Изобретение относится к железнодорожному транспорту, в частности к системам оповещения работающих на железнодорожных путях людей, а также машинистов локомотивов о приближении подвижного состава к месту проведения путевых ремонтных работ.
Известна «Система контроля и оповещения о приближении подвижного состава» (патент на изобретение РФ №2467902, опубл. 27.11.2012), содержащая центральный пункт управления, в котором установлены соединенные между собой сервер приложений и сервер GSM радиосвязи, бортовые блоки подвижных единиц рельсового транспорта и блоки индивидуального оповещения, в которую введены блоки путевого контроля, установленные вблизи рельсов в местах точечного контроля приближения подвижных единиц рельсового транспорта к месту проведения путевых работ. Каждый блок путевого контроля состоит из самотестируемого путевого датчика прохождения колес подвижных единиц рельсового транспорта, соединенного двухсторонней связью с приёмопередатчиком совмещённой GSM/GPS радиосвязи и приёмопередатчиком самоорганизующейся сети. Приближение подвижных единиц рельсового транспорта к месту проведения работ фиксируется как по GPS координатам местонахождения подвижной единицы, так и по факту прохода её колёс над чувствительными элементами путевых датчиков прохождения колёс подвижных единиц рельсового транспорта.
Недостатком известной системы является то, что в ней для информирования о приближении подвижного состава используют спутниковую GSM радиосвязь, а использование путевых датчиков является дублирующим. При этом такая связь не является надёжной, поскольку в условиях отсутствия вышек GSM радиосвязи система не сможет функционировать корректно. Кроме того, данной системой не предусмотрена возможность определения с помощью только путевых датчиков прохождения колес с какой стороны к месту проведения работ приближается подвижной состав.
Известна система «Сирена», которая фиксирует местоположение путевой бригады за счет использования системы спутниковой навигации и ведения радиообмена руководителя путевой бригады с машинистом локомотива (публикации: «Концепция повышения безопасности движения на основе применения на железных дорогах многофункциональных комплексных систем регулирования движением поездов», утверждена президентом ОАО «РЖД» В.И. Якуниным, Москва, 2006 г., а также книга: Пономарев В.М., Левицкий А.Л. «Безопасность труда на железнодорожном транспорте». изд. Транспорт, М., 1992 г., с. 111-112).
При этом известная система обладает следующими недостатками: нахождение путевой бригады не локализовано в общей системе управления движением, а используемая спутниковая связь не всегда является достаточно точной и надёжной. Кроме того, система не предоставляет возможности для оперативного автоматического оповещения путевой бригады о приближении подвижного состава, поскольку такое оповещение осуществляется путём радиообмена между руководителем путевой бригады и машинистом локомотива.
Наиболее близкой по своей технической сущности к заявляемой системе является «Система оповещения работающих на железнодорожных путях станции СОПР-160 в структуре системы парковой связи» (патент на изобретение РФ №2647818, опубл. 19.03.2018 г.), содержащая управляющий контроллер, соединенный со стационарной радиостанцией оповещения и предназначенный для соединения со станционной системой, и индивидуальные носимые оповещатели, характеризующаяся тем, что она снабжена коллективными переносимыми оповещателями, каждый из которых включает контроллер и соединенные с ним приёмопередатчик для радиосвязи со стационарной радиостанцией оповещения, навигационный приёмник для приема сигналов системы ГЛОНАСС/GPS и передатчик для передачи радиосигналов на индивидуальные носимые оповещатели.
При этом оповещение людей, работающих на путях станции о приближении подвижного состава осуществляется на основе информации о его приближении, поступающей от станционных систем железнодорожной автоматики и телемеханики на стационарную радиостанцию оповещения, связанную радиоканалом с коллективными переносимыми оповещателями, воспроизводящими звуковые и оптические сигналы, а также с помощью индивидуальных носимых оповещателей, переходящих в этом случае в режим вибрации и воспроизводящих звуковые и оптические сигналы.
Недостатками известной системы является то, что стационарная радиостанция оповещения должна иметь постоянную и надёжную связь со станционными системами парковой связи, что возможно только на железнодорожной станции или вблизи неё, а использование систем связи ГЛОНАСС/GPS для получения оповещения в заданное место проведения ремонтных работ невозможно в условиях искажений навигационного поля спутниковой связи.
