнутого контура размещены на n полюсах электроакустической системы (то есть, на корнях полиномов A(q-1), то получается центральный регулятор, который не подавляет специально возмущения, но имеет максимальную робастность.
В случае MIMO, множество входов - множество выходов - переменных, цель также состоит в том, чтобы центральный регулятор имел максимальную робастность, не имея при этом особой цели подавления возмущения. Следовательно, полюсы фильтрования выбираются равными полюсам системы, подлежащей регулированию. Таким образом, требуется, чтобы Kf.W=0.
Наиболее тривиальным решением является:

Таким образом, уравнение центрального регулятора принимает вид:

Остается разместить другие n полюсов (полюсы (eig(G-Н.Kc)) регулирования). Следуя тому, что было сделано для регулятора в случае SISO, один вход - один выход, одна переменная, эти полюсы будут выбраны как набор высокочастотных полюсов, предназначенных для обеспечения робастности закона управления. Следует отметить, что поскольку имеет место ситуация MIMO, множество входов - множество выходов -переменных, то количество коэффициентов Kc (nu*n) больше чем количество полюсов (n), которые остается разместить, и таким образом, эти степени свободы могут быть с успехом использованы для того, чтобы выполнить размещение системы собственных векторов (выбор не только собственных значений, но также и собственных векторов (G-H·Kc)).
Другой способ для того, чтобы преступить к расчету Кс состоит в выполнении линейно-квадратичной оптимизации (LQ-оптимизации), в отношении которой имеется весьма обширная литература. Можно, например, упомянуть работу "Robustesse и commande optimale", издательство CEPADUES, 1999 г., страницы 69-79. Также, имеется возможность для расчета коэффициентов матрицы (Кс) выполнить то, что Ph. de Larminat называет LQ-оптимизацией В-типа, то есть, оптимизацию основанную на горизонте Tc. Подробности этой LQ-оптимизации В-типа может быть найдена в работе Ph. de Larminat: "Automatic appliquee", Hermes, 2007 г. В частности, с этой работой связана вычислительная процедура для программы программного обеспечения Matlab®, предназначенная для расчета коэффициентов Kc, соответствующих LQ-оптимизации В-типа.
Центральный регулятор, таким образом, определен и рассчитан, теперь будет описан способ определения и расчета параметра Юлы, который связан с этим центральным регулятором для задания закона управления в случае MIMO, множество входов - множество выходов - переменных. Цель по-прежнему заключается в том, чтобы подавлять синусоидальное возмущение известной частоты fpert, в данном случае - на уровне каждого микрофона, заставляя при изменении fpert изменяться только коэффициенты параметра Юлы.
Можно показать, что параметр Юлы связан с центральным регулятором, формируя закон управления так, как это показано на фиг.13. Объяснение схемы, показанной на Фиг.13, может быть найдено, например, в работе "Robustesse и commande optimale", издательство CEPADUES, 1999 г., страницы 224-225.
В законе управления, как это символически показано на фиг.13, параметр (Q) Юлы сам представляет собой блок MIMO, множество входов - множество выходов - переменных, у которого представление состояния может быть записано нижеследующим образом:

где XQ представляет собой вектор состояния параметра Юлы.
В таком случае закон управления центрального регулятора, снабженного параметром Юлы записывается в следующем виде:

причем этот закон управления соответствует обратной связи по состоянию наблюдателя, связанной с обратной связью по состоянию параметра Юлы.
Теперь будет описан способ определения параметров блока (Q) таким образом, чтобы обеспечить подавление возмущений известной частоты.
В случае SISO, один вход - один выход, одна переменная, передаточная функция 
В случае MIMO, множество входов - множество выходов - переменных, к каждому выходу i применяется модель нерегулируемого возмущения:
Для каждого выхода i эта модель нерегулируемого возмущения записывается следующим образом:

где:

Z2i представляет собой аддитивное возмущение выхода i (размерностью 1*1), при этом:

и

Следует отметить, что выбор формы G2i; W2i не является единственно возможным. Здесь было принято каноническое представление возможности наблюдения.
hS1i и hS2i вычитаются из числителя передаточной функции 
при этом:
Hsi(q-1)=h0i+h1i·q-1+h2i·q-2
Дискретизация непрерывной передаточной функции может быть выполнена, например, посредством вычислительной процедуры "c2d" программы программного обеспечения Matlab®.
В таком случае уравнение состояния наблюдателя, увеличенное за счет моделей возмущения на выходах, может быть записано следующим образом:


при этом:

где:
Kf1 имеет размерность (2*ny, ny)
Kc1 имеет размерность (nu, 2*ny)
и при этом:


Этот вектор, представляющий собой вектор состояния нерегулируемой модели.

Уравнение (29) наблюдателя может также быть записано следующим образом:


Теперь следует выбрать коэффициенты Kf2, так чтобы разместить полюса этой части увеличенного наблюдателя.
Выбор для полюсов 2ny корней знаменателей αi(q-1), что делается в случае SISO, один вход - один выход, одна переменная, обобщается до случая MIMO, множество входов - множество выходов - переменных.
Если описать это более точно, то eig(G2i-Kf2i.W2i) выбирается равным корням вышеупомянутых полиномов αi(q-1), каковые полиномы являются, как это описано выше, результатом дискретизации непрерывной передаточной функции второго порядка.
Расчет Kf2i как функции G2i, W2i и αi(q-1) является традиционной операцией размещения полюсов. Для исполнения этой операции можно, например, использовать процедуру из Matlab®, специально предназначенную для этой операции, наименованием которой является "PLACE" ("МЕСТО").
При этом последнем условии матрица Kf2i является диагональной поблочно, то есть:
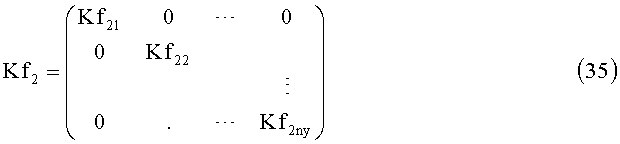
Остается выбрать Kc2 размерностью (nu*2ny). Этот выбор не является свободным в случае, если требуется получить асимптотическое подавление выходных возмущений.
Kc2, должен удовлетворять так называемым уравнениям "асимптотического подавления", которые имеют следующий вид:

