Изобретение относится к области железнодорожной автоматики, телемеханики и связи, предназначено для оповещения работающих на железнодорожных путях станции о приближении к месту работ железнодорожного подвижного состава и представляет собой технологию применения системы оповещения работающих на путях станции СОПР-160 в структуре системы парковой связи на железнодорожных станциях любого класса, грузовых дворах, депо, промышленных предприятиях и других объектах железнодорожного транспорта.
Известен способ оповещения для работающих на железнодорожных путях с использованием станционной парковой связи, по которому громкоговорящее оповещение работающих на железнодорожных путях станции о приближении подвижного состава к месту работ осуществляется на основании информации, поступающей от системы электрической централизации (ЭЦ), анализирующей движение подвижного состава по станции, информация от системы ЭЦ через локальную сеть поступает на станционный управляющий сервер, который формирует речевые сообщения о приближении подвижного состава к месту работ. Сформированные речевые сообщения с выхода сервера через локальную сеть поступают на трансляционный усилитель, а затем на соответствующую фидерную линию оповещения в системе двухсторонней парковой связи (RU 2497176 С1, опуб. 27.10.2013).
Недостатком данного способа являются передача контрольных сигналов об отсутствии подвижного состава и оповещение о его приближении по фидерным линиям громкоговорящей парковой связи и их слышимость на большой территории. Эти сигналы могут быть приняты другой ремонтной бригадой, к которой эти сигналы не относятся, создавая при этом ложные представления об отсутствии подвижного состава и снижая безопасность ремонтных работ на железнодорожных путях. Кроме этого, громкоговорящее оповещение создает помехи для жильцов жилых домов, окружающих железнодорожный парк.
Известна система «Сирена» оповещения путевых бригад о приближении поезда, которая фиксирует местоположение бригады за счет использования системы спутниковой навигации и ведения радиообмена руководителя путевой бригады с машинистом локомотива («Концепция повышения безопасности движения на основе применения на железных дорогах многофункциональных комплексных систем регулирования движением поездов», Москва, 2006 г., с. 92).
Недостаток данной системы заключается в том, что нахождение путевой бригады не локализовано в общей системе управления и в отсутствие оперативности оповещения путевой бригады из-за необходимости предварительно вести в ручном режиме радиообмен между руководителем путевой бригады и машинистом приближающегося поезда.
Наиболее близким по технической сущности является способ контроля и оповещения о приближении подвижного состава, по которому подвижные единицы рельсового транспорта с исправными комплексными локомотивными устройствами безопасности при исправной связи GSM постоянно взаимодействуют с сервером приложений по каналам мобильной сотовой радиосвязи GSM. Блоки индивидуального оповещения работников путевых бригад также постоянно взаимодействуют с сервером приложений по каналам мобильной сотовой радиосвязи GSM. Приближение подвижных единиц рельсового транспорта к месту проведения работ фиксируется как по GPS координатам местонахождения подвижной единицы, так и по факту прохода ее колес над чувствительными элементами самотестируемых путевых датчиков прохождения колес подвижных единиц рельсового транспорта блоков путевого контроля (RU 2467902 C1, B61L 23/06, 27.11.2012).
Недостатком этой системы являются необходимость использования центрального поста управления (диспетчера) при наличии на участке подвижного состава, не оборудованного комплексным локомотивным устройством безопасности, обеспечивающим GSM радиосвязь, а также отсутствие периодического контроля (каждые 12-15 с) за исправностью системы и отсутствие объективного подтверждения воспроизведения сигналов оповещения блоками индивидуального оповещения.
Задачей настоящего изобретения является создание надежной и эффективной системы оповещения работающих на железнодорожных путях станции о приближении подвижного состава, не оборудованного комплексным локомотивным устройством безопасности, обеспечивающим GSM радиосвязь.