Технической проблемой, решаемой с помощью заявляемого изобретения, является недостаточная надежность работы известных систем оповещения о приближении подвижного состава путевых бригад, находящихся на железнодорожных путях и достаточно удалённых от систем станционной парковой связи, а также в случаях отсутствия надёжной спутниковой связи, GSM-вышек, WiFi-точек и других средств обеспечения позиционирования.
Техническим результатом, достигаемым с помощью заявляемого изобретения, является обеспечение надёжного и оперативного оповещения в автоматическом режиме путевых бригад, осуществляющих ремонтные работы на путях о приближении подвижного состава, а также машиниста локомотива о наличии, либо отсутствии помех на пути движения подвижного состава.
Указанный технический результат достигается за счёт повышения достоверности позиционирования находящихся на железнодорожных путях людей и их своевременного оповещения о приближении подвижного состава за счёт использования системы аналитики дислокации работников, которая включает следующие модули:
- Модули сигнализации занятости путей (МСЗП), устанавливаемые в кабинах локомотивов и предназначенные для информирования машинистов о приближении подвижного состава к месту проведения ремонтных работ;
- Модули ограждения бригады (МОБ), устанавливаемые на месте, вдоль или по периметру рабочей зоны путевой бригады, либо на тележке бригады мобильной диагностики;
- Сигнальные модули индивидуальные (СМИ), носимые каждым рабочим и бригадиром путевой бригады.
Все перечисленные модули взаимосвязаны друг с другом при помощи радиосвязи, за счёт чего система имеет возможность устанавливать факт нахождения или отсутствия людей в рабочей зоне на железнодорожных путях, а также в режиме реального времени определять направление движения и расстояние от приближающегося состава до рабочей зоны, что позволяет своевременно информировать рабочих и бригадира об этом, а машиниста локомотива о наличии, либо отсутствии помех на пути движения состава.
МСЗП обеспечивает приём и передачу сигналов радиосвязи на МОБ, а также служит для информирования машиниста локомотива с помощью световой и/или звуковой сигнализации о наличии, либо об отсутствии помех на пути движения подвижного состава и представляет собой устройство, включающее, по меньшей мере один модем, контроллер и устройства оповещения (например, светодиодный индикатор или звуковой оповещатель), служащие для информирования машиниста о возможности беспрепятственного движения подвижного состава, а также о наличии на путях помех.
Каждый используемый в МСЗП модем устанавливает надёжную радиосвязь между ним и МОБ, а также обеспечивает приём и передачу данных в частотном диапазоне от 866 до 868 МГц с пропускной способностью до 28 Кбит/с и действует на дальних расстояниях до 5 км.
В случае использования в МСЗП двух модемов, оба модема одновременно устанавливают радиосвязь со всеми МОБ, находящимися в их зоне приёма, осуществляя взаимное дублирование работы, тем самым обеспечивая максимальную надёжность работы системы за счёт повышения степени достоверности получаемых и передаваемых данных.
МОБ представляет собой устройство, включающее контроллер, модем, предназначенный для осуществления связи с МСЗП в частотном диапазоне от 866 до 868 МГц, с пропускной способностью до 28 Кбит/с и действующий на дальних расстояниях до 5 км, а также приёмопередатчик, работающий в частотном диапазоне от 3.5 до 6.5 ГГц, ядром которого является сверхширокополосная (СШП) микросхема, позволяющая реализовать связь (приём и передачу сигналов) со всеми доступными для приёма СМИ.
Каждый, используемый в системе МОБ выполняет роль опорной точки, относительно которой в автоматическом режиме определяется местоположение всех, связанных с ним СМИ, при этом данные о местоположении СМИ верифицируются в режиме реального времени с заданной периодичностью (с промежутками в несколько миллисекунд), при этом один или несколько МОБ определяют границы рабочей зоны (диаметр, полосу или полигон), внутри которой ведутся ремонтные работы, либо определяют местоположение тележки бригады мобильной диагностики.