где:
Ta·G2-G·Ta-H·Ga=0

Объяснение уравнений (36) и (37) может быть найдено в работе в работе Ph. de Larminat: "Automatic appliquée", Hermès, 2007 г., страницы 202 - 205. Решение уравнений (37) в результате приводит к решению системы Сильвестра. Следует отметить, что с вышеупомянутой работой предоставляется вычислительная процедура для программы программного обеспечения Matlab® для решения уравнений асимптотического подавления.
Сравнивая уравнения (24) и (25) с уравнением (34) можно заметить, что эта структура с увеличенным состоянием наблюдателя не что иное, как центральный регулятор, в том, виде, в котором он был определен, снабженный параметром Юлы, но где обозначения из уравнений (24) и (25):
AQ=G2-Kf2·W2
BQ=Kf2

Следует отметить, что эти уравнения справедливы, потому что было принято Kf=0.
Следовательно, для каждой частоты возмущения коэффициенты AQ, BQ, CQ могут быть рассчитаны во время настройки закона управления и храниться в таблицах, так чтобы вызываться на стадии использования, как функция fpert, на вычислительном устройстве, работающем в режиме реального времени. На фиг.14 показана схема применения закона управления на стадии использования, в режиме реального времени, в программируемом вычислительном устройстве.
Блок (Q) Юлы может быть реализован как переходная матрица таким образом, чтобы минимизировать количество переменных коэффициентов в этом блоке. Такая операция может быть выполнена, например, посредством процедуры "ss2tf" в Matlab®.
Как было показано выше, настройка параметров закона управления заключается в выборе полюсов управления (осуществляемом посредством параметров Kc), которые оказывают влияние на робастность закона управления. Для каждой частоты можно выбрать коэффициенты затухания ς1i, ς2i непрерывных передаточных функций второго порядка, которые оказывают влияние на ширины полосы частот и глубину подавления возмущения на частоте fpert.
Следует отметить, что робастность управления замкнутой системой может быть оценена путем расчета бесконечной нормы переходной матрицы между P(t) и Y(t) (обобщение случая SISO, один вход - один выход, одна переменная). Поскольку расчет бесконечной нормы переходной матрицы выполняется путем расчета сингулярных чисел упомянутой переходной матрицы, то здесь снова имеется возможность использовать программу программного обеспечения Matlab® и, в частности, функцию "SIGMA" ("СИГМА") из "инструментария управления".
Эти возможности настройки являются обобщением возможностей настройки случая SISO, один вход - один выход, одна переменная.
Резюмируя вышесказанное отметим, что закон управления (центральный регулятор + параметр Юлы), предназначенный для применения к электроакустической модели пассажирского салона транспортного средства, в случае MIMO, множество входов -множество выходов - переменных, получается посредством следующих этапов:
- получение электроакустической модели пассажира транспортного средства, которая представляет собой линейные системы MIMO, множество входов - множество выходов - переменных, в форме представления состояния, рассчитываемого посредством идентификации,
- синтез центрального регулятора в форме наблюдателя состояния и обратной связи по оцененному состоянию, при этом Kf выбирается как Kf=0,
- выбор коэффициентов Kc, которые соответствуют высокочастотным полюсам, для обеспечения робастности закона управления (возможно посредством LQ-оптимизации) и, в частности LQ-оптимизации В-типа),
- выбор коэффициента затухания ς1i, ς2i для сетки частот возмущения, подлежащих подавлению, такая сетка осуществляется, в частности, в случае, при котором с течением времени могут встретиться несколько текущих частот шума, подлежащего ослаблению, или в случае, когда частота шума изменяется с течением времени (как и для случая SISO, один вход - один выход, одна переменная, на стадии использования может быть выполнена интерполяция переменных параметров как функции частоты),
- расчет коэффициентов параметра Юлы, которые сохраняются в таблицах вычислительного устройства, подлежащих использованию в режиме реального времени на стадии использования.
Следует отметить, что уменьшение количества коэффициентов, помещаемых в таблицы, может быть выполнено путем выбора всех ?з; равными друг другу для данной частоты возмущения.
Следовательно, в изобретении реализован центральный регулятор с параметром Юлы, который имеет форму фильтра с бесконечной импульсной характеристикой, с по меньшей мере одним входом и по меньшей мере одним выходом, количество которых является функцией выбранных форм реализации (SISO, один вход - один выход, одна переменная, MIMO, множество входов - множество выходов - переменных, количество датчиков и преобразователей…).
В вышеупомянутых приводимых в качестве примера вариантах реализации изобретения в целях упрощения объяснений был рассмотрен случай подавления одной единственной частоты. Однако, изобретение может применяться к подавлению нескольких частот в одно и то же время, и такой случай будет, соответственно, описан теперь.
И действительно, независимо от того, имеет ли место случай SISO, один вход -один выход, одна переменная или случай MIMO, множество входов - множество выходов - переменных, имеется возможность подавлять одновременно больше чем одну частоту. Это приводит к введению второго или даже третьего провала в спектре функции (Syp) чувствительности. Однако, принимая во внимание теорему теоремы Боде-Фрейденберга-Луза (Bode-Freudenberg-Looze), из этого следует то, что создание одного или нескольких дополнительных провалов в спектре функции чувствительности обязательно вызывает повышение |Syp| на других частотах, а следовательно снижение робастности.
В нижеследующем описании предполагается, что осуществляется подавление двух частот, но это ни в коем случае не является ограничением и дается только в порядке примера. Эти две частоты представляют собой:
- текущую частоту, которая обозначается здесь как fpert, если использовать обозначения, использовавшиеся до сих пор в данном документе, и
- вторую частоту, связанную с fpert, и которая будет обозначена как η.fpert, причем η не обязательно представляет собой целое число, t] может представлять собой константу, не являясь обязательно целым числом, но оно может также представлять собой функцию fpert, при этом единственное условие заключается в том, что функция η.(fpert) должна быть непрерывной.
В случае SISO, один вход - один выход, одна переменная, по-прежнему применимо уравнение (10) Безу (Bezout):
S'(q-1).Hs(q-1)+q-dB(q-1)β(q-1)=So(q-1).α(q-1)
в котором неизвестными по-прежнему являются S'(q-1) и β(q-1) но на этот раз Hs и α таковы, что передаточная функция 
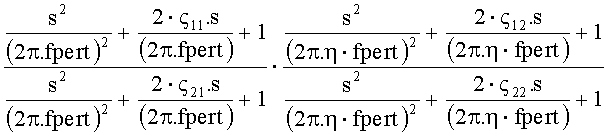
Здесь Hs и α представляют собой полиномы q-1 4-ой степени, а ς11, ς12, ς21, ς22 представляют собой коэффициенты затухания, позволяющие, как и в случае моночастотного подавления, задавать ширину и глубину провала ослабления на представляющей кривой модуля Syp, α(q-1) представляет собой полином 4-го порядка, а β(q-1) представляет собой полином 3-го порядка. Таким образом, количество переменных коэффициентов в законе управления является более высоким: имеется 4 дополнительных коэффициента, варьируемые как функция fpert.
В случае MIMO, множество входов - множество выходов - переменных, матрица G2i уравнения (27) имеет теперь размерность 4*4, то есть:
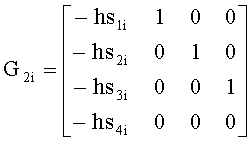
и, также