Указанная техническая проблема решается способом оповещения работающих на железнодорожных путях станции, заключающимся в том, что в каждой зоне проведения работ устанавливают коллективный переносимый оповещатель (КПО), вводят в контроллер каждого КПО номер зоны работ, по которому с помощью навигационного приемника КПО, связанного с сетью ГЛОНАСС/GPS, устанавливают координаты зоны работ, при отсутствии подвижного состава приемопередатчик КПО принимает сигналы контроля от стационарной станции оповещения (СРО), а навигационный приемник КПО принимает навигационные сигналы из сети ГЛОНАСС/GPS, сравнивают принятые из сети ГЛОНАСС/GPS координаты с установленными в КПО для данной зоны, при их совпадении и при исправности всех узлов КПО в контроллере КПО формируются квитирующие сигналы, передаваемые с помощью приемопередатчика на СРО, при обнаружении станционной системой (СС) приближающегося к зоне работ подвижного состава передают через СРО на КПО команду на включение оповещения, воспроизводят сигналы оповещения с помощью динамика и оптического излучателя КПО то тех пор, пока от СС через СРО не поступит на КПО сигнал свободности зоны.
Кроме того, одновременно с передачей квитирующих сигналов приемопередатчиком КПО на СРО с помощью передатчика КПО передают сигнал контроля на индивидуальные носимые оповещатели (ИНО).
Кроме того, при воспроизведении сигналов оповещения через динамик КПО передают через приемопередатчик КПО квитирующие сигналы на СРО, содержащие команду на включение сигнализации у дежурного по станции.
Кроме того, при нарушении связи, или при удалении КПО из зоны, или при других отказах КПО с помощью динамика КПО воспроизводят сигнал оповещения иной длительности, чем при приближении состава, и передают с помощью приемопередатчика КПО сигналы на СРО, содержащие команду на включение сигнализации о неисправности КПО у дежурного по станции.
Технический результат, достигаемый предложенным изобретением, заключается в обеспечении оповещения работающих на путях станции о приближении подвижного состава на основе информации о его приближении, получаемой от станционных систем (СС) парковой связи стационарным приемопередатчиком (стационарная радиостанция оповещения - СРО), связанным радиоканалом с коллективными переносимыми оповещателями (КПО), воспроизводящими звуковые и оптические сигналы, и индивидуальными носимыми оповещателями (ИНО), переходящими в режим вибрации и воспроизводящими звуковые и оптические сигналы.
Способ предназначен для оповещения работающих на железнодорожных путях станции о приближении железнодорожного подвижного состава на основании информации, поступающей от станционных систем железнодорожной автоматики и телемеханики (таких, как МПЦ - система микропроцессорной электрической централизации или МАЛС - маневровая автоматическая локомотивная сигнализация), входящих в структуру парковой связи.
Оповещение осуществляется с использованием автономной системы, содержащей стационарную радиостанцию диапазона 160 МГц (СРО - стационарная радиостанция оповещения), управляющий контроллер стационарный (УКС) и сигнальную панель (СП) дежурного по станции. К УКС подключены соответствующие выходы СС.
В отличие от известного способа (RU 2467902 С1), в котором для связи между элементами используется сеть мобильной связи общего пользования, в предложенной системе для связи используются выделенные частоты технологической связи РЖД (151,7-156 МГц), что исключает зависимость от состояния сети (загруженность и т.д.) сторонней организации.
Таким образом, повышение надежности и эффективности оповещения работающих на железнодорожных путях о приближении подвижного состава достигается за счет следующих факторов:
- использование информации от существующих СС;
- использование каналов связи на базе технологической радиосвязи;
- использование коллективных переносимых устройств с навигационной системой ГЛОНАСС/GPS для получения оповещения в заданное место проведения ремонтных работ;
- использование одной частоты для связи со всеми КПО;
- использование носимых индивидуальных оповещателей;
- локальное оповещение в местах проведения работ и использование носимых индивидуальных оповещателей не создают акустических помех для жильцов жилых домов, окружающих железнодорожный парк;
- обеспечение непрерывного контроля функционирования оборудования и каналов связи.
