Область техники
Изобретение относится к области оптических транспортных сетей (ONT) для передачи данных и, в частности, к способу и устройству компенсации задержки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
С приходом эры 3-го поколения (3G), каждая компания-оператор связи строит сети мобильной связи 3G в большом масштабе с большими инвестициями, и базовые станции представляют собой оборудование, которое имеет наибольшее количество и стоимость в строительстве сетей 3G. Растущая жесткая конкуренция в области мобильной связи заставляет компании-операторы связи уделять больше внимания стоимости строительства сети, и распределенная базовая станция с такими характеристиками, как низкая стоимость, высокая производительность, быстрая работа и тому подобное, может значительно снизить стоимость строительства сети, эксплуатации и обслуживания для компаний-операторов. Поэтому распределенные базовые станции становятся наиболее преобладающим выбором для текущего строительства сети 3G.
Основной идеей распределенной базовой станции является разделение блока обработки базовых частот (BBU) и выносного радиоблока (RRU) традиционной базовой станции макроуровня и соединения их с помощью оптоволокна или оборудования сети доставки информации. Во время развертывания сети BBU управляющее оборудование базовой сети и радиосети сконцентрировано в машинном зале и соединено с RRU, развернутом на планируемой площадке посредством оптических волокон, таким образом завершая покрытие сети.
По сравнению с решением для традиционной базовой станции, решение для распределенной базовой станции не только сильно уменьшает зависимость от машинного зала, расположенного на площадке, уменьшает сложности в развертывании, но также эффективно увеличивает скорость строительства сети, что сильно снижает стоимость строительства сети, эксплуатации и обслуживания для компаний-операторов и полностью удовлетворяет требованию быстрого и дешевого строительства сети, выдвинутого компанией-оператором. Таким образом, вариант строительства сети на основе распределенных базовых станций стал важным выбором для развертывания базовой станции компании-оператора.
Способ реализации для распределенной базовой станции включает отправку цифровых данных базовых частот в RRU посредством радиоинтерфейса общего пользования (CPRI) через оборудование сети доставки информации. CPRI представляет собой стандартный интерфейс, инициированный и сформулированный компаниями, такими как Ericsson, Huawei, NEC, Nortel Networks и Siemens, и сконфигурированный для соединения BBU с RRU. Интерфейс CPRI может быть использован для многих систем 3G и будущего долгосрочного развития (LTE). В настоящий момент технологии прямой передачи по оптоволокну и мультиплексирование с разделением по длине волны/OTN (WDM/OTN) могут удовлетворять требованию передачи CPRI. CPRI на основе OTN может увеличивать степень использования пропускной способности оптоволокна, поддерживать передачу на большее расстояние, обеспечивать возможность полной защиты и полное управление оптическим уровнем, поддерживать любую топологию сети, упрощать эксплуатацию и проведение обслуживания, простым образом реализовывать увеличение пропускной способности и увеличивать скорость запуска новой радиоуслуги; и CPRI на основе OTN также может увеличивать расстояние передачи и может обеспечивать защиту. Таким образом, CPRI на основе OTN может быть широко применен компаниями-операторами.
При условии, что радиооборудование не применяет распределенную базовую станцию и применяет OTN оборудование, механизм компенсации задержки реализуется внутри радиооборудования, и вместе с крупномасштабным применением OTN оборудования для радиосвязи, существует необходимость в OTN оборудовании для решения проблемы задержки (для технического требования применения сети всенаправленной отправки на базовой станции мобильной связи, задержка отправки каждого канала отправки на порту антенны должна быть синхронизирована в пределах допустимого диапазона значений, то есть, выдвигается требование к синхронизации и передаче всех RRU в определенный промежуток времени).
Сущность изобретения
Вариант осуществления настоящего изобретения предусматривает способ и устройство компенсации задержки, которые легко достигают цели синхронизации и передачи RRU всего радиооборудования в определенный промежуток времени путем компенсации задержки посредством оборудования сети доставки информации при условии отсутствия влияния на функцию исходного оборудования.
Способ компенсации задержки включает:
получение сопровождающего сигнала, передаваемого вместе со служебным сигналом, в процессе передачи служебного сигнала из первого оборудования во второе оборудование;
получение, соответственно, первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи во втором оборудовании;
получение первого разностного значения между первым значением задержки и первым заданным значением задержки первого оборудования и второго разностного значения между вторым значением задержки и вторым заданным значением задержки второго оборудования;
вставку первого разностного значения в служебный сигнал и его передачу вместе со служебным сигналом во второе оборудование;
извлечение первого разностного значения из служебного сигнала на втором оборудовании и получение значения компенсации задержки, требуемого в процессе передачи служебного сигнала, в соответствии с первым разностным значением и вторым разностным значением; и
выполнение компенсации задержки на служебном сигнале в процессе передачи служебного сигнала в соответствии со значением компенсации задержки.
Альтернативно, этап получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи во втором оборудовании, соответственно включает:
извлечение сопровождающего сигнала в первом заданном положении первого оборудования и получение информации сопровождающего сигнала в первом заданном положении;
извлечение сопровождающего сигнала во втором заданном положении первого оборудования и получение информации сопровождающего сигнала во втором заданном положении; и
получение первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании в соответствии с информацией сопровождающего сигнала в первом заданном положении и втором заданном положении.
Альтернативно, этап получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи во втором оборудовании, соответственно дополнительно включает:
извлечение сопровождающего сигнала в третьем заданном положении второго оборудования и получение информации сопровождающего сигнала в третьем заданном положении;
извлечение сопровождающего сигнала в четвертом заданном положении второго оборудования и получение информации сопровождающего сигнала в четвертом заданном положении; и
получение второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании в соответствии с информацией сопровождающего сигнала в третьем заданном положении и четвертом заданном положении.
Альтернативно, первое заданное значение задержки первого оборудования является максимальным значением задержки, измеренным первым оборудованием в заданный период времени; и второе заданное значение задержки второго оборудования может быть максимальным значением задержки, измеренным вторым оборудованием в заданный период времени.
Альтернативно, формула расчета для значения компенсации задержки является следующей:
значение компенсации задержки = (максимальное значение задержки первого оборудование - первое значение задержки) + (максимальное значение задержки второго оборудования - второе значение задержки).
Альтернативно, этап выполнения компенсации задержки в процессе передачи служебного сигнала в соответствии со значением компенсации задержки включает:
выполнение компенсации задержки в процессе передачи служебного сигнала посредством очереди «первым пришел, первым вышел» (FIFO); при этом выход очереди FIFO может быть управляемым посредством значения компенсации задержки.
Альтернативно, этап управления выходом очереди FIFO посредством значения компенсации задержки включает:
преобразование значения компенсации задержки в N значений цикла тактового сигнала чтения-записи очереди FIFO в соответствии с тактовым сигналом чтения-записи очереди FIFO; и
последовательный вывод служебных сигналов после записи N служебных сигналов в очередь FIFO.
Вариант осуществления настоящего изобретения дополнительно предусматривает устройство компенсации задержки, которое содержит:
модуль извлечения, выполненный с возможностью получения сопровождающего сигнала, передаваемого вместе со служебным сигналом в процессе передачи служебного сигнала из первого оборудования во второе оборудование;
модуль получения задержки, выполненный с возможностью получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи во втором оборудовании, соответственно;
модуль получения разностного значения, выполненный с возможностью получения первого разностного значения между первым значением задержки и первым заданным значением задержки первого оборудования, и второго разностного значения между вторым значением задержки и вторым заданным значением задержки второго оборудования;
модуль вставки, выполненный с возможностью вставки первого разностного значения в служебный сигнал и передачи первого разностного значения вместе со служебным сигналом во второе оборудование;
модуль получения компенсации, выполненный с возможностью извлечения первого разностного значения из служебного сигнала на втором оборудовании, и получения значения компенсации задержки, необходимого в процессе передачи служебного сигнала в соответствии с первым разностным значением и вторым разностным значением; и
модуль компенсации, выполненный с возможностью выполнения компенсации задержки на служебном сигнале в процессе передачи служебного сигнала в соответствии со значением компенсации задержки.
Альтернативно, модуль получения задержки содержит:
первый модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в первом заданном положении первого оборудования и получения информации сопровождающего сигнала в первом заданном положении;
второй модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала во втором заданном положении первого оборудования и получения информации сопровождающего сигнала во втором заданном положении; и
первый подмодуль получения задержки, выполненный с возможностью получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании в соответствии с информацией сопровождающего сигнала в первом заданном положении и втором заданном положении.
Альтернативно, модуль получения задержки дополнительно содержит:
третий модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в третьем заданном положении второго оборудования и получения информации сопровождающего сигнала в третьем заданном положении;
четвертый модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в четвертом заданном положении второго оборудования и получения информации сопровождающего сигнала в четвертом заданном положении; и
второй подмодуль получения задержки, выполненный с возможностью получения второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании в соответствии с информацией сопровождающего сигнала в третьем заданном положении и четвертом заданном положении.
Альтернативно, первое заданное значение задержки первого оборудования является максимальным значением задержки, измеренным первым оборудованием в заданный период времени; и второе заданное значение задержки второго оборудования является максимальным значением задержки, измеренным вторым оборудованием в заданный период времени.
Альтернативно, формула расчета для значения компенсации задержки, в частности, является следующей:
значение компенсации задержки = (максимальное значение задержки первого оборудование - первое значение задержки) + (максимальное значение задержки второго оборудования - второе значение задержки).
Альтернативно, модуль компенсации может содержать:
подмодуль компенсации, выполненный с возможностью выполнения компенсации задержки в процессе передачи служебного сигнала посредством очереди FIFO; при этом выход очереди FIFO может быть управляемым посредством значения компенсации задержки.