Также, в зависимости от настроек программного обеспечения системы возможно вместо рабочей зоны формирование зоны безопасности. В этом случае передвижение подвижного состава через место проведения работ будет считаться безопасным, если все находящиеся на путях люди находятся в такой зоне безопасности.
МОБ оснащен собственной светозвуковой индикацией, а также его СШП-приёмопередатчик отправляет на все, связанные с ним СМИ сообщения о приближении подвижного состава, а модем передаёт на МСЗП информацию о наличии либо отсутствии помех на пути следования подвижного состава.
Каждый МОБ оснащен аккумулятором, который обеспечивает его нормальную работу в течение всего времени работы путевой бригады (минимум 8 часов без подзарядки), является пыле/влагозащищенным и работает в температурном режиме от - 20 до + 40 градусов Цельсия.
СМИ представляет собой устройство, включающее контроллер и соединенный с ним приёмопередатчик, ядром которого является сверхширокополосная (СШП) микросхема, позволяющая реализовать связь (приём и передачу сигналов) со всеми доступными для приёма МОБ в частотном диапазоне от 3.5 до 6.4 ГГц.
СМИ является индивидуальным устройством связи и служит для индивидуального оповещения при помощи светозвуковой сигнализации и вибрации каждого рабочего или бригадира путевой бригады о приближении подвижного состава.
СМИ могут иметь два варианта конструктивного исполнения:
1) СМИ для рабочих передают на МОБ данные о своём местоположении и получают от МОБ предупреждающие сигналы о приближении подвижного состава к месту проведения работ;
2) СМИ бригадира отличается от СМИ для рабочих наличием средств управления (кнопок, тумблеров и т.п.), которые позволяют бригадиру дублировать автоматическую работу системы и в случае нештатных ситуаций отправлять через МОБ на МСЗП информацию о наличии или отсутствии помех на железнодорожных путях.
Каждый СМИ оснащен аккумулятором, который обеспечивает его нормальную работу в течение минимум 8 часов без подзарядки, является пыле/влагозащищенным и работает в температурном режиме от - 20 до + 40 градусов Цельсия, при этом вес и размеры СМИ позволяют его закреплять на одежде рабочего или бригадира, например, на нагрудном кармане жилетки или на поясе.
Используемая для связи МОБ и СМИ технология СШП характеризуется очень низким уровнем энергопотребления для связи с высокой пропускной способностью до 6,5 Мбит/с на коротких расстояниях (в условиях прямой видимости до 50 м). Обмен данными между МОБ и СМИ осуществляется ультракороткими пакетами импульсов с заданной периодичностью (с промежутками в несколько миллисекунд). За счёт чего обеспечивается высокая скорость обмена данными между всеми устройствами, благодаря чему в каждый момент времени МОБ известно об точном местоположении каждого связанного с ним СМИ, при этом также обеспечивается высокая точность определения расстояний (до 50 см) между всеми СМИ и МОБ.
Одной из особенностей устройств, работающих с использованием СШП радиосвязи (при ширине относительной спектральной полосы радиосигналов η > 0,25) является то, что с их помощью можно оценить расстояние между передатчиком и приёмником с точностью до 30 – 50 см, что более чем достаточно для однозначного позиционирования каждого рабочего (его СМИ) относительно опорных маяков системы (МОБ), поскольку такая точность позиционирования соответствует размерам фигуры человека.
Система аналитики дислокации работников работает следующим образом:
Путевая бригада перед началом проведения работ, размещается в рабочей зоне и в зависимости от варианта использования системы на железнодорожных путях устанавливает МОБ:
1) Один МОБ, который формирует диаметр рабочей зоны;
2) Два МОБ, расположенные вдоль железнодорожного пути и формирующие рабочую зону, расположенную между этими МОБ;
3) Три и более МОБ, формирующие рабочую зону в форме полигона, например, охватывающего несколько железнодорожных путей.
Кроме того, также возможен вариант размещения одного или нескольких МОБ на тележке в случае использования системы бригадой мобильной диагностики.
Если в системе используют несколько МОБ, то их устанавливают в зоне прямой видимости друг от друга на расстоянии до 50 м.