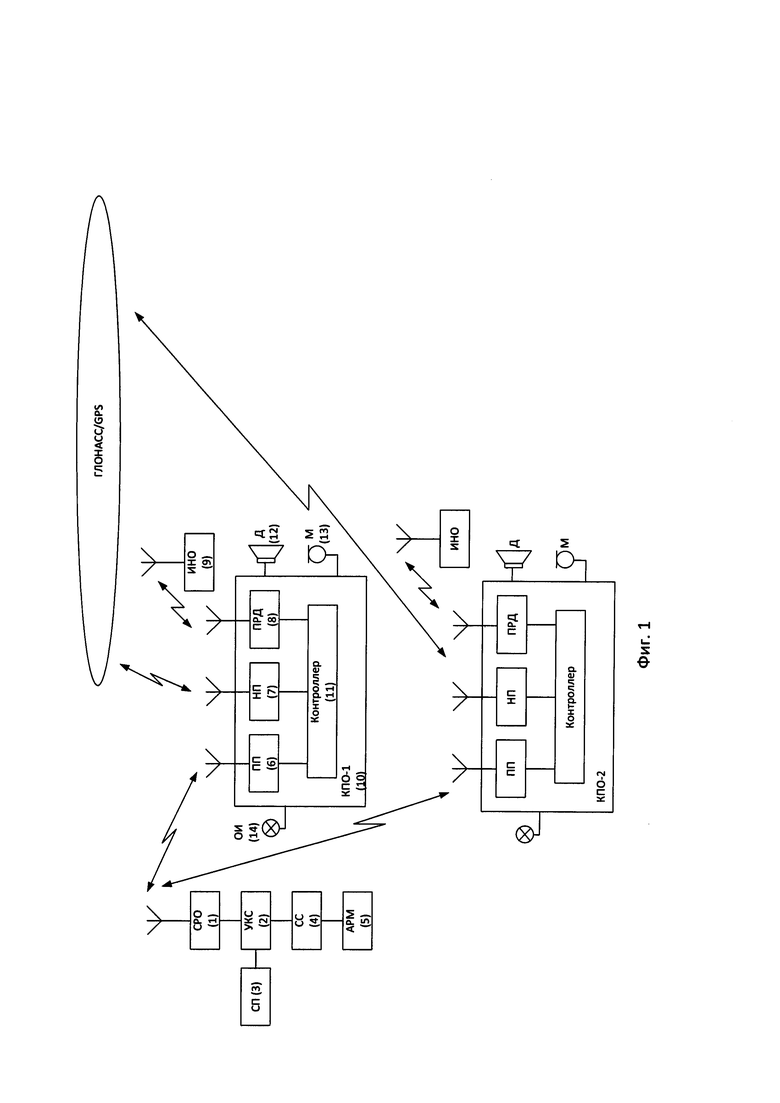
На фиг. 1 представлена структурная схема системы оповещения (СОПР-160), реализующей предложенный способ.
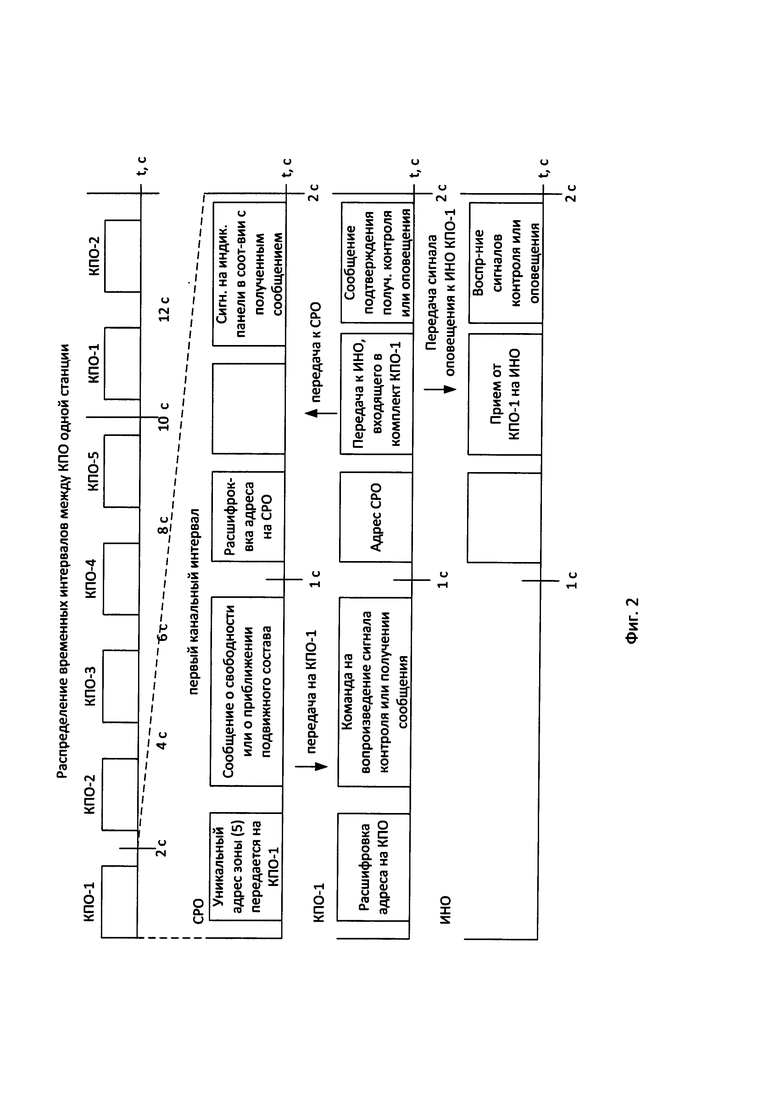
На фиг. 2 представлен алгоритм обмена информацией, используемый в предложенном способе оповещения.