Альтернативно подмодуль компенсации содержит: модуль преобразования, выполненный с возможностью преобразования значения компенсации задержки в N значений цикла тактового сигнала чтения-записи очереди FIFO в соответствии с тактовым сигналом чтения-записи очереди FIFO; и
модуль вывода, выполненный с возможностью последовательного вывода служебных сигналов после записи N служебных сигналов в очередь FIFO.
В способе компенсации задержки варианта осуществления настоящего изобретения значения задержки сопровождающего сигнала, переданного вместе со служебным сигналом в первом оборудовании и втором оборудовании, получают для вычисления значения компенсации задержки, требуемого в процессе передачи служебного сигнала и выполнения компенсации задержки на служебном сигнале; и цель синхронизации и передачи RRU всего радиооборудования в определенный промежуток времени за счет компенсации задержки посредством оборудования сети доставки информации легко достигают при условии отсутствия влияния на функции исходного оборудования, тем самым удовлетворяя техническое требование сети всенаправленной отправки на базовой станции мобильной связи.
Краткое описание чертежей
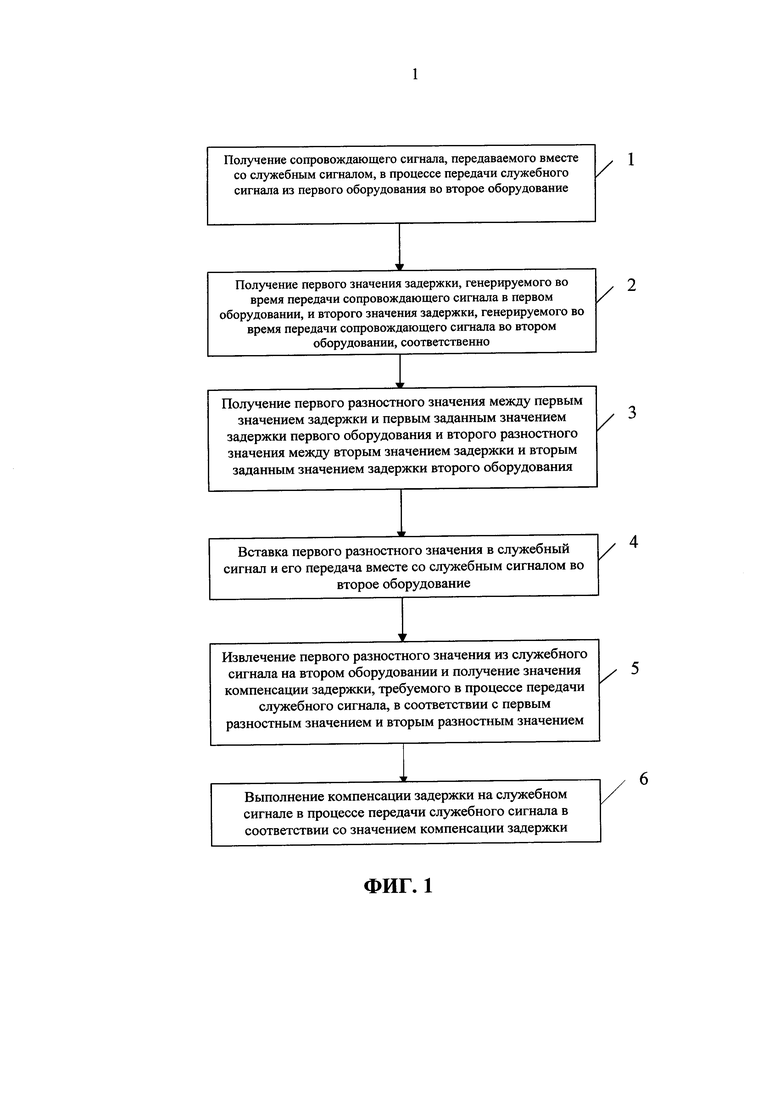
На фиг. 1 изображена блок-схема основных этапов способа компенсации задержки в соответствии с вариантом осуществления настоящего изобретения;
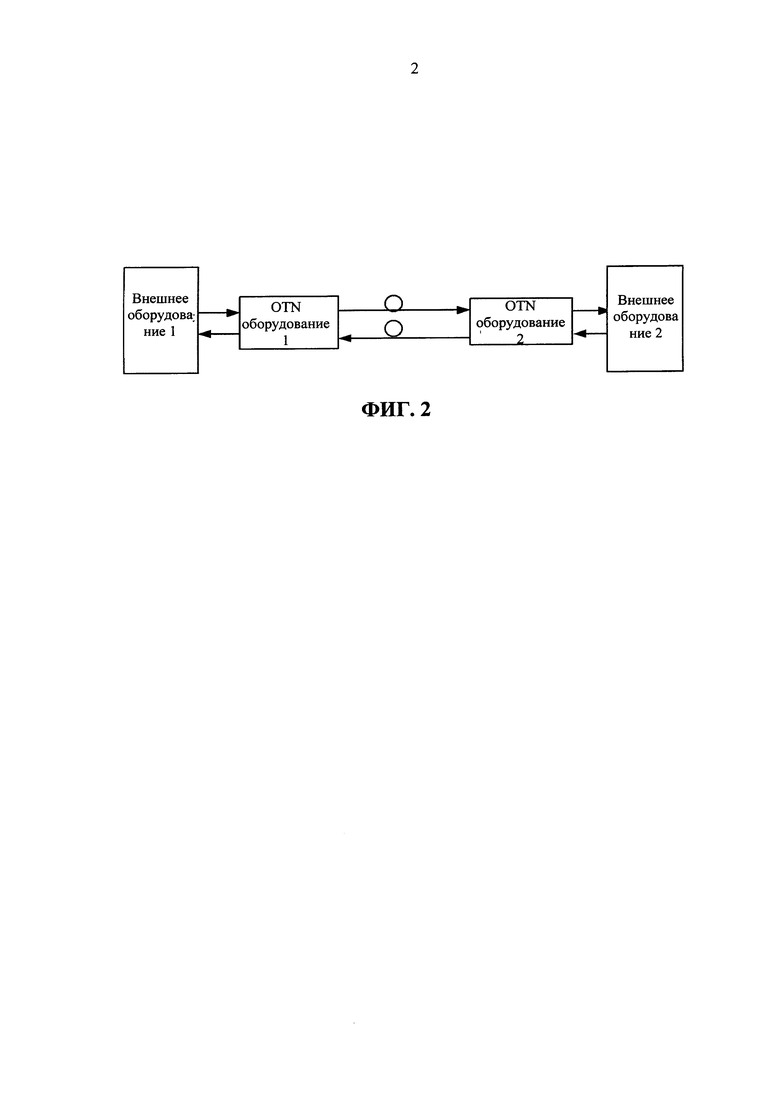
на фиг. 2 изображена структурная схема случая 1 применения способа компенсации задержки в соответствии с одним вариантом осуществления настоящего изобретения;
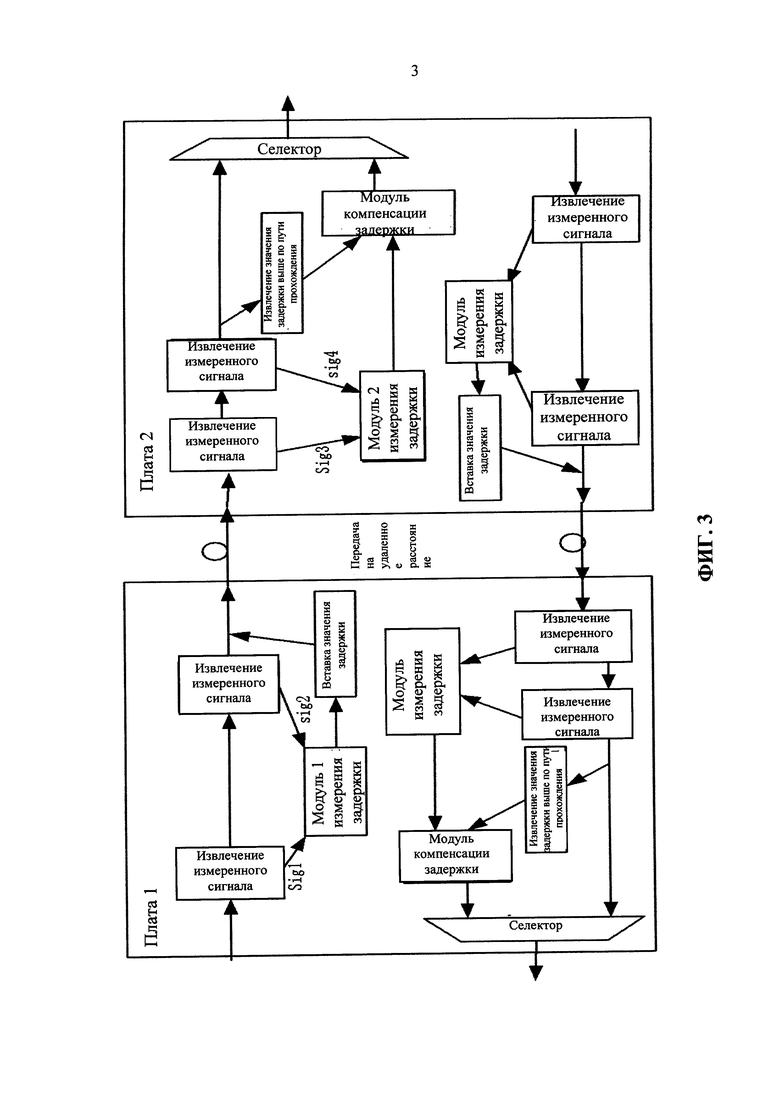
на фиг. 3 изображена структурная схема передачи сигнала способа компенсации задержки в соответствии с одним вариантом осуществления настоящего изобретения;
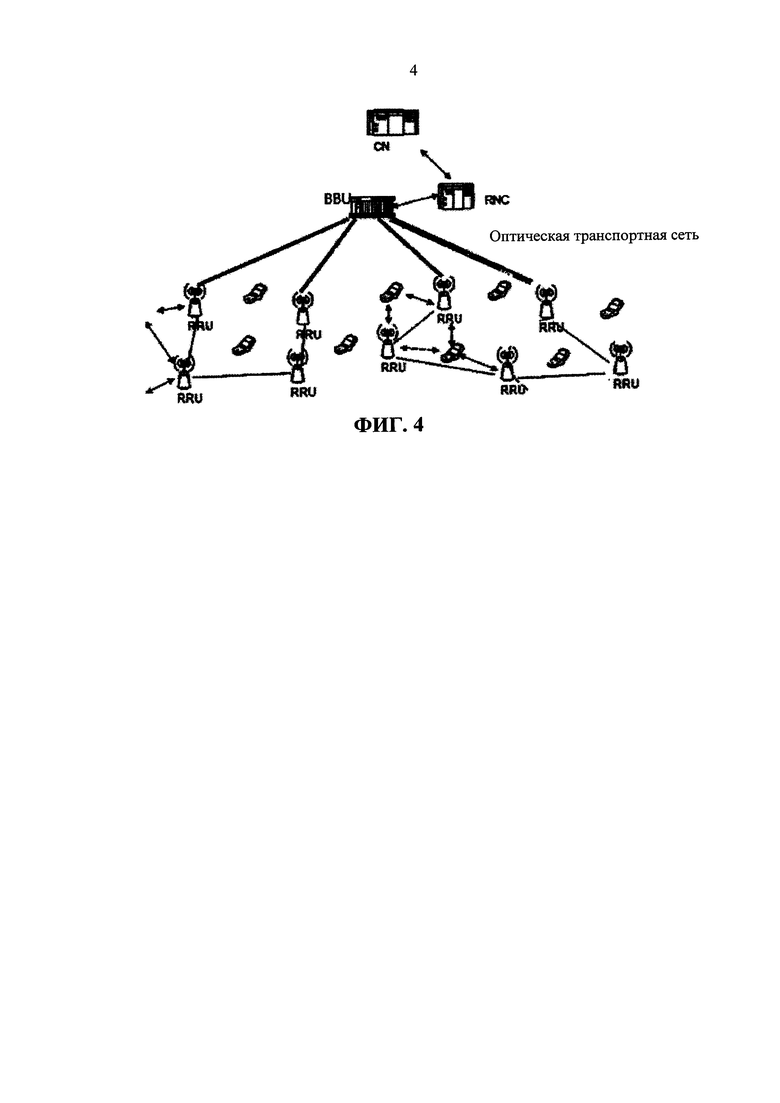
на фиг. 4 изображена базовая топологическая схема сети в конкретном варианте осуществления 1 в соответствии с одним вариантом осуществления настоящего изобретения;
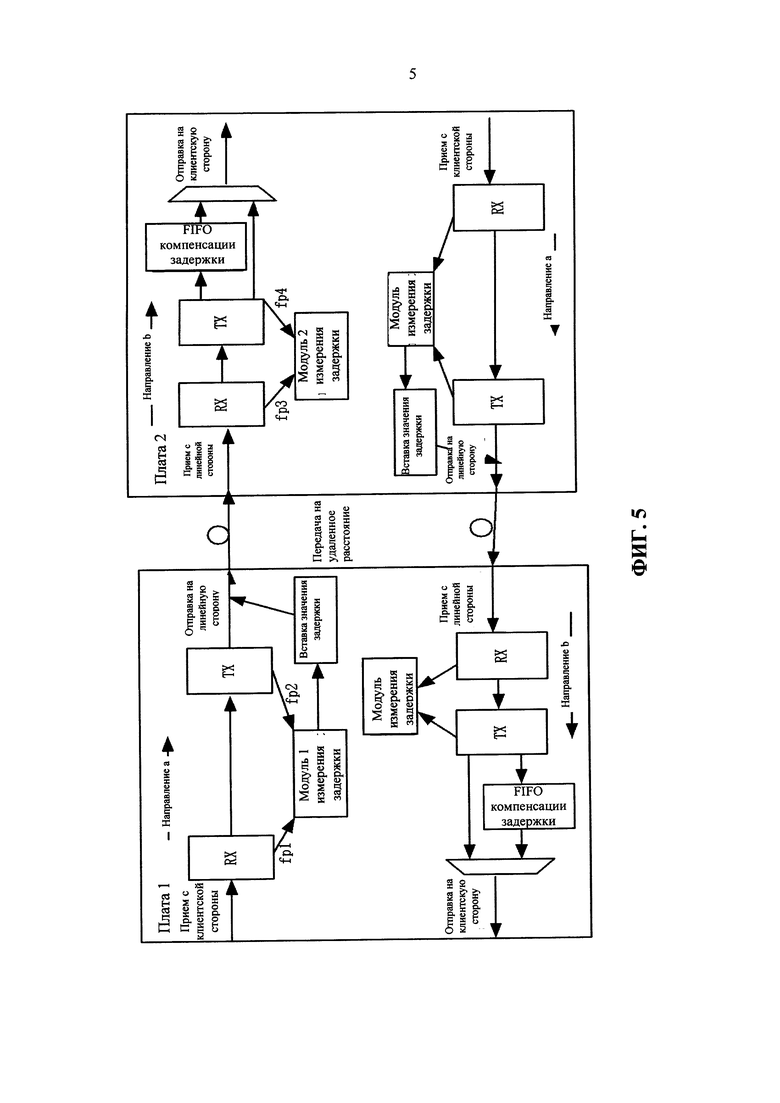
на фиг. 5 изображена блочная схема доступа услуги CPRI6 в конкретном варианте осуществления 1 в соответствии с одним вариантом осуществления настоящего изобретения;
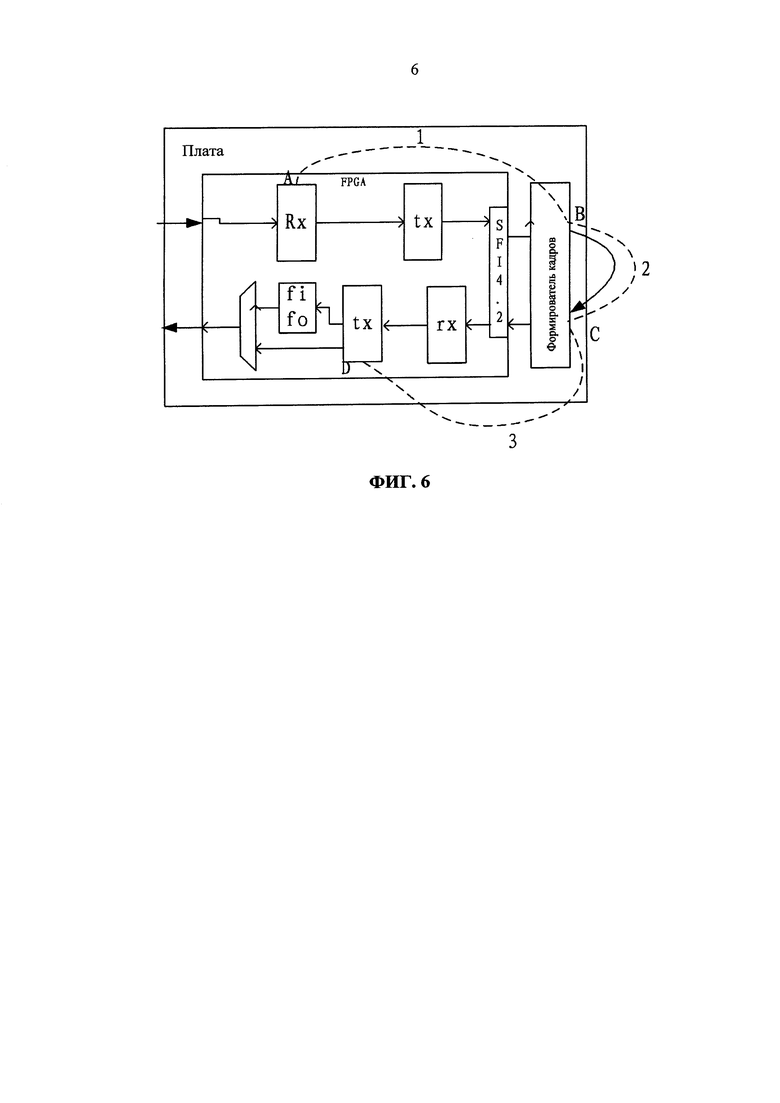
на фиг. 6 изображено схематическое представление пути измерения задержки в конкретном варианте осуществления 1 в соответствии с одним вариантом осуществления настоящего изобретения;
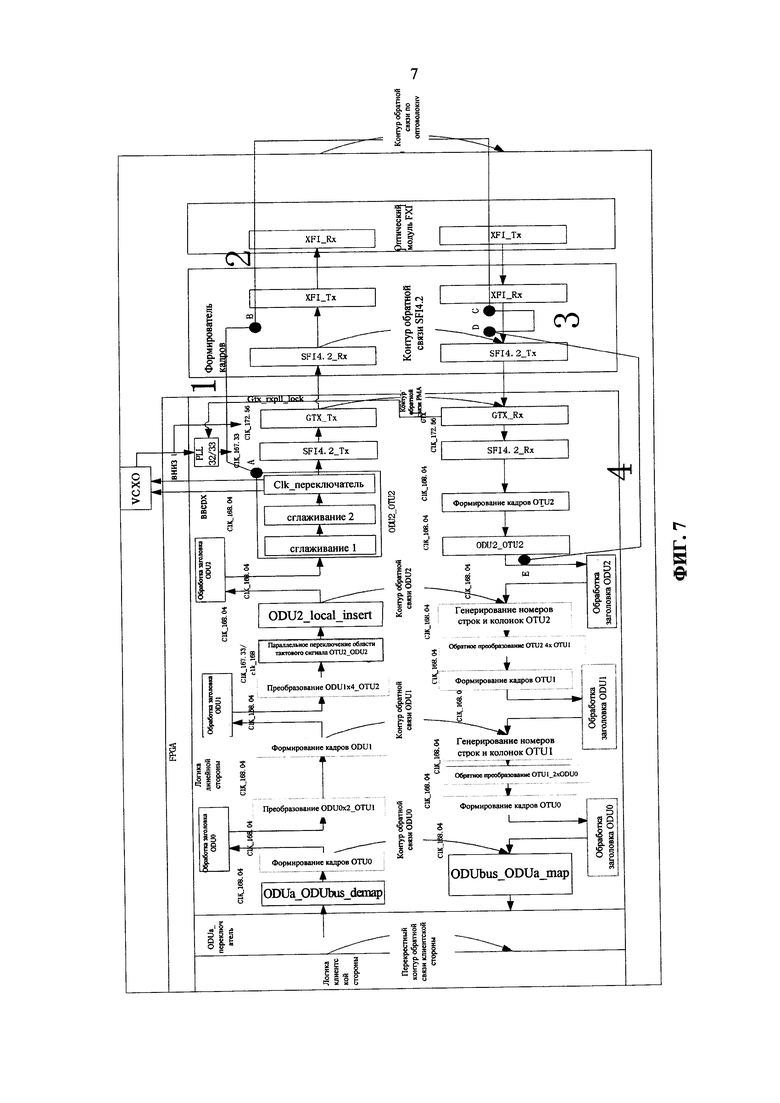
на фиг. 7 изображена структурная схема внутренней логики программируемой пользователем логической матрицы (FPGA) и формирователя кадров в конкретном варианте осуществления 2 в соответствии с одним вариантом осуществления настоящего изобретения;
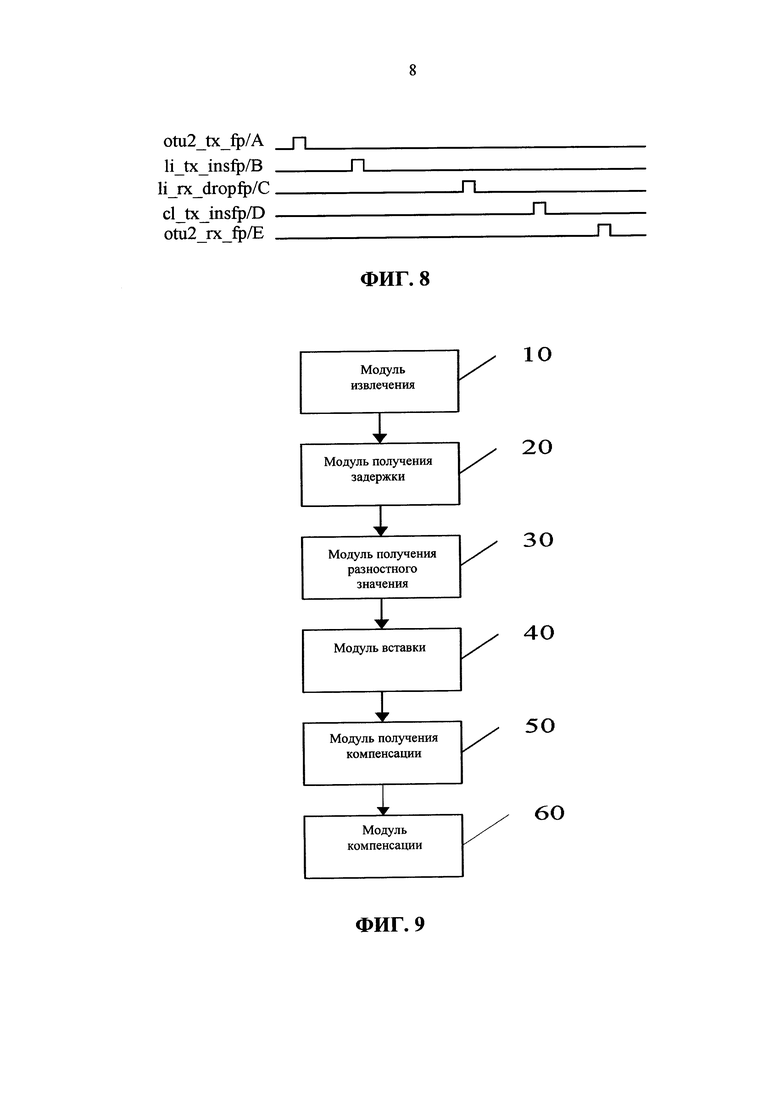
на фиг. 8 изображено схематическое представление относительных положений заголовков кадров в каждой точке в конкретном варианте осуществления 2 в соответствии с одним вариантом осуществления настоящего изобретения; и