Следует отметить, что выбор формы G2i W2i не является единственно возможным. Здесь было принято каноническое представление наблюдаемости.
при этом hS1i hS2i, hS3i hS4i представляют собой коэффициенты числителя передаточной функции 
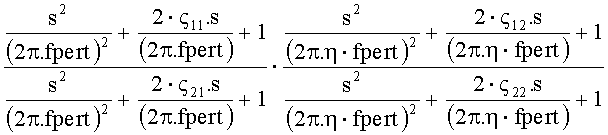
где:
Hsi(q-1)=h0i+h1i·q-1+h2i(q-1)+h3i(q-1)+h4i(q-1)
и:
Из этого следует, что теперь:
Kf2 имеет размерность (4*ny, ny)
Kc2 имеет размерность (nu, 4*ny),
при этом G2 дано в соответствии с уравнением (31), но имеет размерность (4ny*4ny).
Вектор 
То, что было описано для количества одновременно подавляемых частот, равного двум, возможно может быть распространено на более высокое количество частот. Однако, как было объяснено выше, увеличение количества подавляемых частот приводит к потере робастности, быстро становясь неприемлемым.
Следует понимать, что принцип изобретения: центральный регулятор, к которому присоединен параметр Юлы, может быть применен на практике для ослабления шума по-иному, нежели то, что было подробно описано выше. В частности, иным может быть тип электроакустической модели, способы определения и/или синтеза центрального регулятора и параметра Юлы также могут быть иными, и для практической реализации 43 этих других способов может быть полезно обратиться к указанной литературе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМПФИРОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ КОЛЕБАНИЙ В СИСТЕМАХ ЭНЕРГОСНАБЖЕНИЯ | 2008 |
|
RU2461944C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ | 2012 |
|
RU2585377C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ | 2012 |
|
RU2552891C1 |
| СИСТЕМА УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ ПАРАМЕТРОМ | 2016 |
|
RU2713261C2 |
| ПЕРЕСТРАИВАЕМЫЙ ФИЛЬТР | 2016 |
|
RU2738030C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПО ПИД-ЗАКОНУ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510956C2 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| УСТРОЙСТВО СВЯЗИ И СПОСОБ СВЯЗИ | 2019 |
|
RU2784371C2 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
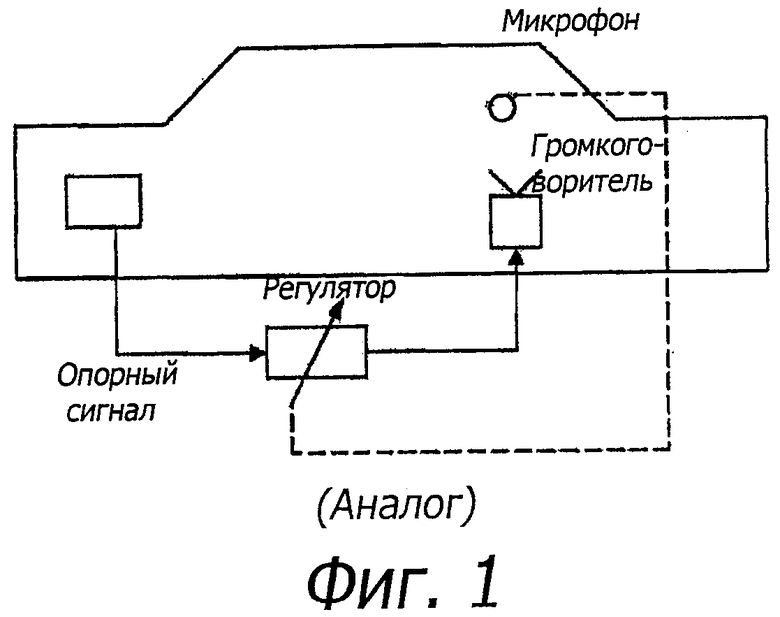
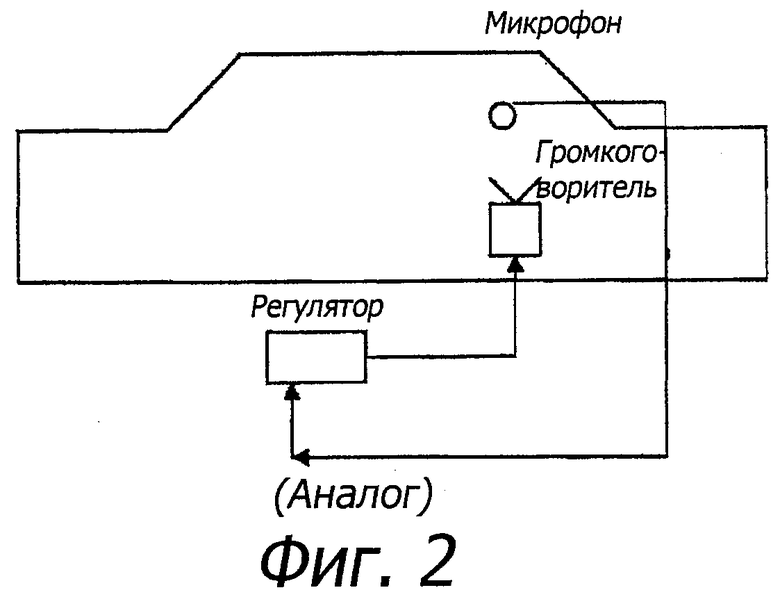