В состав системы оповещения работающих на железнодорожных путях станции СОПР-160 входят:
- стационарный комплект оборудования, содержащий: стационарную радиостанцию 1 оповещения (СРО), соединенный с ней станционный управляющий контроллер 2 (УКС) и сигнальную панель 3 дежурного по станции (СП), соединенную с УКС 2;
- коллективные переносимые оповещатели 10 (КПО), каждый из которых включает приемопередатчик 6 (ПП), навигационный приемник 7 (НП) и передатчик 8 (ПРД), соединенные с контроллером 11;
- индивидуальные носимые оповещатели 9 (ИНО).
Система через стационарную радиостанцию 1 соединена со станционной системой 4 (СС), включающей автоматизированное рабочее место 5 (АРМ).
Для оповещения работающих используется аналоговая радиостанция СРО 1, сопрягаемая через управляющий контроллер УКС 2 со станционной системой 4, имеющей в своем составе автоматизированное рабочее место 5. УКС 2 совместно с сигнальной панелью 3 установлен на рабочем месте дежурного по станции.
С СРО 1 связан по радиоканалу КПО 10, который, в свою очередь, связан по радиоканалу с индивидуальными носимыми оповещателями (ИНО) 9. Каждый КПО 10 комплектуется определенным количеством взаимодействующих с ним ИНО 9.
Способ оповещения работающих на железнодорожных путях станции осуществляется следующим образом.
В предложенной системе СОПР-160 принимается, что на станции имеется 5 единиц КПО. Все зоны работ на станции обозначены номерами с 1 по 5, занесенными в системы СС 4. На фиг. 1 условно показаны два КПО 10: КПО-1 и КПО-2 Для взаимодействия между СРО 1 и всеми КПО 10 на станции используется одна частота. Перед началом работы по запросу бригадира работ дежурный по станции вводит через АРМ 5 в СС 4 номер зоны работ. Указанный уникальный номер зоны бригадир работ устанавливает на клавиатуре КПО 10. При установке номера зоны в КПО 10 автоматически устанавливаются координаты данной зоны, которые сравниваются с получаемыми координатами от навигационного приемника НП 7, связанного с сетью ГЛОНАСС/GPS.
В случае отсутствия подвижного состава при размещении в зоне работ КПО 10 блок приемопередатчика ПП 6 принимает сигналы контроля от СРО 1 и навигационные сигналы системы ГЛОНАСС/GPS через блок навигационного приемника НП 7.
При совпадении принятых из сети ГЛОНАСС/GPS координат с установленными в КПО 10 для заданной зоны и при исправности всех узлов КПО 10 в блоке контроллера 11 формируются квитирующие сигналы, передаваемые с помощью ПП 6 на СРО 1. На сигнальной панели СП 3 у дежурного по станции при этом индицируется сигнал о нормальной работе КПО 10. Одновременно КПО 10 через блок передатчика ПРД 8 передает сигнал контроля на ИНО 9.
Контрольные сигналы воспроизводятся через динамик 12 КПО 10 и через динамик ИНО 9 каждые 10-15 секунд (интервал, равный периоду повторного включения первого временного интервала).