При подключении питания на каждом МОБ включается приёмник-передатчик радиосигналов дальней связи – модем, предназначенный для обнаружения и обеспечения радиосвязи со всеми доступными МСЗП, а также СШП-приёмопередатчик, предназначенный для связи со СМИ рабочих.
Затем каждый рабочий включает свой СМИ, который устанавливает СШП связь со всеми включенными МОБ, за счёт чего точно определяется его местоположение в рабочей зоне в режиме реального времени.
Установка соединения между несколькими МОБ, между всеми МОБ и СМИ, а также между МОБ и МСЗП, настройка режимов работы всех устройств происходит автоматически при включении питания на этих устройствах в соответствии с заложенным в них программным обеспечением.
Все включенные в работу системы МОБ постоянно получают и отслеживают радиосигналы, исходящие от МСЗП и отправляют на них данные о своём присутствии на пути следования подвижного состава, а также получают подтверждение о получении этих данных. Этот процесс взаимной передачи информации, который длится миллисекунды, обеспечивает возможность системы вычислять расстояние, направление и скорость приближающегося подвижного состава к рабочей зоне.
При этом, каждый из подключённых к системе МОБ не только обменивается данными по СШП-радиоканалу с другими МОБ, но и передаёт на МСЗП информацию о местоположении рабочей зоны (или зоны безопасности), а также об отсутствии, либо о наличии помех на путях, что обеспечивает дополнительную надежность работы системы за счёт избыточности передаваемой информации.