на фиг. 9 изображена структурная схема устройства компенсации задержки в соответствии с одним вариантом осуществления настоящего изобретения.
Конкретные варианты осуществления
Конкретные варианты осуществления настоящего изобретения будут подробно описаны ниже со ссылкой на чертежи. Варианты осуществления настоящего изобретения и характеристики в вариантах осуществления могут быть свободно скомбинированы при условии отсутствия конфликтов.
Для решения проблемы, заключающейся в отсутствии возможности устранения задержки между двумя компонентами отдельного оборудования вследствие того, что все радиооборудование применяет внутренние механизмы компенсации задержки в связанной технологии, вариант осуществления настоящего изобретения предусматривает способ и устройство компенсации задержки. Значения задержки сопровождающего сигнала, переданного вместе со служебным сигналом в первом оборудовании и втором оборудовании, получают для вычисления значения компенсации задержки, требуемого в процессе передачи служебного сигнала и выполнения компенсации задержки на служебном сигнале; и цель синхронизации и передачи RRU всего радиооборудования в определенный промежуток времени за счет компенсации задержки посредством оборудования сети доставки информации легко достигают при условии отсутствия влияния на функции исходного оборудования, тем самым удовлетворяя техническое требование сети всенаправленной отправки на базовой станции мобильной связи.
Как показано на фиг. 1, вариант осуществления настоящего изобретения предусматривает способ компенсации задержки, который включает:
этап 1: получение сопровождающего сигнала, передаваемого вместе со служебным сигналом, в процессе передачи служебного сигнала из первого оборудования во второе оборудование;
этап 2: получение, соответственно, первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи во втором оборудовании;
этап 3: получение первого разностного значения между первым значением задержки и первым заданным значением задержки первого оборудования и второго разностного значения между вторым значением задержки и вторым заданным значением задержки второго оборудования;
этап 4: вставка первого разностного значения в служебный сигнал, передаваемый вместе со служебным сигналом во второе оборудование;
этап 5: извлечение первого разностного значения из служебного сигнала на втором оборудовании и получение значения компенсации задержки, требуемого в процессе передачи служебного сигнала, в соответствии с первым разностным значением и вторым разностным значением; и
этап 6: выполнение компенсации задержки на служебном сигнале в процессе передачи служебного сигнала в соответствии со значением компенсации задержки.