При обнаружении приближающегося к зоне работ подвижного состава от СС 4 прекращается передача команд свободности зоны работ и начинают поступать команды на включение оповещения, которые передаются через СРО 1 на КПО 10.
При воспроизведении сигналов оповещения через динамик 12 от контроллера 11 через приемопередатчик 6 на стационарную радиостанцию 1 оповещения посылаются сигналы квитирования, содержащие сообщения, вызывающие включение соответствующей сигнализации на сигнальной панели 5 у дежурного по станции.
Сигнал оповещения имеет длительность 2 секунды с периодом повтора 4 с. Оповещение должно продолжаться до тех пор, пока от станционной системы 4 не поступит команда свободности зоны.
При нарушении связи, при неисправности динамика Д 12 (контролируется микрофоном М 13), при удалении КПО 10 из заданной зоны и других отказах КПО 10 и ИНО 9 воспроизводится через динамик 12 сигнал оповещения длительностью 1 минута, а на сигнальной панели 3 дежурного отображается сигнал неисправности КПО 10 в конкретной зоне работ.
С целью обеспечения возможности использования одной радиочастоты для организации одновременного оповещения работающих в нескольких зонах станции при наличии до пяти КПО 10 для связи СРО 1 с каждым КПО 10 разработан радиопротокол ведения связи с временным разделением, учитывающий все возможные комбинации состояний системы.
На фиг. 2 представлен алгоритм обмена информацией в системе оповещения (СОПР-160).
Период повторения временных интервалов радиопротокола не более 12-15 секунд.
Каждый КПО 10 взаимодействует с СРО 1 только в своем временном интервале (КПО-1 - в первом интервале, КПО-2 - во втором и т.д.). При увеличении количества КПО (более пяти) временной интервал может быть уменьшен, например, до 0,5 секунд.
Уникальный адрес зоны передается от СРО 1 в соответствующем временном интервале и приниматься тем КПО 10, который находится в заданной зоне (на котором установлен уникальный адрес зоны).
Ниже приведены характеристики узлов, входящих в состав предложенной системы СОПР-160.
Стационарный управляющий контроллер (УКС)
УКС 2 предназначен для обеспечения взаимодействия между СРО 1, СС 4 и сигнальной панелью 3 дежурного по станции (СП).
УКС 2 обеспечивает выполнение следующих основных функций:
- формирование сигналов контроля и оповещения, передаваемых через СРО 1 на КПО 10 при получении соответствующей информации от СС 4 (например, МПЦ);
- прием, дешифрацию и вывод на СП 3 сигналов квитирования (диагностики) от КПО 10.
УКС 2 выполнен в виде единого конструктива с сигнальной панелью 3 дежурного по станции (СП).
Сигнальная панель дежурного по станции (СП).
На лицевой стороне сигнальной панели 3 размещено до 30 групп сигнальных индикаторов для отображения состояния КПО 10. УКС 2 совместно с СП 3 установлены на рабочем месте дежурного по станции.
Коллективный переносимый оповещатель (КПО)
КПО 10 обеспечивает выполнение следующих функций:
- адресный прием радиосигналов контроля и оповещения, передаваемых CPO 1;
- прием навигационных сигналов из сети ГЛОНАСС/GPS;
- трансляцию сигналов контроля и оповещения на индивидуальные носимые оповещатели ИНО 9;
- воспроизведение акустических контрольных сигналов и сигналов оповещения;
- воспроизведение оптических сигналов контроля и оповещения;
- передачу контрольного радиосигнала на СРО 1 (квитанции).
В состав КПО 10 входят:
- приемопередатчик 6 - радиостанция связи с СРО 1;
- приемник 7 навигационных сигналов из сети ГЛОНАСС/GPS;
- передатчик 8 сигналов контроля и оповещения на ИНО 9;
- блок управления с формирователем контрольных тональных сигналов и звукового сигнала оповещения - контроллер 11;
- динамики Д 12;
- панель управления и индикации ПУИ 15;
- оптический излучатель ОИ 14;
- съемный аккумулятор;
- антенны;
- контрольный микрофон М 13.
Перечисленные выше устройства размещены в общем корпусе, удобном для переноски.