Когда подвижной состав приближается на заранее определённое расстояние до рабочей зоны, достаточное для осуществления перехода рабочих в безопасную зону (как правило, составляющее от 500 м до 1 км), МОБ через СМИ оповещают рабочих об этом с помощью световой и звуковой индикации.
Одновременно МСЗП, получая сигналы от МОБ, оповещает машиниста с помощью световой и/или звуковой сигнализации о наличии, либо отсутствии помех на пути движения подвижного состава.
Бригадир путевой бригады визуально контролирует местоположение рабочих относительно рабочей зоны и при необходимости имеет возможность, в случае нештатной ситуации, дополнительно оповещать машиниста локомотива об отсутствии или присутствии рабочих в рабочей зоне со своего СМИ бригадира, оснащенного соответствующими средствами управления, который через подключённые к нему МОБ передаёт соответствующие сигналы.
Таким образом, обеспечивается надёжное и своевременное оповещение в автоматическом режиме (без использования сигналистов) путевых бригад, работающих на путях о приближении подвижного состава, а также машиниста локомотива о нахождении либо отсутствии рабочих на путях при приближении к месту проведения ремонтных работ.
Принцип работы системы аналитики дислокации работников поясняется на изображениях.
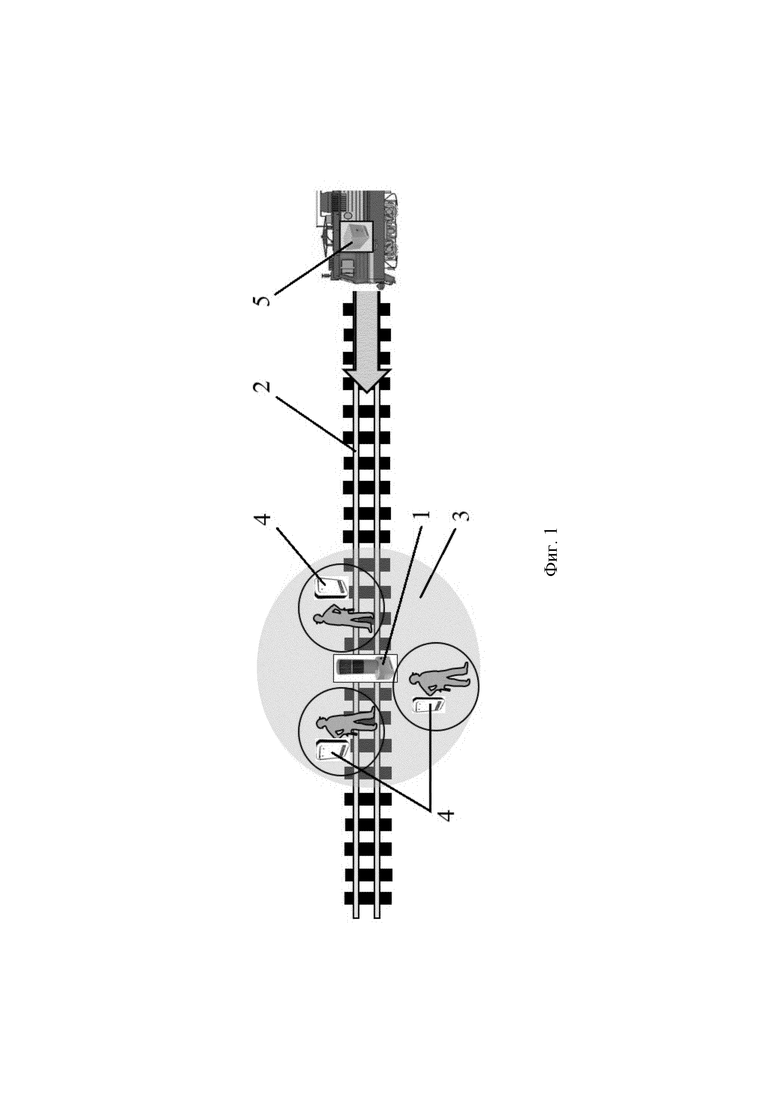
На фиг. 1 показана схема оповещения о приближении подвижного состава при осуществлении контроля дислокации людей, работающих в рабочей зоне, оснащенной одним МОБ.
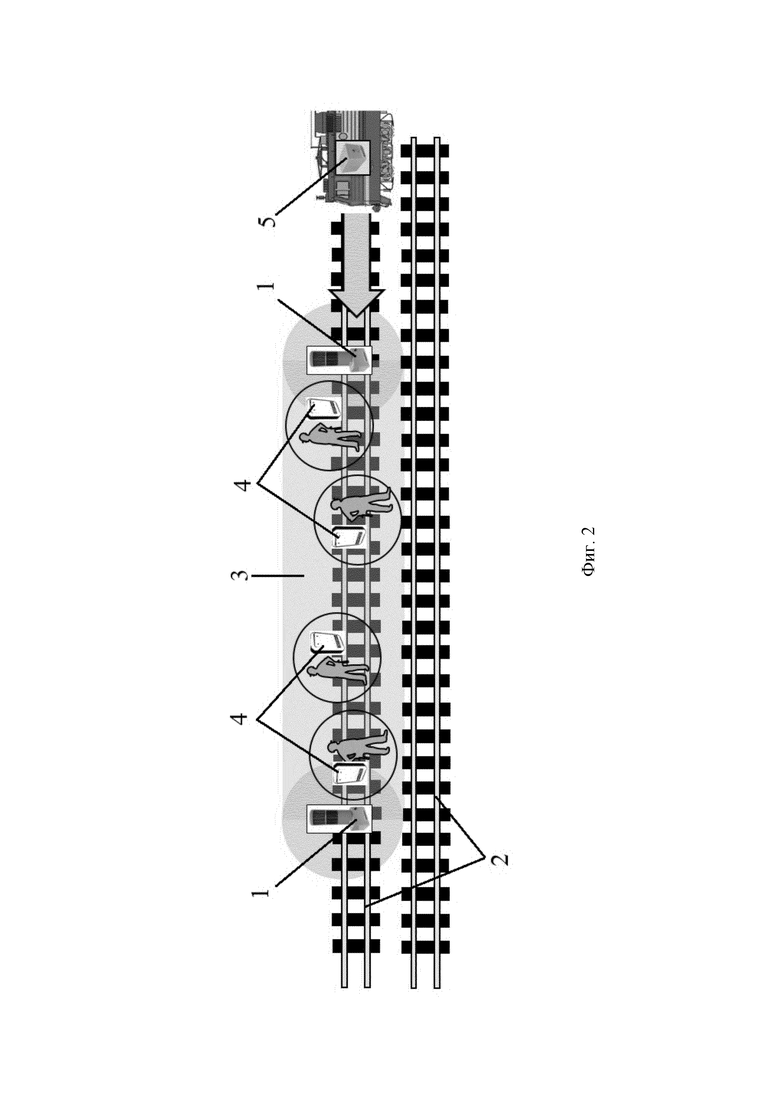
На фиг. 2 показана схема оповещения о приближении подвижного состава при осуществлении контроля дислокации людей, находящихся в рабочей зоне, ограниченной двумя МОБ.