В вышеупомянутом варианте осуществления настоящего изобретения сопровождающий сигнал с этапа 1 может быть определенным сигналом, извлеченным из служебного сигнала и относящимся к услуге, и также может быть еще другой сигнал, вставленный в служебный сигнал, и любой сигнал, который может быть передан вместе со служебным сигналом, применим к варианту осуществления настоящего изобретения. На этапе 2 сопровождающий сигнал с этапа 1 извлекают в положениях, с требованием измерения, первого оборудования и второго оборудования соответственно, и задержки передачи между двумя сигналами в первом оборудовании и втором оборудовании измеряют, чтобы соответствующим образом получить первое значение задержки и второе значение задержки соответственно; при этом первое значение задержки и второе значение задержки могут быть измерены с помощью способа подсчета тактовых сигналов, то есть, тактовый сигнал измерения вставляют в весь процесс передачи служебного сигнала, и значения задержки определяют в соответствии с количеством тактовых сигналов между положениями с требованием измерения.
Так как первое значение задержки в первом оборудовании и второе значение задержки во втором оборудовании являются нестабильными и значения задержки изменяются вместе с изменением таких факторов, как время и интенсивность сигнала, для обеспечения стабильности задержек, задают первое заданное значение задержки первого оборудования и второе заданное значение задержки второго оборудования, и соответствующие разностные значения, т.е. первое разностное значение и второе разностное значение между значениями задержки в реальном времени и заданными значениями задержки получают на этапе 3; при этом первое заданное значение задержки и второе заданное значение задержки специально получают с помощью большого количества экспериментальных данных, и также могут быть получены в соответствии с теоретическими параметрами первого оборудования или второго оборудования путем способа вычисления числовых значений, который не ограничивается фиксированным способом, и все способы, подходящие для корректного получения первого заданного значения задержки и второго заданного значения задержки, применимы к варианту осуществления изобретения.
При этом служебный сигнал компенсируют в соответствии со значением компенсации, требуемым задержками, полученными на этапе 5 посредством устройства задержки или оборудования на этапе 6; при этом устройство задержки или оборудование представляет собой схему задержки, устройство на основе FPGA, переключатель с выдержкой времени или тому подобное, которые не будут подробно разобраны одно за другим в данном документе. Важно отметить следующее: во время практического применения способа компенсации задержки, в частности, описанного в настоящем изобретении, в отношении служебного сигнала в процессе передачи из первого оборудования во второе оборудование, сигналы передают в двух направлениях на каждом компоненте оборудования, при этом оба из них имеют задержку и требуют компенсации задержки, так что необходимо компенсировать задержки в двух направлениях оборудования соответственно для поддержания задержек стабильными в процессе передачи служебного сигнала при выполнении компенсации посредством устройства задержки на этапе 6.