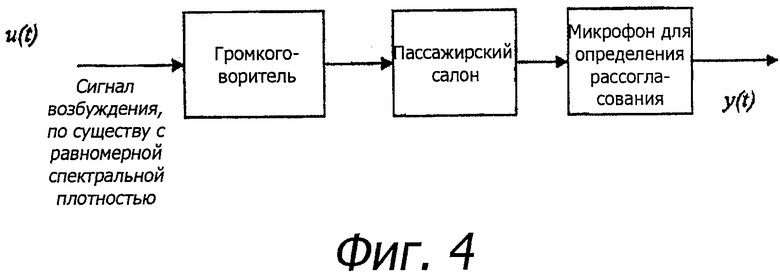
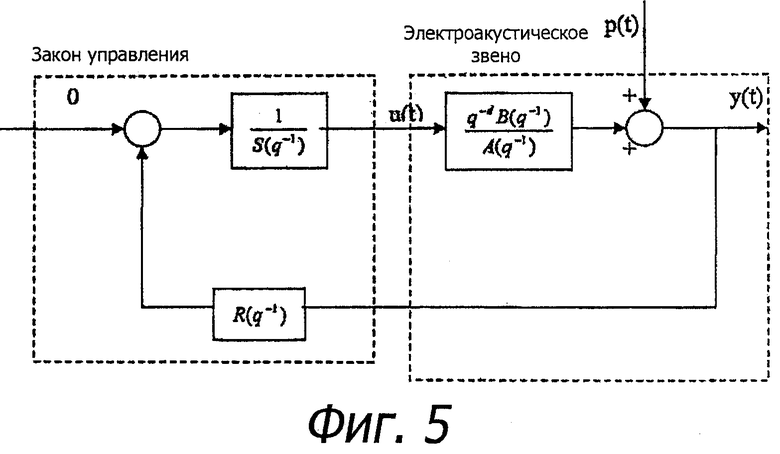
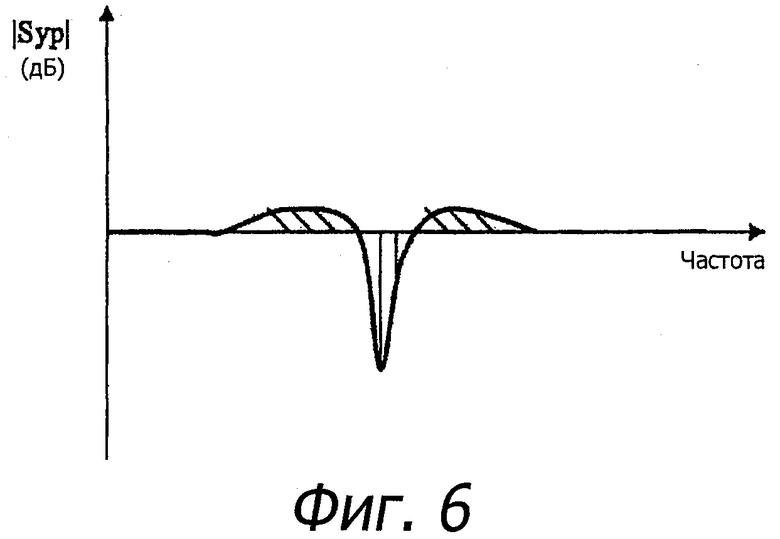
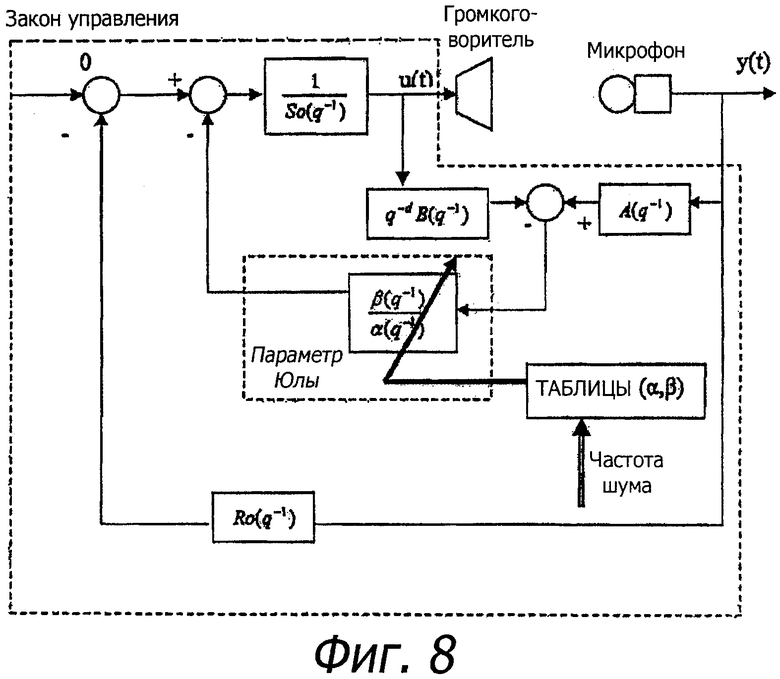
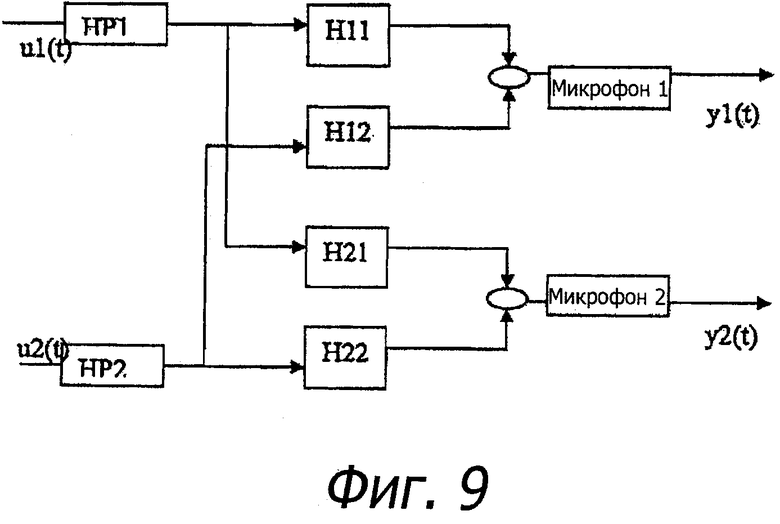
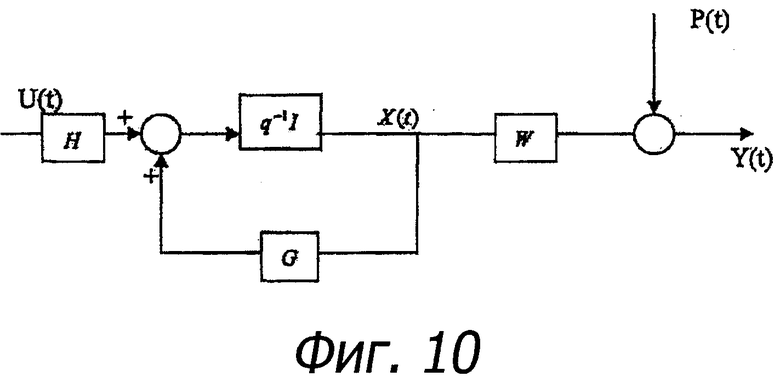
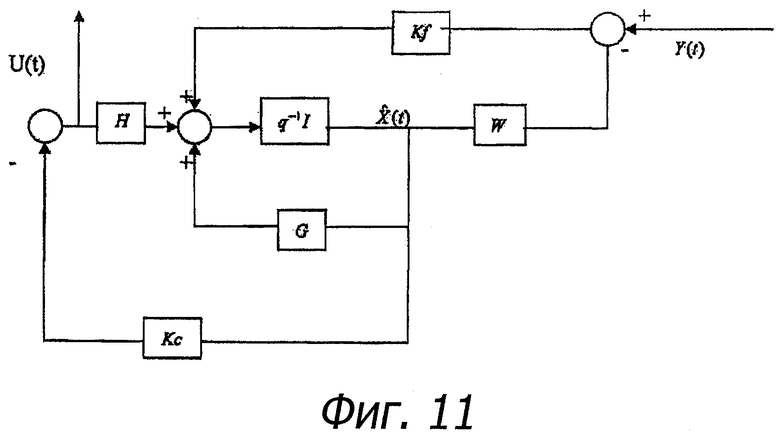
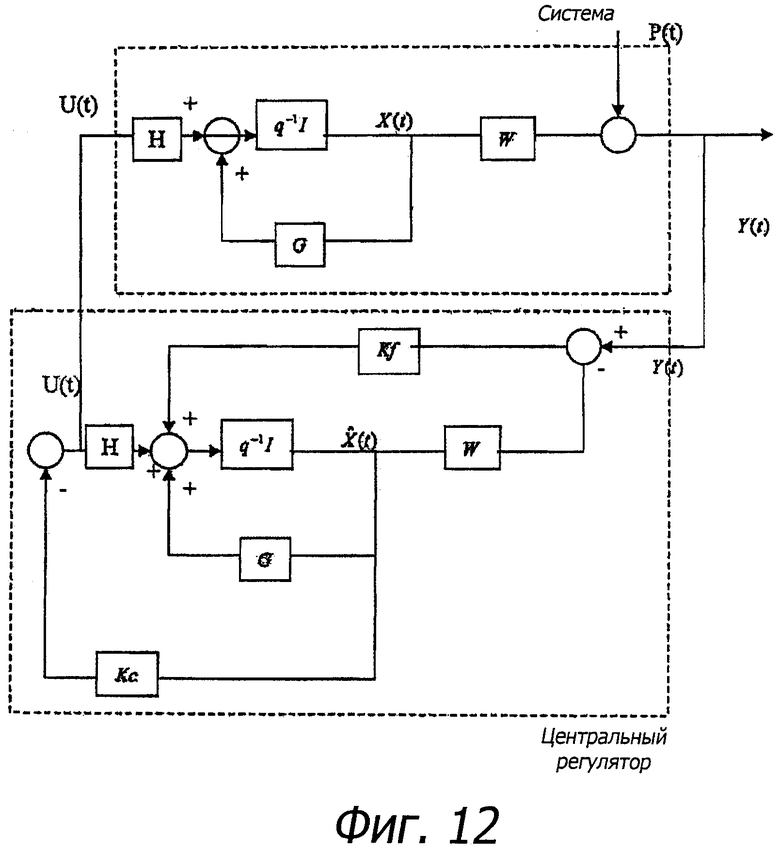
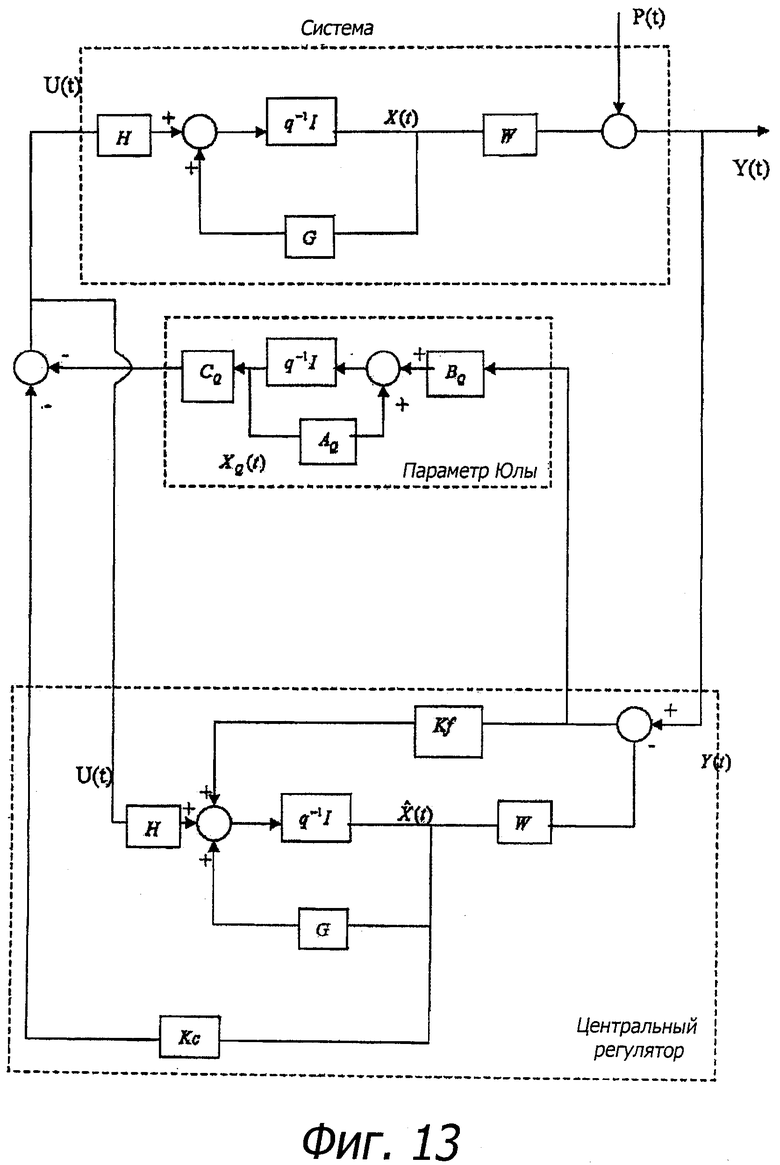
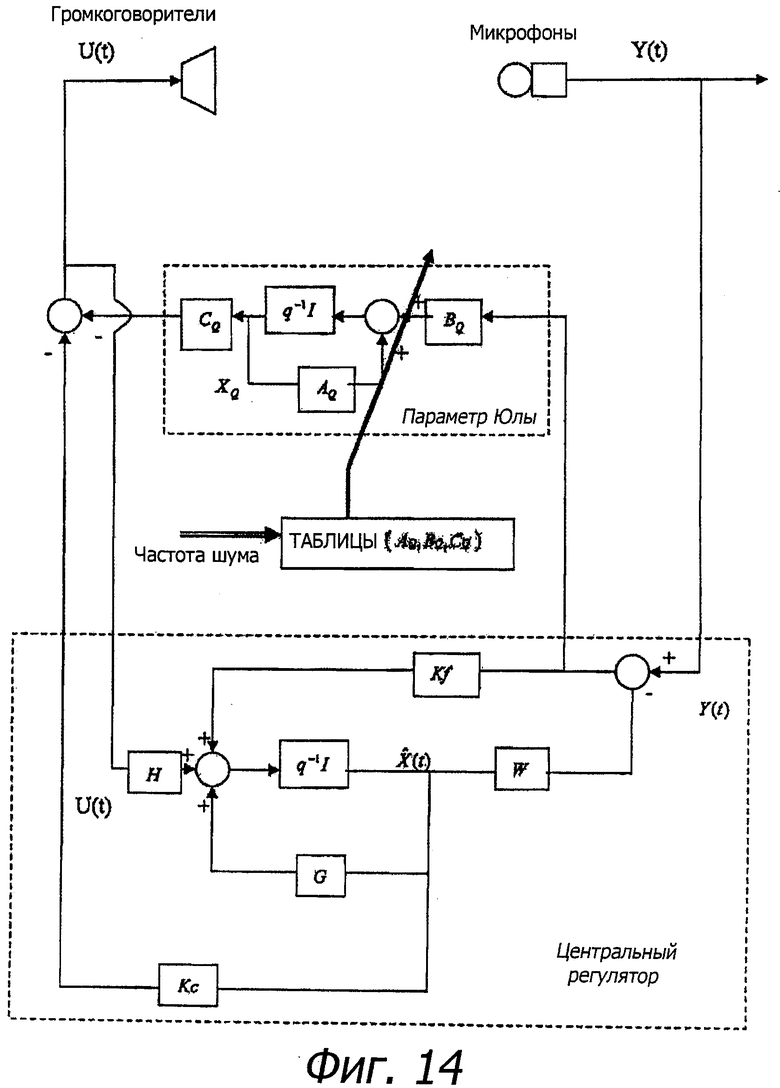
Использование: в способе и устройстве для подавления узкополосных шумов в пассажирском салоне транспортного средства. Сущность: устройство для подавления шума в пассажирском салоне транспортного средства включает в себя, по меньшей мере, один преобразователь, программируемый компьютер, по меньшей мере, один акустический датчик, причем компьютер сконфигурирован таким образом, чтобы применять электроакустическую модель пассажирского купе к модели корректирующей системы, содержащей центральный регулятор с фиксированными коэффициентами, присоединенный к блоку с переменными коэффициентами, содержащему параметр Юлы, в виде блока Q Юлы. В способе первая стадия включает в себя определение и расчет электроакустической модели и закона управления по меньшей мере для одной предварительно заданной частоты шума. На второй стадии, в режиме реального времени, компьютер применяет закон управления к электроакустической модели в соответствии с текущей частотой шума, подлежащего подавлению. 2 н. и 13 з.п. ф-лы, 14 ил.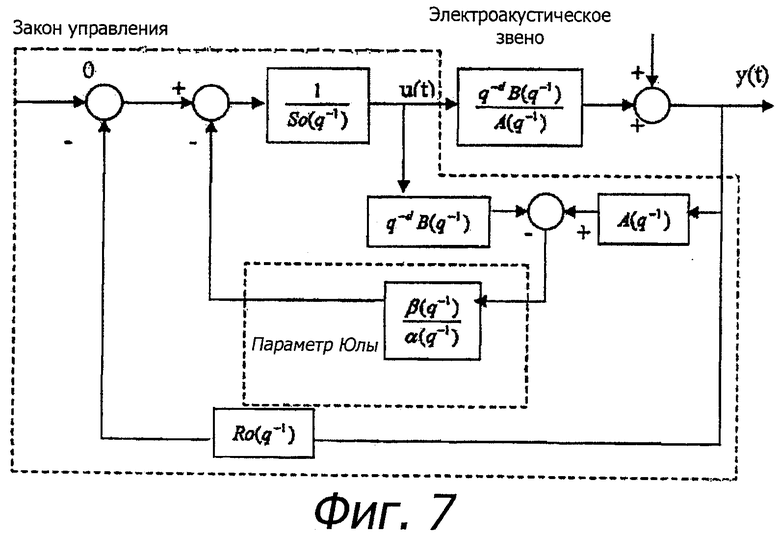
1. Способ активного, в режиме реального времени ослабления узкополосного шума, по существу моночастотного, по меньшей мере на одной определенной частоте, в пассажирском салоне транспортного средства посредством обратной связи, включающий испускание звука по меньшей мере через один преобразователь, обычно громкоговоритель, управляемый сигналом u(t) или U(t) в случае SISO или MIMO соответственно, причем сигнал генерируется программируемым вычислительным устройством в виде функции сигнала акустических измерений y(t) или Y(t), соответствующего указанному случаю, акустические измерения выполняют посредством по меньшей мере одного акустического датчика, обычно микрофона, при этом использование одного датчика соответствует случаю SISO, один вход - один выход - одна переменная, а использование нескольких датчиков соответствует случаю MIMO, множество входов - множество выходов - множество переменных, при этом