КПО 10 имеет следующие акустические параметры:
- звуковой сигнал контроля в диапазоне от 300 до 3500 Гц и продолжительность 1-2 с с периодом повторения каждые 10-15 с. Уровень звукового давления не более 80 дБ и не менее 70 дБ на расстоянии 1 м от динамика 12 по оси громкоговорителя;
- звуковой сигнал оповещения воспроизводится в полосе частот от 60 до 7000 Гц, имеет продолжительность 2 секунды с периодом повторения 4 секунды. Уровень звукового давления в пределах (90±5) дБ на расстоянии 1 м от динамика 12 по оси громкоговорителя.
Оптический сигнал, воспроизводимый КПО 10, отвечает следующим требованиям:
- светодиодный светильник со светодиодами оранжевого цвета свечения суммарной мощностью не менее 10 Вт;
- оптический сигнал оранжевого цвета длительностью приблизительно 0,5 секунд с периодом повторения 4 секунды излучается во время передачи оповещения.
КПО 10 оборудован контроллером 11, обеспечивающим передачу по радиоканалу информации на сигнальную панель 3 дежурного по станции о нормальном функционировании КПО 10 при правильном воспроизведении звуковых сигналов и при нахождении КПО 10 в заданной зоне.
При невыполнении хотя бы одного из данных условий передается сигнал отказа (аварии).
Вес КПО не превышает 3 кг без учета веса крепления.
Конструкция КПО рассчитана на его установку в рабочем положении на земляном полотне.
На панели управления и индикации ПУИ 15 расположены:
- тастатура, обеспечивающая установку уникального адреса КПО;
- ключ-выключатель и индикатор включенного электропитания;
- кнопка ручного включения/выключения режима оповещения;
- сигнальный индикатор нормального функционирования;
- сигнальный индикатор нахождения в заданной зоне;
- сигнальный индикатор нахождения вне заданной зоны;
- сигнальный индикатор отказа (аварии).
Индивидуальные носимые оповещатели (ИНО)
КПО 10 передает на ИНО 9 контрольные сигналы частотой 425 Гц с периодичностью не реже чем один раз в 15 секунд.
КПО 10 передает сигнал оповещения на ИНО 9 с частотой 1 кГц немедленно при срабатывании оповещения по команде с СРО 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ СТАНЦИИ СОПР-160 В СТРУКТУРЕ СИСТЕМЫ ПАРКОВОЙ СВЯЗИ | 2017 |
|
RU2647818C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
| СИСТЕМА СТАНЦИОННОЙ ДВУХСТОРОННЕЙ ПАРКОВОЙ СВЯЗИ И ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ СТАНЦИИ ПО КАНАЛУ РАДИОСВЯЗИ | 2019 |
|
RU2711479C1 |
| Система оповещения работающих на железнодорожных путях | 2017 |
|
RU2658744C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |
| Система аналитики дислокации работников | 2020 |
|
RU2747572C1 |
| СИГНАЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2024 |
|
RU2834653C1 |
| ЦЕНТРАЛИЗОВАННАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМИРОВАНИЯ ПАССАЖИРОВ, ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ И СТАНЦИОННОЙ ПАРКОВОЙ СВЯЗИ | 2012 |
|
RU2497176C1 |
| Автоматизированная система ограждения места работ по текущему содержанию железнодорожного пути с оповещением работающих о приближении подвижного состава без использования сигналистов (СОРБИС-М1) | 2020 |
|
RU2733452C1 |
| Система контроля и оповещения при проведении работ в опасной зоне | 2020 |
|