В вышеупомянутом варианте осуществления настоящего изобретения этап 2 включает:
этап 21: извлечение сопровождающего сигнала в первом заданном положении первого оборудования и получение информации сопровождающего сигнала в первом заданном положении;
этап 22: извлечение сопровождающего сигнала во втором заданном положении первого оборудования и получение информации сопровождающего сигнала во втором заданном положении; и
этап 23: получение первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании в соответствии с информацией сопровождающего сигнала в первом заданном положении и втором заданном положении.
Этап 2 может дополнительно включать:
этап 24: извлечение сопровождающего сигнала в третьем заданном положении второго оборудования и получение информации сопровождающего сигнала в третьем заданном положении;
этап 25: извлечение сопровождающего сигнала в четвертом заданном положении второго оборудования и получение информации сопровождающего сигнала в четвертом заданном положении; и
этап 26: получение второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании в соответствии с информацией сопровождающего сигнала в третьем заданном положении и четвертом заданном положении.
В конкретном варианте осуществления настоящего изобретения этапы 21-26 представляют собой этапы получения первого значения задержки и второго значения задержки путем применения способа подсчета тактовых сигналов; при этом тактовый сигнал измерения вставляется в процесс передачи служебного сигнала, и, альтернативно, тактовый сигнал измерения может использовать системный тактовый сигнал системы передачи служебного сигнала, и может также быть независимо заданным тактовым сигналом, без ограничения фиксированной формой.
Альтернативно, первое заданное положение и второе заданное положение первого оборудования задают разным в соответствии с разным оборудованием, без ограничения фиксированными положениями; первая информация тактового сигнала в первом заданном положении представляет собой соответствующее положение первого заданного положения на тактовом сигнале измерения, и вторая информация тактового сигнала во втором заданном положении представляет собой соответствующее положение второго заданного положения на тактовом сигнале измерения; этап 23 далее выполняют для получения первого значения задержки путем вычисления количества тактовых сигналов между первым заданным положением и вторым заданным положением на тактовом сигнале измерения; и, например, существует 4 периода тактового сигнала измерения между первой информацией тактового сигнала и второй информацией тактового сигнала, первое значение задержки представляет собой 4 тактовых сигнала измерения, и, в частности, единицей измерения значения задержки обычно является наносекунда. При этом, процесс получения второго значения задержки соответствует процессу получения первого значения задержки, и они не будут подробно разобраны один за другим в данном документе.
Следует пояснить, что компенсация задержки не выполняется внутри первого оборудования после получения первого значения задержки первого оборудования в варианте осуществления настоящего изобретения, вместо этого первое значение задержки вставляется в служебный сигнал для передачи во второе оборудование, и, альтернативно, первое значение задержки передается путем применения зарезервированной служебной информации OTN, чтобы выполнить взаимодействие двух компонентов отдельного оборудования.
В вышеупомянутом варианте осуществления настоящего изобретения первое заданное значение задержки первого оборудования является максимальным значением задержки, измеренным первым оборудованием в заданный период времени; и второе заданное значение задержки второго оборудования является максимальным значением задержки, измеренным вторым оборудованием в заданный период времени.
В данном варианте осуществления настоящего изобретения способ получения максимального значения задержки первого оборудования и максимального значения задержки второго оборудования может быть следующим: относительно более точное максимальное значение задержки может быть получено путем измерения множества компонентов одинакового оборудования и выполнения подачи питания, прерывания подачи питания и подсоединения и отсоединения оптоволокна по меньшей мере 100 раз для получения экспериментальных данных и анализа экспериментальных данных.
В вышеупомянутом варианте осуществления настоящего изобретения формула расчета для значения компенсации задержки является следующей:
значение компенсации задержки = (максимальное значение задержки первого оборудование - первое значение задержки) + (максимальное значение задержки второго оборудования - второе значение задержки).
Следует пояснить, что формула расчета для значения компенсации задержки в указанном варианте осуществления изобретения является лишь необязательным вариантом осуществления изобретения и не предназначена для ограничения объема защиты настоящего изобретения, и любой другой алгоритм, имеющий возможность корректного вычисления значения компенсации задержки, может быть применен в указанных вариантах осуществления настоящего изобретения.
В вышеупомянутом варианте осуществления настоящего изобретения этап 6 включает:
этап 61: выполнение компенсации задержки в процессе передачи служебного сигнала посредством очереди FIFO, при этом выход очереди FIFO является управляемым посредством значения компенсации задержки.
При этом очередь FIFO представляет собой традиционный последовательный способ выполнения, сначала выполняется и завершается команда ввода, а затем выполняется вторая команда. Принцип очереди FIFO следующий: очередь FIFO не классифицирует сообщения, очередь FIFO позволяет сообщениям поступать в очередь в соответствии с последовательностью поступления сообщений в интерфейс, при этом очередь FIFO позволяет сообщениям покидать очередь в соответствии с последовательностью поступления на выходе очереди, сообщения, которые поступили в очередь раньше, покидают очередь раньше, а сообщения, которые поступили в очередь позже, покидают очередь позже.
В конкретном варианте осуществления настоящего изобретения этап управления выходом очереди FIFO посредством значения компенсации задержки включает:
этап 62: преобразование значения компенсации задержки в N значений цикла тактового сигнала чтения-записи очереди FIFO в соответствии с тактовым сигналом чтения-записи очереди FIFO; N - целое число, которое больше или равно 1.
Этап 63: последовательный вывод N служебных сигналов после записи служебных сигналов в очередь FIFO.
Все еще для вышеупомянутого примера, в конкретном применении настоящего изобретения очередь FIFO эквивалентна кэшу, и, если количество служебных сигналов в очереди FIFO меньше N, очередь FIFO не считывает внешним образом данные, но поддерживает внутреннюю запись данных; если количество служебных сигналов в очереди FIFO равно N, выходной конец очереди FIFO может внешним образом считывать компонент данных, каждый раз, когда компонент данных записывается в очередь FIFO; следует пояснить, что данные непрерывно записываются в очередь FIFO и очередь FIFO может поддерживать внешнее считывание данных, если служебные сигналы передаются все время; при этом, так как количество служебных сигналов в очереди FIFO равно N, обеспечивается то, что каждый служебный сигнал выводится из второго оборудования с максимальным значением задержки, тем самым обеспечивая стабильность задержки.
Тактовый сигнал чтения-записи очереди FIFO в вышеупомянутом варианте осуществления настоящего изобретения также может применять системный тактовый сигнал или применять тактовый сигнал, соответствующий вышеупомянутому тактовому сигналу измерения. Если тактовый сигнал чтения-записи очереди FIFO соответствует тактовому сигналу измерения при вычислении значения задержки и значения компенсации задержки, множество времен периода тактового сигнала может непосредственно применяться для вычисления без преобразования в определенное количество наносекунд, и в этом случае значение компенсации задержки на этапе 62 непосредственно равно N значениям периода тактового сигнала, так что этапы вычисления упрощаются.
Со ссылкой на случай 1 применения процесс компенсации задержки согласно изобретению подробно описан, как показано на фиг. 2 и фиг. 3.
В случае 1 применения, как показано на фиг. 2, два компонента оборудования (OTN оборудование 1 и OTN оборудование 2) в сети доставки информации применяют между двумя компонентами терминального оборудования (внешнее оборудование 1, внешнее оборудование 2) соответственно, и, когда сигнал передается между двумя компонентами терминального оборудования, обычно вносится требование к стабильности задержки, так что требование отправки сигнала на OTN оборудование является относительно строгим, и OTN оборудование необходимо для обеспечения стабильности задержки. С этой целью, настоящее изобретение предусматривает способ компенсации задержки, как показано на фиг. 3.
Этап 1: сначала сигналы, занимающие весь путь, который вероятно генерирует изменение задержки, извлекаются из или вставляются в плату 1 и плату 2 соответственно, сигнал (сопровождающий сигнал) обычно извлекается из или вставляется в место пути прохождения сигнала перед платой 1/сигнальной платой 2 и этот же сигнал извлекается из места пути прохождения сигнала за платой 1/платой 2, и при этом измеряется задержка между двумя сигналами.
Этап 2: делается множество замеров на плате, и максимальные значения, измеренные модулем 1 измерения задержки и модулем 2 измерения задержки, выбираются из всех замеров на плате, максимальные значения задержки оборудования 1 и оборудования определены как Ta_delay_max и Tb_delay_max соответственно.
Этап 3: значения задержки, Ta_delay_now и Tb_delay_now, двух плат измеряют после подачи питания на платы, при этом существует много способов измерения, и, например, время для заголовка кадра от ввода в оборудование до вывода из оборудования измеряется для получения значения задержки.
Этап 4: измеренное значение задержки платы 1 передается в плату 2 путем служебной передачи, и затем измеренное значение задержки (Ta_delay_now) платы 1 извлекается из платы 2.
Этап 5: измеренное значение Ta_delay_now платы 1 и значение задержки Tb_delay_now платы 2 сравнивается с максимальными значениями задержки (Ta_delay_max и Tb_delay_max) для получения разностных значений соответственно, и два разностных значения компенсируются посредством модуля компенсации задержки.
Пример применения 1
Практическое условие способа будет проверено ниже с поддержкой услуги CPRI6 на OTN плате, как пример. Структурная схема применения показана на фиг. 4, и конкретная схема блока обработки услуг на плате показана на фиг. 5.
Здесь клиентская сторона относится к услуге, к которой обращается плата, и линейная сторона относится к услуге, поддерживающей CPRI, и относится к OTN услуге. Процесс обработки услуги предназначен для обработки клиентской услуги и услуги линейной стороны посредством логики FPGA сначала и преобразования служебных сигналов, которые проходят через чип формирователя кадров и достигают оптического порта, в оптические сигналы для передачи.