на первой стадии - стадии проектирования - моделируют электроакустическую характеристику звена, образованного пассажирским салоном, преобразователем и датчиком, посредством электроакустической модели в виде электроакустической передаточной функции, которую определяют и рассчитывают, после чего определяют и рассчитывают закон управления исходя из глобальной модели системы, в которой указанный закон управления применяют к электроакустической передаточной функции, на выход которой дополнительно подается подлежащий ослаблению сигнал шума p(t), с тем, чтобы на указанной стадии проектирования получить сигнал y(t) или Y(t), при этом указанный закон управления позволяет формировать сигнал u(t) или U(t) в виде функции акустических измерений y(t) или Y(t), а
на второй стадии - стадии использования - для ослабления упомянутого шума используют рассчитанный закон управления в вычислительном устройстве для формирования сигнала u(t) или U(t), посылаемого затем в преобразователь, в виде функции сигнала y(t) или Y(t), полученного от датчика,
отличающийся тем, что реализуют закон управления, который включает в себя применение параметра Юлы к центральному регулятору и который является таким, что в этом законе управления только параметр Юлы имеет коэффициенты, которые зависят от частоты подлежащего ослаблению шума, при этом центральный регулятор имеет постоянные коэффициенты, параметр Юлы имеет вид фильтра с бесконечной импульсной характеристикой, а после определения и расчета закона управления в памяти вычислительного устройства сохраняют по меньшей мере указанные переменные коэффициенты, предпочтительно в таблице, в виде функции определенной частоты или определенных частот шума p(t), используемого на стадии проектирования, при этом на стадии использования, в режиме реального времени:
получают текущую частоту шума, подлежащего ослаблению,
обеспечивают с помощью вычислительного устройства расчет закона управления, включающего в себя центральный регулятор с параметром Юлы, при этом используют в качестве параметра Юлы сохраненные в памяти коэффициенты для определенной частоты, соответствующей текущей частоте шума, подлежащего ослаблению.
2. Способ по п.1, отличающийся тем, что в случае SISO, один вход - один выход, на стадии проектирования:
а) - на первом этапе используют линейную электроакустическую модель, причем электроакустическая модель имеет форму дискретной рациональной электроакустической передаточной функции, и указанную электроакустическую модель определяют и рассчитывают путем акустического возбуждения пассажирского салона посредством преобразователя и акустических измерений, выполняемых датчиком, и с применением затем процесса идентификации линейной системы, выполняемого с указанными измерениями и указанной моделью,
b) - на втором этапе реализуют центральный регулятор, который применяют к указанной определенной и рассчитанной электроакустической модели, причем центральный регулятор имеет вид RS-регулятора, состоящего из двух блоков - 