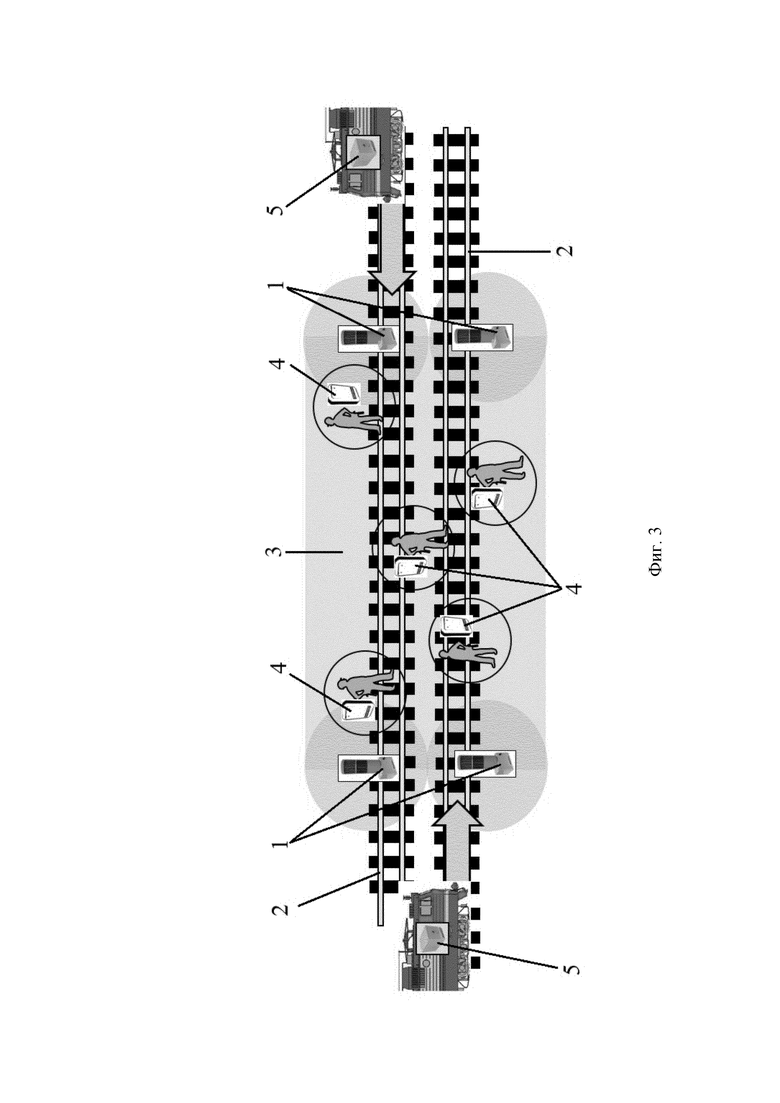
На фиг. 3 показана схема оповещения о приближении подвижного состава при осуществлении контроля дислокации людей, находящихся в рабочей зоне в форме полигона, оснащенной несколькими МОБ (для примера показана рабочая зона в форме четырёхугольника).
На всех фигурах обозначены следующие позиции:
1 – МОБ;
2 – железнодорожные пути;
3 – рабочая зона;
4 – СМИ;
5 – МСЗП.
Бригада рабочих перед началом проведения работ, в зависимости от варианта использования системы, устанавливает и включает один, два или более МОБ (1), располагая их рядом с железнодорожными путями (2), тем самым формируя рабочую зону (3), находящуюся между ними.
Все подключенные к системе МОБ (1) при включении питания в автоматическом режиме устанавливают между собой связь по СШП-радиоканалу.
Затем, каждый рабочий включает свой СМИ (4), при этом в автоматическом режиме устанавливается связь между СМИ (4) и всеми включенными МОБ (1) по СШП-радиоканалу, и система определяет точное местоположение каждого СМИ (4) относительно каждого МОБ (1).