Во-первых, необходимо измерить секцию с нестабильностью задержки, а затем максимальное значение задержки получают с помощью множества измерений. Здесь задержка, существующая в odu2 слое отправляющей секции линейной стороны, измеряется odu2 заголовком кадра (fp1) в положении ввода платы и заголовком кадра (fp2) в положении вывода платы. Модуль логики, который реализует такое измерение, представляет собой модуль 1 измерения задержки, и первое значение задержки, которое измеряется, представляет собой Ta_delay_now.
Во-вторых, две платы соединены посредством оптоволокна. Например, для OTN, первое значение задержки Ta_delay_now, которое измеряется, может быть передано в нисходящий участок для компенсации посредством области полезной нагрузки или служебной информации OTN.
Затем, задержка секции от принимающей линейной стороны к отправляющей клиентской стороне измеряется с помощью заголовка кадра (fp3) в положении ввода платы и заголовка кадра (fp4) в положении вывода платы. Модуль логики, который реализует такое измерение, представляет собой модуль 2 измерения задержки, и второе значение задержки, которое измеряется, представляет собой Tb_delay_now.
Наконец, логика выполняет операцию на двух значениях задержки и максимальных значениях задержки (Ta_delay_max и Tb_delay_max), которые получены в результате большого количества предварительных испытаний, для получения значения fifo_value. Затем, значение задержки компенсируется посредством компенсации задержки FIFO.
Важно отметить то, что то, является ли тактовый сигнал измерения и тактовый сигнал компенсации задержки FIFO одним и тем же тактовым сигналом или нет, является одним из факторов, которые влияют на погрешность измерения времени. Кроме того, необходимо получить конкретные значения Ta_delay_max и Tb_delay_max путем выполнения большого количества комбинаций замеров на плате для многих промежутков времени.
Процесс измерения задержки показан на фиг. 6.
Анализируется условие изменения задержки OTN платы, и выполняется способ измерения значения задержки Tdelay_now.
На фиг. 6 показано схематическое представление всего процесса обработки услуг OTN платы, при этом клиентская сторона соединена с услугой CPRI6 с пропускной способностью 6,144 Гбит/с, и линейная сторона применяет оптоволокно для контура обратной связи.
Для определения части с нестабильностью задержки, обработкой на клиентской стороне, на линейной стороне, в масштабируемом интерфейсе формирователя кадров с параллельно-последовательным преобразованием 4.2 (SFI4.2) или в формирователе кадров, необходимо извлекать соответствующие испытательные сигналы из логики FPGA и формирователя кадров и затем захватывать сигналы в каждом положении для испытания посредством внутреннего программирования логики или анализатора Chipscope.
Таким образом, находят сигналы индикатора заголовка кадра в четырех положениях А, В, С и D на фиг. 5. Три испытательных пути указаны красной пунктирной линией для выполнения испытания следующим образом.
Положение А: сигнал, извлеченный отправляющей стороной клиентской стороны в логике FPGA.
Положение В: сигнал заголовка кадра, извлеченный из odu2 вставляемой части служебной информации в формирователе кадров, при этом сигнал был расположен перед кодированием с упреждающей коррекцией ошибок (FEC).
Положение С: сигнал заголовка кадра, извлеченный из извлекаемой части служебной информации в формирователь кадров, сигнал был извлечен после кодирования с FEC.
Положение D: сигнал, извлеченный принимающей стороной клиентской стороны в логике FPGA.
После определения четырех положений извлечения сигнала, определяются три испытательных пути, как показано на фиг. 6, и эти три пути охватывают весь процесс обработки услуг:
путь 1: содержит все логические схемы на клиентской стороне и линейной стороне, SFI4.2 и часть модулей обработки в формирователе кадров;
путь 2: содержит схемы кодирования и декодирования и часть от оптического модуля до оптоволокна в формирователе кадров; и
путь 3: содержит часть модулей обработки в формирователе кадров, SFI4.2 и логику линейной стороны и клиентской стороны принимающей стороны.
Три пути испытывают соответственно для получения следующего заключения (такой способ испытания не является основным способом изобретения и не будет рассмотрен тут подробно):
изменения задержки, главным образом, существуют в пути 1 и пути 3, и изменение задержки в другом пути может быть проигнорировано, так что цель компенсации задержки может быть достигнута только путем компенсации путей 1 и 3 для облегчения испытания; и поэтому, fifo добавляется к принимающей стороне линейной стороны FPGA для компенсации задержки для реализации и поддержания максимального значения задержки в стабильном состоянии во время подачи питания каждый раз.
Из вышеупомянутого известно, что первое значение задержки Ta_delay_now и второе значение задержки Tb_delay_now после подачи питания каждый раз представляют собой значения задержки пути 1 и пути 3 соответственно. Две части компенсируются для поддержания значений задержки в стабильном состоянии.
В данном варианте осуществления настоящего изобретения значение задержки, которое должно быть компенсировано посредством Fifo, равно: Tdelay_offset = {(Ta_delay_max - Ta_delay_now) + (Tb_delay_max - Tb_delay_now}.
Все тактовые сигналы чтения-записи FIFO представляют собой системный тактовый сигнал, уровень заполненности fifo управляется посредством Tdelay_offset, если количество служебных сигналов меньше, чем Tdelay_offset, данные не считываются и данные записываются в fifo все время, и, если количество служебных сигналов равно Tdelay_offset, fifo начинает сохранять считанные внешним образом данные, тем самым обеспечивая стабильность задержки.
Пример 1 применения объясняет способ измерения стабильности и компенсации задержки, если плата услуг OTN оборудования поддерживает услугу cpri6. Способ также применяется к услугам, относящимся к CPRI, с другой производительностью, таким как услуги CPRI2/CPRI3/CPRI4/CPRI5/CIPR6/CPRI7, и весь процесс обработки по существу является одинаковым с конкретным вариантом 1 осуществления.
Способ также применяют к другим платам услуг из OTN оборудования, и во время проектирования FPGA услуги, способ может быть применен для компенсации в случае требования стабильности задержки.
Пример применения 2
Выполнимость способа проверяется с поддержкой синхронного Ethernet на плате, как пример.
Сначала определяется то, что изменение задержки клиентской стороны является очень стабильным за счет служебного контура обратной связи, и, чтобы определить то, где создается нестабильность задержки - в SFI4.2, в формирователе кадров, или на принимающей стороне, или на отправляющей стороне, необходимо извлечь соответствующие сигналы из FPGA и формирователя кадров и захватить сигналы в каждом положении для испытания посредством анализатора Chipscope.
Таким образом, находят сигналы индикатора заголовка кадра в четырех положениях А, В, С, D и Е на фиг. 7.
Заголовок кадра в положении А: заголовок кадра данных otu2, которые должны быть отправлены в SFI4.2 на линейной отправляющей стороне в логику FPGA.
Заголовок кадра в положении В: сигнал заголовка кадра, извлеченный из вставляемой части служебной информации в формирователе кадров, сигнал расположен перед кодированием с FEC.
Заголовок кадра в положении С: сигнал заголовка кадра, извлеченный из извлекаемой части служебной информации в формирователе кадров, сигнал расположен после кодирования с FEC.
Заголовок кадра в положении D: заголовок кадра, извлеченный частью служебной информации отправляющей клиентской стороны в формирователе кадров.
Заголовок кадра в положении Е: сигнал заголовка кадра перед извлечением служебной информации OTU2 на линейной принимающей стороне в логике FPGA.
После определения пяти точек извлечения сигнала, определяются четыре испытательных пути, как показано на фиг. 7:
1: от заголовка кадра, извлеченного из заголовка otu2 на линейной стороне FPGA, до li_tx_insfp во вставляемой части служебной информации перед кодированием формирователя кадров;
2: от сигнала li_rx_insfp до сигнала li_rx_dropfp после декодирования формирователя кадров (считается, что сигнал li_rx_dropfp располагается перед декодированием в испытании, выполненном ранее, многими испытаниями доказано, что это неправильно, и сигнал должен располагаться после декодирования из инструкции формирователя кадров);
3: от сигнала li_rx_dropfp до сигнала cl_tx_insfp во вставляемой части служебной информации на отправляющей стороне клиентской стороны формирователя кадров; и
4: от сигнала cl_tx_insfp до заголовка кадра otu2 на принимающей стороне линейной стороны FPGA.
Вышеупомянутые сигналы захватываются с помощью анализатора Chipscope, сигнал заголовка кадра в точке А определяется как запускающий сигнал, и относительные положения точек В, С, D и Е записываются после прерывания подачи питания и подачи питания каждый раз. Осциллограмма показана на фиг. 8.
Количество тактовых сигналов между каждым заголовком кадра и заголовком кадра в точке А вычисляется для получения данных относительной задержки, приведенных в таблице 1.
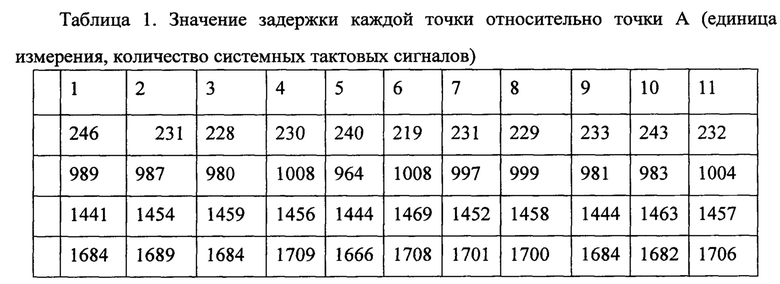
В соответствии с данными выше, если системный тактовый сигнал составляет 6 нс (192 МГц), результаты вычислений являются следующими:
изменение задержки пути (1 + 2) составляет (1469 - 1441)*6 = 168 нс, при этом изменение задержки пути 1 составляет вероятно (246 - 219)*6 = 162 нс, так что изменение задержки кодирования и декодирования формирователя кадров не является большим; и
должен быть найден максимум и минимум из (Е-С) для вычисления разностного значения (253 - 219)*6 = 204 не для изменения задержки пути (3 + 4).