c) - на третьем этапе к центральному регулятору присоединяют параметр Юлы для формирования закона управления, причем параметр Юлы имеет вид блока Q(q-1), фильтра с бесконечной импульсной характеристикой, с 
при этом на стадии использования, в режиме реального времени:
- получают текущую частоту шума, подлежащего ослаблению,
- обеспечивают с помощью вычислительного устройства расчет закона управления, включающего в себя RS-регулятор с параметром Юлы, используя в качестве параметра Юлы коэффициенты, рассчитанные для частоты шума, соответствующей текущей частоте шума, подлежащего ослаблению, причем коэффициенты Ro(q-1) и So(q-1) являются постоянными коэффициентами.
3. Способ по п.2, отличающийся тем, что на стадии проектирования выполняют следующие операции:
a) - на первом этапе пассажирский салон подвергают акустическому возбуждению, подавая на преобразователь сигнал возбуждения, спектральная плотность которого является, по существу, равномерной на эффективной полосе частот,
b) - на втором этапе определяют и рассчитывают полиномы Ro(q-1) и So(q-1) центрального регулятора таким образом, чтобы указанный центральный регулятор был эквивалентен регулятору, рассчитанному посредством размещения полюсов замкнутого контура при применении центрального регулятора к электроакустической передаточной функции, причем n полюсов замкнутого контура помещаются на n полюсов передаточной функции электроакустической системы,
c) - на третьем этапе по меньшей мере для одной частоты шума p(t), включая по меньшей мере указанную определенную частоту шума, подлежащего ослаблению, определяют и рассчитывают числитель и знаменатель блока Q(q-1) Юлы в законе управления в виде функции критерия ослабления, причем блок Q(q-1) выражается в виде отношения 