Каждый из включенных в систему МОБ (1) постоянно производит поиск радиосигналов, поступающих от МСЗП (5), установленных на локомотивах подвижных составов. В момент установления радиоконтакта с МСЗП (5) каждый МОБ (1) самостоятельно определяет расстояние до приближающегося состава, скорость и направление его движения.
Далее, когда расстояние от подвижного состава (5) до ближайшего к нему МОБ (1) сократится до заранее заданного значения, все МОБ (1) через СМИ (4) оповещают людей, например, при помощи световой и/или звуковой индикации о его приближении и необходимости покинуть рабочую зону (либо перейти в зону безопасности).
При этом, все подключённые к системе МОБ (1) отслеживают местоположение каждого из СМИ (5), т.е. передвижение самих рабочих.
В случае, если все рабочие (их СМИ) покинули рабочую зону (3) (либо перешли в зону безопасности), один из МОБ (1) передаёт на МСЗП (5) информацию о том, что путь свободен.
В том случае, если МОБ (1) передает на МСЗП (5) информацию о наличии на железнодорожном пути (2) помех, то МСЗП (5) путём подачи соответствующего светового и/или звукового сигнала информирует машиниста о наличие помех на пути. Решение о возможности или невозможности продолжения движения подвижного состава принимает машинист.
Дополнительно СМИ (5) бригадира путевой бригады может быть оснащен кнопками для подачи сигналов и в случае нештатной ситуации он может с помощью своего СМИ (5) через МОБ (1) сообщать на МСЗП (5) о наличии либо отсутствии помех для движения подвижного состава (5), что дополнительно повышает надежность системы.
Таким образом, за счёт использования заявляемой системы аналитики дислокации работников обеспечивается надёжное и своевременное оповещение в автоматическом режиме путевых бригад о приближении подвижного состава, а также машиниста локомотива о нахождении или отсутствии рабочих на путях по ходу его движения.
Используемая для связи МСЗП и МОБ дальняя радиосвязь, осуществляемая при помощи модемов, обеспечивает надёжное обнаружение на дальних расстояниях (до 5 км) подвижного состава, а также позволяет вычислять расстояние, направление и скорость его приближения к рабочей зоне, а связь между МОБ и СМИ, осуществляемая при помощи СШП-приёмопередатчиков, позволяет определять местоположение каждого рабочего путевой бригады с точность до 50 см в режиме реального времени.
При этом используемый в системе способ позиционирования не связан с наличием или отсутствием GSM-вышек, WiFi-точек, погрешностью в точности позиционирования спутниковой связи и других общепринятых средств позиционирования, а также исключается необходимость использования сигналистов в бригаде.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ И ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2019 |
|
RU2728967C1 |
| СИГНАЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2024 |
|
RU2834653C1 |
| СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ СТАНЦИИ СОПР-160 В СТРУКТУРЕ СИСТЕМЫ ПАРКОВОЙ СВЯЗИ | 2017 |
|
RU2647818C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| СПОСОБ ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ СТАНЦИИ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ ПАРКОВОЙ СВЯЗИ | 2017 |
|
RU2648533C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |
| СИСТЕМА ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И ОГРАЖДЕНИЯ УЧАСТКА РАБОТ, РАЗМЕЩАЕМАЯ НА ПУТЕВОЙ МАШИНЕ (СОМП) | 2020 |
|
RU2737976C1 |
| СИСТЕМА КОНТРОЛЯ И ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2467902C1 |
| УСТРОЙСТВО ОПОВЕЩЕНИЯ ПУТЕВЫХ БРИГАД О ПРИБЛИЖЕНИИ ПОЕЗДА | 2014 |
|
RU2571844C1 |
| УСТРОЙСТВО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ СТАНЦИИ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2014 |
|
RU2544778C1 |