Таким образом, делается следующее заключение: изменения в основном существуют в путях 1 и (3 + 4), и изменение задержки кодирования и декодирования формирователя кадров после прекращения подачи питания и подачи питания платы не является большим.
Нельзя провести испытание кодирования и декодирования в формирователе кадров по отдельности, и, если изменение задержки кодирования и декодирования формирователя кадров является большим, сложно и невозможно применять fifo для компенсации задержки. К счастью, изменение задержки кодирования и декодирования является маленьким и может быть проигнорировано.
Таким образом, значения изменения задержки пути 1 и пути (3 + 4) могут быть испытаны и добавлены на принимающей стороне линейной стороны FPGA для компенсации задержки для реализации и поддержания максимального значения задержки в стабильном состоянии во время подачи питания каждый раз.
Из вышеупомянутого известно, что значения задержки Tldelay_now и T2delay_now после каждого раза подачи питания представляют собой значения задержки пути 1 и пути (3 + 4) соответственно. Задержки этих путей измеряются с помощью системного тактового сигнала, и эффект компенсации задержки наконец достигается в соответствии с вышеупомянутым способом измерения и компенсации.
Для лучшего достижения вышеупомянутой цели, как показано на фиг. 9, вариант осуществления настоящего изобретения дополнительно предусматривает устройство компенсации задержки, которое содержит:
модуль 10 извлечения, выполненный с возможностью получения сопровождающего сигнала, передаваемого вместе со служебным сигналом в процессе передачи служебного сигнала из первого оборудования во второе оборудование;
модуль 20 получения задержки, выполненный с возможностью получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи во втором оборудовании, соответственно;
модуль 30 получения разностного значения, выполненный с возможностью получения первого разностного значения между первым значением задержки и первым заданным значением задержки первого оборудования, и второго разностного значения между вторым значением задержки и вторым заданным значением задержки второго оборудования;
модуль 40 вставки, выполненный с возможностью вставки первого разностного значения в служебный сигнал и передачи первого разностного значения вместе со служебным сигналом во второе оборудование;
модуль 50 получения компенсации, выполненный с возможностью извлечения первого разностного значения из служебного сигнала на втором оборудовании, и получения значения компенсации задержки, необходимого в процессе передачи служебного сигнала в соответствии с первым разностным значением и вторым разностным значением; и
модуль 60 компенсации, выполненный с возможностью выполнения компенсации задержки на служебном сигнале в процессе передачи служебного сигнала в соответствии со значением компенсации задержки.
В вышеупомянутом варианте осуществления настоящего изобретения модуль 20 получения задержки содержит:
первый модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в первом заданном положении первого оборудования и получения информации сопровождающего сигнала в первом заданном положении;
второй модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала во втором заданном положении первого оборудования и получения информации сопровождающего сигнала во втором заданном положении; и
первый подмодуль получения задержки, выполненный с возможностью получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании в соответствии с информацией сопровождающего сигнала в первом заданном положении и втором заданном положении.
В вышеупомянутом варианте осуществления настоящего изобретения модуль 20 получения задержки дополнительно содержит:
третий модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в третьем заданном положении второго оборудования и получения информации сопровождающего сигнала в третьем заданном положении;
четвертый модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в четвертом заданном положении второго оборудования и получения информации сопровождающего сигнала в четвертом заданном положении; и
второй подмодуль получения задержки, выполненный с возможностью получения второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании в соответствии с информацией сопровождающего сигнала в третьем заданном положении и четвертом заданном положении.
В данном варианте осуществления настоящего изобретения первое заданное значение задержки первого оборудования является максимальным значением задержки, измеренным первым оборудованием в заданный период времени; и второе заданное значение задержки второго оборудования является максимальным значением задержки, измеренным вторым оборудованием в заданный период времени.
В данном варианте осуществления настоящего изобретения формула расчета для значения компенсации задержки является следующей:
значение компенсации задержки = (максимальное значение задержки первого оборудования - первое значение задержки) + (максимальное значение задержки второго оборудования - второе значение задержки).
В вышеупомянутом варианте осуществления настоящего изобретения модуль 60 компенсации содержит:
подмодуль компенсации, выполненный с возможностью выполнения компенсации задержки в процессе передачи служебного сигнала посредством очереди FIFO; при этом выход очереди FIFO является управляемым посредством значения компенсации задержки.
В варианте осуществления изобретения подмодуль компенсации содержит:
модуль преобразования, выполненный с возможностью преобразования значения компенсации задержки в N значений цикла тактового сигнала чтения-записи очереди FIFO в соответствии с тактовым сигналом чтения-записи очереди FIFO; и
модуль вывода, выполненный с возможностью последовательного вывода N служебных сигналов после записи служебных сигналов в очередь FIFO.
В устройстве компенсации задержки варианта осуществления настоящего изобретения значения задержки сопровождающего сигнала, переданного вместе со служебным сигналом в первом оборудовании и втором оборудовании, получают для вычисления значения компенсации задержки, требуемого в процессе передачи служебного сигнала и выполнения компенсации задержки на служебном сигнале; и цель синхронизации и передачи RRU всего радиооборудования в определенный промежуток времени за счет компенсации задержки посредством оборудования сети доставки информации легко достигают при условии отсутствия влияния на функции исходного оборудования, тем самым удовлетворяя техническое требование сети всенаправленной отправки на базовой станции мобильной связи.
Следует пояснить, что устройство компенсации задержки, предусмотренное вариантом осуществления настоящего изобретения, представляет собой устройство, применяющее вышеупомянутый способ, все варианты осуществления вышеупомянутого способа применимы к устройству, и могут быть достигнуты такие же или подобные преимущественные эффекты.
Специалистам в данной области техники должно быть понятно, что все или часть этапов вышеупомянутого варианта осуществления могут быть реализованы посредством компьютерной программы, при этом компьютерная программа может быть сохранена на машиночитаемом носителе данных, компьютерная программа выполняется на соответствующей аппаратной платформе (такой как система, оборудование, устройство и аппарат и т.д.), и один или комбинация этапов способа согласно варианту осуществления включается во время выполнения.
Альтернативно, все или часть этапов вышеупомянутого варианта осуществления также могут быть реализованы посредством интегральной схемы, при этом эти этапы могут, соответственно, формировать модули интегральных схем, или множество модулей или этапов при этом могут формировать один модуль интегральных схем для реализации. Таким образом, изобретение не ограничивается комбинацией какого-либо конкретного аппаратного или программного обеспечения.
Каждое устройство/функциональный модуль/функциональный блок в вышеупомянутом варианте осуществления могут быть реализованы посредством универсального вычислительного устройства, и они могут быть сконцентрированы на одном вычислительном устройстве и также могут быть распределены по сети, образованной множеством вычислительных устройств.
При реализации в форме программного функционального модуля и продаже или применении как независимого продукта, каждое устройство/функциональный модуль/функциональный блок в вышеупомянутом варианте осуществления может храниться в машиночитаемом носителе данных. Вышеупомянутый машиночитаемый носитель данных может представлять собой постоянное запоминающее устройство, магнитный диск, компакт-диск или тому подобное.
Промышленная применимость
В соответствии с вариантом осуществления настоящего изобретения, цель синхронизации и передачи RRU всего радиооборудования в определенный промежуток времени за счет компенсации задержки посредством оборудования сети доставки информации легко достигается при условии отсутствия влияния на функции исходного оборудования, тем самым удовлетворяя технологическому требованию сети всенаправленной отправки на базовой станции мобильной связи.