при этом на стадии использования, в режиме реального времени выполняют следующие операции:
- обеспечивают с помощью вычислительного устройства расчет закона управления, центрального регулятора с постоянными коэффициентами и параметра Юлы с переменными коэффициентами для формирования сигнала u(t), посылаемого в преобразователь, в виде функции акустических измерений y(t), при этом используют для блока Q(q-1) Юлы значения коэффициентов полиномов α(q-1) и β(q-1), определенные и рассчитанные для определенной частоты, соответствующей текущей частоте.
4. Способ по п.2 или 3, отличающийся тем, что для электроакустической модели используют электроакустическую передаточную функцию в виде
где d - количество составляющих задержку периодов дискретизации, В и А - полиномы q-1, приче
B(q-1)=b0+b1·q-1+…bnb·q-nb;
A(q-1)=1+a1·q-1+…ana·q-na,
где bi и ai - скалярные величины и q-1 - оператор задержки периода дискретизации, при этом расчет оценки шума получают путем применения функции q-dB(q-1) к u(t) и вычитания результата из результата применения y(t) к функции A(q-1).
5. Способ по п.2 или 3, отличающийся тем, что для этапа (b) полиномы Ro(q-1) и So(q-1) центрального регулятора определяют и рассчитывают посредством способа размещения полюсов для замкнутого контура, при этом n доминирующих полюсов замкнутого контура, снабженного центральным регулятором, выбираются равными n полюсам электроакустической передаточной функции и m вспомогательных полюсов являются полюсами, расположенными на высокой частоте.
6. Способ по п.1, отличающийся тем, что на стадии проектирования:
a) - на первом этапе используют линейную электроакустическую модель, при этом электроакустическая модель имеет вид представления состояния матричных блоков Н, W, G, q-1 и I, где G - матрица перехода, Н - входная матрица, W - выходная матрица, и I - единичная матрица, при этом представление состояния может быть выражено рекуррентным уравнением
X(t+Te)=G·X(t)+H·U(t);
Y(t)=W·X(t),
где X(t) - вектор состояния, U(t) - вектор входных сигналов; Y(t) - вектор выходных сигналов,
причем электроакустическую модель определяют и рассчитывают путем акустического возбуждения пассажирского салона посредством преобразователей и акустических измерений, выполняемых датчиками, с применением затем процесса идентификации линейной системы, выполняемого с указанными измерениями и указанной моделью,
b) - на втором этапе реализуют центральный регулятор, применяемый к указанной определенной и рассчитанной модели, причем центральный регулятор имеет вид "наблюдателя" состояния и обратной связи по оцененному состоянию, которая итеративно выражает 