Изобретение относится к средствам оповещения путевых рабочих и машинистов о приближении подвижного состава к месту проведения работ. Система включает модули сигнализации занятости путей (5), устанавливаемые в кабинах локомотивов, включающие модем в частотном диапазоне от 866 до 868 МГц, с пропускной способностью до 28 Кбит/с и действующие на расстоянии до 5 км, контроллер и устройства оповещения машиниста, модули ограждения бригады (1) на месте проведения работ, включающие модем для связи с модулями (5) на локомотивах, приёмопередатчик сверхширокополосной связи, работающий в частотном диапазоне от 3.5 до 6.5 ГГц, для связи с сигнальными модулями индивидуальными (4) и информирующий людей, находящихся в рабочей зоне, о приближении подвижного состава, сигнальные модули индивидуальные, носимые каждым рабочим путевой бригады и бригадиром, включающие контроллер и соединенный с ним приёмопередатчик сверхширокополосной связи, работающий в частотном диапазоне от 3.5 до 6.5 ГГц. Достигается повышение надёжности оперативного оповещения путевых бригад и машиниста локомотива в автоматическом режиме. 6 з.п. ф-лы, 3 ил.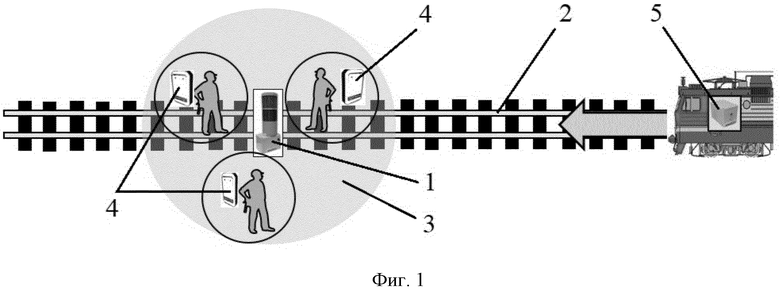
1. Система аналитики дислокации работников, включающая следующие модули:
- модули сигнализации занятости путей, устанавливаемые в кабинах локомотивов, включающие по меньшей мере один модем, обеспечивающий приём и передачу данных в частотном диапазоне от 866 до 868 МГц, с пропускной способностью до 28 Кбит/с и действующий на расстоянии до 5 км, контроллер и устройства оповещения машиниста;
- по меньшей мере один модуль ограждения бригады, устанавливаемый на месте проведения работ, включающий модем, предназначенный для осуществления связи с модулями сигнализации занятости путей и работающий в частотном диапазоне от 866 до 868 МГц, с пропускной способностью до 28 Кбит/с и действующий на расстояниях до 5 км, приёмопередатчик сверхширокополосной связи, работающий в частотном диапазоне от 3.5 до 6.5 ГГц, предназначенный для связи с сигнальными модулями индивидуальными и информирующий при помощи световой и/или звуковой сигнализации всех людей, находящихся в рабочей зоне, о приближении подвижного состава;
- сигнальные модули индивидуальные, носимые каждым рабочим путевой бригады и бригадиром, включающие контроллер и соединенный с ним приёмопередатчик сверхширокополосной связи, работающий в частотном диапазоне от 3.5 до 6.5 ГГц, позволяющий реализовать связь со всеми включёнными в систему модулями ограждения бригады, а также служащий для индивидуального оповещения при помощи световой и/или звуковой сигнализации каждого рабочего или бригадира путевой бригады о приближении подвижного состава.
2. Система аналитики дислокации работников по п.1, отличающаяся тем, что в модулях сигнализации занятости путей используют два и более модемов, дублирующих работу друг друга.
3. Система аналитики дислокации работников по п.1, отличающаяся тем, что местоположение рабочей зоны определяют по одному модулю ограждения бригады, установленному по её центру.
4. Система аналитики дислокации работников по п.1, отличающаяся тем, что местоположение рабочей зоны определяют между двумя модулями ограждения бригады, установленными на её крайних точках.
5. Система аналитики дислокации работников по п.1, отличающаяся тем, что местоположение рабочей зоны определяют между тремя и более модулями ограждения бригады, формирующими полигон.
6. Система аналитики дислокации работников по п.1, отличающаяся тем, что модули ограждения бригады установлены на тележке мобильной бригады диагностики.
7. Система аналитики дислокации работников по п.1, отличающаяся тем, что сигнальный модуль индивидуальный бригадира снабжён устройствами управления.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДАННЫХ В СОТОВОЙ СИСТЕМЕ РАДИОСВЯЗИ | 1996 |
|
RU2172071C2 |