Изобретение относится к области связи. Техническим результатом является решение проблемы задержки. При этом способ включает: получение сопровождающего сигнала, передаваемого вместе со служебным сигналом, в процессе передачи служебного сигнала из первого оборудования во второе оборудование; получение, соответственно, первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи во втором оборудовании; получение первого разностного значения между первым значением задержки и первым заданным значением задержки первого оборудования и второго разностного значения между вторым значением задержки и вторым заданным значением задержки второго оборудования; вставку первого разностного значения в служебный сигнал для передачи во второе оборудование вместе со служебным сигналом; извлечение первого разностного значения из служебного сигнала на втором оборудовании и получение значения компенсации задержки, требуемого в процессе передачи служебного сигнала в соответствии с первым разностным значением и вторым разностным значением; и выполнение компенсации задержки на служебном сигнале в процессе передачи служебного сигнала в соответствии со значением компенсации задержки. 3 н. и 12 з.п. ф-лы, 9 ил., 1 табл.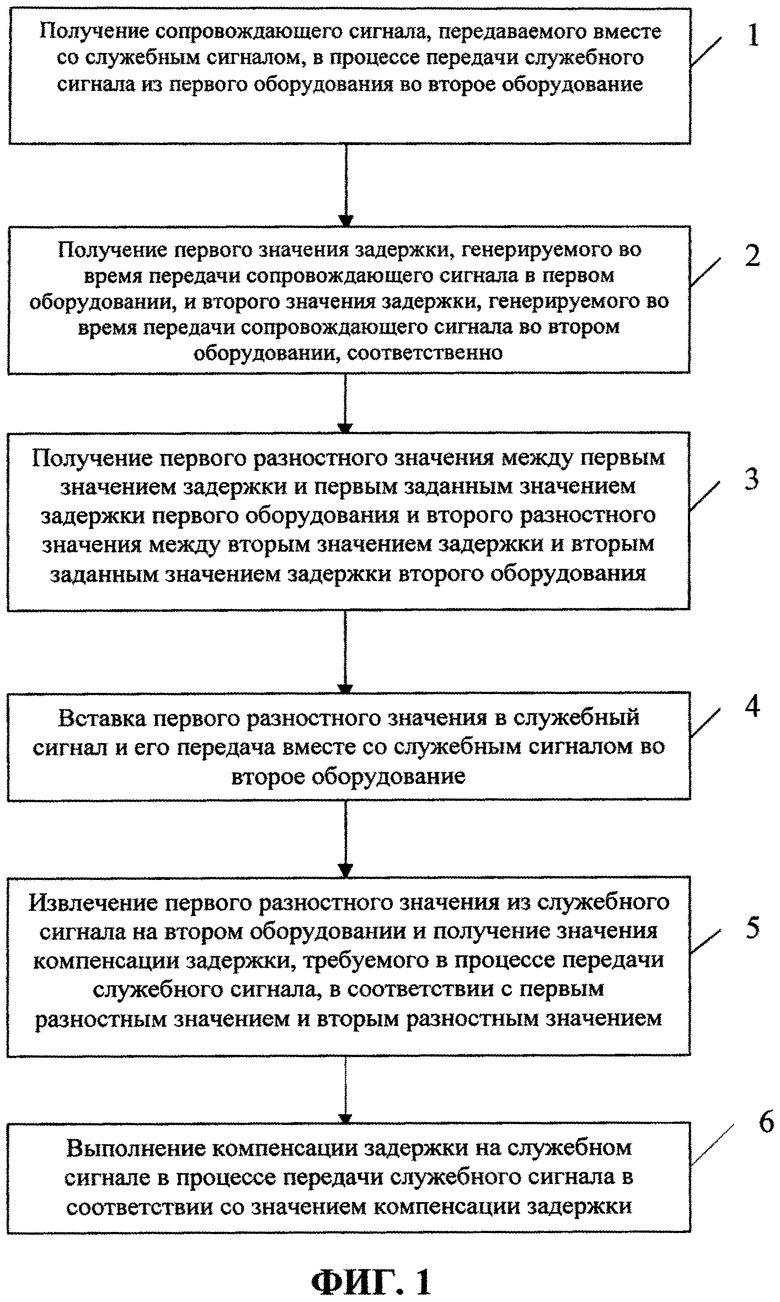
1. Способ компенсации задержки, включающий:
получение сопровождающего сигнала, передаваемого вместе со служебным сигналом, в процессе передачи служебного сигнала из первого оборудования во второе оборудование;
получение первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании, соответственно;
получение первого разностного значения между первым значением задержки и первым заданным значением задержки первого оборудования и второго разностного значения между вторым значением задержки и вторым заданным значением задержки второго оборудования;
вставку первого разностного значения в служебный сигнал и передачу первого разностного значения вместе со служебным сигналом во второе оборудование;
извлечение первого разностного значения из служебного сигнала на втором оборудовании и получение значения компенсации задержки, требуемого в процессе передачи служебного сигнала, в соответствии с первым разностным значением и вторым разностным значением; и
выполнение компенсации задержки на служебном сигнале в процессе передачи служебного сигнала в соответствии со значением компенсации задержки.
2. Способ компенсации задержки по п. 1, отличающийся тем, что этап получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании, соответственно, включает:
извлечение сопровождающего сигнала в первом заданном положении первого оборудования и получение информации сопровождающего сигнала в первом заданном положении;
извлечение сопровождающего сигнала во втором заданном положении первого оборудования и получение информации сопровождающего сигнала во втором заданном положении; и
получение первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании в соответствии с информацией сопровождающего сигнала в первом заданном положении и втором заданном положении.
3. Способ компенсации задержки по п. 1, отличающийся тем, что этап получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании, соответственно, дополнительно включает:
извлечение сопровождающего сигнала в третьем заданном положении второго оборудования и получение информации сопровождающего сигнала в третьем заданном положении;
извлечение сопровождающего сигнала в четвертом заданном положении второго оборудования и получение информации сопровождающего сигнала в четвертом заданном положении; и
получение второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании в соответствии с информацией сопровождающего сигнала в третьем заданном положении и четвертом заданном положении.
4. Способ компенсации задержки по п. 1, отличающийся тем, что первое заданное значение задержки первого оборудования является максимальным значением задержки, измеренным первым оборудованием в заданный период времени, а второе заданное значение задержки второго оборудования является максимальным значением задержки, измеренным вторым оборудованием в заданный период времени.
5. Способ компенсации задержки по п. 4, отличающийся тем, что формула расчета для значения компенсации задержки является следующей:
значение компенсации задержки = (максимальное значение задержки первого оборудования - первое значение задержки) + (максимальное значение задержки второго оборудования - второе значение задержки).
6. Способ компенсации задержки по п. 1, отличающийся тем, что этап выполнения компенсации задержки в процессе передачи служебного сигнала в соответствии со значением компенсации задержки включает:
выполнение компенсации задержки в процессе передачи служебного сигнала посредством очереди «первым пришел, первым вышел» (FIFO); при этом выход очереди FIFO является управляемым посредством значения компенсации задержки.
7. Способ компенсации задержки по п. 6, отличающийся тем, что этап управления выходом очереди FIFO посредством значения компенсации задержки включает:
преобразование значения компенсации задержки в N значений цикла тактового сигнала чтения-записи очереди FIFO в соответствии с тактовым сигналом чтения-записи очереди FIFO; и
последовательный вывод служебных сигналов после записи N служебных сигналов в очередь FIFO,
при этом N является целым числом, которое больше или равно 1.
8. Устройство компенсации задержки, содержащее:
модуль извлечения, выполненный с возможностью получения сопровождающего сигнала, передаваемого вместе со служебным сигналом в процессе передачи служебного сигнала из первого оборудования во второе оборудование;
модуль получения задержки, выполненный с возможностью получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании, и второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании, соответственно;
модуль получения разностного значения, выполненный с возможностью получения первого разностного значения между первым значением задержки и первым заданным значением задержки первого оборудования, и второго разностного значения между вторым значением задержки и вторым заданным значением задержки второго оборудования;
модуль вставки, выполненный с возможностью вставки первого разностного значения в служебный сигнал и передачи первого разностного значения вместе со служебным сигналом во второе оборудование;
модуль получения компенсации, выполненный с возможностью извлечения первого разностного значения из служебного сигнала на втором оборудовании и получения значения компенсации задержки, необходимого в процессе передачи служебного сигнала в соответствии с первым разностным значением и вторым разностным значением; и
модуль компенсации, выполненный с возможностью выполнения компенсации задержки на служебном сигнале в процессе передачи служебного сигнала в соответствии со значением компенсации задержки.
9. Устройство компенсации задержки по п. 8, отличающееся тем, что модуль получения задержки содержит:
первый модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в первом заданном положении первого оборудования и получения информации сопровождающего сигнала в первом заданном положении;
второй модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала во втором заданном положении первого оборудования и получения информации сопровождающего сигнала во втором заданном положении; и
первый подмодуль получения задержки, выполненный с возможностью получения первого значения задержки, генерируемого во время передачи сопровождающего сигнала в первом оборудовании в соответствии с информацией сопровождающего сигнала в первом заданном положении и втором заданном положении.
10. Устройство компенсации задержки по п. 8 или 9, отличающееся тем, что модуль получения задержки дополнительно содержит:
третий модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в третьем заданном положении второго оборудования и получения информации сопровождающего сигнала в третьем заданном положении;
четвертый модуль получения тактового сигнала, выполненный с возможностью извлечения сопровождающего сигнала в четвертом заданном положении второго оборудования и получения информации сопровождающего сигнала в четвертом заданном положении; и
второй подмодуль получения задержки, выполненный с возможностью получения второго значения задержки, генерируемого во время передачи сопровождающего сигнала во втором оборудовании в соответствии с информацией сопровождающего сигнала в третьем заданном положении и четвертом заданном положении.
11. Устройство компенсации задержки по п. 8, отличающееся тем, что первое заданное значение задержки первого оборудования является максимальным значением задержки, измеренным первым оборудованием в заданный период времени; и второе заданное значение задержки второго оборудования является максимальным значением задержки, измеренным вторым оборудованием в заданный период времени.
12. Устройство компенсации задержки по п. 11, отличающееся тем, что формула расчета для значения компенсации задержки является следующей:
значение компенсации задержки = (максимальное значение задержки первого оборудования - первое значение задержки) + (максимальное значение задержки второго оборудования - второе значение задержки).
13. Устройство компенсации задержки по п. 8, отличающееся тем, что модуль компенсации содержит:
подмодуль компенсации, выполненный с возможностью выполнения компенсации задержки в процессе передачи служебного сигнала посредством очереди FIFO, при этом выход очереди FIFO является управляемым посредством значения компенсации задержки.
14. Устройство компенсации задержки по п. 13, отличающееся тем, что подмодуль компенсации содержит:
модуль преобразования, выполненный с возможностью преобразования значения компенсации задержки в N значений цикла тактового сигнала чтения-записи очереди FIFO в соответствии с тактовым сигналом чтения-записи очереди FIFO; и
модуль вывода, выполненный с возможностью последовательного вывода служебных сигналов после записи N служебных сигналов в очередь FIFO,
при этом N является целым числом, которое больше или равно 1.
15. Машиночитаемый носитель данных, содержащий компьютерную программу, при этом компьютерная программа содержит программную команду, которая при исполнении компьютером обеспечивает возможность выполнения компьютером способа по любому из пп. 1-7.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ КОМПЕНСАЦИИ ВНУТРЕННИХ ЗАДЕРЖЕК В ПРЕДЕЛАХ КАЖДОГО УЗЛА И ЗАДЕРЖЕК ПЕРЕДАЧИ МЕЖДУ УЗЛАМИ | 2006 |
|
RU2414070C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