где управляющее воздействие 
и определяют и рассчитывают указанный центральный регулятор,
c) - на третьем этапе к центральному регулятору присоединяют параметр Юлы для формирования закона управления, причем параметр Юлы имеет вид блока Q для случая MIMO, множество входов - множество выходов - множество переменных, состоящего из матриц AQ, BQ, CQ состояний, присоединенного к центральному регулятору, также выражающемуся в виде представления состояния; блок Q, выходной сигнал которого, сложенный с выходным сигналом центрального регулятора, образует сигнал, который формирует сигнал, противоположный U(t), и на входе которого принимается сигнал Y(t), из которого вычтен сигнал 

при этом на стадии использования, в режиме реального времени:
- получают текущую частоту шума, подлежащего ослаблению,
- обеспечивают с помощью вычислительного устройства расчет закона управления, включающего в себя центральный регулятор с постоянными коэффициентами и параметр Юлы с переменными коэффициентами, используя в качестве параметра Юлы коэффициенты, рассчитанные для частоты шума, соответствующей текущей частоте шума, подлежащего ослаблению.
7. Способ по п.6, отличающийся тем, что на стадии проектирования выполняют следующие операции:
a) - на первом этапе пассажирский салон подвергают акустическому возбуждению, подавая на преобразователи сигналы возбуждения, спектральная плотность, которых по существу, равномерна на эффективной полосе частот, причем сигналы возбуждения являются декоррелированными по отношению друг к другу,
b) - на втором этапе определяют и рассчитывают центральный регулятор таким образом, чтобы он был эквивалентен регулятору с "наблюдателем" состояния и обратной связью по рассчитанному состоянию, посредством размещения полюсов при применении центрального регулятора к электроакустической передаточной функции, причем с этой целью выбирают нулевой коэффициент усиления "наблюдателя", то есть Kf=0, и коэффициент Кс усиления обратной связи по состоянию выбирают таким образом, чтобы обеспечить робастность закона управления, снабженного параметром Юлы, посредством LQ-оптимизации,
c) - на третьем этапе при рассмотрении представления увеличенного "наблюдателя" состояния определяют и рассчитывают коэффициенты блока Q Юлы в законе управления по меньшей мере для одной частоты шума P(t), включая по меньшей мере указанную определенную частоту шума, подлежащего ослаблению, в виде функции критерия ослабления таким образом, чтобы получить значения коэффициентов параметра Юлы для указанной частоты или каждой частоты,
при этом на стадии использования, в режиме реального времени, выполняют следующие операции:
- обеспечивают с помощью вычислительного устройства расчет закона управления, центрального регулятора с постоянными коэффициентами и параметра Юлы с переменными коэффициентами для получения сигнала U(t), посылаемого к преобразователям, в виде функции акустических измерений Y(t), при этом используют для параметра Юлы значения коэффициентов, определенные и рассчитанные для определенной частоты, соответствующей текущей частоте.
8. Способ по любому из пп.2, 3, 6 и 7, отличающийся тем, что способ приспособлен для множества определенных частот шума, подлежащего ослаблению, и этап (с) повторяют для каждой из указанных определенных частот, при этом на стадии использования в случае, когда ни одна из указанных определенных частот не соответствует текущей частоте шума, подлежащего ослаблению, производят интерполяцию на указанной текущей частоте для значений коэффициентов блока Q Юлы на основе значений коэффициентов указанного блока Q Юлы, которые известны для указанных определенных частот.
9. Способ по любому из пп.2, 3, 6 и 7, отличающийся тем, что дискретизацию сигналов производят с частотой Fe, а на этапе (а) эффективная полоса частот, используемых для сигнала возбуждения, по существу, равна [0, Fe/2].
10. Способ по любому из пп.2, 3, 6 и 7, отличающийся тем, что перед стадией использования, к стадии проектирования добавляют четвертый этап (d), предназначенный для проверки устойчивости и робастности модели электроакустической системы и закона управления, центрального регулятора с параметром Юлы, ранее полученного на этапах a)-c), путем выполнения моделирования применения закона управления, полученного на этапах b) и c), применяемого к электроакустической модели, полученной на этапе a), для указанной определенной частоты или определенных частот, и в случае когда заданный критерий устойчивости и/или робастности не удовлетворяется, производят повторение по меньшей мере этапа c) путем изменения критерия ослабления.
11. Способ по любому из пп.1-3, 6 и 7, отличающийся тем, что стадия проектирования представляет собой предварительную стадию и ее выполняют один раз, предварительно по отношению к стадии использования, с сохранением в памяти результатов определения и расчета для использования на стадии использования.
12. Способ по любому из пп.1-3, 6 и 7, отличающийся тем, что текущую частоту шума, подлежащего ослаблению, получают из измерения, производимого счетчиком оборотов двигателя транспортного средства.
13. Способ по любому из пп.1-3, 6 и 7, отличающийся тем, что шум производится на одной определенной частоте fpert.
14. Способ по любому из пп.1-3, 6 и 7, отличающийся тем, что шум производится на двух определенных частотах: с первой частотой fpert и второй частотой η.fpert, где η является константой или непрерывно изменяется с fpert.
15. Устройство для осуществления способа по любому из пп.1-14 для ослабления узкополосного шума, по существу, моночастотного, по меньшей мере на одной определенной частоте, содержащее по меньшей мере один преобразователь, обычно громкоговоритель, управляемый сигналом, генерируемым программируемым вычислительным устройством в виде функции сигнала акустических измерений, выполняемых по меньшей мере одним акустическим датчиком, обычно микрофоном, при этом на первой стадии - стадии проектирования - определен и рассчитан закон управления, и указанный рассчитанный закон управления используется на второй стадии - стадии использовании - в вычислительном устройстве для получения сигнала, посылаемого в преобразователь, в виде функции сигнала, принимаемого от датчика, для ослабления указанного шума, отличающееся тем, что содержит средства для реализации в вычислительном устройстве закона управления, включающего применение параметра Юлы к центральному регулятору, причем в указанном законе управления лишь один передаточный блок с переменными коэффициентами соответствует параметру Юлы, имеющему коэффициенты, которые зависят от частоты шума, подлежащего ослаблению; при этом центральный регулятор имеет постоянные коэффициенты, а в памяти вычислительного устройства хранятся по меньшей мере указанные переменные коэффициенты предпочтительно в таблице в виде функции указанной определенной частоты или определенных частот шума p(t), используемых на стадии проектирования.
| loan Dore Landau, Aurelian Constantinescu, Daniel Rey | |||
| Adaptive narrow band disturbance rejection applied to an active suspension - an internal model principle approach | |||
| Automatica, Volume 41, April 2005, pp.563-574 | |||
| Aurelian Constantinescu, Daniel Rey, loan Dore Landau | |||
| Rejection of Narrow Band Unknown Disturbances in an Active Suspension System. |