RU2747307C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики. В способе в каждой зоне работ устанавливают коллективный переносимый оповещатель (КПО), вводят в контроллер каждого КПО номер зоны, по которому с помощью навигационного приемника КПО, связанного с сетью ГЛОНАСС/GPS, устанавливают координаты зоны, при отсутствии подвижного состава приемопередатчик КПО принимает сигналы контроля от стационарной станции оповещения (СРО), а навигационный приемник КПО принимает навигационные сигналы из сети ГЛОНАСС/GPS, сравнивают принятые из сети координаты с установленными в КПО для данной зоны, при их совпадении и при исправности всех узлов КПО в контроллере КПО формируются квитирующие сигналы, передаваемые с помощью приемопередатчика на СРО, при обнаружении станционной системой (СС) приближающегося к зоне работ подвижного состава передают через СРО на КПО команду на включение оповещения, воспроизводят сигналы оповещения КПО до тех пор, пока от СС через СРО не поступит на КПО сигнал свободности зоны. Достигается повышение надежности оповещения работающих на железнодорожных путях. 3 з.п. ф-лы, 2 ил.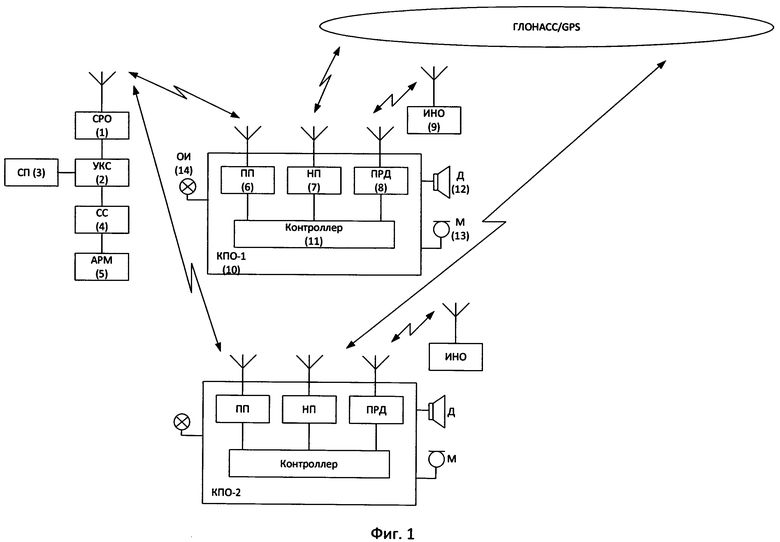
1. Способ оповещения работающих на железнодорожных путях станции, заключающийся в том, что в каждой зоне проведения работ устанавливают коллективный переносимый оповещатель (КПО), вводят в контроллер каждого КПО номер зоны работ, по которому с помощью навигационного приемника КПО, связанного с сетью ГЛОНАСС/GPS, устанавливают координаты зоны работ, при отсутствии подвижного состава приемопередатчик КПО принимает сигналы контроля от стационарной станции оповещения (СРО), а навигационный приемник КПО принимает навигационные сигналы из сети ГЛОНАСС/GPS, сравнивают принятые из сети ГЛОНАСС/GPS координаты с установленными в КПО для данной зоны, при их совпадении и при исправности всех узлов КПО в контроллере КПО формируются квитирующие сигналы, передаваемые с помощью приемопередатчика на СРО, при обнаружении станционной системой (СС) приближающегося к зоне работ подвижного состава передают через СРО на КПО команду на включение оповещения, воспроизводят сигналы оповещения КПО до тех пор, пока от СС через СРО не поступит на КПО сигнал свободности зоны.
2. Способ по п. 1, отличающийся тем, что одновременно с передачей квитирующих сигналов приемопередатчиком КПО на СРО с помощью передатчика КПО передают сигнал контроля на индивидуальные носимые оповещатели (ИНО).
3. Способ по п. 1, отличающийся тем, что при воспроизведении сигналов оповещения КПО передают через приемопередатчик КПО квитирующие сигналы на СРО, содержащие команду на включение сигнализации у дежурного по станции.
4. Способ по п. 1, отличающийся тем, что при нарушении связи, или при удалении КПО из зоны, или при других отказах КПО воспроизводят сигнал оповещения КПО иной длительности, чем при приближении состава, и передают с помощью приемопередатчика КПО сигналы на СРО, содержащие команду на включение сигнализации о неисправности КПО у дежурного по станции.
| СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2583011C1 |
| СИСТЕМА КОНТРОЛЯ И ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2467902C1 |
| Новиков В.Г | |||
| и др | |||
| "Координатная система контроля и оповещения", журнал Вестник, ВНИИЖТ, 2008, N1, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Способ уменьшения пускового момента поршневых компрессоров | 1958 |
|
SU121218A1 |
| Устройство для работы с асфальтовыми массами | 1960 |
|
SU137532A1 |
| JP 2012210869 A, 01.11.2012. | |||

